Kinematik Leseprobe
Werbung

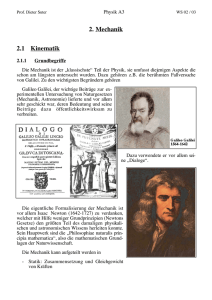
Leseprobe Günther / Fischer Kinematik TECHNISCHE MECHANIK Studienbrief 2-050-0910 3. Auflage 2007 HDL HOCHSCHULVERBUND DISTANCE LEARNING Verfasser: Prof. Dr.-Ing. habil. Wilfried Günther Professor für Technische Mechanik / Maschinendynamik im Fachbereich Maschinenbau und Kraftfahrzeugtechnik an der Westsächsischen Hochschule Zwickau unter Mitarbeit von: Prof. Dr.-Ing. habil. Karl-Friedrich Fischer Professor für Technische Mechanik / Festkörpermechanik im Fachbereich Maschinenbau und Kraftfahrzeugtechnik Rektor der Westsächsischen Hochschule Zwickau Der Studienbrief wurde auf der Grundlage des Curriculums für das Studienfach „Technische Mechanik“ verfasst. Die Bestätigung des Curriculums erfolgte durch den Fachausschuss „Grundständiges Fernstudium Wirtschaftsingenieurwesen“, dem Professoren der folgenden Fachhochschulen angehörten: HS Anhalt, FHTW Berlin, TFH Berlin, HTWK Leipzig, HS Magdeburg-Stendal, HS Merseburg, HTW Mittweida, FH Schmalkalden, FH Stralsund, TFH Wildau und WH Zwickau. Redaktionsschluss: Oktober 2007 3., aktualisierte Auflage 2007 „ 2007 by Service-Agentur des Hochschulverbundes Distance Learning mit Sitz an der FH Brandenburg. Das Werk ist urheberrechtlich geschützt. Die dadurch begründeten Rechte, insbesondere das Recht der Vervielfältigung und Verbreitung sowie der Übersetzung und des Nachdrucks, bleiben, auch bei nur auszugsweiser Verwertung, vorbehalten. Kein Teil des Werkes darf in irgendeiner Form ohne schriftliche Genehmigung der Service-Agentur des HDL reproduziert oder unter Verwendung elektronischer Systeme verarbeitet, vervielfältigt oder verbreitet werden. Service-Agentur des HDL (Hochschulverbund Distance Learning) Leiter: Dr. Reinhard Wulfert in der Agentur für wissenschaftliche Weiterbildung und Wissenstransfer e. V. Magdeburger Straße 50, 14770 Brandenburg Tel.: 03381 - 355 740 E-Mail: [email protected] Fax: 03381 - 355 749 Internet: http://www.aww-brandenburg.de Technische Mechanik Kinematik Inhaltsverzeichnis Randsymbole .............................................................................................................................. 4 Einleitung ................................................................................................................................... 5 Literaturempfehlung.................................................................................................................. 5 1 Kinematik des Massenpunktes .................................................................................... 6 1.1 1.1.1 1.1.2 1.1.3 1.2 1.3 1.4 1.5 Kinematische Größen..................................................................................................... 6 Punktbahn...................................................................................................................... 6 Geschwindigkeit ............................................................................................................ 7 Beschleunigung ............................................................................................................. 8 Geradlinige Bewegung................................................................................................... 8 Ebene Bewegung ......................................................................................................... 11 Zusammenfassung ....................................................................................................... 14 Übungsaufgaben .......................................................................................................... 14 2 Kinematik des starren Körpers ................................................................................. 16 2.1 2.2 2.3 2.4 2.5 2.6 Bewegungsarten........................................................................................................... 16 Rotation um eine feste Achse ....................................................................................... 18 Allgemeine Bewegung ................................................................................................. 20 Ebene Bewegung ......................................................................................................... 21 Zusammenfassung ....................................................................................................... 24 Übungsaufgaben .......................................................................................................... 24 Lösungshinweise zu den Übungsaufgaben............................................................................... 27 Literaturverzeichnis................................................................................................................. 30 Kinematik Technische Mechanik 1 Kinematik des Massenpunktes Um die Bewegung eines Körpers bzw. Körpersystems (z. B. Fahrzeug) zu beschreiben, ist die Angabe der Bewegung aller Körperpunkte notwendig. Für einzelne Fragestellungen, wie z. B. die Bewegung eines Fahrzeuges als Ganzes gegenüber der Straße, ist es ausreichend, die Bewegung eines Punktes (z. B. des Schwerpunktes) zu kennen. Wir beschäftigen uns deshalb zunächst mit der Punktkinematik. 1.1 Kinematische Größen 1.1.1 Punktbahn Ändert sich zeitlich die Lage eines Massenpunktes P, so nennt man die Gesamtheit der Lagen „Bahn des Massenpunktes P“ (Punktbahn). Die Zeit wird mit t bezeichnet. Die Punktlagen werden eindeutig durch den zeitabhängigen Ortsvektor G r(t) beschrieben, der von einem raumfesten Bezugspunkt 0 zur augenblicklichen Lage von P zeigt (vgl. Bild 1.1). y P' r (t +∆ t) ∆r P ey r (t) 0 z Bild 1.1 x ex ez G Ortsvektor r(t) zur Beschreibung der Punktbahn Für den Ortsvektor gilt bezüglich des kartesischen Koordinatensystems G G G mit den Basisvektoren e x , ey , e z (Einheitsvektoren) die folgende Komponentendarstellung: G G G G r(t) = x(t) e x + y(t) e y + z(t) e z . (1.1) Die Komponenten x(t), y(t) und z(t) entsprechen den kartesischen Koordinaten des Punktes P. Sie sind zur eindeutigen Festlegung der einzelnen Lagen eines frei beweglichen Punktes notwendig. Die drei Koordinaten beschreiben die drei Bewegungsmöglichkeiten oder Freiheitsgrade des Punktes. 6 Technische Mechanik Kinematik Allgemein können wir formulieren: Besitzt ein Massenpunkt bzw. Körper n Freiheitsgrade, dann sind n unabhängige Koordinaten erforderlich, um seine Bewegung zu beschreiben. M Für einen frei beweglichen Massenpunkt im Raum gilt n = 3, entsprechend den drei möglichen Verschiebungen in Richtung der zueinander senkrechten Koordinatenachsen. Bewegt sich ein Massenpunkt auf einer Kurve, dann ist nur eine Verschiebung längs der Kurve möglich und folglich ist n = 1. 1.1.2 Geschwindigkeit Wir ermitteln nun die Geschwindigkeit, mit der ein Massenpunkt P die Punktbahn durchläuft. Dazu betrachten wir die zwei benachbarten Punktlagen P und P' zu den Zeitpunkten t und t + ∆ t . Die Lagen werden durch G K die Ortsvektoren r(t) und r (t + ∆ t) festgelegt (vgl. Bild 1.1). Die Geschwindigkeit ist der Grenzwert der zeitlichen Änderung des Ortsvektors: G G G G G r(t + ∆ t) − r(t) ∆ r d r G v(t) := lim = lim = =r . (1.2) ∆ t→0 ∆ t→ 0 ∆ t ∆t dt D G Sie ist folglich die Zeitableitung des Ortsvektors r(t) . Wir wollen im Weiteren die Zeitableitung einer Größe durch einen Punkt über der Größe kennzeichnen (Punktableitung). G Der Geschwindigkeitsvektor v(t) hat die Richtung der Bahntangente, da G die Sekantenrichtung des Änderungsvektors ∆ r im Grenzfall ∆ t → 0 in die Tangentenrichtung übergeht. Sein Richtungssinn entspricht dem Durchlauf der Punktbahn. Für das kartesische Koordinatensystem, das wir als raumfestes annehmen (die Basisvektoren ändern sich in der Zeit nicht), ergibt sich durch Differenzieren des Ortsvektors, Gl. (1.1), die Komponentendarstellung der Geschwindigkeit: G G G G G G G G ex + y(t) e y + z(t) ez . v = r = v x ex + v y e y + v z ez = x(t) (1.3) Für den Betrag der Geschwindigkeit gilt dann: v = v 2x + v 2y + v 2z = x 2 + y 2 + z 2 . Gebräuchliche Maßeinheiten der Geschwindigkeit sind m/s bzw. km/h. Es gilt die Umrechnung: 1 m/s = 3,6 km/h. 7 Kinematik Technische Mechanik 1.1.3 Beschleunigung Die Geschwindigkeit ändert sich im Allgemeinen mit der Zeit. Ein Maß dafür ist die Beschleunigung. Sie ist wie folgt definiert: D Die Beschleunigung ist der Grenzwert der zeitlichen Änderung des Geschwindigkeitsvektors: G G G G G v(t + ∆ t) - v(t) ∆v d v G (1.4) a(t) := lim = lim = =v . ∆ t→0 ∆ t → 0 ∆t dt ∆t Der Beschleunigungsvektor ist somit die Zeitableitung des Geschwindigkeitsvektors. Über seine Richtung kann vorerst keine Aussage getroffen werden. Im raumfesten kartesischen Koordinatensystem liefert die Differentiation von Gl. (1.3) die Komponentendarstellung der Beschleunigung: G G G G G G G G a = v = a x e x + a y e y + a z e z = x(t) e x + y(t) e y + z(t) e z . (1.5) Für den Betrag folgt: a = a 2x + a 2y + a 2z = x 2 + y 2 + z 2 . Die Beschleunigung besitzt die gebräuchliche Einheit m/s2. 1.2 Geradlinige Bewegung Ein wichtiger Sonderfall der Punktbewegung ist die geradlinige Bewegung. Beispiele dafür sind der freie Fall eines Körpers oder die ebene Geradeausfahrt eines Fahrzeuges. Wir nehmen zur Vereinfachung an, dass sich der Massenpunkt P längs der x-Achse bewegt (vgl. Bild 1.2): G G r(t) = x(t) ex . ex x (t) Bild 1.2 P x Geradlinige Punktbewegung Die Geschwindigkeit nach Gl. (1.3) und die Beschleunigung nach Gl. (1.5) vereinfachen sich zu: G G G ex , , v(t) = v x e x = x(t) v = x(t) G G G a(t) = a x e x = x(t) e x , a = x(t) . 8 Technische Mechanik Kinematik Ist die Beschleunigung a konstant, dann sprechen wir von einer gleichmäßig beschleunigten bzw. gleichmäßig verzögerten, und bei a = 0 von einer gleichförmigen Bewegung. M In Abhängigkeit davon, welche Größen bei einer kinematischen Problemstellung gegeben (geg.) und gesucht (ges.) sind, unterscheidet man verschiedene kinematische Grundaufgaben. Wir beschränken uns auf den Sonderfall, dass die gegebene Größe nur von der Zeit t oder von einer anderen kinematischen Größe abhängt, und betrachten hier drei wichtige Grundaufgaben. G1 geg.: x(t) und ges.: v = v(t), a = a(t) Entsprechend den Gln. (1.3) und (1.5) liefert die Differentiation nach der Zeit t: G dx , = x(t) dt dv d2 x a(t) = = = x(t) . dt d t2 v(t) = G2 geg.: a = a(t) und ges.: v = v(t), x(t) Die Geschwindigkeit v(t) erhält man aus Gl. (1.5) durch Integration nach der Zeit t. Dabei muss zur Festlegung der auftretenden Integrationskonstanten eine zusätzliche Angabe zur Geschwindigkeit am Anfang der Bewegung t = 0 getroffen werden. Wir geben die Anfangsgeschwindigkeit v0 vor, so dass die Anfangsbedingung (AB ) lautet: v (0) = v0 . Die unbestimmte Integration führt nach Trennung der Variablen auf: ∫ dv = ∫ a(t) d t ⇒ v = ∫ a(t) d t . a) Für die gleichmäßig beschleunigte Bewegung a(t) = a0 = konst. ergibt sich: v(t) = a 0 t + C1 . Die Konstante C1 wird für die AB v (0) = v0 bestimmt zu C1 = v0 und damit folgt: v(t) = a 0 t + v 0 . Das analoge Vorgehen zur Ermittlung des Weges x(t) unter Verwendung der Gl. (1.3) führt auf: x(t) = ∫ v(t) d t . 9 Kinematik Technische Mechanik Bei gleichmäßig beschleunigter Bewegung und der zusätzlichen AB für den Anfangsweg x(0) = x0 gilt: x(t) = a0 2 t + v0 t + x0 . 2 b) Im Sonderfall der gleichförmigen Bewegung a0 = 0 vereinfachen sich die Ausdrücke für Geschwindigkeit und Weg zu: v(t) = v 0 = konst. x(t) = v 0 t + x 0 . Die zeitlichen Verläufe der kinematischen Größen a, v, x sind in Bild 1.3 für die gleichmäßig beschleunigte (a)) und gleichförmige Bewegung (b)) gegenübergestellt. a) b) a a0 a0 = 0 t v v v0 v0 t t x x x0 x0 t Bild 1.3 G3 t Zeitliche Verläufe von Beschleunigung a (t), Geschwindigkeit v (t) und Weg x (t) für a) gleichmäßig beschleunigte und b) gleichförmige Bewegung geg.: a = a(x) und ges.: v = v(x) Bei dieser Grundaufgabe ist die Beschleunigung a nicht von der Zeit t sondern vom Weg x abhängig. Die Zeitintegration entsprechend Gl. (1.5) führt nicht zur Lösung. Jedoch unter Anwendung der Kettenregel der Differentiation folgt aus Gl. (1.5): a (x) = dv dv dx dv = = v . dt dx dt dx Nach Trennung der Variablen a ( x ) d x = v d v liefert die unbestimmte Integration der beiden Seiten die Lösung: v2 = 2 10 ∫ a(x) d x . Technische Mechanik Kinematik Bei gleichmäßig beschleunigter Bewegung a = a0 und für die AB x = x0 , v = v(x 0 ) = v 0 führt die Auswertung des Integrals und die Bestimmung der Konstanten C auf: v 2 = 2(a 0 x + C ) , AB: v02 = 2 (a 0 x 0 + C ) ⇒ C= 1 2 v0 − a 0 x 0 2 v = 2a 0 (x − x 0 ) + v02 . 1.3 Ebene Bewegung Bewegt sich ein Massenpunkt P in der Ebene, dann vereinfacht sich im Allgemeinen seine kinematische Beschreibung gegenüber der räumlichen Bewegung. Erfolgt die Bewegung z. B. in der x,y-Ebene, so entfällt in der Ortsvektordarstellung nach Gl. (1.1) die z-Komponente. Viele Punktbewegungen in der Technik lassen sich mit kartesischen Koordinaten nur sehr aufwändig beschreiben (z. B. Punkte von rotierenden Teilen). Das jeweils gewählte Koordinatensystem beeinflusst natürlich nicht den objektiven Bewegungsablauf, sondern nur die KomponentenG G G darstellung der Vektoren r, v, a. Wir wollen hier die ebene Bewegung eines Massenpunktes P unter Verwendung von Polarkoordinaten beschreiben (vgl. Bild 1.4): y r (t + dt) deϕ P dϕ eϕ dϕ P' der er r (t) ϕ x Bild 1.4 Ortsvektor bezüglich des Polarkoordinatensystems Diese Betrachtung ist besonders zweckmäßig für den bedeutenden SonG G derfall der Kreisbewegungen. Wir führen die Basisvektoren er und eϕ G (Einheitsvektoren in radialer und zirkularer Richtung) ein. Dabei ist er G immer zum bewegten Punkt P gerichtet, und eϕ steht senkrecht dazu. Der Ortsvektor hat damit die einfache Komponentendarstellung: G G r(t) = r e r . (1.6) Die Geschwindigkeit ergibt sich entsprechend der Gl. (1.2) durch Differenzieren nach der Zeit. Dabei muss berücksichtigt werden, dass sich die Richtungen der Basisvektoren mit der Zeit ändern. 11 Kinematik Technische Mechanik Bei Anwendung der Produktregel erhält man die Ableitung: G G G K v = r = r e r + r e r . G Wir ermitteln nun die Änderung des Basisvektors er bei einer kleinen (infinitesimalen) Drehung um dϕ in der Zeit dt. G G Der Änderungsvektor d e r besitzt den Betrag | d e r | = 1 ⋅ d ϕ und zeigt in G Richtung des Einheitsvektors e ϕ (vgl. Bild 1.4). Für die zeitliche Änderung folgt: G 1 dϕ G d er G G e r = = e ϕ = ϕ e ϕ . dt dt Damit nimmt der Geschwindigkeitsvektor in Komponentenschreibweise nachfolgende Gestalt an: G G G v(t) = r e r + r ϕ e ϕ . (1.7) Die Geschwindigkeit setzt sich aus der radialen Komponente v r = r und der zirkularen Komponente vϕ = r ϕ zusammen. Die zeitliche Änderung des Winkels ϕ ist die Winkelgeschwindigkeit ω: ω = ϕ = dϕ . dt (1.8) Sie steht mit der Drehzahl nD direkt im Zusammenhang: nD = d ϕ ω . = d t 2π 2π Gebräuchliche Maßeinheiten von Winkelgeschwindigkeit und Drehzahl sind 1/s und 1/min. Die Differentiation von Gl. (1.7) nach der Zeit t führt unter Verwendung der Produktregel auf die Beschleunigung: G G G G G G G eϕ + r ϕ e ϕ . a(t) = v = r e r + r e r + r ϕ eϕ + r ϕ G Die Änderung des Basisvektors eϕ liest man aus Bild 1.4 ab: G G d e ϕ = 1 d ϕ (- e r ) . Damit ergibt sich für die Zeitableitung: G d eϕ G G dϕ G eϕ = =− er = − ϕ er . dt dt Schließlich erhalten wir für die Beschleunigung die Komponentendarstellung: G G G ) eϕ a(t) = (r − r ϕ 2) er + (2 r ϕ + r ϕ . (1.9) Die Beschleunigung besitzt die radiale Komponente a r = r - r ϕ 2 und . die zirkulare Komponente a ϕ = 2 r ϕ + rϕ 12 Technische Mechanik Kinematik = ω stellt die Die zeitliche Änderung der Winkelgeschwindigkeit ϕ 2 Winkelbeschleunigung mit der Einheit 1/s dar. Das Glied der Radialbeschleunigung − r ϕ 2 = − r ω2 wird als Zentripetalbeschleunigung und das Glied 2 r ϕ = 2 r ω der Zirkularbeschleunigung als Coriolis-Beschleunigung bezeichnet. Kreisbewegung Ein bedeutender Sonderfall ist die Bewegung eines Massenpunktes auf G einem Kreis. Der Abstand r bleibt konstant, d. h., r = r = 0, und eϕ G G zeigt immer in Richtung der Bahntangente ( eϕ ⊥ r ) . Die kinematischen Größen nehmen damit die einfache Gestalt an: G G r = r er , G G G (1.10) v = r ϕ eϕ = r ω eϕ , G G G G 2G eϕ = − r ω2 er + r ω eϕ . a = − r ϕ er + r ϕ Geschwindigkeit Es tritt nur die Geschwindigkeitskomponente in zirkularer Richtung (Tangentialrichtung) auf: vϕ = vt = r ω . (1.11) Beschleunigung Die Beschleunigung besitzt Komponenten in radialer und zirkularer (tangentialer) Richtung: a r = - rω 2 ⇒ Zentripetalbeschleunigung , (1.12) ⇒ Tangentialbeschleunigung . a ϕ = a t = rω Die Geschwindigkeits- und Beschleunigungskomponenten sind in Bild 1.5 dargestellt: a) Geschwindigkeit G eϕ . Bild 1.5 G er b) Beschleunigung G rω eϕ ϕ G r G eϕ . G er G eϕ rω G − rω2 er G r ϕ Komponenten der Geschwindigkeit und Beschleunigung bei Kreisbewegung 13 Kinematik Technische Mechanik 1.4 Zusammenfassung Die Kinematik beschreibt die Bewegung (Lageänderung) von Körpern bzw. einzelnen Massenpunkten rein geometrisch als Funktion der Zeit, ohne nach den Ursachen der Bewegung zu fragen. Sie erfasst somit nur die Bewegungsgeometrie. Bei der Betrachtung der Bewegung eines Massenpunktes werden unter Verwendung der Vektorschreibweise die wichtigen kinematischen Begriffe Weg, Geschwindigkeit und Beschleunigung und ihre Zusammenhänge behandelt. Die Komponentendarstellung dieser Vektorgrößen erfolgt bezüglich verschiedener Koordinatensysteme. In Abhängigkeit von der Art der Bewegung (geradlinig, eben, räumlich) ist ein geeignetes Koordinatensystem (z. B. kartesisch, polar) zu wählen. Für den Fall der geradlinigen Bewegung werden typische kinematische Grundaufgaben formuliert und gelöst. Sind der Weg bzw. die Geschwindigkeit gegeben, dann führt die Differentiation nach der Zeit auf die Beschleunigung. Bei gegebener Beschleunigung erhält man umgekehrt durch Integration die Geschwindigkeit und den Weg. Die dabei auftretenden Integrationskonstanten sind durch die Anfangsbedingungen zu bestimmen. Die ebene Bewegung eines Punktes lässt sich zweckmäßig mit Polarkoordinaten darstellen. Die Punktlage ist durch die Radialkomponente bestimmt. Geschwindigkeit und Beschleunigung besitzen jedoch im Allgemeinen Komponenten in radialer und zirkularer Richtung. Im Sonderfall der Kreisbewegung treten nur eine Geschwindigkeitskomponente in zirkularer Richtung (Tangentialgeschwindigkeit) und die zwei Beschleunigungskomponenten Zentripetal- und Tangentialbeschleunigung auf. Zur Übung dienen die folgenden Aufgaben. Ü 1.5 Übungsaufgaben Ü 1.1 Für eine geradlinige Punktbewegung sind bei unterschiedlichen Anfangsbedingungen die folgenden Teilaufgaben zu lösen: Nr. gegeben Anfangsbedingungen gesucht 1 x = c1 t 3 2 v = c2 t 3 x(0) = 0 x (t), v (x), a (t) 3 a = c3 t 3 x(0) = 0, v(0) = 0 v (t), x (t) 4 v = c4 x 2 x(0) = x0 t (x), x (t), a (x), a (t) 2 x(0) = x0, v(0) = v0 t (v), v (t), x (v) 5 a = c5 v v (t), a (t), a (x) Dabei sind c1 , c2 , c3 , c4 und c5 vorgegebene konstante Größen. 14 Technische Mechanik Ü 1.2 Kinematik Ein PKW fährt nach dem skizzierten Beschleunigungs-ZeitDiagramm (vgl. Bild 1.6) aus der Ruhe heraus an. geg.: a1 = 2 m/s2 , ges.: vEnd , xEnd t1 = 10 s, t2 = 2 t1 , a a1 t1 Bild 1.6 t2 t Geschwindigkeits-Zeit-Verlauf Berechnen Sie die Endgeschwindigkeit vEnd und den zurückgelegten Weg xEnd ! Ü 1.3 Ein Körper A wird im Punkt 0 mit einer Anfangsgeschwindigkeit vA0 unter einem Winkel α abgeschossen. Zur gleichen Zeit wird im Punkt B ein zweiter Körper mit vB0 senkrecht nach oben geschossen (vgl. Bild 1.7). geg.: vA0 = 90 m/s, α = 50 o , b = 60 m ges.: vB0 , damit sich die beiden Körper treffen y vA0 vB0 α B A 0 x b Bild 1.7 Ü 1.4 Ausgangslagen der Körper A und B An einem Automaten verlassen Kleinteile eine Rutsche und werden von einem Trichter (Außendurchmesser d) aufgefangen (vgl. Bild 1.8). Die Geschwindigkeiten bewegen sich in den Grenzen v0 = (1 ± 0,3) vK . geg.: vK = 1 m/s, d = 300 mm, h = 1.000 mm, b = 325 mm ges: Grenzen des Neigungswinkels α der Rutsche! 15 Kinematik Technische Mechanik b α v0 h x d A B y Bild 1.8 2 Geometrie von Rutsche und Trichter Kinematik des starren Körpers Im Folgenden wollen wir die Gesetzmäßigkeiten der Punktbewegung zur Beschreibung der Bewegung eines Körpers verwenden. Dabei wird sich auf das bereits aus der Statik bekannte Modell des starren Körpers beschränkt. S • Ziel dieses Kapitels ist es, zu verdeutlichen, dass sich der allgemeine Bewegungszustand eines starren Körpers aus Translation und Rotation zusammensetzen lässt. 2.1 Bewegungsarten Ein frei beweglicher starrer Körper im Raum besitzt sechs Freiheitsgrade (n = 6), nämlich drei Verschiebungsmöglichkeiten (Translationen) im Raum und drei Drehmöglichkeiten (Rotationen) um drei zueinander senkrechte Achsen. Aus der Statik ist uns bekannt, dass durch Lagerungen die Bewegungsmöglichkeiten des Körpers eingeschränkt werden. Wir wollen nun die einzelnen Bewegungsarten genauer erklären. Translation Bei der Translation bewegen sich alle Körperpunkte auf kongruenten Bahnen (vgl. Bild 2.1). Damit repräsentiert die Bewegung eines Punktes die Bewegung des gesamten Körpers. 16