etechnikfuermb-teil1 - Department Elektrotechnik und Informatik
Werbung

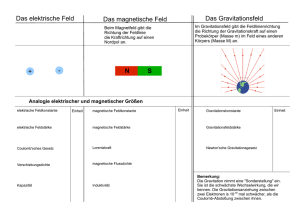
Theorie und Praxis für Karrieren von morgen UNIVERSITÄT SIEGEN FACHBEREICH 12 ELEKTROTECHNIK UND INFORMATIK Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. G. Schröder Elektrotechnik für Maschinenbauer Teil 1: Grundlagen Vorlesungsskript Stand: 1.03 Elektrotechnik für Maschinenbauer Inhaltsverzeichnis Elektrotechnik für Maschinenbauer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 2 Elektrisches Feld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.1 Ladung, Elementarladung, Strom, Stromdichte . . . . . . . . . . . . . . . . . . 3 2.2 Potential, Spannung, Feldstärke, Kraft auf Ladungsträger . . . . . . . . . 8 2.3 Ohmsches Gesetz, elektrischer Widerstand, Leitwert, Temperaturkoeffizient des Widerstandes, Supraleitung, elektrischer Stromkreis, Quellenspannung, Spannungsabfall, Leistung . . . . . . . . . . . . . . . . . . 12 2.4 Elektrostatisches Feld, Verschiebungsfluss, Verschiebungsflussdichte, elektrische Feldkonstante, Dielektrizitätskonstante, Dielektrikum, Kondensatoren, Kapazität, gespeicherte Energie, Coulombsches Gesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 3 Magnetisches Feld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 3.1 Pole, quellenfreies Feld, Rechte-Hand-Regel . . . . . . . . . . . . . . . . . . 25 3.2 Magnetischer Fluss und Flussdichte (Induktion) . . . . . . . . . . . . . . . . 27 3.3 Durchflutung und magnetische Feldstärke, Durchflutungsgesetz . . . 29 3.4 Magnetische Spannung, magnetischer Widerstand, Permeabilität, magn. Feldkonstante, Hysterese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 3.5 Lorentzkraft, Induktionsgesetz, Generator . . . . . . . . . . . . . . . . . . . . . 39 3.6 Selbstinduktion, Gegeninduktion, Induktivität, Transformator, Wirbelströme, Skineffekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 3.7 Energien und Kräfte im Magnetfeld . . . . . . . . . . . . . . . . . . . . . . . . . 50 3.8 Passive Bauelemente, die sich aus den bisherigen Betrachtungen ergeben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 4 Berechnung von Stromkreisen bei Gleichstrom . . . . . . . . . . . . . . . . . . . . . . 54 4.1 Kirchhoff´sche Gesetze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 4.2 Grundstromkreis, Kurzschluß, Leerlauf, Anpassung, Energie und Leistung, Wirkungsgrad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 4.3 Nichtlineare Widerstände, graphische Arbeitspunktermittlung . . . . . 60 4.4 Widerstandsnetzwerke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 4.5 Vermaschte Netzwerke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68 5 Berechnung von Stromkreisen bei Wechselstrom . . . . . . . . . . . . . . . . . . . . . 75 5.1 Erzeugung von Wechselspannung mit einer elektrischen Maschine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 5.2 Zeitlicher Mittelwert, Effektivwert, Zählpfeile . . . . . . . . . . . . . . . . . 77 5.3 Spannung und Strom an Kapazität und Induktivität . . . . . . . . . . . . . 80 5.4 Reihenschaltungen bei Wechselstrom . . . . . . . . . . . . . . . . . . . . . . . . 82 5.5 Zeigerdiagramme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85 5.6 Parallelschaltungen bei Wechselstrom . . . . . . . . . . . . . . . . . . . . . . . . 89 5.7 5.8 6 7 Komplexe Zeiger in der Wechselstromtechnik . . . . . . . . . . . 92 Die komplexe Darstellung von Widerständen und Leitwerten bei Wechselstrom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94 5.9 Wirk-, Blind und Scheinleistung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98 5.10 Ortskurven der Impedanz und der Admittanz . . . . . . . . . . . . . . . . . . 99 5.11 Reihen- und Parallelschwingkreise . . . . . . . . . . . . . . . . . . . . . . . . . 101 5.12 Der Frequenzgang passiver Netzwerke, Bode-Diagramm . . . . . . . . 105 5.13 Blindleistungs-Kompensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109 Dreiphasen-Wechselstrom (Drehstrom) . . . . . . . . . . . . . . . . . . . . . 112 6.1 Das verkettete Drehstromsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . 114 6.2 Die Leistung im Drehstromsystem . . . . . . . . . . . . . . . . . . . . . . . . . . 118 6.3 Stern-/Dreieck-Umschaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119 Elektrodynamische Ausgleichsvorgänge . . . . . . . . . . . . . . . . . . . . . . . . . . . 121 7.1 Ein- und Ausschaltvorgänge mit idealen Bauteilen . . . . . . . . . . . . . 121 7.2 Reale Schaltvorgänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123 1 1 Einleitung Die Elektrotechnik ist ein Teilgebiet der angewandten Physik. Sie behandelt die Wechselwirkungen zwischen ruhenden und bewegten Ladungen. Sie hat sich die Aufgabe gestellt, diese Wechselwirkungen zu beobachten, zu analysieren und die herrschenden Gesetzmäßigkeiten zu beschreiben. Diese Beschreibung geschieht mit Hilfe der Mathematik, d.h. in der Regel durch Formeln. Dadurch wird das Wissen auf diesem Gebiet allgemein verfügbar und anwendbar. Physikalische Größen, Einheiten und Gleichungen: Die in der Elektrotechnik verwendeten Basisgrößen sind Länge, Zeit, Masse und Stromstärke. Alle anderen Größen werden aus diesen Basisgrößen abgeleitet. Zu jeder Basisgröße gehört eine Basiseinheit. Dies sind in unserem Falle m (Meter), s (Sekunde), kg (Kilogramm) und A (Ampère). Dieses System von Basiseinheiten wird häufig auch als MKSA-System bezeichnet. Aus den Basiseinheiten lassen sich weitere Einheiten ableiten. Dabei achten wir darauf, dass das Einheitensystem kohärent bleibt. Das heißt, dass abgeleitete Einheiten nur durch Produktbildung aus Basiseinheiten entstehen, ohne dass von 1 verschiedene Zahlenwerte als Faktoren vorkommen. Definitionen: 1. Meter Seit 1960 ist das Meter als das 1.650.763, 73 - fache der Wellenlänge der von Atomen des Nuklids 86Kr beim Übergang vom Zustand 5d5 zum Zustand 2p10 ausgesandten, sich im Vakuum ausbreitenden Strahlung, definiert. 2. Kilogramm Ein Kilogramm ist die Masse eines Liters Wasser bei 4° C. (Urkilogramm in Sivres). 3. Sekunde Eine Sekunde ist das 9.192.673.770 - fache der Periodendauer der Strahlung, die beim Übergang zwischen den beiden Hyperfeinstrukturniveaus des Grundzustandes von Atomen des Nuklids 133Cs entsteht. 4. Ampère 2 Ein Ampère ist die Stärke eines zeitlich unveränderlichen Stromes, der durch zwei im Vakuum parallel im Abstand von einem Meter angeordnete, geradlinige, unendlich lange Leiter von vernachlässigbar kleinem Querschnitt fließend, pro Meter Leiterlänge eine elektrodynamisch verursachte Kraft von 2!10-7 N = 2!10-7 kgm/s2 erzeugt. Vorsatzzeichen: Teile Vielfache Benennung Kurzzeichen Faktor Dezi d 10-1 Zenti c 10-2 Milli m 10-3 Mikro µ 10-6 Nano n 10-9 Piko p 10-12 Femto f 10-15 Atto a 1018 Deka d 101 Hekto h 102 Kilo k 103 Mega M 106 Giga G 109 Tera T 1012 3 Einige abgeleitete Größen: Größe Formelzeichen Bezeichnung der Einheit Kurzzeichen Zusammenhang mit Grundeinheit Kraft F Newton N 1N = 1 kgm/s2 Arbeit, Energie W Joule J 1J = 1 kgm2/s2 = 1 Nm = 1Ws Leistung P Watt W 1W = 1 kgm2/s3 Ladung Q Coulomb C 1C = 1 As Spannung U Volt V 1V = 1 kgm2/As3 Widerstand R Ohm Ω 1Ω = 1 kgm2/A2s3 Leitwert G Siemens S 1S = 1 A2s3/kgm2 Groß- und Kleinschreibung der Formelzeichen: Es gilt die Vereinbarung, dass zeitlich konstante elektrische Größen in der Regel mit großen Formelzeichen dargestellt werden; zeitlich veränderliche Größen erhalten kleine Formelzeichen. 2 Elektrisches Feld 2.1 Ladung, Elementarladung, Strom, Stromdichte Wenn sich Ladungsträger bewegen, sprechen wir von einem elektrischen Strom. Dabei kann es sich um die Bewegung von positiv oder negativ geladenen Teilchen (Ionen oder Elektronen) oder beides handeln. Die bewegten Ladungen sind immer ein Vielfaches der Elementarladung. Das Elektron ist negativ geladen und trägt eine solche Elementarladung QE = e = −1,602 ⋅10−19 As Die Einheit der Ladung ist As oder auch Coulomb. Ionen können ein Mehrfaches der Elementarladung tragen und positiv oder negativ geladen sein. Der Strom in einem Leiter von einem Punkt 1 zu einem Punkt 2 wird positiv gerechnet, wenn positive Ladungsträger sich von 1 nach 2 oder negative Ladungsträger sich von 2 nach 1 bewegen. 4 I 1 2 + Bild 2.1: Bewegung von Ladungsträgern Diese Definition legt die sogenannte technische Stromrichtung fest. Wenn sich nur Elektronen bewegen, wie es häufig der Fall ist, bewegen sie sich entgegen der technischen Stromrichtung. Zur Beschreibung der Bewegungsrichtung, der Geschwindigkeit und der antreibenden Kräfte definiert man ein elektrisches Feld. Wenn die drei genannten Größen konstant sind, heißt das Feld stationäres elektrisches Feld. Spannt man innerhalb des elektrischen Feldes eine beliebige Fläche auf und ist man in der Lage, die Anzahl der Ladungen Δq = n"e zu bestimmen, die diese Fläche innerhalb eines bestimmten Zeitintervalls Δt durchdringen, so hat man ein Maß für die Stärke der Strömung innerhalb dieser Fläche, die Stromstärke ∆ q dq = ∆t → 0 ∆ t dt i = lim I - Bild 2.2: - Technische Stromrichtung und Bewegungsrichtung der Elektronen Kennt man die Stromstärke i(t) und möchte die innerhalb einer gewissen Zeit T transportierte Ladungsmenge ermitteln, stellt man die Gleichung um und erhält T q = ∫ idt 0 Da die Ladung q in As gemessen wird, ist die Einheit der Stromstärke das Ampère (A). 5 q / As a) t/s t1 i/A t/s t1 b) Bild 2.3: Ladungstransport bei wechselnder Stromrichtung Die Materialeigenschaften der durchdrungenen Stoffe sind sehr unterschiedlich. Es gibt gute elektrische Leiter, weniger gute Leiter und Isolatoren, die praktisch gar nicht leiten. Wenn man zwischen der Ladungsquelle und der Ladungssenke einen Draht aus Kupfer (guter elektrischer Leiter) mit konstantem Querschnitt anbringt und darum herum einen schlechten Leiter (z.B. Luft), dann kann man davon ausgehen, dass über der gesamten Länge des Leiters an jeder Stelle der gleiche Strom gemessen wird und dass dieser Strom der Gesamtstrom zwischen Quelle und Senke ist. Es werden keine Ladungsträger seitlich von Außen in den Leiter eintreten oder austreten. Beispiel: Die Anzahl der beweglichen Elektronen in Kupfer ist n = 8,43 ⋅ 1019 / mm3 Die ionisierten Atomrümpfe des Kupfers können sich nicht bewegen, da sie fest in das Metallgitter eingebunden sind. Der gesamte in dem Leiter fließende Strom i ist dann i= dq dt = d (q p − q n ) dt = d (− n ⋅ e ⋅ A ⋅ x) dt wobei A die Querschnittfläche des Leiters ist und x der Weg, den die Elektronenwolke zurückgelegt hat. 6 Aus dieser Gleichung können wir die Bewegungsgeschwindigkeit der einzelnen Elektronen bekommen: dx = − n ⋅ e ⋅ A ⋅ νe dt i ν e= − n⋅e⋅ A i = −n ⋅ e ⋅ A Wir nehmen nun an, dass es sich um eine gleichförmige Strömung mit konstanter Stromstärke I = 1 A handelt. Dieser Strom heißt übrigens Gleichstrom, weil er immer in die gleiche Richtung fließt. Der Querschnitt des Leiters sei A =1 mm2. Dann ist die Bewegungsgeschwindigkeit: mm 1 A ⋅ mm 3 νe = 19 2 = 0,074 −19 s 8,43 ⋅ 10 ⋅ 1,602 ⋅ 10 As ⋅ 1mm Diese Geschwindigkeit erscheint zunächst sehr klein. Es ist jedoch nicht diese Geschwindigkeit von Interesse sondern eher die Tatsache, dass wie bei einer Strömung einer Flüssigkeit durch ein Rohr konstanten Querschnitts die Bewegungsgeschwindigkeit an jeder Stelle des Leiters zu jeder Zeit gleich groß ist. In unterschiedlichen Anwendungen können die typischen Stromstärken sehr unterschiedlich sein: Ströme in Elektronikschaltungen: Glühlampe 230V / 100 W: Heizlüfter 230V / 2000 W: Anlasser im Auto: Aluminium-Schmelzofen: 1µA bis 100 mA 0,43 A 8,7 A 100A 10000A Wenn man einem bestimmten elektrischen Strom I hintereinander angeordnete Leiterabschnitte mit unterschiedlichen Querschnitten anbietet, dann ist die Bewegungsgeschwindigkeit der Elektronen (wie bei Flüssigkeiten in Rohrabschnitten mit unterschiedlichen Querschnitten) in den einzelnen Abschnitten unterschiedlich groß. Es besteht offensichtlich der Zusammenhang ν~ I A 7 I v2 - - - S1 v1 S2 - v1 - - A1 A1 A2 Bild 2.4: Geschwindigkeit der Elektronen bei wechselndem Leiterquerschnitt Die Bewegungsgeschwindigkeit hat direkt zu tun mit den Verlusten, die beim Ladungstransport entstehen. Daher ist der Quotient I/A in der Elektrotechnik eine wichtige Größe. Diese Größe wird Stromdichte genannt und erhält das Formelzeichen S. Die in der Technik üblicherweise verwendete Einheit ist A/mm2. Für konstanten Strom in einem Leiter eines bestimmten Querschnittes A erhalten wir I A Wenn die Stromdichte S in einem Leiter zu große Werte annimmt, werden die Atomrümpfe zu solch großen Schwingungen angeregt, dass das Metallgitter zerstört wird. Der Leiter brennt durch. Übliche Stromdichten in Kupfer liegen im Bereich 3...20 A/mm2. S= Der Fall des Leiters konstanten Querschnitts zwischen Ladungsquelle und Ladungssenke ist ein Spezialfall. Wenn Quelle und Senke gemeinsam von leitendem Material umgeben sind, werden die Bewegungsgeschwindigkeit und die Bewegungsrichtung der Ladungsträger stark vom betrachteten Ort abhängen. Also bietet es sich an, einen Geschwindigkeitsvektor bzw. ! ! einen Vektor der Stromdichte S einzuführen. Dazu führen wir einen Flächenvektor A ein. Sein Betrag ist gleich der Fläche selbst. Seine Richtung ist die Flächennormale. Stromröhre mit Strom ∆Ι S α ∆A Bild 2.5: Flächenelement im Strömungsfeld 8 Dadurch gewinnen wir die Freiheit, die Fläche beliebig in den Raum legen zu können. Die Flächennormale muß nun nicht mehr in Richtung der Leiter-Achse weisen. Wenn wir allerdings den Gesamtstrom I im Leiter erfassen wollen, muß die Fläche den Leiter vollständig umfassen. Tut sie dies nicht, dann ist nur der Teilstrom erfasst, der die Fläche durchdringt. Es gilt: ! ! I = ∫ S ⋅ dA A 2.2 Potential, Spannung, Feldstärke, Kraft auf Ladungsträger Wir sind bisher davon ausgegangen, dass ein Strom fließt, ohne nach der Ursache für den Stromfluss zu fragen. Tatsächlich ist es so, dass es für den Stromfluss eine treibende Kraft geben muß. Diese Kraft wirkt auf die Ladungsträger und es wird eine Arbeit verrichtet, wenn sich die Ladungsträger unter Krafteinwirkung bewegen. Die Arbeit, die verrichtet werden muß, um eine Ladung vom Punkt 1 zum Punkt 2 zu bewegen, ist proportional der Ladung Q. Der Proportionalitätsfaktor zwischen beiden wird Potentialdifferenz genannt. ∆ ϕ = ϕ 2 − ϕ1 = ∆W Q ϕ3 Q + ϕ2 F s E ∆ϕ = U21 d + Q ϕ1 F ϕ0 Bild 2.6: Äquipotentialflächen und Feldstärkevektor im homogenen Feld Wird eine Ladung Q in einem elektrischen Feld vom Punkt 1 zum Punkt 2 bewegt, durchläuft sie eine Potentialdifferenz Δ!. Für die aufgenommene oder abgegebene Energie ist nur die Potentialdifferenz maßgebend, nicht der absolute Wert der beiden einzelnen Potentiale. Somit ist die Wahl des Bezugspunktes für das Potential frei. Dieser Zusammenhang ist vergleichbar mit einer Masse m, deren potentielle Energie verändert wird, indem sie im Gravitationsfeld der Erde von einer Höhe h1 auf eine Höhe h2 gebracht wird. Für die aufzubringende Arbeit ist nur Δh interessant und nicht die absolute Höhe. 9 Wird eine Masse m auf gleicher Höhe (waagerecht) reibungsfrei verschoben, ist keine Arbeit notwendig. Im elektrischen Feld gibt es analog zu den Höhenlinien Linien bzw. Flächen gleichen Potentials. Diese werden Äquipotentiallinien bzw. Äquipotentialflächen genannt. Zur Lageänderung einer Ladung auf einer Äquipotentialfläche ist ebenfalls keine Arbeit notwendig. Die Einheit des Potentials ist das Volt. [ϕ ] = Joule Ws VAs = = =V C As As Die Richtung der Kraft steht immer senkrecht auf den Äquipotentialflächen. Wenn wir von einem homogenen Feld ausgehen, in dem an jedem Ort die Kraft auf die Ladungsträger gleich groß ist und in die gleiche Richtung weist, dann sind die Äquipotentialflächen ebene Flächen. Betrachten wir nun zwei Äquipotentialflächen im Abstand d. Die Potentialdifferenz zwischen beiden ist ∆ϕ = ∆W F ⋅ d F = = d = E⋅d Q Q Q Die Größe E wird Elektrische Feldstärke genannt. Der Zusammenhang zwischen der Kraft auf die Ladungsträger F und der elektrischen Feldstärke E kann allgemein ausgedrückt werden: ! F ! =E Q Die elektrische Feldstärke ist ein Vektor. Dieser Vektor zeigt in die Richtung der Kraft, die auf eine positive Ladung ausgeübt wird. Die Einheit der elektrischen Feldstärke ist V/m. Wird eine elektrische Ladung von einer Äquipotentialfläche mit dem Potential !1 auf eine Äquipotentialfläche mit dem Potential !2 verschoben und anschließend weiter auf eine dritte Fläche mit dem Potential !3, dann gilt ϕ 3 − ϕ 1 = (ϕ 3 − ϕ 2 ) + (ϕ 2 − ϕ 1 ) = U 32 + U 21 = U 31 Die Differenz zwischen zwei Potentialen wird Elektrische Spannung genannt. Das Formelzeichen ist U und die Einheit ist die des Potentials, also Volt. Wird eine Ladung im elektrischen Feld bewegt, so verändert sich ihr Energieniveau. Die ! größte Änderung der Energie erfährt sie dann, wenn sie sich in Richtung von E bewegt. Wählt man einen beliebigen Weg, so gilt für den Weg vom Punkt 1 nach Punkt 2: 2 U 12 = ! ! ∫ Eds = 1 ∆W Q 10 1 ϕ1 + U12 E ds ϕ2 2 Bild 2.7: Freie Bewegung eines Ladungsträgers im elektrischen Feld Wenn der gewählte Weg in sich geschlossen ist, verschwindet das Integral. Das ist auch leicht einzusehen, da man sich am Ende des Integrationsweges wieder auf der gleichen Äquipotentialfläche befindet wie zu Beginn. ∫ ! ! E ⋅ ds = 0 Die Kraft auf die Ladungsträger wirkt immer in Richtung des größten Potentialgefälles, somit kann man schreiben ! E = − grad ϕ ϕ3 + E + ϕ2 E + E Bild 2.8: Richtung des Feldstärkevektors im inhomogenen Feld ϕ1 11 Wenn in einem homogenen Feld der Weg in Richtung der Kraft (senkrecht zu den Äquipotentialflächen) gewählt wird, wird daraus in skalarer Schreibweise E =− ∆ϕ ∆s Das Fließen eines Stromes ist nicht Voraussetzung dafür, dass eine elektrischen Feldstärke existiert. Auch in einem Isolator kann eine elektrische Feldstärke vorhanden sein. Wenn jedoch das Medium, in dem die Feldstärke vorherrscht, leitfähig ist, dann stellt sich eine Stromdichte ein, die gleich der Feldstärke multipliziert mit einer Materialkonstante ist: ! ! 1 ! S = κE = E ρ κ>0 ϕ3 + v + ϕ2 v + v Bild 2.9: ϕ1 Bewegungsrichtung der Ladungsträger im inhomogenen elektrischen Feld Die Materialkonstante κ wird spezifische elektrische Leitfähigkeit genannt. Der Kehrwert ρ heißt demzufolge spezifischer elektrischer Widerstand. Die Einheit des spezifischen Ω⋅ mm2 Widerstandes ist . Die mm2 werden hier bewusst nicht gegen das m gekürzt ! m Der spezifische elektrische Widerstand des Kupfers ist ρCu = 0,017 Ω mm 2 m Der des Eisens ist dagegen höher: ρ Fe Ω mm 2 = 0,1 m 12 Silber leitet noch etwas besser als Kupfer, Gold dagegen etwas schlechter. Beide Metalle sind allerdings für die Anwendung in großen Mengen zu teuer. Das Aluminium hat einen spezifischen Widerstand von Ω mm2 m Wegen seiner Zugfestigkeit wird es häufig bei Hochspannungs-Freileitungen verwendet. ρ Al = 0,03 Man erkennt aus den genannten Zahlen, warum das Kupfer in der Elektrotechnik eine so große Rolle spielt. 2.3 Ohmsches Gesetz, elektrischer Widerstand, Leitwert, Temperaturkoeffizient des Widerstandes, Supraleitung, elektrischer Stromkreis, Quellenspannung, Spannungsabfall, Leistung Wir betrachten wieder einen langgestreckten Leiter konstanten Querschnitts, an dessen Enden unterschiedliche Potentiale !1 und !2 vorherrschen. In diesem Leiter findet durch den Einfluß des elektrischen Feldes eine Ladungsträgerbewegung statt. Es gilt S= I 1 1 ϕ1 − ϕ2 = E= ρ A ρ l - 1 - - - A - - - 2 E F S l Spannung über Länge l : U Strom durch Fläche : I Bild 2.10: Stromröhre Nach der Potentialdifferenz aufgelöst ergibt das U12 = ϕ1 − ϕ2 = ρ ⋅ l ⋅ I = R⋅ I A ; R = ρ⋅ l A Die Größe R fasst den spezifischen elektrischen Widerstand und die Geometrie des Leiters zusammen. Sie wird Elektrischer Widerstand genannt. R ist der Proportionalitätsfaktor zwischen der an einem Leiter anliegenden Spannung und dem sich daraufhin einstellenden Strom. Damit kommen wir zum Ohmschen Gesetz: 13 R= U I Die Einheit des elektrischen Widerstandes ist 1 Ω (Ohm). Manchmal wird auch der Kehrwert des elektrischen Widerstandes verwendet. Er wird als elektrischer Leitwert bezeichnet. G= I 1 = R U Seine Einheit ist 1S ( Siemens) = 1A /1V = 1/Ω. Der Begriff Ohmscher Widerstand kennzeichnet eine bestimmte Gruppe von Leitern mit linearer Charakteristik. Wenn ein Widerstand als Ohmscher Widerstand bezeichnet wird, heißt das, dass der Widerstand unabhängig von Strom und Spannung ist (Voraussetzung ist dabei eine konstante Temperatur). Betrachtet man den ohmschen Widerstand von Leitern aus verschiedenen Materialien als Funktion der Temperatur, so stellt man fest, dass in den meisten Fällen eine Abhängigkeit besteht. Sowohl eine Erhöhung als auch eine Verringerung des Widerstandes mit steigender Temperatur ist möglich. Wenn dR stark positiv ist, spricht dϑ man von einem Kaltleiter, ist es negativ, handelt es sich um einen Heißleiter. R R = f (ϑ) α > 0 (positiv), Kaltleiter, PTC a α = Temperaturkoeffizient b c α=0 α < 0 (negativ), Heißleiter, NTC ϑ Bild 2.11: Unterschiedliche Temperaturabhängigkeiten des elektrischen Widerstandes Das Temperaturverhalten wird beschrieben mit Hilfe des Temperaturkoeffizienten α. Dieser Koeffizient wird angegeben für 20° C. R = R20 ⋅ (1 + α∆ϑ ) mit Δ" = " - 20° C. 14 Einige wenige Legierungen weisen ein α von nahezu 0/K auf. Das Konstantan z.B. hat daher seinen Namen. Kupfer: Aluminium: α = 3,92"10-3/K α = 4,0"10-3/K R ∆R = R20 ∗ α ∗ ∆ϑ ∆ϑ 20 Bild 2.12: ϑ / °C Temperaturverhalten des ohmschen Widerstandes Wenn man Leiter unter eine bestimmte Temperatur abkühlt, die in der Regel nahe dem absoluten Nullpunkt liegt, verlieren sie vollkommen ihren Widerstand. Diese Temperatur, die materialabhängig ist, wird Sprungtemperatur genannt. Unterhalb der Sprungtemperatur befindet sich ein Stoff im Zustand der Supraleitung. In diesem Zustand ist kein elektrisches Feld mehr notwendig, um einen Stromfluss aufrecht zu erhalten. In der letzten Zeit werden immer mehr supraleitende Stoffe bekannt, die eine relativ hohe Sprungtemperatur aufweisen (Größenordnung -100 °C). Je höher die Sprungtemperatur, desto geringer der Kühlaufwand, um Supraleitung herzustellen. Wenn ein bestimmter Strom I durch einen Leiter mit dem Widerstand R fließen soll, ist dazu die Spannung U = I"R notwendig. Die Spannung U ist ein Maß für die Energie, die eine bestimmte Ladungsmenge aufnimmt oder abgibt, wenn sie eine Potentialdifferenz durchwandert. u = ∆ϕ = Mit i = dq erhalten wir dt dw dq dw u2 = u ⋅i = = i2 ⋅ R p= dt R 15 Die an einem ohmschen Widerstand in Wärme umgesetzte elektrische Leistung ist das Produkt aus Spannung und Strom. Die in einem ohmschen Widerstand in einem bestimmten Zeitintervall umgesetzte Energie ist t2 t2 t1 t1 W = ∫ u ⋅ i ⋅ dt = R ∫ i 2 dt W W0 I0 = const. 4 I = 2I0 3 2 1 I = I0 t Bild 2.13: Energieumwandlung am ohmschen Widerstand In einem ohmschen Widerstand verlieren die Ladungen Energie. Diese Energie wird in Form von Wärme frei. Es muß nun andere Mechanismen geben, um den Ladungsträgern zunächst einmal die notwendige Energie zu verleihen. Dies kann z.B. auf chemischem Wege erfolgen. Im “galvanischen Element” wird den Ladungen ein hohes Energieniveau verliehen, indem die positiven und negativen Ladungsträger räumlich voneinander getrennt werden. Dies ist messbar in Form einer elektrischen Spannung zwischen den beiden Klemmen (Plus-Pol und Minus-Pol). Verbindet man die Pole mit einem ohmschen Widerstand, kommt ein Stromfluss zustande. Die Batterie gibt dann elektrische Leistung ab und der Widerstand nimmt sie auf. Der Vorgang kann nicht ewig dauern, denn die in der Batterie gespeicherte chemische Energie ist begrenzt. Ist sie aufgebraucht, wird die Spannung zu null und damit auch die Leistungsabgabe. Die Batterie ist leer. 16 + - Fq + - Fq + + + + + + + + - - - - - + + + Bild 2.14: - - + + - - + + + - - + - - - - Trennung der Ladungsträger in einem galvanischen Element Es gibt Quellen elektrischer Energie, die in der Lage sind, durch Aufnahme elektrischer Energie einen Vorrat an chemischer Energie zu bilden. Dazu gehören z. B. die Blei-Akkumulatoren in den Autos. Sie werden zyklisch entladen und geladen. Darüber hinaus gibt es Quellen elektrischer Energie, die keine Speicherfähigkeit aufweisen. Dazu gehören die Generatoren in den Kraftwerken und die Solarzellen. Sie liefern nur so lange elektrische Energie, wie sie von außen mechanische bzw. Strahlungsenergie aufnehmen. Wird die aufgenommene Leistung zu Null, wird auch sofort die gelieferte elektrische Leistung zu Null. Quellen elektrischer Energie treten in der Regel entweder als Spannungsquellen oder als Stromquellen auf. Damit ist im Falle der Spannungsquelle gemeint, dass sich aufgrund der internen Prozesse an den Klemmen eine Spannung bildet. Durch Anschluss eines Verbrauchers an die Klemmen kommt dann ein Stromfluss (und damit ein Energiefluss) zustande, wobei die Höhe des Stromes vom ohmschen Widerstand des Verbrauchers abhängt. Im Falle der Stromquelle fließt ständig ein bestimmter Strom und die sich einstellende Spannung hängt vom Verbraucher ab. Spannungsquellen sind wesentlich häufiger anzutreffen als Stromquellen. Daher werden wir uns auch zunächst nur mit den Spannungsquellen befassen. Die Art und Weise, wie die Spannung in der Spannungsquelle erzeugt wird, sei zunächst ohne Belang. Wir gehen aber erst einmal davon aus, dass die Spannung ständig die gleiche Polarität hat, dass es sich also um eine Gleichspannung handelt. 17 Gleichspannungsquelle und ohmscher Widerstand werden mit Hilfe von Schaltungssymbolen dargestellt. Zur Kennzeichnung der Klemme der Quelle, die gegenüber der anderen Klemme das höhere Potential besitzt, wird diese Klemme durch einen längeren Strich dargestellt. Beim ohmschen Widerstand verändert sich durch Vertauschen der Klemmen nichts. Daher ist auch das Schaltungssymbol symmetrisch. I + - Uq Bild 2.15: R U Stromkreis Die Quelle liefert die Quellenspannung Uq. Sie ist durch sehr gut leitende Verbindungen (großer Querschnitt, kurze Länge, kleiner spezifischer Widerstand) , die durch einfache Striche dargestellt werden, mit dem Verbraucher, dem Widerstand R verbunden. R bestimmt den nun fließenden Strom I. Die gesamte Quellenspannung ist auch direkt an den Anschlüssen des Widerstandes zu messen, wird hier jedoch als Spannungsabfall bezeichnet. Der Strom I fließt vom Pluspol der Quelle über den Widerstand zum Minuspol und in der Quelle vom Minus- zum Pluspol. Es handelt sich also um einen geschlossenen Stromkreis. Die gerade definierte Stromrichtung ist die technische Stromrichtung. Wie wir wissen besteht der Strom in metallischen Leitern aus bewegten Elektronen. Diese wandern als Träger negativer Ladung genau entgegen der dargestellten Stromrichtung. Der Spannungsabfall am Widerstand wird mit einem Pfeil gekennzeichnet, der in Richtung des Stromflusses weist. Da der Spannungsabfall am Widerstand und die Quellenspannung identisch sind, weist auch der Pfeil, der die Quellenspannung darstellt, vom Plus- zum Minuspol. Schaltet man mehrere Widerstände in Reihe, also hintereinander, so gilt für jeden einzelnen das ohmsche Gesetz. Der elektrische Strom I durchfließt alle Widerstände. R1 Bild 2.16: R2 R3 R4 .... Rn Reihenschaltung ohmscher Widerstände An jedem einzelnen Widerstand ist entsprechend seinem Widerstand ein Spannungsabfall zu messen. Die Summe aller Spannungsabfälle ist gleich der außen angelegten Spannung. 18 I ⋅ R1 + I ⋅ R2 + .......+ I ⋅ Rn = U 1 + U 2 + .....+ U n = U q I ⋅ Rges = U q Rges = R1 + R2 + .....+ Rn Der von der Spannungsquelle aus gesehene Gesamtwiderstand der Last ist gleich der Summe der Einzelwiderstände. Bei der Parallelschaltung liegen alle Widerstände an der gleichen Spannung. Es muß wiederum für jeden Einzelwiderstand das ohmsche Gesetz gelten. R1 Bild 2.17: R2 R3 R4 Rn Parallelschaltung ohmscher Widerstände Damit ergeben sich unterschiedliche Ströme in den einzelnen Widerständen, die in Summe den Gesamtstrom ergeben. U = R1 ⋅ I 1 = R2 ⋅ I 2 = ....... = Rn ⋅ I n I ges = U U U U = I 1 + I 2 + .....+ I n = + + .....+ Rges R1 R2 Rn 1 1 1 1 = + + ......+ Rges R1 R2 Rn Der Gesamtwiderstand der Anordnung ist kleiner als der kleinste der Einzelwiderstände. 2.4 19 Elektrostatisches Feld, Verschiebungsfluss, Verschiebungsflussdichte, elektrische Feldkonstante, Dielektrizitätskonstante, Dielektrikum, Kondensatoren, Kapazität, gespeicherte Energie, Coulombsches Gesetz Zunächst einmal betrachten wir wieder wie zu Beginn ein homogenes elektrisches Feld. Es wird erzeugt, indem man zwei parallele leitende Platten mit einer Spannungsquelle verbindet. Wenn die Abmessungen der Platten ausreichend groß gegenüber deren Abstand sind, kann man davon ausgehen, dass sich mitten zwischen den Platten ein homogenes Feld ausbildet. Diese Annahme trifft an den Rändern nicht zu. Daher werden diese zunächst einmal nicht betrachten. + + + + + + + + + - Uq E ϕ = const. - - - - - - - - Bild 2.18: Plattenkondensator Schon in Kap. 2.1 haben wir festgestellt, dass zur Entstehung einer elektrischen Feldstärke E das Fließen eines Stromes keine Voraussetzung ist. Wir sorgen nun dafür, dass im Zwischenraum zwischen den beiden Platten keine Ladungsträgerbewegung stattfindet. Wir bringen dort also einen Isolator an (spezifische Leitfähigkeit κ = 0). Der Isolator wird in diesem Falle auch Dielektrikum genannt. Es sammeln sich nun auf beiden Platten Ladungen an, die das Bestreben haben, den Isolator zu durchdringen. Das ist jedoch nicht möglich. Auf beiden Platten sammelt sich die gleiche Zahl von Ladungsträgern an, so dass das ganze Gebilde nach außen hin elektrisch neutral ist. Nun stellen wir uns vor, dass sich zwischen je einer positiven Ladung auf der einen Platte und einer negativen Ladung auf der anderen Platte eine Verbindung einstellt, eine sogenannte Feldlinie. Die Gesamtheit der Feldlinien bildet den Verschiebungsfluss Ψ. Wenn sich sehr viele Ladungen auf den Platten befinden, ergibt das einen großen Verschiebungsfluss. Dieser Begriff wurde in Analogie zum Fluss im magnetischen Feld gewählt. Er verwirrt etwas, da ja wegen des Isolators im stationären Zustand nichts fließt. Die Anzahl der Ladungen pro Flächeneinheit wird Verschiebungsflussdichte D genannt. D= Ψ Q = A A Die Einheit der Verschiebungsflussdichte ist As/m2. 20 Im allgemeinen Fall (inhomogenes Feld) wird die Verschiebungsflussdichte als Vektor notiert. Sie ist eine Feldgröße und auch innerhalb des Isolators definiert. Sie ist der elektrischen Feldstärke proportional. In Vakuum und näherungsweise auch in Luft gilt: ! ! D0 = ε 0 E wobei ε0 als elektrische Feldkonstante oder absolute Dielektrizitätskonstante bezeichnet wird. Sie hat den Wert ε0 = 8,86"10-12 As/Vm. Im elektrischen Feld kann man eine Erscheinung beobachten, die als Influenz bezeichnet wird. Bringt man einen ungeladenen metallischen Körper, der aus zwei trennbaren Hälften besteht, in ein elektrisches Feld, so findet innerhalb dieses Körpers eine Ladungsträgertrennung statt. Die negativen Ladungsträger auf dem Prüfkörper orientieren sich zu den positiven Ladungsträgern auf der positiv geladenen Feldplatte hin und umgekehrt. Trennt man nun die beiden Hälften und entfernt sie aus dem Feld, so sind sie positiv bzw. negativ geladen. Schafft man dann eine leitende Verbindung zwischen den beiden Hälften, so findet ein messbarer Ladungsträgeraustausch statt. + + + + + + + + + + + + + - - - - - - - - = + + + + + + + + 1 - - - - - - - - 2 + + + + + + + + E 1 2 - - - - - - - - - - - - - Bild 2.19: Influenz - Bild 2.20: + + - + + + + + + + + Es zeigt sich nun, dass bei einer festen Anordnung der Platten und einer festen Spannung, also fester Feldstärke, bei unterschiedlichen Isolator-Stoffen unterschiedliche Flussdichten, also Ladungsträgerdichten auf den Platten entstehen. Dies ist erklärbar dadurch, dass sich in den Molekülen des Isolators die Ladungen trennen und ausrichten, jedoch nicht wandern. Dieser Vorgang ist in unterschiedlichen Dielektrika unterschiedlich stark ausgebildet. Gegenüber Vakuum findet unter den genannten Bedingungen aber immer eine Erhöhung der Verschiebungsflussdichte statt, nie eine Verringerung. Polarisation der Moleküle des Dielektrikums 21 Bei gegebener Feldstärke erhöht sich D gegenüber D0. Das bedeutet, dass sich die auf den Platten befindliche Anzahl von Ladungsträgern erhöht. Wir führen nun eine dimensionslose Materialkonstante ein, die diese Erhöhung beziffert: Die relative Dielektrizitätskonstante εr. ! ! ! D = εE = ε r ε 0 E Hier wurden wie häufig üblich die absolute und die relative Dielektrizitätskonstante zur Dielektrizitätskonstanten ε zusammengefasst. Tab. 2.1: Stoff εr Glas 3,5 .... 9 Glimmer 5 ....... 8 Hartporzellan 5,5 .... 6,5 Luft 1,0006 Papier, imprägniert 2,5 ..... 4 Polyäthylen (PE) 2,3 Polyurethan (PUR) 3,1 .... 4 Quarzglas 4,2 Transformatorenöl 2,5 Relative Dielektrizitätskonstante verschiedener Stoffe Ein einfaches Experiment zeigt die Auswirkung unterschiedlicher Dielektrika in einer gegebenen Anordnung. Wir trennen den Plattenkondensator aus Bild 2.18 von seiner Spannungsversorgung, nachdem die Platten geladen wurden. Die Anzahl der Ladungsträger auf den Platten kann sich nun nicht verändern. Jetzt tauschen wir das Dielektrikum aus. Zum Beispiel verwenden wir statt Luft eine Quarzglasscheibe. Die Verschiebungsflussdichte kann sich nicht ändern. Also muß die Feldstärke kleiner werden. Die Feldstärke wiederum ist über den Plattenabstand mit der Spannung zwischen den Platten verknüpft. U 2 = E2 ⋅ d = D ⋅d ε rQ ε 0 U 1 = E1 ⋅ d = D ⋅d ε rL ε 0 U 2 ε rL 1,0006 = = U 1 ε rQ 4,2 Durch Einschieben der Quarzglasscheibe verringert sich die Spannung zwischen den Platten um den Faktor 4,2! 22 Unter der Annahme, dass sich während des Versuchs die Anzahl der Ladungsträger auf den Platten nicht verändert, ist der Vorgang reversibel. D. h. nachdem die Glasplatte wieder entfernt wurde, ist wieder die ursprüngliche Spannung zwischen den Platten messbar. Die Geometrie, d.h. die Fläche A der Platten und ihr Abstand d, und das verwendete Dielektrikum bestimmen die Speicherfähigkeit eines Kondensators. Mit Speicherfähigkeit oder Kapazität C ist gemeint, wie viele Ladungsträger sich auf den Platten ansammeln, wenn eine bestimmte Spannung angelegt wird. C= Q D⋅ A A = = εr ε0 U U d Die Einheit der Kapazität ist 1F = 1 As/V (Farad). In der Praxis wird eine Kapazität von 1 F selten erreicht. Gebräuchlich sind daher Kondensatoren mit Kapazitäten im Bereich nF, µF oder mF. In den Zuleitungen des Kondensators muß ein Strom fließen, um Ladungsträger auf die Platten aufzubringen oder von ihnen abzuziehen. Wenn sich die Ladung auf den Platten verändert, ändert sich auch die Spannung zwischen den Platten. duC dq i= =C dt dt Werden die Klemmen eines geladenen Kondensators über einen ohmschen Widerstand miteinander verbunden, so entsteht ein Ladungsausgleich zwischen den Platten, solange bis beide Platten wieder neutral sind. Dann wird die elektrische Feldstärke E zu Null und damit auch die Spannung U zwischen den Platten. Ladungsausgleich heißt aber nichts anderes, als dass ein elektrischer Strom fließt. Dieser erwärmt den Widerstand. Die dabei in Wärme umgewandelte Energie war vorher in dem Kondensator, genauer in dessen elektrischem Feld, gespeichert. Ebenso muß (oft nur kurzzeitig) ein Strom zwischen Spannungsquelle und Kondensator fließen, um diesen zu laden. Dadurch wird Energie im elektrischen Feld gespeichert. ∞ ∞ Q U dq 1 W = ∫ u C ⋅ iC dt = ∫ u C dt = ∫ u C dq = ∫ u C Cdu = CU 2 dt 2 0 0 0 0 Nun betrachten wir die Reihenschaltung bzw. Parallelschaltung von Kondensatoren. Parallelschaltung bedeutet, dass zwei oder mehrere Kondensatoren mit möglicherweise unterschiedlicher Kapazität an der gleichen Spannung liegen. 23 C1 Bild 2.21: C2 C3 C4 Cn Parallelschaltung von Kondensatoren Es gilt dann: Q Q Q U = 1 = 2 =.... = n C1 C2 Cn Die auf den Kondensatoren gespeicherte Gesamtladung ist die Summe der Einzelladungen: Qges = Q1 + Q2 +......+Qn Damit muß ebenso gelten: Cges = C1 + C2 +.....+Cn Das bedeutet, dass bei Parallelschaltung die Gesamtkapazität immer größer ist als die größte Einzelkapazität. Bei Reihenschaltung von Kondensatoren muß die Ladung auf den mit der Spannungsquelle verbundenen beiden äußersten Platten umgekehrt gleich groß sein. Die verbundenen Platten zweier miteinander verbundener Kondensatoren bilden ein isoliertes System. Dort können sich die Ladungsträger nur trennen. Sie können aber nicht abfließen. Der Gleichgewichtszustand ist erreicht, wenn sich in jedem Einzelkondensator auf den beiden Platten gleichviele Ladungsträger unterschiedlicher Polarität befinden. Damit ist die Ladung aller Kondensatoren gleich groß. C1 Bild 2.22: C2 C3 C4 .... Cn Reihenschaltung von Kondensatoren Es gilt also: Q1 = Q2 =...... = Qn = Q Die Spannung über allen Kondensatoren muß gleich der Summe der Einzelspannungen sein. U ges = U1 + U 2 +.....+U n 24 Damit gilt: 1 Cges = 1 1 1 + +....+ C1 C2 Cn Das bedeutet, dass die Gesamtkapazität immer kleiner ist als die kleinste Einzelkapazität. Ebenso gilt, dass der Kondensator mit der kleinsten Kapazität die größte Spannung aufnehmen muß. Die Reihenschaltung wird z. B. angewendet, wenn die Durchschlagsfestigkeit eines einzelnen Kondensators kleiner ist als die Gesamtspannung. Abschließend betrachten wir noch das Feld einer Punktladung Q1. Diese Punktladung erzeugt einen Verschiebungsfluß Ψ, der gleich der Ladung selbst ist. Die Feldlinien sind radial nach außen gerichtet. Das bedeutet für die Verschiebungsflußdichte D, dass diese mit dem Quadrat des Abstandes abnehmen muß. Das gleiche gilt für die Feldstärke. E1 = D1 Q1 = ε 4πε d 2 Bringt man nun eine zweite Punktladung Q2 in das Feld der ersten, so entsteht eine Kraft: F = Q2 ⋅ E1 = Q1 ⋅ Q2 4π ε d 2 Diese Kraft ist eine Anziehungskraft, wenn die Ladungen ungleichnamig sind. Sind die Ladungen gleichnamig, stoßen sie sich ab. Die obige Gleichung wird als Coulombsches Gesetz bezeichnet. 25 3 Magnetisches Feld 3.1 Pole, quellenfreies Feld, Rechte-Hand-Regel Anwendungen von Magnetfeldern sind aus dem Alltagsleben wesentlich bekannter als Anwendungen elektrischer Felder. Sie erstrecken sich von der Kompaßnadel über magnetische Schnellverschlüsse, Hubmagnete, Massenspeicher in PC´s bis hin zur Magnetschwebebahn. Aus dem Schulunterricht kennen wir das Experiment, bei dem mit Hilfe von Eisenfeilspänen auf einer Glasplatte das Magnetfeld eines Stabmagneten sichtbar gemacht wird. Bild 3.1: Feldlinien dargestellt durch Eisenfeilspäne bei einem Stabmagneten Man erkennt, dass sich die Späne im Magnetfeld ausrichten. Sowohl die Orientierung der Späne als auch deren Dichte ist ortsabhängig. Das deutet schon darauf hin, dass wir es wieder mit einem Vektorfeld zu tun haben. Am dichtesten liegen die Späne an den Enden des Stabes, die als Pole bezeichnet werden. Die Feldlinien, die durch den Versuch sichtbar gemacht werden, treten aus dem einen Pol aus und in den anderen wieder ein. Eine willkürliche Definition legt fest, dass sie aus dem Nordpol austreten und in den Südpol eintreten. Dies kann dadurch sichtbar gemacht werden, dass man eine Magnetnadel in das Feld bringt und sie um den Stabmagneten herum bewegt. In der einfachsten Anordnung (wie hier beim Stabmagneten) gibt es genau einen Nord- und einen Südpol. Die Pole treten immer paarweise auf. Wenn es einen Nordpol gibt, muß es auch irgendwo einen Südpol geben und umgekehrt. Später werden wir sehen, dass es auch Anordnungen mit mehr als zwei Polen gibt. Die Anzahl ist aber immer durch zwei teilbar. Betrachtet man nur den Stabmagneten, so könnte man zu dem Schluß kommen, dass die Pole die Quellen und Senken der Feldlinien sind. Dieser Eindruck entsteht aber nur deshalb, weil man in den Stabmagneten nicht hinein schauen kann. Tatsächlich ist es so, dass magnetische Feldlinien 26 immer in sich geschlossen sind. Innerhalb des Magneten ist die Orientierung der Feldlinien vom Südpol zum Nordpol. Wir haben es hier also mit einem quellenfreien Feld zu tun. Daher ist die mathematische und physikalische Beschreibung des elektrischen Feldes nicht auf das magnetische Feld übertragbar. Der Stabmagnet und die Kompaßnadel sind sogenannte Permanentmagneten. Sie sind irgendwann einmal magnetisiert worden und haben sich den Magnetismus sozusagen gemerkt. Eine andere Klasse von Magneten sind die Elektromagneten. Sie zeigen nur dann magnetische Erscheinungen, wenn eine sogenannte Erregung existiert. Wird die Erregung abgeschaltet, verschwindet der Magnetismus. Wir werden uns nun die Grundlagen des magnetischen Feldes erarbeiten, indem wir elektrisch erregte Magnete betrachten. Oersted und Ampère haben schon im 19. Jahrhundert herausgefunden, dass sich bewegte Ladungsträger mit einem Magnetfeld umgeben. Wird der Strom zu Null, d.h. kommen die Ladungsträger zur Ruhe, verschwindet auch das Magnetfeld. Wir betrachten nun einen geraden zylindrischen Leiter, der senkrecht auf der Zeichenebene steht. Wenn in diesem Leiter ein Strom fließt, umgibt er sich mit konzentrischen Feldlinien. Bild 3.2: Stromdurchflossener Leiter und sein Magnetfeld Der Punkt in der Darstellung des Leiters soll anzeigen, dass der Strom auf den Betrachter zufließt. Das Kreuz bedeutet, dass der Strom vom Betrachter wegfließt. Zur einfachen Richtungszuordnung der magnetischen Feldlinien und des elektrischen Stromes finden die Rechtsschraubenregel bzw. die Rechte-Hand-Regel Verwendung. 27 I Bild 3.3: Rechte-Hand-Regel Wenn der Daumen der rechten Hand in Richtung des fließenden Stromes weist, zeigen die gekrümmten Finger die Richtung der Feldlinien an. 3.2 Magnetischer Fluss und Flussdichte (Induktion) Die Gesamtheit aller magnetischen Feldlinien bezeichnen wir als magnetischen Fluss Φ. Da die Feldlinien an bestimmten Stellen dichter verlaufen als an anderen, ist es sinnvoll, eine Flussdichte zu definieren. Da die Feldlinien eine ortsabhängige Orientierung besitzen wird die ! Flussdichte allgemein als Vektor B definiert. Synonym zum Begriff magnetische Flussdichte wird auch häufig der Begriff magnetische Induktion verwendet. Die Einheit des magnetischen Flusses ist 1Vs, die der Flussdichte ist demzufolge 1Vs/m2 = 1 Tesla = 1T. Es gilt: Φ= ! ! BdA ∫ A Umfaßt die Fläche A alle Feldlinien, so ergibt die Integration den Gesamtfluss. Wird nur ein Teil der Feldlinien von der betrachteten Fläche erfaßt, so erhält man einen Teilfluss. Die Flächennor- ! male dA muß dabei nicht parallel zu den Feldlinien stehen. 28 A2, Φ A1, Φ Bild 3.4: Fluss und Flussdichte Wenn das Feld in bestimmten Abschnitten homogen ist, vereinfacht sich die Berechnung zu Φ = B⋅ A A B Bild 3.5: Homogenes magnetisches Feld Wie ein Vergleich des elektrischen Strömungsfeldes, des elektrostatischen Feldes und des Magnetfeldes ergibt, werden der elektrische Strom I, der elektrische Verschiebungsfluß Ψ und der magnetische Fluss Φ auf ganz ähnliche Art beschrieben. Das gleiche gilt für die Stromdichte S, die Verschiebungsflussdichte D und die magnetische Flussdichte B. Allerdings fließt nur beim elektrischen Strom wirklich etwas, nämlich die Ladungsträger. Im elektrischen Strömungsfeld und im elektrostatischen Feld haben wir als Ursache für die Entstehung eine Potentialdifferenz bzw. eine elektrische Spannung identifiziert. Auch im magnetischen Feld untersuchen wir nun die Ursache. 3.3 29 Durchflutung und magnetische Feldstärke, Durchflutungsgesetz Wir haben schon einmal festgestellt, dass ein Magnetfeld immer dann entsteht, wenn sich Ladungsträger bewegen, d.h. wenn ein elektrischer Strom fließt. Wir betrachten nun eine Fläche im Raum, durch die Ladungsträger in einer beliebigen Richtung und Intensität hindurchtreten. Das Integral der Stromdichte über dieser Fläche nennen wir nun nicht Strom, wie in Kapitel 2, sondern wir führen die Durchflutung Θ ein: ! ! Θ = ∫ SdA A Wir gehen nun einen Schritt weiter und nehmen an, dass die Fläche A nur an ganz bestimmten Stellen von elektrischen Leitern durchdrungen wird. In diesen Leitern fließen Ströme unterschiedlicher Richtung und Stromstärke. i1 i2 Feldlinie i3 Bild 3.6: B Durchflutung einer Fläche im Raum Außerhalb der Leiter ist die Stromdichte Null. Die Integration der Stromdichte über der Leiterfläche liefert den Strom im jeweiligen Leiter. Dabei muß das Vorzeichen beachtet werden. Θ = i1 + i2 − i3 Man sieht, dass die Durchflutung der Fläche in diesem Beispiel auch zu Null werden kann, nämlich dann, wenn i3= i1+i2. Andererseits kann man einen einzigen Leiter mehrfach durch die Fläche führen, indem man eine Spule wickelt. Dann ist die mit Hilfe eines einzigen Stromes erzeugte Durchflutung gleich ! ! Θ = ∫ SdA = N ⋅ i A mit der Windungszahl N. Rein formal ist damit die Einheit der Durchflutung die des Stromes, also Ampère. Viel gebräuchlicher ist allerdings der Begriff Ampèrewindungen. Die Intensität des Magnetfeldes nimmt mit dem Abstand vom verursachenden Strom ab. Wir führen nun den Begriff Magnetische Feldstärke H ein. Sie entsteht aufgrund des Stromes. 30 Die Feldstärke ist ein Vektor, da die Feldlinien an unterschiedlichen Orten in unterschiedliche Richtungen zeigen. Wir betrachten zunächst wieder einen einzelnen stromdurchflossenen Leiter. I H Bild 3.7: Magnetische Feldstärke Da es sich um ein ebenes Problem handelt, nimmt die Feldstärke außerhalb des Leiters mit 1/r ab. Anders ausgedrückt ist das Produkt aus der Feldstärke und der Länge der Feldlinien für alle Feldlinien konstant. Diese Tatsache kann man auch allgemeiner formulieren: Wenn man einen Weg definiert, der einen Leiter oder eine Gruppe von Leitern umschließt, dann muß die Integration der Feldstärke auf diesem Weg die Ursache, also die Durchflutung ergeben. Dabei muß der Weg nicht kreisförmig sein, sondern er kann beliebig sein. Er muß auch nicht entlang einer Feldlinie verlaufen, muß aber in sich geschlossen sein. ! ! ! ! ∫ Hds = Θ = ∫ SdA A Aus der Gleichung, die als Durchflutungsgesetz bezeichnet wird, ist zu ersehen, dass die magnetische Feldstärke die Einheit A/m besitzt. S dA ds H Bild 3.8: Beliebiger Integrationsweg zur Ermittlung der Durchflutung aus der Feldstärke 31 Als Beispiel wenden wir nun auf einen einzelnen stromdurchflossenen Leiter das Durchflutungsgesetz an. Außerhalb des Leiters gilt für jede Feldlinie: H ⋅ 2π r = I oder H= I 2π r Innerhalb des Leiters ist immer nur der Anteil des Stromes erfaßt, der vom Integrationsweg umschlossen wird. H ⋅ 2π r = I 2 2 πr πR oder H= I r 2π R 2 Bringt man nun in der graphischen Darstellung der beiden Ergebnisse noch die Richtung der magnetischen Feldstärke ein, ergibt sich folgendes Bild: H H0 1 H0 0,5 H R Bild 3.9: 2R 3R 4R r Feldstärke innerhalb und außerhalb eines vom Strom I durchflossenen Einzelleiters 32 Wir erweitern jetzt das Beispiel auf eine sogenannte Coax-Leitung. In dieser Leitung fließt der Strom I im Innenleiter hin und im Mantel zurück. I r ra ri rD I Bild 3.10: Koaxialkabel Für den Innenraum gelten die Ergebnisse von oben. Interessant ist nun, was innerhalb des Mantels und im Außenraum passiert. Die Stromdichte im Mantel ist ebenfalls konstant, jedoch eine andere als im Innenleiter. Also gilt innerhalb des Mantels: SM = I π (r − ri 2 ) 2 a Das Durchflutungsgesetz liefert hier r 2 − ri 2 I 2 2 dA = I ⋅ 1 − 2 2 − π − r r r r ( ) a i a i Ai Aa ! ! ∫ Hds = H ⋅ 2πr = Θ = I − ∫ 33 Die Durchflutung wird am Außenrand des Mantels zu Null. Außerhalb des Mantels fließt kein Strom. Damit ist das Ergebnis für den gesamten Außenraum ebenfalls Null. Der Feldstärkeverlauf ist damit H I r I Bild 3.11: Verlauf der magnetischen Feldstärke bei einer Coax-Leitung Dieses Ergebnis bedeutet, dass in einer Coax-Leitung ein beliebig großer Strom fließen kann, ohne dass außen eine magnetische Wirkung meßbar ist. Das ist eine wichtige Eigenschaft der Leitung im Hinblick auf EMV (Elektromagnetische Verträglichkeit). Die Coax-Leitung stört keine anderen elektromagnetischen Bauteile in ihrer Nähe durch äußere magnetische Felder. Voraussetzung ist allerdings, dass im Mantel immer genau der Strom zurückfließt, der im Innenleiter hin fließt. 3.4 34 Magnetische Spannung, magnetischer Widerstand, Permeabilität, magn. Feldkonstante, Hysterese Sowohl die Durchflutung Θ als auch die magnetische Feldstärke H sind unabhängig vom Material, in dem sich die Feldlinien ausbreiten. Dies illustriert auch das obige Beispiel. Der magnetische Fluss Φ und dessen Dichte sind jedoch bei gegebener Durchflutung davon abhängig. Es gibt magnetisch schlecht leitende und magnetisch gut leitende Stoffe. Im Vakuum gilt: ! ! B = µ0 H Die Beträge der Vektoren sind über die magnetische Feldkonstante oder Permeabilitätskonstante µ0 miteinander verknüpft. Die Richtungen beider Vektoren sind immer gleich. µ 0 = 4π ⋅ 10 −7 Vs Vs = 1,2566 ⋅ 10 −6 Am Am Die besten magnetischen Leiter sind die ferromagnetischen Stoffe. Aus dem Namen ergibt sich schon, dass das Eisen dazu gehört. Nickel, Kobalt und manche Legierungen gehören ebenso zu dieser Stoffgruppe. Bei ihnen ist der Faktor µ zwischen B und H wesentlich größer als µ0. Ganz ähnlich wie im elektrostatischen Feld formuliert man allgemein ! ! ! B = µH = µ r µ 0 H Die relative Permeabilität µr liegt bei Eisen im Bereich einige 1000 bis 50000. Der Ferromagnetismus besteht bei allen betroffenen Werkstoffen nur bis zu einer bestimmten Temperatur, der Curie-Temperatur. Wird diese Temperatur überschritten, verschwindet der Ferromagnetismus schlagartig. Die Curie-Temperatur ist werkstoffabhängig. Bei Eisen z.B. beträgt sie 760 °C. Wenn den Feldlinien ein zumindest teilweise geschlossener Weg durch Eisen angeboten wird, konzentriert sich ein großer Teil des Flusses im Eisen. Nur noch wenige Feldlinien wählen einen Weg mit höherem magnetischen Widerstand am Eisen vorbei, z.B. durch die umgebende Luft. Wickelt man einige Windungen eines isolierten Leiters auf einen Eisenkern, so kann man im Inneren der so entstandenen Spule mit dem gleichen Strom eine wesentlich höhere Induktion erreichen als wenn man den Eisenkern entfernt. Ist der Eisenkern so geformt, dass er einen geschlossenen Weg für die Feldlinien anbietet, so konzentriert sich fast der gesamte Fluss im Eisen. Selbst wenn eine kurze Luftstrecke zu überwinden ist, gilt dies immer noch. 35 Φ Kern (Eisen) I, Θ A Luftspalt B Spule (Windungszahl N) Bild 3.12: Magnetkreis mit geringem magnetischen Widerstand Wir haben bisher analog zum elektrischen Widerstand schon mehrmals den Begriff Magnetischer Widerstand benutzt, ohne ihn genau zu definieren. Das soll jetzt geschehen. Im obigen Bild verlaufen alle Feldlinien im Eisen und überwinden die Luft nur in dem kleinen dargestellten Spalt. Damit ist der gesamte Fluss Φ im Eisen konzentriert. Wenn man davon ausgeht, dass der Luftspalt sehr klein ist ( im Bild ist er zur Verdeutlichung recht groß dargestellt), dann werden die Feldlinien auch in der Luft parallel verlaufen und sich nicht nach außen ausbeulen. Damit ist die Fläche A, innerhalb derer sich der Fluss ausbildet, überall konstant. Ohne Berücksichtigung der Ecken und Kanten des Eisens nehmen wir an, dass dann auch die Flußdichte B überall konstant ist. Da jedoch die Permeabilität in Eisen und Luft stark unterschiedlich ist, muß die Feldstärke in Eisen und Luft unterschiedlich sein. Um die Feldstärke zu bestimmen, integrieren wir entlang der “neutralen Faser” im Eisen. Ihre Länge ist ein Mittelwert der Länge aller Feldlinien. Es gilt: ! ! Hds ∫ = ∫ Hds = ∫ H E ds + ∫ H L ds = Θ = N ⋅ i lE lL H E ⋅ lE + H L ⋅ l L = VE + V L = Θ VE und VL werden als magnetischer Spannungsabfall bezeichnet. Die Summe aus beiden ergibt die magnetische Urspannung, die gleich der Durchflutung ist. Für beide Stoffe getrennt kann jetzt der Quotient aus dem individuellen Spannungsabfall und dem Fluss (der für beide gleich ist) gebildet werden: VL H L ⋅ l L lL V H ⋅l lE RmE = E = E E = = = ; RmL = B⋅ A B⋅ A Φ Φ µE ⋅ A µ0 ⋅ A 36 Damit sind die magnetischen Widerstände der Eisen- und der Luftstrecke definiert. Mit ihrer Hilfe wird aus dem Durchflutungsgesetz für die obige Anordnung Θ = VE + V L = ( RmE + RmL ) ⋅ Φ Untersucht man ferromagnetische Werkstoffe genauer, stellt man fest, dass die Permeabilität keine Konstante ist. Vielmehr ist sie abhängig von der magnetischen Feldstärke. Bei kleiner Feldstärke ist die Permeabilität recht groß und wird mit wachsender Feldstärke kleiner. Anders ausgedrückt heißt das, dass die Funktion B=f(H) für Luft linear (allerdings mit sehr kleiner Steigung), für ferromagnetische Stoffe jedoch nicht linear ist. B Entmagnetisierung Sättigung A Br Neukurve Hc H Bild 3.13: Hystereseschleife Bei steigender Feldstärke stellen wir eine Sättigung des Materials fest. Das heißt, man muß eine immer größere Steigerung der Feldstärke ΔH aufbringen, um die Induktion um einen bestimmte Betrag ΔB zu steigern. Hat man eine bestimmte Feldstärke eingestellt und reduziert sie wieder auf Null, indem man den verursachenden Strom zu Null macht, bleibt ein Restmagnetismus. Dieser Restmagnetismus wird als Remanenzinduktion Br bezeichnet. Um die Induktion zu Null zu machen, muß nun eine Feldstärke mit umgekehrter Richtung erzeugt werden. Das Material wird dadurch entmagnetisiert. Die Feldstärke, die notwendig ist, um das Material vollständig zu entmagnetisieren, heißt Koerzitivfeldstärke Hc. Die Neukurve wird nur ein einziges Mal durchfahren. Man kommt nicht wieder in den Ursprung zurück. Dieses Verhalten kann dadurch erklärt werden, dass sich innerhalb des Materials Atom- bzw. Molekülverbände bilden, die sich nach und nach magnetisch ausrichten. Es bilden sich Kreisströme aus, die die von außen eingeprägten Feldlinien umschließen und so den Magnetismus verstärken. Die Ausrichtung der einzelnen Bereiche (Weiß´sche Bezirke) geschieht nach und nach. Sind alle Bereiche ausgerichtet, ist eine weitere Feldverstärkung nicht mehr möglich. Die Ausrichtung bleibt zum Teil erhalten, wenn die äußere Durchflutung wieder entfernt wird. Es ist ein Magnet entstanden. 37 Verstellt man die Feldstärke zwischen zwei absolut gleichen positiven und negativen Werten, erhält man die oben dargestellte Hysteresekurve. Jedes ferromagnetische Material hat eine charakteristische Hysteresekurve. Die Unterschiede liegen im wesentlichen in Br und Hc . Ein Material mit geringer Koerzitivfeldstärke heißt weichmagnetisch. Es ist besonders gut für Anwendungen geeignet, wo die Feldstärke ständig ihre Polarität wechselt. Hartmagnetisches Material mit großem Hc ist gut für Dauermagnete geeignet. B B H Hc Bild 3.14: Hc H Hysteresekurven eines hartmagnetischen und eines weichmagnetischen Werkstoffs Erzeugt man bei einem bestimmten Werkstoff unterschiedliche Hysteresekurven, indem man die Extremwerte der Feldstärke nach und nach steigert und trägt man die Wertepaare in den Spitzen auf, erhält man die Magnetisierungskurve des Materials. 38 [T] B [T] H [A/m] H [A/m] B 1 = kornorientiertes Blech in Walzrichtung magnetisiert 2 = Dynamoblech und Stahlguß Bild 3.15: 3 = legiertes Blech 4 = Gußeisen Magnetisierungskurven unterschiedlicher Materialien 3.5 39 Lorentzkraft, Induktionsgesetz, Generator Bringt man eine elektrische Ladung Q mit Hilfe eines elektrischen Feldes E auf eine bestimmte Geschwindigkeit v und schießt sie in ein magnetisches Feld mit der Induktion B, so stellt man fest, dass sich dort die Bewegungsrichtung der Ladung ändert. Dieser Effekt wird ausgenutzt bei der Elektronenstrahlröhre. Dort werden die Elektronen mit Hilfe einer Hochspannung (einige kV) in Vakuum von der Kathode in waagerechter Richtung zum Bildschirm hin beschleunigt. Die Zielrichtung ist dabei genau der Mittelpunkt des Bildschirms. Treffen die Elektronen dort auf, erzeugen sie in der Beschichtung des Bildschirms eine Leuchterscheinung. Die Röhre ist mit zwei Spulen bewickelt, die als Ablenkspulen bezeichnet werden. Eine ist dabei für die horizontale, eine für die vertikale Ablenkung zuständig. Fließt in diesen Spulen ein Strom, so entsteht in einem bestimmten Bereich des Weges, den die Elektronen zurücklegen, ein Magnetfeld. Durch geschickte koordinierte Veränderung der Ströme in den beiden Spulen wird erreicht, dass der Elektronenstrahl zeilenweise vom linken oberen Rand der Bildröhre bis zum rechten unteren Rand wandert. Wenn dieser Vorgang häufiger als 80 mal pro Sekunde wiederholt wird, bekommt das menschliche Auge davon nichts mit und sieht nur ein vom Elektronenstrahl erzeugtes Bild. Die Helligkeit der einzelnen Bildpunkte kann über die elektrische Feldstärke, also über die Kathodenspannung verändert werden. Bei der Ablenkung handelt es sich um die technische Nutzung der Lorentzkraft. ! ! ! F = Q ⋅ ( ν × B) Bei gegebener Geschwindigkeit und gegebener Induktion wird die Kraft dann maximal, wenn die Bewegungsrichtung der Ladungsträger senkrecht auf der Richtung der magnetischen ! ! Feldlinien steht. Die Kraftrichtung wiederum steht senkrecht auf der von ν und B aufgespannten Fläche. Fm v B q Bahnkurve eines Ladungsträgers B-Feldlinie Bild 3.16: Kraft auf eine bewegte Ladung im Magnetfeld Zwingt man die Ladungsträger, sich entlang einer Geraden zu bewegen, indem man einen linienhaften Leiter in ein Magnetfeld bringt und in ihm einem Strom fließen lässt, so ist die Summe aller Kräfte auf die bewegten Ladungsträger als Kraft auf den Leiter messbar. 40 Die Anzahl der Ladungsträger, die zur Kraftbildung beiträgt, ist dabei proportional der Länge l des Leiterabschnitts, der sich im Magnetfeld befindet. Wir betrachten zunächst infinitesimal kleine Kräfte und Ladungen ! ! ! ! ! dF = dq ⋅ (ν × B) = dq ⋅ ( ds ⋅ eν × B) dt ! ! dq ! ! = ⋅ (ds ⋅ eν × B) = I ⋅ ds ⋅ (eν × B) dt ! Dabei ist ev der Einheitsvektor der Bewegungsgeschwindigkeit. Er zeigt in Richtung des Leiters. Die Integration dieser Gleichung über die Länge l liefert ! ! ! F = I ⋅ ( l × B) Hier wird die Kraft maximal, wenn der Leiter senkrecht auf den Feldlinien steht. Die Kraft versucht, den Leiter zur Seite hin auszulenken. Fl i l B i Bild 3.17: Kraft auf einen stromdurchflossenen Leiter im Magnetfeld Wir haben hiermit eines der Grundprinzipien elektromechanischer Energiewandler kennengelernt. In Elektromotoren wird auf diese Art eine Kraft bzw. ein Drehmoment erzeugt. Wie wir wissen umgibt sich jeder stromdurchflossene Leiter mit einem eigenen Magnetfeld. Das fremd erzeugte Magnetfeld und das eigene überlagern sich nun. F I Bild 3.18: I Stromdurchflossener Leiter im Magnetfeld: Resultierendes Magnetfeld 41 Man kann den Ladungsträgern auch dadurch, dass man den Leiter bewegt, innerhalb des Magnetfeldes eine Geschwindigkeit verleihen. Wir nehmen an, dass der Leiter quer zu seiner Achse und quer zum Magnetfeld bewegt wird. Ein Stromfluß im Leiter ist nicht notwendig. Die durch die Bewegung entstehende Kraft auf die Ladungsträger wirkt nun in Richtung der Leiterachse. Die Elektronen werden in Bewegungsrichtung gesehen nach rechts gedrängt. Auf der linken Seite bleiben positiv geladene Ionen zurück. N ++ ++ ++ v B ---- l S Bild 3.19: Bewegter Leiter im Magnetfeld Durch die Ladungsträgerverschiebung entsteht eine elektrische Feldstärke im Leiter. ! ! ! ! F = E=ν ×B Q Stehen Leiterachse, Magnetfeld und Geschwindigkeit senkrecht aufeinander und ist l die Länge des Leiters, die sich im Magnetfeld befindet, so kann zwischen den Leiterenden folgende Spannung gemessen werden: ! ! ui = ∫ Eds = ν ⋅ B ∫ ds = ν ⋅ B ⋅ l l l Diese Spannung wird als induzierte Spannung bezeichnet. Damit ist das zweite Grundprinzip elektromechanischer Energiewandler formuliert. Mit Hilfe dieses Effektes kann man einen Generator bauen, der eine elektrische Spannung liefert. Beide Effekte kann man auch überlagern, indem man den Leiter bewegt und gleichzeitig in ihm einen Strom fließen läßt. Auf der mechanischen Seite existieren dann Geschwindigkeit v und Kraft F. Auf der elektrischen Seite existieren eine Spannung U und ein Strom I. Die mechanisch aufgebrachte Leistung wird dem System auf der elektrischen Seite entnommen oder umgekehrt. 42 P = F ⋅ν = U ⋅ I Wickelt man den Leiter zu einer Spule und setzt alle Windungen der Spule dem Magnetfeld aus, so kann man bei gegebener Geschwindigkeit und gegebenem Strom die Kraft und die Spannung vervielfachen. Der Multiplikator ist die Windungszahl N. Das Phänomen der induzierten Spannung werden wir jetzt noch einmal betrachten, um ein allgemeines Induktionsgesetz aufzustellen. dA ds Ui Schleifdraht l Fq B v Bild 3.20: Messanordnung für die induzierte Spannung Das bewegte Leiterstück und die Messleitungen bilden eine Leiterschleife. Wenn man das betrachtete Leiterstück quer zum Magnetfeld bewegt, verändert man die von der Leiterschleife umschlossene Fläche. dA = l ⋅ ds Damit ändert sich auch der von der Leiterschleife umschlossene magnetische Fluss dΦ = B ⋅ dA ui = B ⋅ l ⋅ ν = B ⋅ l ⋅ ds dΦ = dt dt Die induzierte Spannung ist der Änderung des Flusses in der Leiterschleife proportional. Damit eröffnet sich eine weitere Möglichkeit, eine Spannung zu induzieren. Es ist nicht notwendig, eine Bewegung auszuführen. Wenn man durch einen veränderlichen Strom in der Erregerspule dafür sorgt, dass sich der Fluss in der Leiterschleife ändert, entsteht ebenfalls eine induzierte Spannung. Auch hier gilt, dass man die induzierte Spannung vervielfachen kann, indem man statt einer Leiterschleife eine Spule verwendet, die die Windungszahl N hat und an deren Leiterenden misst. 43 F UI if Bild 3.21: F I Uf Feld- und Induktionsspule ui = N ⋅ dΦ dΨ = dt dt Dieser Zusammenhang wird als Induktionsgesetz bezeichnet. Die Größe Ψ hat den Namen Verkettungsfluß. Sie ergibt sich rein rechnerisch durch Multiplikation der Windungszahl N mit dem Fluss Φ. 3.6 Selbstinduktion, Gegeninduktion, Induktivität, Transformator, Wirbelströme, Skineffekt Betrachtet man wiederum das obige Bild genauer, dann kommt man zu der Erkenntnis, dass der Vorgang der Induktion nicht nur in der Induktionsspule sondern auch in der verursachenden Feldspule auftreten muß. Im stationären Fall, d. h. bei konstantem Strom If und damit konstantem Fluss Φf ist eine konstante Spannung Uf notwendig, um den Strom durch den ohmschen Widerstand Rf der Feldspule aufrecht zu erhalten. Wird allerdings der Fluss geändert, dann entsteht eine zusätzliche Spannung uif. u f = R f ⋅ i f + uif = R f ⋅ i f + N f dΦ f dt Die Spannung uif entsteht durch Selbstinduktion. Sie entsteht auch dann, wenn die Induktionsspule im obigen Bild gar nicht vorhanden ist, da diese sich rein passiv verhält und den Fluss nicht verändert. Wir drücken nun den Fluss in der Feldspule durch den erregenden Strom aus. Dabei lassen wir den Index f weg, weil nur noch eine einzige Spule betrachtet wird. ui = N A di N 2 di di dΦ A dΘ = Nµ 0 µ r = N 2 µ0 µr = = L dt l dt l dt Rm dt dt Die induzierte Spannung in der Spule ist der zeitlichen Änderung des Stromes proportional. Der Proportionalitätsfaktor L wird als Induktivität der Spule bezeichnet. 44 Die Einheit der Induktivität ist das Henry. 1 Henry = 1H = 1 Ωs = 1 Vs/A. Die Induktivität und der Fluss sind über folgende Gleichung verknüpft: L⋅i = N 2 i Θ = N = NΦ = Ψ Rm Rm Die Induktivität erzeugt bei Stromänderung eine Spannung, die der verursachenden außen anliegenden Spannung entgegen wirkt. Zur Aufrechterhaltung eines konstanten Stromes in einer Induktivität ist eine verhältnismäßig kleine Spannung zur Überwindung des kleinen ohmschen Widerstandes notwendig. Will man den Strom in einer Induktivität ändern, muß man eine zusätzliche Spannung anlegen. Je größer diese Spannung, desto schneller ändert sich der Strom. Zur Verringerung des Stromes ist eine negative Spannung notwendig. Bei der idealen Induktivität (R = 0) geht der Strom linear gegen unendlich, wenn an den Klemmen eine konstante Spannung anliegt. Legt man für eine bestimmte Zeit an eine ideale Induktivität eine Spannung uL an, so ändert sich der Strom von einem Anfangswert i0 auf einen neuen Wert i1. Die Spannung uL muß während dieser Zeit nicht konstant sein. t 1 1 i1 − i0 = ∫ u L (t ) dt L t0 Zur Änderung des Stromes ist also eine Spannungszeitfläche notwendig. uL t0 t1 t i i1 i0 t Bild 3.22 Spannung und Strom an der idealen Induktivität Wird eine ideale vom Strom I durchflossene Spule über einen Widerstand kurzgeschlossen, so entsteht in dem Widerstand durch den Strom Wärmenergie. Diese Energie war vorher im Magnetfeld der Spule gespeichert. Nach theoretisch unendlicher Zeit kommt der Stromfluss zum erliegen. 45 ∞ W = ∫ uL ⋅ i L = 0 ∞ ∫ 0 di L L i dt = dt L I ∫ Li L di L = 0 1 2 LI 2 Wenn man in einer Spule einen Strom erzeugt, kann man demzufolge auch vom Laden der Spule sprechen. Man speichert auf diese Art eine magnetische Energie im Magnetfeld der Spule, die man anschließend wieder in elektrische und dann in andere Energieformen umwandeln kann. Schaltet man mehrere Spulen in Reihe, so erzeugt man mit dem gleichen Strom I in allen Spulen ein individuelles Magnetfeld. Die dabei gespeicherte Gesamtenergie ist die Summe der Einzelenergien. Also gilt: Lges = L1 + L2 + .....+ Ln I L1 Bild 3.23: L2 L3 L4 .... Ln Reihenschaltung von Induktivitäten Schaltet man mehrere ideale Spulen parallel, so liegen alle Spulen an der gleichen Spannung. Für die Änderungsgeschwindigkeit des Gesamtstromes gilt: di di di1 di2 U U U U = + + ....+ n = + + ....+ = dt dt dt dt L1 L2 Ln Lges 1 1 1 1 = + + ....+ Lges L1 L2 Ln i Bild 3.24: L1 L2 i1 i2 L3 i3 L4 Ln i4 in Parallelschaltung von Induktivitäten Bei der Parallelschaltung ist die Gesamtinduktivität kleiner als die kleinste Einzelinduktivität. Wir kommen jetzt noch einmal zurück auf ein System aus zwei Spulen, die magnetisch miteinander gekoppelt sind (siehe Bild 3.21). Wir hatten gesehen, dass sich immer dann, wenn der Fluss in der Induktionsspule sich ändert, an deren Klemmen eine induzierte Spannung zu messen ist. 46 Bei genauerer Betrachtung dieser Anordnung stellt man fest, dass der magnetische Fluss in der Erregerspule und in der Induktionsspule nicht identisch sein müssen. Es kann nämlich durchaus einige wenige Feldlinien geben, die von der Erregerspule erzeugt werden, aber nicht die Induktionsspule durchsetzen. Alle Feldlinien, für die dies zutrifft, zählen zum sogenannten Streufluß. Der Flussanteil, der beide Spulen durchsetzt, wird Hauptfluss genannt. Bei gut gewählter Anordnung ist der Hauptfluss immer wesentlich größer als der Streufluss. Wir nehmen zunächst an, dass die Verkettung der beiden Spulen ideal sei. Es existiert kein Streufluss. N1 Φ Φ 1σ N2 Φ2 Φ 1 i1 Φ h i2 R1 R2 u1 Bild 3.25: 2σ u2 Haupt- und Streufluß bei gekoppelten Spulen Damit gilt: Φ f = Φi = Φ Wenn sich nun der Fluss ändert, wird in der Erregerspule eine andere Spannung induziert als in der Induktionsspule. dΦ dt dΦ uf = N f dt ui Ni = uf Nf ui = N i Die Spannungen verhalten sich zueinander wie die Windungszahlen. Diese Tatsache wird als Transformatorprinzip bezeichnet. Der Transformator wird uns später noch beschäftigen. 47 Nun ist es ebenso leicht möglich, einen Zusammenhang zwischen der Stromänderungsgeschwindigkeit in der Erregerspule und der induzierten Spannung in der Induktionsspule zu formulieren. ui = N i di f N i N f di f dΦ A dΘ f = N i µ0 µr = = M dt dt l dt Rm dt Der Koeffizient M wird Gegeninduktivität genannt. Eine bekannte Anwendung ist die Zündspule. Auch hier handelt es sich um ein System von zwei gekoppelten Spulen. Die eine Seite (Primärseite), die über einen Schalter von der Batterie gespeist wird, also mit U = 12 V, hat eine kleine Windungszahl N1 # 200. Die zweite Seite (Sekundärseite, Hochspannungsseite) hat eine sehr hohe Windungszahl N2 # 25000. Schließt man den Schalter, so wird das Magnetfeld aufgebaut. Dabei liegt an der Primärseite 12V an, an der Sekundärseite eine entsprechend höhere Spannung, die aber noch nicht ausreicht, um an der Zündkerze einen Funken zu erzeugen. Wird jetzt der Schalter wieder geöffnet, so wird der Strom dort innerhalb von 1 oder 2 Millisekunden abgebaut (großes negatives di/dt, viel größer als das positive di/dt beim Aufladen). Damit bricht auch der Fluss zusammen. Auf der Seite, an der die Zündkerze angeschlossen ist, entsteht dabei eine Spannung von mehreren kV. Diese Spannung reicht aus, um die Durchschlagsfeldstärke der Luft zwischen Mittelelektrode und Masseelektrode der Zündkerze zu erreichen. Der Zündfunke entsteht. Von den älteren mechanischen Zündanlagen wissen wir, dass auch der Unterbrecherkontakt auf der Primärseite durch die hohe Spannung zum Zeitpunkt des Öffnens beansprucht wird. Auch dort können gelegentlich Funken entstehen, die zu Materialabbrand führen. Neuere elektronische Zündungen sind dagegen so konstruiert, dass sie auf der Primärseite wartungsfrei arbeiten. Werden nun die Verhältnisse umgekehrt, d. h. in der Sekundärspule ändert sich der Strom und in der Primärspule wird dadurch eine Spannung induziert, so ist die Gegeninduktivität die gleiche. M 12 = M 21 = M = L1 ⋅ L2 Ist die Kopplung nicht ideal und bilden sich Streuflüsse, so muß ein Koppelfaktor eingeführt werden. Dazu definieren wir zunächst einen Streufaktor σ. Er beschreibt die relative Abweichung der Gegeninduktivität vom Ideal. M2 σ = 1− L1 ⋅ L2 oder M = 1− σ L1 ⋅ L2 = k L1 ⋅ L2 Bei der idealen Kopplung ist der Streufaktor gleich 0. Wenn überhaupt keine Kopplung der Spulen besteht, ist er gleich 1. Der Faktor k heißt Koppelfaktor. Für ihn sind die Verhältnisse umgekehrt. 48 Eine magnetische Kopplung ist nicht immer erwünscht. In elektrischen und elektronischen Schaltungen lautet häufig die Forderung, dass durch Stromänderungen in Spulen keine Spannungen in benachbarten Leiterschleifen induziert werden sollen (EMV). Dann ist durch geeignete Maßnahmen dafür zu sorgen, dass der Koppelfaktor möglichst klein wird. Geeignete Maßnahmen sind z.B.: - Die aufgespannte Fläche muß klein sein, damit der Fluss, der sie durchsetzt, klein ist - Spulenachsen so anordnen, dass sie 90° zueinander gedreht sind. Die durchdrungene Fläche wird dann Null. - Verdrillen von Hin- und Rückleiter einer gefährdeten Leitung. Dadurch heben sich die induzierten Spannungen in den einzelnen Leitungsabschnitten gegenseitig auf. - ferromagnetische Abschirmung, die die Feldlinienausbreitung verhindert a) k = 0 Bild 3.26: b) k = 1 Geringe (a) und maximale Kopplung (b) von Spulen oder Leiterschleifen Wird ein elektrisch leitfähiges Gebilde (das kann eine geschlossene Leiterschleife oder auch ein massives Stück Eisen sein) von einem sich ändernden magnetischen Fluss durchdrungen, dann wird dort eine elektrische Spannung induziert. Da ein geschlossener Weg für einen Stromfluß vorhanden ist, kommt dann aufgrund der Spannung dieser Stromfluss auch zustande. Der sich aufbauende Strom erzeugt nun selbst eine Magnetfeldänderung , die die ursprüngliche zum Teil kompensiert. Wie stark die Kompensation ist, hängt vom ohmschen Widerstand ab, der den Stromfluss hemmt. Auf diese Art entstehen in massiven Eisenteilen, die von einem sich ändernden magnetischen Fluss durchsetzt sind, die sogenannten Wirbelströme. Sie erzeugen am ohmschen Widerstand des Materials Wärmeverluste. 49 Wirbelstrom iw massiver Eisenkern B + dB Bild 3.27: Wirbelströme in einem Eisenkern Man versucht die Wirbelströme, wenn erforderlich, zu unterdrücken, indem man elektrisch schlecht leitendes Eisen verwendet und indem man den Eisenkern aus vielen dünnen Blechen aufbaut, die gegeneinander elektrisch isoliert sind. Im verursachenden Leiter selbst tritt ebenfalls ein häufig unerwünschter Effekt auf. Wir wissen, dass sich auch innerhalb eines Leiters eine magnetische Feldstärke und damit letztendlich ein magnetisches Feld aufbaut, wenn Strom in ihm fließt. Ändert sich dieser Strom und damit das Feld, so entstehen Ströme im Leiter, die durch Überlagerung mit dem ursprünglichen Strom die Stromdichte in der Mitte des Leiters verringern. Die Stromdichte wird am Rand viel größer als innen. Man spricht hier von Stromverdrängung von innen nach außen oder vom Skineffekt. iw B + dB I + dI Bild 3.28: Stromverdrängung bzw. Skineffekt 50 Der Skineffekt wird wie die Wirbelströme mit steigender Frequenz der Stromänderung immer ausgeprägter. In der Mikrowellentechnik, wo mit sehr hohen Frequenzen gearbeitet wird, läßt man das Leiterinnere sogar weg und verwendet sogenannte Hohlleiter, weil im Inneren sowieso kein Strom fließen würde. 3.7 Energien und Kräfte im Magnetfeld Ein Magnet ist, wie allgemein bekannt, in der Lage, ein Eisenstück anzuziehen. Wir wollen nun die Kraft berechnen, mit der das geschieht. Dazu betrachten wir folgende Anordnung: U I B N s v lE Tiefe b F l Bild 3.29: Entstehung einer Anziehungskraft auf ein Eisenstück Die Kraft ist immer so gerichtet, dass der magnetische Widerstand minimiert und damit die Induktivität maximiert wird. Im obigen Beispiel wirkt die Kraft so, dass durch eine durch die Kraft hervorgerufene Verschiebung der Luftspalt verkleinert wird. Wir nehmen an, dass sich das Eisen zu keinem Zeitpunkt in der Sättigung befindet. Weiter nehmen wir an, dass die Spule mit einem konstanten Strom I betrieben wird und dass der ohmsche Widerstand der Spule gleich Null ist. Durch die Änderung der Induktivität wird in der Spule eine Spannung u induziert. d N2 d d dL dI dL u= LI = I +L =I =I = IN 2 dt dt dt dt dt Rm dt = IN 2 ⋅ b ⋅ l d 1 dt l E s + µ E µ0 1 lE s + µ E ⋅ b ⋅ l µ0 ⋅ b ⋅ l 51 Die induzierte Spannung ist dann IN 2 ⋅ b ⋅ l 1 1 ds u= − l ( − ) ( µE + µs ) 2 µ0 µ E dt E 0 Wenn sich s vergrößert, verkürzt sich lE. Daher die Klammer im Zähler. Der Subtrahend in der zweiten Klammer kann allerdings vernachlässigt werden. Bewegt sich das Eisenstück mit der Geschwindigkeit v und vergrößert den Luftspalt, so ist u= − IN 2 ⋅ b ⋅ l ⋅v lE s 2 µ0 ( µE + µ ) 0 Wir nehmen nun an, dass sich der Luftspalt in der Zeit Δt um Δs verändert. Eine Vergrößerung des Luftspalts erzeugt eine negative Spannung. Die von der Stromquelle in die Induktivität gelieferte Energie ist t 0 + ∆t ∆ Wel = ∫ t0 + ∆t u ⋅ Idt = − I ⋅ N ⋅ b ⋅ l 2 2 t0 ∫ t0 s0 + ∆s = −I ⋅ N ⋅b⋅l 2 2 ∫ s0 = I 2 ⋅ N 2 ⋅b⋅ l( 1 l ( µE + µs ) 2 E 0 1 l ( µE + µs ) 2 E 0 1 lE − ∆ s s0 + ∆ s µE + µ0 ( − ( 1 1 ds ) dt − µ 0 µ E dt 1 1 )ds − µ0 µ E 1 lE s0 µE + µ0 ) = ( L( s0 + ∆ s) − L( s0 )) ⋅ I 2 Man beachte hier, dass die Induktivität bei kleinem Luftspalt größer ist als bei großem. Bei einer Vergrößerung des Luftspalts wird die aufgenommene Energie negativ. Das bedeutet, dass die Spule Energie abgibt! Die in der Induktivität gespeicherte elektrische Energie hat sich während dieses Vorganges um ΔWmagn geändert. ∆ Wmagn = L( s0 + ∆ s) 2 L( s0 ) 2 I − I 2 2 Dies ist genau die Hälfte der elektrisch aufgewendeten Energie. Die andere Hälfte ist in mechanische Energie übergegangen. ∆ Wel = 2 ∆ Wmagn = ∆ Wmagn + ∆ Wmech ∆ Wmagn = ∆ Wmech 52 Für die mechanische Energie gilt t 0 + ∆t ∆ Wmech = ∫ t0 t + ∆t 0 ds 1 1 1 1 ds F ( s) dt = − I 2 ⋅ N 2 ⋅ b ⋅ l ∫ l ( − ) dt dt 2 s ) 2 µ 0 µ E dt t0 ( E + µ E µ0 und damit durch Koeffizientenvergleich und anschließende Vernachlässigung von 1/µE 1 µ0 − 1 2 2 F ( s) = − I ⋅ N ⋅ b ⋅ l ⋅ l 2 ( µE + E =− 1 µE s 2 µ0 ) 1 2 1 Θ ⋅b⋅l l 2 µ0 ( µE + µs ) 2 E 0 1 Θ2 1 1 Φ 2 ( s) 1 2 B ( s) ⋅ b ⋅ l = ⋅ 2 =− =− 2 µ0 b ⋅ l Rm ( s) 2 µ0 b ⋅ l 2 µ0 Allgemein gilt also: F= 1 2 Β ⋅A 2µ 0 Das Vorzeichen der Kraft entsteht durch das gewählte Bezugssystem. Die Kraft auf das Eisenstück wirkt immer in Richtung des Luftspaltes. 3.8 53 Passive Bauelemente, die sich aus den bisherigen Betrachtungen ergeben Wir haben bisher den ohmschen Widerstand, den Kondensator und die Induktivität kennengelernt. Hier soll noch einmal kurz zusammengefaßt werden, wie sich diese Bauelemente in einem Stromkreis verhalten, wenn sie für eine gewissen Zeit mit einer konstanten Spannung bzw. einem konstanten Strom beaufschlagt werden. i R C i i L u u u t t t u t i= U R i = C⋅ du dt i = 1 ⋅∫u⋅dt L i u = i⋅R Tabelle 3.1: t t t u = 1 ⋅∫i⋅dt C Verhalten der passiven Grundbauelemente t u = L⋅ di dt