4.2 Wellen Phänomenologie der Wellenausbreitung
Werbung

4.2
Wellen
Schwingungen
–
period. wechselnde Zustände eines physikalischen Systems
• Periodische Vorgänge an „einem Ort“
• Energie wird periodisch zwischen verschiedenen Formen umgewandelt
Wellen
-
Schwingungen, die sich im Raum ausbreiten
Beispiele …
• Wasserwellen
• Seilwellen
• Elektromagn. Wellen
(Licht, Radio-Wellen, …)
• Signale auf Kabeln (Koaxialkabel, …)
• Materiewellen
(Elektronen, Neutronen, …)
• Schallwellen
(Ultraschall, Körperschall …)
• Stoßwellen
• Erdbebenwellen
• Kette aus gekoppelten Pendeln
• „Schunkel-Welle“ im Bierzelt
In diesem Kapitel sollen zunächst allgemein die wichtigsten Begriffe der eindimensionalen
Wellenausbreitung dargestellt werden . Anschließend (4.2.1.1…) werden spez. Wellen
behandelt (und dabei jeweils die Ausbreitungsgeschw. berechnet!).
Phänomenologie der Wellenausbreitung
Beispiel gek. Pendel:
Fadenpendel
(schwingungsfähige
Systeme), Kopplung
durch Federn
...
Auslenkung von Pendel { bedingt mit zeitl. Verzögerung die Auslenkung von Pendel |
Auslenkung von Pendel | bedingt mit zeitl. Verzögerung die Auslenkung von Pendel }
•
•
Zeitabhängige Veränderung einer physikalischen Größe („Störung“)
⇓
Kopplung einzelner schwingungsfähiger Teile
⇓
Ausbreitung der Störung im Raum
⇓
Transport von Energie (ohne Transport von Materie)
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.1/67
Wellenausbreitung ist mit Transport von Energie verbunden. Charakteristisch ist dabei, daß
Energie zwischen versch. Energieformen ausgetauscht wird (siehe auch harm. Oszillator,
Kap. 4.1.1 !).
Beispiele:
• Welle auf Seil
− Auslenkung
y(x,t)
− Geschwindigkeit vy(x,t)
Ö
Ö
pot. Energie
kin. Energie
• Schallwelle
− Druck
− Schallschnelle
Ö
Ö
pot. Energie
kin. Energie
• elektromagn. Welle
− E-Feld
(→ 4.2.1.2)
p(x,t)
v(x,t)
r
E ( x, t )
r
B( x , t )
− B-Feld
(→ 4.2.1.1)
• Welle (Signal) auf Kabel
− Spannung
U(x,t)
− Strom
I(x,t)
(→ 4.2.1.3)
Ö
elektr. Feldenergie
Ö
magn. Feldenergie
Ö
Ö
(→ 4.2.1.4)
elektr. Feldenergie (in Kapazität)
magn. Feldenergie (in Induktivität)
¾ Ausbreitungsgeschwindigkeit:
y ( x ,t 0 )
x0
y ( x ,t0 + Δt )
x
„Störung“ breitet sich im Raum aus
Δx x1 − x0
Geschw.: c =
=
[Gl.4.2.1.]
Δt
t1 − t 0
x1 x
Zu unterscheiden :
verschiedene Teile der Welle haben …
a) alle gleiche Geschw. c=const.
b) verschiedene Geschw. c ≠ const.
y
t0
c ⋅ Δt
y
t1
t0
x
• keine Dispersion
• Alle Punkte um c ⋅ Δt verschoben
• Form bleibt konst.
y ( x , t ) = y( x − c ⋅ t )
Bsp.: Licht im Vakuum
t1
x
• Dispersion
• Störungen mit versch. Form haben
versch. Geschw.!
• Form ändert sich
y( x , t ) =K
(Fkt. von 2 Veränderl.!)
Bsp.: Licht in Glas (LWL-Kabel)
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.2/67
Wenn keine Dispersion auftritt, so kann die Ausbreitung der Störung in Raum (x) und Zeit (t),
die zunächst von beiden Veränderlichen (x und t) abhängt, durch eine Funktion einer
einzelnen Veränderlichen beschrieben werden: y( x , t ) = y( x − c ⋅ t ) , d.h. um „y(x,t)“ zu
verschiedenen Zeitpunkten zu erhalten, muß man nur den Wellenzug entlang der x-Achse um
c ⋅ Δt verschieben!
Jede beliebige Wellenform kann als Überlagerung von harm. Funktionen dargestellt werden
(Fourieranalyse!).
Dispersion tritt dann auf, wenn die Geschwindigkeit c der einzelnen Fourierkomponenten von
dc
≠ 0)
der Frequenz (bzw. Wellenlänge) abhängt ( c = c( ω ) ,
dω
Von besonderer Bedeutung sind deshalb wieder die …
¾ Harmonische(n) Wellen
y = y( x − c ⋅ t ) : harmon. Funktion,
sin/ cos, e j ... .
Aus Dimensionsgründen muß im Argument noch ein Faktor („k“ , Einheiten: 1/m) auftreten:
y( x , t ) = y0 ⋅ cos( k ⋅ ( x − c ⋅ t ) )
bzw.
y( x , t ) = y0 ⋅ e j ( k ⋅( x −c⋅t ) )
k: Kreiswellenzahl
[k] =
1
m
[Gl.4.2.2.]
Phasengeschwindigkeit: Geschwindigkeit eines Punktes mit konstanter Phase
(„ k ⋅ ( x − c ⋅ t ) “)
x − c ⋅ t = const .
)
x= const . + c ⋅ t
dx
v=
=c
dt
„c“ in cos( k ( x − c ⋅ t ) ) bzw. e
j⋅k ( x − c⋅t )
ist die Phasengeschwindigkeit
Harmonische Fkt. beschreibt Ausbreitung in in Raum (x) und Zeit (t). Für festen Ort
(feste Zeit) ergibt sich eine harm. Fkt der Zeit (des Orts) …
a) Fester Ort x Ö Auslenkung ist periodische Funktion der Zeit (mit der Kreisfreq. ω):
y ~ e j (k ⋅ x − k ⋅c⋅t ) ~ e − j (k ⋅c⋅t ) = e − j⋅ω ⋅t
t
ω = k ⋅c
T
[Gl.4.2.3.]
Zwischen Periodendauer T und Kreisfreq. ω
(bzw. Wellenzahl k und Phasengeschw. c)
2π
besteht der Zusammenhang : ω =
= k ⋅c
T
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.3/67
b) Feste Zeit t Ö Auslenkung ist periodische Funktion des Orts:
j ⋅( k ⋅ x − ω⋅t )
j ⋅k ⋅ x
~e
y~ e
2π-periodisch, d.h. gleicher Funktionswert,
wenn Argument um 2π verändert wird:
x
y (kx ) = y (kx + 2π )
= y (kx + 4π )
= y (kx + 6π )
=K
λ
Dies entspricht im Ort x der Wellenlänge λ: Periode im Raum:
Kreiswellenzahl : k =
k ⋅ λ = 2π
2π
λ
bzw.
[Gl.4.2.4.]
Harmonische Welle in Raum und Zeit …
y ( x, t ) = yˆ ⋅ e j (k ⋅ x −ω⋅t )
= yˆ ⋅ e
2π ⎞
⎛ 2π
j ⎜ ⋅ x − ⋅t ⎟
T ⎠
⎝ λ
[Gl.4.2.5.]
Ergänzung:
Der Ansatz y ( x, t ) = yˆ ⋅ e j (k ⋅x −ω⋅t ) beschreibt nur harmonische Wellen, die sich (1–dimensional!)
in +x-Richtung ausbreiten. Die Verallgemeinerung zu beliebigen Richtungen erhält man,
r
r
wenn man den Vektor k einführt. Die Richtung von k ist die Ausbreitungsrichtung der
r 2π
. Die 3-dimensionale ebene harmonische Welle wird dann
Welle, für den Betrag gilt k =
λ
rr
⎛ x⎞
r
j (k ⋅r − ω⋅t )
e
beschrieben durch
( dabei ist r der Ortsvektor ⎜ y ⎟ ).
⎜ ⎟
⎝z⎠
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.4/67
Analogie zwischen λ und T bzw. zwischen k und ω bei harmonischen Wellen:
Ort
Wellenlänge λ [m]
2π
Wellenzahl1 k =
λ
[1/m]
Zeit
Periodendauer T [s]
2π
[1/s]
Kreisfrequenz ω =
T
ω = k ⋅c
2π
2π ⋅ f =
⋅c
λ
c = λ⋅ f
Phasengeschwindigkeit =
“Länge“ einer Schwingung ⋅
Anz. Schwingungen
Zeit
[Gl.4.2.6.]
¾ Ausbreitungsmedium:
Bei der Wellenausbreitung spielen immer zwei Energieformen eine Rolle (mech. Welle: kin.
u. pot. Energie). Dementsprechend sind auch zur Charakterisierung des Ausbreitungsmediums
(Seil, Luft, Wasser, Kabel, …) 2 „Kennzahlen“ erforderlich (Absorption/ Dämpfung der
Welle werden vorerst nicht betrachtet!):
c Phasengeschwindigkeit c und
d Wellenwiderstand Z
Eine Welle kann sich im Medium nur ungestört ausbreiten, wenn c u. Z konstant sind!
c
Phasengeschwindigkeit
Die Phasengeschwindigkeit „c“ hängt
natürlich von den Eigenschaften des
„Ausbreitungsmediums“ ab…
Bsp.: Pendelkette
c kann z.B. abhängen von …
Federn, Masse, Länge...
Im Kap. 4.2.1.1 etc. wird an einigen Beispielen gezeigt, wie „c“ (aus der „Dynamik“ des spez.
Systems) berechnet wird. Die Vorgehensweise ist dabei ähnlich wie bei der Berechnung der
Schwingungsfrequenz eines Oszillators:
1 Manchmal wird auch die Größe 1 λ (ohne 2π!) als Wellenzahl bezeichnet.
Dies entspricht dann der („gewöhnlichen“) Frequenz f = 1 T (anstatt der Kreisfrequenz)
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.5/67
Berechnung der Schwingungsfrequenz ω0
Berechnung der Phasengeschwindigkeit c
1. Betrachtung der dynamischen
Eigenschaften des Systems
(Mechanik Ö F = m a!)
2. Aufstellen der Differentialgleichung
(diese beschreibt die zeitliche Entwicklung
des Systems)
3. Umformen der DGl. auf Normalform
4. Ablesen der Kreisfrequenz ω0
1. Betrachtung der dynamischen
Eigenschaften des Systems
(Mechanik Ö F = m a!)
2. Aufstellen der Differentialgleichung
(diese beschreibt, wie sich eine „Störung“
in Zeit und Raum ausbreitet)
3. Umformen der DGl. auf Normalform
4. Ablesen der Geschwindigkeit c
d
Wellenwiderstand
Je nach „Härte“ reagiert das Medium auf die Auslenkung („Störung“) mit unterschiedlichem
Widerstand. Betrachen wir z.B. den Erreger einer Sinuswelle. Der Erreger schwingt und wirkt
mit der Kraft FE (t ) = Fˆ ⋅ cos(ωE t ) auf das Medium. Aus der Kraft-Amplitude F̂ und der
„Härte“ des Mediums ergibt sich die maximale Auslenkung ŷ . Mit der Erregerfrequenz ωE
erhält man daraus die Geschwindigkeits-Amplitude v̂ . Als Wellenwiderstand des Mediums
bezeichnet man dann das Verhältnis Z = Fˆ vˆ . Der Wellenwiderstand ist also ein Maß dafür,
welche Kraft („Ursache“) erforderlich ist, um eine gewisse Geschwindigkeit („Wirkung“) zu
erzielen.
4.2.1.1
Wellenausbreitung auf einem Seil, einer Saite
Seil ist mit Kraft F0 gespannt
c
Querschnittsfläche A
ρ
Dichte
Masse pro Länge
dm
= ρ⋅A
dx
[Gl.4.2.7.]
• betrachte ein
„kurzes“
(infinitesimales)
Stück Δx des Seils:
c
F0
c
c
F0
c
Δx
y
α + Δα
Δm
Masse Δm = ρA ⋅ Δx
[Gl.4.2.8.]
α
0
x
• Seil ist gekrümmt Ö Kräfte auf Δm links / rechts sind verschieden, spez. in y-Richtung!
• Die resultierende Kraft
ΔFy = F0 ⋅ (sin (α + Δα ) − sin (α ))
beschleunigt die Masse Δm in y-Richtung:
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.6/67
• Wir betrachten nur kleine Auslenkungen. Dann ist …
∂y
sin (α ) ≈ α ≈ tan (α )
tan (α ) =
≈α
∂x
Die Kraft ergibt sich dann einfach zu
ΔFy = F0 ⋅ Δα
• Es kommt also auf die Veränderung Δα =
∂α
⋅ Δx des Neigungswinkels α (auf dem
∂x
betrachteten Seilstück Δx ) an.
∂y
∂2 y
kann diese durch die 2. Ableitung berechnet werden: Δα = 2 ⋅ Δx
Wg. α =
∂x
∂x
• Somit: Kraft ΔFy auf Masse dm :
ΔFy = F0 ⋅
∂2 y
⋅ Δx
∂x 2
∂2 y
∂t 2
∂2 y
∂2 y
F0 ⋅ 2 ⋅ Δx = (ρ ⋅ A ⋅ Δx ) ⋅ 2
ΔFy = Δm ⋅ a y
Ö
∂x
∂t
Die als „Hilfsgröße“ eingeführte Länge des Seilstücks Δx kürzt sich weg und wir erhalten
die
• Newton II Ö Kraft = Masse * Beschleunigung , a y =
∂2 y ρ ⋅ A ∂2 y
−
⋅
=0
DGl. :
∂x 2
F0 ∂t 2
[Gl.4.2.9.]
Allgemein wird eine (partielle) DGl. dieser Form als
∂2 y
∂2 y
−
const.
⋅
=0
∂x 2
∂t 2
d’Alembertsche „WELLENGLEICHUNG“
[Gl.4.2.10.]
bezeichnet. Sie beschreibt den Zusammenhang zwischen …
• Veränderung der Auslenkung y mit der Zeit t
und
• der Veränderung der Auslenkung y mit dem Ort x.
Die allg. Lösung dieser Wellengl. sind alle Funktionen der Form y ( x, t ) = y ( x − c ⋅ t ) , bei
denen sich ein Wellenzug mit der Geschwindigkeit c in x-Richtung ausbreitet. Wegen …
∂ 2 y ( x − ct )
∂ 2 y ( x − ct )
′
′
y
und
=
⋅
= c{2 ⋅ y′′
2
2
∂x
∂t
Kettenregel!!
wird
∂2 y 1 ∂2 y
− ⋅
= y′′ − y′′ = 0 .
∂x 2 c 2 ∂t 2
Daraus folgt …
• Eine beliebige Funktion y ( x, t ) = y ( x − c ⋅ t ) erfüllt die d’Alembertsche Wellengleichung
und
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.7/67
• Die Konstante „const.“ in der d’Alembertschen Wellengleichung
∂2 y 1 ∂2 y
hat die Bedeutung „1/Geschw.-Quadrat“ ! ∂x 2 − c 2 ⋅ ∂t 2 = 0
• Speziell für eine Welle auf einem Seil erhält man somit
[Gl.4.2.11.]
F0
1 ρ⋅ A
c
=
=
oder
ρ⋅ A
c2
F0
[Gl.4.2.12.]
Insbesondere sind natürlich auch die harmonischen Wellen
y = yˆ ⋅ e j ⋅k ⋅( x −c⋅t ) (bzw. y = yˆ ⋅ e j (k ⋅ x −ω⋅t ) ) Lösungen der Wellen-DGL., wie man schnell
nachrechnen kann …
Ansatz:
y = yˆ ⋅ e j ⋅k ⋅( x −c⋅t )
Ableitungen:
∂2 y
= − k 2 ⋅ y (t ) ,
2
∂x
Einsetzen in DGl.
[− k
es folgt
⎛ 2 k 2c 2 ⎞
⎜⎜ − k + 2 ⎟⎟ ⋅ y (t ) = 0
c ⎠
⎝
2
]
⋅ y (t ) −
∂2 y
= − k 2 c 2 ⋅ y (t )
2
∂t
[
]
1
⋅ − k 2 c 2 ⋅ y (t ) = 0
2
c
9
Ö Ansatz ist eine Lösung der DGl., qed!
Wellenwiderstand des Seils/der Saite :
• Durch Auf- und Abbewegung des Seilendes wird eine
mech. Querwelle erzeugt
• Die harm. Welle sei y ( x, t ) = yˆ ⋅ cos(kx − ωt )
• Sie wird durch eine harmonische Erregerkraft erzeugt
(Seilspannung F0) :
∂y
FE (t ) = − F0
= − F0 yˆ k ⋅ sin (− ωt )
∂x x =0
= Fˆ ⋅ sin (ωt ) mit Fˆ = F yˆ k
0
• Die Geschwindigkeit, mit der sich der Erreger (und der
Anfang des Seils) bewegt, ist
∂y
vE (t ) =
= yˆ ω ⋅ sin (− ωt )
∂t x =0
= −vˆE ⋅ sin (ωt ) mit vˆE = yˆ ω
c
c
c
c
c
c
FE (t)
0
x
• Der Wellenwiderstand Z ergibt sich aus dem Verhältnis von Kraftamplitude zu
Geschwindigkeitsamplitude des Erregers („Ursache“ / „Wirkung“ )…
Fˆ
F yˆ k
Z = E = 0/
vˆE
y/ˆ ω
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.8/67
Mit c =
Z=
F0
oder F0 = c 2 (ρ ⋅ A) , ω k = c ergibt sich
ρ⋅ A
FˆE c 2 (ρA)
=
vˆE
c
4.2.1.2
Z = c(ρA)
[Gl.4.2.13.]
Schallwellen (Longitudinale Elastische Wellen)
(Schall/Ultraschall in Luft, Gasen, Flüssigkeiten, Festkörpern …)
(räumliche)
DruckUnterschiede
Beschleunigung
Kompression
(räumliche)
Geschwindigkeits-Unterschiede
der dazwischenliegenden
Materie
der dazwischenliegenden
Materie
Betrachte „kleines Volumen ΔV“ und EBENE Schallwelle :
− weit weg von punktf. Erreger
− nahe bei großfl., ebenem Erreger
− in Rohr, Stab, …
Ausbreitungsrichtung der Welle
Ö
oder …
oder …
x - Richtung
• Druck („Schallwechseldruck“) und Geschwindigkeit („Schallschnelle“)
hängen von x und t ab:
p = p ( x, t )
v = v ( x, t )
c
v(x)
v(x+Δx)
p(x)
p(x+Δx)
x
x+Δx
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.9/67
c
Druckunterschiede
Masse :
res. Kraft:
Ö
Beschleunigung
Δm = ρ ⋅ ΔV = ρ ⋅ AΔx
Fres = A ⋅ p( x ) − A ⋅ p( x + Δx )
= A ⋅ {p( x ) − p( x + Δx )}
⎧
∂p ⎞⎫
⎛
≈ A ⋅ ⎨ p( x ) − ⎜ p( x ) + Δx ⎟⎬
∂x ⎠⎭
⎝
⎩
∂p
= − A ⋅ Δx
∂x
Fres = m ⋅ a
Newton II :
[Gl.4.2.14.]
∂p
∂v
x⋅
− A ⋅ Δx = ρ1
⋅A
⋅4
Δ
4
2
3
∂t
∂x43
{
142
Δm
a
Fres
−
d
∂p
∂v
= ρ⋅
∂x
∂t
c
Geschwindigkeitsunterschiede
[Gl.4.2.15.]
Ö Volumenänderung (Kompression/Expansion)
falls v( x ) ≠ v( x + Δx ) → Volumen ändert sich : ΔV = ΔV (t ) :
d(ΔV ) A ⋅ {v( x + Δx ) d t − v( x ) d t}
=
dt
dt
∂v
⎧
⎫
= A ⋅ ⎨v( x ) + Δx − v( x )⎬
∂x
⎩
⎭
∂v
=1
A2
⋅Δ
3x ⋅ ∂x
= ΔV
1 d(ΔV ) ∂v
(*)
(relative) Vol.-Veränderung / Zeit:
⋅
=
dt
∂x
ΔV
d(ΔV )
∂p
⇒
Welche Druckveränderung ergibt sich daraus ?
dt
∂t
Kompressibles Medium:
Maß für „Härte“ des Mediums:
Definition:
?
Druck größer Ö Volumen kleiner
Flüssigkeiten, Gase → Kompressionsmodul K
(Festkörper : E-Modul)
1
[Gl.4.2.16.]
K =−
1 dV
V dp
Aus (*) erhält man damit …
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.10/67
1 d(ΔV ) ∂v
⋅
=
ΔV
∂x
dt
1 d(ΔV ) ∂p ∂v
⋅
⋅
=
ΔV d p ∂t ∂x
14243
=−
1
K
-1 ∂p ∂v
⋅
=
K ∂t ∂x
K⋅
∂v
∂p
=∂x
∂t
d
[Gl.4.2.17.]
(1) u. (2) sind zwei gekoppelte Dgl. für Druck p = p( x, t ) und Geschwindigkeit v = v( x, t ) .
Aus diesen Gleichungen läßt sich p (bzw. v) eliminieren, wenn eine Gl. nach x, die andere
nach t differenziert wird …
cÖ
∂ 2v
∂2 p
ρ⋅ 2 = −
∂t
∂x∂t
dÖ
∂2 p
∂ 2v
=K⋅ 2
∂t∂x
∂x
Ø
DGl. für v(x,t): ρ ⋅
∂ 2v
∂ 2v
=
K
⋅
∂t 2
∂x 2
Umformen auf Normalform …
∂ 2v ρ ∂ 2v
− ⋅
= 0 (wieder: d’Alembertsche Wellengl.)
∂x 2 K ∂t 2
Phasengeschwindigkeit:
ρ 1
=
Ö c=
K c2
[Gl.4.2.18.]
K
ρ
K
ρ
[Gl.4.2.19.]
Phasengeschw. einer elast. Längswelle in Medium mit Kompressionsmodul K: c =
Analog …
Dgl. für p = p( x, t ) :
Lösung der 2 Dgl. :
∂2 p ρ ∂2 p
− ⋅
=0
∂x 2 K ∂t 2
Ö c=
K
!
ρ
z.B. ebene harmonische Wellen
j k ⎛⎜ x − ct ⎞⎟⎠
v( x, t ) = vˆ e ⎝
p( x, t ) = pˆ e
j k ⎛⎜⎝ x − ct ⎞⎟⎠
+ p0 (p0 = statischer (Gas-) Druck!)
Zusammenhang Druckamplitude Ù Schnelleamplitude ?
∂p
∂v
−
= ρ⋅
c→
∂x
∂t
⎛⎜
j k x − ct ⎞⎟⎠
j k ⎛⎜ x − ct ⎞⎟⎠
− jkpˆ e ⎝
= ρ(− jkc )vˆ e ⎝
pˆ = (ρ ⋅ c ) ⋅ vˆ
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.11/67
Der gleiche Zusammenhang gilt auch zwischen Druck und Geschwindigkeit des Erregers (der
die Schallwelle erzeugt)
„Ursache“ : Druck , „Wirkung“ : Schnelle
(vergl. E-Technik : Spannung u. Strom !)
U
pˆ
vˆ =
)
[Gl.4.2.20.]
( I=
(ρ ⋅ c )
Z
pE(x)
vE
c
Der Wellenwiderstand (oder : Schallkennimpedanz) für eine ebene Schallwelle ergibt sich
2
pˆ
somit zu Z = = ρ ⋅ c ,
[Z ] = N/m = kg/(m 2s)
.
m/s
vˆ
Wellenwiderstand, Schallkennimpedanz:
Z = ρ⋅c
[Gl.4.2.21.]
Beispiele / Übung …
ρ / (kg/m³)
K / (Pa)
c / (m/s)
Z / (kg/m² s)
Wasser (20°C)
998
2,19 109
........................
........................
Muskel
1040
........................
1568
........................
Knochen
1700
........................
3600
........................
Stahl
7700
........................
5050
........................
--------------------------------------------------------------------------------------------------------------Etwas Thermodynamik : Wie groß ist der Kompressionsmodul K beim „idealen Gas“ ?
pV
= nRm
T
(Rm= 8.31 J/(mol K) allg. Gaskonstante, n : Stoffmenge (mol) )
Zusammenhang zwischen Druck/Volumen/Temp. :
[Gl.4.2.22.]
Bei Schallschwingungen verlaufen Druckänderungen so schnell, daß kein Wärmeaustausch
mit Umgebung stattfinden kann
κ
Ö „adiabatische Zustandsänderung“ :
pV κ = const. oder: p ⋅ V ( p ) = p0 ⋅ V0κ
κ:
„ Adiabatenexponent“,
Luft (u. andere 2-atomige Gase): κ = 1.4
−
1
⎛ p⎞ κ
V ( p ) = V0 ⋅ ⎜⎜ ⎟⎟
⎝ p0 ⎠
1
K =−
= K = p0 ⋅ κ
1 dV
V d p p = p0
p0 κ
K
=
. Bei Gasen hängt
ρ
ρ
die Dichte ρ vom Druck p0 ab. Beim idealen Gas ist (für T=const.) ρ ∝ p0
Damit ergibt sich die Schallgeschwindigkeit in Gasen zu c =
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.12/67
Mit der Zustandsgl. des idealen Gases
pV
p nM Rm
= nRm ergibt sich =
⋅
T
T {
V M
(M: Molmasse)
=ρ
Hier also
p0 Rm
=
T oder c =
ρ
M
Schallgeschwindigkeit
Bsp. Luft: M= 29 g/mol ,
Rm ⋅ T ⋅ κ
M
[Gl.4.2.23.]
c∝ T ,
abhängig von der Temperatur:
unabhängig vom Druck !
leichte Moleküle → c groß !
T = 273 K , c = 331 m/s, Z = ρ ⋅ c = 428 kg/(m² s)
T = 293 K, c(293 K ) = c(273 K ) ⋅
293
=K
273
4.2.1.3 Elektromagnetische Wellen
Elektromagnetische Wellen
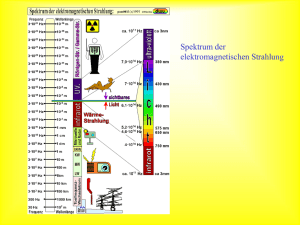
Wellenlängen- bzw. Frequenzbereich elektromagnetischer Wellen
Sichtbares Licht :
elektromagnetische Wellen mit Wellenlängen von 400 nm (blau) bis 800 nm (rot).
Das sichtbare Spektrum
Wie kann sich ein elektrisches / magnetisches Feld als Welle im Raum ausbreiten (ohne dass
dort Ladungen oder Ströme sind, die die Felder erzeugen) ?
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.13/67
Elektrotechnik,
r
r
E - u.B - Felder im Vakuum:
• veränderl. magnetisches Feld
erzeugt elektrisches Feld,
Induktionsgesetz
zeitlich veränderliches
B-Feld
• veränderl. elektrisches Feld
erzeugt magnetisches Feld
zeitlich veränderliches
E-Feld
Ampere-Maxwellsches Gesetz
(„Verschiebungsstrom“)
r
r
• Diese „Verkettung“ von E - u. B -Feld führt zur Wellenausbreitung! Sie wurde von J.C.
Maxwell 1864 vorhergesagt
Ebene2 elektromagnetische (em)-Welle im Vakuum
(Bsp.: Ausbreitungsrichtung: x )
y
r
k
E
r
k : Ausbreitungsrichtung der
Welle
x
z
B
Bei elektromagn. Welle ist
immer …
r r
• E⊥k
r r
• B⊥k
r r
• E⊥B
r
r
• Die Vektoren der elektr. Feldstärke rE und magn. Feldstärke (→ B ) stehen senkrecht
zur Ausbreitungsrichtung (Vektor k ) („Querwelle“) und senkrecht zueinander!
r
r
• E - u. B -Felder schwingen in Phase!
r
r
• Amplituden der E - u. B -Felder sind einander proportional: Eˆ = Bˆ ⋅ c0
[Gl.4.2.24.]
1
• Geschwindigkeit3: c0 =
( = 30 cm / ns)
[Gl.4.2.25.]
μ0 ⋅ ε0
-------------------------------------------------------------------------------------------------------------Diese Ergebnisse können aus den Feldgleichungen der elektr. und magn. Felder abgeleitet
werden. Hier soll lediglich gezeigt werden, wie sich die Wellengl. für em-Wellen im Vakuum
ergibt und wie daraus die Ausbreitungsgeschw. der em-Wellen berechnet wird (die Richtung
r
r
r
von E u. B zueinander und zu k wird hier vorausgesetzt …, läßt sich aber ebenso zeigen).
2
Es werden (wie bei den Schallwellen) – zunächst – nur ebene Wellen betrachtet, d.h. ebene Wellenfronten, die
sich geradlinig ausbreiten. Wenn die Welle sich in x-Richtung ausbreitet, dann sind die E- u. B-Felder
unabhängig von y und z. Streng genommen gibt es keine ebene Wellen… Man erhält aber in guter Näherung
ebene Wellen durch einen großflächigen Erreger oder in großer Entfernung von einem Sender, so daß die
Krümmung der Wellenfront vernachlässigt werden kann.
3 Zur Unterscheidung von der Lichtgeschwindigkeit in einem Medium mit Brechzahl n wird die VakuumLichtgeschwindigkeit hier mit c0 bezeichnet. Es gilt: c = c0 / n .
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.14/67
Maxwell-Gleichungen
E-Technik in 5 Minuten
r
r
4 Gleichungen beschreiben die räumliche und zeitliche Entwicklung des E und B Feldes:
1)
2)
Integralform
r r Q
∫ E ⋅ d a = ε0
O
r r
B
∫ ⋅d a = 0
Gaußsches Gesetz
O
3)
4)
r r
∂ r r
d
E
⋅
s
=
−
B⋅d a
∫
∂t ∫
r r
∂ r r⎞
⎛
∫ B ⋅ d s = μ 0 ⋅ ⎜⎝ I + ε 0 ⋅ ∂t ∫ E ⋅ d a ⎟⎠
„keine magnetische
Monopole“
Induktionsgesetz
Ampère-MaxwellGesetz
Differentialform
r ρ
div E =
ε0
r
div B = 0
r
r
∂B
rot E = −
∂t
r
r
⎛r
∂E ⎞
⎟
rot B = μ 0 ⋅ ⎜⎜ J + ε 0 ⋅
⎟
∂
t
⎝
⎠
Speziell gilt für em-Felder im „Vakuum“ …
keine Ladungen
keine Ströme
Q = 0 ,ρ = 0
r r
I=0, J =0
Dann werden die 1. / 2. sowie die 3. / 4. Gleichung völlig symmetrisch …
• E- u. B- Feld sind quellenfrei
• die zeitl. Veränderung eines Feldes erzeugt jeweils ein Wirbelfeld des anderen Feldes
r r
∂ r r
Nr. 3: Induktionsgesetz : ∫ E ⋅ d s = − ∫ B ⋅ d a
∂t
[Gl.4.2.26.]
r
B -Änderung
B
r
E -Wirbelfeld
Nr. 4: Ampère-Maxwellsches Gesetz :
r
E -Änderung
Bsp.: Induktionsspannung an
Leiterschleife in veränderl.
r r
Magnetfeld U = ∫ E ⋅ d s
r r
∂ r r
B
⋅
d
s
=
μ
ε
⋅
E ⋅d a
0
0
∫
∂t ∫
[Gl.4.2.27.]
r
B -Wirbelfeld
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.15/67
Zur Herleitung der
Wellengleichung setzen wir
voraus, daß das E-Feld in der xy-Ebene, das B-Feld in der x-zEbene liegt. Bei einer ebenen
Welle (Ausbreitungsrichtung:
x) sind die Felder außerdem
unabhängig von y und z !
y
E
c
dx
Rechteck c (vergl. Skizze)
wird vom B-Feld
„durchflutet“
Ö Induktionsgesetz (3.) !
x
dz d
Wir betrachten 2 infinitesimale
Rechtecke:
•
dy
dx
B
z
• Rechteck d wird vom E-Feld „durchflutet“
Ö Ampère-Maxwellsches Gesetz (4.) !
• Induktionsgesetz (3.) Ö c
r r
∂ r r
E
⋅
d
s
=
−
B⋅d a
∫
∂t ∫
c
dy
B
dx
⎞
∂ ⎛
E ( x + d x ) ⋅ d y + 0{ − E ( x ) ⋅ d y + 0{ = − ⋅ ⎜ B ⋅ d x ⋅ d y ⎟
144244
3 oben 1
424
3 unten
23 ⎟
∂t ⎜⎝ 1Fläche!
rechts
links
⎠
∂
(1
E ( x + d x ) − E ( x )) ⋅ d y = − ⋅ (B ⋅ d x ⋅ d y )
44
42444
3
∂t
∂E
⋅d x
∂x
∂B
∂E
=−
∂t
∂x
⋅d y = −
∂B
⋅d x⋅d y
∂t
Z
[Gl.4.2.28.]
• Ampère-Maxwellsches Gesetz (4.) Ö d
r r
∂ r r
B
⋅
d
s
=
μ
ε
⋅
E ⋅d a
0 0
∫
∂t ∫
∂E
(1
⋅d x⋅d z
B( x ) − B( x + d x )) ⋅ d z = μ 0 ⋅ ε 0 ⋅
44
42444
3
∂t
−
∂B
⋅d x
∂x
−
⋅ d z = μ0 ⋅ ε0 ⋅
∂B
∂E
= μ0 ⋅ ε0 ⋅
∂x
∂t
E
dz
d
dx
∂E
⋅d x⋅d z
∂t
[
[Gl.4.2.29.]
•
Aus Z u. [ kann E (oder B) eliminiert werden, indem man eine Gl. nach x, die andere nach t
differenziert …
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.16/67
∂E
∂B
=−
∂x
∂t
Z
−
∂B
∂E
= μ0 ⋅ ε0 ⋅
∂x
∂t
∂
∂x
[
∂
∂t
∂2 E
∂2 B
∂2 B
∂2 E
=
−
=
−
=
ε
⋅
μ
⋅
0
0
∂x 2
∂t ⋅ ∂x
∂x ⋅ ∂t
∂2t
Es ergibt sich
∂2E
∂2E
−
ε
⋅
μ
⋅
=0
0
0
2
∂x 2 123
∂
t
2
[Gl.4.2.30.]
=1 c0 !
(wieder) die d’Alembertsche Wellengleichung!
Die Lösungen (vergl. vorhergehende Kapitel …) der d’Alembertschen Wellengleichung
kennen wir schon: Es sind
1
Wellen, die sich mit der Phasengeschwindigkeit c0 =
(siehe Gl.4.2.25.) ausbreiten!
μ0 ⋅ ε0
Speziell sind natürlich auch wieder harm. Funktionen Lsg. der DGl:
Ebene, harmonische elektromagnetische Welle
E ( x, t ) = Eˆ ⋅ e j⋅k ⋅( x−c0 ⋅t )
B( x, t ) = Bˆ ⋅ e j⋅k ⋅( x−c0 ⋅t )
Welche Beziehung besteht zwischen den Amplituden (und Phasen) der E- und B-Felder ?
∂E
∂B
erhält man …
Mit Gl. :
=−
∂x
∂t
∂E ˆ
∂B
= E ⋅ j ⋅ k ⋅ e j⋅k ⋅( x−c0 ⋅t ) = −
= + Bˆ ⋅ ( j ⋅ k ⋅ c0 ) ⋅ e j⋅k ⋅( x−c0 ⋅t )
∂x
∂t
¼
(Amplitude E) = c⋅(Amplitude B) , siehe Gl.4.2.24.
Eˆ = Bˆ ⋅ c0
(da c0 reell ist folgt daraus auch die Phasengleichheit von E u. B!)
Ergänzung:
∂2E 1 ∂2E
−
= 0 beschreibt Wellen, die
∂x 2 c 2 ∂t 2
sich (eindimensional) in x-Richtung ausbreiten. Im 3-dim. Fall tritt an Stelle der 2. Abl. nach
∂2E ⎛ ∂2E ∂2E ∂2E ⎞
⎟
x die Summe der 2. Ableitungen nach x, y u. z :
→⎜
+
+
∂x 2 ⎜⎝ ∂x 2 ∂y 2 ∂z 2 ⎟⎠
Die d’Alembertsche Wellengleichung in der Form
⎛ ∂2E ∂2E ∂2E ⎞ 1 ∂2E
⎜⎜ 2 + 2 + 2 ⎟⎟ − 2 2 = 0
∂y
∂z ⎠ c ∂t
⎝ ∂x
(Für ebene Wellen, die sich in x-Richtung ausbreiten, hängt E nicht von y, z ab, die entspr.
Ableitungen sind Null und man erhält wieder die 1-dim. Wellengleichung wie oben!)
Ö D’Alembertsche Wellengleichung, 3-dim. :
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.17/67
Wellenwiderstand der em-Welle
Wie bei den anderen Wellentypen auch, kann man bei den elektromagnetischen Wellen eine
Größe „Wellenwiderstand“ definieren, die das Verhältnis von zwei Amplituden beschreibt
und neben der Wellengeschwindigkeit c eine für die Ausbreitung der Welle im betreffenden
Medium wichtige Größe ist. Im Vakuum beschreibt nun die „Lichtgeschwindigkeit“
c0 ≈ 3 ⋅108 m/s offensichtlich nicht nur die Ausbreitungsgeschwindigkeit der elektrischen und
magnetischen Felder, sondern auch das Verhältnis der Amplituden der elektrischen und
magnetischen Komponente der elektromagnetischen Welle. Wenn man nun also den
Wellenwiderstand des Vakuums als (Amplitude E) / (Amplitude B) definiert, dann erhält man
eine Größe von der Dimension einer Geschwindigkeit (vergl. Tabelle), nämlich einfach
gleich c0.
Zur Beschreibung von elektrischen und magnetischen Feldern gibt es aber jeweils zwei
Größen, eine so genannte „Feldstärke“ und eine so genannte „Flussdichte“.
Feldstärke:
Flussdichte:
Elektrisches Feld
r
[E ] = V
E
m
r
r
[D] = As2
D = ε r ε0 ⋅ E
m
[Gl.4.2.31.]
Magnetisches Feld
r
[H ] = A
H
m
r
r
[B] = Vs2 = T
B = μrμ0 ⋅ H
m
Für die Kraftwirkung auf elektrische Ladungen und Ströme werden die Felder E und B
gebraucht. Im Vakuum (ε r = 1, μ r = 1) genügen diese zwei Größen, denn sowohl beim
elektrischen als auch beim magnetischen Feld unterscheidet sich dann die Flussdichte von der
Feldstärke nur jeweils durch eine Naturkonstante (die elektrische bzw. magnetische
Feldkonstante).
Bei der elektrischen und magnetischen Feldern in Materie muss man aber beim elektrischen
Feld zwischen E und D, beim Magnetfeld zwischen H und B unterscheiden.
Man definiert nun den so genannten „Feldwellenwiderstand“ mit H und E:
Feldwellenwiderstand:
Z=
Eˆ
Hˆ
(mit der Einheit [Z ] =
V/m
= Ω !)
A/m
Im Vakuum (Index 0) ist nach Gl.4.2.24. : Eˆ = Bˆ ⋅ c0
Eˆ
Z0 =
= μ 0c0
Somit Eˆ = μ 0c0 ⋅ Hˆ
Hˆ
[Gl.4.2.32.]
μ0
μ0
=
ε0
μ0 ⋅ ε0
Als Zahlenwert ergibt sich der Wellenwiderstand des Vakuums zu
Vs
Z 0 = 4π ⋅10−7 Am
⋅ 2,99792458 ⋅108 ms ≈ 40π ⋅ 2,998 Ω ≈ 376,7 Ω
oder (mit Gl.4.2.25. ) :
Z0 =
In Materie (Index n) ergibt sich Geschwindigkeit und Wellenwiderstand einer
elektromagnetischen Welle mit den zu Gl.4.2.24. und Gl.4.2.25. analogen Beziehungen
• Geschwindigkeit:
cn =
1
μ rμ0 ⋅ εr ε0
[Gl.4.2.33.]
• Feldwellenwiderstand:
Zn =
μrμ0
εr ε0
[Gl.4.2.34.]
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.18/67
Bei den meisten Materialien (insbesondere bei denen, die für sichtbares Licht oder andere
elektromagnetische Wellen durchlässig sind) ist μ r ≈ 1 . Damit gibt es nur noch eine einzige
Materialkonstante (ε r ) , aus der sich dann Wellengeschwindigkeit und Wellenwiderstand
ergeben: cn = c0
ε r (oder cn ~ 1
ε r ) und Z n = Z 0
ε r (oder Z n ~ 1
ε r ). Andererseits
ist die Brechzahl n eines Mediums definiert durch die Beziehung cn = c0 n . Somit gibt es
einen Zusammenhang zwischen den „elektromagnetischen“ und „optischen“
Materialkonstanten:
a) n = ε r
(„Maxwell-Relation“)
b)
Zn = Z0 n
[Gl.4.2.35.]
Häufig benötigt man nur das Verhältnis der Wellenwiderstände von zwei Materialien. Dieses
lässt sich durch das umgekehrte Verhältnis der Brechzahlen ausdrücken:
Z1 n2
=
Z 2 n1
[Gl.4.2.36.]
4.2.1.4 Wellenausbreitung in Kabeln
(Koaxialkabel, Twisted-Pair-Kabel etc.)
Ein weiteres Beispiel für Wellen ist die Ausbreitung von elektrischen Signalen auf Kabeln.
Um ein einfaches Modell zu erhalten, machen wir folgende Annahmen …
1. verlustfreies Kabel
2. kein Ohmscher Widerstand !
3. Kabelkapazität und Induktivität verlustfrei, frequenzunabhängig
• An Kabel liegt Spannung U = U ( x, t ) , fließt Strom I = I ( x, t )
• Suche Dgl., die Ausbreitung eines Signals auf Kabel beschreibt, d.h. mit der bei geg.
Randbed. U = U ( x, t ) und I = I ( x, t ) berechnet werden können
Def.: Kabelkapazität und Induktivität pro Längeneinheit
dC C
C′ =
=
dx l
(ges. Kap. C, ges. Ind. L , Länge des Kabels l )
dL L
L′ =
=
dx l
[Gl.4.2.37.]
Ersatzschaltbild des Kabels:
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.19/67
Betrachte kurzes Kabelstück
I(x)
Δx
• Länge
• Kapazität ΔC = C ′ ⋅ Δx
• Induktivität ΔL = L′ ⋅ Δx
c
I(x+Δx)
d Ic
U(x)
f
e
Δx
x
U(x+Δx)
x+Δx
Masche c Î d Î e Î f:
(L′ ⋅ Δx ) ∂I + U (x + Δx ) + 0 − U (x ) = 0
Für hinreichend kleine Δx gilt
U ( x + Δx ) ≈ U ( x ) +
∂t
∂U
Δx
∂x
(L′ ⋅ Δx ) ∂I + ⎛⎜U (x ) + ∂U Δx ⎞⎟ − U (x ) = 0
∂t ⎝
∂x
⎠
∂U
∂I
= − L′
∂t
∂x
(1)
Knoten d :
I (x ) − I ( x + Δx ) − (C ′ ⋅ Δx )
Für hinreichend kleine Δx gilt
I (x + Δx ) ≈ I ( x ) +
[Gl.4.2.38.]
∂U
=0
∂t
∂I
Δx
∂x
∂I ⎞
∂U
⎛
I (x ) − ⎜ I (x ) + Δx ⎟ − (C ′ ⋅ Δx )
=0
∂t
∂x ⎠
⎝
∂I
∂U
− = C′
(2)
∂t
∂x
[Gl.4.2.39.]
(1) u. (2) sind zwei gek. Dgl. für Spannung U = U ( x, t ) und Strom I = I ( x, t )
Aus den Gl. läßt sich U (bzw. I) eliminieren, wenn eine Gl. nach x, die andere nach t
differenziert wird …
2
2
2
2
(1) ⇒ ∂ U2 = − L′ ∂ I , (2) ⇒− ∂ I = C ′ ∂ U2
∂t∂x
∂x∂t
∂t
∂x
2
2
∂U
∂U
= L′C ′ 2
2
∂x
∂t
∂ 2U
∂ 2U
′
′
−
L
C
=0
∂x 2
∂t 2
Durch Vergleich mit der allg. Wellengl. (d’Alembert-Gl.)
[Gl.4.2.40.]
∂2 y 1 ∂2 y
−
= 0 finden wir die
∂x 2 c 2 ∂t 2
Ausbreitungsgeschwindigkeit eines Signals auf dem Kabel: c =
1
L′C′
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
[Gl.4.2.41.]
S.20/67
Beispiel: Für ein Koax-Kabel mit Innen-/Außenradius ri / ra gilt :
μ μ ⎛r ⎞
2πε 0 ε r
C′ =
,L′ = 0 r ln⎜⎜ a ⎟⎟
2π ⎝ ri ⎠
⎛r ⎞
ln⎜⎜ a ⎟⎟
⎝ ri ⎠
ckoax =
ckoax =
1
2πε0 ε r μ 0μ r ⎛ ra ⎞
⋅
ln⎜ ⎟
⎛ ra ⎞ 2π ⎜⎝ ri ⎟⎠
ln⎜⎜ ⎟⎟
⎝ ri ⎠
=
1
1
⋅
εrμr
ε 0μ 0
12
3
=c0
c0
(< c0 !)
εrμr
Bei einem Kabel mit „typischem“ Dielektrikum ( μ r = 1 , ε r ≈ 2.5 ) beträgt die Signalgeschw.
1
c0 , d.h. „nur“ ca. 60 % der Vakuumlichtgeschwindigkeit!
also ckoax =
2.5
Bei unserem Modell-Kabel hatten wie den ohmschen Widerstand des Kabels vernachlässigt!
Trotzdem hat dieses Kabel aber einen …
Wellenwiderstand
Ein Beispiel soll veranschaulichen, was der „Wellenwiderstand“ eines Kabels bedeutet …
E
• An den Eingang
E eines (sehr
langen)
Koaxkabels wird zur Zeit t = 0 eine Spannung U0 angelegt
• Die „Front“ breitet
sich mit Geschw. c
auf dem Kabel aus
c
U
• Ein immer größerer
Teil der KabelKapazität wird
aufgeladen
Ö es fließt ein Ladestrom !
x
• Solange sich die Wellenfront ungestört weiterbewegt verhält sich das Kabel wie ein
(ohmscher) Widerstand !
Ladung auf Kabel: Q(t ) = U ⋅ (C ′ ⋅ ct )
Strom:
I = Q& = U ⋅ (C ′ ⋅ c )
U
L′C ′
L′
1
=
=
[Gl.4.2.42.]
=
I C′ ⋅ c
C′
C′
• „Typische“ Koaxkabel (z.B. „gelbes“ oder „schwarzes“ Ethernet-Kabel) haben einen
Wellenwiderstand von Z = 50 Ω.
• Der Wellenwiderstand ist charakteristisch für einen Kabeltyp – er hat nichts mit dem
(ohmschen) Durchgangswiderstand des Kabels und nichts mit der Kabellänge zu tun!
• ein 50 Ω-Kabel hat einen Wellenwiderstand von 50 Ω - egal ob es 1 m oder 1 km lang ist!
Wellenwiderstand: Z =
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.21/67
• Wird das Kabel am Ausgang A durch einen Widerstand R = Z abgeschlossen so wird ein!
Puls dort ohne
E
A
Reflexion
„absorbiert“. Das
(endlich lange)
Kabel verhält
R
sich dann genau
so, als ob es
unendlich lange
wäre
• Wird das Kabel durch einen Widerstand R ≠ Z abgeschlossen, offen gelassen ( R = ∞ )
oder kurzgeschlossen ( R = 0 ) so „merken“ wir dieses am Eingang E erst nach der
doppelten Kabellaufzeit!
Ein Puls wird am (nicht mit R=Z abgeschlossenen) Ende reflektiert und erscheint nach der
doppelten Kabellaufzeit wieder am Eingang! Vorzeichen und Amplitude des refl. Pulses
hängen von R ab!
4.2.2 Energietransport und Absorption
Bei Schwingungen/Wellen „pendelt“ Energie zwischen versch. Formen hin und her, z.B. …
a) Elast. Querwelle , Saite/Seil
Harmonischer Oszillator:
kin. Energie
pot. Energie
Maximum der Energie:
1
2
1
2
⋅ c ⋅ ŷ 2
m ⋅ vˆ 2 = 12 m ⋅ (ω ⋅ yˆ )
2
= 12 m ⋅
E potmax = Ekinmax = E ges
Ö Energie eines kurzen Stücks (Länge dx ,
Masse dm) der schwingenden Saite:
c 2
⋅ yˆ
m
dx
ŷ
d E = 12 ⋅ d m ⋅ ω2 ⋅ yˆ 2
A2
⋅ d3x ⋅ ω2 ⋅ yˆ 2
d E = 12 ⋅ ρ 1
x
Volumen
dV
Das Volumen des betrachteten Stücks ist d V = A ⋅ d x , somit die Energiedichte w
(Energie / Volumen)
w=
dE 1
= 2 ⋅ ρ ⋅ ω2 ⋅ yˆ 2
dV
[Gl.4.2.43.]
2
w ∼ (Amplitude) !
Die Energie wird mit der Geschwindigkeit c transportiert. Damit kommt an einer best.
Grenzfläche pro Zeiteinh. und pro Fläche ein von w und c abhängiger Energiebetrag an.
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.22/67
Die
Energie
wird als Intensität I (spez. bei em-Wellen oft auch S) der Welle bezeichnet:
Zeit ⋅ Fläche
Intensität:
I=
1 dE
dE dx
⋅
=
⋅
= w⋅c
A dt 1
A2
⋅ d3x d t
( = E.-Dichte w * Geschw. c )
dV
[Gl.4.2.44.]
[I] = J/(s m²) = W/m²
Spez für die elast. Querwelle auf Seil gilt also
I = 12 ⋅ ρc ⋅ ω2 ⋅ ŷ 2
[Gl.4.2.45.]
Mit der Geschw.-Amplitude vˆ = ωyˆ und dem Wellenwiderstand Z = cρA ergibt sich
I = 12 ⋅ (Z A) ⋅ v̂ 2
[Gl.4.2.46.]
Alternativ läßt sich die Intensität durch die „Kraftamplitude“ Fˆ = F0 k ⋅ yˆ (vergl. 4.2.1.1)
ausdrücken. Mit Fˆ = Z ⋅ vˆ erhält man …
I = 12 ⋅
Z ⋅ vˆ 2
A
Ù
I = 12 ⋅
Fˆ ⋅ vˆ
A
Ù
I = 12 ⋅
Fˆ 2
Z⋅A
.
[Gl.4.2.47.]
Der Energiefluß pro Fläche ist also je nachdem, ob man die Geschwindigkeits- oder die
Kraftamplitude verwendet, proportional oder umgekehrt proportional zum Wellenwiderstand
Z
(vergl. E-Technik, Leistung P = I² ⋅R , P = U I bzw. P = U² / R )
b) Elast. Längswelle, Schall/Ultraschall
Ein Vol.-Element dV, das durch eine Schallwelle die
Maximalgeschwindigkeit v̂ (Amplitude der
Schallschnelle) erreicht, erhält dadurch die max. kin.
Energie d E = 12 ⋅ d m ⋅ vˆ 2 = 12 ⋅ ρ d V ⋅ vˆ 2 . Damit ergibt
sich für eine Schallwelle …
dE 1
= 2 ⋅ ρ ⋅ vˆ 2
dV
Energiedichte :
w=
Intensität (Schallstärke):
I = w⋅c
=Z
I = ⋅ Z ⋅ vˆ
v
dV
[Gl.4.2.48.]
[Gl.4.2.49.]
ρc ) ⋅ vˆ 2
I = 12 ⋅ ({
1
2
c
[Gl.4.2.50.]
2
Mit pˆ = Z ⋅ vˆ (vergl. 4.2.1.2) kann die Schallintensität aber auch durch die Amplitude des
Schallwechseldrucks ausgedrückt werden:
pˆ 2
I = 12 ⋅ Z ⋅ v̂ 2 Ù
I = 12 ⋅ pˆ ⋅ vˆ
Ù I = 12 ⋅
[Gl.4.2.51.]
Z
(vergl. dazu: Welle auf Seil, → a) )
Bsp. 1:
Ein Ultraschallgerät erzeugt bei f = 2 MHz eine Schallintensität von I = 10 W/cm². Mit
c = 1500 m/s und ρ = 103 kg/m³ ergibt sich :
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.23/67
Wellenlänge
λ = c f = 0.75 mm
Schallschnelleamplitude
Schallwechseldruckamplitude
vˆ = 2 I (ρc ) = 0.37 m/s
p̂ = ..................................
Aus der Schallschnelleamplitude kann dann die max. Elongation (Auslenkung) und
Beschleunigung berechnet werden (wie erhält man aus der Geschw. die Beschleunigung, wie
die Auslenkung ?)!
Bsp. 2:
Die kleinste, vom menschlichen Ohr wahrnehmbare Intensität ist etwa Imin = 10-12 W/m² . Die
zugehörigen Amplituden der Schallschnelle und des Schallwechseldrucks ergeben sich daraus
zu
.......................................................................................................................................
Anmerkungen:
1. Häufig werden anstelle der Amplituden (Maximalwerte) die Effektivwerte angegeben. Wie
bei den entsprechenden Wechselstromgrößen gibt es auch hier den Zusammenhang (für
1
1
harmonische Wellen) : peff =
⋅ pˆ bzw. veff =
⋅ vˆ .
2
2
2. Die Schallintensität in Luft wird oft mit Hilfe eines logarithmischen Maßes als
I
dB ;
„Schallintensitäts-Pegel β“ in „Dezibel“ (dB) angegeben. Es ist β = 10lg
I0
dabei ist I0 = 10-12 W/m² die Intensität an der Hörschwelle.
Durch Bewertung mit der frequenzabhängigen Empfindlichkeit des menschlichen Ohres
erhält man daraus die „Lautstärke“ in „Phon“. Bei 1000 Hz entspricht 1 dB gerade 1 Phon.
In der Praxis werden vereinfachte, normierte Bewertungskurven (A-, C-Bewertung)
verwendet und die bewerteten Schallpegel als „dB (A)“ bzw. „dB (C)“ angegeben.
Absorption u. Dämpfung der (Schall-) Welle
Am Beispiel der Schallwelle soll die Schwächung von Wellen beschrieben werden. Durch die
Bewegung der Moleküle treten zusätzlich Reibungskräfte auf (viskose Reibung). Dadurch
wird nach und nach die von der Welle transportierte Energie in Wärme umgesetzt. Bereits
beim ged. harm. Oszillator ergab sich (bei geschwindigkeitsproportionaler Reibung) eine
Amplitudenabnahme gemäß einer exp-Funktion : ∼ exp(-δt).
Eine Welle dringt mit der Geschw. c in ein Medium ein, x = c t. Damit nimmt die Amplitude
auch mit x exponentiell ab:
vˆ( x ) = vˆ0 ⋅ e − αx , pˆ ( x ) = pˆ 0 ⋅ e − αx
Der „Abklingkoeffizient“ α hängt vom Material und von der Frequenz ab.
Da die Schallintensität quadratisch von den Amplituden abhängt, gilt für sie ebenfalls ein expSchwächungsgesetz, allerdings mit dem doppelten Koeffizienten:
I (x ) = I 0 ⋅ (e − αx ) = I 0 ⋅ e −2 αx
2
I (x ) = I 0 ⋅ e −μx
Mit dem Schwächungskoeffizienten μ wird neben der eigentlichen
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.24/67
•
•
(Schall-) Absorption
Streuung
(durch Reibung)
auch die
berücksichtigt, die der der „Schallstrahl“ in eine andere Richtung abgelenkt wird, so daß es in
der ursprünglichen Ausbreitungsrichtung ebenfalls zu einer Intensitätsabnahme kommt.
Aus dem exp-Gesetz ergibt sich, daß bei gleicher Schichtdicke Δx die relative
Intensitätsabnahme immer gleich ist
d I = −μI ( x ) d x
dI
ΔI
oder
= −μ d x bzw. (für kleine Δx ) :
= −μΔx
I
I
Die Schichtdicke, bei der die Intensität auf die Hälfte abgeklungen ist, heißt
ln 2
Halbwertsdicke h. Aus I (h ) = I 0 ⋅ e −μh = 12 I 0 ergibt sich h =
.
[Gl.4.2.52.]
μ
Nach 2 h ist die Intensität auf 1/4 I0, nach 3 h auf 1/8 I0 etc. gesunken.
Bsp.:
a) Fettgewebe , bei f = 0.9 MHz ist h = 7.7 cm , µ = 0.09 1/cm.
b) Knochen, f = 2.5 MHz, h = 0.1 cm, µ = …
c) In Luft ist die Schallabsorption relativ gering (µ hängt außer von der Frequenz
auch z.B. von der Luftfeuchtigkeit ab), bei 1000 Hz ist h ≈ 400 m.
Der Schwächungskoeffizient μ (und demzufolge auch die Halbwertsdicke h) sind meist stark
frequenzabhängig. In Körpergewebe nimmt µ für Ultraschall zwischen 0.2 MHz und 100
MHz annähernd linear mit der Frequenz zu: µ ∼ f . Dadurch bewirkt die Schallabsorption eine
starke Tiefpaßfilterung; Pulsformen von Ultraschallpulsen werden durch Absorption stark
verändert!
c) Energietransport der elektromagn. Welle
Energiedichte des elektrischen / magnetischen Feldes (hier: im Vakuum, ε r = 1,μ r = 1 !):
Idealer Plattenkondensator
(homogenes elektr. Feld)
v U
Elektr. Feld
E =
d
A
Kapazität:
C = ε0
d
(Fläche A, Abstand d)
in aufgeladenem Kondensator gespeicherte
2
1
Energie:
2 CU
Volumen:
V = Ad
Energiedichte
2
/U 2 1 v 2
A
1 CU
1
w= 2
= 2 ε0
= ε0 E
/d 2
Ad
dA
r
r
v r
D = ε 0 E Ö w = 12 E ⋅ D
mit
Lange Zylinderspule
(homogenes magn. Feld)
r
NI
Magn. Feld
B = μ0
l
AN 2
Induktivität: L = μ 0
l
(Fläche A, Länge l, Windungszahlt N)
in stromdurchflossener Spule gespeicherte
2
1
Energie:
2 LI
Volumen:
V = Al
Energiedichte
2
/ N 2I 2 1 1 r 2
A
1 LI
1
w= 2
B
= μ0
=2
/l
lA
Al 2
μ0
r
r
r r
B = μ 0 H Ö w = 12 H ⋅ B
mit
Die Energiedichte eines komb. elektr. und magn. Feldes ergibt sich dann zu
1
w = ⋅ (E ⋅ D + H ⋅ B )
2
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
[Gl.4.2.53.]
S.25/67
elektr.magn.
Energiedichte
Bei einer elektromagnetischen Welle sind E- und B-Feld nicht unabhängig, es gilt der
Zusammenhang E = B ⋅ c (→ 4.2.1.3). Damit läßt sich der „elektrische“ Anteil der
Energiedichte berechnen
1
1
1
1 ε
1 B⋅B
⋅ E ⋅ D = ⋅ ε0 ⋅ E 2 = ⋅ ε0 ⋅ c 2 ⋅ B 2 = ⋅ 0 ⋅ B 2 = ⋅
↑
2
2
2
2 ε0 ⋅ μ0
2 μ0
1
2
c =
ε 0 ⋅μ 0
1
1
⋅E⋅D = ⋅H ⋅B
2
2
[Gl.4.2.54.]
elektrische Energiedichte = magnetische Energiedichte !
) Elektrisches und magnetisches Feld tragen jeweils 50 % zur Energiedichte der
elektromagnetischen Welle bei!
Die gesamte Energiedichte ergibt sich dann zu
1
2
w = ⋅ (E ⋅ D + H ⋅ B ) = ⋅ E ⋅ D = E ⋅ D
2
2
Eine harmonische elektromagnetische
Welle mit der Amplitude Ê des elektr.
Feldes hat als Funktion von x , t die
Feldstärke E = Eˆ ⋅ cos(k ⋅ x − ω ⋅ t )
und die
Energiedichte
w = ε 0 ⋅ Eˆ 2 ⋅ cos 2 (k ⋅ x − ω ⋅ t )
bzw. w = ε 0 ⋅ E 2 ( = μ 0 ⋅ H 2 ) [Gl.4.2.55.]
w
w0
w0 = ε 0 ⋅ Ê 2
w
(x) oder (t)
Die Energiedichte schwankt also räumlich (und zeitlich) zwischen 0 und einem Maximalwert.
Der Mittelwert ist gerade der halbe Maximalwert:
1
mittlere Energiedichte der em-Welle:
w = ⋅ ε 0 ⋅ Eˆ 2
2
1
1
Daraus ergibt sich die mittlere Intensität4: S = w ⋅ c = ⋅ ε 0 ⋅
⋅ Eˆ 2
2
μ0 ⋅ ε0
S=
1 ε0 ˆ 2
⋅
⋅E
2 μ0
[Gl.4.2.56.]
Die Intensität elektromagn. Wellen
S ist gleichzeitig der
r
r wird
r roft mit S (statt I) bezeichnet.
Betrag des „Poyniting-Vektors“ S = E × H . Die Richtung von S ist die der
r r
Wellenausbreitung: S k .
4
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.26/67
Absorption von em-Wellen
Tritt eine em-Welle in Materie (z.B. in Körpergewebe) ein, so kann sie in versch. Weise
Energie abgeben …
Hochfrequenz (> 105 Hz)
• Elektr. Feld Ö Kraft auf elektr. geladenen Teilchen (Ionen)
È
Ö Translationsbew. Ö Reibungseffekte Ö Wärme
Mikrowellen ( ≈ 109 Hz):
• Elektr. Feld Ö Drehmoment auf Moleküle mit perm.
Dipolmomente (z.B. Wasser!)
(bei Wasser z.B. bei ca.
Ö Rotationsbew. Ö Reibungseffekte Ö Wärme
1010 Hz)
• Anregung von Molekülschwingungen,
Wechselwirkung der Lichtquanten (Photonen) mit Atomen,
Molekülen,
Elektronen
Infrarot,sichtb. Licht, UV
(≈ 1012 … 1015 Hz)
… Röntgenstrahlung
Es gilt (wie beim Schall) das exp-Schächungsgesetz (das spez. in der Optik auch
„Lambertsches Extinktionsgesetz“ genannt wird):
I (x ) = I 0 ⋅ e − μx
, µ : Schwächungskoeffizient
µ und die Halbwertsdicke h =
Beispiele:
Muskelgewebe
Wasser
Gold
ln 2
hängen vom Material und von der Frequenz ab.
μ
f = 1 GHz
f = 3.89 1014 Hz (rotes Licht, λ = 770 nm)
f = 5.49 1014 Hz (λ = 546 nm)
h ≈ 1 cm
h ≈ 0.3 m
h ≈ 8 nm
4.2.3 Reflexion von Wellen
Was passiert, wenn eine Welle an das Ende des Mediums bzw. an eine Grenzfläche
(Medium 1 ↔ Medium 2) kommt?
Bei solchen Problemen muß i.allg. zweierlei beachtet werden:
• Energieerhaltung
• Stetigkeit
Wir betrachten zunächst das „Ende“ des Mediums, dann den allg. Fall des Übergangs
zwischen zwei Medien.
4.2.3.1 Reflexion am losen/festen Ende
Die Welle transportiert Energie. Da diese am Ende des Mediums nicht verschwinden kann,
muß die Welle reflektiert werden, wobei die Intensität (Energieflußdichte) der refl. Welle Ir
gleich der der einlaufenden Welle Ie ist (Dämpfung wird hier vernachlässigt):
Ie = Ir
(100% Reflexion)
Da die Intensität quadratisch von der (Geschwindigkeits-, Druck-, E-, B-, …) Amplitude
abhängt, bedeutet dies für den Amplituden-Reflexionsfaktor r = ±1 (das Vorzeichen ist
abhängig davon, ob am „losen“ oder am „festen“ Ende reflektiert wird).
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.27/67
Beispiel: Welle auf Seil (bei anderen Wellen gilt Entsprechendes)
einl. Welle
a) Festes Ende
+
Festes Ende
Ö Auslenkung ist Null!
einlaufende Welle: z.B. Auslenkung +
Ende fest,
0
Ö reflektierte Welle, Auslenkung
reflektierte Welle
-
fest
-!
Reflexion am festen Ende:
• Vorzeichenwechsel , r = - 1 !
• harm. Welle (... sin(...)): Phasensprung 180° (bzw. π)
• Überlagerung einl./refl. Welle: Seilende = 0, fest
einl. Welle
b) Loses Ende
refl. Welle
Ende
beweglich
Reflexion am losen Ende:
• kein Vorzeichenwechsel, r = + 1!
• kein Phasensprung!
Wie können diese Ergebnisse z.B. auf eine Welle auf einem Koax-Kabel übertragen werden ?
• „offenes Ende“ des Kabels (Abschlußwiderstand ∞!) bedeutet für die Spannung U(x,t) …
„festes Ende“
„loses Ende“ ,
r = ...........
• „kurzgeschl. Ende“ des Kabels (Abschlußwiderstand 0!) bed. für die Spannung U(x,t) …
„festes Ende“
„loses Ende“ ,
r = ...........
• Was ändert sich, wenn man anstatt der Spannung den Strom betrachtet ?
4.2.3.2 Reflexion an Grenzflächen
Was passiert, wenn eine Welle an eine Grenzfläche (Medium 1 ↔ Medium 2) kommt?
An der Grenzfläche ändern sich die Eigenschaften des Ausbreitungsmediums:
Phasengeschwindigkeit u. Wellenwiderstand
Beispiel:
Licht
Wasserwelle
Kabel
Schall
Seilwelle
Luft ↔ Glas
Wasserertiefe ändert sich
Übergang zw. versch. Koax-Kabeln
Luft ↔ Wasser
„Knoten“, Übergang zw. Seilen mit versch. A ⋅ ρ
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.28/67
a) Wir betrachten wieder zuerst die Seilwelle:
Medium 1
Z1
Medium 2
Z2
c2
c1
Beim Übergang 1 → 2 bleibt die Frequenz f (bzw. die Kreisfreq. ω) fest.
Wellenwiderstand und Phasengeschwindigkeit c ändern sich!
c
c1 → c2,
damit ändert sich auch die Wellenlänge λ =
!
f
z.B. für c2 < c1 ⇒ λ 2 < λ1
Direkt vor bzw. hinter der Grenzfläche muß die Auslenkung zu jedem beliebigem Zeitpunkt
gleich groß sein (Stetigkeitsbedingung!), damit gilt auch für die Amplitude
Amplitude (links) = Amplitude (rechts) !
Entsprechendes gilt auch für die Geschwindigkeits-Amplitude vˆ = ωyˆ .
f⎫
⎪
yˆ ⎬ fest ,
An der Grenzfläche
vˆ ⎪⎭
c ⎫⎪
Z ⎬ ändern sich !
λ ⎪⎭
Energietransport: Für die Intensität I = w ⋅ c der elast. Querwelle ergab sich (→4.2.2 a) )
I = 12 ⋅ (Z A) ⋅ v̂ 2
Damit ist im allg. der Energiefluß ( = E-Flußdichte * Fläche) vor / hinter der Grenzfläche
verschieden:
I1 ⋅ A1 = 12 v̂12 ⋅ Z1 ⎫⎪
⎬ ⇒ I 1 ⋅ A1 ≠ I 2 ⋅ A 2 !
I 2 ⋅ A 2 = 12 v̂ 22 ⋅ Z 2 ⎪⎭
Wo bleibt die Energie?
• an der Grenzfläche wird ein Teil der Welle reflektiert
• einlaufende u. reflektierte Welle überlagern sich
(kein „Sprung“ im Seil!)
• resultierende Welle ist stetig,
Energie:
„einlaufende Welle“ = „reflektierte Welle“ ⊕ „transmittierte Welle“
Ie = I r + It
(bei konst. Querschnitt A)
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.29/67
Berechnung des Reflexionskoeffizienten für eine „Welle auf Seil“:
dE
= I ⋅ A = 12 ⋅ Aρc ⋅ ω2 ⋅ yˆ 2
dt
Energiefluß
= 12 ⋅ Z ⋅ ω2 ⋅ yˆ 2
O
Energieerhaltung:
2
2
2
1
ˆ2 1
ˆ2 1
ˆ2
2 ⋅ Z 1 ⋅ ω ⋅ y e = 2 ⋅ Z 2 ⋅ ω ⋅ y t + 2 ⋅ Z1 ⋅ ω ⋅ y r
1
42
4 43
4 142
4 43
4 142
4 43
4
einf. Welle
2
2
1
e
r
Stetigkeit:
refl. Welle
Z ⋅ ( yˆ − yˆ ) = Z ⋅ yˆ
yˆ + yˆ r =
yˆ
{
{e
{t
einf. Welle
aus c ¹
transm. Welle
2
2
t
refl. Welle
c
d
transm. Welle
Z1 ⋅ ( yˆ e − yˆ r ) ⋅ ( yˆ e + yˆ r ) = Z 2 ⋅
yˆ 2
{t
= ( yˆ e + yˆ r )2 !
yˆ e − yˆ r Z 2
=
yˆ e + yˆ r Z1
yˆ
Def.: Reflexionskoeffizient r = r
yˆ e
1− r Z2
=
1 + r Z1
Z − Z2
¹
r= 1
(Amplituden-) Reflexionskoeffizient
Z1 + Z 2
Da der Energiefluß proportional zum Amplitudenquadrat ist, ist der
mit d ¹
Reflexionskoeffizient für den Energiefluß
⎛ Z − Z2 ⎞
⎟⎟
R = r = ⎜⎜ 1
Z
+
Z
2 ⎠
⎝ 1
[Gl.4.2.57.]
[Gl.4.2.58.]
2
2
Der Transmissionskoeff. (für die Energie) ist def. durch T = 1 − R = 1 − r 2
[Gl.4.2.59.]
[Gl.4.2.60.]
• für Z1 = Z2 ist r = 0 , R = 0, keine Reflexion, Welle wird 100 % durchgelassen, T = 100 %
• für Z2 = 0 ist r = +1 , R = 100 %, vollständige Reflexion, T = 0 , keine Transmission
Loses Ende → Welle wird ohne Vorzeichenwechsel reflektiert !
• für Z 2 → ∞ wird r = -1 , R = 100 %, vollständige Reflexion, T = 0 , keine Transmission
Festes Ende → Welle wird mit Vorzeichenwechsel reflektiert !
b) Schall
Berechnung des Reflexionskoeffizienten für eine Schallwelle
(bei senkrechtem Einfall):
ˆ2
ˆ2
ˆ2
1 pe
1 pt
1 pr
⋅
=
⋅
+
⋅
Energieerhaltung:
2
2
2
Z
Z
Z
1231
1232
1231
O
einf. Welle
2
2
e
transm. Welle
einf. Welle
refl. Welle
(
Stetigkeit:
)
refl. Welle
Z ⋅ pˆ − pˆ r2 = Z1 ⋅ pˆ t2
pˆ + pˆ r = pˆ t
{
{e
{
c
d
transm. Welle
In c sind gegenüber oben (Welle auf Seil) lediglich Z1 und Z2 vertauscht! Folglich ergibt
eine ähnlich Rechnung wie oben den…
Z − Z1
rp = 2
Reflexionskoeffizienten für die Druckamplitude p̂ :
[Gl.4.2.61.]
Z1 + Z 2
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.30/67
Für die Schallschnelle v̂ gilt dagegen rv = − rp =
Z1 − Z 2
Z1 + Z 2
[Gl.4.2.62.]
2
⎛ Z1 − Z 2 ⎞
⎟⎟
Der Reflexionskoeffizient für die Intensität der Schallwelle ist wie oben R = ⎜⎜
⎝ Z1 + Z 2 ⎠
[Gl.4.2.63.] .
• Wie erreicht man bei Ultraschalluntersuchungen, daß die Ultraschallwelle in das
„Untersuchungsobjekt“ eindringt ?
• Wie groß ist R u. T beim Übergang von Luft zu Wasser ?
• Wie wird beim Ohr erreicht, daß die Schallwelle mit geringsten Reflexionsverlusten von
der Luft in die Flüssigkeit des Innenohres eindringen kann?
c) Kabel
Ein ähnliche Rechnung ergibt für ein Signal auf einem Kabel
Z − Z1
rU = 2
Reflexionskoeffizient für die Spannung Û :
Z1 + Z 2
Z − Z2
Reflexionskoeffizient für den Strom Iˆ :
rI = 1
Z1 + Z 2
[Gl.4.2.64.]
[Gl.4.2.65.]
• für Z1 = Z2 ist rU = 0 , R = 0, keine Reflexion, Welle wird 100 % durchgelassen, T = 100 %
• für Z2 = 0 ist rU = -1 , R = 100 %, vollständige Reflexion, T = 0 , keine Transmission
Kurzgeschl. Ende → Signal wird mit neg. Vorzeichen reflektiert !
• für Z 2 → ∞ wird rU = +1 , R = 100 %, vollständige Reflexion, T = 0 , keine Transmission
Offenes Kabelende → Welle wird ohne Vorzeichenw. reflektiert !
d) elektromagn. Welle, Licht
Bei senkrechtem Einfall von Licht auf eine Grenzfläche gelten die gleichen Regeln …
Zu beachten ist, dass nach Gl.4.2.35. bzw. Gl.4.2.36. der Wellenwiderstand von ε r bzw. vom
1
1
Brechungsindex n abhängt:
Z~ =
n
εr
n −n
Damit wird der Reflexionskoeffizient für das E-Feld
[Gl.4.2.66.]
rE = 1 2
n1 + n2
2
⎛n −n ⎞
und der Reflexionskoeffizient für die Intensität
[Gl.4.2.67.]
R = ⎜⎜ 1 2 ⎟⎟
⎝ n1 + n2 ⎠
Z.B. ist beim Übergang von Luft (n1 = 1 ) zu Glas (n2 = 1.5 ) rE = - 0.2 (negativ, Ö Reflexion
mit Phasensprung am optisch dichteren Medium!) und R = 4 %, d.h. 4 % der Intensität
werden reflektiert, 96 % werden transmittiert!
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.31/67
4.2.4 Stehende Wellen
Durch Reflexion von Wellen kommt es zwangsläufig zur Überlagerung von einlaufender
Welle und reflektierter Welle.
Überlagerung von Wellen entgegengesetzter Ausbreitungsrichtung kann jedoch auch durch
zwei Quellen, die Wellen aufeinander senden, bewirkt werden.
Welche Form der Auslenkung ergibt sich durch Überlagerung einer in +x und einer in -x Richtung laufenden Welle?
Wir betrachten nur den Fall gleicher Frequenz, gleicher Wellenlänge. Außerdem sollen beide
Wellen die gleiche Amplitude haben.
Welle c: y1 = yˆ ⋅ e j (+ k ⋅ x −ω⋅t )
Welle d: y2 = yˆ ⋅ e j (− k ⋅x −ω⋅t )
Bem:
Eine mögl. Phasenverschiebung zwischen den beiden Wellen können wir o.B.d.A.
außer Betracht lassen, wenn der x- und t- Nullpunkt geeigent gewählt wurde!
Überlagerung :
y ( x, t ) = y1 ( x, t ) + y2 ( x, t )
y = yˆ ⋅ (e j⋅k ⋅ x + e − j⋅k ⋅ x )⋅ e − j⋅ω⋅t
14
4244
3
2 cos ( k ⋅ x )
bzw.
y = yˆ ⋅ 2 cos(k ⋅ x ) ⋅ e − j⋅ω⋅t
y = yˆ ⋅ 2 cos(k ⋅ x ) ⋅ cos(ω ⋅ t )
(ohne kompl. Zahlen)
( y ≠ y(k ⋅ x − ω ⋅ t ))
Harmonische Schwingung ∼ e − j⋅ω⋅t , ∼ cos(ω ⋅ t )
Amplitude: 2 ⋅ yˆ ⋅ cos(k ⋅ x ) , ortsabhängig, mit cos-Fkt. „moduliert“ !
• Keine „laufende“ Welle
•
•
Stehende Welle
• alle Punkte schwingen
phasengleich (bzw. um 180°
phasenverschoben),
Knoten ( cos(kx)=0 )
• alle Punkte laufen gleichzeitig
durch Nulllage
• Ampl. ist max. am
„Schwingungsbauch“
• Ampl.=0 am „Knoten“
λ
2
„Bauch“ ( |cos(kx)|=1 )
• Abstand zw. 2 Knoten (2 Bäuchen) : λ/2 !
[Gl.4.2.68.]
Eine „stehende Welle“ kann am einfachsten erzeugt werden, indem man ein Welle an beiden
Enden eines Mediums (einer Leitung) reflektiert. Wenn die Erregerfrequenz passend gewählt
wird, so daß die Länge der Leitung in einem „passenden“ Verhältnis zur Wellenlänge steht, so
bildet sich durch die hin- und herlaufenden Wellen eine stehende Welle (oder
„Eigenschwingung“) aus.
• beide Enden fest/lose:
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.32/67
fest
lose
λ
2
λ
4
λ
2
2⋅
λ
2
λ
2
Beide Enden sind
2⋅
… Knoten
Gesamtlänge (z.B. des Seils):
λ
L = n ⋅ , n = 1,2,3...
2
λ
4
λ
2
… Bäuche
λ
(in beiden Fällen)
ganzzahliges Vielfaches von
2
[Gl.4.2.69.]
• 1 loses und 1 festes Ende:
Ein Ende ist Knoten,
das andere Ende ist Bauch
λ λ
λ
L = n ⋅ + = (2 ⋅ n + 1) ⋅
2 4
4
n = 0,1,2,...
[Gl.4.2.69.]
3⋅
Bsp.: Saite, beide Enden fest
Grundfrequenz:
n-te Oberschwingung:
λ
4
λ
2
L = 1⋅
λ
4
λ1
c
c
=
, λ 1 = 2 ⋅ L , f1 =
2
λ1 2 ⋅ L
c
c
2⋅ L
λ
L = n ⋅ n , λn =
=
⋅ n = n ⋅ f1
, fn =
n
λn 2 ⋅ L
2
4.2.5 Doppler-Effekt
Wenn sich die „Quelle“ (Sender, Erreger) der Welle und/oder der „Beobachter“ (Empfänger)
bewegt, dann unterscheiden sich die Frequenzen der Quelle und des Beobachters. Bei Wellen,
die sich in einem Medium ausbreiten (z.B. Schall) muß unterschieden werden zwischen …
a)
b)
c)
d)
Qz ÍB
Q. ruht
B. bewegt
Q. bewegt
B. ruht
QÎ zB
Q. bewegt
B. bewegt
QÎ ÍB
elektromagnetische Wellen (Licht), Q. u. B. bewegen sich relativ zueinander,
keine Unterscheidung ob sich Q. oder B. bewegen!
Bei b) (Q. bewegt) werden wir zusätzlich den Fall betrachten, daß sich die Quelle mit
Geschwindigkeit vQ > c („Überschallgeschwindigkeit“) bewegt.
Der Doppler-Effekt bewirkt z.B. eine hörbare Frequenzverringerung, wenn ein Auto mit
hoher Geschwindigkeit am Beobachter vorbeifährt. Anwendungsbeispiele:
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.33/67
• Astronomie: Messung der Geschw. von Sternen relativ zur Erde („Rotverschiebung“)
• Medizin: Messung von Strömungsgeschw. (Blut) und Bewegungsabläufen (z.B. Herz)
• Verkehrsüberwachung: Doppler-Radar, Geschw.-Messung mit Mikrowellen
a) Q. ruht, B. bewegt
c
vB
Q
E
c
aus
λ
• Phasengeschw. der Welle: c
Geschw. von B : vB
• Geschw. von B relativ zu einem Punkt konstanter Phase der Welle: v′ = c + vB
λ
λ
• Zeit für eine Wellenlänge
TB = =
v′ c + v B
• Q sendet Welle der Frequenz f Q =
• Frequenz, die B beobachtet:
⎛
v ⎞
f B = f Q ⋅ ⎜⎜1 ± B ⎟⎟
c ⎠
⎝
fB =
1 c + vB c ⎛ vB ⎞
=
= ⋅ ⎜1 + ⎟
λ
λ ⎝
TB
c ⎠
VB
+
Æ
f B > fQ
Q
[Gl.4.2.70.]
-
Q
B
B
VB
f B < fQ
b) B. ruht, Q. bewegt
c
c
vQ
B
Q
Welle wird vor der Quelle „zusammengedrückt“,
hinter der Quelle „auseinandergezogen“:
• Q bewegt sich in einer Periode um vQ ⋅ TQ
• um diesen Betrag verkürzt (bzw. verlängert) sich die Wellenlänge λ: λ B = λ − vQ ⋅ TQ
fB =
c
c
c
1
=
= ⋅
T
λ B λ − vQ ⋅ TQ {
λ
1 − vQ ⋅ Q
fQ
λ
{
1/ c
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.34/67
f B = fQ ⋅
1±
Q
1
vQ
c
[Gl.4.2.71.]
vQ
B
vQ
B
Q
f B > fQ
Ö„-“
f B < fQ
Ö„+“
Die Formel mit „ - “ gilt sicher nur für vQ < c ! Warum ? ....................................................
Was passiert, wenn die Geschwindigkeit der (Schall-) Quelle immer größer wird, d.h. für
vQ → c bzw. vQ > c ?
) Gibt es den Fall vQ = c bzw. vQ > c auch bei elektromagn. Wellen / Licht ? Warum ?
a) im Vakuum ?
.......................................................................
b) in einem Medium mit Brechzahl n ?
.......................................................................
ªWir können uns also für den Fall vQ > c auf Wellen beschränken, die sich in einem Medium
ausbreiten, z.B. …
Schall:
Wenn sich die Schallquelle mit vQ > c
bewegt, muß die räumliche (2- bzw. 3dimensionale)
Ausbreitung
der
Schallwellen beachtet werden (vergl. Kap.
4.2.9).
Die Druckwellen, die zu versch. Zeiten an
verschiedenen Positionen (Skizze → z 1,
z 2, … z 8) z.B. von einem Flugzeug
ausgesandt
wurden,
breiten
sich
kugelförmig aus. Die Überlagerung dieser
Kugelwellen ergibt eine kegelförmige
Wellenfront, den Machschen Kegel. Der
Beobachter, der von dieser Wellenfront
„getroffen“
wird,
hört
dies
als
Überschallknall.
Der Winkel, unter dem sich
Wellenfront ausbreitet, ergibt sich zu
cos θ =
c ⋅ Δt c
= .
v ⋅ Δt v
1
2
c ⋅ Δt
3
4
5
6
7
θ
1
2
3
die
4
5
6
8
7
8
v ⋅ Δt
[Gl.4.2.72.]
( cos θ ≤ 1 ⇒ v ≥ c !)
Elektromagn. Wellen: Bewegt sich ein geladenes Teilchen mit Geschwindigkeit vQ > c0 n
durch ein optisch durchlässiges Medium (Brechzahl n), so tritt der Effekt auch in der Optik
auf. Dieser „optische Überschallknall“ wird dann als „Cerenkovstrahlung“ (z.B. als bläuliches
Leuchten in Wasser) sichtbar.
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.35/67
c) Q. und B. bewegen sich
(Kombination von a) und b) )
Q
vQ
vB
B
Zunächst wird die Frequenz f B′ berechnet, die ein ruhender Beobachter von der bewegten
Quelle empfangen würde (Formel aus b) ). Mit dieser als „neuer Quellenfreq. f Q′ “ errechnet
man dann die Frequenz f B , die der bewegte Beobachter letztlich „sieht“ (Formel aus a) ).:
f Q ⎯Q.
⎯bew.
⎯→ f B′ = f Q′ ⎯Q.
⎯ruht
⎯→ f B
B. ruht
B. bew.
f B = fQ ⋅
Es ergeben sich (je nach Bewegungsrichtung von Q. u. B.) 4 Fälle:
c ± vB
c ± vQ
[Gl.4.2.73.]
Ähnlich sind die Verhältnisse, wenn eine Welle an einem bewegten Objekt reflektiert wird
(z.B. bei Ultraschall-Doppler-Untersuchung). In diesem Fall bewegt sich der „Beobachter
B’ “ (Reflektor) und sendet (als bewegte Quelle Q’ ) eine Welle mit der von ihm
empfangenen Frequenz aus, die schließlich vom ruhenden Beobachter B empfangen wird:
f Q ⎯Q.
⎯ruht
⎯→ f B′ = f Q′ ⎯Q.
⎯bew.
⎯→ f B
B. bew.
B. ruht
d) Elektromagnetische Wellen (Licht)
• kein „Medium“,
Geschwindigkeit der Wellen ist immer c ,
nicht c ± v !!!
• kein Unterschied, ob Q. oder B. bewegt, es kommt nur auf die Relativgeschwindigkeit an!
Aber: Es muß relativistisch gerechnet werden …
• Bei relativistischer Rechnung (Ö Zeitdilatation, bewegte „Uhr“ läuft um Faktor γ
langsamer!) ergibt sich auch eine Frequenzverschiebung, wenn sich die Quelle quer zur
Linie Q-B bewegt: „Transversaler Dopplereffekt“:
TB = γ ⋅ TQ
Q
v
2
[Gl.4.2.74.]
1
1
1
⎛v⎞
fB =
=
= fQ ⋅ = fQ ⋅ 1 − ⎜ ⎟
TB γ ⋅ TQ
γ
⎝c⎠
B
• Bewegen sich Q. und B. aufeinander zu (bzw. voneinander weg), so tritt neben der Zeitdilatation noch der Effekt auf, daß auf Grund des sich verändernden Abstands die Wellenzüge (wie in Fall B. ruht, Q bewegt !) zusammengedrückt (bzw. „auseinandergezogen“)
werden. Somit erhält man für den „longitudinalen Dopplereffekt“:
„Formel aus b)“ * „Zeitdilatation“
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.36/67
f B = fQ ⋅
1
v> 0 Ù Q. u. B. bew. sich aufeinander zu
1
v
1− γ
c
⋅
Q
2
v
B
⎛v⎞
1− ⎜ ⎟
c+v
⎝c⎠
= fQ ⋅
= fQ ⋅
Q
B
v
c−v
v
1−
c
(Formel gilt für beide Fälle!)
[Gl.4.2.75.]
Bewegen sich Q. u. B. voneinander weg, so ist einfach v<0 einzusetzen.
Bei relativistischer Rechnung ergibt sich also für den longitudinalen Dopplereffekt bei emWellen ein Ergebnis, das gerade zwischen den zwei „klassischen“ Fällen „bewegter
Beobachter“ bzw. „bewegte Quelle“ liegt!
Für em-Wellen:
c + vB
⎧
⎪⎪a) f Q ⋅ c
statt ⎨
c
⎪b) f Q ⋅
c − vQ
⎪⎩
⎫
⎪⎪
c+v
⎬ Ö d) f B = f Q ⋅ c − v
⎪
⎪⎭
v: Relativgeschwindigkeit Q-B
[Gl.4.2.76.]
Die Zeitdilatation ist vernachlässigbar, falls v << c . Für diesen Fall liefern alle 3 Formeln
das gleiche Ergebnis:
Für v << c bzw. β =
a) bewegte Quelle
b) bewegter Beobachter
d) em-Wellen,
relativistisch,
logitudinal
v
1
<< 1 ergibt sich mit
≈ 1+ β …
1− β
c
f B = f Q ⋅ (1 + β )
f B = fQ ⋅
f B = fQ ⋅
1
≈ f Q ⋅ (1 + β )
1− β
1+ β
≈ f Q ⋅ (1 + β ) ⋅ (1 + β ) = f Q ⋅ (1 + β )
1− β
Bei Reflexion an einem bewegten Objekt (siehe c) !) erhält man für β << 1 die doppelte
Frequenzverschiebung:
f B = fQ ⋅
1+ β
≈ f Q ⋅ (1 + β ) ⋅ (1 + β) ≈ f Q ⋅ (1 + 2β )
1− β
) Welche Näherungsformel erhält man beim transvesalen Dopplereffekt (Zeitdilatation)
für β << 1 ?
.....................................................................................................................................
Wo ist der (entscheidende) Unterschied zu obigen Formeln ?
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.37/67
Δf
in % (siehe Diagr. u. Datei „doppler.plt“)
f
(Für long. Dopplereffekt: Q. u. B. entfernen sich voneinander, also f B < f Q )
Bsp.: Doppler-Frequenzerniedrigung
f − fB
f
Δf
= 1− B
= Q
f
fQ
fQ
nichtrelativistisch , Q. bewegt
(nur longitudinal!)
1
Δf
= 1−
f
1+ β
relativistisch, longitudinal
1− β
Δf
= 1−
f
1+ β
Δf
= 1 − 1 − β2
f
relativistisch, transversal
v
c
Frequenzversch. durch Dopplereffekt
100
longitudinal
nicht relativ.
transversal
90
80
Delta_f / f in %
β=
,
70
60
50
40
30
20
10
0
0
0.1
0.2
0.3
0.4
0.5
v/c
0.6
0.7
0.8
0.9
1
Man erkennt:
Bei kleinen Geschwindigkeiten
v << c …
• spielt der transversale Dopplereffekt (Zeitdilatation) keine Rolle5
• ergeben realtivistische und nichtrelativistische Rechnung das gleiche Ergebnis für den
Δf v
≈
longitudinalen Dopplereffekt:
f
c
Bei großen Geschwindigkeiten …
• ergibt die nichtrelativistische Rechnung eine Frequenzverschiebung um maximal 50%
• bei Berücksichtigung der relativistischen Zeitdilatation kann die Frequenzverschiebung
dagegen bis zu 100% erreichen (Ö Freq. geht gegen Null!) .
5 Trotzdem begrenzen gerade diese Effekte derzeit die Genauigkeit von Atomuhren, da die
Atome dort nicht in Ruhe sind und auch nicht alle mit der gleichen Geschwindigkeit fliegen!
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.38/67
Ergänzung:
Die Formeln für den Doppler- Effekt lassen sich leicht ableiten, wenn man beachtet, daß „Q“
und „B“ den gleichen Vorgang in verschiedenen Bezugssystemen beschreiben. Die
Umrechnung zwischen diesen Systemen geschieht nichtrelativistisch mit Hilfe der GalileiTransformation, relativistisch mit Hilfe der Lorentz-Transf. (siehe dazu Kap. 2.1 und 2.4
!). Wir betrachten hier nur den nichtrelativistischen Fall der Galilei-Transformation:
x′ = x − vt (*)
bzw.
x = x′ + vt (**)
( t = t ′ !)
a) Bewegter Beobachter
Die von Q ausgesandte Welle ist im System S (Q ruht):
y = yˆ cos(kx − ωt )
(Ausbreitungsrichtung : +x !)
Mit (**) ergibt sich (System S’ bewegt sich mit vB in +x-Richtung von Q weg)
y = yˆ cos(k ( x′ + vB t ) − ωt ) ,
y = yˆ cos(kx′ − (ω − kvB )t )
Im System S’ des Beobachters wird die Welle beschrieben durch
y = yˆ cos(kx′ − ω′t )
ω′ = ω − kvB
Vergleich liefert
Ö
2πf ′ = 2πf −
2π
vB
λ
,
f′= f −
1
vB , f ′ =
λ
⎛ v
f ⎜⎜1 − B
⎝ λf
⎞
⎟⎟
⎠
⎛ v ⎞
Mit c = λf ergibt sich die Formel für den Doppler-Effekt: f ′ = f ⎜1 − B ⎟
c ⎠
⎝
[Gl.4.2.77.]
b) Bewegte Quelle
(Q bewegt sich in +x-Richtg. auf B zu!)
Im bew. System S’ ist y = yˆ cos(k ′x′ − ω′t )
y = yˆ cos(k ′(x − vQ t ) − ω′t ) , y = yˆ cos(k ′x − (ω′ + k ′vQ )t )
Mit (*) ergibt sich
Im ruhenden System S des Beobachters ist
y = yˆ cos(kx − ωt )
Vergleich liefert
ω = ω′ + k ′vQ
vQ ⎞
⎛
2π
1
⎟⎟
vQ , f = f ′ + vQ , f = f ′⎜⎜1 +
λ′
λ′
⎝ λ′f ′ ⎠
Die Welle bewegt sich im System S mit c. Das bewegte System S’ „fährt der Welle
hinterher“. Die Welle hat deshalb in S’ die geringere Geschwindigkeit c′ = c − vQ ! Mit
Ö
2πf = 2πf ′ +
c′ = λ′f ′ ergibt sich
⎛
⎛ c ⎞
v ⎞
⎟
f = f ′⎜1 + Q ⎟ = f ′⎜
⎜ c−v ⎟
⎜c−v ⎟
Q
Q
⎝
⎠
⎝
⎠
oder : f =
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
f′
v
1− Q
c
[Gl.4.2.78.]
S.39/67
4.2.6 Polarisation
Die „Störung“ y (x ,t ) , die sich als Welle ausbreitet, kann ein Skalar (Temp., Druck, …) oder
ein Vektor (Geschwindigkeit, E-Feld, …) sein. Bei Vektoren kommt es auf die Richtung an,
wir unterscheiden longitudinale u. transversale Wellen:
Longitudinale Welle (Längswelle)
(Schwingungsrichtung ⎥⎜ Ausbreitungsgeschw.)
Ausbreitungsrichtung
x
Bsp. :
Longitudinale
Welle auf
Pendelkette:
Pendel schwingen in x-Richtung, parallel zur Ausbreitungsrichtung der Welle
Wichtigstes Beispiel für longitudinale Wellen:
Schall Ù Elastische Längswellen in Gasen, Flüssigkeiten, Festkörpern
(In Gasen u. Flüssigkeiten gibt es nur elast. Längswellen, in Festkörpern auch Querwellen warum ?)
Transversale Welle (Querwelle)
(Schwingungsrichtung ⊥ Ausbreitungsgeschw.)
Ausbreitungsrichtung
x
Bsp. :
Transversale
Welle auf
Pendelkette:
y
Pendel schwingen in y-Richtung, quer zur Ausbreitungsrichtung der Welle
Wichtigstes Beispiel für transversale Wellen:
Elektromagnetische Welle, Licht! Bei em-Wellen wird zur Beschreibung der
Schwingungsrichtung normalerweise der E-Vektor verwendet. B steht senkrecht dazu, siehe
Kap. 4.2.1.3.
Die transversale Welle kann verschiedene Polarisationszustände haben:
¾ unploarisiert: Welle schwingt in keiner festen Richtung
zufällige, häufig wechselnde Schwingungsrichtung
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.40/67
¾ Lineare Polarisation: Welle (z.B. E-Vektor) schwingt in fester Richtung, senkrecht zur
Ausbreitungsrichtung der Welle. Bei linearer Polarisation bleibt der Schwingungsvektor in
einer Ebene.
Bsp. (Ausbreitungsrichtung ist x) : Der E-Vektor kann in der x-z-Ebene (a) , in der x-yEbene (b) (oder (c) in einer anderen, gegen die y-Achse gedrehten Ebene liegen)
a) transv. polarisiert in x-z-Ebene
von vorne
y
y
x
z
x
z
b) transv. polarisiert in x-y-Ebene
von vorne
y
y
x
z
x
z
c) lin. polarisiert, aber
Polarisationsebene gedreht:
y
Lineare Polarisation :
z
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.41/67
¾ zirkulare u. elliptische Polarisation :
Der E-Vektor kann sich aber auch drehen …
Ist dabei der Betrag konstant ergibt sich …
y
Zirkulare Polarisation :
z
(rechtszirkular oder linkszirkular plarisiere Welle)
Ist der Betrag nicht konstant ergibt sich …
y
Elliptische Polarisation:
z
Erzeugung
und Anwendung von linear, zirkular bzw. elliptisch polarisierten Wellen (spez. Licht!!!):
• Entweder „direkt“, d.h. bereits der Erreger der Welle schwingt entsprechend
oder
• aus unpol. Wellen durch entspr. Filter
y
Beispiel: Mech. Welle auf Seil
a) Linear polarisierte Welle:
Erreger (Seilanfang) bewegt sich
linear, erzeugt Auslenkung in einer
Ebene
z
x
Erreger schwingt linear
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.42/67
y
b) Zirkular polarisierte Welle
Erreger beschreibt Kreisbahn
Erreger bewegt sich kreisförmig,
Auslenkung des Seils liegt auf
Kreiszylinder
z
x
Die Polarisationsrichtung von elektromagnetischen Wellen (Radio, TV, …) wird durch die
Antennenorientierung definiert. Für den Empfang terrestischer TV-Sender werden
beispielsweise die Antennenstäbe für die meisten Sender (aber nicht für alle!) horizontal
ausgerichtet.
Polarisierte Wellen können aus unpolarisierten durch entsprechende Filter erzeugt werden.
Bsp. : Drahtrahmen als MikrowellenPolarisator
• In welche Richtung muß der E-Vektor
zeigen, damit eine em-Welle von einem
Gitter aus parallel gespannten Drähten
durchgelassen wird? Was passiert im
anderen Falle (Polarisationsrichtung um
90° gedreht) mit der Welle?
Lin.-Polfilter für Licht (Polfilter für Kameras, Sonnenbrillen, 3-d-Bilder …)
• Wie „funktioniert“ ein Polarisationsfilter aus Kunststoff?
Polarisationsfilter können als
• Polarisator (Erzeugung von pol. Licht aus unpolarisiertem Licht)
• Analysator (Nachweis der Polarisation)
oder als
verwendet werden.
Reflexion, Brechung, Streuung von Licht sind polarisationsabhängig. Unpolarisiertes Licht
wird durch diese Vorgänge (teilweise) polarisiert. Licht, das an der Oberfläche von opt.
durchlässigen Medien (Wasser, Glas, …) reflektiert wird, ist polarisiert (Polarisationsgrad ist
abh. vom Einfallswinkel). Durch Polarisationsfilter lassen sich also Lichtreflexe an Glas oder
Wasseroberflächen vermindern. Auch das Licht des Regenbogens und das Himmelsblau sind
stark polarisiert!
LCD- (Flüssigkristall-) Anzeigen und schnelle „Lichtschalter“ (Lichtmodulatoren) arbeiten
mit polarisiertem Licht. Sie verwenden Elemente, mit denen abhängig von einer
Steuerspannung die Polarisationsebene des Lichts gedreht werden kann.
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.43/67
Zirkulare Polarisation kann durch geeignete Überlagerung von 2 lin. polarisierten Wellen
erzeugt werden. Betrachten wir deshalb allg. die …
Überlagerung von 2 linear, senkrecht zueinander polarisierten Wellen gleicher
Ausbreitungsrichtung u. gleicher Frequenz:
y
a) gleiche Phase:
Welle1 ⎫
⎬ gleichzeitig (Min., Max., Null...)
Welle 2 ⎭
c
d
Schwingungsebene der resultierenden Welle ist fest.
→ linear polarisierte Welle
→ Richtung abhängig von Amplitude X u. Amplitude
Y
y
b) 90° Phasenverschiebung:
Ist Welle 2 (z-Richtung) gegenüber Welle 1 (yRichtung)
um
90°
phasenverschoben
( sin (ω ⋅ t ) → cos(ω ⋅ t ) ), so ergibt sich aus der
Überlagerung eine Kreisbewegung (beispielsweise)
des E-Vektors:
y
t=
c
t=0
Welle 2 :
⎛ 0 ⎞
⎜ sin (ω ⋅ t )⎟
⎜
⎟
⎝ 0 ⎠
0
⎞
⎛
⎟
⎜
0
⎜ cos(ω ⋅ t )⎟
⎠
⎝
t=
d
y
t=
Welle 1 :
T
4
T
2
3
⋅T
4
Ö sin-Schwingung in y
Ö cos-Schwingung in z
⎛
⎞
0
Überlagerung: ⎜ sin (ω ⋅ t ) ⎟ Ö Kreisbewegung in der y-z-Ebene
⎜
⎟
⎝ cos(ω ⋅ t )⎠
gleiche Amplitude , 90° Phasenverschiebung
Ö zirkulare Polarisation
Verschiedenen Amplituden der 2 linear polarisierten Wellen oder Δϕ ≠ 90° Ö Ellipse :
verschiedene Amplitude und/oder Δϕ ≠ 90 °:
)
Analog dazu läßt sich aber auch
jede linear polarisierte Welle als
Überlagerung einer
rechtszirkularen und einer
linkszirkularen Welle auffassen!
Ö elliptische Polarisation
d
c
linkszirkular
rechtszirkular
linear
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.44/67
Wie ist ein Zirkularpolarisationsfilter aufgebaut? Hier wird zunächt mit einem lin.-Polfilter
linear polarisiertes Licht erzeugt, dessen Polarisationsrichtung gegen die „y“-Achse um 45°
gedreht ist. Dies entspricht der Überlagerung zweier (phasengleicher !) Wellen in y- u. zRichtung. Wird nun eine dieser 2 Wellen um 90° phasenverschoben (¼ Wellenlänge!), dann
ergibt die Überlagerung rechts- oder linkszirkular polarisiertes Licht.
Die Phasenverschiebung erzeugt man mit (anisotropen) doppelbrechenden Materialien. Bei
diesen hängt der Brechungsindex und damit die Phasengeschwindigkeit von der
Polarisationsrichtung ab. Die Schichtdicke wird dabei so gewählt, daß zwischen den 2 Wellen
ein Gangunterschied von ¼ Wellenlänge entsteht (Viertelwellenplättchen oder λ/4-Plättchen).
Was passiert, wenn rechtszirkular polarisiertes Licht senkrecht auf eine Metallfläche trifft ?
...........................................................................................................................................
4.2.7 Interferenz
Überlagerung von 2 Wellen mit
• gleicher Wellenlänge / Frequenz
• gleicher Ausbreitungsrichtung
• gleicher Amplitude
• (gleicher Polarisation)
am gleichen Ort.
aber: verschiedener Phase
y1 = yˆ ⋅ e j (k ⋅ x −ω⋅t )
y2 = yˆ ⋅ e j (k ⋅ x −ω⋅t −ϕ )
Die Phasenverschiebung ϕ der Welle 2 entspricht einem Gangunterschied Δ:
ϕ
⎛ ϕ⎞
Δ = ⎜ ⎟⋅λ
[Gl.4.2.79.]
y2 = yˆ ⋅ e j (k ⋅( x − Δ )−ω⋅t )
mit
Δ=
k
⎝ 2π ⎠
2π
ϕ = Δ⋅k
ϕ = Δ⋅
λ
Bsp.: 2 Wellen kommen von verschiedenen Quellen (Lautsprecher, Antennen…), Abstand Δ
Δ
Quelle 1
Quelle 2
x
Weitere Möglichkeiten, einen Gangunterschied bzw. eine Phasenverschiebung zu erzeugen:
• Mehrere Quellen (Sendeantennen, Lautsprecher, …) , die dicht beieinander liegen, aber
phasenverschoben angesteuert werden.
• Wellen kommen von einer Quelle, durchlaufen aber verschiedene Wege und werden später
zusammengeleitet.
• Die zwei Wellen laufen mit verschiedener Phasengeschwindigkeit, z.B. bei Licht durch
Medien mit unterschiedlicher Brechzahl n („optischer Weg“ ist verschieden!).
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.45/67
Durch Überlagerung der zwei Wellen ergibt sich je nach Phasenunterschied
konstruktive Interferenz Wellenberg auf Wellen verstärken sich
Wellenberg
destruktive Interferenz
Wellental auf
Wellenberg
Wellen löschen sich
aus
Δ = 0, λ , 2λK
Δ = m⋅λ
Δ = 21 λ , 23 λ , 25 λK
λ
Δ = ( 2m + 1) ⋅
2
(bei gleicher
Amplitude vollständig)
…oder ein Zwischenwert.
Rechnerisch:
y1 = y$ ⋅ e j ( k ⋅ x −ω⋅t )
y2 = y$ ⋅ e j ( k ⋅x − ω⋅t − k ⋅Δ )
Überlagerung:
y = y1 + y2 = yˆ ⋅ {e j (k ⋅x −ω⋅t ) + e j (k ⋅ x −ω⋅t − k ⋅Δ ) }
Fügt man im im Exponenten des ersten Summanden −
k ⋅Δ k ⋅Δ
(= 0) ein und zerlegt im
+
2
2
k ⋅Δ k ⋅Δ
+
so ergibt sich …
2
2
⎧⎪ j ⎛⎜ k ⋅x −ω⋅t − k2⋅Δ + k2⋅Δ ⎞⎟ j ⎛⎜ k ⋅ x −ω⋅t − k2⋅Δ − k2⋅Δ ⎞⎟ ⎫⎪
⎠
⎠
+e ⎝
y = yˆ ⋅ ⎨e ⎝
⎬
⎪⎩
⎪⎭
zweiten Summanden k ⋅ Δ gemäß k ⋅ Δ =
y = yˆ ⋅ e
k ⋅Δ ⎞
⎛
j ⎜ k ⋅ x − ω⋅t −
⎟
2 ⎠
⎝
⎧ + j k2⋅Δ − j k2⋅Δ ⎫
+e
⎨e
⎬
⎩1442443⎭
⎛ k ⋅Δ ⎞
= 2 cos ⎜
⎟
⎝ 2 ⎠
Die erste exp-Funktion ist eine harm. Welle, deren Phasenlage (bzw. Gangunterschied) gerade
zwischen Welle 1 und Welle 2 liegt. Der 2. Term {…} hängt weder von x noch von t ab. Er
beeinflußt lediglich die Amplitude der resultierenden Welle:
k ⋅Δ ⎞
⎛
j ⎜ k ⋅ x − ω⋅t −
⎟
2 ⎠
⎝
y ( x, t ) = 2 ⋅ yˆ ⋅ cos(k ⋅ Δ / 2) ⋅ e
1442443 14243
Amplitude,
abh. von Δ
harm. Welle,
Gangunterschied Δ/2
Durch Veränderung des Gangunterschieds Δ hann die Amplitude der resultierenden Welle
beeinflußt werden. Min./Max. der Amplitude erhält man (wie oben …)
2 ⋅ yˆ ⋅ cos(k ⋅ Δ / 2 ) = 0
• Amplitude = 0 ⇒
k ⋅Δ
π
= (2 ⋅ m + 1) ⋅
2
2
m = 0,1,2,...
π
π⋅λ
= (2 ⋅ m + 1) ⋅
k
2⋅π
λ
Δ = (2 ⋅ m + 1) ⋅
m = 0,1,2,...
2
Δ = (2 ⋅ m + 1) ⋅
Destruktive Interferenz:
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
[Gl.4.2.80.]
S.46/67
• Ampl.-Maximum ⇒
cos(k ⋅ Δ / 2 ) = 1
k ⋅Δ
= m⋅π
2
Δ = m⋅
Konstruktive Interferenz
m = 0,1,2,...
2π
= m⋅λ
k
Δ = m⋅λ
m = 0,1,2,...
[Gl.4.2.81.]
Weil bereits durch Veränderung des Gangunterschieds von nur ½ Wellenlänge (bei Licht
genügen also ca. 200 nm!) aus einem Minimum ein Maximum wird, kann Interferenz als sehr
genaue Meßmethode angewandt werden.
Von den zahlreichen Interferometer-Bauformen soll hier exemplarisch das MichelsonInterferometer skizziert werden.
Mit dem Michelson-Interferometer kann die Verschiebung des Spiegels S1 sehr genau
gemessen weden.
Bringt man in einen
Arm des Interferometers
noch eine Zelle ein (die
mit einem Gas gefüllt
oder evakuiert werden
kann), so ändert sich
auch
dadurch
der
optische Weg. Auf diese
Weise kann z.B. die
Brechzahl von Luft bestimmt
werden
(n = 1,000 29…).
S2 (fest)
Lichtquelle
(z.B.
Laser)
n1=1
d
Zelle,
mit Gas (n>1) Δ = 2d
gefüllt
halbdurchl. Spiegel
D
Detektor (Photozelle / Schirm, Auge)
Gilt auch bei Interferenz der Energieerhaltungssatz ?
)
S1 (verschiebbar)
ja
nein
Ein (Michelson-) Interferometer sei so justiert, daß am Ausgang (Detektor D)
destruktive Interferenz auftritt. Der Laser (Leistung P) strahlt aber am Eingang laufend
Energie in das Gerät ein.
Wo bleibt diese Energie ?
.........................................................................................................................................
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.47/67
4.2.8 Überlagerung von Wellen unterschiedlicher Frequenz
4.2.8.1 Zwei versch. Frequenzen
x
Schwebung
Bekannt (hoffentlich!) aus Kap. 4.1.4 :
t
Die Überlagerung von 2 Schwingungen mit versch. Kreisfrequenz ω1 , ω2 ergibt eine
Schwebung, d.h. eine Schwingung, deren Amplitude als Funktion der Zeit periodisch zu- und
abnimmt. Die Schwebungsfrequenz ergab sich gerade als Differenz der 2 Frequenzen.
Ganz ähnliche Verhältnisse ergeben sich, wenn zwei harmonische Wellen mit
unterschiedlicher Frequenz überlagert werden. Jetzt muß aber die Abhängigkeit von t und x
beachtet werden, da nicht nur die Frequenz sondern auch die Wellenlänge der zwei Wellen
vierschieden sind.
Überlagerung von 2 Wellen:
y1 = yˆ ⋅ e j (k1 ⋅ x −ω1 ⋅t )
y2 = yˆ ⋅ e j (k 2 ⋅x −ω2 ⋅t )
Mit den Abkürzungen
k +k
k= 1 2 ,
2
ω + ω2
ω= 1
,
2
k1 − k 2
,
2
ω − ω2
Δω = 1
,
2
Δk =
k1, 2 = k ± Δk
[Gl.4.2.82.]
ω1, 2 = ω ± Δω
[Gl.4.2.82.]
läßt sich die Überlagerung schreiben als …
y ( x, t ) = y1 ( x, t ) + y2 ( x, t )
y ( x, t ) = yˆ ⋅ {e j [(k ⋅ x −ω⋅t )+ (Δk ⋅ x − Δω⋅t )] + e j [(k ⋅x −ω⋅t )−(Δk ⋅x − Δω⋅t )]}
y ( x, t ) = yˆ ⋅ {e + j⋅(Δk ⋅x − Δω⋅t ) + e − j⋅(Δk ⋅ x − Δω⋅t ) }⋅ e j⋅(k ⋅x −ω⋅t )
14444244443
= 2⋅cos ( Δk ⋅ x − Δω⋅t )
y ( x, t ) = 2 ⋅ yˆ ⋅ cos(Δk ⋅ x − Δω ⋅ t ) ⋅e j⋅(k ⋅ x −ω⋅t )
[Gl.4.2.83.]
Ähnlich wie bei der Schwebung y
betrachten wir speziell den Fall, bei dem
sich Kreisfrequenz ω und Wellenzahl k
der 2 Wellen nur „wenig“ unterscheiden:
Δω << ω, Δk << k
•
t
j ⋅( k ⋅ x − ω⋅t )
Der Ausdruck e
ist eine Welle mit dem (mittleren) ω u. k , die sich in xRichtung ausbreitet.
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.48/67
c
•
Die Phasengeschwindigkeit dieser Welle ist c =
•
Die Amplitude dieser Welle ist
moduliert mit dem Faktor
cos(Δk ⋅ x − Δω ⋅ t )
•
Die Welle besteht also aus einzelnen
Wellengruppen, die sich ebenfalls in xRichtung bewegen
ω ω1 + ω2
=
k
k1 + k 2
Wellengruppen
[Gl.4.2.84.]
Einhüllende d.
Welle
4.2.8.2 Gruppen- und Phasengeschwindigkeit
Wir betrachten weiter die Überlagerung von 2 harmonischen Wellen mit unterschiedlicher
Wellenlänge. Dabei bilden sich Wellengruppen aus, die durch den Faktor cos(Δk ⋅ x − Δω ⋅ t )
beschrieben werden. Die Geschwindigkeit, mit der sich diese Einhüllende der Wellengruppe
fortbewegt, ist die Gruppengeschwindigkeit cgr :
Aus y ∼ cos(Δk ⋅ x − Δω ⋅ t ) ergibt sich für irgendeinen Punkt auf der Einhüllenden (z.B. für ein
Maximum): Δk ⋅ x − Δω ⋅ t = const.
d x Δω ω1 − ω2
=
c gr =
=
[Gl.4.2.85.]
d t Δk
k1 − k 2
Was ergibt sich, wenn 2, 3, 4, …, „viele“ Wellen überlagert werden ? Auf die ausführliche
Rechnung wird hier verzichtet. Einige Beispiele zeigen, welche Wellenformen man erhält,
wenn mehrere Wellen mit etwas verschiedenen Wellenlängen überlagert werden:
2 Wellen überlagert …
(gleiche Amplitude)
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
sin(9.5*x)+sin(10.5*x)
S.49/67
3 Wellen überlagert …
(gleiche Amplitude)
5 Wellen überlagert …
(gleiche Amplitude)
sin(9.5*x)+sin(10.*x)+sin(10.5*x)
sin(9.*x)+sin(9.5*x)+sin(10.*x)+sin(10.5*x)+sin(11.*x)
Wellenpaket, Überlagerung
aus 51 versch. harmonischen
Wellen,
deren Amplitude mit
wachsendem Abstand von der
mittleren Frequenz immer
kleiner wird (~
Gaußfunktion)
Mit 2 Wellen ehält man eine „Perlenschnur“, die einezelnen Wellenpakete sind alle gleich groß unf folgen ohne
Abstand aufeinander. Werden mehr und mehr Wellen überlagert, so erhält eine Wellengruppe eine besonders
große Amplitude. Dazwischen liegen mehrere kleinere Pakete. Mit entsprechend vielen Einzelwellen kann man
erreichen, daß vor und hinter dem „großen“ Paket fast nichts übrigbleibt.
Beachten Sie aber: Alle dargestellten Funktionen sind periodisch. Mit einer endlichen Anzahl von Wellen erhält
man immer eine Folge von periodisch auftretenden Paketen. Streng genommen erhält man erst mit unendlich
vielen verschiedenen Wellenlängen ein einzelnes Wellenpaket!
Aus der Summe von 2, 3, … Wellen mit verschiedenen Wellenzahlen k wird schließlich ein
Integral über k:
j ⋅( k ⋅ x − ω( k )⋅t )
dk
„Fourier-Synthese“
.⇒
∫ ... e
Für jede Wellenart gibt es eine Beziehung zwischen (Kreis-) Frequenz und Wellenlänge bzw.
ω = ω(k ) .
Wellenzahl k = 2π λ :
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.50/67
Δω
dω
Ö c gr =
Δk
dk
[Gl.4.2.86.]
Geschwindigkeit, mit der sich ein Punkt mit fester
Phase (z.B. Nulldurchgang) bewegt
Für die Gruppengeschwindigkeit erhält man dann anstatt c gr =
Phasengeschwindigkeit
Gruppengeschwindigkeit
c=
ω
k
Geschwindigkeit einer Wellengruppe, eines
d ω Wellenpakets,
c gr =
d k Geschwindigkeit, mit der ein aufmoduliertes Signal
übertragen wird
Ob die Gruppengeschwindigkeit kleiner, gleich groß oder größer als die Phasengeschwindigkeit ist, hängt von der Wellenart (und vom Medium), d.h. von der Beziehung
ω = ω(k ) ab.
n
ω proportional zu k :
ω∼k
ω = c⋅k ,
ω
k
( c ist konstant, d.h.unabhängig von ω und k !)
mit der Phasengeschwindigkeit c =
Wenn c konstant ist, dann ist auch die Gruppengeschwindigkeit = c :
c gr =
dω
=c !
dk
n Wenn ω proportional zu k ist …
Gruppengeschwindigkeit cgr = Phasengeschwindigkeit c
beide sind konstant!
o
Zwischen ω und k besteht ein nichtlinearer Zusammenhang : ω = c(k ) ⋅ k
Phasengeschwindigkeit ist dann nicht konstant, sondern hängt von k (bzw. von λ) ab
ω(k )
c = c(k ) =
k
dω
und ω = c(k ) ⋅ k erhält man für die Gruppengeschwindigkeit
Mit c gr =
dk
dω
c gr =
dk
dc
= c ⋅1 + k ⋅
dk
dc dλ
2π
dλ
2π
=c+k⋅
⋅
, mit λ =
⇒
=− 2
dλ dk
dk
k
k
d c − 2π
=c+
⋅
dλ k
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.51/67
Somit kann, wenn c als Funktion der Wellenlänge bekannt ist, die Gruppendc
geschwindigkeit berechnet werden: c gr = c − λ ⋅
[Gl.4.2.87.]
dλ
Alternativ läßt sich cgr berechnen, wenn c als Funktion der Frequenz gegeben ist:
dω
1
dk
ω
bzw.
, k=
=
c gr =
dk
c gr d ω
c
c
c gr =
[Gl.4.2.88.]
ω dc
1 1 ω dc
1− ⋅
= − ⋅
c dω
c gr c c 2 d ω
o Wenn ω nicht proportional zu k ist,
sind Gruppen- u. Phasengeschw. verschieden
und hängen von der Wellenlänge bzw. Frequenz ab!
Gruppengeschwindigkeit cgr ≠ Phasengeschwindigkeit c
c gr =
dω
dk
( bzw. c gr = c − λ ⋅
c
dc
oder c gr =
)
ω dc
dλ
1− ⋅
c dω
4.2.8.3 Dispersion
Phasengeschwindigkeit c frequenzabhängig Ù Dispersion
(in diesem Fall ist c gr ≠ c !)
Dispersion führt dazu, daß Licht bei der Brechung (Kap. 4.2.9.3) je nach Wellenlänge
verschieden stark abgelenkt wird („Brechungsdispersion“). „Laufzeitdispersion“ bewirkt, daß
Signale, die man einer Welle aufmoduliert hat, ihre Form verändern, da die einzelnen
Komponenten unterschiedliche Geschwindigkeit haben (z.B. elektr. Signalübertragung über
reale Leitungen oder optische Signalübertragung über Glasfaserkabel).
Einteilung:
„normale Dispersion“
dc
>0
c gr < c
dλ
„anomale Dispersion“
dc
<0
c gr > c
dλ
keine Dispersion
dc
=0
c gr = c
dλ
c
Optik: Brechungsindex n = 0
[Gl.4.2.89.]
c
(c : Phasengeschw. im Medium, c0 : im Vakuum)
Einige Beispiele für „norm. Disp.“ im sichtbaren Bereich
dc
dn
(beachte:
> 0⇔
< 0 !) Î
dλ
dλ
Bsp. Quarzglas
c=
c0
n(λ )
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.52/67
c0
c0
nm
, λ 2 = 900
c2 =
1
2
3
1,4534
1,4518
in Luft!
in Luft!
) Berechnen Sie für Licht der (mittleren) Wellenlänge 850 nm die Gruppen- und die
Phasengeschwindigkeit!
λ1 = 800
12nm
3
c1 =
Abhängigkeit der Brechzahl bzw. der
Phasengeschw. von der Frequenz bei
Kochsalz
Was ist die Ursache der Dispersion von Licht in Materie? Warum ist die
Phasengeschwindigkeit von Licht in Glas, Wasser, NaCl etc. überhaupt verschieden von der
Vakuumlichtgeschwindigkeit und warum hängt dieser Unterschied von der Frequenz ab ?
Eine elektromagnetische Welle, die in Materie eindringt, regt dort die elektrischen Ladungen
(Elektronen, Atomkerne) zu erzwungenen Schwingungen an. Dabei gibt es eine
(frequenzabhängige !!! ) Phasenverschiebung zwischen Erregerkraft und Bewegung der
Ladungen (siehe Kap. 4.1.3 !). Die schwingenden Ladungen senden aber ihrerseits wieder
elektromagnetische Wellen aus. Diese sind gegenüber der ursprünglichen Welle phasenverschoben und addieren sich mit der ursprünglichen Welle zu einer resultierenden, ebenfalls
phasenverschobenen Welle auf. Diese Phasenverschiebung nimmt proportional zur durchlaufenen Schichtdicke zu. Infolgedessen erscheint der ganze (recht komplexe) Ablauf so, als
ob die resultierende Welle im Medium eine andere Geschwindigkeit als im Vakuum hätte.
Besonders stark ändert sich c und n in der Nähe von Resonanzstellen. Allerdings tritt gerade
dort auch starke Dämpfung auf!
4.2.9 Wellenausbreitung in 2 und 3 Dimensionen
Bisher:
1-dimensionale Wellenausbreitung
a)
Seil, Kabel etc. : Ausbreitungsmedium ist 1-dim. !
b)
Schall, em-Wellen, Oberflächenwellen in Wasser
… breiten sich im Raum (2-dim.) bzw. in einer Ebene (Wasseroberfl., 2-dim.) aus
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.53/67
aber: 1-dim. Betrachtung genügt(e) zur
Beschreibung ebener Wellen
(Wellenfront ist Ebene / Gerade)
Schallwechseldruck, E-Feld, ...
c
c
x
Ausbreitung geradlinig
z
WELLENFRONT
• x-Richtung (Bsp. Schalldruck)
p( x, t ) = pˆ ⋅ e j (k ⋅ x −ω⋅t )(+ p0 )
• beliebige Richtung r
(Wellenzahlvektor k )
rr
p( x, y, z , t ) = pˆ ⋅ e j (k ⋅r −ω⋅t )(+ p0 )
c
Ebene Welle :
x
Wie kommt es zur Ausbreitung der eindimensionalen bzw. ebenen Welle ?
1-dim. Fall (siehe Bsp. „Pendelkette“, Kap. 4.2.1):
Welle erreicht einen best. Punkt (ein Pendel), versetzt diesen in Schwingung
•
•
Von diesem Punkt geht eine neue Welle aus (durch Kopplung wird Nachbar in
Schwingung versetzt)
Jeder schwingende „Punkt“ gibt Schwingung an „Nachbarn“ weiter Ö Wellenausbreitung (*)
Eine beliebige Welle, die sich im 3-dim. Raum ausbreitet, ergibt sich (im Prinzip) als
Lösung der 3-dimensionalen d’Alembertschen Wellengleichung:
⎛ ∂2 p ∂2 p ∂2 p ⎞ 1 ∂2 p
⎜⎜ 2 + 2 + 2 ⎟⎟ − 2 2 = 0 . Diese Gl. hat (abhängig von
∂y
∂z ⎠ c ∂t
⎝ ∂x
den Randbedingungen) außer den ebenen Wellen noch viele
anderen Lösungen. Zum Beispiel gibt es im 2-dim. Fall
kreisförmige Wellen (Wasseroberfläche!), im 3-dim. Fall
Kugelwellen. Bei diesen Wellenformen bleibt im Gegensatz zur
ebenen Welle auch ohne Dämpfung die Amplitude nicht
konstant, sondern nimmt ab, wenn sich die Welle ausbreitet und
dadurch die „Fläche“ vergrößert wird (Energieerhaltung!). Eine
1
Kugelwelle läßt sch darstellen als ∼ ⋅ f (k ⋅ (r − ct )) , dabei ist
r
f (K) eine beliebige Funktion. Speziell interessieren auch hier
1
wieder die harmonischen Funktionen (⇒ ∼ ⋅ e j (k ⋅(r −ct )) ). Die Kugelwelle breitet sich
r
gleichmäßig (isotrop) in alle Richtungen aus, die Amplitude hängt nur vom Abstand vom
Zentrum (Radius r), nicht aber von der Richtung ab.
Mit etwas Mathematik läßt sich zeigen, daß die Kugelwellen tatsächlich Lösungen der 3-dim. Wellengleichung
sind (Anleitung: Polarkoordinaten verwenden, Laplace-Operator in Polarkoordinaten aus Formelsammlung!
Beachten, daß Ableitungen nach den Winkeln Null ergeben, da Kugelwelle nicht von Richtung abhängt!)
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.54/67
4.2.9.1 Huygens-Fresnelsches Prinzip
Nach Christian Huygens (1629 - 1695) und Jean Augustin Fresnel (1788 - 1827) kann die
Ausbreitung einer Welle im Raum bestimmt werden, indem man die oben für den
eindimensionalen Fall aufgestellte Regel (*) auf den 3-dim. Raum erweitert und beachtet, daß
jeder schwingende Punkt im Raum eine neue Kugelwelle („Elementarwelle“) aussendet:
Huygens-Fresnelsches Prinzip:
• Von jedem Punkt des Mediums, der von der Welle erfaßt wird,
geht eine Elementarwelle aus.
• Die weiterlaufende Welle ist die Resultierende aller Elementarwellen!
Natürlich gilt dies auch für die ebene Welle!
Alle Punkte einer Wellenfläche schwingen mit …
• gleicher Frequenz (Erregerfrequenz)
• gleicher Phase
und senden deshalb phasengleich Elementarwellen
aus. Die Einhüllende dieser Elementarwellen ergibt
die neue – ebene – Wellenfront.
Wichtig: Dies funktioniert nur, wenn die Wellenfront
unendlich breit ist! Bei einer Welle mit
endlicher Breite gibt es Randeffekte, da die
seitlich herauslaufenden Elementarwellen
nicht durch entsprechende Nachbarn
kompensiert werden (siehe auch Kap,
4.2.9.4) !
Damit eine Wellenfront „breit genug“ ist, um von
einer sich geradlinig ausbreitenden ebenen Welle zu
sprechen, muß die Breite b sehr groß gegenüber der
Wellenlänge λ sein. Die gesamte g e o m e t r i s c h e alte
O p t i k arbeitet mit dieser Näherung der sich Wellenfront
geradlinig ausbreitenden Lichtstrahlen.
neue
Wellenfront
Bsp.: Wie groß ist b/λ für einen „typischen“ Laserstrahl? b = ....... , λ = ....... , b/λ = .......
Ausbreitung der ebenen Welle nach Huygens-Fresnel:
Aus ebener Wellenfront entsteht wieder eine ebene Wellenfront !
⇒
geradlinige Ausbreitung der Welle!
Analog kann auch die Ausbreitung einer Kugelwelle durch Überlagerung von
Elementarwellen beschrieben werden.
Erreicht die Welle eine reflektierende Grenzfläche, eine Grenze zwischen zwei Medien oder
ein Hindernis, so ergibt sich mit Huygens-Fresnel in einfacher Weise Reflexion, Brechung
und Beugung (Kap.4.2.9.2.4).
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.55/67
Eine direkte Anwendung des Huygens-Fresnelschen Prinzips ergibt sich in der
Ultraschalltechnik. Hier kann man mit einer Reihe zeitversetzt angesteuerter kleiner
Schallgeber („Phased-Array“), die jeder eine Elementarwelle aussenden, die Form der
Wellenfront in weiten Grenzen beeinflussen:
a)
Ebene
Wellenfront
wird unter
Winkel ϕ
abgestrahlt
Impulse zum
Zeitpunkt t0
Array
1
2
3
4
5
6
7
8
9
(Lineare
Zeitverzögerung
der einzelnen
Schallgeber)
Effektive
Apertur A’
Schallrichtung
φ
...
n
t 0 − τ1
b)
Schallfeld wird
auf Punkt F
fokussiert
(„Parabelförmige“
Zeitverzögerung
der einzelnen
Schallgeber)
I
I
I
I
I
I
I
I
I
I
t0 − τ n
W
1
2
3
4
5
6
Wellenfront
t
H1
2
3
4
5
6
7
Wellenfront
F
n
n
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.56/67
4.2.9.2 Reflexion
Aus dem Huygens-Fresnelschen Prinzip ergibt sich auch das Reflexionsgesetz. Trifft eine
6
1
2
einlaufende
Welle
auslaufende Welle
ebene Welle unter dem
Winkel α auf einen
(ebenen) Reflektor, so
überlagern sich die von
der
Oberfläche
des
Reflektors ausgehenden
Elementarwellen zu einer
ebenen Welle, die unter
dem Winkel β abgestrahlt
wird.
einl. Welle
5
4
3
ausl. Welle
1
3
ausl. Welle
D
3
2
2
einl. Welle
C
α β
λ
α
1
β
A
B
Nach Huygens-Fresnel gilt (s. Skizze, Dreieck ABC und ABD!) :
α=β
Wie die Skizze zeigt, schneiden sich die von der
Lichtquelle L ausgehenden „Strahlen“ nach der
Reflexion am Spiegel nicht mehr. Werden die Strahlen
aber nach „hinten“ verlängert, erkennt man, daß sie
vom Punkt L´ zu kommen scheinen. Das Bild L´ ist
nicht wirklich vorhanden; L´ ist ein virtuelles Bild der
Lichtquelle L. L´ liegt in Bezug auf die Spiegelebene
„spiegelsymmetrisch“ zu L.
Ebener Spiegel
L’
[Gl.4.2.90.]
L
Auge
Der
F
Parabolspiegel
vereinigt achsenparallele Strahlen im Brennpunkt
F
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.57/67
4.2.9.3 Brechung
Trifft eine ebenen Welle schräg auf eine Grenzfläche zwischen zwei Medien mit
unterschiedlicher Phasengeschwindigkeit c1 , c2, so überlagern sich die von der Grenzfläche
ausgehenden Elementarwellen (ähnlich wie bei der Reflexion) wieder zu einer ebenen Welle.
Wegen der veränderten Geschwindigkeit ist auch die Wellenlänge in den 2 Medien
verschieden. Infolgedessen breitet sich die Welle im 2. Medium unter einem anderen Winkel
aus, sie wird „gebrochen“.
c1
λ1 =
λ1
c1
f
λ1
λ
sin α = 1
a
sin β =
α
λ2
a
a
a
λ2
λ2
λ2
c
λ2 = 2
f
Aus der Skizze ergibt sich …
λ1
α a
β
β
c2
sin α λ1 c1
=
=
sin β λ 2 c2
Z.B. ist hier c2 < c1 , also auch λ 2 < λ1 und β < α , d.h. die Welle wird beim Übergang in ein
Medium mit kleinerer Geschwindigkeit zum Lot hin gebrochen!
Das Brechungsgesetz
sin α c1
=
sin β c2
[Gl.4.2.91.]
gilt nicht nur für sichtbares Licht, sondern auch für Mikrowellen, Schall, Ultraschall etc. !
In der Optik ergibt sich die Geschwindigkeit c aus dem Brechungsindex n. Damit erhält man:
c
c
sin α c0 n2 n2
=
=
c1 = 0 ,c2 = 0 ,
sin β n1c0 n1
n2
n1
sin α n2
(Snelliussches Brechungsgesetz)
=
sin β n1
[Gl.4.2.92.]
Beachten Sie, dass c bzw. n häufig von der Frequenz abhängen. Infolgedessen wird z.B. Licht
von unterschiedlicher Farbe verschieden stark gebrochen (→ Dispersion, Kap. 4.2.8).
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.58/67
Trift Licht (oder eine andere Welle) auf eine Grenze zu einem (optisch) dünneren Medium, so
wird der Strahl vom Lot weg gebrochen:
n
sin β = sin α ⋅ 1 .
n2
Wegen n2 < n1 ist jetzt β > α . β kann aber maximal 90° erreichen ( sin β ≤ 1 ). Licht tritt dann
streifend zur Grenzfläche aus. Für noch größere Einfallswinkel α ist keine Brechung mehr
möglich.
n
sin α > 2 Ö Totalreflexion
[Gl.4.2.93.]
n1
D.h. Licht wird dann an der Grenzfläche vollständig reflektiert!
Anwendungen des Brechungsgesetzes: Linsen, Prismen, eine Vielzahl von opt. Geräten (auf
die hier nicht eingegangen werden kann). Einige Beispiele…
Lichtwellenleiter
Brechung an einem Prisma
nK
nM
n1 = 1
rK
rM
n
n2 > 1
Sammellinse
Refraktometer
Most n1
βG
F
dunkel
Glas n2
hell
f
Brechung und Reflexion
Wie im 1-dim. Fall (bzw. bei senkrechtem Einfall, α = 0°, siehe Kap. 4.2.3.2) wird auch bei
schrägem Einfall ein Teil der Welle reflektiert und ein Teil duchgelassen (gebrochen). Der
Anteil der reflektierten/gebrochenen Welle ergibt sich auch bei schrägem Einfall wieder aus
Energieerhaltung und Stetigkeitsbedingungen.
a) Licht - Fresnelsche Formeln
r
Beim Durchgang von Licht (em-Welle) durch Grenzflächen muss die Komponente des E Vektors parallel zur Oberfläche stetig sein. Da diese von der Polarisation (parallel oder
senkrecht
zur
Einfallsebene)
abhängt,
werden
die
Reflexionskoeffizienten
polarisationsabhängig! Auch bei schrägem Einfall ist der Wellenwiderstand Z der beiden
Materialien wieder wichtig für den Anteil der reflektierten bzw. durchgelassenen Energie. Für
Materialien mit μ r = 1 ist aber Z ~ 1 n (siehe dazu auch Seite 19). Damit hat die Brechzahl n
hier doppelte Bedeutung: n beschreibt einerseits die unterschiedliche Geschwindigkeit der
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.59/67
Wellen in den beiden Medien (daraus ergibt sich bei gegebenem Einfallswinkel α der
Brechungswinkel β - große Unterschiede in n bedeuten starke Brechung). Andererseits ist an
n der Wellenwiderstand gekoppelt und damit wird der Reflexionsgrad beeinflusst (große
Unterschiede in n bedeuten starke Reflexion).
Nach etwas Rechnung (die hier übersprungen wird) ergeben sich die „Fresnelschen Formeln“:
⊥ Ö Polarisation senkrecht zur Einfallsebene ⏐⏐ Ö Polarisation parallel zur Einfallsebene
E-Feld schwingt
in der zur Einfallsebene
E-Feld schwingt senkrecht
zur Einfallsebene
(parallel zur Oberfläche!)
α
α
β
Reflexionskoeffizient für die Amplitude: r =
n1 cos α − n2 cos β
n1 cos α + n2 cos β
sin (α − β )
r⊥ = −
sin (α + β )
r⊥ =
β
Er
Ee
(Ö… für die Intensität: R = r 2 !)
n2 cos α − n1 cos β
n2 cos α + n1 cos β
tan (α − β )
r|| = −
(6 )
tan (α + β)
r|| = −
Dabei kann jeweils der Winkel β aus α mit Hilfe des Brechungsgesetzes
[Gl.4.2.94.]
sin α n2
=
berechnet
sin β n1
werden..
Die zweite, kompaktere Form der Gleichungen (mit (α ± β) ) erhält man jeweils, wenn man in
der ersten Form n2 n1 durch sin α sin β ersetzt und dann noch einige trigonometrische
Umformungen durchführt. Diese Form ist aber für senkrechten Einfall ( α = 0 , β = 0 ) nicht
mehr verwendbar.
Bsp.1: Luft (n1 = 1 ) → Glas (n2 = 1.5 ) (Vorzeichenwechsel bei senkrechtem Einfall!)
•
•
•
Bei senkrechtem Einfall (α = 0°) sind die 2 Pol.-Richtungen identisch; es werden
2
R = (− 0.2 ) = 4% der Intensität reflektiert. Es ist r < 0 (Refl. am dichteren Medium)!
Für streifenden Einfall (α → 90°) geht der Refl.-Koeff. R gegen 100 % !
Beim „Brewster-Winkel“ αB = 56.3° ( tan α B = n2 n1 ) hat die Kurve r| (α ) einen
Nulldurchgang! Parallel zur Einfallsebene polarisiertes Licht wird unter diesem Winkel
nicht reflektiert! Von unpolarisiertem Licht wird nur die senkrecht zur Einfallsebene
polarisierte Komponente reflektiert!
) Welcher
Winkel liegt in diesem Fall zwischen reflektiertem und gebrochenem
Strahl?
......................................
6 Achtung: Es gibt in der Literatur verschiedene Vorzeichenkonventionen. Hier wird r so definiert, dass ein
negativer Wert einen Phasensprung bei der Reflexion bedeutet und sich bei senkrechtem Einfall für beide
Polarisationsrichtungen das gleiche Vorzeichen ergibt!
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.60/67
R e fl . K o e ff. r
F re s n e ls c h e F o rm e ln , L u ft -> G la s
1
0 .9
0 .8
0 .7
0 .6
0 .5
0 .4
0 .3
0 .2
0 .1
0
-0 .1
-0 .2
-0 .3
-0 .4
-0 .5
-0 .6
-0 .7
-0 .8
-0 .9
-1
P o la ri s a ti o n p a ra lle l
zu r E i n fa lls e b e n e
r_ p a r( a lp h a )
r_ s e n k r( a lp h a )
B re w s te r-W i n k e l
P o la ri s a ti o n s e n k re c h t
zu r E i n fa lls e b e n e
0
10
20
30
40
50
60
70
80
90
E i n fa lls w i n k e l a lp h a
Bsp.2: Glas (n2 = 1.5 ) → Luft (n1 = 1 ) (kein Vorzeichenwechsel bei senkrechtem Einfall!
Totalreflexion für α > 41,8° )
R e fl . K o e ff. r
F re s n e ls c h e F o rm e ln ,
1
0 .9
0 .8
0 .7
0 .6
0 .5
0 .4
0 .3
0 .2
0 .1
0
-0 .1
-0 .2
-0 .3
-0 .4
-0 .5
-0 .6
-0 .7
-0 .8
-0 .9
-1
G la s -> L u ft
r_ p a r( a lp h a )
r_ s e n k r( a lp h a )
P o la ri s a ti o n s e n k re c h t
zu r E i n fa lls e b e n e
T o ta lre fle xi o n
B re w s te r-W i n k e l
P o la ri s a ti o n p a ra lle l
zu r E i n fa lls e b e n e
0
10
20
30
40
50
60
70
80
90
E i n fa lls w i n k e l a lp h a
) Berechnen Sie den Brewster-Winkel und den Grenzwinkel für die Totalreflexion!
………………………………………………………........................................
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.61/67
b) Schall / Ultraschall
Auch beim schrägen Einfall einer Schallwelle auf eine Grenzfläche wird ein Teil der Welle
reflektiert, ein anderer Teil dringt ins Medium ein, wird aber gebrochen. Der
Reflexionskoeffizient
ergibt
sich
wieder
aus
der
Energieerhaltung
und
Stetigkeitsbedingungen. Da Schallwellen in Fluiden (Flüssigkeiten und Gase) stest
sind,
müssen
wir
hier
nicht
zwischen
verschiedenen
Longitudinalwellen
Polarisationsrichtungen unterscheiden.
Die Schall-Brechung ergibt sich aus den Schallgeschwindigkeiten in den beiden Medien,
sin α c1
= .Für den Wellenwiderstand gilt (Gl.4.2.21.) Z1 = ρ1 ⋅ c1 bzw. Z 2 = ρ2 ⋅ c2 . Da die
sin β c2
Dichte der beiden Medien normalerweise verschieden ist, gibt es bei Schall im Gegensatz zu
Licht keinen allgemeinen Zusammenhang zwischen Z und c. Man erhält …
Reflexionskoeffizient für Schall:
r=
Z 2 cos α − Z1 cos β
Z 2 cos α + Z1 cos β
Beispiel: Übergang von Muskel zu Fettgewebe,
[Gl.4.2.95.]
ρ1 = 1170 kg/m 3 , c1 = 1570 m/s
ρ 2 = 921 kg/m 3 , c2 = 1445 m/s
R e fl . K o e ff. r
R e fle xi o n u n d B re c h u n g b e i S c h a ll
1
0 .9
0 .8
0 .7
0 .6
0 .5
0 .4
0 .3
0 .2
0 .1
0
-0 .1
-0 .2
-0 .3
-0 .4
-0 .5
-0 .6
-0 .7
-0 .8
-0 .9
-1
r_ s c h (a lp h a )
0
10
20
30
40
50
60
70
80
90
E i n fa lls w i n k e l a lp h a
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.62/67
4.2.9.4 Beugung
Trifft eine ebene Welle auf ein Hindernis (z.B. eine Blende), so werden die Elementarwellen
zum Teil absorbiert. Infolgedessen können sich die verbleibenden Elementarwellen hinter der
Blende nicht mehr zu einer ebenen Welle aufaddieren.
...
Hinter der Blende breiten sich Wellen in
andere Richtungen aus Ö BEUGUNG!
Die
bei
der
Beugung
...
auftretenden
λ
Winkel sind von der Größenordnung
b
(b : Breite der Blende). Bei Schall treten
auf Grund der großen Wellenlänge (≈ m)
große Winkel auf (wir können „um die
Ecke hören“). Bei sichtbarem Licht sind
die Beugungswinkel meist sehr klein.
Dies ist allerdings lediglich eine Frage
der Größe der Hindernisse und der
Wellenlänge. Auch Licht wird (an
kleinen
Strukturen)
gebeugt.
Im
Gegensatz zu Schall (Wellenlänge ≈ m)
breitet sich Ultraschall überwiegend
geradlinig aus („Ultraschall-Strahl“).
Elementarwellen
addieren sich zu
Ebener Wellenfront!
„Hindernis“ (Blende) absorbiert
Teile der Elementarwellen. Rest
addiert sich nicht mehr zu
ebener W.-Front au
Welle breitet sich auch in andere
Richtungen aus („geht um die
Ecke“)
Durch Beugungseffekte wird das Auflösungsvermögen optischer Apparate (Mikroskop,
Teleskop …) begrenzt. Auch die Breite der Ultraschall-Keule eines Ultraschallgebers ist
durch die Beugung gegeben!
a) (Idealer, sehr dünner) Spalt
Ein (∞-) dünner Spalt (bzw. eine sehr kleine, „punktförmige“)
Blende läßt nur „eine einzige“ Elementarwelle durch. Hinter dem
Spalt breitet diese Elementarwelle (unter allen Winkel) aus.
eine
Elementarwelle
jeder Spalt ist Quelle
einer Elementarwelle
b) (Idealer) Doppelspalt
Bei einem Doppelspalt aus zwei (∞-) dünnen Spalten
(Abstand g) überlagen sich die zwei Elementarwellen
und interferieren. Für einen weit entfernten Beobachter
unter dem Winkel α haben die 2 Wellen den
Gangunterschied Δ.
Es ist
Δ
α
g
Δ
= sin(α) . Damit erhält man für ein …
g
Interferenz-Maximum
(konstr. Interf.)
Δ = m⋅λ
m = 0, 1, 2 …
Interferenz- Minimum
(destr. Interf.)
Δ = (2m + 1) ⋅
λ
2
m⋅λ
g
2m + 1 λ
, sin(α) =
⋅
g
2
,
sin(α) =
[Gl.4.2.96.]
[Gl.4.2.97.]
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.63/67
m = 0, 1, 2 …
c) Spalt (Breite b)
Die Winkel, bei denen destruktive Interferenz
(„Minima“) auftreten, erhält man, wenn sich alle vom Spalt
ausgehenden Elementarwellen paarweise wegheben. Dazu b
teilt man den Spalt in Gedanken zunächst in 2 Teile:
Welle c + d ⇒
„0“
M
Welle e + f ⇒
„0“
b
… alle anderen (Abstand ) ergeben ebenfalls „0“!
2
α
4
3
2
1
Der Gangunterschied zwischen Welle c u. d , e u. f,… ist Δ =
λ
2
b
λ
Teil man den Spalt in 4 Teile (jeweils b/4) … Δ = ⋅ sin α 2 =
4
2
b
λ
…
6 Teile (jeweils b/6) … Δ = ⋅ sin α 2 =
6
2
Das erste Minimum ergibt sich bei
Δ=
b
⋅ sin α1 .
2
λ
b
λ
⇒ sin α 2 = 2 ⋅
b
λ
⇒ sin α 3 = 3 ⋅
b
⇒ sin α1 = 1⋅
sin α m = m ⋅
Minimum Nr. m ( m = 1 , 2 , 3 , … ) bei
λ
b
[Gl.4.2.98.]
Konstruktive Interferenz („Maxima“) erhält man …
1⎞ λ
⎛
a) näherungsweise (!) in der Mitte zwischen 2 Minima, also bei sin α Max ≈ ⎜ m + ⎟ ⋅
2⎠ b
⎝
b) in „Vorwärtsrichtung“, d.h. bei α = 0° !
Zur Berechnung der Intensitätsverteilung zerlegt man den Spalt in
unendlich viele infinitesimale Teile und addiert (→ integriert) die
Amplituden dieser Wellen:
Ampl. (E-Feld) der im inf. Intervall ( x, x + d x ) ausges. Welle:
d E = C ⋅ e jkΔ ( x ,α ) ⋅ d x
b
x
Δ
α
0
Dabei ist „C“ eine Konstante (unabh. von x und α).
Der Gangunterschied Δ hängt von x und α ab:
Δ = sin α ⋅ x
Die res. Amplitude ergibt sich durch Integration über die Spaltbreite:
b
Eˆ (α ) = ∫ C ⋅ e jk sin α⋅ x d x
0
Eˆ (α ) =
[
]
C
⋅ e jk sin α⋅b − 1
jk sin α
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.64/67
I (α ) = C 2
sin 2 ( 12 kb ⋅ sin α )
( 12 kb ⋅ sin α )2
= 4 sin 2 ( 12 sin α⋅kb )
2π
und I0 = Intensität bei α=0 :
Mit k =
λ
⎡ ⎛ b
⎞⎤
⎢ sin ⎜ π λ ⋅ sin α ⎟ ⎥
⎠⎥
I (α ) = I 0 ⋅ ⎢ ⎝
⎢ ⎛ π b ⋅ sin α ⎞ ⎥
⎟ ⎥
⎢⎣ ⎜⎝ λ
⎠ ⎦
2
Beugung am Spalt
(b = 0.1 mm, λ = 400 nm)
Intensität /willk. Einh.
Die Intensität erhält man aus dem
Betragsquadrat der resultierenden Amplitude:
2
2
C2
I (α ) = Eˆ (α ) = 2 2 ⋅ e j sin α⋅kb − 1
k sin α 14243
100
80
60
40
20
Mit der Abkürzung η =
b
⋅ sin α wird dies
λ
2
⎡ sin (πη) ⎤
(
)
etwas übersichtlicher: I α = I 0 ⋅ ⎢
⎥ .
⎣ πη ⎦
[Gl.4.2.99.]
• Minima
(aus sin (πη) = 0 ) bei
• Maxima
(1. Abl. = 0 setzen …!) bei
0
-0.02 -0.015 -0.01 -0.005
0
0.005 0.01
0.015 0.02
α /rad
ηMin = ±1,± 2,± 3,K (wie oben!)
ηMax = ±1.43..,± 2.46..,± 3.47..,± 4.48..,K
sowie bei η = 0 das zentrale Maximum
(die oben verwendete Näherung entspricht
ηMax ≈ ±1.5,± 2.5,K )
d) Doppelspalt
Eine ähnliche Rechnung ergibt für die Intensitätsverteilung beim
Doppelspalt (Mittenabstand g, Spaltbreite b, es ist stets g>b !):
2
⎡ ⎛ b
⎞⎤
2
⎢ sin ⎜ π λ ⋅ sin α ⎟ ⎥ ⎡ ⎛ g
⎞⎤
⎠
⎝
⎥ ⋅⎢cos⎜ π ⋅ sin α ⎟⎥
I (α ) I 0 = ⎢
λ
⎢ ⎛ π b ⋅ sin α ⎞ ⎥ 1
⎣ 4⎝44
⎦
244⎠4
3
⎜
⎟
⎥
⎢⎣ ⎝ λ
Interferen
zfunktion
⎠4
⎦
1444244
3
b
g
α
b
Einzelspaltfunktion
(I0 : Intensität bei α=0)
[Gl.4.2.100.]
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.65/67
/w.E.
Beugung am Doppelspalt
Doppelspalt
Spalt
100
Intensität
Der erste Faktor stellt die Intensitätsverteilung des
Einzelspalts mit Spaltbreite b dar. Der zweite Faktor ergibt
sich aus der Interferenz zwischen den von den beiden
Spalten ausgehenden Wellen. Er variiert schneller als der
erste Faktor (wegen g>b). Die Einzelspaltfunktion ist also
die
Einhüllende
der
schnell
variierenden
Interferenzfunktion!
80
60
40
20
Beugung am Doppelspalt
(b = 0.1 mm, g = 0.323 mm, λ = 400 nm)
0
-0.01
-0.005
0
α /rad
0.005
0.01
e) Gitter
Wird die Zahl p der Spalte („Strichzahl“) weiter erhöht, so treten in der Interferenzfunktion
(große) Haupt- und (kleine) Nebenmaxima auf. Mit zunehmender Anzahl p werden die
Nebenmaxima immer kleiner, die Hauptmaxima immer schärfer und höher (siehe dazu
Gnuplot-Datei spalt.plt!). Im Bereich des Hauptmaximums der einhüllenden
Spaltfunktion treten dann mehrere weit getrennte Linien auf.
Beugung am Gitter, p = 40
I(a) * Interf(40,a)
I(a)
100
Intensität
/w.E.
80
60
40
20
0
-0.003
-0.002
-0.001
0
Alpha /rad
0.001
0.002
0.003
Die Maxima des Gitters erhält man, wenn der Gangunterschied zwischen benachbarten
Wellen ein Vielfaches der Wellenlänge beträgt (vergl. b), „idealer Doppelspalt“) :
m⋅λ
Δ = m ⋅ λ , m = 0, 1, 2 …
sin(α Max ) =
g
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.66/67
Da die Position der Maxima von der Wellenlänge abhängt und diese Maxima (bei großer
Strichzahl p) sehr schmal werden, eignen sich Gitter hervorragend dazu, Licht in seine Farben
zu zerlegen und präzise Wellenlängenmessungen zu machen.
Physik_4_2_Wellen.doc, Prof. Dr. K. Rauschnabel, HHN, 11.04.2010 23:41
S.67/67