Workshop Geometrie mit Paket geom3dg von Maple Einführung
Werbung

Workshop Geometrie mit Paket geom3dg von Maple
CAS-Maple-Tagung, Westhochschule, 27.02.2007
Ernestina Dittrich, Universität Karlsruhe (TH), Abteilung für Didaktik der Mathematik
Einführung
Das Paket geom3d liefert über 140 Befehle zur Bearbeitung von Objekten der Analytischen
Geometrie im dreidimensionalen Raum.
Einige davon wollen wir auf einem Spaziergang durch eine Aufgabe kennen lernen.
Eine Übersicht findet man in der Hilfe unter geom3d
Maple-Befehle aus geom3d:
restart; with(geom3d):
Mit diesen Befehlen wird das System neu gestartet und alle Variablen zurückgesetzt. Das
Paket geom3d wird eingebunden.
Innerhalb von geom3d müssen zunächst alle Objekte (Punkte, Geraden, Ebenen, Kugeln)
vereinbart werden. Danach können die Objekte gezeichnet und mit ihnen gerechnet werden.
Vereinbahrung von Objekten
Punkte
point(A, 1,3,-2) ... legt den Punkt A(1|3|-2) fest.
coordinates(A) ... liefert die Koordinaten von A.
Geraden
line(g, [A,B]) ... legt die Gerade g = AB fest.
u:=[2,1,-3] ... legt den Vektor u fest.
line(h,[A,u])... legt die Gerade h mit den Aufpunkt A und dem Richtungsvektor u
fest.
Strecken, Dreieck
segment(AB,[A,B])... legt eine Streck AB mit den Endpunkten A und B fest.
triangle(T, [A, B, C])... legt ein Dreieck T mit den Eckpunkten A, B, C fest.
Ebenen
plane(E, [A,B,C]) ... legt die Ebene E durch drei Punkte A, B, C fest.
plane(F, [A,u]) ... legt die Ebene F durch den Punkt A und den (Normalen-)Vektor u
fest.
plane(H, [g,h]) ... legt die Ebene H durch zwei Geraden g und h fest. Liegen die
Geraden parallel oder schneiden sie sich, ist die Festlegung klar. Liegen die beiden
Geraden dagegen windschief, wird die Ebene so gelegt, dass sie g enthält und parallel zu
h ist.
--- ??? --- sowohl zur einen wie zur anderen Geraden parallel liegt und durch einen
weiteren festgelegten Punkt geht.--- ??? ---
plane(G, 2*x+y-3*z=4, [x,y,z]) ... legt eine Ebene G durch die Koordinatenform fest.
Kugeln
sphere(K, [A,3]) ... liefert die Kugel K mit dem Mittelpunkt A und den Radius 3.
sphere(K, [A,B,C,S]) ... liefert die Kugel K durch die Punkte A,B,C und S.
sphere(K, [A,B]) ... liefert die Kugel K mit dem Durchmesser A,B.
sphere(K1,x^2+y^2+z^2+x+y+z-3=0,[x,y,z],'centername'=M1) ... legt die Kugel K1
mit der angegebenen Gleichung fest und benennt den Mittelpunkt mit M1.
center(K); radius(K) ... liefert Mittelpunkt und Radius der Kugel K.
Zeichnen von Objekten
draw([A,g,E,K]) ...zeichnet den Punkt A, die Gerade g, die Ebene E und die Kugel K.
draw([E(color=blue),h(color=red),A(symbol=cross)],labels=[x,y,z],view=[-5..3,-2..1,
0..3]) ...zeichnet die Ebene E blau, die Gerade h rot, und den Punkt A als Kreuz; die
Achsen werden mit x,y,z bezeichnet und danach folgt der Zeichenbereich
In runden Klammern stehen die lokalen Optionen für das jeweilige Objekt, nach der
Liste der Optionen die, die global für die ganze Zeichnung gelten sollen.
Umgang mit Objekten
detail(C) ... gibt die Eigenschaften des geometrischen Objektes C an.
distance(A, E) ... liefert den Abstand von Punkt A und Ebene E.
intersection(S, g,E) ... liefert den Schnittpunkt S von der Geraden g und Ebene E.
FindAngle(g, E) ... liefert den Winkel zwischen g und E im Bogenmaß.
IsOnObject(A,g) ... prüft ob der Punkt A auf dem Objekt g liegt.
NormalVector(E) ...liefert den Normalenvektor der Ebenen E
Beispiel
Gegeben sind die Punkte A(1|1|5) und B(4|1|8) und die Ebene E: x-2y-3z = 0.
a) Untersuchen Sie, ob sich die Geraden g durch A und B und E schneiden.
b) Welchen Abstand hat der Punkt A von der Ebene E?
c) Wie groß ist der von der Ebene E und der Geraden g eingeschlossene Winkel?
d) Gib die Gleichung der Kugel K an um den Punkt A, die die Ebene E berührt.
c) Zeichne die Gerade, die Ebene und die Kugel.
Lösungen
> restart; with(geom3d):
Warning, the assigned name polar now has a global binding
Vereinbarung der Objekte
> point(A,1,1,5), point(B,4,1,8),
line(g,[A,B]),plane(E,1*x-2*y+2*z=0, [x,y,z]);
A , B , g, E
zu a) Gleichung von g und Schnittuntersuchung von E und g
> detail(g);
intersection(S, g,E);
coordinates(S);
Warning, assume that the parameter in the parametric equations is _t
Warning, assuming that the names of the axes are _x, _y, and _z
name of the object: g
form of the object: line3d
equation of the line: [_x = 1+3*_t, _y = 1, _z = 5+3*_t]
S
[ -2, 1, 2 ]
Hinweis: Die beiden warnings können unterdrückt werden, wenn vorneweg die
Maplevariablen, die den Parameternamen der Geradengleichung bzw. die Namen der
Achsen bezeichnen, gesetzt werde. Es sorgt
_EnvTName:=t;_EnvXName:=x;_EnvYName:=y; und _EnvZName:=z; nach dem Resart
dafür, dass die Standardbezeichnungen verwendet werden.
zu b) Abstand A von E
> distance(A, E);
3
zu c) Winkel zwischen g und E
> alpha:=FindAngle(g, E); alpha*180/Pi;
α :=
π
4
45
zu d) Die Kugel K hat den Radius 3 und den Mittelpunkt A
> sphere(K, [A,3]);
detail(K);
K
Warning, assume that the name of the axes are _x, _y and _z
name of the object: K
form of the object: sphere3d
name of the center: A
coordinates of the center: [1, 1, 5]
radius of the sphere: 3
surface area of the sphere: 36*Pi
volume of the sphere: 36*Pi
equation of the sphere: 18+_x^2+_y^2+_z^2-2*_x-2*_y-10*_z = 0
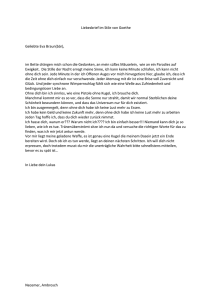
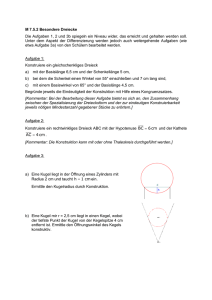
zu e) Zeichnen von g, E und K
> draw([g,E,K]);
Zeichne die Gerade rot, die Ebene blau, die Kugel grün, bezeichne die Achsen mit x,y,z
im Zeichenauschnitt [-5..5,-4..5,0..8]
> draw([E(color=blue),g(color=red),A(symbol=cross),K(
color=g
reen)],labels=[x,y,z],view=[-5..5,-4..5,0..8]);
Arbeitsblatt
Übungen zu geom3d
Gegeben ist eine dreiseitige Pyramide mit der Grundfläche ABC und der Spitze S.
A(5|0|0), B(2|6|1), C(1|2|0), S(3|1|5).
a) Zeichne die Eckpunkte in ein Koordinatensystem.
b) Zeichne ein Kantenmodell des Körpers.
c) Zeichne ein Flächenmodell des Körpers.
d) Vereinbare die Geraden g1 = AB, g2 = BC, g3 = CA,
g4 = AS, g5 = BS, g6 = CS und gib die Gleichung von g1 an.
e) Vereinbare die Ebenen E1 = ABC, E2 = ABS, E3 = BCS, E4 = CAS und gib die
Gleichung von E1 und E2 an.
f) Bestimme den Abstand des Punktes S vom Punkt A.
g) Bestimme den Abstand des Punktes S von der Ebene E1.
h) Bestimme den Abstand des Punktes B von der Geraden g3.
i) Bestimme den Abstand der windschiefen Geraden g2 und g4 und zeichne sie.
j) Bestimme den Winkel zwischen g2 und g4.
k) Bestimme den Winkel zwischen g2 und E4
l) Bestimme den Winkel zwischen E1 und E3.
m) Bestimme den Schnittpunkt S1 von g1 und g2 (S1 = B)
n) Bestimme den Schnittpunkt S2 von g4 und E1 (S2 = A)
o) Bestimme den Schnittpunkt S3 der Ebenen E1, E3 und E4 (S3 = C)
p) Bestimme die Schnittgerade h von E2 und E4 (h = g4)
q) Bestimme die Gleichung der Kugel K, die durch die Eckpunkte ABCS geht.
r) Bestimme den Mittelpunkt M der Kugel K.
s) Bestimme den Radius r der Kugel K.
t) Prüfe, ob A auf g1 liegt.
u) Prüfe, ob A auf E3 liegt.
v) Prüfe, ob A auf K liegt.
w) Gib die Eigenschaften des Punktes C an.
x) Gib die Eigenschaften der Geraden g3 an.
y) Gib die Eigenschaften der Ebene E3 an.
z) Gib die Eigenschaften der Kugel K an.
ä) Zeichne die Ebenen E1 und die Geraden g4, g5, g6.
ö) Zeichne die Kugel K und die Ebenen E1 und E2.
ü) Zeichne die Kugel K und die Geraden g1, g4 und g5.
Lösungen der Übungen
Bei manchen Eingaben schreiben wir nicht den üblichen Strichpunkt hinter eine Anweisung,
sondern ein Komma. Die Ausgabe erfolgt dann in einer Zeile, da es sich um eine Folge
handelt.
Wir starten das Paket geom3d und geben die Punkte ein.
> restart; with(geom3d):
Warning, the assigned name polar now has a global binding
> point(A, 5,0,0), point(B, 2,6,1), point(C, 1,2,0),
point(S, 3,1,5);
A, B, C, S
a) Zeichne die Eckpunkte in ein Koordinatensystem.
--> Zeichnen der Punkte mit draw .
5..6
> draw([A,B,C,S],symbol=circle,labels=[x,y,z],view=[,-5..6,-5..6]);
b) Zeichne ein Kantenmodell des Körpers.
--> Definition der Strecken mit segment und Zeichnen des Kantenmodells .
> segment(AB, [A,B]), segment(BC, [B,C]), segment(CA,
[C,A]),
segment(AS, [A,S]), segment(BS, [B,S]), segment(CS,
[C,S]);
> draw([AB,BC,CA,AS,BS,CS],labels=[x,y,z]);
AB, BC, CA, AS, BS, CS
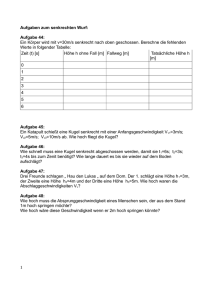
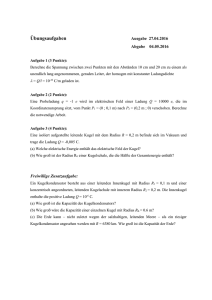
c) Zeichne ein Flächenmodell des Körpers.
--> Definition der Dreiecke mit triangle und Zeichnen des Flächenmodells.
> triangle(Dr1, [A,B,C]), triangle(Dr2, [A,B,S]),
triangle(Dr3, [B,C,S]), triangle(Dr4, [C,A,S]);
> draw({Dr1,Dr2,Dr3,Dr4});
Dr1, Dr2, Dr3, Dr4
d) Vereinbare die Geraden g1 = AB, g2 = BC, g3 = CA, g4 = AS, g5 = BS, g6 = CS
und gib die Gleichung von g1 an.
--> Aufstellung der Geraden mit line und Anzeigen ihrer Gleichungen mit detail.
> line(g1, [A,B]), line(g2, [B,C]), line(g3, [C,A]),
line(g4, [A,S]), line(g5, [B,S]), line(g6, [C,S]);
g1, g2, g3, g4, g5, g6
> detail([g1]);
Warning, assume that the parameter in the parametric equations is _t
Warning, assuming that the names of the axes are _x, _y, and _z
[ name of the object: g1
form of the object: line3d
equation of the line: [_x = 5-3*_t, _y = 6*_t, _z = _t]
]
Warning, assume that the parameter in the parametric equations is _t
Warning, assuming that the names of the axes are _x, _y, and _z
[ name of the object: g1
form of the object: line3d
equation of the line: [_x = 5-3*_t, _y = 6*_t, _z = _t]
]
e) Vereinbare die Ebenen E1 = ABC, E2 = ABS, E3 = BCS, E4 = CAS und gib die
Gleichung von E1 und E2 an.
--> Aufstellung der Ebenen mit plane und Anzeigen ihrer Gleichungen mit Equation.
> plane(E1, [A,B,C]), plane(E2, [A,B,S]),
plane(E3, [B,C,S]), plane(E4, [C,A,S]);
E1, E2, E3, E4
> detail([E1,E2]);
Warning, assuming that the names of the axes are _x, _y and _z
Warning, assuming that the names of the axes are _x, _y and _z
[ name of the object: E1
form of the object: plane3d
equation of the plane: 10-2*_x-4*_y+18*_z = 0
, name of the object: E2
form of the object: plane3d
equation of the plane: -145+29*_x+13*_y+9*_z = 0 ]
[ name of the object: E1
form of the object: plane3d
equation of the plane: 10-2*x-4*y+18*z = 0 , name of the object: E2
form of the object: plane3d
equation of the plane: -145+29*x+13*y+9*z = 0 ]
f) .. i) Abstände
f) Bestimme den Abstand des Punktes S vom Punkt A.
g) Bestimme den Abstand des Punktes S von der Ebene E1.
h) Bestimme den Abstand des Punktes B von der Geraden g3.
i) Bestimme den Abstand der windschiefen Geraden g2 und g4 und zeichne sie.
-->Abstände von Punkt-Punkt, Punkt-Ebene, Punkt-Gerade und Gerade-Gerade
erfolgt immer mit distance.
> distance(S,A);
30
> distance(S,E1);
45
86
86
> distance(B,g3);
86
5
5
distance(g2,g4);
draw([g2,g4], view=[-4..10,-10..10,-4..8]);
j) .. l) Winkel
j) Bestimme den Winkel zwischen g2 und g4.
k) Bestimme den Winkel zwischen g2 und E4
l) Bestimme den Winkel zwischen E1 und E3.
-->Winkel zwischen Gerade-Gerade, Gerade-Ebene und Ebene-Ebene erfolgt immer
mit FindAngle.
> alpha:=FindAngle(g2,g4); evalf(alpha*180/Pi);
7 2 30
α := arccos
180
72.46838277
> betha:=FindAngle(g2,E4); evalf(betha*180/Pi);
3 10
betha := arcsin
10
71.56505115
> delta:=FindAngle(E1,E3); evalf(delta*180/Pi);
16 86 59
δ := arccos
2537
63.30530997
m) .. p) Schnittpunnkte
m) Bestimme den Schnittpunkt S1 von g1 und g2 (S1 = B)
n) Bestimme den Schnittpunkt S2 von g4 und E1 (S2 = A)
o) Bestimme den Schnittpunkt S3 der Ebenen E1, E3 und E4 (S3 = C)
p) Bestimme die Schnittgerade h von E2 und E4 (h = g4)
--> Schnittpunkte und Schnittgeraden bestimmen mit intersection .
> intersection(S1, g1,g2); coordinates(S1); simplify(
%);
S1
[ 2, 6, 1 ]
[ 2, 6, 1 ]
> intersection(S2, g4,E1); coordinates(S2);
S2
[ 5, 0, 0 ]
> intersection(S3, E1,E3,E4); coordinates(S2);
S3
[ 5, 0, 0 ]
> intersection(h, E2,E4); detail(h);
h
Warning, assume that the parameter in the parametric equations is _t
Warning, assuming that the names of the axes are _x, _y, and _z
name of the object: h
form of the object: line3d
equation of the line: [_x = 5+180*_t, _y = -90*_t, _z = -450*_t]
q) .. s) Kugel
q) Bestimme die Gleichung der Kugel K, die durch die Eckpunkte ABCS geht.
r) Bestimme den Mittelpunkt M der Kugel K.
s) Bestimme den Radius r der Kugel K.
--> Kugel (sphere) mit Mittelpunkt (center) und Radius (radius) .
> sphere(K, [A,B,C,S]);
K
> M:=center(K); coordinates(M);
M := center_K_1
[ 4, 3, 2 ]
> radius(K);
14
t) .. v) Punkt auf Objekt?
t) Prüfe, ob A auf g1 liegt.
u) Prüfe, ob A auf E3 liegt.
v) Prüfe, ob A auf K liegt.
--> Punktprobe erfolgt über IsOnObject
> IsOnObject(A,g1);
true
> IsOnObject(A,E3);
false
> IsOnObject(A,K);
true
w) .. z) Eigenschaften
w) Gib die Eigenschaften des Punktes C an.
x) Gib die Eigenschaften der Geraden g3 an.
y) Gib die Eigenschaften der Ebene E3 an.
z) Gib die Eigenschaften der Kugel K an.
--> Eigenschaften geometrischer Objekte mit detail .
> detail(C);
name of the object: C
form of the object: point3d
coordinates of the point: [1, 2, 0]
> detail(g3);
Warning, assume that the parameter in the parametric equations is _t
Warning, assuming that the names of the axes are _x, _y, and _z
name of the object: g3
form of the object: line3d
equation of the line: [_x = 1+4*_t, _y = 2-2*_t, _z = 0]
> detail(E3);
Warning, assuming that the names of the axes are _x, _y and _z
name of the object: E3
form of the object: plane3d
equation of the plane: 15-21*_x+3*_y+9*_z = 0
detail(K);
Warning, assume that the name of the axes are _x, _y and _z
name of the object: K
form of the object: sphere3d
name of the center: center_K_1
coordinates of the center: [4, 3, 2]
radius of the sphere: 14^(1/2)
surface area of the sphere: 56*Pi
volume of the sphere: 56/3*Pi*14^(1/2)
equation of the sphere: _x^2+_y^2+_z^2+15-8*_x-6*_y-4*_z = 0
ä) .. ü) Zeichnen
ä) Zeichne die Ebenen E1 und die Geraden g4, g5, g6.
ö) Zeichne die Kugel K und die Ebenen E1 und E2.
ü) Zeichne die Kugel K und die Geraden g1, g4 und g5.
--> Zeichnungen von Objekten über draw.
> draw([E1,g4,g5,g6], view=[-2..10,-2..10,-4..8]);
> draw([K,E1,E2], view=[-2..10,-2..10,-4..8]);
> draw([K,g1,g4,g5], view=[-2..10,-2..10,-4..8]);
Abituraufgabe und Beispiele
Abitur 2005 II 1
Gegeben sind eine Pyramide ABCDS mit den Punkten A(0|0|0), B(8|0|0), C(8|8|0), D(0|8|0)
und S(4|4|8) sowie für jedes r ∈ R eine Ebene Er : rx+3z=8r
a) Stellen Sie die Pyramide in einem Koordinatensystem dar.
Die Ebene E2 enthält die Pyramidenkante BC und schneidet die Kante DS in F die Kante AS
in G. Geben Sie die Koordinaten der Punkte F und G an.
Zeichnen Sie das Viereck BCFG ein. Zeigen Sie, dass dieses Viereck ein gleichschenkliges
Trapez ist. Wie groß sind die Innenwinkel dieses Trapezes?
b) Bestimmen Sie r* so, dass die Pyramidenspitze S von der Ebene Er* den Abstand 4 hat.
Geben sie die Koordinaten desjenigen Punktes in dieser Ebene Er* an, der von S den
Abstand 4 hat.
Kugeln, Berührpunkt, Schnittkreis
Gegeben sind die Kugel KA mit dem Mittelpunkt A(-1|3|-2) und Radius 4 und die Kugel KB
um B(3|1|2) und den Radius 2.
a) Zeichnen Sie die beiden Kugeln. Zeigen Sie, dass sich die Kugeln berühren und
bestimmen Sie den Berührpunkt.
b) Ändern Sie den Radius der Kugel B so, dass die Kugel KA innerhalb der Kugel KB liegt.
Fertigen Sie eine geeignete Zeichnung an.
c) Ändern Sie den Radius der Kugel B so, dass die Kugel KA die Kugel KB schneidet.
Fertigen Sie eine geeignete Zeichnung an.
Bestimmen Sie den Radius und Mittelpunkt des Schnittkreises und fertigen Sie eine
geeignete Zeichnung an.
Lösungen Abituraufgaben und Beispiele
Abitur 2005 II 1
Teil a)
> restart;with(geom3d):
Warning, the assigned name polar now has a global binding
Eingabe der Objekte
> point(A,0,0,0);point(B,8,0,0);point(C,8,8,0);point(
D,
0,8,0);point(S,4,4,8);
A
B
C
D
S
> triangle(t1,[A,B,S]);triangle(t2,[B,C,S]);triangle(
t3
,[C,D,S]);triangle(t4,[A,D,S]);
t1
t2
t3
t4
> plane(E_ABCD,[A,B,C]);
E_ABCD
> draw([t1,t2,t3,t4,E_ABCD(color=blue)],thickness=3,l
ab
els=[x,y,z]);
> plane(E2,2*x+0*y+3*z=16,[x,y,z]);
E2
Zur Erinnerung: Die Ebene E2 enthält die Pyramidenkante BC und schneidet die
Kante DS in F die Kante AS in G. Geben Sie die Koordinaten der Punkte F und G
an.
> line(gDS,[D,S]);
gDS
> intersection(F,gDS,E2);
F
> detail(F);
name of the object: F
form of the object: point3d
coordinates of the point: [2, 6, 4]
> line(gAS,[A,S]);
gAS
> intersection(G,gAS,E2);
G
> detail(G);
name of the object: G
form of the object: point3d
coordinates of the point: [2, 2, 4]
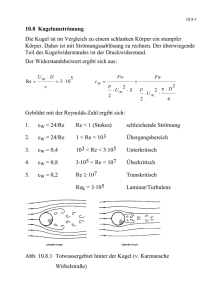
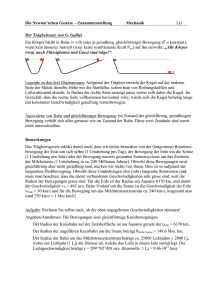
Zur Erinnerung: Zeichnen Sie das Viereck BCFG ein. Zeigen Sie, dass dieses
Viereck ein gleichschenkliges Trapez ist. Wie groß sind die Innenwinkel dieses
Trapezes?
Festlegen des Vierecks BCDG über die Seitenstrecken
> segment(BC,[B,C]),segment(CF,[C,F]),segment(FG,[F,G
])
, segment(GB,[G,B]);
BC, CF, FG, GB
> plane(E_BCFG, [G,C,F]);
E_BCFG
> draw([t1,t2,t3,t4,E_ABCD,BC(color=black),CF(color=b
la
ck),FG(color=black),GB(color=black)
],thickness=3,labels=[x,y,z]);
Zeige, dass das Trapez BCFG gleichschenklig ist über die Längen der Seiten
> distance(B,C),distance(C,F),distance(F,G),distance(
G,
B);
8, 2 14 , 4, 2 14
Damit ist BG=CF
Bestimme die Innenwinkel: Da das Trapez gleichschenklig, müssen nur zwei
Winkel bestimmt werden.
Zuerst müssen die Geraden BC, CF, FG vereinbart werden
> line(gBC,[B,C]);line(gCF,[C,F]);line(gFG,[F,G]);lin
e(
gGB,[G,B]);
gBC
gCF
gFG
gGB
> alpha:=FindAngle(gGB,gBC);alpha_gradmass:=evalf(alp
ha
*180/Pi);
delta:=FindAngle(gFG,gGB);delta_gradmass:=evalf(del
ta
*180/Pi);
14
α := arccos
14
alpha_gradmass := 74.49864043
14
δ := arccos
14
delta_gradmass := 74.49864043
Hier wird der Schnittwinkel delta bestimmt, der Innenwinkel ist aber größer als
90°, deshalb
> delta_innen:=180-delta_gradmass;
delta_innen := 105.5013596
Teil b)
b) Bestimmen Sie r* so, dass die Pyramidenspitze S von der Ebene Er* den Abstand
4 hat.
Geben sie die Koordinaten desjenigen Punktes in dieser Ebene Er* an, der von S
den Abstand 4 hat.
> plane(Er,r*x+3*z=8*r,[x,y,z]);
Er
> Abstand:=distance(S, Er);
Abstand :=
4 r − 24
r2 + 9
> r:=solve(Abstand=4,r);
r :=
9
4
Der Gesuchte Punkt P ist der Schnittpunkt von Er mit der Geraden gS, die durch S
geht und senkrecht auf Er steht
> nEr:=NormalVector(Er);
9
nEr := , 0, 3
4
> line(gS,[S,nEr]);
gS
> intersection(P, gS,Er);
P
> coordinates(P);
8
24
, 4,
5
5
Kugeln, Berührpunkt, Schnittkreis
Gegeben sind die Kugel KA mit dem Mittelpunkt A(-1|3|-2) und Radius 4 und die Kugel
KB um B(3|1|2) und den Radius 2.
a) Zeichnen Sie die beiden Kugeln. Zeigen Sie, dass sich die Kugeln berühren und
bestimmen Sie den Berührpunkt.
b) Ändern Sie den Radius der Kugel B so, dass die Kugel KA innerhalb der Kugel KB
liegt. Fertigen Sie eine geeignete Zeichnung an.
c) Ändern Sie den Radius der Kugel B so, dass die Kugel KA die Kugel KB schneidet.
Fertigen Sie eine geeignete Zeichnung an.
Bestimmen Sie den Radius und Mittelpunkt des Schnittkreises und fertigen Sie eine
geeignete Zeichnung an.
> restart;with(geom3d):
Warning, the assigned name polar now has a global binding
a) Vereinbarung der Objekte
> point(A,-1,3,-2);
point(B,3,1,2);
sphere(kugel_A,[A,4]); sphere(kugel_B,[B,2]);
A
B
kugel_A
kugel_B
Zeichnen der Kugeln
> draw([kugel_A(color=red), kugel_B(color=green)]);
Bestimmung des Berührpunktes
Gerade g durch die Mittelpunkte A und B schneidet die beiden Kugeln in dem
gemeinsamen Berührpunkt
> line(g,[A,B]);
g
> intersection(Ber_A,g,kugel_A);
intersection(Ber_B,g,kugel_B);
> detail(Ber_A);detail(Ber_B);
areinterls:
"two points of intersection"
areinterls:
"two points of intersection"
Ber_A
Ber_B
[ name of the object: g_intersect1_kugel_A
form of the object: point3d
coordinates of the point: [5/3, 5/3, 2/3]
, name of the object: g_intersect2_kug\
el_A
form of the object: point3d
coordinates of the point: [-11/3, 13/3, -14/3]
]
[ name of the object: g_intersect1_kugel_B
form of the object: point3d
coordinates of the point: [13/3, 1/3, 10/3]
, name of the object: g_intersect2_k\
ugel_B
form of the object: point3d
coordinates of the point: [5/3, 5/3, 2/3] ]
Der Berührpunkt hat die Koordinaten [5/3,5/3,2/3]
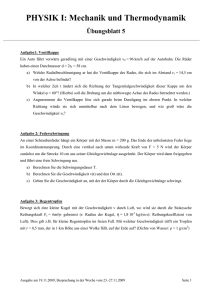
b) Radius KB vergrößern auf 10
> sphere(kugel_B,[B,10]);
kugel_B
> draw([kugel_A(color=red), kugel_B(color=green)]);
> draw([kugel_A(color=red),
kugel_B(color=green)],style=wireframe);
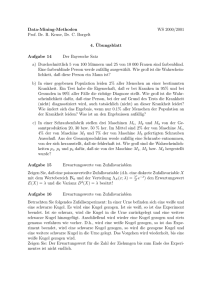
c) Die beiden Kugeln schneiden sich
> sphere(kugel_B,[B,7]);
kugel_B
> draw([kugel_A(color=red), kugel_B(color=green)]);
> intersection(schnitt,kugel_A,kugel_B); detail(schni
tt);
schnitt
Warning, assuming that the names of the axes are _x, _y and _z
name of the object: schnitt
form of the object: circle3d
name of the center: center_schnitt_1
coordinates of the center: [-5/6, 35/12, -11/6]
radius of the center: 1/4*255^(1/2)
the circle lies on the plane: p
, name of the object: p
form of the object: plane3d
equation of the plane: 33+8*_x-4*_y+8*_z = 0
> draw([kugel_A(color=red),
kugel_B(color=green),schnitt(color=blue,thickness=3
)],s
tyle=wireframe);
areinterls:
"two points of intersection"
>