301 kbyte pdf
Werbung

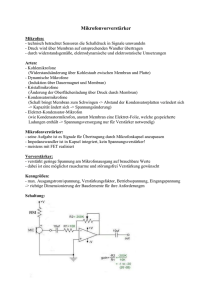
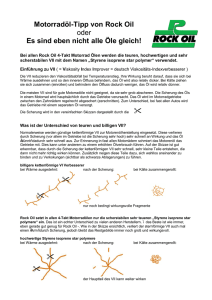
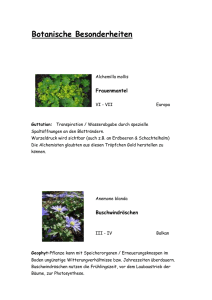
155 Elektroakustik VII Elektroakustik In der Praxis ist die Erzeugung, Verarbeitung und Aufnahme von Schall fast ausschließlich durch elektroakustische Systeme realisiert, bei denen eine Umwandlung zwischen akustischer (d. h. mechanischer) Energie und elektrischer Energie stattfindet. Aufgrund der großen praktischen Bedeutung ist es notwendig, sich mit den prinzipiellen Eigenschaften von elektroakustischen Wandlern und den dabei auftretenden Gesetzmäßigkeiten näher zu beschäftigen. VII.1 Mikrophone Das erste brauchbare Mikrophon wurde von Philipp Reis (1861), dem Erfinder des Telefons verwendet. Bei seinem Kontaktmikrophon ist eine schwingungsfähige Membran mit einer feinen Spitze verbunden, die einen Kontakt in einen mehr oder weniger leitenden Zustand versetzt. Entsprechend der Leitfähigkeit fließt ein Strom über den Kontakt und ruft am Widerstand eine pulsierende Gleichspannung hervor. Da die Kontaktänderung mehr oder weniger diskontinuierlich vor sich geht (d. h. entweder geschlossener oder offener Kontakt) handelt es sich bei dem Kontaktmikrophon um einen stark nichtlinearen Wandler, der am ehesten als ein EinBit-Quantisierer beschrieben werden kann (d. h. entweder Ausgangszustand „0“ oder Ausgangszustand „1“). Es gehört zu den erstaunlichen Eigenschaften menschlicher Sprache, daß sie selbst bei einer darartigen groben Quantisierung noch eine gewisse Verständlichkeit erhält, so daß das von Philipp Reis entwickelte Telefon trotz äußerst schlechter Sprachübertragungsqualität dennoch eine gewisse Sprachverständlichkeit ermöglichte. Abbildung 7.1: Kontaktmikrophon (schematisch) mit Membran (links), die einen Kontakt steuert, der wiederum einen Stromkreis schließt Eine bessere Abbildung des Schalldrucks in eine elektrische Spannung ist durch das später in Telefonen eingesetzte Kohlemikrophon möglich, bei dem die Membran mit einer Kohlekapsel verbunden ist, in der sich viele 156 Elektroakustik Partikel befinden, die unter Druck einen besseren Kontakt mit einer höheren Leitfähigkeit ermöglichen. Aufgrund der Vielzahl der sich bei einem bestimmten Druck ändernden Kontakte zwischen den einzelnen Kohlepartikeln ist die Leitfähigkeitsänderung dieser Kohlekapsel ungefähr proportional dem anliegenden Schalldruck, so daß ein linearer Wandler von Schallenergie in elektrische Energie resultiert. Dementsprechend ist die Aufnahmequalität von Sprachsignalen wesentlich besser als bei dem Kontaktmikrophon, obwohl der Frequenzbereich und die Linearität bei weitem nicht ideal sind. Aufgrund seiner Robustheit ist das Kohlemikrophon noch heute in vielen Telefon-Sprechgarnituren zu finden. Es handelt sich jedoch um einen nichtreversiblen Wandler, d. h. Schallenergie läßt sich zwar in elektrische Energie umwandeln, aber beim Anlegen einer elektrischen Spannung wird keine mechanische Arbeit verrichtet. Abbildung 7.2: Schematische Darstellung des Kohlemikrophons, bei dem die Membran (links) die Leitfähigkeit der Kohlekapsel moduliert. Ein lineares, reversibles Mikrophon wurde dagegen in Form des elektromagnetischen Mikrophons von Alexander Graham Bell (1876) verwendet. Bei ihm bewegt sich die mit einem magnetisierbaren Anker verbundene Membran im Feld eines Permanent-Magneten, auf dem sich eine Induktionsspule befindet. Die Membranschwingungen führen zu einer Änderung des magnetischen Flusses durch den Permanent-Magneten und damit zu einer in der Spule induzierten Wechselspannung. Mit diesem Mikrophon kann man eine wesentlich höhere Empfindlichkeit und aufgrund der Linearität eine wesentlich bessere Übertagungsqualität erreichen, so daß letztendlich der größere Erfolg des von Bell entwickelten Telefons resultierte, der ihn als den vermeintlichen Erfinder des Telefons später auszeichnete. 157 Elektroakustik Abbildung 7.3: Schema des elektromagnetischen Mikrophons Der Nachteil einer mit einer großen Masse behafteten Membran des elektromagnetischen Mikrophons wird beim elektrodynamischen Mikrophon vermieden, bei dem eine Tauchspule mit der Membran verbunden ist, die in den ringförmigen Spalt eines Topfmagneten eintaucht. Bei Bewegung der Membran mit der Geschwindigkeit v wird die Spannung Uind induziert, für die gilt: U ind = B ⋅ l ⋅ v = U a + L ⋅ I + R i ⋅ I (VII.1) Abbildung 7.4: Schematischer Aufbau des elektrodynamischen Mikrophons Dabei bezeichnet B die magnetische Induktionsflußdichte, l die Länge des Leiters im Magnetfeld quer zur Schwingungsrichtung, Ua die am Ausgangswiderstand Ra anliegende Spannung, L die Induktivität der Tauchspule, I den in der Spule fließenden Strom und Ri den Ohm’schen Widerstand (Innenwiderstand) der Tauchspule. Unter der Annahme einer sinusförmigen Schallanregung mit der Kreisfrequenz ω folgt für die Ausgangsspannung damit: Ua = B ⋅ l ⋅ v − (i ⋅ ω ⋅ L + Ri ) ⋅ I (VII.2) Die Ausgangsspannung ist damit direkt proportional zu der Geschwindigkeit (Schnelle) der Membran, so daß das elektrodynamische Mikrophon auch als „Schnelle-Empfänger“ bezeichnet wird (wobei allerdings nicht die 158 Elektroakustik vektorielle Komponente der Schnelle berücksichtigt wird). Die Verluste an den Ohm’schen und den induktiven Innenwiderstand der Tauchspule sind in VII.2 als additive Konstante berücksichtigt. Ein anderes Konzept liegt dagegen dem Kondensator-Mikrophon zugrunde, bei dem zwischen der elektrisch leitenden Membran und einer dahinter im Abstand d liegenden Kondensatorplatte eine Gleichspannung U angelegt wird, mit der der resultierende Kondensator (Kapazität C) aufgeladen wird (Ladung Q). Bei Druckschwankungen ändert sich nun der Abstand zwischen der Membran und der dahinterliegenden KondensatorPlatte, so daß sich die Kondensatorladung verändert und eine Spannungsschwankung resultiert, die die Änderung der Membran-Auslenkung reflektiert. Wenn wir die Kondensator-Ladung in einen Gleich- und einen Wechselanteil aufspalten, also: Q = Q− + q ~ (VII.3) mit C− = Q− U− (VII.4) q ~ = ∫ I dt (VII.5) erhalten wir für die Wechselspannungs-Komponente U ~ am Ausgang des Kondensator-Mikrophons: U = U− − ~ (Q − + q ~ ) = U C - - (Q- + q ~ ) ⋅ 1 ξ 1- C- d (VII.6) wegen C~ 1 d-ξ ξ 1 1 = 1 − C C− d (VII.7) (VII.8) 159 Elektroakustik Dabei bezeichnet ξ die Auslenkung der Membran. Unter der erneuten Annahme einer sinusförmigen Schalldruckänderung an der Membran erhalten wir als Ausgangsspannung bei der Kreisfrequenz ω: ξ 1 − I dt d C− ∫ (VII.9) U− 1 ⋅ξ − ⋅I d i ⋅ ω ⋅ C− (VII.10) U ~ = U- U a (ω ) = komplexer Innenwiders tan d Die Ausgangsspannung ist damit proportional zur Auslenkung ξ, so daß man auch von einem „Auslenkungsempfänger“ (im Gegensatz zum oben beschriebenen Schnelleempfänger) spricht. Im Gegensatz zu den induktiven Innenwiderstandsverlusten des elektrodynamischen Mikrophons treten hier kapazitive Verluste am komplexen Innenwiderstand auf, die in VII.10 berücksichtigt wurden. Wenn man die Ausgangsspannung als Funktion der Membranschnelle berechnen will, so führt dies unter der Berücksichtigung, daß die Schnelle die zeitliche Ableitung der Auslenkung ist mit v = i⋅ω⋅ξ: U a (ω ) = U− 1 ⋅v− ⋅I i⋅ω ⋅d i ⋅ ω ⋅ C− (VII.11) D. h. bei konstanter Schnelle sinkt die Ausgangsspannung mit wachsendem ω ab, so daß das Kondensator-Mikrophon eine mit ω1 abfallende Schnelleempfindlichkeit aufweist. Wenn anstelle eines Luftspaltes zwischen der Membran und der dahinterliegenden Kondensatorplatte ein Elektret eingebracht wird (d. h. ein mit einer permanenten elektrischen Polarisierung versehener Stoff, z. B. spezielle Kunststoff-Folie mit ausgerichteten Elementar-Dipolmomenten) kann man auf das Anlegen einer statischen Vorspannung U verzichten und man erhält das sogenannte Elektret-Kondensator-Mikrophon. Es wurde von G. M. Sessler bei den Bell Laboratories in den 60er Jahren entwickelt. Aufgrund seiner geringen Abmessungen, einfacher Herstellungsweise und hohen Wiedergabetreue ist diese Art von Mikrophon das derzeit weitverbreitetste Mikrophon, das in jedem Kassettenrekorder oder Diktiergerät eingebaut ist. Ein anderes Wandlerprinzip wird beim piezoelektrischen Mikrophon ausgenutzt, bei dem zwischen der Membran und einer feststehenden Masse ein piezoelektrischer Kristall eingespannt ist, an dem bei Deformation (z. 160 Elektroakustik B. durch den von außen einwirkenden Schalldruck) eine Spannung ableitbar ist, die der auftretenden Kraft proportional ist. Als Ersatzschaltbild kann das Piezo-Mikrophon daher durch eine ideale Stromquelle ersetzt werden, deren Stromfluß der Schnelle proportional ist und einem parallel geschalteten Kondensator, der die kapazitiven Eigenschaften des PiezoKristalls beinhaltet: Abbildung 7.5: Schematischer Aufbau (links) und elektrisches Ersatzschaltbild (rechts) des piezoelektrischen Mikrophons Für die beiden auftretenden Teilströme I1 und I2 gilt damit: I1 = k ⋅ v (VII.12) I2 = C ⋅ U (VII.13) Als Ausgangsstrom ist daher der um den Kurzschluß-Strom I2 verminderte Strom I1 abgreifbar für den gilt: I = I1 − I 2 = k ⋅ v − i ⋅ ω ⋅ C ⋅ U a (VII.14) Das Piezo-Mikrophon ist damit ebenfalls ein Schnelleempfänger, wobei die Konstante k charakteristisch für das jeweilige Mikrophon ist. Neben den bereits eingeführten Unterschieden zwischen einem Auslenkungsempfänger (d. h. einem Mikrophon, bei dem das Verhältnis aus Ausgangsspannung und Membran-Auslenkung über die Frequenz annähernd konstant ist) und einen Schnelle-Empfänger (d. h. Verhältnis aus Ausgangsspannung und Schnelle der Membran ist annähernd konstant über der Frequenz) lassen sich die Mikrophone noch aufgrund ihrer räumlichen Empfindlichkeit als Schalldruckempfänger oder als Druckgradientenempfänger charakterisieren. Beim Schalldruckempfänger ist die 161 Elektroakustik auf die Membran ausgeübte Kraft F proportional zum Schalldruck p und zur Membranfläche s also: F = S⋅ p (VII.15) Beim Druckgradientenempfänger kann der Schall dagegen auch hinter die Membran gelangen (z. B. durch geeignet geformte Ausgleichskanäle), so daß die resultierende Kraft auf die Membran nicht gleich dem Schalldruck, sondern der Schalldruckänderung in einer vorgegebenen Richtung (xRichtung) ist: Fi = S ∂p ∆x ∂x (VII.16) Dabei bezeichnet ∆x den Abstand zwischen Vor- und Rückseite der Membran bzw. der Druckausgleichsöffnung hinter der Membran. Diese Anordnung ist sinnvoll, weil mit diesem Mikrophon nicht nur die skalare Größe des Schalldrucks, sondern die vektorielle Größe der Schallschnelle in ihrer Projektion auf die jeweilige x-Richtung bestimmt werden kann. Durch eine geeignete Kombination läßt sich damit auch die Schallintensität bzw. der Schallfluß am Mikrophonort bestimmen. Eine weitere Unterscheidung der Mikrophon-Typen in reversible Wandler und irreversible Wandler wurde bereits oben angesprochen: Während das Kontakt- und Kohlemikrophon nur eine Energiewandlung in eine Richtung ermöglichen und damit irreversibel sind, ermöglichen die übrigen vorgestellten Mikrophon-Arten die Erzeugung von Schall bei Anlegen einer elektrischen Spannung. Dieses wird beispielsweise für die Reziprozitäts-Eichung von Mikrophonen angewendet (vgl. Kapitel VII.4). Außerdem werden Kondensator-Mikrophone zuweilen als Lautsprecher für spezielle Anwendungen (z. B. hohe Frequenzen und kleine Intensitäten bei kleinen Abmessungen beispielsweise in der Neurophysiologie) eingesetzt. VII.2 Lautsprecher Beim Lautsprecher wird elektrische Leistung in mechanisch-akustische Leistung umgewandelt, wobei ähnliche Prinzipien wie bei den Mikrophonen auftreten. Beim elektrodynamischen Lautsprecher befindet sich eine Schwingspule im Ringförmigen Spalt eines Topfmagneten, die mit dem Lautsprecherkonus verbunden ist, in der sie wiederum federnd aufgehängt ist, um eine Schwingung durchführen zu können. 162 Elektroakustik Abbildung 7.6: Schematischer Aufbau des dynamischen Lautsprechers Die auf die Membran ausgeübte Kraft setzt sich zum einen aus der Kraft Fmech zusammen, die die mechanischen Elemente (Masse, Feder, Reibung und Schallabstrahlung) auf die Membran ausüben und zum andern aus der Lorenzkraft, die auf den stromdurchflossenen Leiter im Magnetfeld der Stärke B ausgeübt wird: F = Fmech + B ⋅ x ⋅ I (VII.17) Dabei bedeutet x die Länge der Leiterschleife im Magnetfeld, die vom Strom I durchflossen wird. Damit ist die anregende Kraft proportional zum anregenden Strom, so daß eine lineare Umsetzung erfolgen kann. Beim elektrostatischen Lautsprecher wird ähnlich wie beim elektrostatischen Mikrophon ein Kondensator gebildet, dessen Platten durch eine Wechselspannung unterschiedliche Kräfte aufeinander ausüben. Dabei ist eine Elektrode als massiver Metallkörper ausgeführt, während die andere Elektrode eine dünne Metallfläche darstellt, die auf einer elastischen Folie vor dem Metallkörper aufgedampft ist, um die schwingende Masse möglichst klein zu halten. Abbildung 7.7: Prinzipieller Aufbau des elektrostatischen Lautsprechers Die zwischen den beiden Elektroden wirkende Kraft Fel läßt sich aus der im Kondensator gespeicherten elektrischen Energie Wel errechnen zu: 163 Elektroakustik 1 Q2 ⋅ 2 C (VII.18) dWel Q2 = dξ 2 ⋅ C− ⋅ d (VII.19) Wel = Fel = − Dabei bezeichnet Q die auf dem Kondensator angesammelte Ladung, C die Kapazität des Kondensators, ξ die Auslenkung der Membran in Richtung auf den Metallkörper und d den Abstand der beiden Elektroden. Letztere Gleichung folgt aus der Voraussetzung, daß Wel proportional zu (d - ξ) ist, da die Kapazität umgekehrt proportional zu dieser Größe ist. Cbezeichnet dabei die Kapazität in der Ruhelage, d. h. für ξ = 0. Für die Ladung auf dem Kondensator gilt dann: Q = U− ⋅ C− + q ~ (VII.20) Damit folgt für den Wechsel-Anteil der zwischen den Kondensatorplatten auftretenden Kraft: F~ = 2 ⋅ U− ⋅ C− ⋅ q ~ U + ... ≈ − ⋅ C − ⋅ U ~ 2 ⋅ C− ⋅ d d (VII.21) Dabei wurde vorausgesetzt, daß die quadratischen Terme in q~ vernachq lässigbar klein sind und daß der Wechselspannungsanteil U ~ = ~ ist. C− Damit berechnet sich die auf die Membran des elektrostatischen Lautsprechers ausgeübte Kraft zu: F = Fmech + U− ⋅ C− ⋅ U d (VII.22) Dabei bezeichnet Fmech genau wie oben die von den mechanischen Elementen des Lautsprechers ausgeübten Kräfte auf die Membran. Im Vergleich zwischen Gleichung VII.17 und VII.22 stellt man fest, daß die Kraft im elektrodynamischen Lautsprecher proportional zum Strom und im elektrostatischen Lautsprecher proportional zur Spannung ist. Beide hier vorgestellten Lautsprechertypen sind reversibel, d. h. sie sind auch als Mikrophon verwendbar, da sich der Umwandlungsprozeß zwischen elek- 164 Elektroakustik trischer und mechanischer Energie aufgrund des gewählten Prinzips jeweils umkehren läßt. Dieses Prinzip der Reversiblität und der Möglichkeit, für eine vorgegebene mechanische Größe zwei unterschiedliche elektrische Größen als proportional anzusetzen, wird im folgenden Abschnitt näher beleuchtet. VII.3 Elektromechanische Analogien Sowohl die in VII.1 beschriebenen Mikrophone als auch die in VII.2 beschriebenen Lautsprecher sind Beispiele für elektromechanische Systeme, die man als eine Hintereinanderkopplung von linearen Vierpolen auffassen kann, d. h. Bauelementen mit zwei Eingängen und zwei Ausgängen, deren an den Ein- bzw. Ausgängen liegende Größen über lineare Gleichungssysteme miteinander gekoppelt sind. Der Prototyp eines derartigen elektromechanischen Systems sieht folgendermaßen aus: Abbildung 7.8: Elektromechanisches System als Verkettung von Vierpolen Dabei wird die elektrische Seite anhand ihrer elektrischen Kenngrößen v und I in die am „idealen Wandler“ (d. h. mit „Kopplung“ bezeichnetes Element) angelegt. Im Ausgang dieses Wandlers resultiert die Kraft F und die Schnelle v, die in einem sich anschließenden mechanischen Vierpol in die entsprechenden mechanischen Ausgangsgrößen umgewandelt werden. Für den eigentlichen idealisierten elektromechanischen Wandler gelten dann die folgenden Vierpolgleichungen, die in Matrix-Schreibweise geschrieben werden können: U = K11 F + K 12 v , I = K 21 F + K 22 v U K 11 K12 F = I K 21 K 22 v (VII.23) Unter der Annahme eines reversiblen Wandlers (d. h. prinzipielle Betriebsrichtung von mechanisch nach elektrisch oder umgekehrt von elektrisch nach mechanisch) darf bei der Umwandlung keinerlei Energie verlorengehen, so daß die elektrische Eingangsleistung U ⋅ I gleich der mechanischen Ausgangsleistung F ⋅ v sein muß: U⋅I = F⋅ v (VII.24) 165 Elektroakustik Als Konsequenz daraus folgt, daß in der Koppelgleichung (VII.23) entweder K12 = K21 = 0 oder K11 = K22 = 0 (VII.25) sein muß. Je nach Wahl, welche dieser beiden Alternativen gelten soll, gibt es also zwei mögliche elektromechanische Analogien, die im folgenden vorgestellt werden sollen: Bei der ersten elektromechanischen Analogie („FU“-Analogie) ist die Kraft proportional der Spannung und für die Kopplungsfaktoren K11 bzw. K22, die als einzige ungleich Null sind, gelten: K11 = 1 =α K 22 α U = I 0 0 1 α F v (VII.26) (VII.27) Für die elektrische Impedanz Zel ergibt sich dann folgende Umrechung in die mechanische Impedanz Zmech: Z el = U α⋅F = = α 2 ⋅ Z mech 1 I ⋅v α (VII.28) Ausgehend von dieser Analogie zwischen Kraft und Spannung bzw. Strom und Schnelle transformieren sich die entsprechenden Differentialgleichungen für den elektrischen Fall in entsprechende Differentialgleichungen für den mechanischen Fall wie folgt: U⋅C = I Kapazität F = S ⋅ v ( F = S ⋅ x) Federsteife ↔ (VII.29) 166 Elektroakustik U = + LI Induktivität U = R⋅I Widerstand ↔ F = M⋅v Masse (VII.30) ↔ F = W⋅v Reibung (VII.31) Abbildung 7.9: Umsetzung einer elektrischen Parallelschaltung in eine mechanische Reihenschaltung bei der FU-Analogie Die erste elektrische Analogie ist zwar sehr einleuchtend, weil die elektrische Spannung ja auch als Kraft x mal Weg pro Ladung aufgefaßt werden kann und daher allein von den physikalischen Dimensionen einer mechanischen Kraft sehr nahe kommt. Diese elektromechanische Analogie hat jedoch den Nachteil für die anschauliche Umsetzung, daß eine Parallelschaltung von mechanischen Elementen in eine Reihenschaltung elektrischer Elemente umgewandelt wird und umgekehrt, so daß die direkte Übertragung von mechanischen Schaltkreisen in elektrische Schaltkreise u. U. etwas erschwert wird. Weniger Schwierigkeiten in dieser Hinsicht macht die zweite elektromechanische Analogie („FI“-Analogie), bei der die Terme K12 bzw. K21 ungleich Null sind: K12 = 1 =α K 21 (VII.32) Als Koppelgleichung bzw. als Impedanz-Transformation ergibt sich: U 10 α F = 0 ⋅ I α v (VII.33) 167 Elektroakustik Z el = α2 U α⋅v = = 1 I ⋅ F Z mech α (VII.34) Genau wie oben kann man sich nun die elektromechanischen Analogien für diese zweite Analogie ansehen. Dabei stellt man fest, daß sich die Rolle der Bauelemente genau verschoben hat, so daß eine Kapazität nicht länger der Federsteife, sondern der Masse entspricht und eine Parallelschaltung von mechanischen Elementen in eine Parallelschaltung von elektrischen Elementen überführt wird (ähnliches gilt für die Reihenschaltung). Diese zweite elektromechanische Analogie hat zwar den Nachteil, daß die Proportionalität zwischen Kraft und Strom nicht direkt aus der Physik heraus motiviert wird, dafür fällt aber die Übertragung von mechanischen in elektrische Schaltkreise einfacher. Eine Gegenüberstellung der verschiedenen Analogien ergibt sich in folgender Tabelle: U I L R 1/C 2 LI /2 2 CU /2 FU-Analogie F v m W S 2 F /(2S) 2 2 mv /2 2 Dualität FI-Analogie I U C 1/R 1/L CU /2 LI /2 Die Beziehung zwischen den beiden verschiedenen Schaltungen, die aufgrund der unterschiedlichen Analogien aus derselben mechanischen Schaltung resultieren, wird als „Dualität“ bezeichnet. Beim Übergang von einer Schaltung zu einer dualen Schaltung gehen Widerstände in Leitwerte, Impedanzen in reziproke Impedanzen und Parallelschaltungen in Reihenschaltungen über u. s. w.. Prinzipiell ist mit beiden Schaltungen jedoch dasselbe Verhalten nachweisbar. Als Beispiel für einen aufgrund der elektromechanischen Analogien zu berechnenden elektrodynamischen Wandler soll der dynamische Lautsprecher behandelt werden: Abbildung 7.10: Vierpol-Darstellung des dynamischen Lautsprechers 168 Elektroakustik Der elektrische Eingangs-Vierpol besteht aus der Spule Ls, d. h. der Induktivität der Lautsprecher-Schwingspule, und dem Ohm’schen Verlustwiderstand Rs, die in Reihe mit dem idealen Wandler geschaltet sind, der eine Wandlerkonstante α haben soll. Als Ausgangsgröße dieses Wandlers steht die Schnelle v und die Kraft F zur Verfügung, die aus den mechanischen Elementen (Masse, Feder und Reibung ) mit den entsprechenden Parametern (m, S und W) zusammengesetzt sind. Die Wahl der elektromechanischen Analogie steht im Prinzip frei, es bietet sich jedoch an, für die elektromechanische Analogie das zugrundeliegende physikalische Gesetz zu benutzen, das im Fall des dynamischen Lautsprechers gerade das Induktionsgesetz bzw. die Lorenzkraft darstellt, also: F = B⋅ x ⋅ I (VII.35) U = B⋅ x ⋅ v (VII.36) Es resultiert damit für die Wandlerkonstante α: α = B⋅ x , C = α2 α2 m , L = , R = α2 S W (VII.37) Durch diese Umwandlung können die mechanischen Größen W, S und m direkt in entsprechende elektrische Größen umgesetzt werden, so daß folgendes Ersatzschaltbild resultiert, bei dem noch die Ankopplung an das Schallfeld auf der rechten Seite des Ersatzschaltbildes zu klären ist: Abbildung 7.11: Elektrisches Ersatzschaltbild des dynamischen Lautsprechers (ohne Ankopplung an das Schallfeld) Für die am Ausgang dieses elektromechanischen Systems (ohne Ankopplung an das Schallfeld) anliegende Kraft und Schnelle ergibt sich dann die folgende Koppelgleichung, die durch Hintereinanderausführung der Matritzenmultiplikation erzeugt werden kann, die jeweils einen Vierpol kennzeichnet: 169 Elektroakustik 1 R S + iω L S 1 U = ⋅ I iωC + 1 + 1 1 0 R iω L R + iω L S 1 S = α 1 0 0 ⋅ 1 1 α α F ⋅ v 0 1 1 α + ( R S + iωL S ) iωC + + R iω L F ⋅ 1 1 v iω C + + R iωL (VII.38) 2 Für den Betrieb des Lautsprechers lassen sich nun drei verschiedene Fälle unterscheiden: Fall a) Festgebremste Membran (z. B. durch Beschweren der Lautsprecher-Membran mit einer sehr großen Masse): Hierfür gilt v = 0, Zmech = ∞, so daß ein äquivalenter Abschlußwiderstand von 0 (Kurzschluß) resultiert, der den Parallel-Schwingkreis aus Widerstand, Kondensator und Spule kurzschließt. Mit dieser Anordnung läßt sich daher der Spulenwiderstand Rs und die Induktivität Ls für einen gegebenen Lautsprecher bestimmen. Fall b) Lautsprecher im Vakuum: Dabei tritt eine mechanische Impedanz von 0 auf, da keine Kraft an das äußere Medium übertragen werden kann. Dies wird in eine elektrische Impedanz der Größe unendlich transferiert, d. h. ein offenes Ende des Parallel-Schwingkreis resultiert als Abschlußwiderstand. Mit dieser Anordnung lassen sich daher die elektrischen Größen C, L und R bestimmen, die u. a. die Resonanz-Frequenz des Lautsprechers festlegen. Fall c) Lautsprecher in einer Schallwand: In diesem Fall resultiert als meF chanische Impedanz : v i ⋅ k ⋅ a eff F = 2 ⋅S⋅ v 1 + i ⋅ k ⋅ a eff (VII.39) Dabei bezeichnet S die Membranfläche und aeff den Radius eines äquivalenten Kugelstrahlers, d. h. aus a eff = R Kolben 2 (VII.40) 170 Elektroakustik Diese Impedanz führt zu einem mechanischen Ersatzschaltbild, das aus einer Parallelschaltung zwischen den Reibungsverlusten (d. h. abgestrahlte Wirkleistung des Lautsprechers in das Schallfeld) und einer Masse resultiert (d. h. abgestrahlte Blindleistung des Lautsprechers in das Schallfeld, die zwischen dem Feld und dem Lautsprecher hin- und herpendelt, ohne Arbeit zu verrichten). Abbildung 7.12: Mechanisches Ersatzschaltbild der Abtrahlimpedanz des Lautsprechers Als elektrisches Ersatzschaltbild resultiert damit als Abschlußwiderstand eine Hintereinanderschaltung des Ohm’schen Widerstandes RL und der Kapazität CL, die die entsprechende Transformation der mechanischen Widerstände in die elektrischen Größen darstellen. Abbildung 7.13: Vollständiges Ersatzschaltbild des dynamischen Lautsprechers Anhand dieses Ersatzschaltbildes läßt sich die von einem Lautsprecher abgestrahlte Wirkleistung als Funktion der Frequenz angeben, d. h. diejenige mechanische Ausgangsleistung des Lautsprechers, die in das akustische Fernfeld umgesetzt wird und zu einer effektiven Schallabstrahlung führt. Diese Wirkleistung entspricht der Verlustleistung in dem Wirkwiderstand RL. Bei sehr niedrigen Frequenzen (unterhalb der ResonanzFrequenz fRes des Lautsprechers) nimmt die abgestrahlte Wirkleistung mit 4 zunehmender Frequenz mit ω zu, um zu einem Plateau oberhalb der Resonanz-Frequenz bis zu einer Kolbenstrahler-Grenzfrequenz fg zu gelan2 gen, oberhalb der die abgestrahlte Wirkleistung mit 1 / ω abfällt. Die Resonanz-Frequenz berechnet sich dabei zu: 171 Elektroakustik Abbildung 7.14: Wirkungsgrad des Lautsprechers in Abhängigkeit von der Frequenz S fRe s = 1 ⋅ 2π m (VII.41) Die Kolbenstrahler-Grenzfrequenz fg berechnet sich zu: fg = 1 c ⋅ 2π a eff (VII.42) Der nutzbare Bereich der Abstrahlcharakteristik des Lautsprechers liegt dabei oberhalb der Eigenresonanz-Frequenz und unterhalb der durch die äußeren Abmessungen des Lautsprechers gegebenen KolbenstrahlerGrenzfrequenz, oberhalb derer der Lautsprecher nicht mehr wie ein akustischer Monopol abstrahlt, sondern die Wellenlänge klein gegenüber der Lautsprecher-Abmessungen wird und vorwiegend Blindleistung abgestrahlt wird. Um den nutzbaren Frequenzbereich eines gegebenen Lautsprechers möglichst nach unten hin zu erweitern, sollte daher die Resonanz-Frequenz möglichst niedrig gelegt werden. Dies kann insbesondere durch eine sehr weiche Aufhängung (geringe Federsteifigkeit) erzielt werden, sowie ein großes Boxenvolumen, da die in der Box eingeschlossene Luftmasse als zusätzliche Federung wirkt. Dies ist der Grund dafür, wieso große Lautsprecherboxen eine tiefere Grenzfrequenz bei gleichem Lautsprechersystem aufweisen als kleine Lautsprecherboxen. VII.4 Kalibrieren elektroakustischer Wandler Sowohl für Lautsprecher als auch für Mikrophone ist es notwendig, die akustischen Größen in entsprechende elektrische Größen umzurechnen, da elektrische Größen mit einer wesentlich höheren Genauigkeit als akustische Größen bestimmt werden können. Unter der Annahme eines reversiblen akustischen Wandlers (den man sowohl als Schallsender als auch als Schallempfänger betreiben kann) können wir die SendeEmpfindlichkeit S und die Empfangs-Empfindlichkeit E wie folgt definieren: 172 Elektroakustik S= F I (VII.43) E= U v (VII.44) Dabei bezeichnet F die mechanische Kraft auf den schwingenden Teil des Senders (insbesondere beim elektrodynamischen System), I den dabei fließenden Strom, U die aufgenommene Spannung und v die für die Erzeugung dieser Spannung erforderliche Schwelle. Zur Bestimmung dieser Sende- bzw. Empfangs-Empfindlichkeit gibt es verschiedene Kalibrierungsmethoden. Die für praktische Anwendungen häufigste Kalibrierungsmethode benutzt eine geeichte Schallquelle, d. h. einen Schallsender, der in einem definierten Luftvolumen bei vorgegebenen Bedingungen (Raumtemperatur, Luftfeuchtigkeit) einen gewissen Schalldruck erzeugt. Durch das Umsetzen dieses Schalldrucks in eine bestimmte elektrische Spannung U kann die Empfangs-Empfindlichkeit bestimmt werden und daraus gegebenenfalls die Sende-Empfindlichkeit eines anderen Systems, was an dieselbe Stelle der geeichten Schallquelle angebracht werden kann. Eine andere Möglichkeit ist die optische Kalibrierung , bei der die mechanische Auslenkung direkt optisch betrachtet werden kann (z. B. unter dem Mikroskop bei stroboskopischer Beleuchtung). Diese Kalibrierung eignet sich vorwiegend für tiefe Frequenzen und Systeme mit relativ großer Auslenkung. Die präziseste Kalibrierung geschieht mit der sogenannten Reziprozitäts„eichung“, bei der ein reversibles elektroakustisches System und ein Hilfssender verwendet werden, die jeweils in einem definierten Aufbau mit einer vorgegebenen, bekannten Impedanz Z erfolgt: Abbildung 7.15: Anordnung bei der Reziprozitätseichung (1. Schritt, schematisch) Im ersten Schritt wird mit dem Hilfssender ein geeignetes Schallfeld erzeugt, was sowohl in dem zu eichenden System eine Spannung UI als auch in dem reversiblen Wandler eine Spannung U2 erzeugt. Unter Zugrundelegung der (noch nicht bekannten) Empfangs-Empfindlichkeiten E1 bzw. E2 bzw. der noch nicht bekannten Schnelle v, die für die beiden Sy- 173 Elektroakustik steme aufgrund des symmetrischen Aufbaus als gleich anzunehmen ist, gilt: E1 = UI , v E2 = U2 v (VII.45) Im zweiten Schritt wird der reversible Wandler als Lautsprecher betrieben, wobei wieder dieselbe Schnelle erzeugt wird (bzw. auf sie hochgerechnet wird) wie beim ersten Aufbau, so daß dieselbe Spannung U2 an dem zu kalibrierenden System auftritt: Abbildung 7.16: 2. Schritt der Reziprozitätseichung Während an dem zu kalibrierenden System wieder dieselbe EmpfangsEmpfindlichkeit E1 aufgrund der gemessenen Spannung UII und Schnelle v entsteht, bestimmt sich die Sende-Empfindlichkeit des reversiblen Wandlers zu: E1 = U II , v S2 = F , I F = Z12 ⋅ v (VII.46) Für die dabei auftretende Kraft F kann aber aufgrund der bekannten (bzw. theoretisch berechenbaren) Impedanz Z12 die Beziehung zur Schnelle v aufgestellt werden, und außerdem gilt für einen reversiblen Wandler, daß die Sende- gleich die Empfangs-Empfindlichkeit ist, also S2 = E2. Daraus folgt für die noch unbekannte Schnelle v: v = S2 ⋅ U ⋅I I = 2 = Z12 v ⋅ Z12 U2 ⋅ I Z12 (VII.47) Auf diese Weise werden die für die Eichung bzw. Kalibrierung notwendigen mechanischen (bzw. akustischen) Größen v und F nicht direkt durch relativ ungenaue mechanische Messungen bestimmt, sondern indirekt durch elektrische Messungen, die sich mit einer wesentlich höheren Präzision durchführen lassen. Auf diese Weise lassen sich Präzisionsmessungen in der Akustik und die notwendigen präzisen Eichungen der verwendeten Wandler durchführen, so daß diese Methode beispielsweise 174 Elektroakustik zum Kalibrieren von Meßmikrophonen verwendet wird. Sie beruht jedoch auf der Voraussetzung der Reziprozität des reversiblen Wandlers sowie der Voraussetzung, daß die Impedanz bzw. die Schallausbreitung in der gewählten Meßanordnung mit genügender Genauigkeit bekannt ist.