Vorkurs Mathematik-Physik, Teil 6 1 Kinematik 2 Bewegung in einer
Werbung

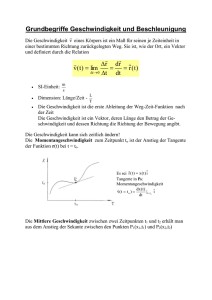
Vorkurs Mathematik-Physik, Teil 6 c 2016 A. Kersch 1 Kinematik In der Kinematik geht es um die Frage: wie kann ich Bewegungen, also Bahnen von punktförmigen (Kinematik der Translation) oder ausgedehnten Körpern (Kinematik der Drehbewegung), am besten beschreiben? Die vorläu…ge Antwort ist: die beste Beschreibung geschieht mit Hilfe von Ableitungen der Ortspositionen nach der Zeit. Die Begründung dafür gibt es aber erst in dem Abschnitt Dynamik. 2 2.1 Bewegung in einer Dimension Orts-Zeit Diagramm Im folgenden Diagramm werden zwei verschiedene geradlinige Bewegungen dargestellt. Geradlinig heiß t, dass die Bewegung in einer räumlichen Dimension statt…ndet. Die Darstellung dieser Bewegung als Graph einer Funktion der Zeit ergibt das Orts-Zeit Diagramm. Das folgende Diagramm beschreibt die gleichförmige Bewegung eines (punktförmigen) Jägers und die ungleichförmige Bewegung eines Hundes, der zwischen dem Jäger und dem Ziel in 10km Entfernung hin- und herpendelt. Die Kurve, die der Körper als Funktion von der Zeit beschreibt, ist die Bahnkurve x(t). Ein Ort-Zeit Diagram m m it Achsenb eschriftung Diagramme von physikalischen Vorgängen enthalten immer Achsenbeschriftungen. Die genannte physikalische Größ e hat immer eine Einheit. Die Schreibweise ist z.B. Größ e / Einheit oder Größ e / [Einheit]. 2.2 2.2.1 Di¤erenzialrechnung für Geschwindigkeit und Beschleunigung Mittlere Geschwindigkeit und Momentangeschwindigkeit Im Experiment können die Positionen des Wagens als Funktion der Zeit gemessen und im Orts-Zeit Diagramm aufgetragen werden. Der Wagen hat hier eine gleichförmige Bewegung. 1,2 1 x(t) = v t Ort (m) 0,8 0,6 v= 0,4 x 2 − x1 = t 2 − t1 0,8m − 0,2m m = 8,6 ⋅ 10 − 2 11,0 s − 3,0 s s 0,2 0 0 2 4 6 8 10 12 14 16 Zeit (s) Die mittlere Geschwindigkeit einer geradlinigen Bewegung ist ein Maßfür die Änderung des Ortes x in einem Zeitintervall t. Sie ist durch den Di¤erenzenquotienten gegeben v= x2 t2 x1 = t1 x t Der horizontale Strich bei v bezeichnet die zeitliche Mittelwertbildung über das Zeitintervall t. Im Falle einer gleichförmigen Bewegung (wie vom Jäger) wird die Bahnkurve durch eine Geradengleichung der Form x(t) = x0 + v t beschrieben, wobei v die Steigung der Geraden und x0 der Wert bei t = 0 ist. Im Falle einer nicht gleichförmigen Bewegung (wie vom Hund) ergeben sich für unterschiedliche Zeitintervalle t = t2 t1 unterschiedliche Di¤erenzenquotienten. Jedoch kann in jedem Zeitpunkt t1 der Grenzwert t2 ! t1 des Di¤erenzenquotienten berechnet werden. Dieser Grenzwert ist der Di¤erenzialquotient und beschreibt die Momentangeschwindigkeit der Bewegung in t = t1 v(t1 ) = lim t2 !t1 x2 t2 x1 x dx = lim = = x_ t!0 t1 t dt Die Momentangeschwindigkeit ergibt sich daher aus der Ableitung der Bahnkurve nach der Zeit. Neben der mathematischen Notation für die Ableitung nach der Funktion x(t) nach der Zeit gibt es die in der Physik gebräuchliche Notation x_ = x(t) _ = dx(t)=dt s(t) 10 5 0 0 1 2 t Bahnkurve Hund und Jger M ittlere Geschwindigkeit und M om entangeschwindigkeit v(t) 20 0 1 2 -20 Momentan-Geschw. Hund, Jaeger t Die Momentangeschwindigkeit einer gleichförmigen Bewegung (wie der des Jägers) ist jederzeit gleich groß und gleich v. x_ = v = const: Diese Gleichung wird Bewegungsgleichung der geradlinig, gleichförmigen Bewegung genannt. Bewegungsgleichungen beschreiben eine ganze Klasse von Bewegungen, hier diejenigen deren Bahnkurve nach der Zeit abgeleitet konstant sind. Die Bewegungen mit gleicher Geschwindigkeit unterscheiden sich dann noch durch die Anfangsbedingung x(t = 0) = x(0) = x0 Eine ganz bestimmte geradlinig, gleichförmige Bewegung wird daher beschrieben durch x_ = v = const x(0) = x0 Mathematisch gesehen ist dies eine Di¤erenzialgleichung mitsamt einer Anfangsbedingung. Die durch x(0) = x0 eindeutige Lösung (Bahnkurve) lautet x(t) = x0 + v0 t v(t) = v0 = const: Zusam m enfassung geradlinig, gleichförm ige Bewegung Die Bedeutung der Bewegungsgleichungen kommt daher, dass man in der Physik im Allgemeinen zunächst die Bewegungsgleichungen aufstellt (siehe Kapitel Dynamik), und für diese dann Lösungen berechnet. 2.2.2 Mittlere Beschleunigung und Momentanbeschleunigung Bei einer nicht gleichmäß igen Bewegung ändert sich die Geschwindigkeit. Solche Vorgänge treten beim Anfahren und Abbremsen auf, allgemein beim Beschleunigen (in unserem Beispiel ändert sich die Geschwindigkeit des Hundes über die Zeit). Dabei ändert sich die Geschwindigkeit. Die Beschleunigung ist das Maßfür die Änderung der Geschwindigkeit. Die Änderung der Geschwindigkeit v in einem Zeitintervall t kann wieder durch einen Di¤erenzenquotienten beschrieben werden, welcher die mittlere- oder Durchschnittsbeschleunigung beschreibt. Details der Bewegung in der Zeit von t1 nach t2 gehen darin nicht ein a= v2 t2 v1 = t1 v t Example 1 Wie hoch ist die mittlere Beschleunigung, um in 10:0s auf eine Geschwindigkeit von 100km=h zu kommen ? Solution 2 100 km 0 km 100 1000m m h h 3600s = 2:78 2 10s 10s s Diese Beschleunigung entspricht etwa 1=3 der Fallbeschleunigung g. Bei Beschleunigungen mit g sind die 100km=h in ca. 3:2s erreicht a= Die Momentanbeschleunigung wird wieder über den Grenzwert des Di¤erenzenquotienten de…niert v2 t2 !t1 t2 a = lim v1 v dv d = lim = = v_ = t!0 t t1 dt dt dx dt = d2 x =x • dt2 s(t) 10 s(t) 4 5 2 0 0 0 1 0 2 1 2 s(t) = 21 a t2 Bahnkurve Hund und Jger v(t) 4 v(t) 20 2 (1) 0 1 2 0 0 -20 2 v(t) = a t Momentan-Geschwindigkeit Hund und Jger a(t) 1 a(t) 4 200 2 0 1 2 0 0 -200 2 a(t) = a Momentan-Beschleunigung Hund und Jger 2.3 1 Zusammenfassung Bewegungen werden durch ihre Bahnkurven beschrieben, zum einen als Graph im Orts-Zeit Diagramm, zum anderen durch Größ en, die Änderungen beschreiben: Geschwindigkeit ist Änderung des Ortes, Beschleunigung ist die Änderung der Geschwindigkeit. Der mathematische Formalismus ist die Di¤erenzialrechnung. Bewegungsgleichungen sind Di¤erenzialgleichungen, die eine ganze Klasse von Bahnkurven in einer allgemeinen Form zusammenfassen. Gegeben: x(t) v(t) a(t) Ort x(t) R x(t) = v(t)dt RtR x(t) = 0 0 a( )d d Geschwindigkeit v(t) = x(t) _ v(t) Rt v(t) = 0 a( )d Beschleunigung a(t) = x •(t) a(t) = v(t) _ a(t) Funktionale Abhängigkeit zwischen O rt, Geschwindigkeit und Beschleunigung für geradlinige Bewegungen 3 Bewegungsgleichungen und Bahnkurven als Lösung Das einfachste Beispiel für eine geradlinige, aber ungleichförmige Bewegung ist die gleichmäß ig beschleunigte Bewegung. Die Bewegungsgleichung für gleichmäß ig beschleunigte Bewegungen lautet nun x •(t) = a = const: Gleichmäß ig beschleunigte Bewegungen können sich dann noch durch verschiedene Anfangsgeschwindigkeiten v0 unterscheiden v(t = 0) = v0 ebenso durch verschiedene Startpositionen x0 x(t = 0) = x0 Wenn die Bewegungsgleichung einer Bewegung zusammen mit seinen Anfangsbedingungen gegeben ist, lässt sich die Bahnkurve der Bewegung ausrechnen. Man spricht hier von der Lösung der Bewegungsgleichung. Dies wird hier allgemein für den Fall einer geradlinig, gleichmäß ig beschleunigten Bewegung (mit Anfangsbedingungen) gezeigt x •(t) = a = const: v(t = 0) = v0 x(t = 0) = x0 Die Lösung geschieht durch zweifache Anwendung der Integration (auf beide Seiten der Gleichung) Zt 0 x •(t) = a Zt x •( ) d = a d ) t t x( _ )j0 = a j0 ) x(t) _ x(0) _ = at 0 Geschwindigkeitsgleichung x(t) _ = a t + v0 Zt Zt x( _ ) d = (a + v0 ) d 0 ) t x( )j0 = 1 2a 2 + v0 v(t) = a t + v0 t 0 ) 2 x(0) = 21 a t + v0 t x(t) 0 2 x(t) = 21 a t + v0 t + x0 Bahngleichung: Gra…sche Darstellung der Lösung der Bewegungsgleichung für eine gleichm äß ig b eschleunigte Bewegung Beipiel Ein allgemeinerer Fall ist eine geradlinige, ungleichmäß ige Bewegung, wie zum Beipiel x •(t) = k t v(t = 0) = v0 x(t = 0) = x0 Die Lösung geschieht durch zweifache Anwendung der Integration (auf beide Seiten der Gleichung) Zt 0 x •(t) = k t Zt x •( ) d = k t d ) t x( _ )j0 = k 1 2 t 2 0 ) x(t) _ 0 Geschwindigkeitsgleichung x(t) _ Zt 0 x(0) _ = = k2 t2 Zt k 2 x( _ )d = v(t) = k 2 2 t k 2 2 t + v0 + v0 2 + v0 d ) t x( )j0 = k1 23 3 + v0 t 0 ) x(t) x(0) = 0 Bahngleichung: x(t) = k 6 3 k 6 3 t + v0 t t + v0 t + x 0 a(t) 1.0 a(t) a(t) 1.0 4 0.5 0.5 2 0.0 0 0 0 2 a(t) = 1 2 3 4 1 2t a(t) = 0.0 1 t+1 2 v(t) = Rt 1 0 2 4 0 x 1 v(t) = d s(t) 20 Rt 1 0 1+ 2 3 s(t) = 3.1 2 Rt R 0 1 0 2 d d 2 3 4 3 4 x 4 2 0 x 1 a(t) 6 0 4 0 integral 1 0 (2) d 2 0 x 0 x s(t) 3 10 4 1 0 2 3 2 1 0 2 a(t) 3 5 0 1 stckweise de…niert v(t) 3 v(t) 10 0 t s(t) = 1 RtR 0 1 0 1+ 2 d d 3 0 x 0 1 2 x integral(integral) Der freie Fall Wenn die störende Luftreibung vernachlässigt oder ausgeschaltet werden kann, werden in der Nähe der Erdober‡äche alle Körper (auch wenn sie unterschiedlich schwer sind) mit einer gleich groß en, gleichmäß ig beschleunigten Bewegung senkrecht nach unten bewegt (sie „fallen“). Galileo Galilei 1564-164 3.1.1 Fallzeit und Fallgeschwindigkeit Example 3 Eine Kugel fällt aus einer Höhe von h = 1m. Fallzeit ? Fallgeschwindigkeit ? Solution 4 Anfangsbedingungen sind: y(t = 0) = y0 = h, v(t = 0) = v0 = 0m=s, a = const = g = 10m=s2 . Bahngleichungen (gelten für alle t) 1 2 gt v(t) = gt a= g 2 bei Kontakt mit dem Boden (gilt also nur für t = tF ) s s 1 2 2h 2 1m y(tF ) = 0 = h g t ) tF = = = 0:447 s 2 F g 10m=s2 y(t) = h Fallzeit tF g, Daraus folgt die Fallgeschwindigkeit v(tF ) = 3.1.2 gtF = g s p 2h = g r 2gh = 2 10 m s2 1m = 4:47 m s Der lotrechte Wurf Example 5 Ein Stein ‡iegt mit einer Anfangsgeschwindigkeit von 20m=s lotrecht nach oben. Gesucht sind: höchster Punkt, Steigzeit, Ort und Geschwindigkeit nach doppelter Steigzeit, die Graphen der Bahnkurven von y(t); v(t); a(t) Solution 6 Wir verwenden die Bahngleichungen (die Lösungen der Bewegungsgleichungen) in allgemeiner Form und setzen die Anfangsbedingungen des Problems ein a = const: 1 y(t) = y0 + v0 t + a t2 2 v(t) = v0 + a t Koordinatensystem nach oben orientiert (d.h. y wird nach oben größ er), daher Fallbeschleunigung jgj = 10m=s2 nach unten gerichtet, also a = g = 10m=s2 . Starthöhe y0 = 0, Startgeschwindigkeit v0 = 20m=s, also (gilt für alle t) 1 2 a= g v(t) = v0 g t y(t) = v0 t gt 2 Am höchsten Punkt (Scheitelpunkt) ist die Geschwindigkeit Null (gilt also nur für t = ts ) 0 = v(ts ) = v0 g ts Daraus ergibt sich die Steigzeit ts ts = v0 20m=s = = 2s g 10m=s2 Damit ist die Steighöhe ys ys = y(ts ) = v0 ts 1 g 2 1 2 v0 g t = v0 2 s g v0 g 2 2 = 1 (20m=s) 1 v02 = = 20m 2 g 2 10m=s2 Die Höhe nach der doppelten Steigzeit ist 1 v0 2 g (2ts ) = 2v0 2 g y(2ts ) = v0 2ts und die Geschwindigkeit v(2ts ) = v0 y[m] 20 y(t)=20m/s*t - 5m/s2*t2 g 2ts = v0 20 v[m/s] 10 g2 v0 = g 4 g 2 v0 g v0 = v(t)=20m/s - 10m/s2*t 2 =0 20 m s a[m/s2] a(t)=-10m/s2 10 15 0 0 -10 -10 10 5 0 -20 0 1 2 3 4 t [s] 0 1 2 3 4 t [s] 0 1 2 3 4 t [s] Ort-, G eschwindigkeit- und Beschleunigung- Zeit Diagram m des lotrechten Wurfes Example 7 Galilei macht seine Fallversuche von Turm von Pisa. Dabei wirft er aus einer Höhe von h = 30m Kugeln mit einer Geschwindigkeit von v0 = 5m=s senkrecht nach oben, die dann bis auf den Boden fallen. Mit welcher Geschwindigkeit tre¤ en die Kugeln auf dem Boden auf ? Solution 8 Die Bahngleichung lautet (gilt für alle t) y(t) = h + v0 t v(t) = v0 1 2 gt 2 gt und für die Fallzeit gilt (gilt nur für t = tF ) 0 = h + v0 t F 0 = t2F tF = v0 g 1 2 gt 2 F 2v0 tF g s v0 2 + g 2h g 2h = g v0 g tF = >0 <0 s v0 g 2 + 2h g für + , Fallzeit= Kontakt mit Boden in der Zukunft für , Kontakt mit Boden in der Vergangenheit Die Lösung mit entspricht der Zeit in der Vergangenheit, in der die Kugel den ersten Kontakt mit dem Boden gehabt haben könnte. Die Geschwindigkeit nach Erreichen der Fallzeit ist q v = v(tF ) = g tF = v0 + g tF = v02 + 2gh Anders ausgedrückt gilt für v (in der Höhe y(tS ) = 0 oder wenn h als Höhendi¤ erenz aufgefasst wird) v2 v02 = 2gh Und für die Zahlenwerte r q m 2 v(tF ) = v0 + 2gh = 5 s 2 +2 10 m s2 Hier ist es egal (wegen den Quadraten), ob die Kugel mit v0 oder 30m = 25:0 m s v0 geworfen wurde ! Exercise 9 Wurf senkrecht nach unten: Ein Stein wird senkrecht nach unten geworfen. Stellen Sie die Bahngleichungen auf und illustrieren Sie diese in einem y(t)-, v(t)-, a(t)- Diagramm dar. y(t) = h v0 t 21 gt2 v(t) = v0 gt a(t) = g 3.2 3.2.1 Ungleichmäß ig beschleunigte Bewegungen Geradlinige Fallbewegung mit elastischer Re‡ektion am Boden (Gummiball) Experiment Orts-, Geschwindigkeit- und Beschleunigungskurven hängen über Ableitungen zusammen. Diese Gesetzmäß igkeit kann an dem Messergebnis (hier schematisch wiedergegeben) explizit überprüft werden. Ort-, G eschwindigkeit- und Beschleunigung-Zeit Diagram m des Schlittens auf der schiefen Eb ene 3.2.2 Harmonische Schwingung Die geradlinige harmonische Schwingung wird hier zunächst über die Bahnkurve de…niert. Später wird gezeigt werden, dass eine solche Bewegung z.B. von einer Masse ausgeführt wird, die an einer Feder hängt und angestoß en wird. Die Bewegung ist ungleichmäß ig beschleunigt. Die harmonische Schwingung y(t) = C sin (!t) f (x) = sin x ist eine periodische Funktion mit einer Periode 2 was das Funktions-Argument betri¤t. Die Schwingungsdauer T ist daher gegeben durch !T = 2 Die Größ e ! = 2 =T wird Kreisfrequenz oder Winkelgeschwindigkeit genannt. Der Vorfaktor C hat die physikalische Bedeutung der maximalen Amplitude ymax = C und die Einheit der Länge. Die Geschwindigkeit der Bewegung ist v(t) = y_ = dy(t) = !C cos (!t) dt Der Vorfaktor hat die physikalische Bedeutung der maximalen Geschwindigkeit vmax = !C und die Einheit der Geschwindigkeit. Die Beschleunigung der Bewegung ist a(t) = y• = dv(t) = dt ! 2 C sin (!t) Der Vorfaktor hat die physikalische Bedeutung der maximalen Beschleunigung amax = ! 2 C und die Einheit der Beschleunigung. Diagramm Ort, Geschwindigkeit, Beschleunigung 6 4 y( t) 2 v( t) 0 0.5 1 1.5 2 2.5 3 a ( t) 2 4 6 t Zeit Ort-, G eschwindigkeit- und Beschleunigung-Zeit Diagram m einer harm onischen Schwingung 3.2.3 Andere ungleichmäß ige Beschleunigung Zunächst ein Beispiel, mit gegebener Bewegungsgleichung und gesuchter Bahngleichung. p Example 10 Ein Auto habe eine nicht-gleichmäß ige Beschleunigung von a(t) = b t, d.h. die Beschleunigung nimmt mit der Zeit zu. Bahnkurve ? Anfangsbedingungen x(0) = 0, v(0) = 0 Solution 11 Erste Integration zur Berechnung der Geschwindigkeit p a(t) = x •(t) = b t Zt Zt 1 t 0 0 x •(t )dt = b t01=2 dt0 ) x(t _ 0 )j0 = b t1+1=2 1 + 1=2 0 0 t 0 ) x(t) _ = 2 3=2 bt 3 Die Geschwindigkeit steigt schneller an als linear. 2. Integration zur Berechnung der Position Zt 0 0 0 x(t _ )dt = Zt 2 03=2 0 bt dt 3 ) t x(t0 )j0 = 1 2 b b t1+3=2 3 1 + 3=2 0 t 0 ) x(t) = 2 2 5=2 bt 53 Die Ortskoordinate wächst schneller als quadratisch. 3.3 Zusammenfassung Die Bahnkurve einer gleichmäß ig beschleunigten Bewegung ist 1 x(t) = x0 + v0 t + a t2 2 3.4 v(t) = v0 + a t SVA Diagramme von Bewegungen Beispiele für x(t);v(t);a(t) Diagram m e gleichm äß iger und nicht-gleichm äß iger Bewegungen