Die Bewegung starrer Körper
Werbung

Kapitel 10
Die Bewegung starrer
Körper
10.1 Der starre Körper
Obwohl die Materie nach den Wahrnehmungen unserer Sinnesorgane
eine kontinuierliche Struktur zu haben scheint, setzt sie sich in Wirklichkeit aus Einheiten zusammen, welche sich zu regelmässigen
Anordnungen gruppieren, wie die Ziegel in einer Mauer.
Wir werden makroskopische Körper betrachten, als ob sie
eine kontinuierliche Masseverteilung besitzen würden (Siehe
Kap. 7.4.2).
471
Ein starrer Körper wird definiert als ein Körper, bei dem die
Änderung der Abstände zwischen allen seinen Massenelementen bei Anwendung einer Kraft oder eines Drehmoments vernachlässigt wird.
Ein starrer Körper behält seine Gestalt, wenn er sich bewegt.
Wir unterscheiden zwischen zwei Arten von Bewegungen:
Physik
472
Die Bewegung starrer Körper
1.
2.
Translationsbewegung: alle Teilchen (Atome oder Moleküle) des
Körpers beschreiben parallele Bahnen;
Drehbewegung: alle Teilchen beschreiben kreisförmige Bahnen
um eine Gerade, die man als Drehachse (oder Rotationsachse)
bezeichnet. Die Achse kann fixiert sein oder ihre Richtung während der Bewegung relativ zum Körper verändern.
Die allgemeine Bewegung eines starren Körpers kann immer
als Kombination einer Translations- und einer Rotationsbewegung betrachtet werden.
10.2 Vektorielle Beschreibung der
Drehbewegung
10.2.1 Drehung eines Körpers
Die kinematischen Grössen der Translationsbewegung (d.h. Verschiebung, Geschwindigkeit und Beschleunigung) wurden als Vektoren
eingeführt. Sie konnten bei der eindimensionalen Bewegung als skalare Grössen betrachtet werden.
Können zur Beschreibung der Drehbewegung in ähnlicher Weise
Vektoren verwendet werden? Wir wollen den allgemeinen Fall
betrachten, bei dem sich z.B. die Richtung der Drehachse zeitlich
ändert.
Wir wollen einen starren Körper betrachten, der sich um die D-Achse
dreht. Die Rotation des Körpers um diese Drehachse kann mit Hilfe
eines Drehwinkels q beschrieben werden.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Vektorielle Beschreibung der Drehbewegung
Der Drehwinkel q entspricht der Winkelverschiebung des
rotierenden Körpers, die der Körper bei der Rotation um die
Drehache überstreicht.
Könnte man einen solchen Drehwinkel als eine vektorielle Grösse
definieren? D.h.,
r
r
r
r
q = q x ex + q y ey + q z ez ?
Die Antwort ist nein! Die Drehwinkel addieren sich nicht vektoriell.
Man sieht z.B., dass wenn man zwei Drehungen in verschiedener
Reihenfolge durchführt, so sind die resultierenden Drehungen nicht
identisch:
r
r
r
r
q x ex + q y ey π q y ey + q x ex
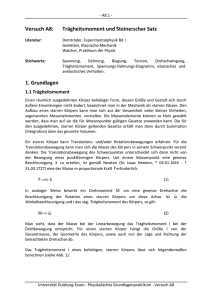
Wir können dieses Ergebnis beweisen, wenn wir die Rotation z.B.
zweier Bücher anschauen. Wir nehmen an, dass beide Bücher in der
vertikalen xz-Ebene liegen und definieren die Koordinatenachsen wie
in Abb. 1 gezeigt ist.
473
Eines der Bücher wird 90 Grad um die y-Achse und das andere wird
90 Grad um die z-Achse gedreht. Anschliessend wird das erste noch
90 Grad um die z-Achse und das andere 90 Grad um die y-Achse
gedreht. Die resultierende Orientierung der Bücher ist nicht identisch.
Physik
474
Zwei Bücher mit derselber Raumorientierung.
Die Bewegung starrer Körper
Figur 1.
Das Buch rechts wurde 90 Grad um die y-Achse und das Buch links
90 Grad um die z-Achse gedreht.
Figur 2.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Vektorielle Beschreibung der Drehbewegung
Das Buch rechts wurde noch 90 Grad um die z-Achse und das Buch
links noch 90 Grad um die y-Achse gedreht.
Figur 3.
Eine erste Rotation mit Drehwinkel a um die z-Achse ändert den
Ortsvektor folgendermassen (der Vektor bleibt in der xy-Ebene):
r
r
r
ra = r cosaex + r sin aey
r
r
r = rex
Man kann das Ergebnis auch beweisen, wenn wir endliche Rotationen eines Vektors um eine Achse betrachten. Wir nehmen den folgenden Anfangsvektor an:
1.
2.
ab
475
Eine zweite Rotation mit Drehwinkel b um die y-Achse ändert den
resultierenden Vektor so (die y-Komponente ist unverändert):
r
r
r
r
r = r cosa (cos bex - sin bez ) + r sin aey
r
r
r
= r cosa cos bex + r sin aey - r cosa sin bez
Physik
476
Die Bewegung starrer Körper
In ähnlicher Weise ergibt die Rotation mit vertauschter Reihenfolge:
r
r
r
r
rba = r cosa cos bex + r sin a cos bey - r sin bez
Tatsächlich bemerken wir, dass die resultierenden Vektoren nicht
identisch sind: die y und z-Komponenten sind verschieden.
z
Da
Da << 1, Db << 1
y
x
r
rDb
z
Db
y
Nun betrachten wir den Fall, bei dem die Winkel infinitesimal sind,
d.h. wir betrachten infinitesimale Drehungen. Wir ersetzen aÆDa
und bÆDb (Da ist die infinitesimale Drehung um die z-Achse und Db
ist die infinitesimale Drehung um die y-Achse) und nehmen an:
rDa
r
Mit dieser Näherung erhalten wir sinDaªDa und cosDbª1:
r
r
r
r r
rab ª rex + rDaey - rDbez ª rba
x
In erster Ordnung sind infinitesimale Drehungen kommutativ!
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Vektorielle Beschreibung der Drehbewegung
In diesem Fall kann ein infinitesimaler Drehvektor definiert werden:
r
r
r
Dq ∫ Dbey + Daez
wobei die infinitesimalen Drehungen um die z-Achse als z-Komponente und die infinitesimalen Drehungen um die y-Achse als y-Komponente des Drehwinkelvektors eingesetzt wurden.
Wohin zeigt der Drehvektor? Wenn z.B. Db=0, erhalten wir:
r
r
Dq = Daez
und der Vektor ist senkrecht zur Drehebene:
Im Allgemeinen zeigt der Drehvektor in eine Richtung senkrecht zur Ebene der infinitesimalen Drehung.
10.2.2 Der Winkelgeschwindigkeitsvektor
Der momentane Winkelgeschwindigkeitsvektor wird als die zeitliche Ableitung der Winkelverschiebung definiert
r
r
D
q
w∫
Dt
Die momentane Winkelgeschwindigkeit kann als Vektorgrösse
definiert werden, deren Richtung parallel zur Drehachse und
senkrecht zur Ebene der Rotation ist.
MKS-Einheit: s–1 oder Radian pro Sekunde
477
Die Richtung des Vektors ist gegeben, wie in Abb. 4 gezeigt ist. Seine
Richtung entlang der Drehachse wird durch die Rechte-Hand-Regel
gegeben. Für eine Drehung wie in Abb. 4 links zeigt er nach oben.
Physik
478
Die Bewegung starrer Körper
Wäre die Drehung umgekehrt (wie in Abb. 4 rechts), würde er nach
unten zeigen.
Die Winkelgeschwindigkeit kann als Vektorgrösse definiert werden.
Ihre Richtung ist zur Drehachse parallel und durch die Rechte-Hand-Regel
gegeben.
Figur 4.
Beispiel: wenn
r
r
r
Dq ∫ Dbey + Daez
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Vektorielle Beschreibung der Drehbewegung
gilt
r
r
r
r Dq Dbey + Daez Db r Da r
e +
e
w∫
=
=
Dt
Dt
Dt y Dt z
r
r dq db r da r
e
e +
Æw =
=
dt
dt y dt z
10.2.3 Der Winkelbeschleunigungsvektor
Die zeitliche Änderung des momentanen Winkelgeschwindigkeitsvektors heisst die momentane Winkelbeschleunigung:
r
r dw
a∫
dt
MKS-Einheit: s–2 oder Radian pro Sekunde im Quadrat
10.2.4 Beziehung zwischen Winkelgeschwindigkeit und
Geschwindigkeit
479
Wir betrachten wieder die folgende infinitesimale Drehung um die yund z-Achse:
r
r
r
Dq ∫ Dbey + Daez
Da << 1, Db << 1
Die resultierende Verschiebung des Ortsvektors ist gleich:
r r
r
Dr = rab - rex
r
r
= rDaey - rDbez
Physik
480
Die Bewegung starrer Körper
(
)
(
)
Wir betrachten das Kreuzprodukt:
r r
r
r
r
Dq ¥ r = Dq y rz - Dq z ry ex + ( Dq z rx - Dq x rz )ey + Dq x ry - Dq y rx ez
r
r
= ( Dar)ey + (- Dbr)ez
Damit bemerken wir, dass die Verschiebung des Ortsvektors als das
Kreuzprodukt des Drehwinkels und des Ortsvektors geschrieben werden kann:
r r
r
Dr = Dq ¥ r
Wenn die Verschiebung während eines Zeitintervalls Dt geschieht, ist
die entsprechende Geschwindigkeit gleich
r
r
r dr
Dr
v=
= lim
dt Dt Æ 0 Dt
r r
Dq ¥ r
= lim
Dt Æ 0
Dt
r r
=w¥r
wobei wir die Definition der Winkelgeschwindigkeit verwendet
haben. Wir diskutieren diese letzte Beziehung im nächsten Abschnitt
weiter.
10.3 Winkelgeschwindigkeit eines
starren Körpers
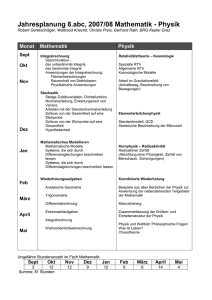
Ein starrer Körper dreht sich mit der Winkelgeschwindigkeit w, d.h.
mit einem Winkelgeschwindigkeitsvektor w (Siehe Abb. 5), um eine
Drehachse.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Winkelgeschwindigkeit eines starren Körpers
Wir stellen uns vor, dass der Körper viele Teilchen enthält. Wir wollen die Geschwindigkeit jedes seiner Teilchen bestimmen. Wir
bemerken, dass sie nur vom Abstand zur Drehachse abhängt! Sie ist
gleich
v i = rD,iw
wobei rD,i der Abstand des Teilchens von der Drehachse ist. Diese
Gleichung gilt für die Beträge. Wir wollen nun eine vektorielle Beziehung herleiten. Wir bemerken, dass
r r
r
fi v i = w ri sin g
v i = rD,iw
1
424
3
Beziehung für die
Beträge
wobei wir den Betrag des Ortsvektors ri verwendet haben. Siehe
Abb. 5. Die Gleichung enthält die Sinus-Funktion. Wir schliessen
daraus, dass die Geschwindigkeit mit Hilfe des Kreuzproduktes des
Ortsvektors und des Winkelgeschwindigkeitsvektors berechnet werden kann. Tatsächlich gilt:
r r r
v i = w ¥ ri
481
Mit der Rechte-Hand-Regel kann man verifizieren, dass die Richtung
der Geschwindigkeit die richtige ist, wenn wir das Kreuzprodukt in
dieser Ordnung, d.h. Winkelgeschwindigkeit “kreuz” Ortsvektor,
definieren. Diese Beziehung ist natürlich dieselbe, wie wir im letzten
Abschnitt für eine infinitesimale Drehung hergeleitet haben.
Physik
482
Die Bewegung starrer Körper
v i = ω × ri
ω
γ r
i
∆
vi
O (Ursprung)
Figur 5. Beziehung zwischen dem Winkelgeschwindigkeitsvektor und der
(linearen) Geschwindigkeit der Teilchen (Atome oder Moleküle) i des
rotierenden Körpers.
10.4 Energie des starren Körpers
Nun werden wir uns mit der Translation und Rotation eines starren
Körpers beschäftigen. Wir betrachten den starren Körper als ein Teil-
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Energie des starren Körpers
Ortsvektor
des Schwerpunkts
mi
Ortsvektor des Teilchens i
bezüglich des Schwerpunkts
ri,SP
SP
chensystem mit einer diskreten Anzahl von Teilchen. Der Ortsvektor
des Teilchens i des starren Körpers wird geschrieben als
r
r
r
ri =
r{
+
ri,SP
SP
{
ri
r SP
Der Ortsvektor ri, SP des Teilchens i bezüglich des Schwerpunkts.
Siehe Abb. 6.
Figur 6.
483
Wenn der starre Körper sich bewegt, wird seine Bewegung in
eine Translation des Schwerpunkts und eine Rotation um den
Schwerpunkt aufgeteilt.
Siehe Abb. 7.
Physik
484
SP
Rotation um
den Schwerpunkt
Die Bewegung starrer Körper
Bahnkurve
des Schwerpunkts
mi
ri,SP
SP
SP
Figur 7. Die Bewegung des starren Körpers wird in eine Translation des
Schwerpunkts und eine Rotation um den Schwerpunkt aufgeteilt.
Wir verwenden nun die allgemeinen Resultate über Teilchensysteme,
die wir in Kap. 7 hergeleitet haben.
In Kap. 7.12 haben wir gesehen, dass die gesamte kinetische Energie
eines Teilchensystems die Summe von zwei Termen ist: die kinetische Energie des Schwerpunkts und die kinetische Energie der einzelnen Teilchen relativ zum Schwerpunkt. Wir haben dieses Ergebnis so
ausgedrückt:
E kin
kinetische Energie der einzelnen
Teilchen relativ zum Schwerpunkt
r
r 2
1 r
1
= Â miv i2 = Â mi (v SP + v i,SP )
2
i =1, N 2
i =1, N
r 2
r 2
1
1
= M (v SP ) +
 m (v )
2 4243
2 =1,N i i,SP
1
1i 4
42443
kinetische Energie
des Schwerpunkts
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Energie des starren Körpers
bezüglich SP
wobei die Geschwindigkeit eines Teilchens als die Summe der
Schwerpunktsgeschwindigkeit und der Geschwindigkeit des Teilchens relativ zum Schwerpunkt ausgedrückt wurde
r r
r
v i = v SP + v i,SP
{
Nun werden wir die Rotation um die Drehachse betrachten.
Die Rotation entspricht der Bewegung bezüglich des Schwerpunkts, weil die Gestalt des starren Körpers sich nicht ändert.
r r
r
fi v i = w ri sin g = wrD,i
Als Folge geht die entsprechende Drehachse der Rotation um
den Schwerpunkt durch den Schwerpunkt des starren Körpers.
Weil
r r r
v i = w ¥ ri
1
i
r
r
i
 2 m (w ¥ r )
1
I w2
2 D
i =1, N
2
=
i
D, i
1
 2 m (wr )
i =1, N
ˆ
2
1Ê
= Á Â mi rD,i 2 ˜ w 2
2 Ë i =1,N
¯
wobei rD,i der Abstand des Teilchens i von der Drehachse ist, folgt,
dass die kinetische Energie bezüglich des Schwerpunkts (d.h. die
Rotationsenergie) gleich
Rot
E kin
=
∫
ist. Damit folgt die Definition:
ID ∫
i D, i
Âmr
i =1, N
2
485
Das Trägheitsmoment des Körpers I relativ zur Rotationsachse D ist definiert als
Physik
486
Die Bewegung starrer Körper
I D = Ú r 2 dm
Für eine kontinuierliche Masseverteilung ist es gleich:
MKS-Einheit: kg m2
Für die gesamte kinetische Energie des starren Körpers gilt deshalb
E kin
Energie der Rotation
um den Schwerpunkt
r 2 1
r 2
1
= M (v SP ) + Â mi (v i,SP )
2
2 i =1,N
r 2
1
1
I ,SPw 2
= M (v SP ) +
2 4243
24D2
1
1
4
3
kinetische Energie
des Schwerpunkts
Die Gesamtenergie ist die Summe der kinetischen und potentiellen
Energien (Siehe Kap. 7.13)
E = E kin + E pot
Energie der Rotation
um den Schwerpunkt
wie wenn die Gesamtmasse
im SP konzentriert wäre
r 2 1
1
= M (v SP ) + I D,SPw 2 + E pot ,externe + E pot, interne
2
2
r 2
1
1
= M (v SP ) +
I ,SPw 2 +
E pot ,externe
14
24
3
2 4243
24D2
1
1
4
3
Potentielle Energie
kinetische Energie
des Schwerpunkts
wobei wir mögliche Änderungen der internen potentiellen Energie in
der letzten Zeile vernachlässigt haben.
Wir erinnern uns daran, dass die externe potentielle Energie die gleiche ist, wie wenn die Gesamtmasse im Schwerpunkt konzentriert
wäre. In dieser Gleichung müssen wir deshalb zwei Bewegungen
unterscheiden:
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Energie des starren Körpers
1.
2.
Die Bewegung des Schwerpunkts mit Geschwindigkeit vSP unter
der Wirkung der äusseren potentiellen Energie. Die äussere potentielle Energie hängt nur von der Lage des Schwerpunkts ab und
wird berechnet, wie wenn die Gesamtmasse im Schwerpunkt konzentriert wäre.
Die Rotation des Körpers um seinen Schwerpunkt. Die Drehachse
geht durch den Schwerpunkt. Die Richtung der Drehachse kann
sich trotzdem mit der Zeit ändern.
10.4.1 Anwendung: Bewegung des Rotors
Wir betrachten einen Rotor mit zwei gleichen Massen m. Was ist die
Gesamtenergie des Systems?
Demonstrationsexperiment:Gewicht auf Rotor
487
Der Rotor besteht aus einer Achse und zwei Massen. Der Abstand r
zwischen den Massen und der Drehachse kann geändert werden. Ein
Ende einer masselosen Schnur wird um die Achse des Rotors aufgewickelt, und am anderen Ende der Schnur wird eine Masse M angehängt (Siehe Abb. 8).
Physik
488
Rotor mit Massen und einem aufgehängten Gewicht.
Die Bewegung starrer Körper
Figur 8.
Rotationsenergie der Massen m
1
I Dw 2
22
1
3
Die gesamte Energie des Systems ist gleich
Energie der Masse M
1
E = Mv 2 + Mgh +
2 4
1
4244
3
wobei w die Winkelgeschwindigkeit des Rotors ist (d.h. die Winkelgeschwindigkeit der Massen m um die Rotorachse), und v und h sind
die Geschwindigkeit und die Höhe der aufgehängten Masse.
Wenn die Masse M losgelassen wird (Anfangsbedingung:
v=0, d.h. w=0), wird ihre potentielle Energie Mgh in kinetische Energie der Masse M und Rotationsenergie des Rotors
umgewandelt.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Berechnung des Trägheitsmoments eines starren Körpers
i =1, N
i D, i
Âmr
2
= mr 2 + mr 2 = 2 mr 2
Das Trägheitsmoment des Rotors (d.h. der beiden Massen m) ist
gleich
ID ∫
Es nimmt mit dem Quadrat des Abstandes r zu.
Wenn sich beide Massen mit einer bestimmten Winkelgeschwindigkeit w um die Rotorachse drehen, dann ist umso
mehr Rotationsenergie im Rotor gespeichert, je grösser der
Abstand r von der Achse ist.
Es folgt, dass weniger Energie für die Translationsbewegung der
Masse M vorhanden ist.
Die Masse M wird desto langsamer fallen, je grösser der
Abstand r zwischen beiden Massen und der Rotorachse ist.
10.5 Berechnung des
Trägheitsmoments eines starren
Körpers
Ein starrer Körper besteht aus einer sehr grossen Zahl dicht gepackter
Teilchen. Für eine solche kontinuierliche Masseverteilung wird das
Trägheitsmoment mit dem Integral gewonnen
I D = Ú r 2 dm
489
wobei r der Abstand des Massenelements dm von der Drehachse ist.
Physik
490
Die Bewegung starrer Körper
10.5.1 Trägheitsmoment eines homogenen Ringes
Wir betrachten die Drehbeweung eines homogenen Ringes um eine
Achse, die durch seinen Mittelpunkt geht und senkrecht zur Ringebene liegt.
Beim Ring mit Radius R befindet sich die gesamte Masse beim konstanten Abstand R. Das Integral ist dann
I D ( Ring) = Ú r 2 dm = R 2 Ú dm = MR 2
wobei M die gesamte Masse des Ringes ist.
10.5.2 Trägheitsmoment eines homogenen Zylinders
Wir betrachten das Trägheitsmoment eines homogenen Zylinders mit
Gesamtmasse M und Radius r bezüglich der Zylinderachse.
dr
Berechnung des Trägheitsmoments eines homogenen Zylinders.
R
r
Wir unterteilen den Zylinder in eine Serie von konzentrischen dünnwandigen Hohlzylindern mit Radius r und Dicke dr. Siehe Abb. 9.
Figur 9.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Berechnung des Trägheitsmoments eines starren Körpers
2prdr 2 Mr 3 dr
=
R2
pR 2
Das Trägheitsmoment dI des dünnwandigen Hohlzylinders mit
Radius r ist gleich
dI = r 2 dm = r 2 M
Das Trägheitsmoment des Zylinders ist die Summe der Trägheitsmomente der einzelnen Hohlzylinder mit Radius r:
3
r=R
r = R r dr
I D ( Zylinder) = Ú dI = 2 M Ú
=
r=0
r=0 R2
2 M r=R 3
2 M R4 1
r dr = 2
= MR 2
R 4 2
R 2 Úr = 0
=
Das Trägheitsmoment des Zylinders mit einem Radius r ist kleiner als
das eines Hohlzylinders mit demselben Radius, weil im Fall des
Zylinders sich auch Teilchen bei Radien r<R befinden, und diese
Teilchen tragen weniger zur Rotationsenergie bei, als wenn sie sich
beim Radius r=R befinden würden.
10.5.3 Trägheitsmoment einiger einfacher Körper
491
Für homogene Körper kann das Trägheitsmoment ausschliesslich aus
ihrer Geometrie abgeleitet werden. Wir fassen hier die Trägheitsmomente einiger einfacher Körper zusammen. Die Gesamtmasse des
Körpers ist M. Wir betrachten nur Rotationsachsen, die durch den
Schwerpunkt gehen.
Physik
492
Zylinder:
Radius R
Achse
I=
Achse
b
c
Achse
Länge l
MR 2 Ml 2
+
4
12
Radius R
I=
Ê a2 + b2 ˆ
I = MÁ
˜
Ë 12 ¯
Ein Quader (Parallelepiped mit rechten Winkeln):
MR 2
2
Die Bewegung starrer Körper
1.
2.
a
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
a
a
Dünner Stab:
Achse
l
Achse
b
b
Achse
Rechteckige Platte:
Berechnung des Trägheitsmoments eines starren Körpers
3.
4.
Länge l
Physik
Ê a2 + b2 ˆ
I = MÁ
˜
Ë 12 ¯
Ê b2 ˆ
I = MÁ ˜
Ë 12 ¯
Ê l2 ˆ
I = MÁ ˜
Ë 12 ¯
493
494
Hohlzylinder:
Achse
Radius R
Achse
I=
I=
MR 2
2
M ( R12 + R22 )
2
I = MR 2
Dünnwandiger Hohlzylinder (alias ein Ring):
Radius R
Kreisscheibe:
Die Bewegung starrer Körper
5.
6.
7.
innerer Radius R1
äusserer Radius R2
Achse
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Kugel:
Achse
Berechnung des Trägheitsmoments eines starren Körpers
8.
Radius R
10.5.4 Der Satz von Steiner
Vollkugel:
2 MR 2
I=
5
Dünnwandige Hohlkugel:
2 MR 2
I=
3
Die Trägheitsmomente bezüglich parallelen Achsen sind über eine
einfache Gleichung miteinander verbunden. Die Achse D sei eine
willkürliche Achse und DSP eine parallele Achse dazu, die durch den
Schwerpunkt des Körpers geht.
Satz von Steiner: Wenn a der Abstand zwischen den beiden
parallelen Achsen ist, gilt die folgende Beziehung:
I = I SP + Ma 2
wobei I und ISP die Trägheitsmomente des Körpers relativ zu
D und DSP sind und M die Masse des Körpers darstellt.
495
Der Beweis: Das Koordinatensystem xSP,ySP,zSP hat seinen Ursprung
im Schwerpunkt des Körpers. Wir wählen die Koordinatenachsen so,
dass y und ySP zusammenfallen und die z-Achse parallel zur Rotati-
Physik
496
Die Bewegung starrer Körper
onsachse D ist. Damit ist der Abstand eines beliebigen Punkts P des
Körpers bezüglich der Achse D:
r 2 = x 2 + ( y + a) 2
2
)
wobei x und y die Komponenten des Punkts bezüglich des Schwerpunkts sind. Das Trägheitsmoment bezüglich der Achse D ist gleich:
(
I = Â mR 2 = Â m x 2 + ( a + y )
= Â m( x 2 + a 2 + 2 ya + y 2 )
=  m( x 2 + y 2 ) + a 2  m + 2 a  my
Der erste Term ist das Trägheitsmoment bezüglich der Achse, die
durch den Schwerpunkt geht. Der letzte Term verschwindet wegen
der Definition des Schwerpunkts. Schliesslich,
I = Â m( x 2 + y 2 ) + a 2 Â m
= I SP + Ma 2
10.6 Rollender Körper
10.6.1 Die Rollbedingung
Ein rollender Körper rotiert um eine feste Achse, bewegt sich aber
gleichzeitig noch vorwärts. Es ist aber auch möglich, die Bewegung
eines rollenden Körpers als reine Drehbewegung zu behandeln (Siehe
Kap. 10.6.3). Wir diskutieren zuerst die erste Möglichkeit.
Wir betrachten die Bewegung eines Zylinders, der auf einer Fläche
rollt. Wenn der Zylinder rollt ohne zu gleiten, kann die Winkelge-
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Rollender Körper
schwindigkeit des Körpers einfach in Beziehung zur Geschwindigkeit seines Schwerpunkts gesetzt werden (Rollbedingung).
= Rw ¸
Ô
v SP ˝
R ˛Ô
für einen rollenden Körper (ohne zu gleiten)
Rollbedingung: Wenn der Körper sich ohne zu gleiten bewegt, gilt
v SP
w=
Siehe Abb. 10.
497
Figur 10. Die Beziehung zwischen der linearen Geschwindigkeit des
Schwerpunkts und der Winkelgeschwindigkeit um den Schwerpunkt, wenn
der Körper sich ohne zu gleiten bewegt.
Physik
498
Die Bewegung starrer Körper
10.6.2 Beschleunigung auf der schiefen Ebene
Demonstrationsexperiment: Schiefe Ebene.
Verschiedene Zylinder der gleichen Masse M, aber mit verschiedenen
radialen Masseverteilungen (d.h. verschiedenen Trägheitsmomenten) werden auf einer schiefen Ebene losgelassen. Wir beobachten die
Ankunftszeiten der Zylinder.
Die Zylinder werden losgelassen. Wenn die Zylinder auf der schiefen
Ebene rollen, erreichen sie nicht zur selben Zeit den Boden , d.h. die
Zylinder werden nicht gleich beschleunigt.
Figur 11. Schiefe Ebene: Verschiedene Zylinder der gleichen Masse aber mit
verschiedenen radialen Masseverteilungen werden losgelassen.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Rollender Körper
Figur 12. Masseverteilung der drei Zylinder: (a) Masse hauptsächlich im
Zentrum (b) homogene radiale Verteilung (c) Hohlzylinder (Ring).
Wir betrachten nun die Bewegung eines Zylinders, der auf einer
schiefen Ebene rollt. Siehe Abb. 13. Wir berechnen die Beschleunigung des Zylinders als Funktion seines Trägheitsmoments
1
1
2
Mv SP
+ I D,SPw 2 + Mgh
2
2
Die gesamte Energie eines Zylinders ist gleich
E=
499
wobei vSP die (lineare) Geschwindigkeit seines Schwerpunkts und w
seine Winkelgeschwindigkeit ist.
Physik
500
Die Bewegung starrer Körper
.
Figur 13. Schiefe Ebene mit Neigungswinkel a. Die vom Zylinder
zurückgelegte Strecke wird als x(t) bezeichnet.
Auf der schiefen Ebene wird die potentielle Energie der Zylinder in
kinetische Energie der Translation und der Rotation umgewandelt.
Die Beschleunigung hängt vom Trägheitsmoment des Zylinders ab. Je grösser das Trägheitsmoment des Zylinders ist,
desto kleiner ist die Beschleunigung.
I ˆ 2
1
1
1Ê
2
Mv SP
+ I D,SPw 2 = Á M + D,SP
˜v
2
2
2Ë
R 2 ¯ SP
Wir betrachten einen Körper, der sich auf einer schiefen Ebene befindet und der ohne zu gleiten rollt. Die gesamte kinetische (Translations- und Rotations-) Energie ist in diesem Fall gleich
E kin =
Die gesamte Energie des Körpers ist damit gleich
I ˆ 2
1Ê
E = E kin + Mgh = Á M + D,SP
˜ v + Mgh
2Ë
R 2 ¯ SP
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Rollender Körper
Die Bewegung starrer Körper
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
r
v SP
Die Geschwindigkeit jedes Punktes des Zylinders ist senkrecht zu der
direkten Verbindungslinie zwischen diesem Punkt und der momenta-
Der rollende Körper rotiert zu jedem Zeitpunkt um eine auf
der Zeichenebene senkrechten Drehachse durch den Berührungspunkt P.
Man kann sich eine Gerade vorstellen, die bei P senkrecht aus der
Zeichenebene herauskommt. Diese Gerade, d.h. die Berührungslinie
des rollenden Körpers, kann als eine momentane Drehachse
betrachtet werden.
P
Wir betrachten noch einmal einen Zylinder, der auf einer Ebene ohne
zu gleiten, rollt. Der Zylinder berührt die Ebene ständig beim Punkt
P.
10.6.3 Die momentane Drehachse eines rollenden
Körpers
502
Wenn wir diese Gleichung als Funktion der Zeit betrachten, erhalten
wir für eine schiefe Ebene (Siehe Abb. 13)
I ˆ 2
1Ê
E = Á M + D,SP
˜ v ( t) + Mg( H - x ( t)sin a ) = Konst.
2Ë
R 2 ¯ SP
Wenn die gesamte Energie konstant ist, wird die zeitliche Ableitung
der gesamten Energie verschwinden:
I ˆ d 2
d
dE 1 Ê
= Á M + D,SP
˜ (v ( t)) - Mg sin a x ( t)
dt
dt 2 Ë
R 2 ¯ dt SP
I ˆ
dv
1Ê
= Á M + D,SP
˜ 2v ( t) SP - Mg sin av SP ( t) = 0
dt
R 2 ¯ SP
2Ë
I ˆ
Ê
fi Á M + D,SP
˜ a - Mg sin a = 0
Ë
R 2 ¯ SP
Es folgt, dass die Beschleunigung des Schwerpunkts des rollenden
Körpers gleich
Mg sin a
< g sin a
aSP =
I D,SP ˆ
Ê
ÁM + 2 ˜
Ë
R ¯
ist. Wie erwartet nimmt die Beschleunigung des Körpers mit seinem
Trägheitsmoment ab und sie ist kleiner als gsina.
501
Der Wert gsina ist das Ergebnis, wenn wir die Rotationsenergie des
Körpers vernachlässigen.
Physik
Rollender Körper
nen Drehachse gerichtet und der Betrag ist proportional zum
Abstand:
P
Diese Beschreibung entspricht genau der Darstellung, dass
sich der Zylinder zu diesem Zeitpunkt um eine feste Achse
durch P mit der Winkelgeschwindigkeit w dreht. Man kann
deshalb sagen, dass der Zylinder zu jedem gegebenen Zeitpunkt nur eine Drehbewegung ausführt.
1
I w2
2 P
Was ist die kinetische Energie des Zylinders, wenn wir nur die Drehung betrachten? Diese entspricht nur einer Drehbewegung und ist
daher:
E kin =
I P = I SP + mR 2
503
wobei IP das Trägheitsmoment des Zylinders bezüglich P ist. Mit
dem Satz von Steiner können wir dieses Trägheitsmoment durch das
Trägheitsmoment des Zylinders bezüglich einer parallelen Achse
durch den Schwerpunkt ausdrücken:
Physik
504
Die Bewegung starrer Körper
Damit ist die kinetische Energie des Zylinders gleich:
E kin
1
1
= I w 2 = ( I + mR 2 )w 2
2 P
2 SP
1
1
I w 2 + mR 2w 2
2 SP
2
=
Wir bemerken, dass der Ausdruck wR genau die Geschwindigkeit des
Schwerpunkts ist! D.h.,
E kin
1
1
2
= I SPw 2 + m(wR)
2
2
1
1 2
I w 2 + mv SP
2 SP
2
=
Der erste Teil ergibt die Energie des Zylinders, als ob er nur eine
Rotation um seinen Schwerpunkt ausführen würde.
Der zweite Teil ist die Energie des Zylinders, wenn er nur eine
Translationsbewegung ausführen würde.
Wir können diese Gleichung, die wir aus einer reinen Drehbewegung
hergeleitet haben, so interpretieren:
1.
2.
Es folgt, dass wir uns die Bewegung des Zylinders in zwei unterschiedlichen Weisen vorstellen können. Das Ergebnis ist natürlich
von dieser Annahme unabhängig. Beide Darstellungen können verwendet werden.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Drehimpuls eines starren Körpers und Erhaltungsgesetz des Drehimpulses
10.7 Drehimpuls eines starren Körpers
und Erhaltungsgesetz des
Drehimpulses
i =1, N
Um den Gesamtdrehimpuls eines Teilchensystems bezüglich eines
Drehpunkts zu berechnen, muss man die Einzeldrehimpulse aller
Teilchen vektoriell addieren:
r r r
r
r
L = L1 + L2 + L3 + ... = Â Li
i =1, N
i
ÂL
r
Der Drehimpuls eines starren Körpers ist gleich dem Gesamtdrehimpuls der Teilchen des Körpers
r
L=
Erhaltungsgesetz: wie im Fall des einzelnen Teilchens (Siehe
Kap. 9.3), erwarten wir, dass das Drehmoment für die zeitliche Änderung des Drehimpulses verantwortlich ist:
r
r
dL
=M
dt
Wenn der starre Körper isoliert ist, oder wenn das resultierende Drehmoment verschwindet, bleibt der gesamte Drehimpuls des Körpers
konstant
r
r
M = 0 ¤ L = Konst.
505
Wir werden dieses Gesetz im nächsten Abschnitt experimentell überprüfen, und werden es in mehr Einzelheiten im Kap. 10.8 diskutieren.
Physik
506
Die Bewegung starrer Körper
10.7.1 Drehimpuls eines Velorads
Wir beginnen mit der Berechnung des gesamten Drehimpulses eines
Velorads.
Wir stellen uns vor, dass das Velorad aus einer Ansammlung von Teilchen der Masse m besteht, die mit masselosen Stäben verbunden sind.
Das Velorad wird deshalb als ein homogener Ring betrachtet.
Das Velorad wird als ein homogener Ring betrachtet.
Siehe Abb. 14.
Figur 14.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Drehimpuls eines starren Körpers und Erhaltungsgesetz des Drehimpulses
Der Drehimpuls der einzelnen Teilchen der Masse m ist gleich
r
Li = mRv i = mR( Rw ) = ( mR 2 )w
weil jedes Teilchen dieselbe Geschwindigkeit Rw und denselben
Radius R besitzt.
Die Bewegung starrer Körper
Es folgt, dass der gesamte Drehimpuls einfach gefunden wird. Der
Betrag des gesamten Drehimpulses ist gleich der Summe der Beträge
der Drehimpulse der einzelnen Teilchen.
Im Velorad ist die Richtung des Drehimpulses zur Winkelgeschwindigkeit parallel.
Der Drehimpuls kann schliesslich so ausgedrückt werden::
r
r
r
r
r
L = Â Li = Â ( mR 2 )w = ( MR 2 )w = I Dw
i =1, N
i =1, N
Wir erkennen einen Teil, der dem Trägheitsmoment des Velorads (des
Ringes) entspricht.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
w
Die Richtung des Drehimpulsvektors wird mit Hilfe der RechteHand-Regel gefunden. Wir bemerken, dass die Drehimpulsvektoren
der Teilchen parallel zueinander sind, weil
r
r r
r r
r
Li = mri ¥ v i = mri ¥ (w ¥ ri )
508
Demonstrationsexperiment: Drehimpulssatz mit Velorad
507
Siehe Abb. 15.
Figur 15. Der gesamte Drehimpuls des Velorads (des Ringes) ist zur
Winkelgeschwindigkeit parallel, weil die Drehimpulse der einzelnen
Teilchen parallel zueinander und zur Winkelgeschwindigkeit sind.
Physik
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Wir bemerken, dass gilt:
r r r r r r r
L = L1 + L2 = r1 ¥ p1 + r2 ¥ p2
r r
r
r
= r1 ¥ p1 + (- r1 ) ¥ (- p1 )
r r
= 2 r1 ¥ p1
Jede der beiden Massen der Hantel besitzt einen Drehimpuls. Der
Gesamtdrehimpuls ist gleich der vektoriellen Summe der beiden
Drehimpulse.
Wir betrachten nun ein einfaches Beispiel für einen rotierenden Körper, der nicht symmetrisch zur Rotationsachse aufgebaut ist. Wir nehmen eine langgestreckte Hantel, deren (masseloser) Verbindungsstab
unter einem Winkel a zur Rotationsachse liegt.
Im Fall des Velorads war die Masse symmetrisch um die Achse verteilt. Wenn das Velorad um seine Achse dreht, ist sein Drehimpuls zur
Achse parallel.
10.7.2 Drehimpuls einer Hantel
Die Person wird sich mit dem Drehimpuls 2LVelorad “nach rechts”
drehen.
Weil der gesamte Drehimpuls erhalten werden muss, folgt
r
r
r
r
r
r
r
Lnach = LPerson - LVelorad = Lvor = LVelorad fi LPerson = 2 LVelorad
Die Bewegung starrer Körper
2L
Drehimpuls eines starren Körpers und Erhaltungsgesetz des Drehimpulses
L
Der gesamte Drehimpuls ist gleich
r
r
r
Lnach = LPerson - LVelorad
L
Erhaltung des Drehimpulses.
510
Wir betrachten die Anordnung der Abb. 16 (links). Eine Person hält
ein Velorad.
Figur 16.
=0
Am Anfang dreht sich das Velorad um seine Achse “nach rechts”
(Siehe Abb. 16), so dass sein Drehimpuls nach oben zeigt. Der
gesamte Drehimpuls ist gleich
r
r
r
r
Lvor = LPerson + LVelorad = LVelorad
123
r
r
LVelorad Æ - LVelorad
509
Die Person wird jetzt die Achse der Rotation des Velorads so ändern,
dass der Drehimpuls des Velorads nach unten zeigt, d.h. das Velorad
dreht sich “nach links”. Der Drehimpuls des Velorads hat sich so verändert
Physik
r
r2
r
r1
r
p1
feste Drehachse
z
r
w
a
O
w
r r
r1 = r2 = l
Halbe Länge des Stabs: l
Drehimpuls eines starren Körpers und Erhaltungsgesetz des Drehimpulses
r
L
r
p2
Figur 17. Eine langgestreckte Hantel. Der Drehimpuls und der
Winkelgeschwindigkeitsvektor sind nicht parallel zueinander.
Der Betrag der Impulse der Massen ist gleich:
r
r
p1 = p2 = mv = m( rw ) = mlw sin a
511
Der Ortsvektor und der Impuls der einzelnen Massen sind senkrecht
zueinander. Der Betrag des Drehimpulses ist deshalb gleich:
r
L = 2( l)( mlw sin a ) = 2 ml 2w sin a
Physik
512
Die Bewegung starrer Körper
w
Wie im Fall des konischen Pendels (Siehe Kap. 9.5), dreht der Drehimpuls um die Drehachse:
r
feste Drehachse
w
r
L
a
O
Bei der rotierenden Hantel sind der Drehimpuls und der Winkelgeschwindigkeitsvektor nicht parallel.
Im Allgemeinen sind Drehimpuls und der Winkelgeschwindigkeitsvektor von nicht-symmetrischen Körpern nicht parallel.
10.8 Allgemeine Dynamik der starren
Körper
Die Bewegungsgleichung des Schwerpunkts eines Teilchensystems,
die natürlich auch für einen starren Körper gilt, haben wir schon
erwähnt (Siehe Kap. 7.9):
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Allgemeine Dynamik der starren Körper
r
r
r
dv
MaSP = M SP = Fext
dt
wobei Fext die resultierende äussere Kraft ist. Die Bewegung des
Schwerpunkts entspricht der Translationsbewegung des starren Körpers.
Wir betrachten nun den gesamten Drehimpuls. Wenn wir den starren
Körper als Teilchensystem betrachten, gilt
r
r
r
r r
dL
dL
= Â i = Â M = Â r ¥ Fi
dt i =1,N dt i =1,N i i =1,N i
wobei Mi das auf das Teilchen i wirkende Drehmoment ist.
i =1, N
i
i,int
(
)
)
i =1, N
i =1, N
Als wir im Kap. 7.9 von der Dynamik des Schwerpunkts eines Teilchensystems gesprochen haben, haben wir die resultierende Kraft, die
auf ein Teilchen wirkt, in interne und externe Kräfte unterteilt:
r
r
r
Fi = Fi,int + Fi,ext
i
Es folgt, dass das resultierende Drehmoment, das auf das Teilchen i
wirkt, so geschrieben werden kann
r
r r
r r
r r
r r
+ Fi,ext = Â ri ¥Fi,int + Â ri ¥Fi,ext
i
 r ¥ F =  r ¥(F
i =1, N
513
Wegen dem Aktion-Reaktion Gesetz nehmen wir an, dass die internen Kräfte zwischen Paaren von Teilchen wirken (Siehe Kap. 7.5).
Die Drehmomente solcher Paare kompensieren einander.
Siehe Abb. 18.
Physik
514
Teilchen i
Die Bewegung starrer Körper
ri
r1
1
r
F12 interne
r2
2
F21 interne
Figur 18. Das resultierende Drehmoment. Die durch innere Kräfte
ausgeübten Drehmomente von Paaren kompensieren einander.
Es folgt der Drehimpulssatz
r
r
r r
dL
= Â r ¥F = M ext
dt i =1,N i i,ext
wobei Mext das resultierende Drehmoment ist.
wobei Fext die resultierende äussere Kraft ist.
Translation des Schwerpunkts:
r
r
r
dp
= MaSP = Fext
dt
Zusammenfassend kann die Dynamik des starren Körpers durch zwei
Gleichungen bestimmt werden:
1.
2.
Rotation um eine Drehachse:
r
r
dL
= M ext
dt
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Drehung des starren Körpers um eine Hauptachse
nur für Hauptachsen
Wir bemerken, dass die Form der zwei Gleichungen nicht identisch
ist. Bei der Translationsbewegung finden wir die Beschleunigung des
Schwerpunkts. Im Fall der Rotation haben wir gesehen, dass die
Beziehung zwischen Drehimpuls und Winkelgeschwindigkeit nicht
immer trivial ist. Im nächsten Abschnitt werden wir die Spezialfälle
betrachten, bei denen die Form beider Gleichungen identisch ist,
nämlich:
r
r
r
Ï dp
= MaSP = Fext
ÔÔ dt
Ì r
r r
Ô dL
ÔÓ dt = I Da = M ext
10.9 Drehung des starren Körpers um
eine Hauptachse
Im Kap. 10.7 haben wir das folgende Resultat illustriert:
Im Allgemeinen sind der Drehimpuls und der Winkelgeschwindigkeitsvektor nicht parallel zueinander.
Es gibt Fälle, bei denen Drehimpuls und Winkelgeschwindigkeit parallel zueinander sind (z.B. wenn wir die Drehung
eines Velorads um seine Achse betrachten).
i =1, N
515
Man kann den allgemeinen Fall untersuchen, wenn man den Drehimpuls als die vektorielle Summe der einzelnen Drehimpulse betrachtet:
r r r
r
r
L = L1 + L2 + L3 + ... = Â Li
Physik
516
Die Bewegung starrer Körper
Wir haben gesehen, dass der einzelne Drehimpuls als Funktion der
Winkelgeschwindigkeit so ausgedrückt werden kann:
r
r r
r r
r
Li = mi ri ¥ v i = mi ri ¥ (w ¥ ri )
i =1, N
Damit ist der Gesamtdrehimpuls gleich:
r
r r
r
L = Â mi ri ¥ (w ¥ ri )
Wir verwenden ein kartesisches Koordinatensystem und schreiben:
r
r
r
r
r
r
r
r
w = w x ex + w y ey + w zez und ri = x iex + y iey + ziez
Wir fügen nun diese Komponenten im Kreuzprodukt ein und erhalten:
(
)
(
)
r r
r
r
r
w ¥ ri = w y zi - w z y i ex + (w z x i - w x zi )ey + w x y i - w y x i ez
und damit:
i
i
i z
i
i y i
x
)
i z
)
) (
(
) )
) )
i
i x i
y
r r
r r
r r
r r
r r
r
r
r
r ¥ (w ¥ r ) = ((w ¥ r ) y - (w ¥ r ) z )e - ((w ¥ r ) x - (w ¥ r ) z )e
(
)
((
((
(
r r
r r
r
+ (w ¥ ri ) y x i - (w ¥ ri ) x y i ez
r
= w x y i - w y x i y i - (w z x i - w x zi ) zi ex
r
- w x y i - w y x i x i - w y z i - w z y i z i ey
r
+ (w z x i - w x zi ) x i - w y zi - w z y i y i ez
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Drehung des starren Körpers um eine Hauptachse
((
((
(
(
(
(
)
) (
(
)
)
)
)
))
))
Wir vereinfachen den Ausdruck:
r r
r
r
ri ¥ (w ¥ ri ) = w x y i y i - w y x i y i - (w z x i zi - w x zi zi ) ex
r
- w x x i y i - w y x i x i - w y z i z i - w z z i y i ey
r
+ w x x - w x z - w y z - w y i y i ez
(
)
z
i
i
x
i
i
y
i
i
z
r
= w x y i2 - w y x i y i - w z x i zi + w x zi2 ex
r
+ -w x x i y i + w y x i2 + w y zi2 - w z zi y i ey
r
+ w z x i2 - w x x i zi - w y y i zi + w z y i2 ez
(
(
(
i
y
x
2
i
i
)
)
)
2
i
i
x
y
i i
i i
z i i
z
y
x
r
+ z ) - w x y - w x z )e
r
+ z ) - w x y - w z y )e
)
i i
Schliesslich können die Terme so gesammelt werden:
r r
r
r
ri ¥ (w ¥ ri ) = w x ( y i2 + zi2 ) - w y x i y i - w z x i zi ex
r
+ w y ( x i2 + zi2 ) - w x x i y i - w z zi y i ey
r
+ w z ( x i2 + y i2 ) - w x x i zi - w y y i zi ez
i =1, N
i =1, N
N
i =1,N
r
+ Â mi w z ( x i2 + y i2 ) - w x x i zi - w y y i zi ez
i
L = Â m (w ( y
+ Â m (w ( x
(
Der Gesamtdrehimpuls ist deshalb gleich:
r
2
2
Physik
517
518
Die Bewegung starrer Körper
oder
r
i =1, N
i =1, N
i
i
x
x
2
i
i i
2
i
y
y
2
i
i i
2
i
z
i i
z i i
x
y
r
L = Â m (w ( y + z ) - w x y - w x z )e
r
+ Â m (-w x y + w ( x + z ) - w z y )e
(
)
i =1,N
r
+ Â mi -w x x i zi - w y y i zi + w z ( x i2 + y i2 ) ez
(
(
(
i
 m (y
i =1, N
2
i
+ zi2 )
)
)
)
Der Gesamtdrehimpuls kann deshalb so geschreiben werden:
r
r
L = I xxw x + I xyw y + I xzw z ex
r
+ I yxw x + I yyw y + I yzw z ey
r
+ I zxw x + I zyw y + I zzw z ez
wobei
I xx =
i =1, N
I xy = - Â mi x i y i
i =1, N
I xz = - Â mi x i zi
Die anderen Terme können durch den Austausch xÆy, yÆz und zÆx
hergeleitet werden.
Die Beziehung zwischen Drehimpuls und Winkelgeschwindigkeit
kann in Matrixform ausgedrückt werden:
r
r
L = Iˆw
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
I xy
I yy
I zy
I xz ˆ
I yz ˜˜
I zz ¯˜
i
i =1, N
i i i
2
i
- Â mi y i zi
i =1, N
i =1, N
2
i
i =1, N
i =1, N
i
i =1, N
i i i
2
i
2
i
i i i
ˆ
-Â mx y
-Â mxz ˜
˜
 m (x + z ) -  m y z ˜
˜
 m ( x + y )¯˜
Drehung des starren Körpers um eine Hauptachse
wobei
Ê I xx
Iˆ = ÁÁ I yx
Á
Ë I zx
Ê
2
2
Á Â mi ( y i + zi )
Á i =1,N
= Á - Â mi x i y i
Á i =1,N
Á - Â mi x i y i
Ë i =1,N
eine symmetrische Matrix ist, die als Trägheitstensor bezeichnet
wird.
Die Beziehung zwischen Winkelgeschwindigkeit und Drehimpuls ist
nicht trivial.
Wir werden uns nicht mit den allgemeinen Fällen beschäftigen und
immer nur Drehungen um spezielle Achsen der starren Körper, die
sogenannten Hauptachsen, betrachten.
Wir beginnen mit der folgenden Bemerkung:
519
Wenn das Koordinatensystem so gewählt wird, dass die Masseverteilung um eine Achse symmetrisch ist, werden die nichtdiagonalen Terme verschwinden.
Physik
520
Die Bewegung starrer Körper
Ê I xx
Iˆ = Á I yx
Á
Á
Ë I zx
m
m
I xy
I yy
I zy
i i i
y
I xz ˆ Ê I xx
I yz ˜ = Á 0
˜ Á
I zz ¯˜ ËÁ 0
0
I
0
yy
i =1, N
0ˆ
0˜
˜
I zz ¯˜
i i i
)
i =1, N
i i i
Âmxy = Âmxz = Âmyz
i =1, N
=0
Betrachte z.B. eine solche Situation: die nicht-diagonalen Elemente
des Trägheitstensors verschwinden:
z
x
In diesem Fall
und
(
r
r
r
r
L = ( I xxw x )ex + I yyw y ey + ( I zzw z )ez
w x π 0 und w y = w z = 0
Die Winkelgeschwindigkeit zeigt in die Richtung einer der Achsen. Z.B.
Wir unterscheiden zwei Fälle:
1.
Es folgt:
r
r
r
r
L = ( I xxw x )ex = I xx (w x ex ) ∫ I Dw
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
und die Winkelgeschwindigkeit und der Drehimpuls sind parallel
zueinander.
Die diagonalen Elemente des Trägheitstensors sind gleich:
Drehung des starren Körpers um eine Hauptachse
2.
I xx = I yy = I zz ∫ I
(
)
In diesem Fall
r
r
r
r
r
L = I (w x ex ) + I w y ey + I (w zez ) = Iw
wieder sind die Winkelgeschwindigkeit und der Drehimpuls parallel zueinander.
In der Mathematik kann man beweisen, dass durch eine Basistransformation eine beliebige symmetrische Matrix in eine diagonale
Matrix transformiert werden kann. Es folgt:
Für einen beliebigen Körper gibt es immer mindestens ein
Koordinatensystem (d.h. drei zueinander senkrechte Achsen),
relativ zu welchen der Trägheitstensor diagonal ist.
Wir wenden diese Eigenschaft an und folgern:
Für jeden Körper gibt es mindestens drei zueinander senkrechte Richtungen, für die der gesamte Drehimpuls parallel
zur Winkelgeschwindigkeit ist, falls die Rotation um eine dieser Achsen erfolgt.
521
Diese Achsen heissen die Hauptträgheitsachsen (oder
Hauptachsen).
Für die Rotation um eine Hauptachse gilt
r
r
L = I Dw
Rotation um Hauptachsen
Physik
522
Die Bewegung starrer Körper
wobei ID das Trägheitsmoment bezüglich der betrachteten Hauptachse, L der gesamte Drehimpuls des Körpers und w die Winkelgeschwindigkeit um die Achse ist.
In diesem Fall (Drehimpuls und Winkelgeschwindigkeit parallel)
kann der Drehimpulssatz so geschrieben werden
r
r
r
r r
dw
dL d
= I Da = M ext
= (I w ) = ID
dt
dt dt D
wobei a die Winkelbeschleunigung ist. Zusammenfassend haben wir
die zweite Newtonsche Gleichung der Drehbewegung gefunden:
r
r r
dL
= I Da = M ext
dt
Die Beziehung gilt nur, wenn die Vektoren L und w parallel zueinander sind!
Diese Formel kann mit dem zweiten Newtonschen Gesetz verglichen
werden:
r
r r
dp
= ma = Fext
dt
wobei wir beobachten, dass das Trägheitsmoment die Rolle der (trägen) Masse spielt, der Drehimpuls die des linearen Impulses und das
Drehmoment die der Kraft. Das fundamentale Newtonsche Gesetz
wurde umformuliert!
10.9.1 Anwendung: Rotation eines Yoyos
Wir betrachten ein Garn, das um die Achse eines Yoyos aufgewickelt
ist. Das Yoyo besteht aus zwei identischen Zylindern und einem
koaxial dazwischen geklebten kleineren Zylinder. Wir wollen bewei-
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Drehung des starren Körpers um eine Hauptachse
sen, dass das Drehmoment und nicht nur die Kraft für die Drehung
verantwortlich ist.
Demonstrationsexperiment: Garnrolle
Wir ziehen an der Schnur mit einer konstanten Kraft. Der Winkel der
Schnur bezüglich des horizontalen Tischs wird geändert. Wir beobachten die Drehung des Yoyos.
Dass die Drehbewegung mit dem Drehmoment verknüpft ist, kann
man in der folgenden Weise demonstrieren: (Siehe Abb. 19).
1.
2.
3.
523
Wir ziehen das Garn so, dass das Drehmoment bezüglich der
Drehachse in die Zeichenebene hinein geht. Das Yoyo dreht sich
nach rechts und das Garn wird um das Yoyo aufgewickelt.
Wir ziehen das Garn so, dass das Drehmoment bezüglich der
Drehachse aus der Zeichenebene heraus geht. Das Yoyo dreht sich
nach links und das Garn wird sich abwickeln.
Wir ziehen das Garn so, dass das Drehmoment bezüglich der
Drehachse verschwindet. Das Yoyo gleitet auf dem Tisch ohne zu
rotieren.
Physik
524
Die Bewegung starrer Körper
r
F
F
Drehmoment verschwindet
r
Drehmoment geht
Yoyo dreht nicht
Drehachse
in Blattebene hinein
F
r
Drehmoment geht
aus Blattebene heraus
Yoyo dreht nach links
Das Drehmoment ist für die Drehbewegung verantwortlich.
Yoyo dreht nach rechts
Figur 19.
10.9.2 Atwoodsche Maschine mit massiver Rolle
Eine homogene Scheibe mit Radius R und Masse M kann frei um eine
fixierte horizontale Achse rotieren, die durch ihren Mittelpunkt geht.
Eine Masse m wurde an einem Seil aufgehängt. Das Seil wird auf den
Umfang der Scheibe gewickelt. Siehe Abb. 20.
Die Kraft im Seil wird als F bezeichnet.
mg - F = ma
Die Bewegungsgleichung der Masse m ist:
Die Bewegungsgleichung der Scheibe ist:
Ia = M ext = FR
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Drehung des starren Körpers um eine Hauptachse
I=
r
mg
MR 2
2
Atwoodsche Maschine mit massiver Rolle.
r
F
r
-F
Das Trägheitsmoment der Scheibe ist:
Figur 20.
a = Ra
Drehachse
Ia MR 2a MRa Ma
=
=
=
R
2R
2
2
525
Wenn das Seil immer gespannt ist, gilt die folgende Beziehung zwischen Winkelbeschleunigung und linearer Beschleunigung:
F=
Schliesslich erhalten wir:
Physik
526
Die Bewegung starrer Körper
mg - F = ma fi
Die Beschleunigung ist damit:
oder
mg -
Ma
= ma
2
mg
fi a =
<g
Mˆ
Ê
Ám + ˜
Ë
2¯
Die erhaltene Beschleunigung a ist kleiner als die, die ein frei fallender Körper (d.h. a=g) spüren würde. Die Trägheit der Scheibe bremst
die Masse m.
10.9.3 Fallende massive Scheibe
Wir bestimmen die Winkelbeschleunigung und die Abwärtsbeschleunigung des Schwerpunkts der folgenden aufgehängten Scheibe mit
Radius R und Masse M. Siehe Abb. 21.
Gleichung der Drehbewegung: Die Drehachse ist eine Hauptachse:
Mg - F = MaSP
Gleichung der Translationsbewegung (die positive Richtung wird
nach unten gewählt):
Wir betrachten die Translation des Schwerpunkts der Scheibe und die
Drehung um eine Drehachse, die durch den SP geht.
1.
2.
I SPa = M ext
wobei das resultierende Drehmoment bezüglich der Drehachse
berechnet werden muss. Wir finden:
M ext = FR - ( Mg)(0) = FR
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
aSP = Ra
SP
r
Mg
Fallende massive Scheibe.
r
F
Drehachse
527
wobei wir bemerken, dass die Gravitationskraft kein Drehmoment
auf die Scheibe bewirkt bezüglich der Drehachse durch den SP.
Rollbedingung: Wenn der Faden nicht auf der Scheibe gleitet, gilt:
Drehung des starren Körpers um eine Hauptachse
3.
Figur 21.
Ï Mg - F = MRa
Ì
ÓI SPa = FR
Wir setzen diese Gleichungen zusammen und erhalten:
Physik
528
Die Bewegung starrer Körper
1
MR 2
2
1
1
MRa = MaSP
2
2
I SP =
Das Trägheitsmoment der Scheibe ist:
d.h.
F=
Mg -
und a =
1
MRa = MRa
2
2
g< g
3
2
g
3R
Wenn wir die Kraft F aus dem vorigen Gleichungssystem eliminieren, erhalten wir:
oder
a=
Die Beschleunigung ist kleiner als die beim freien Fall. Die Drehung
der Scheibe bremst den Fall. Die Beschleunigung ist unabhängig von
der Grösse und Masse der Scheibe.
Die Unabhängigkeit von der Masse kann man verstehen, wenn man
bemerkt, dass das resultierende Drehmoment und das Trägheitsmoment zur Masse proportional sind. Je massiver die Scheibe ist, desto
grösser ist das Drehmoment, aber desto grösser ist auch der Effekt der
Trägheit der Scheibe.
Die Unabhängigkeit vom Radius der Scheibe wird so erklärt. Das
Trägheitsmoment nimmt mit dem Quadrat des Radiuses zu. Das
Drehmoment nimmt proportional zum Radius zu. Als Folge nimmt
die Winkelbeschleunigung mit dem inversen Radius ab. Aus geometrischen Gründen ist die Beschleunigung des Schwerpunkts gleich
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Drehung des starren Körpers um eine Hauptachse
der Winkelbeschleunigung mal den Radius, d.h. die Beschleunigung
des Schwerpunkts ist vom Radius unabhängig.
10.9.4 Das physikalische Pendel
Das physikalische Pendel ist ein wichtiges Beispiel für die Bewegung
eines starren Körpers. Man versteht darunter jeden starren Körper,
der unter der Wirkung der Gravitationskraft frei um eine feste horizontale Achse schwingen kann.
b
Schwerpunkt
Drehachse
Wir betrachten die folgende Anordnung, wobei SP der Schwerpunkt
des Körpers ist. Der Abstand des Schwerpunkts von der Schwingungsdrehachse wird als b bezeichnet.
q
r
mg
529
Das Trägheitsmoment bezüglich der Schwingungsdrehachse wird als
I bezeichnet.
Physik
530
Die Bewegung starrer Körper
Das Drehmoment bezüglich der Drehachse kann so ausgedrückt werden, wobei der Winkel q in der Abb. definiert wurde:
d 2q
dt 2
M = - mgb sin q
a=
Die Winkelbeschleunigung ist:
r r
M || w
r
w
d
M =I
dt
d 2q
= - mgb sin q
dt 2
d .h .
Mit dem zweiten Newtonschen Gesetz für die Drehbewegung erhalten wir:
oder
M = Ia = I
Für kleine Schwingungen kann die übliche Näherung durchgeführt
werden (Siehe Kap. 5.5):
d 2q
mgb
ªq
dt 2
I
Das Trägheitsmoment muss zur Masse proportional sein. Wir schreiben:
I ∫ mK 2
wobei K als Trägheitsradius des Körpers bezeichnet wird. Damit:
d 2q gb
+
q=0
dt 2 K 2
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Drehung des starren Körpers um eine Hauptachse
gb
K2
fi
T = 2p
Drehachse
K2
gb
Die Lösung ist eine harmonische Schwingung mit der Periode:
w2 =
Beispiel: ein aufgehängter Ring mit Radius R.
R
Schwerpunkt
I SP = mR 2
Sein Trägheitsmoment bezüglich des Zentrums des Rings ist:
Mit dem Satz von Steiner:
I = I SP + mR 2 = 2 mR 2
K 2 = 2R 2
d.h. das Quadrat des Trägheitsradiuses ist gleich:
Physik
531
532
Die Bewegung starrer Körper
2R 2
2R
= 2p
gR
g
Wir erhalten damit die Periode T:
T = 2p
10.9.5 Schiefe Ebene (Lösung mit Kräften)
Wir betrachten nun die Bewegung eines Zylinders, der auf einer
schiefen Ebene rollt ohne zu gleiten. Siehe Abb. 13.
Was ist die Beschleunigung des Zylinders als Funktion seines Trägheitsmoments?
b
r
Mg
SP
r
N
r
FR
Im Kap. 10.6.2 wurde das Problem mit dem Energiesatz gelöst. Hier
wollen wir das Konzept des Drehmoments verwenden. Wir zeichnen
die Kräfte, die auf den Zylinder wirken:
1.
2.
3.
Die Gravitationskraft des Zylinders
Die von der Ebene ausgeübte Normalkraft
Die Reibungskraft zwischen dem Zylinder und der Ebene. Ohne
diese Kraft würde der Zylinder nicht rollen, er würde auf der
schiefen Ebene gleiten.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Drehung des starren Körpers um eine Hauptachse
RFR = I SPa
Wir bemerken, dass die Gravitationskraft kein Drehmoment
bezüglich der Drehachse durch den SP bewirkt.
Rollbedingung: Der Zylinder rollt ohne zu gleiten:
533
Gleichung der Drehbewegung: Die Drehachse ist eine Hauptachse,
die durch den Schwerpunkt geht:
Mg sin b - FR = MaSP
Gleichung der Translationsbewegung entlang der Ebene (die positive Richtung wird abwärts gewählt):
Wir schreiben nun die Bewegungsgleichungen:
1.
2.
3.
aSP = Ra
I SP aSP
= MaSP
R2
g sin b
Mg sin b
aSP =
=
I
I
Ê
ˆ
Ê
ˆ
Á1 + SP 2 ˜ Á M + SP2 ˜
Ë
MR ¯ Ë
R ¯
Mg sin b -
Ï Mg sin b - FR = MaSP
I SPa
ÔÔ
ÌFR =
R
Ô
ÓÔaSP = Ra
Das Gleichungssystem ist damit:
Wir erhalten:
oder
Physik
534
Die Bewegung starrer Körper
¤
Im Fall des Zylinders gilt:
I SP
MR 2
=
2
Mg sin b
2
a =
= g sin b
SP
Ê
MR 2 ˆ 3
˜
ÁM +
2R 2 ¯
Ë
I SP aSP
R2
Der Betrag der Reibungskraft ist gleich:
FR =
MR 2 2
g sin b
sin b
Mg
2 3
=
3
R2
Im Fall des Zylinders erhalten wir:
FR =
r
Mg
r
N
momentane Drehachse
r
FR
Zweite Methode: wenn wir die Reibungskraft nicht berechnen wollen, können wir einen anderen Drehpunkt verwenden. Wir haben im
Kap. 10.6.3 gesehen, dass man als momentane Drehachse den Berührungspunkt annehmen kann:
b
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Die Kreiselbewegung
Bezüglich der momentanen Drehachse verschwinden die Drehmomente der Normalkraft und der Reibungskraft. Das Drehmoment der
Gravitationskraft ist gleich:
M ext = RMg sin b
I P aSP
R
Die Beziehung zwischen Winkelbeschleunigung und Drehmoment
liefert:
RMg sin b = I Pa =
Das Trägheitsmoment bezüglich des momentanen Drehpunkts kann
mit Hilfe des Satzes von Steiner (Siehe Kap. 10.5.4) als Funktion des
Trägheitsmoments bezüglich des SPs ausgedrückt werden:
a
a
SP
= ( I SP + MR 2 ) SP
R
R
+ MR )
RMg sin b = I P
oder, wie erwartet
SP
R 2 Mg sin b
Mg sin b
aSP =
=
2
I
Ê
ˆ
Á SP + M ˜
¯
Ë R2
(I
10.10 Die Kreiselbewegung
535
Der Drehimpulssatz impliziert, dass der Drehimpuls eines Körpers in
Abwesenheit eines äusseren Drehmoments konstant bleibt. Wenn der
Körper um eine Hauptachse rotiert, so dass
r
r
L = I Dw
Physik
536
Die Bewegung starrer Körper
dreht er sich immer weiter mit konstanter Winkelgeschwindigkeit um
diese Achse.
Diese Tatsache wird am besten durch den Kreisel illustriert. Der
Kreisel besteht aus einem sich drehenden Rad, dessen Achse unbehindert sich ändern kann.
Wenn das Drehmoment auf den Kreisel nicht verschwindet,
erfährt der Drehimpuls in der Zeit Dt eine Veränderung, die
durch
r r
DL = MDt
gegeben ist, wobei M der Drehmomentvektor ist.
Genauso wie die Impulsänderung eines Teilchens immer in Richtung
der Kraft ist, ist die Änderung des Drehimpulses immer in Richtung
des Drehmoments.
Wenn das Drehmoment senkrecht zum Drehimpuls ist, ist die
Änderung auch senkrecht zum Drehimpuls, und der Drehimpuls ändert seine Richtung, nicht aber seinen Betrag.
D.h., die Rotationsachse ändert ihre Richtung, aber der Betrag des
Drehimpulses bleibt konstant:
Die Bewegung der Drehachse um eine feste Achse als Folge
eines äusseren Drehmoments wird als Präzession bezeichnet.
10.10.1 Horizontale Präzession des Velorads
Wir betrachten einen langen Stab, der sich frei bewegen kann. Ein
Kreisel wird mit Hilfe eines Velorads gebaugt. Das Velorad ist an
einem Ende des langen Stabs (Achse des Velorads) so befestigt, dass
es um diese Achse rotieren kann.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Die Kreiselbewegung
Demonstrationsexperiment: Präzession des Velorads
Das Velorad wird beschleunigt. Die Achse liegt in der horizontalen
Ebene. Ein Gewicht wurde aufgehängt. Wir beobachten die Präzession der Achse des Velorads.
l
Wir beobachten, dass die Präzession mit konstanter Geschwindigkeit
erfolgt. Wir definieren:
537
Die Winkelgeschwindigkeit der Präzession W wird definiert
als die Winkeländerung pro Zeiteinheit mit der die Achse
rotiert.
Physik
538
w
Die Bewegung starrer Körper
r
L
r
mg
fi
l
r
M
W
DL
Dq
=L
= LW
Dt
Dt
Der Drehimpuls des Velorads zeigt immer in die horizontale Richtung. Wenn das Velorad seine Präzession durchführt, dreht sich der
Drehimpuls gleichzeitig um die vertikale Achse. Die Änderung des
Drehimpulses kann so ausgedrückt werden:
r r
DL = L Dq fi DL = LDq
oder
r r
DL = L Dq
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Die Kreiselbewegung
W
Dq
r
L ( t + Dt)
r
L ( t)
r
L ( t + Dt)
r
L ( t)
r
DL
Um die Ursache der Präzession zu diskutieren, müssen wir nun das
Drehmoment der Gravitationskraft analysieren. Es liegt in der Ebene
der Präzession und wie erwartet, ist es für die zeitliche Änderung des
Drehimpulses verantwortlich:
r
r
dL
= M
fi LW = lmg
dt
lmg lmg
=
L
Iw
Der Drehimpuls des Velorads kann mit Hilfe seines Trägheitsmoments dargestellt werden und wir erhalten:
W=
539
Wir bemerken, dass diese Beziehung voraussagt, dass die Präzessionsgeschwindigkeit mit der inversen Winkelgeschwindigkeit des Velorads abnimmt. Wegen der Reibung wird das Velorad gebremst, und
wir werden deshalb beobachten, dass die Präzession beschleunigt
wird. Die Präzessionsgeschwindigkeit kann natürlich nicht nach
unendlich gehen. Allmählich wird das Velorad nicht mehr eine Prä-
Physik
540
Die Bewegung starrer Körper
zession durchführen, sondern eine komplizierte und nicht-stabile
Bewegung erfahren.
10.10.2 Allgemeine Präzession
W
Wir haben im letzten Abschnitt den Fall betrachtet, bei dem das Velorad in der Ebene der Präzession bleibt. Im Allgemeinen kann das Velorad einen Winkel mit der vertikalen Richtung besitzen:
f
Länge des Stabes: l
Wegen des Drehmoments der Gravitationskraft wird der Kreisel eine
Präzession durchführen. Die vertikale Komponente des Drehimpulses
wird erhalten. Die radiale Komponente des Drehimpulses wird sich
drehen. Wir erhalten deshalb:
r
dL
= L sin fW
dt
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Die Kreiselbewegung
r
M = mgl sin f
r
r
dL
= M = L sin fW = mgl sin f
dt
Das Drehmoment ist gleich:
Damit:
oder
mgl mgl
W=
=
L
Iw
d.h. die Präzessionsgeschwindigkeit ist unabhängig vom Neigungswinkel f.
10.10.3 Präzession “ohne Drehimpuls”1
Wir haben gesehen, dass die Präzession eine einfache Folgerung des
Drehimpulssatzes ist. Mit Hilfe des Konzeptes des Drehmoments und
des Drehimpulses kann die Präzession erklärt werden. Trotzdem ist
die Bewegung des Kreisels oft nicht einfach intituiv zu verstehen2.
Wir erinnern uns daran, dass der Drehimpulssatz eine Umformulierung des Newtonschen Gesetzes für den Fall der Drehbewegung ist:
diese Umformulierung entspricht keiner neuen Physik. Deshalb soll
die Bewegung des Kreisels ebenso mit Hilfe des zweiten Newtonschen Gesetzes beschrieben werden.
541
1. Wurde in der Vorlesung nicht behandelt, und nach der Vorlesung als Folge der Fragen der
Studenten eingefügt.
2. Den Studenten ist das Newtonsche Gesetz dp/dt=F=ma oft viel eher intituiv zugänglich,
als der Satz dL/dt=M=Ia, obwohl beide ähnliche Physik enthalten!
Physik
542
Die Bewegung starrer Körper
Wir betrachten einen vereinfachten Kreisel, nämlich einen starren
Körper mit zwei identischen Massen, die sich um eine Achse drehen
(Siehe Abb. 22). Die zwei Massen sind durch einen (masselosen)
starren Stab der Länge 2l verbunden.
r
F
r
L
w
l
r
v
r
M
Wir nehmen nun an, dass ein Drehmoment, wie in der Abb. gezeigt
wird, auf das System wirkt und zeigen, dass als Folge davon der Drehimpuls sich in Richtung des Drehmoments ändern wird.
r
v
l
r
F
Figur 22. Vereinfachter Kreisel: die Kreisbewegung zweier identischer
Massen um eine Achse. Ein Drehmoment in der Ebene entspricht den zwei
Kräften, die gezeigt sind: eine nach oben, und eine nach unten.
Die Massen bewegen sich mit konstanter Geschwindigkeit v auf
einem Kreis. Der Effekt des Drehmoments kann durch Kräfte, die auf
die Massen wirken, interpretiert werden. Wenn das Drehmoment in
die Richtung wie in der Abb. zeigt, sind diese Kräfte in entgegengesetzter Richtung gerichtet: eine Kraft wirkt nach oben, die andere
nach unten. Die vektorielle Summe der Kräfte verschwindet, d.h. die
Rotationsachse wird sich drehen, aber der Schwerpunkt des Systems
wird nicht beschleunigt.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Die Kreiselbewegung
Wir nehmen an, dass das Drehmoment während eines Zeitintervalls
Dt wirkt. Während dieses Zeitintervalls ist die Änderung der
Geschwindigkeit jeder Masse gleich:
r
m Dv = Dp = FDt
r
F
Df ª
Df
Dv FDt
=
v
mv
w
r
DL
r
L
r
M
r
Dv
543
Die Änderungen der Geschwindigkeiten der Massen zeigen in entgegengesetzte Richtungen. Weil die Änderungen senkrecht zu den
Geschwindigkeiten sind, werden nur die Richtungen und nicht die
Beträge der Geschwindigkeitsvektoren geändert. Als Folge der
Geschwindigkeitsänderung wird die Drehachse um einen Winkel Df
abgelenkt (Siehe Abb. 23). Es gilt:
r
Dv
r
F
Figur 23. Die Ebene der Bewegung dreht sich, und die Änderung des
Drehimpulses zeigt in die Richtung des Drehmoments.
Physik
544
Die Bewegung starrer Körper
r
FDt 2 lFDt M Dt
=
= r
mv
2 lmv
L
Das Drehmoment und der Drehimpuls sind gleich:
r
r
M = 2 lF
und L = 2 lmv
Damit:
Df =
Die Präzessionsrate ist deshalb gleich:
r
Df M
= r
Dt
L
W=
Dieses Ergebnis ist natürlich dasselbe, wie das im vorherigen
Abschnitt gefundene.
In diesem Beispiel haben wir gezeigt, dass die Änderung des Drehimpulses senkrecht zu den Kräften zeigt. Diese Beobachtung erklärt,
warum Drehmoment und Drehimpuls mit Hilfe des Kreuzproduktes
definiert werden.
10.10.4 Der Kreiselkompass
In einem Kreiselkompass wird der Kreisel so angeordnet, dass seine
Achse sich frei im Raum drehen kann. Der Kreisel wurde auf eine
hohe Winkelgeschwindigkeit beschleunigt. Wir sind an der Bewegung der Achse interessiert, wenn wir den Kreisel zu verdrehen versuchen.
Demonstrationsexperiment: Kreiselkompass
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Die Kreiselbewegung
Nachdem der Kreisel einmal beschleunigt wurde, liegt seine Orientierung fest, seine Achse zeigt in eine bestimmte Richtung. Langsam
üben wir eine Kraft auf einen der vertikalen schwarzen Stäbe des
Kreisels aus, um das System zu rotieren (Siehe Abb. 24).
Wir beobachten: Wenn man den Kreisel in der horizontalen Ebene
dreht, wird die Achse des Kreisels zur Senkrechten hin gedreht; der
Kreisel versucht seine Achse parallel zum Vektor der aufgezwungenen Rotation auszurichten.
545
Figur 24. Kreiselkompass: wenn man den Kreisel in der horizontalen Ebene
rotiert, wird die Achse des Kreisels zur Senkrechten hin gedreht. Der
Kreisel versucht seine Achse parallel zu der aufgezwungenen Rotation
auszurichten.
Physik
546
Die Bewegung starrer Körper
r
M
r
F
Drehmoment
r
L
r
DL
Diese Beobachtung kann leicht mit Hilfe des Konzeptes des Drehmoments erklärt werden: wenn man den Kreisel in der Ebene im Gegenuhrzeigersinn rotiert, zeigt das resultierende Drehmoment nach oben.
Der Drehimpuls wird daher nach oben gedreht (Siehe Abb. 25)
r
F
Figur 25. Kreiselkompass: wenn man den Kreisel in der horizontalen Ebene
im Gegenuhrzeigersinn rotiert, zeigt das resultierende Drehmoment nach
oben. Der Drehimpuls wird nach oben gedreht.
10.11 Gleichgewicht der starren
Körper (Statik)
Ein starrer Körper befindet sich im mechanischen Gleichgewicht,
wenn er weder eine beschleunigte translatorische Bewegung noch
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Gleichgewicht der starren Körper (Statik)
eine Rotationsbewegung ausführt. Das bedeutet, dass sowohl die
lineare Beschleunigung des Schwerpunkts des Körpers als auch die
Winkelbeschleunigung um eine beliebige feste Achse verschwinden
müssen.
i
und
j
ÂM
j
=0
Wenn wir ein System von Massen betrachten und die Kräfte analysieren, die auf diese Massen wirken, können wir die Bedingung des
Gleichgewichts als Funktion der resultierenden Kraft und des resultierenden Drehmoments bezüglich einer festen Drehachse so ausdrücken:
r
r
i
ÂF = 0
10.11.1 Mann auf einer Leiter
Eine lange Leiter der Länge l mit einer Masse M wird an eine Wand
gelehnt, so dass das obere Ende der Leiter eine Höhe h über dem
Boden hat. Der Schwerpunkt der Leiter befindet sich auf einem Drittel dieser Höhe h. Ein Mann der Masse m steht in halber Höhe auf der
Leiter. Die Wand ist reibungsfrei. Der Boden ist nicht reibungsfrei.
Welche Kräfte übt das System (Mann und Leiter) auf die Wand und
auf den Boden aus?
Siehe Abb. 26.
Wir betrachten die Kräfte, die im System wirken:
1.
2.
547
Die Wand ist reibungsfrei, d.h. das obere Ende der Leiter kann nur
eine zur Wand senkrechte Kraft spüren.
Der Boden ist nicht reibungsfrei, d.h. es können von der Leiter
Kraftkomponenten in vertikaler und horizontaler Richtung ausgeübt werden.
Physik
548
Mann auf einer Leiter.
Die Bewegung starrer Körper
Figur 26.
Länge l
Höhe h
Die Kraft F1, die der Boden auf die Leiter ausübt. Wir bemerken,
dass diese Kraft nicht entlang der Leiter wirken muss!
Die Gravitationskraft der Leiter. Sie greift am Schwerpunkt der
Leiter an.
Die Gravitationskraft des Manns.
Die Kraft F2, die die Wand auf die Leiter ausübt.
Wir zeichnen nun die Kräfte, die auf das System wirken:
1.
2.
3.
4.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
r
mg
Gleichgewicht der starren Körper (Statik)
r
F1
r
Mg
d
r
F2
h
Wir wählen das Koordinatensystem so, dass die y-Achse längs der
Wand nach oben zeigt. Der Ursprung des Koordinatensystems liegt in
der Ecke zwischen Wand und Boden.
ÏF1x + F2 x = 0
¤ Ì
ÓF1y + 0 - ( M + m) g = 0
Die Gleichgewichtsbedingung für die Kräfte sieht in vektorieller
Form und in Komponenten so aus:
r r
r
r
F1 + F2 + Mg + mg = 0
549
Für die Bestimmung der Drehmomente müssen wir eine Drehachse
wählen. Wir nehmen eine Drehachse, die durch den Auflagepunkt der
Leiter auf dem Boden geht. Eine positive Drehung ist im Uhrzeiger-
Physik
550
Die Bewegung starrer Körper
sinn gewählt. Mit dieser Wahl verschwindet das Drehmoment der
erhalten:
Kraft
F1. Wir
d
d
(F2x )(h) - ( Mg)ËÁÊ 3¯˜ˆ - (mg)ËÁÊ 2 ¯˜ˆ = 0
Wir haben ein Gleichungssystem mit drei Gleichungen und drei
Unbekannten:
Ï
ÔF + F = 0
1x
2x
ÔÔ
ÌF1y = ( M + m) g
Ô
ÔF h - ÁÊ Md + md ˜ˆ g = 0
2x
Ë 3
2 ¯
ÓÔ
Wie erwartet, muss die vertikale Komponente der Kraft, die der
Boden auf die Leiter ausübt, die Gravitationskraft des Systems MannLeiter kompensieren. Diese Bedingung gilt, weil wir die Wand als
reibungsfrei angenommen haben:
F1y = ( M + m) g
Die zweite Bedingung für das Gleichgewicht ist:
Ê dˆ Ê M mˆ
F2 x = - F1x = Á ˜ Á + ˜ g
Ë h¯ Ë 3 2 ¯
d.h. die horizontale Kraft, die der Boden auf die Leiter ausübt, muss
proportional zum Abstand d sein, und nimmt mit der inversen Höhe
ab. Die Kraft, die die Wand auf die Leiter ausübt, ist identisch aber
wirkt in entgegengestetzer Richtung.
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Gleichgewicht der starren Körper (Statik)
Nach dem dritten Newtonschen Gesetz treten an der Berührungsstelle
zweier Körper immer zwei Kräfte auf. Die von der Wand und vom
Boden auf die Leiter übertragenen Kräfte sind deshalb genau so gross
wie die von der Leiter auf die Wand und auf den Boden ausgeübten
Kräfte, aber in entgegengesetzter Richtung.
10.11.2 Balken mit Drehgelenk
Ein Balken wird mit einem Drehgelenk an einer Wand befestigt und
mit Hilfe eines Seils am anderen Ende so gespannt, dass er unter
einem Gewicht m, das an diesem Ende angehängt wird, einen Winkel
a zur Horizontalen bildet (Siehe Abb. 27). Der Balken hat eine Länge
l und eine Masse M. Der Abstand zwischen dem Lagerpunkt des Balkens und dem Befestigungspunkt des Seils an der Wand wird als h
bezeichnet.
Was sind die Spannung des Seils und die Kraft, die das Drehgelenk
auf den Balken ausübt?
Wir zeichnen zuerst die Kräfte, die auf das System wirken:
1.
2.
3.
4.
551
Die Gravitationskraft des aufgehängten Gewichts m
Die Gravitationskraft des Balkens. Sie greift am Schwerpunkt des
Balkens an.
Die Spannung im Seil S
Die Kraft, die das Drehgelenk auf den Balken ausübt, ist F. Wir
bemerken, dass diese Kraft nicht entlang des Balkens wirken
muss!
Physik
552
r
F
a
Balken mit Drehgelenk.
h
Die Bewegung starrer Körper
Figur 27.
l
r
Mg
q
tan q =
r
S
r
mg
h - l sin a
l cosa
m
Wir wählen das Koordinatensystem so, dass die y-Achse längs der
Wand nach oben zeigt. Der Ursprung des Koordinatensystems liegt
im Drehgelenk.
¤
ÏFx + Sx = 0
Ì
ÓFy + Sy - ( M + m) g = 0
Die Gleichgewichtsbedingung für die Kräfte sieht in vektorieller
Form und in Komponenten so aus:
r r
r
r
F + S + Mg + mg = 0
Für die Bestimmung der Drehmomente müssen wir eine Drehachse
wählen. Wir nehmen eine Drehachse, die im Endpunkt des Balkens
liegt, wo das Gewicht m angehängt ist. Eine positive Drehung ist im
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
Gleichgewicht der starren Körper (Statik)
Uhrzeigersinn gewählt. Mit dieser Wahl verschwinden die Drehmomente der Spannung und des Gewichts m.
Fy):
r
Fy
r
F
a
r
Mg
+
Drehachse
m
553
Wir müssen die Drehmomente der Gravitationskraft des Balkens und
der Kraft F berechnen. Wir können die zwei Komponenten der Kraft
F als “Vektoren” betrachten (d.h. wir unterteilen die Kraft F in zwei
und
Vektoren
Fx
h
r
Fx
( )
Ê lˆ
Á ˜ ( Mg) cosa + ( l)( Fx ) sin a - ( l) Fy cosa = 0
Ë 2¯
Wir erhalten (beachte das Vorzeichen!):
Physik
554
Die Bewegung starrer Körper
Zusammenfassend haben wir drei Gleichungen gefunden mit vier
Unbekannten Sx, Sy, Fx, Fy:
( )
Ï
ÔF + S = 0
x
x
ÔÔ
ÌFy + Sy - ( M + m) g = 0
Ô
ÔÁÊ l ˜ˆ ( Mg) cosa + ( l)( F ) sin a - ( l) F cosa = 0
x
y
ÔÓË 2 ¯
h - l sin a
l cosa
Geometrisch haben wir die zusätzliche Bedingung:
Sy = Sx tan q = Sx
( )
ÏFx + Sx = 0
Ô
ÔFy + Sy - ( M + m) g = 0
Ô l
ÌÁÊ ˜ˆ ( Mg) cosa + ( l)( Fx ) sin a - ( l) Fy cosa = 0
ÔË 2 ¯
Ô
h
- l sin a
Ô S = Sx
l cosa
Ó y
Das Gleichungssystem kann nun eindeutig gelöst werden:
Es folgt:
ÏFx = - Sx
Ô
ÔFy = - Sy + ( M + m) g
Ô
Ì 1 Mg + Fx sin a - Fy = 0
cosa
Ô2
Ô
h - l sin a
Ô S = Sx
Ó y
l cosa
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)
h - l sin a
Ï
ÔÔFy = Fx l cosa + ( M + m) g
Ì
sin a
Ô1
ÔÓ 2 Mg + Fx cosa - Fy = 0
Gleichgewicht der starren Körper (Statik)
oder
Schliesslich,
Ê l cosa ˆ Ê M
ˆ
Fx = Á
˜ Á + m˜ g
Ë 2 l sin a - h ¯ Ë 2
¯
Die anderen Grössen können damit einfach berechnet werden.
Physik
555
556
Die Bewegung starrer Körper
Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)