2 Schwingungen
Werbung

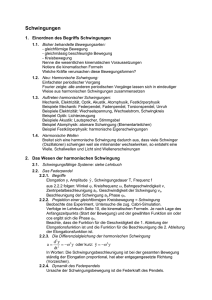
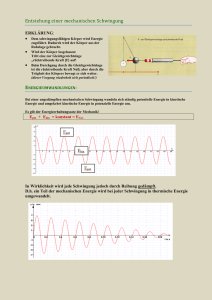
11 2 Schwingungen Unter Schwingungen (Oscillations) versteht man Vorgänge, bei denen sich eine physikalische Größe, z. B. Weg, Geschwindigkeit, etc., periodisch in Abhängigkeit der Zeit ändert. Eine Schwingung entsteht, wenn einem schwingungsfähigen System (einem so genannten Oszillator) Energie zugeführt wird. Das System wird aus seinem Gleichgewicht gebracht. Ihrem physikalischen Wesen nach können Schwingungen mechanischer aber auch elektromagnetischer Art (siehe Kapitel 10) sein. Mechanische Schwingung Elektromagnetische Schwingung Es müssen zwei Elemente zusammenwirken: eine Rückholkraft, die einen Körper in die Ruhelage zurückbringen will, und die Trägheit, die ihn über die Ruhelage hinaus bewegen lässt. Für ihre Entstehung sind so genannte Schwingkreise notwendig. In ihnen wird periodisch ein elektrisches und ein magnetisches Feld aufgebaut. Ein Oszillator (schwingendes System) ist einer der wichtigsten Begriffe der Physik. Beispiele dafür sind: Pendel, Elektronen in der Quantenmechanik, elektrische Schwingkreise in der Elektrodynamik, pulsierende Sterne. Oszillator = schwingungsfähiges System Oszillation = Schwingung 2.1 Die harmonische Schwingung (Simple harmonic motion) Die nun betrachteten Schwingungen können als frei schwingend bezeichnet werden. Sie schwingen nur unter dem Einfluss einer zurücktreibenden Kraft, sobald sie einmal von außen angeregt wurden. (Luftwiderstand oder Reibung werden als vernachlässigbar klein betrachtet.) Mit Hilfe der Kreisbewegung können wir die Bewegungsgesetze der harmonischen Schwingung kennen lernen. Tatsächlich bewegt sich der Schatten eines rotierenden Teiles wie ein schwingender Massenpunkt. Für die Kreisbewegung haben wir die Winkelgeschwindigkeit ω folgendermaßen definiert (siehe Band „Mechanik“, Kap. 2.8.1): ω = voller Winkel ᎏᎏᎏ Dauer einer Umdrehung = 2π ᎏᎏ Τ = 2π · ƒ Τ ... Umlaufzeit oder Periodendauer, [T] = s f ... Frequenz, [f] = Hz ω ... Winkelgeschwindigkeit, Kreisfrequenz, [ω] = s-1 Die Kreisfrequenz ω entspricht der Winkelgeschwindigkeit ω eines rotierenden Körpers, dessen Rotation auf einen Schirm projiziert wird und dort eine harmonische Schwingung mit der Frequenz f ergibt. In der Zeit t wird der Winkel ϕ = ωt überstrichen. Um die Bewegung eines Punktes auf einer Kreisbahn zu beschreiben, haben wir zusätzlich die Bahngeschwindigkeit v = r⋅ω und die Zentripetalbeschleunigung a = r⋅ω2 verwendet. Abb. 11.1 Wir projizieren eine Kreisbewegung seitlich auf einen Schirm und beobachten die Bewegung des Schattenbildes. 12 2 Schwingungen Wir untersuchen nun die Bewegung des Schattens, der die Projektion der Kreisbewegung auf den Schirm darstellt. Dabei geben wir seinen jeweilige Ort, seine Geschwindigkeit und seine Beschleunigung an. Abb. 12.1 Wir projizieren die Bewegung des kreisenden Punktes seitlich auf einen Schirm und erhalten eine periodisch wechselnde Auslenkung aus der Mittellage. Abb. 12.2 Für die Geschwindigkeit des auf- und ab schwingenden Schattens erhalten wir aus der Projektion eine periodisch schwankende Geschwindigkeit Abb. 12.3 Die Beschleunigung des Schattens ist der momentanen Auslenkung entgegengesetzt (beachte das negative Vorzeichen!) und schwankt ebenfalls periodisch. y(t) = r·sinω ·t y ... Auslenkung r ... Kreisradius ω ... Winkelgeschwindigkeit, Kreisfrequenz t ... Zeit Mittellage: y = 0 Umkehrpunkte y = r v(t) = r ⋅ ω ⋅cos ω ⋅ t v ... Geschwindigkeit r ... Kreisradius ω ... Winkelgeschwindigkeit, Kreisfrequenz t ... Zeit Mittellage: v = r⋅ω Umkehrpunkte v = 0 a(t) = –r·ω2⋅sin ω ·t a ... Beschleunigung r ... Kreisradius ω ... Winkelgeschwindigkeit, Kreisfrequenz t ... Zeit Mittellage: a = 0 Umkehrpunkte a = –r·ω2 Die harmonische Bewegung y(t)(1) = r·sinωt v(t) = rω⋅cosωt(2) a(t) = –rω2·sinωt(2) Lineares Kraftgesetz einer harmonischen Schwingung Die Kraft F, die auf einen harmonisch schwingenden Körper der Masse m wirkt, ist direkt proportional zu seiner Auslenkung y. Sie ist der Auslenkung entgegengesetzt. (1) y(t): gesprochen: y von t. Damit meint man, dass der Weg y (hier die Elongation) von der Zeit t abhängig ist. Man könnte kürzer auch schreiben: y = y0·sin ωt Häufig wird für die Abkürzung der Amplitude nicht y0, sondern r, und für die Elongation nicht y(t), sondern s gewählt: s = r·sin ωt (2) Zur Ableitung dieser Gleichungen ist die Differentialrechnung notwendig. Die Projektion der Kreisbewegung ergibt eine harmonische Bewegung. Schematisieren wir nun die Anordnung von Abb. 11.1, so erhalten wir Abb. 12.4: Abb. 12.4 Der Zeiger 苶O 苶P 苶苶 rotiert mit der Winkelgeschwindigkeit ω um O, daher bewegt sich sein Schatten auf einem Schirm zwischen B´ und P´ harmonisch auf und ab. Trägt man die Elongation des schwingenden Punktes P als Ordinate und die Zeit als Abszisse auf, so erhält man den zeitlichen Verlauf von P, sein y-t-Diagramm. Man erhält eine Sinuskurve. Das Weg-Zeit-Diagramm einer harmonischen Bewegung ist stets eine Sinuskurve. Bisher haben wir die harmonische Bewegung eines masselosen Schattens untersucht. Bei der harmonischen Bewegung eines Körpers muss eine veränderliche Kraft für die auftretende veränderliche Beschleunigung der Masse des Körpers sorgen: F(t) = m⋅a(t) = m⋅[–r⋅ω2⋅sinωt] = –m⋅ω2⋅[r⋅sinωt] Daraus folgt: F(t) = –m⋅ω2⋅s(t) Die wirkende Kraft ist proportional zu einem Weg oder Abstand: F ~ s. Das ist das Hooke´sche Gesetz. Damit haben wir gezeigt, dass die Bewegung tatsächlich harmonisch ist. 13 2.1 Die harmonische Schwingung Eine harmonische Bewegung mit dem Gesetz y = yo⋅sin ωt gilt nur unter der Annahme, dass die Bewegung des Massenpunktes tatsächlich in der Ruhelage beginnt und er sich zunächst nach oben bewegt. Andernfalls muss den Angaben entsprechend die Gleichung den Anfangsbedingungen angepasst oder eine Phasenverschiebung berücksichtigt werden (vgl. Beispiel 2.2). Beginnt also die Schwingung nicht zum Zeitpunkt t = 0 wie in der Abb. 12.4 gezeichneten Darstellung, so wird ein Phasenwinkel ϕ benötigt: y = yo⋅sin(ωt + ϕ) Wie aus der Mathematik bekannt, gibt es zwei Möglichkeiten, den Betrag eines Winkels anzugeben: das Gradmaß und das Bogenmaß. Grundsätzlich ist die Angabe des Phasenwinkels in beiden Arten möglich. In der Physik ist es jedoch üblich, den Phasenwinkel im Bogenmaß anzugeben. Abb. 13.1 Loslassen eines ausgelenkten Pendelkörpers – zu Beginn der Schwingung beträgt der Phasenwinkel im Gradmaß ϕ0 = 90° y = y0⋅sin (ωt + 90°) im Bogenmaß ϕ0 = π y = y0·sin (ωt + π) Abb. 13.2 Anstoßen eines Pendelkörpers in der Ruhelage – zu Beginn der Schwingung beträgt der Phasenwinkel im Gradmaß ϕ0 = 0° y = y0·sin (ωt) im Bogenmaß ϕ0 = 0 y = y0·sin (ωt) Merk & Würdig Ist das y-t-Diagramm eine Sinuskurve, so ist die Bewegung immer harmonisch. Es gilt das lineare Kraftgesetz. Da ϕ = ωt ist (Def. der Winkelgeschwindigkeit), gilt [ωt] = 1. Allgemein gilt, dass das Argument von Sinus bzw. Cosinus keine Einheit besitzen darf. Bei der Berechnung von sin ωt bzw. cos ωt ist der Taschenrechner in den „rad“-Modus zu bringen, da das Produkt ωt nicht in Grad angegeben wird. Vergleich Rotation – Schwingung Rotation Umlaufzeit Radius Winkelweg Winkelgeschwindigkeit T r = y0 ϕ ω Schwingung Schwingungs-, Periodendauer Amplitude Phase(nwinkel) Kreisfrequenz Abb. 13.3 Auslenkung und Anstoßen eines Pendelkörpers – zu Beginn der Schwingung beträgt der Phasenwinkel z. B. im Gradmaß ϕ0 = 60° y = y0·sin (ωt + 60°) im Bogenmaß ϕ0 = π/3 y = y0·sin (ωt + π/3) Schwingungsgleichung y = y0·sin(ωt + ϕ) y ... Elongation, [y] = m y0 … Amplitude, [y0] = m ω … Kreisfrequnez, [ω] = 1/s t … Zeit, [t] = s ϕ … Phase(nverschiebung), [ϕ] = 1 Frag & Würdig Wieso spricht man immer nur von einer Sinusschwingung und nie von einer Cosinusschwingung? Weil der Cosinus nur ein phasenverschobener Sinus ist: cos ϕ = sin (ϕ + π/2). Die Cosinuskurve liefert gegenüber der Sinuskurve also nichts Neues. Abb. 13.1 zeigt dies deutlich. 14 2 Schwingungen Beispiel 2.1 1 Ein Massepunkt schwingt nach dem Gesetz y = 1,3 cm⋅ sin (6 ᎏs ⋅t) cm. a) Wie groß ist die Frequenz f und die Periodendauer T? b) Wie groß ist die Amplitude? c) Wie groß ist die Elongation y, die Geschwindigkeit v(t) und die Beschleunigung a(t) 0,1 s nach Beginn der Bewegung? a) Aus der Angabe liest man ab, dass ω = 6 s-1 ist. Mit ω = 2πf und f = 1/T erhält man: f = 0,95 Hz; T = 1,04 s b) y0 = y(t) = 1,3 cm. c) Man setzt in die Gleichungen y = y0⋅sin ωt, v(t) = y0⋅ω⋅cos ωt und a(t) = – y0⋅ω2⋅sin ωt ein. s(t) = 1,3⋅sin(6⋅0,1) = 0,73 cm v(t) = 1,3⋅6⋅cos(6⋅0,1) = 6,4 cm/s a(t) = –1,3⋅62⋅sin(6⋅0,1) = – 26,4 cm/s2 Beispiel 2.2 Eine Masse m = 1 kg hängt an einer Feder mit der Federkonstanten k = 10 N/m. Die Masse wird 50 cm aus der Gleichgewichtslage ausgelenkt und dann los gelassen. Wie lautet die Gleichung, die die Bewegung des Körpers beschreibt? 冪莦 冪莦 k 10N/m -1 ᎏ Zunächst berechnen wir die Kreisfrequenz ω = ᎏmᎏ = ᎏ 1kg = 3,16 s Um weiter rechnen zu können, unterscheiden wir zwei Fälle: Wir wählen das Koordinatensystem so, dass (a) die Pendelmasse der unbelasteten Feder im Koordinatenursprung oder (b) die Pendelmasse der belasteten Feder im Koordinatenursprung liegt. (a) Unbelastete Feder (b) Belastete Feder Abb. 14.1 Die unbelastete Feder wird als Bezugsachse gewählt. Abb. 14.2 Die durch die Pendelmasse gedehnte Feder wird als Bezugsachse gewählt. ΔF Mit k = ᎏΔᎏs erhält man die Dehnung der Feder unDa die bereits belastete Feder in Ruhelage ist, ter dem Einfluss der befestigten Masse: 0,98 m braucht Δs nicht berücksichtigt zu werden. Kurzes Überlegen liefert sowohl die Gleichung als auch die zugehörige graphische Darstellung. Da über die Richtung der Auslenkung keine Angaben gemacht werden, kann sie sowohl nach oben (Abb. 14.3, Abb. 14.4 rote Kurve) als auch nach unten (Abb. 14.3, Abb. 14.4 grüne Kurve) erfolgen. Abb. 14.3 Abb. 14.4 Laut Angabe beträgt die Amplitude y0 = 0,5 m. 1 y = [– 0,98 + 0,5·cos(3,16 ᎏs t)] m bzw. Wir erhalten daher als Lösung: 1 y = [0,5·cos(3,16 ᎏs t)] m bzw. 1 y = [– 0,98 – 0,5·cos(3,16 ᎏs t)] m 1 y = [–0,5·cos(3,16 ᎏs t)] m 15 2.2 Die gedämpfte Schwingung Ergänzung & Ausblick • Eine praktische Anwendung des gerade Besprochenen ist die Sichtbarkeitstabelle der vier Jupitermonde. Um sie schnell zu finden und zu identifizieren, wird ihre Position relativ zum Jupiter für jeden Tag eines Monats als Sinuskurve aufgezeichnet. Abb. 15.3 Die Kreisbahnen der Monde des Jupiters werden als Sinuskurven dargestellt. • Der Energieerhaltungssatz gilt auch für Schwingungen. Während einer Periodendauer T eines Pendels wandelt sich die Abb. 15.4 potenzielle Energie in kinetische um und wieder zurück (Abb. 15.4). Die Summe aus potenzieller und kinetischer Energie ist die Schwingungsenergie: Ep + Ek = Eges Abb. 15.1 Die Umwandlung von potentieller in kinetische Energie bei einem mathematischen .... Übungen Übung 2.1 Die Auslenkung eines schwingenden Körpers als Funktion ist folgendermaßen gegeben: x(t) = 0,3·sin 5t m; (Zeiten in s, Längen in m). Wie groß sind die Amplitude sowie die Elongation, die Geschwindigkeit und die Beschleunigung des Körpers 2 s nach Beginn der Bewegung? Abb. 15.2 … und einem Federpendel. 2.2 Die gedämpfte Schwingung (Damped oscillation) Bisher haben wir den Idealfall betrachtet, dass bei Schwingungen jegliche Form von Hemmung vernachlässigt wurde. Tatsächlich gibt ein Pendelkörper während des Schwingens Energie ab, z. B. durch Reibung und bei Luftwiderstand. Ist die Anfangsenergie verbraucht, so kommt die Schwingung zum Erliegen. Die Amplitude wird immer kleiner bis sie null wird. Man spricht von einer gedämpften Schwingung. Wie stark die Amplitude abnimmt, hängt von der Dämpfung (damping) δ ab. δ nennt man auch Abklingkonstante oder Dämpfungsfaktor. (1) Die Schwingungsdauer der gedämpften Schwingung ist etwas größer als die Schwingungsdauer der ungedämpften Schwingung. Der Grund: Durch die Reibung verzögert sich der Zeitpunkt des Durchganges durch die Nulllage. Die momentane Geschwindigkeit des Pendels ist stets kleiner als die momentane Geschwindigkeit eines gleich weit ausgelenkten reibungsfrei schwingenden Pendels ωo2 – 苶, δ 2 mit (Abb. 16.1). Es gilt für die Frequenz der gedämpften Schwingung ωd = 兹苶 ωd… Frequenz mit Dämpfung, ω0 … Frequenz ohne Dämpfung, δ … Abklingkonstante [ωd] = [ω0] = [δ] = 1/s Schwingungsgleichung der gedämpften Schwingung y = y0e–δt sin ωt(1) y0 ... δ ... ω ... t… Amplitude; [y0] = m Abklingkonstante; [δ] = 1/s (Kreis)frequenz; [ω] = 1/s Zeit; [t] = s 16 2 Schwingungen Merk & Würdig Abb. 16.1 Das Weg-Zeit-Diagramm einer gedämpften Schwingung zeigt die Abnahme der Amplitude. Beachte, dass die Schwingungsdauer der gedämpften Schwingung etwas größer ist als die Periode der ungedämpften Schwingung Das Verhalten eines gedämpften Pendels hängt stark von der Abklingkonstanten δ ab. (siehe auch Fußnote (1), Seite 15): (a) ω0 > δ: der so genannte Schwingfall (underdamping condition), schwache Dämpfung. Das Pendel schwingt so lange, bis die Amplitude null ist. (b) ω0 = δ: aperiodischer Grenzfall (critical condition). Das Pendel schwingt einmal, dabei kehrt es langsam in seine Ruhelage zurück (Anwendung: Stoßdämpfer eines Autos). (c) ω0 < δ: Kriechfall (overdamping condition), starke Dämpfung. Das Pendel kehrt noch langsamer als im Fall (b) in seine Ruhelage zurück. (d) δ = 0: die ungedämpfte Schwingung (siehe Kapitel 2.1) 2.3 Erzwungene Schwingung – Resonanz (Forced oscillation - Resonance) Abb. 16.2 Vergleich gedämpfte – ungedämpfte Schwingungen δ = 3 (rot), δ = 25,13 (blau), δ = 50 (grün) Erreger = Oszillator Mitschwinger = Resonator (Man bezeichnet jedes schwingende Objekt als Oszillator.) Abb. 16.3 1.Fall: Ist die Oszillatorfrequenz viel kleiner als die Eigenfrequenz, so schwingt das Pendel im Gleichtakt (synchron) etwa mit der Amplitude des Oszillators (Δϕ ≈ 0). Bisher wurde das Verhalten von schwingungsfähigen Systemen nach einer einmaligen Anregung betrachtet. Die Dämpfung führt aber dazu, dass bei jeder Schwingung Energie an die Umgebung abgegeben wird. Will man trotz der Dämpfung eine ständige Schwingung aufrecht erhalten, so muss die verloren gegangene Schwingungsenergie laufend zugeführt werden. Dies kann etwa bei einem Federpendel dadurch geschehen, dass der Pendelkörper bei jeder Schwingung angestoßen wird. Wir hängen ein Federpendel an eine Schnur, die von einem Exzenter eines Elektromotors auf und ab bewegt werden kann (Abb. 16.3–16.5). Wir steigern allmählich die Drehzahl (= Frequenz des Anregers) und beobachten das Schwingungsverhalten des Pendels (die Resonanzfrequenz). Abb. 16.4 2.Fall: Ist die Oszillatorfrequenz gleich der Eigenfrequenz des Pendels, so schwingt das Pendel mit großer Amplitude (Resonanzfall; Δϕ ≈ π/2). Abb. 16.5 3.Fall: Ist die Oszillatorfrequenz größer als die Eigenfrequenz , so schwingt das Pendel nicht mit der Eigenfrequenz und nur mit geringer Amplitude (Δϕ ≈ π). Δϕ ist der Phasenunterschied zwischen der Oszillator- und der Resonanzfrequenz. 2.3 Die erzwungene Schwingung – Resonanz Das Pendel schwingt also in keinem der drei Fälle mit seiner Eigenfrequenz. Ihm wird gewissermaßen eine Frequenz „aufgezwungen“. Man spricht daher auch von einer erzwungenen Schwingung. Technisch ist vor allem der 2. Fall – die Resonanz – wichtig. Doch auch die Amplitude hängt von der Frequenz des anregenden Oszillators ab. Trägt man die Amplitude der Schwingung als Funktion der Oszillatorfrequenz in einem Diagramm ein, so erhält man die so genannte Resonanzkurve (Abb. 17.1). Aus ihr kann abgelesen werden, wie groß die Amplitude des schwingenden Federpendels bei verschiedenen Oszillatorfrequenzen ist. Die Form der Resonanzkurve hängt von der Dämpfung des Federpendels ab. Bei großer Dämpfung sind die Amplituden gering - die Resonanzkurve zeigt einen breiten Verlauf. Die Resonanzkurve ist umso schmäler und zeigt umso größere Amplituden, je geringer die Dämpfung des Schwingers ist. Bei geringer Dämpfung kann das Pendel im Resonanzfall zerstört werden („Resonanzkatastrophe“). Merk & Würdig Die Resonanz ist ein Sonderfall der erzwungenen Schwingung. Wird ein schwingungsfähiges System von außen permanent angeregt, ohne dass es auf den Erreger zurückwirken kann, so spricht man von einer erzwungenen Schwingung. Es gilt: f << f0: Der Resonator macht die Bewegung des Oszillators mit. f ≈ f0: Amplitude des Resonator nimmt (bis zur Resonanzkatastrophe) zu. f = f0: Eigenschwingung und erzwungenen Schwingung sind in Resonanz. f >> f0: Der Oszillator führt eine Schwingung mit sehr kleiner Amplitude aus. 17 Abb. 17.1 Die erzwungenen Schwingung verläuft stets phasenverschoben zur anregenden Schwingung; d. h., ihre maximale Auslenkung erfolgt später als die maximale Auslenkung des Anregers. 2.4 Von Resonanzen (About Resonances) Grundsätzlich besitzen alle (schwingungsfähigen) Körper eine Eigenfrequenz f0. Ihr Betrag kann je nach Material und Form natürlich verschiedene Werte annehmen und damit erwünschte und unerwünschte Resonanzen auslösen. Es ergeben sich daher Phänomene, in denen Resonanzen in technischen Anwendungen eine große Rolle spielen. Man erzeugt oder vermeidet gezielt Resonanzfrequenzen. „Gute“ und „schlechte“ Resonanzen sind die Folge. (1) Das Schwingungsverhalten von Stoßdämpfern Die Stoßdämpfer bei Motorrädern und Autos ermöglichen eine gute Bodenhaftung der Reifen auf dem Straßenbelag nur dann, wenn sie die Schwingungen des Fahrzeugs möglichst gut dämpfen. Defekte Stoßdämpfer führen zu unpräzisem Lenkverhalten, zu längeren Bremsstrecken und der Reifen nützt sich schneller (einseitig) ab. (Stoßdämpfer müssten eigentlich Schwingungsdämpfer heißen, da sie Schwingungen und keine Stöße dämpfen.) Abb 17.2 Die beiden Abbildungen zeigen das Schwingungsverhalten zweier Stoßdämpfer bei variabler Anregungsfrequenz. Die Resonanzkurven werden aufgenommen, während das Fahrzeug erzwungenen Schwingungen steigender Frequenz ausgesetzt ist. 18 2 Schwingungen (2) Gebäudeschwingungen Gebäude werden von Erdbebenstößen und von Windstößen zu Schwingungen angeregt. Die Bewegung von hohen Schornsteinen oder Türmen wird durch ihre Bauweise so stark gedämpft, dass normalerweise zu erwartende Anregungen zu keinen nennenswerten Amplituden der Gebäude führen. Österreich wird laut ÖNORM B 4015 in vier Erdbebenzonen eingeteilt, und die dort zu erwartenden Kräfte auf Gebäude(fundamente) werden durch entsprechende Faktoren in den Berechnungen der Statik berücksichtigt. (3) Hängebrücken sind auf Grund ihrer Konstruktion in gewissen Grenzen frei beweglich. Bereits geringe Windstärken können derartige Brücken in Schwingungen versetzen. Trotzdem darf die „Beweglichkeit“ nicht soweit wie bei der Brücke über die Tacoma-Bucht (Bundesstaat Washington, USA, Abb. 18.1) gehen. Sie erhielt wegen ihres Verhaltens den Namen »Galloping Gertie«. Nach dem Einsturz wurde sie so aufgebaut, dass die Eigenfrequenz der Brückensegmente verändert wurde. Seit damals wird jede Brücke bzw. das Brückenmodell einem Windkanaltest unterzogen. Abb. 18.1 Zunächst führte die Brücke Transversalschwingungen (f ≈ 36 Hz) aus. Erst die Torsionsschwingungen (f ≈ 14 Hz) brachten die Brücke am 7.11.1940 zum Einsturz. Die Amplitude überstieg wegen Resonanz die Belastungsgrenze der Brücke. Experiment EXPERIMENT Ein einfaches Instrument zur Demonstration der Resonanz ist die Stimmgabel. Mit ihr können die wesentlichen Eigenschaften der Resonanz hörbar gemacht werden. Zwei Experimente zeigen das deutlich: Abb. 18.2 Deckt man die Öffnung Abb. 18.3 Der Ton der linken einer schwingenden Stimmgabel schwingenden Stimmgabel wird ab, so wird der Ton deutlich leiser. durch Resonanz auf die rechte Stimmgabel übertragen. Frag & Würdig Angeblich gibt es Sänger, die mit ihrer Stimme Weingläser zum Zerspringen bringen können. Stimmt das? Es ist kein Fall bekannt, dass die menschliche Stimme ein Glas zum Zerspringen gebracht hätte. Die Geschichte des Oskar Matzerath in Günther Grass´ Blechtrommel ist eine Erfindung des Autors. Mit einem Lautsprecher geht es hingegen. Er muss allerdings die 100fache akustische Leistung der menschlichen Stimme aufbringen. Es ist also eine Frage der Amplitude. Wollte man wirklich ein Glas zerstören, ist es einfacher, es fallen zu lassen. Der Aufwand ist nicht so groß. Abb. 18.4 19 2.4 Von Resonanzen Wie haben es Mönche und Ministranten geschafft, ohne technische Hilfsmittel oft tonnenschwere Glocken zum Schwingen zu bringen? Durch Resonanz (und auch durch Hebelwirkung). Zieht der Mönch zum geeigneten Zeitpunkt, so kann auch eine tonnenschwere Glocke (z. B. die Pummerin) zum Läuten gebracht werden. Man muss etwa alle 3 Sekunden ziehen. Bei großen Glocken wird meist nicht die gesamte Glocke, sondern nur der Klöppel bewegt. In diesem Zusammenhang wird immer von einer Glockenweihe erzählt, bei der zum Entsetzen der Anwesenden die Glocke keinen Ton von sich gab. Die Frequenzen von Glocke und Klöppel waren identisch. Eine Verlängerung des Klöppels hat das Problem gelöst. Stimmt es, dass Soldaten nicht im Gleichschritt über Brücken marschieren dürfen, damit die Brücke nicht einstürzt? Es ist kein dokumentierter Fall bekannt, dass eine Brücke deswegen eingestürzt ist. Trotzdem marschieren Soldaten „normal“ über eine Brücke. In der Straßenverkehrsordnung StVO in der derzeit gültigen Form heißt es allerdings noch in §77, Abs. 1 Geschlossene Züge von Fußgängern: „Geschlossene Züge von Fußgängern dürfen über Brücken und Stege nicht im Gleichschritt marschieren.“ Josua soll die Mauern von Jericho durch Posaunenklang zum Einsturz gebracht haben. Kann man das glauben? Bei Ausgrabungen in dieser, einer der ältesten Städte der Welt, hat man nur Mauern aus Lehmziegeln gefunden. Mit Widderhörnern erreicht man niemals die erforderlichen Frequenzen und Energien für den Einsturz. Die Wirkung der „Musik“ der Hörner auf die Bewohner von Jericho war sicher größer als auf die Mauern der Stadt. Abb. 19.1 Altes Testament Josua, 6, 15 – 20: „Am siebten Tag aber brachen sie beim Anbruch des Morgenröte auf und zogen, wie gewohnt um die Stadt ... Darauf erhob das Volk das Kriegsgeschrei, und die Widderhörner wurden geblasen ... Die Stadtmauer stürzte in sich zusammen, und das Volk stieg in die Stadt hinein ...“ Beispiele 2.3 Man betrachte einen PKW als Federpendel mit m = 1000 kg und k = 108 N/m. Bei welcher Fahrgeschwindigkeit tritt auf dem skizzierten Kopfsteinpflaster (d = 20 cm) Resonanz auf? Periodendauer T der PKW-Federung: 冪莦 冪莦莦 m 1000 kg ᎏ T = 2π ᎏkᎏ = 2π ᎏ 108 N/m = 0,02 s Dies ist auch genau die Zeit, die der PKW braucht, um die Strecke d zurückzulegen. Bewegt sich der PKW gleichförmig, so d 0,2 m ᎏ erhalten wir für die Geschwindigkeit v = ᎏTᎏ = ᎏ 0,02 s = 10 m/s Der PKW sollte sich nicht allzu lange mit 36 km/h bewegen. Warum? (Antwort siehe Lösungsteil S. 142) Abb. 19.2 Übungen Übung 2.2 Ein Federpendel ist an einem Elektromotor – siehe Abb. 19.3 – angeschlossen. Bei welcher Winkelgeschwindigkeit des Elektromotors kommt es zur Resonanz des Federpendels (k = 1,7 N/m), wenn die Pendelmasse m = 15 dag beträgt? Übung 2.3 Ein einachsiger Anhänger (m = 250 kg) kann mit maximal 750 kg beladen werden. Seine Federung wird bei voller Beladung um 7 cm zusammengedrückt. Mit welcher Geschwindigkeit sollte der Fahrer nicht fahren, damit es nicht wegen regelmäßiger Fahrbahnunebenheiten (Dehnfugen auf der Autobahn, d = 10 m) zu unliebsamen Schwingungen des Anhängers kommt ? Abb. 19.3 20 Prinzip der ungestörten Überlagerung von harmonischen Wellen (superposition principle) Überlagern sich zwei oder mehrere Wellen, so ergibt sich die Auslenkung der resultierenden Welle durch Addition der Auslenkungen der einzelnen Wellen. Abb. 20.1 2 Schwingungen 2.5 Interferenz (Wave interference) Es kommt oft vor, dass ein schwingender Massenpunkt nicht nur eine Schwingung, sondern zwei Schwingungen gleichzeitig ausführt (Vergleiche dazu die Analogie der zusammengesetzten Bewegungen im Band „Mechanik”, Kapitel 2.6). Dieser Vorgang ist unter Interferenz bekannt. Darunter versteht man das Überlagern zweier oder mehrerer Schwingungen nach dem Prinzip der ungestörten Überlagerung. Es handelt sich dabei um die Bildung einer „Summe zweier oder mehrerer Schwingungen“. Diese Interferenz (= Summe) kann sowohl graphisch als auch rechnerisch gebildet werden. In diesem Kapitel beschränken wir uns auf die beiden harmonischen Schwingungen y1 und y2. Man kann zwei wichtige Hauptfälle unterscheiden: (1) Die Schwingungsrichtungen der Teilchen sind parallel. (2) Die Schwingungsrichtungen der Teilchen stehen normal aufeinander. Die Gleichungen der beiden Schwingungen seien y1 = r1·sinω1t ... (1) y2= r2·sin(ω2t + Δϕ) Grundsätzlich ist zu bemerken, dass der Begriff der Interferenz über die Schwingungen hinaus seine Bedeutung vor allem bei der Überlagerung von Wellen besitzt. Es werden daher im Kapitel 3.5 weitere Überlegungen zu diesem Thema angeführt. 2.5.1 Gleiche Schwingungsrichtung Wir bilden die Summe : y = y1 + y2 = r1·sin ω1t + r2.sin(ω2t + Δϕ) = r·sin(ωt + ε) Dabei ist : r … „neue“ Amplitude ω ... „neue“ Frequenz ε … „neue“ Phasenverschiebung Graphisch lässt sich dieser Sachverhalt mit einem Zeigerdiagramm darstellen (siehe Abb. 20.3). Abb. 20.2 Die Phase der resultierenden Schwingung entspricht im Allgemeinen nicht den Phasen der Teilschwingungen. Abb. 20.3 a Abb. 20.3 b Aus dem Zeigerdiagramm (a) kann man die neue Amplitude und die neue Phasenverschiebung sofort ablesen. Das y-t-Diagramm (b) zeigt die Summe der beiden Schwingungen y1 und y2. Auch hier sieht man die Bedeutung der Phase(nverschiebung). (1) Statt y01 und y02 wird aus Gründen der besseren Lesbarkeit r1 und r2 geschrieben. 21 2.5 Interferenz a) ω1 = ω2 Werden zwei harmonische Schwingungen mit gleicher Frequenz überlagert, so entsteht wieder eine harmonische Schwingung der gleichen Frequenz. Das y-t-Diagramm ist wieder eine Sinuskurve. Wendet man die Gesetze der Mathematik an, so erhält man mit obigen Angaben mit der Bedingung, dass ω1 = ω2, für r und ε folgende Gleichungen: 2 2 r = 兹r苶 ϕ 1 + r苶 2 + 2r苶sΔ 1r2 · co苶 r ·sin Δϕ 2 ᎏ tan ε = ᎏ r + r ·cosΔϕ 1 2 Bei geeigneter Wahl des Winkels Δϕ treten folgende wichtige Sonderfälle auf: Konstruktive Interferenz (constructive interference) Wenn gilt: Δϕ = 0 (keine Phasenverschiebung)(1) Die Amplituden können verschieden sein. ω 1 = ω2 dann ist: r = r1 + r2 und ε = 0 (Abb. 21.2) Abb. 21.1 Überlagerung von gleichphasigen Schwingungen Destruktive Interferenz (destructive interference) Wenn gilt: Δϕ = π Die Amplituden können verschieden sein. ω1 = ω 2 dann ist: r = r1 – r2 und ε = 0 (Abb. 21.2) Gilt zusätzlich r1 = r2, so wird r = 0 und ε = (nicht definiert). Wir erhalten keine Schwingung. Sie löschen sich gegenseitig aus (Abb. 21.4). Abb. 21.2 Überlagerung von gegenphasigen Schwingungen Abb. 21.3 Die Summe zweier Schwingungen kann auch „null“ sein. Da die Amplitude null ist, kann man eigentlich nicht von einer Schwingung sprechen. b) ω1 ≠ ω2 Werden zwei harmonische Schwingungen mit verschiedenen Frequenzen überlagert, so entsteht keine harmonische Schwingung. Die Bewegung ist jedoch periodisch, solange die beiden Frequenzen in einem rationalen Verhältnis zueinander stehen. Gilt ω1 ≠ ω2, so sind weiter reichende Berechnungen notwendig. Abb. 21.4 Diese Schwingung wurde aus 2 harmonischen Schwingungen zusammengesetzt, die verschiedene Frequenzen haben. Die zusammen gesetzte Schwingung ist nicht harmonisch; sie ist aber immer noch periodisch, wenn die Frequenzverhältnisse der Teilschwingungen rational sind. Im Beispiel verhalten sich die Frequenzen der beiden Teilschwingungen wie 2:3. (1) Δϕ ist der Winkel zwischen den Zeigern r1 und r2. Δϕ wird auch als Phasenverschiebung bezeichnet. 22 2 Schwingungen (a) (b) Ergänzung & Ausblick Fourier-Analyse FOURIER(1) konnte zeigen, dass jede periodische Schwingung f(x) sich in eindeutiger Weise als Summe von harmonischen Schwingungen darstellen lässt. Auf dieser Grundlage lassen sich sowohl Schwingungen herstellen (= synthetisieren) als auch untersuchen (= analysieren). Die mathematische Formulierung lautet: f(x) = a0 + a1·sin x + a2·sin 2x + a3·sin 3x + ... + + b1·cos x + b2cos 2x + b3·cos 3x + .... Die ai und bi sind die so genannten Fourier-Koeffizienten. Sie stellen die Amplitude der jeweiligen harmonischen Schwingungen dar. Je mehr Koeffizienten bestimmt werden, um so mehr nähert sich die Fourier-Reihe der gewünschten Funktion f(x) an. Ihre Bestimmung geht über den Rahmen dieses Lehrbuches hinaus(2). Liest man Abb. 22.1 von oben nach unten, so spricht man von Synthese. Aus harmonischen Schwingungen wurde eine neue Schwingung aufgebaut (synthetisiert). Andererseits kann man sagen, dass man die in (b) dargestellte Schwingung in die harmonischen (a) zerlegen (analysieren) kann. Die Frequenzsynthese und -analyse haben in der Physik und (Nachrichten)technik große Bedeutung. (c) Abb. 22.1 In (a) wurden folgende harmonische Schwingungen gezeichnet: y = 5·sin x (rot), y = 3,6·sin 2x (blau), y = 2,5·sin 3x (grün), y = 1,6·sin 4x (schwarz). Ihre Summe ist in (b) dargestellt. Ihre Periodizität als auch die sägezahnähnliche Form ist bereits erkennbar. In (c) ist die (unendliche) Summe aller Oberschwingungen gezeichnet. Die Idealform des Sägezahns ist erreicht. Die Summe der Oberschwingungen (siehe Kapitel 4.2) eines Musikinstruments ergeben seinen charakteristischen Klang. Man spricht in diesem Fall von der Klangfarbe eines Instruments. Kennt man das Frequenzspektrum, so lässt sich durch dessen Synthetisierung das Instrument nachahmen. Die elektronische Orgel ist dafür ein Beispiel. Leider ist es nicht möglich, alle Oberschwingungen zu bestimmen bzw. zu erzeugen. Dazu bräuchte der Synthesizer unendlich lange. Es handelt sich auch um eine unendliche Summe. Man muss einen Kompromiss zwischen Klangqualität und Rechenaufwand schließen. Dadurch klingen von Computern imitierte Instrumente oft hohl und unpersönlich. Ein derart kompliziertes Spektrum zu simulieren ist fast unmöglich. Ähnliches gilt für die menschliche Stimme. Da jede Person einen individuellen Resonanzkörper (= Brustkorb, Nasen-RachenRaum) besitzt, ist das Spektrum seiner Stimme daher so individuell wie sein Fingerabdruck. Sie ist daher zu seiner Identifikation geeignet (Stichwort: Kriminalistik; Erlaubnis, bestimmte Räume zu betreten). „Sprechende Computer“ klingen unpersönlich und „roboterhaft“. Das Ohr ist ein recht guter Analysator. Es unterzieht die empfangenen Töne einer Analyse und zerlegt sie wieder in ihre Bestandteile (= Oberschwingungen). Wir sind in der Lage diese Oberschwingungen zu hören und die Person an ihrer Stimme zu erkennen. (1) Abb. 22.2 JOSEPH FOURIER JEAN BAPTISTE JOSEPH FOURIER (1768–1830), franz. Mathematiker und Physiker. Während seiner Lehrtätigkeit an der École Polytechnique schloss er sich dem Feldzug Napoleons nach Ägypten an. Als Gouverneur von Unterägypten verfasste er ein Standardwerk über die Kultur Ägyptens. Nach seiner Rückkehr nach Frankreich beschäftigte er sich mit der mathematischen Behandlung von Naturerscheinungen. Bei seiner Theorie über Wärmeausbreitung entdeckte er die nach ihm benannte trigonometrische Reihe. (2) Mathematische Formelsammlungen enthalten bereits fertige Fourierreihen für (fast) jeden Typ an periodischen Schwingungen: Rechteck-, Dreieckschwingungen, gleichgerichtete Schwingungen, etc. 23 2.5 Interferenz • Lärm + Antilärm = Stille Da jedes Geräusch durch Fourier-Analyse in sein Frequenzspektrum zerlegt werden kann, braucht man „nur“ eine Gegenschwingung, den Antilärm, zu erzeugen. Die destruktive Interferenz lässt dann Stille entstehen. Vor allem periodischer Lärm lässt sich wegen seines vorhersehbaren Schallmusters „leicht“ eliminieren. Motorenlärm und Fluggeräusche lassen sich auf diese Weise beseitigen. Bislang allerdings nur im niederfrequenten Bereich. Einige Fluglinien bauen derartigen Spezialkopfhörer für die Piloten ein. Die notwendige Verständigung mit der Bodenstation wird dadurch verbessert. 2.5.2 Senkrechte Schwingungsrichtungen Ein Oszillator hat nunmehr zwei Freiheitsgrade; d. h. er kann sich in einer Ebene sowohl in die x- als auch in die y-Richtung frei bewegen. Diese Überlagerung ist unter der Bezeichnung Lissajous(1)-Figuren bekannt. Bei der mechanischen Entsprechung (Abb. 23.2) erkennt man deutlich das Wesentliche. Plotter (das sind Zeichenmaschinen) nutzen dieses Prinzip: sowohl das Zeichenpapier als auch der Tintenstift bewegen sich gleichzeitig. Ihre koordinierte Bewegung ergibt die Zeichnung. Die beiden Schwingungen werden zur Parameterdarstellung der Lissajous-Figuren: x = r1·sin ω1t y = r2·sin(ω2t + ϕ) Auch hier, wie in 2.5.1, erhält man mit der Bedingung ω1 = ω2 den einfachsten Fall. Die zugehörige Lissajous-Figur „pendelt“ zwischen Kreis und Strecke hin- und her (Abb. 23.3). Abb. 23.1 Schnelle Elektronik ist eine notwendige Voraussetzung für den Einsatz von aktiver Lärmkompensation. Sie helfen, gefährliche Frequenzen zu dämpfen. Eine normale Unterhaltung wird möglich. Abb. 23.2 Mechanische Entsprechung zu Erzeugung von Lissajous-Figuren. Ein mit Sand gefülltes Pendel bewegt sich periodisch über einer in x-Richtung schwingenden Platte. Abb. 23.3 Zwei harmonische, aufeinander senkrecht stehende Schwingungen mit gleicher Amplitude werden zur Interferenz gebracht. Sind die Frequenzen ω1 und ω2 verschieden, so ergeben sich etwas kompliziertere Formen (Abb. 23.5). (a) (b) Abb. 23.4 Aus einer Lissajous-Figur kann man das Frequenzverhältnis der beteiligten Schwingungen ablesen. Man bestimmt, wie oft die LissajousFigur das begrenzende Quadrat auf zwei Seiten berührt. So lässt sich ein Vielfaches einer Referenzfrequenz präzise einstellen bzw. bestimmen. (a) Frequenzverhältnis 1:1; (b) Frequenzverhältnis 4:5 (1) JULES ANTOINE LISSAJOUS (1822 – 1880), franz. Mathematiker. Sein Interesse galt vor allem den Wellen und Schwingungen und ihren Erscheinungsformen. U. a. beschäftigte er sich mit der Arbeit von Chladni und dessen Methode, Membrane zum Schwingen zu bringen (siehe 3.7). Helmholtz benützte Überlegungen von Lissajous, um schwingende Saiten zu studieren. Abb. 23.5 Verschiedene LissajousFiguren. Die senkrechten Spalten zeigen Figuren mit dem gleichen Frequenzverhältnis, die waagrechten Reihen mit gleicher Phasenverschiebung. Abb. 23.6 LISSAJOUS