EP 1 - Skript
Werbung

EP 1 - Skript
1 von 129
Seite drucken | Weiter >>
Fehler melden (Bitte keine Rechtschreibfehler!)
Bitte vor der Meldung des Fehlers die Readme lesen
Update-History
Wichtige Links
Übersicht Experimentalphysik 1:
I. Maßeinheiten
1. Längenmessung
2. Zeitstandard (Einheit und Zeitmessung)
3. Massenstandard und Messung (vorläufig)
II. Kinematik des Massenpunktes
1. Massenpunkte und Bahnkurve
2. Beschreibung einer Bewegung entlang einer Geraden
3. Ort-Zeitdagramm einer ungleichförmigen Bewegung
4. Definition: Momentangeschwindigkeit
5. Definition: Beschleunigung
6. Kinematik in 2 Dimensionen
7. Dia. und Demonstration
8. Definition der Beschleunigung für Bewegung in einer Ebene
9. Horizontaler Wurf
10. Gleichförmige Kreisbewegung
11. Gleichförmige Kreisbewegung 2
12. Kinematik in 3 Dimensionen
13. Mittlere Beschleunigung
14. Galilei-Transformation
III. Dynamik des Massepunktes
1. Die Newton'schen Axiome
2. Kraft und Masse
3. Newton'sche Bewegungsgleichung
4. Trägheitskräfte im beschleunigten Bezugssystem
5. Gleichförmig rotierende Bezugssysteme
IV. Erhaltunggrößen in der Mechanik
1. Kraft und Linearimpuls
2. Drehmoment und Drehimpuls
3. Arbeit, Leistung
4. Erhaltunggrößen in der Mechanik
5. Kinet. Energie und pot. Energie
6. Energieerhaltung
EP 1 - Skript
2 von 129
V. Massenpunktsysteme
1. Die Newton'sche Bewegungsgleichung
2. Erhaltungsgsätze
3. WW mit kurzer Reichweite; Stoßgesetze
VI. Starrer Körper
1. Starrer Körper als System von Massenpunkten
2. Statik des starren Körpers
3. Dynamik des st. Körpers, Rotation um feste Achsen
4. Rotation um freie Achsen, Kreisel
VII. Relativistische Mechanik
1. Relativitätsprinzip
2. Lorentz-Transformation
3. Relativistische Dynamik
VIII. Schwingungen und Wellen
IX.
1. Erinnerung: Mechanik fester Körper
2. Elastische Verformung
3. Abgleitete elastische verformungen
X. Mechanik ruhender Flüssigkeiten und Gase
XI. Mechanik strömender Flüssigkeiten und Gase
1. Strömung realer Flüssigkeiten durch Rohre
2. Zirkulationsströmung
3. Turbolente Strömungen
4. Dynamischer Auftrieb
Seite drucken | nach oben | Weiter >>
Datei: 1.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
EP 1 - Skript
3 von 129
I. Maßeinheiten
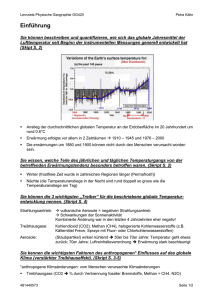
Typische Längen
Obere Grenze für die Ausdehung des
Elektrons und der Quarkteilchen
< 10 -16 cm
des Elektrons und der Quarkteilchen
< 10 -16 cm
Radius von Atomkernen
10 - 13 · 10-12 cm
Radius des H-Atoms
5 · 10 -9 cm
Sichtbares Licht λ
4 - 7 · 10 -7 m
Bacterium Coli
10-6 m
Durchmesser roter Blutkörperchen
7,5 · 10-6 m
Durchmesser einer Nervenfaser
1 - 20 · 10-6 m
.
.
.
Entfernte Radiogalaxie OH 471
1028 m
Kleinste Transistoren (11-99):
~ 0,25 · 10-6 m
(Im Labor):
0,08 · 10 -6 m = 80 nm
EP 1 - Skript
4 von 129
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: readme.txt
Datei: update.txt
Datei: Links.html
Seite drucken | Inhaltsverzeichnis >>
Java-Applets zur Physik
Principles of Pool and Billiards
Seite drucken | nach oben | Inhaltsverzeichnis >>
Datei: ../1
Datei: 2.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
I.1 Längenmessung
Standard [Längeneinheit]:
Pariser Urmeter: Abstand zweier Eichmarken auf einem Pt-Ir-Stab bei 0° C
-te Teil des polaren Erdumfangs (Meridian).
Genauer U= (1 + 0,0002) · 40 · 106 m
EP 1 - Skript
5 von 129
Kritik:
1m = 1.650.763,73 λvak (orang.rot - 86 Kr)
Kritik: Endliche Linienbreite
Stabilisierter Laser:
1m = Wegstrecke, die Licht im Vakuum in
zurücklegt '
Diese m-Definition basiert auf
der Definition der Sekunde
auf der Festlegung der Vakuumlichtgeschwindigkeit zu
Begründung: Die Vakuumlichtgeschwindigkeit ist nach Einstein eine fundamentale
Naturkonstante, die unveränderlich in allen Bezugssystemen gilt.
Längenmessung mit stabil. Laser:
Die so gemessene Laser - Wellenlänge wird als Maßstab benutzt, d.h. die zu
messende Länge L wird in Vielfachen dieser Wellenlänge ausgedrückt.
EP 1 - Skript
6 von 129
optische Interferometrie
Weitere gebräuchliche Längeneinheiten:
1 km = 103 m
1 LJ = 9,46 ⋅ 1015 m
1 cm = 10-2 m u.s.w.
1 Å = 10-10 m u.s.w
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 3.htm
Datei: 4.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
I.3 Massenstandard und Messung (vorläufig)
Massenstandard (Einheit) : kg
Def.: 1 kg = Masse des Pariser Pt-Ir Ur-kg
Wir verfügen och nicht über einen atomaren Massenstandard, z.B. m (neutrales
1
H-Atom oder neutr. 86Kr - Atom)
Grund: Wir können die Masse des Pariser Ir-Pt-Blocks nicht mit hinreichender
Genauigkeit in Einheiten eines solchen atomaren Standards messen. Daher → Vgl.
einer unbekannten Masse mit Pariser Ur-kg statt mit der Masse eines einzelnen
Atoms
Vergleich z.B. mit Balkenwaage
W ∼ ms
W ist im Unterschied zur Masse eine ortsabhängige Größe
Genauigkeit des Vergleichs:
Die Massen individueller Atome sind hingegen nur mit einer Genauigkeit von
bestimmbar.
EP 1 - Skript
7 von 129
Zusammenhang zwischen atomarer Masse und Avogadro'scher Zahl NA
Def.: Stoffmengeneinheit des mol:
1 mol (kmol ≡ Mol) irgendeines chem. Elements oder chem. Verbindung = diejenige
Stoffmenge, die exakt ebenso viele Atome bzw. Moleküle enthält wie 12g (12kg) von
reinem
12
C; A (12 C) = 12.000
1 mol 12C = 12 g 12C
1 mol 16O2 = 32 g 16O2
1 mol H2O = 18 g H2O
usw...
Wird z.B. durch Abzählung der Anzahl der Atome in einem Kristallgitter ermittelt (hier
EP 1 - Skript
8 von 129
eines 12 g 12C - Gitters)
Wegen der begrenzten Genauigkeit unserer Kenntnis von NA ist ein atomarer
Massenstandard weniger genau als der Standard des Ur-kg
Hingegen können Atommassen untereinander sehr viel genauer verglichen werden
als relativ zum Ur-kg
1 atomare Masseneinheit
Abkürzung: u 1 u = 1,66057 ⋅ 10 -27 kg
Stoffmenge in mol (Chemie):
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 4.1.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II Kinematik des Massenpunktes
II.1 Massenpunkte und Bahnkurve
Realer Körper:
- Ausdehung
- Masse
- deformierbar
"Starrer Körper":
- Deformierbarkeit vernachlässigt
--> Abstände zwischen Volumenelementen
"Massenpunkt":
- Ausdehnung vernachlässigt
--> natürlich nicht deformierbar
EP 1 - Skript
9 von 129
zeitlich konstant
In vielen Fällen lässt sich die Bewegung eines Körpers durch diejenige, des den
Körper repräsentierenden Massenpunkt (Schwerpunkt) beschreiben
Massenpunkte, starrer Körper sind Idealisierungen zur Vereinfachung der (math.)
Beschreibung
Beschreibung der Bewegung eines Massenpunktes durch die Bahnkurve
Bewegung eines Massenpunktes im Raum (x,y,z) und Zeit (t)
Bahnkurve
: Koordinaten (x,y,z) des MPzum Zeitpunkt t
EP 1 - Skript
10 von 129
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 5.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.2 Beschreibung einer Bewegung entlang einer
Geraden
= Eindeminsionale Bewegung:
Führe entlang der Geraden Skala (Koordinatensystem) ein u. Uhren
(synchronisiert!!)
Verteile Beobachter Längs der x-Achse (mit Uhren)
Jeder Beobachter stellt die Zeit fest, zu der der Läufer bei ihm vorbeikam
Voraussetzung: Die Bewegung sei gleichförmig d.h. es werden in gleichem
Zeitintervall gleiche Strecken zurückgelegt
Definition: mittlere Geschwindigkeit im Zeitintervall Δt bzw. längs der Wegstrecke
Δx:
Zahlenwert (Maßzahl) → von v: tg α
Wenn Einheiten gleich lang!!
Bei gleichförmiger Bewegung ist v:
unabhängig von der Zeit t
unabhängig vom Maßintervall Δ t, d.h. Zeitdauer der Mittelung
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 6.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.3 Ort-Zeitdiagramm einer ungleichförmigen
Bewegung
--> V ist nicht mehr zu allen Zeiten gleich, auch nicht mehr unabhängig von Δt !!!
EP 1 - Skript
11 von 129
= Steigung der Sekante
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 7.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.4 Def. Momentangeschwindigkeit (Geschw.) v
Zahlenwert von v = Steigung der Tangente
Einheit: [m/s] ; Dimension:
abgeleitete Größe
SI-System
Für ungleichförmige Bewegungen ist v=f(t)
Beispiel: Sei x = A • t 2 ; A = konst.
EP 1 - Skript
12 von 129
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 8.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.5 Def. Beschleungigung
Def. Beschleunigung: Änderungsgeschwindigkeit der Geschwindigkeit
Nimmt v linear mit t zu (oder x quadratisch mit t) so ist: a = konst.
Zahlenwert von a = Steigung der Sekante
Zahlenwert von a = Steigung der Tangente
EP 1 - Skript
13 von 129
Einheit im SI-System:
Dimension:
Ist v(t) = konst., so ist a = 0
v = v (t) bekannt ; s (t) = ?
Summation --> s - s0 = ∑i vi Δti
oder für
Δti → 0:
t=0
s=s0
Anfangsbedingung.
Ebenso:
Spezialfall: Gleichförmig beschleunigte Bewegung
--> a = konst. , d.h. v linear in t
z.B. freier Fall im Vakuum
EP 1 - Skript
14 von 129
Freier Fall im Vakuum aus der Ruhelage: t = 0 : s0 = 0 [m]; v0 = 0 [m/s]
a = konst = g
s - Achse pos. nach unten
: g ≈ 9.81 m/s 2
a = konst.
g identische für alle Körper, unabhängig von Größe, Gestalt, chem.
Zusammensetzung usw. (an definiertem Ort)
Extrem genau geprüft: Δg/g ≤ 10-12 !!
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 9.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.6 Kinematik in 2 Dimensionen
Approximierte Bahnelement zwischen < t2 , t3 >
EP 1 - Skript
15 von 129
durch Sehnenelement
und
sind Vektoren:
Die Zerlegung ist zweckmäßig, weil Horizontal und Vertikalbewegung voneinander
unabhängig verlaufen
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 10.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
EP 1 - Skript
16 von 129
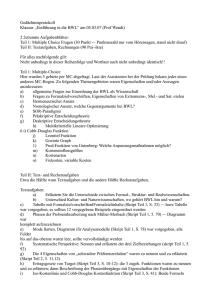
II.7 Dia. und Demonstration
2 Golfbälle
Stroboscopische Aufnahme 1/30 s:
Die horizontalen Bewegungen differieren - die vertikalen Bewegungen der
gleichzeitig losfliegenden Bälle sind identisch -->
Der horizontal abgeschossene Ball legt zwischen 2 Blitzen (1/30 s) stets die gleiche
horizontale Wegstrecke zurück --> vx = konst.
Der vertikale Fallweg ist für beide Bälle stets gleich --> gleichzeitiges Auftreffen
--> Horizontal- und Vertikalbewegung verlaufen unabhängig
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 11.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.8 Definition der Beschleunigung für Bewegung in
einer Ebene
wird sich im allgemeinen längs der Bahnkurve nach Betrag und Richtung
ändern
EP 1 - Skript
17 von 129
α = 0°/180° --> Lokal nur Betragsänderung der Geschwindigkeit
-->Bahnbeschleunigung
↑
Spezielfälle
↓
α = 90° -->
Ist das längs der Bahnkurve stets der Fall, s.o.
Spezialfall der gleichförmigen Kreisbewegung (s.o.)
= konst. längs Bahn
--> Radial oder Zentripetalbeschleunigung
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 12.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.9 Horizontaler Wurf
Bewegung ist zusammengesetzt aus:
horizontal: gleichförmige Bewegung sx
vertikal: gleichförmig beschleunigte Bewegung sy
Wähle
=0={0,0}
horizontaler Wurf: v0x ≠ 0 ; v0y = 0
horizontale gleichförmige Bewegung: ax (t) = 0
EP 1 - Skript
18 von 129
vertikale gleichförmige beschleunigte Bewegung: ay (t) = a0y
v 0x = 0
! 2 Würfe
v 0x ≠ 0
Die vertikale Bewegung ist in beiden Fällen identisch
(siehe stroboscopische Aufnahme)
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 13.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.10 Gleichförmige Kreisbewegung
Radiusvektor
überstreicht in Zeit Δ t den Winkel
Winkelgeschwindigkeit:
EP 1 - Skript
19 von 129
[t-1] Einheit s -1 oder Hz
korrekter:
wegen
T = Umlaufzeit
v = Unlaufsfrequenz =
s-1 od. Hz
ω = Winkelgeschwindigkeit oder "Kreisfrequenz"
Bei der gleichförmigen Kreisbewegung (d.h. v = konst.) ist ω = konst.
[Wenn sich die WInkelgeschwindigkeit zeitlich ändert (d.h. v ≠ konst), so erfährt der
Körper auf der Kreisbahn eine WInkelbeschleunigung
Beispiel: Pressluftbetriebene Turbinenbohrmaschine beim Zahnarzt
v = 4 · 10 5 min-1 -> : 60 -> v= 6667 Hz
Ø (Bohrkopf) = 1 mm -> r = 0.5 · 10-3 m
v = 6667 s-1 · 2 π · 10-3 m = 20.9 m/s = 75 km/h
Wir werden später sehen, dass ω und
auch Vektoren sind
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 14.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.11 Gleichförmige Kreisbewegung 2:
Zentripetal-, Radial- oder Normalbeschleunigung
EP 1 - Skript
20 von 129
d.h. gleichförmige Kreisbewegung
d.h. nur Richtungsänderung
Ähnliche Dreiecke
Im Grenzfall Δ t -> 0 steht
ist also Richtung M gerichtet --> Zentripetalbeschleunigung
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 15.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.12 Kinematik in 3 Dimensionen
Verallgemeinerung:
EP 1 - Skript
21 von 129
3 gleichzeitig ablaufende
1 - dimensionale Bewegungen
Betrag und Geschwindigkeit (Skalar)
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 16.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.13 Mittlere Beschleunigung
EP 1 - Skript
22 von 129
Momentanbeschleunigung:
ay, az analog
! a ≠ 0 wenn Betrag und/oder (!) Richtung von
! Richtung von
sich ändert
Richtung von
Beispiel
Pkw durchfährt 90° Kurve in 6 s mit konst.(!)
= 25 m/s
Wie groß ist die mittlere Beschleunigung während dieses Zeitintervalls?
Richtung = Richtung von
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 17.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
II.14. Galilei - Transformation
Betrachte zwei Bezugssysteme, S(x, y, z,) mit Ursprung 0, die sich relativ
zueinander bewegen. (gleichförmig)
EP 1 - Skript
Annahme: In beiden Systemen gelte das gleiche Zeitmaß
Weitere Annahmen:
- O = O' * ω * t = 0
- Relativbewegung enlang OO'
- x||x'; y||y'; z||z'
(II.5.1.):
Betrachte nun die Geschwindigkeiten nach den Beschleunigungen in den beiden
Systemen:
aus (II.5.2.) folgt somit:
23 von 129
EP 1 - Skript
=> Die Beschleunigung ist "invariant" gegenüber einer gleichförmigen Bewegung
des Bezugssystems!
Beispiel: Dopplereffekt
"Schall" sind Dichteschwingungen der Luft
mit diesen Eigenschaften:
Schallgeschwindigkeit
Wellenlänge λ
Frequenz ν
24 von 129
EP 1 - Skript
25 von 129
Bewegung von der Schallquelle weg:
>0
Bewegung zur Schallquelle hin:
<0
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 18.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
III Dynamik des Massepunktes
III.1 Die Newton'schen Axiome:
"Kinematik":
Quantitative Beschreibung eines gegebenen Bewegungsablaufs.
"Dynamik":
Quantitative Beschreibung des Zusammenhangs zwischen einer
Bewegungsänderung und ihrer Ursache.
Ursache der Bewegungsänderung:
EP 1 - Skript
26 von 129
"Wechselwirkung" des betrachteten Teilchens mit einem oder mehreren anderen
Teilchen.
Beispiele:
Elektrische Wechselwirkung
Magnetische Wechselwirkung
Gravitationswechselwirkung
"Wechselwirkungen" werden im Folgenden durch die physikalische Größe KRAFT
beschrieben. Die Stärke aller bekannten Wechselwirkungen (Messung siehe unten)
nimmt mit zunehmenden Abstand geringer zu und verschwindet für den Grenzfall r
→ ∞ . Wie der Abfall mit dem Abstand zusammenhängt, hängt im allgemeinen von
der betrachteten Wechselwirkung ab.
"Freies Teilchen": Idealfall des völlig wechselwirkungsfreien Teilchens
1) freies Teilchen k:
2) Summe aller Wechselwirkung mit Teilchen k hebt sich gerade auf.
Ergebnis der Wechselwirkung: Resultat der Bewegungsänderung:
Beschleunigung
, die Teilchen mit Masse m zu Teil wird.
(später: Linearimpuls!)
Newton'sche Gesetze:
Alle bekannten Erfahrungen der (klassischen) Machanik lassen sich auf drei
Grundgesetze zurückführen, die so erstmals von Sir Isaac Newton (1642 - 1727)
formuliert worden sind.
1. Newton'sches Gesetz: (Trägheitsprinzip)
"Die Bewegung eines Teilchens (Massenpunkt) verläuft so lange geradlinig
gleichförmig, solange keine Kraft auf es wirkt."
2. Newton'sches Gesetz: (Aktionsprinzip)
"Zwischen der durch die Wechselwirkung beschriebenen Kraft
und der Beschleunigung
, der Masse m
besteht die Beziehung:"
(II.1.1)
3. Newton'sches Gesetz: (Reaktionsprinzip)
"Bei der Wechselwirkung zwischen zwei Teilchen werden entgegengesetzt gleich
große Kräfte ausgeübt:"
EP 1 - Skript
27 von 129
(II.1.2)
Erläuterungen:
Trägheitsprinzip:
"Freies Teilchen" ist nur näherungsweise realisierbar.
Die Aussage
= const. setzt die Existenz eines Bezugssystems voraus. →
"Inertialsystem"
Aus den Erkenntnissen der Galilei - Transformation: "Ist S ein Inertialsystem, so sind
auch alle gegenüber S gleichförmig translatorisch bewegten Systeme S' wiederum
Inertialsysteme."
Dies gilt streng genommen nicht für beschleunigte Bezugssysteme (siehe später),
kann aber oft (z.B. Erdoberfläche) als gute Näherung benutzt werden.
Aktionsprinzip:
Nach Trägheitsprinzip wird als Ursache für eine Bewegungsänderung
(=Beschleunigung) die neue physikalische Größe KRAFT eingeführt
=>
muss vektorielle Größe sein.
Bedeutung von
=m·
also:
"Wirkt eine bestimmte Kraft auf zwei Teilchen unterschiedlicher Massen, so bleibt
das Produkt aus der jeweiligen Masse und er sich ergebenden Beschleunigung
erhalten."
Masse m kann also außer mit einer Waage ("schwere Masse") auch durch die unter
Einfluss einer Kraft entstehende Beschleunigung bestimmt werden ("träge Masse").
Krafteinheiten:
EP 1 - Skript
28 von 129
Einheit der Kraft:
1 N = 1 "Newton"
- Früher auch gebräuchlich: 1 dyn = 1g cm/s2 = 10-5 N
1 Dyn = 105dyn = 2 N
- technische Maßeinheit für die Kraft: "Kilopond"
"1 kp ist das Geweicht einer Masse von 1 kg"
1kp = 9.80665 kg · m /s2
Statsische Meßmethoden für Kräfte
"Hooke'sches Gesetz"
Dynamische und statische Wirkung von Kräften
- Definition der Kraft über Newton
=m·
- Beispiel der Feder: Kräfte
können auch statische Wirkungen haben ("Verformung" z.B.)
Reibungskräfte
EP 1 - Skript
29 von 129
- Haft und Gleitreibung:
In den allermeisten Fällen ist
durch das Gewicht (bzw. entsprechende
Normalkomponente) gegeben.
(a) Haftreibung Erst bei Überschreitung einer bestimmten äußeren Kraft fängt ein
Körper an, auf der Unterlage zu gleiten
--> ∃ maximale haftreibungskraft
FH,max = f G · FN
fH: Haftreibungskoeffizient
i.a. fH < 1 , kann aber auch fH > 1 sein !!
(b) Gleitreibung: Für die Gleitreibungskraft gilt im Bereich kleiner Geschwindigkeiten:
FG = f G · FN
fg Gleitreibungskoeffizient
Es gilt stets: fH ≥ fG
"Rheologie"
EP 1 - Skript
30 von 129
Einige Beispiele zur anwendung der Newton'schen Bewegungsgleichung:
a)
= 0 → geradlinig, gleichförmige Bewegung
=0→m*
=0→
=0→
=0→
= const.
= const. ≠ 0 → geradlinig, gleichförmig beschleunigte Bewegung
b)
= const. → m *
=
c)
=0
= const.
= const.
=-D*
→ "harmonische Schwingung"
Rücktreibende Kraft:
EP 1 - Skript
31 von 129
"Suche eine Funktion, deren 2. Ableitung bis auf Konstanten (D/m) gleich der
Funktion selbst ist."
Ansatz:
x(t) =
* sin(ωt)
(t) = ω *
(t) = -ω2 *
VERGLEICHE! ↓
Schwerependel
* cos(ωt)
* sin(ωt) = -ω2 * x(t)
EP 1 - Skript
32 von 129
Differentialgleichung (DGL):
-m * g * φ(t) = m * l *
|:m
EP 1 - Skript
33 von 129
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 19.htm
Datei: 20.htm
Datei: 21.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
III.4. Trägheitskräfte im beschleunigten
Bezugssystem
(vergleiche "Galilei - Transformation": Dort sind es zwei geradlinig gleichförmig
bewegte Systeme)
EP 1 - Skript
Die Koordinatenachsen seien parallel zueinander:
außerdem:
Für die Vektoren von r', v', a' gilt im System S' :
Die beiden Bezugssyteme S und S' sollen sich konstant beschleunigt relativ
zueinander bewegen.
Dann:
34 von 129
EP 1 - Skript
35 von 129
EP 1 - Skript
36 von 129
S sei ein Inertialsystem:
wobei gilt:
= -m *
d.h. in S' tritt zusätzlich zur (realen) Kraft
eine weitere Kraft -
sogenannte Trägheits oder Scheinkraft - auf, die ein in S' verankerter Beobachter
empfindet und die
also der Beschleunigung des Systems stets entgegengesetzt gerichtet ist.
Verallgemeinerung des 2. Newton'schen Gesetzes
auf beschleunigte Bezugssysteme
Beispiele: Frei fallender Körper. S' werde in diesem verankert
--> Die Tragheitskraft
hebt die in S (allein) wirkende Schwerkraft
auf, d.h. in einem frei fallenden Kasten erscheint die Schwerkraft ausgeschaltet!!
Beginnende Aufwärtsbewegung in einem Fahrstuhl
-->
entgegengesetzt zu
-->
d.h. beim Anfahren nach oben verstärkter Druck auf den Boden
EP 1 - Skript
Bei Abwärtsbewegung
37 von 129
ist hingegen der Druck auf den Boden
entsprechend vermindert
Abbremsen eines Pkw:
"der Fahrer fliegt an die Windschutzscheibe"
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 22.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
III.5 Gleichförmig rotierende Bezugssysteme
Der Körper sei relativ zum rotierenden System in Ruhe
Zentripetalkraft=
denn
-->Zentrifugalkraft = Trägheits- oder Scheinkraft
d.h. radial nach aussen
--> in S' Kräftegleichgewicht:
Der Körper bewege sich relativ zum rotierenden Bezugssystem mit
Geschwindigkeit
In S' wirkt dann als weitere Scheinkraft die Corioliskraft:
EP 1 - Skript
38 von 129
2 Beschreibungsweisen: S: Die Kugel behält wegen des Trägheitssatzes die
seitliche Geschwindigkeit der Scheibe bei.
Weil aber die "Scheibenteilchen" um so langsamer laufen, je näher sie an der
Drehachse liegen muss die Kugel während ihrer Bewegung zum Zentrum den
"Scheibenteilchen" vorauseilen, so dass sie relativ zur Scheibe eine gekrümmte
Bahn beschreibt.
S': Scheibe ist in Ruhe, Weil die Kugel relativ zur Scheibe eine gekrümmte Bahn
durchläuft, muss eine seitliche Kraft
Sie Steht
auf
und
einwirken.
.
Mit Hilfe der 3 Scheinkräfte
kann man in jedem beschleunigten Bezugssystem die Gesetze der Newton'schen
Meachanik in Kraft setzen
Echte Kräfte/Scheinkräfte
Echte Kräfte: - Haben ihren Ursprung in materiellen Körpern
- Hängen vom relativen Abstand der Körper ab
- Fallen mit wachsender Entfernung im allgemeinen ab
Scheinkräfte:
- Sind stets proportional zur Masse mt
- Es lassen sich keine Körper angeben, von denen sie ausgehen, d.h. es sind keine
echte Kräfte obgleich für Beobachter in S' genauso "real"
- Sie treten nur in Nicht-Inertialsystemen auf und können durch Übergang in ein
Inertialsystem vollständig zum verschwinden gebracht werden. Sie sind lediglich
Erfindungen, welche uns in die Lage versetzen, die Newtonsche Meachanik auch in
beschleunigten bewegten Bezugssystemen anzuwenden.
Unter den echten Kräften ist nur die Schwerkraft proportional zur Masse!
--> Grundlage des Äquivalenzprinzips --> Allgemeine Relativitätstheorie
EP 1 - Skript
39 von 129
Zentripetalkraft
= reale Kraft
Zentrifugalkraft
= Scheinkraft
[im rot. Bezugssystem]
!Unerlässlich: Sorgfältige Spezifikationen des Bezugssystems, d.h.
Beobachterstandpunkt
In einem Inertialsystem (z.B. Labor) möge eine Masse m gleichförmig auf einer
Kreisbahn vom Radius r umlaufen
1. beobachtungsstandpunkt: Labor
m unterliegt einer Zentripetalbeschleunigung
Folglich wirkt eine zum Mittelpunkt hin gerichtete Kraft, die sogenannte
Zentripetalkraft
, auf m
ist z.B.:
- die Gravitationsanziehung, die M auf m ausübt
- die nach innen gerichtete Fadenkraft, die von einem Zentrum M gehaltenen Faden
auf m ausgeübt wird
Diese und nur diese nach innen gerichtete Kraft wirkt im spezif. Inertialsystem auf m
und zwingt m auf die Kreisbahn
Aber: Actio = Reactio
EP 1 - Skript
40 von 129
Kugel übt eine entgegengesetzte gleiche, also nach aussen
gerichtete Kraft auf den Faden aus. Das spürt die haltende Hand als radial nach
aussen gerichteten Zug. Beachte dass diese Zugkraft als Reaktionskraft auf Hand
und Faden, nicht auf die Kugel wirkt!
Es wäre im gewählten Bezugsystem falsch zu sagen, auf die Kugel wirke eine nach
aussen gerichtete Zentrifugalkraft; denn Zentrifugalkräfte treten nur in rotierenden
(d.h. beschleunigten) Bezugssystemen auf!!!
Wechsel des Bezugssystems (Beobachterstandpunkt)
Mitrotierender Beobachter: Er befindet sich nicht mehr in einem Inertialsystem,
sondern in einem beschl. Bezugssystem
Dort in (x',y') gilt:
- weder das 1. Newton'sche Gesetz
- noch das 2. Newton'sche Gesetz
Das ist offensichtlich;
- denn obwohl über den gespannten Faden auf m eine zum Zentrum M hin
gerichtete Kraft wirkt, bleibt m für diesen Beobachter in Ruhe! Würde m auf eine
Drehscheibe ohne Faden reibungsfrei gelagert sein, würde m aus der Ruhe radial
nach aussen zu rollen beginnen!
Ein Trick erlaubt trotzdem die Newton'schen Gesetze auch in einem solchen
rotierenden anzuwenden:
Addiere im rot. System zu den echten auf m wirkenden Kräften (hier Fadenkraft auf
m) eine betragsmäßig gleich grosse, jedoch radial nach aussen gerichtete
Scheinkraft
- die sogenannte Zentrifugalkraft
--> m Kräftefrei (im Fadenbeispiel) --> bleibt also in Ruhe
{ wenn
≠ 0, so ist noch eine 2te Scheinkraft, die sog. Corioliskraft zu addieren}
Für den Beobachter in S'(x', y') sind diese Scheinkräfte genau so real wie die reale
Fadenkraft! Sie sind ∼ m !
2te Darstellungsweise für Beobachter in S'(x', y')
Der Beobachter wisse zunächst nichts von der Rotation seines Bezugssystems
gegenüber Labor 0 IS
-> er wird also zunächst annehmen, er befinde sich im IS
EP 1 - Skript
41 von 129
- über den Faden übt B eine Zentripetalkraft auf m aus
Da die Kugel in Ruhe bleibt, also kräftefrei ist,
- muss eine zweite entgegengesetzt gleiche Kraft auf m wirken --> Zentrifugalkraft
Sie wird als Scheinkraft bezeichnet
- weil sie ihren Ursprung nicht in Wechselwirkungen von m mit umgebener Materie
hat!!
- sondern lediglich dadurch bedingt ist, dass wir den Versuch vom Standpunkt eines
mitrotierenden Beobachters B beschreiben und dennoch die Gültigkeit der
Newton'schen Gesetze annehmen. Aus der Beobachtung dieser Zentrifugalkraft
könnte B folgern, dass S' (x', y') rotiert
Beispiel: Astronaut im Raumschiff auf Erdumlaufbahn
- beschreiben vom Standpunkt eines ortsfesten Erdbeobachters : IS
2. Newton'sches Gesetz: Masse * Zentripetalbeschleunigung = FGrav.
d.h. Raumschiff und Astronaut "fallen um die Erde herum".
- beschrieben vom Standpunkt eines mitrotierenden, also beschleunigten
Bezugssystems: S'
- Raumschiff und Astronaut ruhen, also kräftefrei!
WARUM??
--> Die zum Erdmittelpunkt hin gerichtete Gravitationskraft und die radial nach
aussen gerichtete zentrifugalkraft kompensieren einander --> Astronaut ist kräftefrei
MERKE!: Scheinkräfte treten nur in beschleunigten bezugssystem auf, wie z.B.
Zentrifugalkräfte in rot. Systemen
Weitere Beispiele (von beiden Beobachtungsstandpunkten diskutieren)
- Karausell
- mit Wasser gefüllter rotierender Eimer
[Wasseroberfläche = Rotationsparaboloid]
Zusätzliche Demonstrationen
(ebenfalls 2 Standpunkten diskutieren)
- Springende Fahrradkette
- Papierblattsäge
- Ball auf rot. Drehtisch, betrachtet von oben mit 2 Kameras (1.ortsfest,
2.mitrotierend)
EP 1 - Skript
42 von 129
Radialer Druckanstieg in einer rotierenden Flüssigkeit einer
Ultrazentrifuge
Bezugssystem: Mitrotierender Beobachter --> Flüssigkeit ruht für diesen i.e.
kräftefrei
erzeugt durch radialen Druckanstieg
m • ω2 • r = A • Δp
φf A • Δr • ω2 • r = A • Δp
--> g duch az = ω2 • r ersetzt ∼ ω2 !
∼r!
dp = φf • ω2 • r dr
p = p0 + ½ φf • ω2 (r2 - r20
r = r 0, p = p 0
quadratisch radialer Druckanstieg
Rotier. Flüssigkeit (Standp. beschl. Bezugssystem)
EP 1 - Skript
43 von 129
Rot. pendel
Beschl. beobachter
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 23.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
IV. Erhaltungsgrößen der Mechanik
IV.1. Kraft und Linearimpuls
Zunächst: "Masse "träge Masse = schwere masse)
wurde bsilang als unabhängig vom Bewegungszustand angenommen. - Dies ist für ϑ
<< c tatsächlich der Fall
--> "Ruhemasse"
--> - für ϑ -> c gilt dies nicht mehr!
---> Relativitätstheorie
- Aber auch im klassischem Fall kann m eine variable Größe sein (z.B. Rakete, die
durch Verbennung Treibstoffmasse verliert, s. später)
--> Im Sinne der Allgemeinheit ist es besser, den Bewegungszustand eines
Teilchens nicht alleine durch die Geschwindigkeit, sondern durch das Produkt aus
Masse und Geschwindigkeit zu beschreiben!
EP 1 - Skript
44 von 129
-->"Linearimpuls"
Linearimpuls
--> allgemeine Formulierung des 1. Newton'schen Gesetzes:
1. Newton'sches Gesetz
"Der Impuls eines freien Teilchens ist stets konstant."
--> Newton'sche Bewegungsgleichung:
Newton'sche Bewegungsgleichung
Die Integration dieser Form der Newton'schen Bewegungsgleichung ergibt
"Kraftstoß"
In Fällen, in denen F(t) bekannt ist, ist auch
bekannt!
--> Integration der Newton'schen Bewegungsgleichung:
- Im allgemeinen Fall ist
- Ist also die Masse m als Funktion der Zeit bekannt, so erhält man:
Beispiel: Reibungsfreie Bewegung eines Körpers mit gleichmäßig abnehmender
EP 1 - Skript
45 von 129
Masse
-
=F*
m(t) = m0 * (1 - K * t)
-t = 0:
0 = 0 =>
0=0
0=
0 * m0
=v*
=p*
=m*v*
für
Da F = const. =>
F dt = F *
dt = F * t
=> F * t = p(t) = m * v = m(t) * v(t)
F * t = m0 * (1 - K * t) * v(t)
=>
für
(für
wird m = 0 !)
Integration der Ortskurve:
EP 1 - Skript
46 von 129
für
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 24.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
IV.2. Drehmoment und Drehimpuls
Allgemeinheit der Newton'schen Bewegungsgleichung: -->Linearimpuls
Bei der Integration der Newton'schen Bewegungsgleichung (-> Bahnkurve) ist es in
vielen Fällen sinnvoll, den Drehimpuls zu benutzen:
Im allgemeinen ändert sich
in Betrag und Richtung bei der Bewegung des
Teilchens.
Spezialfall: Bahnbewegung verläuft in einer Ebene, in der sich auch der
Koordinatenursprung befindet
EP 1 - Skript
47 von 129
Zerlege die Bahngeschwindigkeit in
- einen Anteil parallel zu
- einen Anteil senkrecht auf
(radialer Anteil)
(d.h. ||
Es gilt wie immer:
Δφ → 0 => sinΔφ = Δφ und cosΔφ = 1
=>
x
)
EP 1 - Skript
48 von 129
Verallgemeinerung des Zusammenhanges
,
,
bei
Kreisbewegung!
Mit
=
x
=
x (m •
=
x (m •
)
+m•r•
xm•
=> r •
))
= 0 + m • r2 •
=>
= m • r2
Hierbei wurde verwendet:
x
=0
+r•
(
x (m • r •
x
))
(
x
EP 1 - Skript
49 von 129
x(
x
)=
Für die Kreisbewegung gilt
=
=>
"I": Trägheitsmoment [I] = kgm2
vergleiche:
=m•
Auch für allgemien krummlinige Bewegungen kann
=
definiert werden! Dann ist jedoch
Zusammenhang
<-->
(Winkelgeschwindigkeit
≠ m • r2 •
analog für krummlinige Bewegung:
!!
EP 1 - Skript
50 von 129
Die zeitliche Änderung des Drehimpulses wird durch einen Vektor (
bewirkt! Diesen Vektor nennt man Drehmoment
vergleiche:
geradlinige Bewegung
krummlinige Bewegung
Lineargeschwindigkeit
Winkelgeschwindigkeit
=
=
Linearimpuls
=m•
Drehimpuls
=
x
x
)
EP 1 - Skript
51 von 129
=I•
Kraft
Drehmoment
Masse m
Trägheitsmoment I
=
Beispiel: Bewegung eines Teilchens unter dem Einfluss einer Zentralkraft
"Zentralkraft" ist stets auf einen Punkt eines Intertialsystems gerichtet (z.B.
Ursprung)
=F•
x
{
x
=
x
= (r •
=0=
) x (F •
)=0}
Teilchen unter Einfluss einer solchen Zentralkraft also:
=
= 0 =>
=L•
= const. ?
= m • r2ω
ω=
Für Zentralkräfte ist also
eine Konstante der Bewegung
("Drehimpulserhaltung")
Damit ist auch die Richtung von
zeitlich konstant!
EP 1 - Skript
52 von 129
Im Allgemeinen sind sowohl r als auch ω eine Funtion der Zeit.
Wegen
= m • r2 •
•
= const. gilt aber:
(m = const.)
Den Differenzenquotienten:
nennt man "Flächengeschwindigkeit"
dA = ½ • r • r dφ = ½ • r 2 dφ =>
Diese Aussage ist identisch mit dem 2. Kepler'schen Gesetz:
"Bei der Bewegung eines Planeten um die Sonne überstreicht der Ortsvektor in
gleichen Zeiten gleiche Flächen."
Das 2. Kepler'sche Gesetz folgt also unmittelbar aus der Drehimpulserhaltung.
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 25.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
IV.3 Arbeit und Leistung
Aufgabe der Dynamik: Integration der Newton'schen bewegungsgleichung
Ist die Kraft als Funktion der Zeit
bekannt, son funktioniert dies auch
bestens.
Im allgemeinen ist jedoch nicht
, sondern
bekannt. Die Lösung
EP 1 - Skript
53 von 129
der Newtonschen Bewegungsgleichung lässt sich in diesem Fall durch Einführung
der fundamentalen größe ENERGIE bewältigen
Arbeit
Teilchen (Masse m) bewegen sich unter dem Einfluss einer Kraft
Bahnkurve
längs einer
im Zeitintervall dt um
Wir definieren die Arbeit dW, die von der Kraft
.
längs des Weges
geleistet wird:
Unter EInführung der tangentialen Kraftkomponente
erhält man
--> Bei bekannter Bahnkurve und bekannter Funktion
kann man die
Gesamtarbeit ausrechnen, die die Kraft längs des Weges von A nach B leistet:
[W] = [F] • [s] = kg • m2/s2 = N • m = W • s =
EP 1 - Skript
54 von 129
Trägt man den Betrag der tangentialen Kraftkomponente als Funktion des Weges
längs der Bahnkurve auf, so ergibt sich die Arbeit
als Fläche unter der Kurve
Arbeit als Linienintegral:
Ein Integral der Form
Mit
heißt "Lienienintegral".
kann man schreiben:
EP 1 - Skript
55 von 129
Beispiele zum Arbeitsbegriff:
(1) Normalkraft:
Wie die Beschleunigung bei der beliebigen Bewegung eines Teilchens kann auch
die entsprechende Kraft in eine Normal- und eine Tangentialkomponente aufgeteilt
werden.
Wegen
führt nur die Tangentialkomponente zu
einer Arbeit W ≠ 0!
Für die Normalkomponente
gilt wegen
stets W = 0!
--> Beispielsweise leistet die für eine Kreisbewegung konstante
Bahngeschwindigkeit verantwortliche Zentrifugalkraft keine Arbeit.
(2)Bewegung unter Einfluß einer Reibungskraft:
Bewegung eines Körpers verlaufe unter Einfluß von Reibungskraft
auch noch andere Kräfte
. Es können
wirken, so daß Bewegung kompliziert.
Hier: Arbeitsanteil durch Reibung?
--> die durch Reibungskraft bewirkte Arbeit ist negativ und hängt von der Länge des
Weges zwischen A und B ab!
--> man wähle zum schieben einer schweren Kiste den kürzesten Weg!
(3) Konstante Kraft (z.B. Schwerkraft):
Es können neben der konstanten Kraft (z.b.
) ruhig noch andere Kräfte wirken,
die die Bahnbewegung kompliziert machen.
Hier interessiert nur der Beitrag der durch
bewirkten Arbeit
EP 1 - Skript
56 von 129
-->
unabhängig vom Weg!! Nur von Höhendifferenz!!!
(4) Federkraft:
Unter der Wirkung der Dederkraft werde das Teilchen von
Arbeit?
nach
bewegt.
EP 1 - Skript
57 von 129
LEISTUNG: Charaktisiert die Geschwindigkeit, mit der eine bestimmte Arbeit bewirkt
wird.
"Momentanleistung":
Unter Verwendung der Definition für Arbeit (s.o.)
Ganz entsprechend ist die Arbeit, welche bei der Verschiebung im Gravitationsfeld
durch eine äußere Kraft
(
verrichtet wird:
= 0 !)
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 26.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
bisher:
Erhaltung der mechanischen Energie für ein Teilchen, welches sich unter der
Einwirkung der Gravitationskraft bewegt.
Verallgemeinerung auf sogenannte konservative Kräfte:
Damit der Begriff der potentiellen Energie sinnvoll definiert werden kann, müssen die
wirkenden Kräfte konservativ sein.
Sei
(natürlich ist jedoch
= Arbeit, die
verrichtet
, d.h. nicht von t und/oder v abhängig
= g(t))
bei Verschiebung des Teilchens von P1 → P2 am Teilchen
EP 1 - Skript
58 von 129
oder
ist konservativ, wenn für jeden beliebigen geschlossenen Weg gilt:
d.h. die Arbeit ist wegunabhängig!
1. Beispiel einer konservativen Kraft:Gravitation/Feder
Es war (siehe IV.5.)
Beispiel einer nicht - konservativen Kraft:
Gleitreibungskraft: Je länger der Weg P1 → P2 gewählt wird, desto größer ist die
Reibungsarbeit.
Auf einem geschlossenen Weg ist WReib < 0; denn
Bewegungsrichtung entgegengesetzt gerichtet!
Potentielle Energie einer konservativen Kraft
Reib ist stets der
EP 1 - Skript
Normierung willkürlich: z. B. U(P0) = σ
=> 1. Die Änderung der potentiellen Energie U(P2) - U(P1) ist gleich dem negativen
Wert der Arbeit, welche die konservative Kraft auf dem Weg P1 → P2 verrichtet,
denn:
→ Die Wahl des Bezugspunkts P0 und die Wahl (Normierung) von U(P0) geht nicht
in die Berechnung der Differenz der potentiellen Energie ein!
d.h. nur Änderungen der potentiellen Energie sind physikalisch bedeutsam, nicht ihr
Absolutwert!
=> 2. Die gesamte mechanische Energie (Summe kinetischer + potentieller Energie)
ist eine Erhaltungsgröße
denn (siehe IV.5.):
mechanische Energie E := K + U eine Erhaltungsgröße. Die Abgeschlossenheit
des betrachteten mechanischen Systems ist stets vorausgesetzt.
Beispiele: 1. Bewegung einer Masse m im Gravitationsfeld
59 von 129
EP 1 - Skript
d.h. die potentielle Energie U(P) hängt nur von z ab und der Energieerhaltungssatz
lautet:
Daraus lässt sich z.B. die Steighöhe von m oder (beim freien Fall) die
Aufprallgeschwindigkeit bie z = 0 berechnen.
2. Beispiel: Elastische Feder
60 von 129
EP 1 - Skript
Wähle als Bezugspunkt P0 x = ∞ und setze dort U(P0) = 0, d.h. die potentielle
Energie wird im Unendlichen auf Null normiert.
Die Kraft ist zum Zentrum x = 0 gerichtet, d.h. anziehend
Wenn mehrere konservative Kräfte gleichzeitig auf ein Teilchen einwirken, so ist:
und der Energieerhaltungssatz lautet:
K + Utotal = konst.
Wenn außerdem nicht - konservative Kräfte wirken (wie z.B. Gleitreibung), so gilt
61 von 129
EP 1 - Skript
62 von 129
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 27.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
IV.5. Kinetische Energie und potentielle Arbeit
Kinetische Energie
Bei der Verschiebung einer Masse von P1 → P2 sei die auf das Teilchen wirkende
resultierende Kraft
Die Kraft
= f(x,y,z)
verrichtet die Arbeit:
EP 1 - Skript
63 von 129
d.h. die von der resultierenden einwirkenden Kraft
verrichtete Arbeit ist für
1 → 2 ~ (v
2
2
2 - v1 )
Bleibt die Geschwindigkeit konstant (v2 = const.), so
result. = σ (Folge der
Gleichgewichtsänderung) (mit: σ: Nullvektor)
Definition: kinetische Energie eines Teilchens
[W] = [K] im SI-System: 1 N • m = 1 Joule
d.h. die Arbeit, welche die an den Teilchen angreifende resultierende Kraft
verrichtet, ist gleich der Änderung seiner kinetischen Energie
W=ΔK
wenn W1 → 2 > 0, so ist K2 - K1
Wenn speziell
result. = σ, so ist Δ K = 0 !
stets K ≥ 0 entspricht gespeicherter Fähigkeit Arbeit zu verrichten => "latente Arbeit"
Beispiel: Wasserrad
EP 1 - Skript
64 von 129
Typische kinetische Energien (in Joule):
Joule [J]
Bahnbewegung der Erde
2,6 • 1033
Rotation der Erde
2,1 • 1029
Boeing 747 bei vmax
7 • 109
Pkw mit v = 100 km/h
≈ 5 • 105
Gewehrkugel
4 • 103
Energereichste Teilchen der kosmischen Strahlung 50 J (!)
fallender Regentropfen
4 • 10-5
Spaltfragment U235
2,6 • 10-11
Luftmolekül bei Zimmertemperatur
6,2 • 10-21
(alternative Schreibweise!)
entspricht latenter Arbeit => gespeicherte Fähigkeit, Arbeit zu verrichten, wegen der
Geschwindigkeit v ≠ 0
Potientiell Energie der Lage im homogenen Gravitationsfeld
EP 1 - Skript
65 von 129
willkürlich, hier U(0) = 0
Bedeutsam ist allein Δ U = U(z2) - U(z1)
=> Die Änderung der potentiellen Energie zwischen P1 und P2, d.h. (U2 - U1) ist
gleich dem negativen der Arbeit, welche die Gravitationskraft am Teilchen bei
Verschiebung von P1 → P2 verrichtet
= Hubarbeit bei Verschiebung von z1 → z2 > z1
Die potentielle Energie entspricht der gespeicherten Fähigkeit, Arbeit zu verrichten
und vermöge der Lage des Teilchens im Raum.
Bewegungskonstante des Teilchens auf seiner Bahn P1 → P2
Definition der mechanischen Energie eines Teilchens (hier exemplarisch für
das homogene Gravitationsfeld):
E = K + U(z)
mit U(z) = m • g • z
Mechanische Energie entspricht der gespeicherte Fähigkeit, Arbeit zu verrichten und
vermöge der Geschwindigkeit und Lage des Teilchens im Raum
K + U(z) = const. besagt, dass die mechanische Energie eines Teilchens konstant
bleibt, sofern die einzige auf das Teilchen wirkende Kraft die Gravitationskraft
(allgemein (siehe IV.4.) eine sogenannte konservative Kraft) ist.
Gesetz der Erhaltung der mechanischen Energie:
Verallgemeinerung:
Die Summe aus potentieller und kinetischer Energie eines abgeschlossenen
Systems ist unveränderlich, wenn nur konservative Kräfte auftreten!
Beispiele:
- Freier Fall aus geringer Höhe
- Kreisbahngeschwindigkeit eines Satelliten
- Fluchtgeschwindigkeit
- Pendel
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 28.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
EP 1 - Skript
IV.6. Energieerhaltung
Berechnung der Kraft aus der potentiellen Energie:
Sei die Verschiebung ausschließlich in x-Richtung, d.h. dy = dz = σ
Bewegung eines Teilchens in einer Dimension (x-Achse) unter Einfluss einer
konservativen Kraft
Wenn U(xi) = E => vi = 0
Beispiel: Teilchen in einem eindimensionalen Potentialtopf 3 E - Werte
Gesamtenergie des Teilchens < σ
0: v = vmax → K = Kmax
x = a und x = b: v 0 σ
Umkehrpunkte des Teilchens: k = 0
=> a ≥ x ≥ b => im Potentialtopf gebundenes Teilchen
Die Lage der Umkehrpunkte a und b ist f(E)!
66 von 129
EP 1 - Skript
0 ist die stabile Gleichgewichtslage
horizontale Tangente im Punkt x = x0 !
Spezialfall (3.):
- Es gibt nur einen (linken) Umkehrpunkt - Das Teilchen kann nach rechts x => ∞
entkommen: ungebundener Zustand (E > 0)
Annahme:
abgeschlossens System
nicht-mechanische Kräfte werden zugelassen
mechanische Energie ist keine Erhaltungsgröße mehr, z.b. wird sie bei der
Einwirkung von Reibungskräften vermindert!
=> die mechanische Energie wird teilweise oder vollständig in andere Energieformen
transformiert
z.B. in:
- ungeordnete kinetische und potentielle Energie der Atome/Moleküle =
Wärmeenergie Reibung erzeugt Wärme
- chemische Energie
- elektrische/magnetische Energie
- Strahlungsenergie
- Kernenergie usw.
Gebräuchliche Energieeinheiten
1 Joule = 1 N • m [= 1 Watt • Sekunde]
1 Elektronenvolt(eV) = 1 eV = 1,602 • 10-19 J
1 kWh = 1 kW • h = 103 • 3,6 • 103 W • s = 3,6 • 106 J
1 kcal = 4,187 • 103 J
67 von 129
EP 1 - Skript
68 von 129
Die Gesamtenergie eines abgeschlossenen Systems bleibt erhalten =
Verallgemeinerter Energieerhaltunssatz
Typische Energien:
Joule [J]
Kernbrennstoffvorrat der Sonne
1 • 1045
typische Supernova-Explosion
1 • 1044
fossiler Brennstoffvorrat der Erde
≈ 2 • 1023
jährlicher Energieverbrauch der USA
8 • 1019
Krakatoa-Vulkan-Explosion
6 • 1018
Annihilation von 1 kg Materie/Antimaterie
9 • 1016
Explosion einer H-Bombe der Masse 1 Megatonne
4,2 • 1015
Spaltung von 1 kg Uran
8,2 • 1013
Potentielle Energie einer Boeing 747 in 10.000 m Höhe 2 • 1010
Blitz
1 • 109
4 l Benzinverbrennung
1,3 • 108
Explosion von 1 kg TNT
4,6 • 106
Verzehr von einem Apfel
4,6 • 105
K (laufender Mensch)
≈ 4 • 103
Spaltung eines einzelnen Uran-Kerns
3,2 • 10-11
Ionisationsenergie eines H-Atoms
2,2 • 10-18
HINWEIS:
Masse und Energie (Einstein 1905)
Masse kann in Energie und Energie in Masse transformiert werden!
1. =>
EP 1 - Skript
2. =>Energie hat Masse !
d.h. wenn sich der Energieinhalt eines Körpers/Systems um Δ E ändert, ändert sich
seine Masse (und entsprechend auch sein Gewicht), und zwar um:
Masse eines ruhenden Teilchens = sogenannter Ruhemasse
d.h. die Masse ist ebenso wenig wie die Energie invariant.
Beispiele:
(1) Schwerependel
Punkte A, B (Umkehrpunkte):
* EP = m • g • h; Ek = 0
* E = (EP + Ek)A = (EP + Ek)B = (EP + Ek)0 = m • g • h
--> Punkt O (Ruhelage):
EP = 0 => m/2 •v02 = m • g • h =>
69 von 129
EP 1 - Skript
Berechnung von φ(t)
E = const. => m/2 •v02 = m • g • z = m • g • h
=> v = √2 • g • (h - z) ; (v 0 ≥0)
Für kleine Winkel gilt (s. Abb. b):
s = l • φ ; z = s • φ/2 => z = l/2 • φ 2 ; h = l/2 • φ02
(2) Harmonische Schwingung durch Federkraft:
Epot(Feder) = D/2 • x02 (s.o.)
* Punkte A, B (Umkehrpunkt): Ep = D/2 • x02 , EK = 0
* Punkt 0 (Ruhelage) : Ep = 0 , EK = m/2 • v02
E = const. => m/2 • v02 = D/2 • x02
70 von 129
EP 1 - Skript
71 von 129
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 29.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
V. Massenpunktsysteme
V.1 Die Newton'sche Bewegungsgleichung
EP 1 - Skript
72 von 129
: Kraft, die von Teilchen j auf Teilchen i in S ausgeübt wird ("innere Kräfte")
: resultierende äußere Kraft auf Teilchen i
Anwendung der Newton'schen Bewegungsgleichung liefert n Gleichungen:
Newton'sche Bewegungsgleichung für Teilchen i
Falls alle
und
bekannt sind, kann dies nur für jedes Teilchen i gelöst
werden.
Falls nicht, muss man über die resultierende Gesamtkraft vorgehen:
System von Massenpunkten:
Nun ist:
Ausserdem gilt "actio = reactio" (3. NewtonGes.)
EP 1 - Skript
73 von 129
"Für die Wirkung der resultierenden äußeren Gesamtkraft spielen die inneren Kräfte
des Systems keine Rolle"
Weiter kann man schreiben:
<=> "Gesamtimpuls
":
Dadurch erhalten wir schliesslich:
...hat die Form einer Newton'schen Bewegungsgleichung!
=> Es muss also einen Massenpunkt geben für den Gleichung (*) die Bewegung
beschreibt!
Welcher Punkt ist das, welche Eigenschaften hat er?
(Gesamtimpuls dieses Massenpunktes)
Sei
der Ortsvektor des gesuchten Massenpunktes, M sei seine Masse,
EP 1 - Skript
Der durch
74 von 129
und
beschriebene Punkt heißt Massenmittelpunkt
des Systems.
Der Massenmittelpunkt bewegt sich unter dem Einfluss der äußeren Gesamtkraft so,
als wäre in ihm die Gesamtmasse des Systems vereinigt!
Beispiel 1:MMP zweier Massenpunkte
z.B. m1 = m2 => r1' = r2' = ½ r12'
Beispiel 2: MMP für drei Massenpunkte
Reduktion Zweikörperproblem -> Einkörperproblem
Zwei Massenpunkte m
1 und m2
Vernachlässige externe Kräfte
EP 1 - Skript
75 von 129
Führe
Relativ-Größen ein
: Relativer Ortsvektor
: Relative Geschwindigkeit
: Relativbeschleunigung
Weiter kann die
reduzierte Masse μ definiert werden:
=> Newton'sche Bewegungsgleichung für dir Relativbewegung:
Labor- und Schwerpunktsystem:
"Laborsystem": fest mit Labor verknüpft
Intertialsystem
EP 1 - Skript
76 von 129
äußere Kräfte = 0
=> MMP bewegt sich geradlinig, gleichförmig
=> Das mit MMP verknüpfte Koordinatensystem ist ebenfalls Intertialsystem
(Galilei-Transformation)
"Schwerpunktsystem
Damit kann
und
berechnet werden:
wobei
Im Schwerpunktsystem gilt also:
EP 1 - Skript
77 von 129
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 30.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
V.2. Erhaltungssätze
(1) "Ein System heißt abgeschlossen, wenn auf seine Massenpunkte keine äußeren
Kräfte wirken."
Nach den Ausführungen in (V.1) gilt:
In einem abgeschlossenen System bleibt der gesamte Linearimpuls erhalten!
(2) Drehimpuls
Gesamt - Drehimpuls
Gesamt Drehmoment
In einem abgeschlossenen System bleibt Gesamt-Drehimpuls erhalten
(3)Gesamtenergie:
Aus dem System werde
willkürlich zwei Teilchen i, j herausgegriffen:
Im Zeitintervall dt bewege sich m
i um
, mj um
geleistete Arbeit gilt:
. Für die durch die auf mi und mj wirkende Kräfte
EP 1 - Skript
also da
Gesamtarbeit der äußeren Kräfte:
Anfangszustand A
Endzustand B
Gesamtarbeit der
inneren Kräfte:
Gesamte
kinetische Energie
Gesamte innere
potentielle Energie:
Gesamte
78 von 129
EP 1 - Skript
79 von 129
Eigenenergie des Systems:
U = EK + EP, int und Wext + Wint = EK,B - EK,A
Schliesslich folgt für
= 0 (i = 1...u) der
Energie-Erhaltungs-Satz:
In einem abgeschlossenen System bleibt die gesamte Eigen-Energie konstant.
Für konservative Kräfte gilt ausserdem:
bzw.
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 31.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
V.3. Wechselwirkung mit kurzer Reichweite
"Stoßgesetze"
Vor dem Stoß:
EP 1 - Skript
Stoßbereich:
Nach dem Stoß:
da das System abgeschlossen ist, gilt (s.o.) der Impuls-Erhaltungssatz:
Ebenso gilt der Drehimpuls-Erhaltungssatz (kann aber bei zwei Massenpunkten
unberücksichtigt bleiben)
Energieerhaltung:
mit EP,int(r12 -> ∞) = 0 = E'P,int (r'12 -> ∞)
BEISPIELE:
(1) Vollkommen elastischer, zentraler Stoß
80 von 129
EP 1 - Skript
(2) Vollkommen elastischer, schiefer Stoß:
m2 zunächst in Ruhe
(3) Vollkommen unelastischer zentraler Stoß:
81 von 129
EP 1 - Skript
82 von 129
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 32.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
VI. Starrer Körper
VI.1. Starrer Körper als System von Massenpunkten
Definition: Starrer Körper: System von Massenpunkten, wobei alle Abstände der
M.P. untereinander konstant sind
=> Ein starrer Körper behält insbesondere seine äußere Form unter dem EInfluß
beliebiger Kräfte bei!
Gesamtmasse M:
Für
homogene Körper: φ = const; überall
Für
inhomogene Körper: φ =f(x,y,z)
EP 1 - Skript
Massenpunkte:
vgl. MMP für System aus Massenpunkten
Für
homogene Körper ist
Beispiele für Berechnung des MMP:
"Quader"
83 von 129
EP 1 - Skript
84 von 129
Massenpunkt homogener Quader
MMP ist Schnittpunkt der Raumdiagonalen
homogene Körper: MMP ist
Symmetriepunkt!
Massenmittelpunkt = Schwerpunkt!
System u. Massenpunkte:
Seien
z.B. durch Schwerkraft gegeben:
(s.o.)
EP 1 - Skript
85 von 129
Kraft und Angriffspunkt:
Starrer Körper (s. Definition) verändert seine
Form unter Wirkung bel. Kräfte nicht!
<=> Idealisierung des 'realen Körpers'
Wie wirkt
äußere Kraft auf starren Körper?
In einem
starren Körper seien willkürlich zwei Punkte A und B herausgegriffen. In A wirke die
, in B die Kraft
Es Felte
und
=> "Der Angriffspunkt einer äußeren Kraft ist auf der Wirkungslinie beliebig
verschiebbar, ohne daß sich die Wirkung auf den starren Körper dadurch ändert."
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 33.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
"Statik" beschreibt diejenigen Bedingungen, die herrschen müssen, damit ein starrer
Körper in Ruhe ist. (Gleichgewichtsbedingungen)
Äußere Kräfte --> Wirkung auf Körper??
EP 1 - Skript
folgt unmittelbar:
"Die Bewegung eines starren Körpers unter dem Einfluß äußerer Kräfte kann
vollständig durch eine Translationsbewegung des MMP infolge der resultierenden
Gesamtkraft Fext und durch das bzgl. des MMP wirkende gesamtdrehmoment Mext
beschrieben werden!"
=> "Gleichgewichtsbedingungen" für starren Körper
Für vollständig frei bewglichen Körper ist dies OK
Falls aber nur
bestimmte Drehachsen zugelassen sind, muß modifiziert werden:
(a)Einarmiger Hebel:
Gleichgewichtsbedingungen:
86 von 129
EP 1 - Skript
Gleichgew.:
(b)Zweiarmiger Hebel:
(c)Gleichgewicht unter Einfluss der Schwerkraft
Der Schwerpunkt kann i.a. innerhalb oder auch außerhalb des starren Körpers
liegen!
87 von 129
EP 1 - Skript
88 von 129
Gleichgewichtslagen:
"Stabiles Gleichgewicht": kleine Lageänderung bewirkt Bewegung in die
Ursprüngliche Lage zurück."
Lage der geringsten Potenziellen Energie!
Aufhängung
Kippen
Bewegung einer Kugel in einer Schale
Epot = m • g • h = 0 ; Epot = m • g • h = m • g • z ∋ 0 !
EP 1 - Skript
89 von 129
Balkenwaage
Labiles Gleichgewicht:
Indifferentes Gleichgewicht:
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 34.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
VI.3 Dynamik des starren Körpers Rotation um feste
Achsen
EP 1 - Skript
Bewegung des starren Körpers geschehe in einem Inertialsystem.
reine Translation: Bahnkurve beliebig, Koordinationorientierung jedoch konstant!
Zeitliche Äußerung der Achsenorientierung
--> Rotation mit i.a. zeitliche variabler Winkelgeschwindigkeit
Drehbewegungen um feste Achsen
Für
jeden Massenpunkt des starren Körpers gilt:
90 von 129
EP 1 - Skript
91 von 129
Allgemein glit für Vektoren
Mit
externes Drehmoment
ergibt sich für die insgesamt durch ein
bewirkte Leistung P:
Integration liefert die bei Drehmoment von 0 -> φ geleistete Arbeit:
(a) Wixforth auf Drehstuhl I (Hanteln)
Lz,1 = Lz,2 (drehimpulserhaltung)
--> Iz,1 • ω2 = Iz,2 • ω1
Iz,2 > Iz,1 --> ω2 < ω1
(b) Wixforth auf Drehstuhl II (Fahrradkreisel)
EP 1 - Skript
(i)
92 von 129
=0
(ii) Rad in Drehung -> Lz,1 = - Lz,2
(iii) Wird Lz,2 geändert, ändert sich der Gesamtdrehimpuls
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 35.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
VI.4. Rotation um freie Achsen
Kreisel
Forderung der festen Achse (bezogen auf Intertialsystem) wird fallen gelassen.
I.a. sind
und
eines rotierenden Körpers keineswegs gleichgerichtet.
Achsen, bei denen
||
:
Haupt-Trägheits-Achsen
Allgemein gilt: (
nicht notwendigerweise ||
)
EP 1 - Skript
93 von 129
(s.o.)
Für Vektoren
gilt allgemein:
Also:
Für den gesamtdrehimpuls erhält man:
In Koordinaten zerlegt:
=>
Sehr kompliziert für allg. Fall! Mann kann L i.a. nicht mehr durch Trägheitsmomente
bezüglich fester Achsen darstellen <=> Auftreten gemischter Glieder xy, xz...
(Ohne Beweis):
Es gibt für jeden starren Körper bestimmte, aufeinander senkrecht stehende Achsen
x0, y0, z0, für die diese gemischten Terme verschwinden!
Diese Achsen
(Hauptträgheitsachsen) verlaufen durch den Massenmittelpunkt MMP.
Die auf die Hauptträgheitsachsen bezogenen Trägheitsmomente heissen
Hauptträgheitsmomente I1, I2, I3
EP 1 - Skript
94 von 129
In dem mit dem starren Körper
fest verbundenen Koordinatensystem x0, y0, z0 vereinfacht sich die Darstellung für
Lx, Ly, Lz zu:
Für regelmässige, homogene Körper sind die Jauptträgheitsachsen dientisch mit
den Symmetrieachsen des körpers!
Kreisel
"Kreisel": jeder freie oder höchstens in
einem Punkt festgehaltener, rotierender Körper
Als Koordinatensystem wählen wir das mit der WInkelgeschwindigkeit des starren
Körpers rotierende bezugssystem der Haupt-Trägheitsachse S'.
In einem Inertialsystem S lautet die BWGl.
Stellen wir
nicht im ruhenden Inertialsystem, sondern in mitrotierenden
Bezugssystem S' dar, so wird (s. "beschl. Bezugssystem")
mit
folgt
EP 1 - Skript
95 von 129
Mit
ergeben sich die
Euler'schen Gleichungen:
(a) Kräftefreier symmetrischer Kreisel
Kreisel mit
Rotationsenergie bzg. einer Hauptträgheitsachse (
)
EP 1 - Skript
96 von 129
einfachste Rotation: Bewegung um die Figurenachse ( ||
Wegen
)
const.
=> Rotation
dauernd um die raumfeste Figurenachse ||
Bei der
allgemeinen Bewegung des kräftefreien, symmetrischen Kreisels ist normalerweise
ω1 ≠ ω2 ≠ 0. Dennoch: Falls
=> raumfeste Drehimpulsachse
aus den Euler - Gleichungen folgt: (M
1=M2=M3=0, I1=I2)
= const.
EP 1 - Skript
97 von 129
EP 1 - Skript
98 von 129
(DGL)
Lösung dieser DGL für ω
1, ω2 lautet:
(*)
ω1 = A • cos Ωt
ω2 = A • sin Ωt
ω3 = const (s.o.)
senkrecht zur Figurenachse rotiert
um die Fig.Achse.
in Richtung der Figurenachse ist konstant
bewegt sich auf einem Kegel um die Figurenachse
(Gangpolkegel)
der Betrag von
|
ist nach (*) konstant
| = const.
Wegen
= 0 gilt ja
Betrachte die Komponenten von
:
(momentane Drehachse) in Richtung von
EP 1 - Skript
99 von 129
(wichtige Erkenntnis!!)
Also:
Da A, I
1, ω3, I3, |
| konstand sind
=> Die Komponenten von
in Richtung von
ist ebenfalls konstant!
bewegt sich auf einem Kegel um die Figurenachse (s.o.)
"Gangpolkegel"
und
bewegt sich auf einem Kegel um die raumfeste Drehimpulsachse
"Rastpolkegel"
Gangpolkegel rollt auf Rastpolkegel ab => Figurenachse bewegt sich
auch auf einem Kegel "Nutationskegel"
EP 1 - Skript
100 von 129
(b) Symmetrischer Kreisel unter Einfluss von
I1 = I 2
Sei etwa
und
es ändert sich
nur die Richtung von L
und
EP 1 - Skript
wegen
mit |
101 von 129
= const. ist auch |
| = const.
| = const.
Präzessions-WInkelgeschwindigkeit Ω
= const
,
,
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 36.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
Gesetze der Mechanik sind für alle mit
gleichförmiger Translationsbewegung gegeneinander bewegten Bezugssysteme
dieselbe.
=> invariant gegenüber der Galilei-Transformation
=>Durch Messungen innerhalb eines bestimmten Bezugssystems keine Aussage
über mögliche gleichförmige Bewegung gegenüber anderen Bezugssystemen
möglich!
Ein absolut ruhendes Bezugssystem ("Ether") existiert nicht.
Apparat samt Lichtquelle auf der Erde
Relativgeschwindigkeit Erde ↔ "Ether" sei V
Für V = 0 sind Laufzeiten ABAD und ACAD gleich
Für V ≠ 0 sind Laufzeiten
AB'A'D' (T||) und AC'A'D' (T_|_) bei Gültigkeit der Galilei'schen Transformation
verschieden!
=> Man würde eine Phasenverschiebung Δ x erwarten.
Galilei
=>
c' = c - V für AB'
c" = c + V für B'A'
EP 1 - Skript
102 von 129
Beide Zeiten t
|| und t_|_ sollten also bei Existenz eines ruhenden Bezugssystems ("Ether")
verschieden sein.
=> Dies ist jedoch nie beobachtet worden!!!
=> "Relativitätsprinzip" (Einstein 1905)
"Die Naturgesetze sind für alle Bezugssysteme, die sich in gleichförmig
translatorischer Bewegung relativ zueinander bewegen, gleich, d.h. die
Naturgesetze sind gegeneinander einemm derartigen Wechsel der Bezugssysteme
invariant."
?? Ist die Galilei-Transformation falsch??
MM-Experiment:
t|| = t_|_
um trotz Transformation dieses Ergebnis zu erhalten, muss offenbar etwas
"seltsames" gelten:
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 37.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
VII.2. Lorentz - Transformation
Aus dem (negativen) Ergebnis des MM-Experiments (und aus vielen anderen) folgt:
Damit
alle Naturgesetze, insbesondere die der Elektrodynamik (Maxwell-Gleichungen,
siehe 2. Semester) bei Translationsbewegungen des Bezugssystems erhalten
bleibe, muss die Galilei-Transformation unter anderem durch die
Lorentz-Transformation ersetzt werden. (ohne Beweis)
Betrachte zwei Bezugssysteme:
EP 1 - Skript
Unter Anwendung der Lorentz-Transformation folgt für die Geschwindigkeit:
=> Konstanz der Lichtgeschwindigkeit (vergleiche Michelson-Morley-Experiment)
103 von 129
EP 1 - Skript
104 von 129
Setze die in S gemessene Lichtgeschwindigkeit
außerdem:
c ist die absolut größte Geschwindigkeit!
Gäbe es ein V > c =>
wäre imaginär
Lorentz-Kontraktion:
Betrachte die Länge L eines Stabs:
Für gegenüber dem Stab in
Ruhe befindlichen Beobachtern kein Problem.
Für einem gegenüber dem Stab gleichförmig translatorisch bewegten Beobachter:
Positionen von A und B müssen gleichzeitig gemessen werden!!
Annahme: Stab und Relativgeschwindigkeit parallel zur x - Achse:
EP 1 - Skript
Betrachte die Koordinaten (x
A, xB) und (x'A, x'B)
Mit L = x
A - xB und L' = x'A - x'B
Transformation eines Zeitintervalls:
"Zeitintervall": Zeitabstand zwischen zwei "Ereignissen"
105 von 129
EP 1 - Skript
106 von 129
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 38.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
VII.3. Relativistische Dynamik
Relativitätsprinzip ↔
Alle Naturgesetze sollen in allen translatorischen bewegten Inertialsystemen in
gleicher Formulierung gültig sein.
Wie müssen die Grundgesetze der Mechanik im allgemeinen relativistischen Fall
formuliert sein, damit sie gegenüber der Lorentz-Transformation invariant sind?
Newton's Bewegungsgleichung:
mit
ohne Beweis ergibt sich für den relativistischen Fall:
Unter Beachtung der "gewohnten" Schreibweise kann allerdings auch geschrieben
werden:
Hierbei ist m0 die Ruhemasse (d.h.
)
EP 1 - Skript
Masse des Teilchens steigt für v → c steil an!
Auch im relativistischen Fall wird die
kinetische Energie eines Teilchens als Beschleunigungsarbeit berechnet!
107 von 129
EP 1 - Skript
108 von 129
Nach den Regeln der Differenzialrechnung gilt:
bzw. unter Verwendung der relativistischen Masse m:
Integration liefert:
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 39.htm
Datei: 40.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
IX. Verformungen
IX.1. Erinnerung:
Mechanik fester Körper
EP 1 - Skript
109 von 129
: "Normalkraft":
Zugkraft
Druckkraft
: "Tangentialkraft"
: Normal-, Zug- und Druckspannung
: Tangential- oder Schubspannung
Insbesondere bei
Flüssigkeiten:
wird oft als "Druck" bezeichnet (dann p)
Maßeinheiten für
(p): "Pascal" (Pa)
"1 Pa ist gleich dem Druck, bei dem senkrecht auf die Fläche A=1m2 die Kraft F=1N
ausgeübt wird"
Weitere Maßeinheiten
(i)Physikalische Atmosphäre (atm);
1 atm = 1.013 • 105 Pa
(ii)technische Atmosphäre (at):
1 at = 1 kp/cm2 = 9.81 • 104 Pa
(iii)Das Bar (Meteorologie):
1 bar = 105 Pa = 1000 hPa
(iv)Das Torr (Vakuumtechnick):
1 Torr = 133.3 Pa
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 41.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
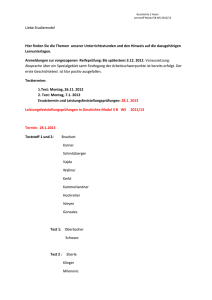
* Dehnung od. Stauchung:
EP 1 - Skript
110 von 129
"Hook'sches Gesetz":
E: "Elastizitätsmodul"
Mit Längenänderung ist auch Änderung der Querdimension verknüpft:
"Poisson'sches Gesetz"
μ: poisson'sche Zahl
* Scherung:
Tangentialspannung:
Scherungswinkel:
kleine Winkel
G: Scherungs-, Schub- oder Torsionsmodul
weiter gilt
* Kompression:
EP 1 - Skript
111 von 129
überall gleich -> V ändert sich um ΔV unter Beibehaltung der Form
K: Kompressionsmodul
"Kompressibilität"
Weiter gilt:
Konsequenzen für μ: 0 ≤ μ ≤ 0,5 ?
* Material mit μ = 0,5 <->
"inkompressibel"
Schliesslich ergibt sich für E, G:
<=> G < E
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 42.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
* Biegung:
* Funktion f(x) = y, der die neutrale Faser folgt:
EP 1 - Skript
112 von 129
für x=l <=> Auslenkung des freien Endes s=y(l)
* Torsion
Damit für die rücktr. Kraft (bzw. Drehmoment):
<=> Verhalten ähnlich Feder. Deswegen definiert man auch "Winkelrichtgröße"
<=> "Torsionspendel" zur Bestimmung von G
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 43.htm
Datei: 44.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
EP 1 - Skript
XI. Mechanik strömender Flüssigkeiten und Gase
Voraussetzungen für die nachfolgenden Betrachtungen:
- Im Medium können keinerlei Schubspannungen auftreten.
- Das Medium ist inkompressibel.
- Die betrachte Strömung ist stationär, d.h. die Geschwindigkeit eines betrachteten
Volumenelements hängt nur vom Ort, nicht aber von der Zeit ab.
Flüssigkeiten und Gase mit dem ersten beiden Eigenschaften nennt man "ideale
Flüssigkeiten".
Reale Flüssigkeiten: Der Übergang ideal - real wird wichtig mit wachsender
Strömungsgeschwindigkeit. Der Charakter der Strömung wird maßgeblich von den
oben angedeuteten Näherungen abweichen.
Oberhalb kritischer Geschwindigkeit:
laminar → turbolent (sehr kompliziert)
stationäre Strömung idealer Flüssigkeiten:
In idealen Flüssigkeiten sind Bahnlinie und Stromlinie identisch!
→ "Stromfaden"
→ "Stromröhre": Oberfläche des Stromfadens.
In stationären Strömungsfeldern tritt
keine Vermischung benachbarter Stromfäden auf.
Gesetzmäßigkeiten bei einer stationären Strömung in einer idealen Flüssigkeit:
113 von 129
EP 1 - Skript
Da keine Flüssigkeit aus einer Stromröhre austreten oder befließen kann, muss in
gleichen dt die gleiche Masse dm durch jeden Querschnitt A(s) strömen!
=> dm(s) = ρ(s) • A(s) • v(s) dt = ρ(0) • A(0) • v(0) dt
bzw.
ρ(s) • A(s) • v(s) = ρ(0) • A(0) • v(0)
=> mit Inkompressibilität (d.h. ρ(s) = ρ(0) für alle s)
A(s) • v(s) = A(0) • v(0) = const.
Kontinuitätsgleichung
Aussage: Strömungsgeschwindigkeit α 1 / A !!
kinetische Energie: Ek(s) = ½ dm • v²(s)
potenzielle Energie: Ep(s) = dm • g • h(s)
Gesamtenergie: Etot = Ek + Ep
Betrachte Energiedifferenz zwischen s = 0 und s:
114 von 129
EP 1 - Skript
Jede Energieänderung ΔE ist allgemein stets mit einer Differenz ΔWA der
geleisteten Arbeit verknüpft.
Die Arbeit W
A(s), die erforderlich ist, um das Flüssigkeitsvolumen dV = A(s) ds = A(s) • v(s) dt mit
der Druckluft F(s) = p(s) • A(s) durch den Querschnitt A(s) zu drücken, beträgt:
Die
Differenz der bei s = 0 und s verrichteten Arbeit ist dann:
A(s) folgt daraus sofort:
Man nennt
pD = ½ ρ v² den "hydrodynamischen" oder "Standdruck"
Für eine
ruhende Flüssigkeit (v = 0) folgt unmittelbar:
115 von 129
EP 1 - Skript
Der bei v = 0 herrschende Druck:
ist also der statische Druck!
Die Summe pG = p0 + pD heißt Gesamtdruck.
=>
pG = p0 + pD = const.!!
Da s = 0 ein willkürlich gewählter Punkt ist, folgt daraus, dass obige Gleichung für
alle s gelten muss!
116 von 129
EP 1 - Skript
117 von 129
Bernoulli
"Fließt das Wasser in denn Gulli, so fließt es immer nach Bernoulli."
Druckmessungen in Strömungen:
Druck: Kraft/Fläche ;
; z.B. U-Rohr-Manometer
strömende Flüssigkeiten und Gase:
=> Messung des statistischen Drucks p0 => Messung des Gesamtdrucks pG
Praktische Ausführung: "Prandt'sches Staurohr"
EP 1 - Skript
Wichtige Anwendung: Geschwindigkeitsmessung in (Klein-)Flugzeugen
Beispiele zur Anwendung der Bernoulli-Gleichung:
(1) Strömung einer idealen Flüssigkeit durch Verengungen:
Kontinuitätsgleichung:
Da das Rohr horizontal liegt:
statistischer Druck p1, p2 sind gegeben durch:
118 von 129
EP 1 - Skript
Da v1 < v2 => p2 - p1 > 0
Mit v2 = v1 • A1/A2 ergibt sich:
Falls ρ, A
1 und A2 bekannt sind, kann man aus (p2 - p1) die Strömungs - Geschwindigkeit v1
bestimmen! => "Venturi-Düse"
(2) Ausströmen einer idealen Flüssigkeit aus kleiner Öffnung (Raketen-Schub)
Falls die Strömung noch als stationär beschrieben werden kann, gilt:
119 von 129
EP 1 - Skript
120 von 129
Strömen zwei verschiedene Gase (mit ρ1, ρ2) bei derselben Druckdifferenz durch
eine Öffnung, so ergibt sich:
aus v
0 (*) kann man die Schubkraft FS berechnen!
Reibungskräfte in realen Flüssigkeiten:
Ideale Flüssigkeiten: keine Schubspannungen => Bewegung eines Flächenelements
in tangentialer Richtung erfordert keine Kraft!
In realen Flüssigkeiten treten jedoch Gegenkräfte auf!
Ursache: "benachbarte Schichten 'haften' aneinander"
=> Es entsteht ein Geschwindigkeitsgefälle v(y)!
Dabei ergibt sich:
Newton'sches Reibungsgesetz
η: Materialkonstante "Zähigkeit", "Viskosität"
[η] = [Pa • sec]
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 45.htm
EP 1 - Skript
121 von 129
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
--> F0 = F1 - F2 = A0 (p1 - p2 bzw. mit A0 = πR2
Dies gilt natürlich für jedes willkürlich herausgegriffene koaxiales Volumenelement
mit r < R und Länge l:
* Falls das Gewicht des Volumenelements vernachlässigt wird und keine
Beschleungigungen auftreten, so muss gelten
Gleichgewicht zwischen
und der Reibungskraft
* Reibungskraft FR zw. Flüssigkeiten und Rohr
mit Schubspannung
* Bei Gleichgewicht F = -FR muss also gelten
bzw.
EP 1 - Skript
122 von 129
* Radiale Geschwindigkeit ist Gefälle
Radiale Geschwindigkeit proportional zu r
* Die Abhängigkeit v(r) ergibt sich aus Integration
Annahme: v(R) = 0
dann ergibt sich c aus:
bzw.
parabolische
Geschwindigkeitsverteilung
Maximalgeschwindigkeit:
EP 1 - Skript
123 von 129
* Betrachte kreisförmiges Flächenelement dA = 2πr•dt
* Pro Zeitintervall dt strömt ein Flüssigkeitsvolumen dV durch diese Fläche
dV = dA•v(r)•dt
dV = 2πr dr dt v(r)
* Mit
"Stromstärke" -->
* Stromstärke i durch das Rohr wiederum Integration:
bzw.
Hagen-Poiseulle'sches Gesetz
* Falls Rohrströmung stationär
Volumen V, das in Zeitspanne t durch das Rohr fließt.
* Hagen-Poiseuill gilt, wenn Flüssigkeit an Rohr haftet (non-slip-boundary-condition)
* In der Realität meist erfüllt.
EP 1 - Skript
124 von 129
* Strömungswiderstand W:
(Stromstärke, v: mittlere
Geschw.)
* Umströmung einer Kugel durch eine reale Flüssigkeit:
* Reibungswiederstände W von Körpern, die sich in realer Flüßigkeit bewegen, bzw.
umströmt werden, hängen in komplizierter Art und Weise von der Gestalt des
Körpers ab.
Kugel mit Radius r:
* Kugel sinkt in Flüssigkeit <-> Kugel-Viskosimeter
FA + W = G' <-> Gleichgewicht
* Falls Gleichgewicht erreicht => v = const.
Mit
folgt:
bzw.
Wasser Glyzerin Luft Wasserstoff
* Die Viskosität
1.00•10-3 1.49 1.81•10-5 0.88•10-5 Pa•sec
ist deutlich von der Temperatur abhängig!
Beispiel: Wasser
T 0 20 50 °C
1.78•10-3 1.00•10-3 0.56•10-5 Pa•sec
EP 1 - Skript
125 von 129
* Flüssigkeiten:
* Gase:
fällt mit steigendem T
steigt mit T!
Noch ein Beispiel: * Sinkgeschwindigkeit eines Nebeltröpchens
fällt in Luft
mit der Geschwindigkeit
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 46.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
XI.2 Zirkulationsströmung
* Rotierender Körper in Flüssigkeit
--> Mitnahme angrenzender Flüssigkeitsschichten
--> "Zirkulationsströmung"
<-> geschlossene Stromlinien
* Betrachtungen ähnlich wie bei Strömung durch Rohr ergibt:
EP 1 - Skript
126 von 129
* Haftet die Flüssigkeit an der rotierenden Mantelfläche, so ist dort (R)
v(R) = ω • R = const/R
-> const. = ω R2 bzw.
* Das Linienintegral
entlang eines geschlossenen Weges heißt
"Zirkulation"
der Strömung.
Zirkulation eines rotierenden Zylinders
* Überlagerung von Zirkulationsströmung und homogener Strömung
| Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 47.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
EP 1 - Skript
127 von 129
* Bislang: Die die Strömung reibenden Kräfte werden von Reibungskräften FR
kompensiert.
* Falls dies nicht mehr der Fall ist, treten Beschleungigungen und damit
Trägheitskräfte FT auf!
Mit wachsendem Einfluss von FR schlägt jede Laminare Strömung bei einem
KritischenWert FT/FR in eine turbolente Strömung um!
<-->"verwirbelungen", nicht mehr stationäre Stromlinien
* Realität sehr kompliziert, aber ein Mass für den Übergang ist
Reynold'sche Zahl
* Wichtige Anwendung:
Reynold'sches Ähnlichkeitsgesetz
"Windkanal"
"Modellboote"
...
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>
Datei: 48.htm
Inhaltsverzeichnis | Seite drucken | << Zurück | Weiter >>
* Wird ein unsymmetrischer Körper umströmt, so führt die sich in seiner Umgebung
einstellende unsymmetrische Geschwindigkeitsverteilung zu einer unsymmetrischen
Druckverteilung. Diese kann eine resultierende Kraft zur Folge haben, die dann auf
den Körper wirkt.
* Betrachte Halbzylinder
Länge l, Radius r0
Wird umströmt mit v0
EP 1 - Skript
128 von 129
* Recht kompliziert, aber nachvollziebahre Rechnung (s. Lehrbuch) liefert:
* Qualitatives Verständnis allerding auch schon per Beroulli-Gleichung??
* Die gesamten Werte der bei einem speziellen Strömungsproblem kritischen
Reynold'schen Zahl ReK hängen in komplizierter Weise von Problemen ab und
müssen meist experiementell bestimmt werden!
Beispiel:
Für ein gegebenes Rohr findet man, abhängig von der
Einströmungsgeschwindigkeit, der Art der Flüssigkeit etc.:
1200 < ReK < 20000
=> aus dem unteren grenzwert ReK > 1200 folgt
(r = Rohrradius)
für Re < 1200 tritt laminare Strömung auf.
* Zum reinen Reibungswiderstand W, der proportional zu v ansteigt kommt bei
turbolenter Strömung noch der sogenannte Wirbel-oder Druckwiderstand Ww hinzu
Cw: Widerstandszahl, Widerstandsbeiwert
Cw ist von der Form des Körpers und Re abhängig!
EP 1 - Skript
129 von 129
Cw=
24
20
6
8
2
1
Relative cw-Werte für verschiedene Körper
(Änderungen von Re hier durch Änderung der Ausströmungsgeschwindigkeit v)
Inhaltsverzeichnis | Seite drucken | nach oben | << Zurück | Weiter >>