Leseprobe - Hochschule
Werbung

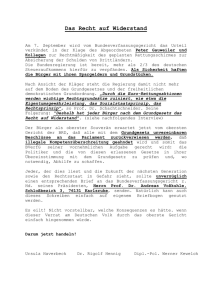
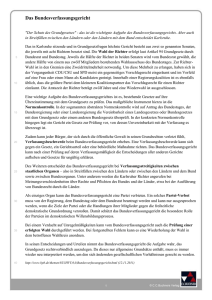
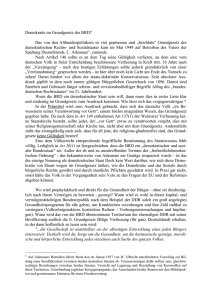
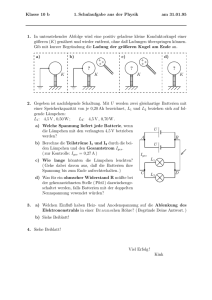
3 Kinetik des Massenpunktes Wechselwirkungen zwischen Bewegungs- und Kraftgrößen werden in der Kinetik auf der Grundlage des zweiten Axioms von Newton untersucht. In diesem Kapitel wird das Axiom auf diskrete Massenpunkte angewendet. Reale Körper werden mit einem Ersatzmodell behandelt, bei dem wir gedanklich die gesamte Masse in einem Punkt vereinigen. Eine solche Idealisierung ist dann zulässig, wenn Drehbewegungen, wie z.B. beim Àiegenden Golfball, nur geringen EinÀuss auf die Kinetik des Körpers haben. 3.1 Die drei Newtonschen Axiome der klassischen Mechanik Axiome sind nicht beweisbar, sondern werden aus Experimenten oder aus der Beobachtung und Analyse von Naturerscheinungen abgeleitet. Im Folgenden werden die Axiome von Newton zur Bewegung von materiellen Körpern zusammengefasst. Er hat sie im Jahre 1687 in der Arbeit Principia Mathematica Philosophia Naturalis (Die mathematischen Grundsätze der Naturphilosophie) veröffentlicht. Diese Gesetze bilden das Fundament der klassischen Mechanik und sind Grundlage von zahlreichen Berechnungen in der Technischen Mechanik.1 Am Anfang des Werkes formuliert Newton vier Begriffe, die sinngemäß wie folgt zusammengefasst werden können: 1. Die Masse m kennzeichnet die ,,Menge der Materie”. 2. Der Impuls p ist das Produkt von Masse und Geschwindigkeit: p = m · v. (3.1) 3. Die Trägheit kennzeichnet das Widerstandsvermögen einer Masse. Durch diese verharrt der Körper von sich aus in der geradlinigen, gleichförmigen Bewegung. Der Ruhezustand ist ein Sonderfall dieser Bewegung. 4. Eine Kraft F ist eine physikalische Größe, welche den Zustand eines Körpers der Ruhe oder der geradlinigen, gleichförmigen Bewegung zu ändern vermag. Unter Verwendung der vier Begriffe Masse, Impuls, Trägheit und Kraft hat Newton seine drei berühmten Axiome, das Trägheitsgesetz, das dynamische Grundgesetz und das Wechselwirkungsgesetz formuliert. In Abb. 3.1 sind diese zusammengefasst und werden mit den Wechselwirkungen zwischen Kräften und Bewegungen für Inline-Skater veranschaulicht. 1 Da die Newtonschen Axiome aus Weiterentwicklungen der modernen Physik ableitbar sind, werden sie heute nicht mehr unbedingt als Axiome angesehen. Um der historischen Bedeutung der Gesetze gerecht zu werden, werden wir im Folgenden dennoch die Bezeichnung Axiome verwenden. 70 3 Kinetik des Massenpunktes Die Newtonschen Axiome Abb. 3.1.a. Der Inline- Lex prima (Das Trägheitsgesetz): Jeder Körper verharrt im Zustand der Ruhe oder der gleichförmigen und geradlinigen Bewegung, solange er nicht durch äußere Kräfte gezwungen wird, seinen Zustand zu ändern. Skater würde mit unveränderter Geschwindigkeit geradlinig weiterrollen, wenn nicht äußere Kräfte, insbesondere Reibungskräfte, auf ihn einwirken würden. Lex secunda (Das dynamische Grundgesetz): Die zeitliche Änderung des Impulses ist gleich der aufgeprägten Kraft und hat die Richtung dieser Kraft. Abb. 3.1.b. Bei zeitlich konstanter Masse m gilt für die zeitliche Änderung des Impulses ṗ = mv̇ = ma. Für zwei Skater folgt bei gleicher Krafteinwirkung F = m1 a1 = m2 a2 . Der Skater mit kleinerer Masse m1 erfährt somit eine größere Beschleunigung als der Skater mit größerer Masse m2 . Lex tertia (Das Wechselwirkungsgesetz): Die wechselseitigen Beeinflussungen zweier Körper aufeinander sind immer gleich groß und entgegengesetzt (“actio est reactio”). Abb. 3.1.c. Wenn zwei Skater sich voneinander abstoßen, dann ist die Kraft, die von der linken Person auf die rechte Person ausgeübt wird, gleich der Kraft, welche die rechte Person auf die linke Person ausübt. Als Folge dieser Kraft bewegen sich beide Personen rückwärts. Abb. 3.1. Zusammenfassung und Erläuterung der Newtonschen Axiome Bemerkungen 3.1 1. Das erste Axiom wurde bereits von Galileo Galilei (1564-1642) in der Arbeit Discorsi e dimostrazione matematiche (1638) veröffentlicht. Obwohl es implizit im zweiten Axiom enthalten ist, wird es stets separat aufgeführt, da es wesentlich zur Abkehr von der bis dahin vorherrschenden Naturphilosophie von Aristoteles beitrug. 3.2 Das dynamische Grundgesetz für den Massenpunkt 71 2. Das dritte Axiom gilt für Nahkräfte (z.B bei Kontakt) und Fernkräfte (z.B. bei Gravitation). Für Nahkräfte kann dessen Aussage in der Statik aus dem Gleichgewichtsaxiom abgeleitet werden. Die Erweiterung auf Fernkräfte ist in der Tat axiomatisch, da sie nicht durch andere Axiome beweisbar ist. 3. Zwei weitere Axiome aus der Statik über Kräfte sind auch in der Kinetik gültig. Dieses sind das Parallelogrammaxiom (,,Zwei Kräfte werden vektoriell addiert”) und für starre Körper das Verschiebungsaxiom (,,Eine Kraft kann entlang ihrer Wirkungslinie verschoben werden”). Wie in der Statik ist auch das Eulersche Schnittprinzip anwendbar. 3.2 Das dynamische Grundgesetz für den Massenpunkt 3.2.1 Vektorielle Formulierung des dynamischen Grundgesetzes und Ersatzmodell Wir wenden uns der mathematischen Formulierung des zweiten Newtonschen Axioms in heutiger Vektornotation zu. Dazu wird vorab eine Vereinfachung eingeführt: Anstatt des realen Körpers in Abb. 3.2.a verwenden wir das Ersatzmodell in Abb. 3.2.b, bei dem wir uns die gesamte Masse m in einem Massenpunkt vereinigt denken. Wir wählen dazu den Massenmittelpunkt des realen Körpers, der für technische Körper genügend genau mit dem Schwerpunkt S zusammenfällt. Die an dem realen Körper wirkenden Kräfte F1 , F2 , .... Fn werden in dem Ersatzmodell ohne Berücksichtigung des wirklichen Angriffspunktes dem Masssenpunkt zugeordnet und durch einen resultierenden Kraftvektor FR ersetzt. Wir wenden jetzt das zweite Axiom von Newton auf den Massenpunkt an. Dazu wird in Erweiterung von De¿nition (3.1) der Impulsvektor p als Produkt von Masse m und Geschwindigkeitsvektor des Massenpunktes v eingeführt, und wir erhalten Abb. 3.2. Resultierende Kräfte und Bewegungen für a) den realen Körper, b) das Ersatzmodell mit Massenpunkt Das dynamische Grundgesetz für den Massenpunkt: Formulierung mit dem Impulsvektor 1. ṗ = FR , 2. p = mv n FR = Fi 3. wobei (3.2) Impulsvektor resultierender Kraftvektor. i=1 Mit der Produktregel erhält man für die Zeitableitung des Impulsvektors ṗ = ṁv + mv̇ = ṁv + ma. (3.3) 72 3 Kinetik des Massenpunktes Für zeitlich konstante Masse gilt ṁ = 0, und aus den Gleichungen (3.2) folgt Das dynamische Grundgesetz für den Massenpunkt: Formulierung mit dem Beschleunigungsvektor bei konstanter Masse 1. ma = FR , 2. a = v̇ = ẍ n Fi 3. FR = wobei (3.4) Beschleunigungsvektor resultierender Kraftvektor. i=1 Bemerkungen 3.2 1. Das dynamische Grundgesetz (3.4) - “Masse mal Beschleunigung gleich Summe aller Kräfte” - ist die Grundlage bei der Aufstellung von Bewegungs-Differenzialgleichungen (kurz: Bewegungsgleichungen) für zahlreiche Systeme der Technischen Mechanik. Der mathematische Zusammenhang F = ma zwischen einer Kraft F und einer Beschleunigung a wurde erstmals im Jahre 1752 von Euler in der Arbeit Entdeckung eines neuen Prinzipes der Mechanik und nicht von Newton selbst angegeben [29]. 2. Neben Länge und Zeit wird als dritte Grundgröße der Mechanik die träge Masse mit der Einheit Kilogramm (kg) eingeführt. Ein Kilogramm ist die träge Masse einer in Sèvres bei Paris aufbewahrten internationalen Standard-Masse aus Platin-Iridium, dem Urkilogramm [32]. Damit ergibt sich die Einheit einer Kraft, das Newton (N), aus dem dynamischen Grundgesetz (3.4.1) zu 1 N = 1 kg · 1 m/s2 = 1 kg m . s2 (3.5) Es gilt: Ein N ist die Kraft, die der Masse 1 kg die Beschleunigung 1 m/s2 erteilt. 3. Da m eine skalare Größe ist, folgt aus Gl.(3.4.1), dass der Beschleunigungsvektor a wie in Abb. 3.2 dargestellt dieselbe Richtung wie der Kraftvektor FR hat. 4. Bezugssysteme, in denen das dynamische Grundgesetz in der Form (3.2) bzw. (3.4) gilt, werden als Inertialsysteme bezeichnet. Aus der Erfahrung ist sofort einsehbar, dass für Inline-Skater in einem abbremsenden Zug oder auf einem Rondell andere physikalische Gesetzmäßigkeiten als in Abb. 3.1 gelten, so dass jene keine Inertialsysteme sind. In der Technik genügt es meist, das Bezugssystem mit einem Punkt der ErdoberÀäche fest zu verbinden. In Kapitel 8 wird das dynamische Grundgesetz auf Bezugssysteme erweitert, welche keine Inertialsysteme sind. 5. Für den realen Körper in Abb. 3.2.a ist zu erwarten, dass infolge der nicht im Schwerpunkt S angreifenden Kraft FR außer einer translatorischen Bewegung auch eine Verdrehung (oder: Rotation) entsteht. Die für das Ersatzmodell in Abb. 3.2.b verschobene Kraft in den Schwerpunkt hat in ihrer Wirkung auf den realen Körper dagegen nur eine translatorische Bewegung zur Folge. Damit gilt: Die Wechselwirkungen zwischen Kräften und Drehbewegungen eines realen Körpers werden mit dem dynamischen Grundgesetz für den Massenpunkt nicht erfasst. Dessen war sich auch Newton bewusst, als er in dem Vorwort zur Principia schrieb: ,,Wenn es doch gelingen würde, auch die anderen Naturphänomene durch Überlegungen gleicher Art aus mechanischen Prinzipien 3.2 Das dynamische Grundgesetz für den Massenpunkt 73 herzuleiten” (Zitat aus [29]). Wir verschieben diese Thematik auf die nachfolgenden Kapitel über Massenpunktsysteme und starre Körper und begründen dann auch die Wahl des Massenmittelpunktes bzw. des Schwerpunktes für das Ersatzmodell. 6. In der Mechanik unterscheidet man die träge Masse von der schweren Masse, die für den Anziehungseffekt verantwortlich ist. Dieser Effekt wurde erstmals von Newton mit dem Gravitationsgesetz berücksichtigt, siehe Abschnitt 3.3.8. Der damit verbundene experimentell bestätigte Unterschied beider Massen ist in der klassischen Mechanik unerklärt und wird erst in der allgemeinen Relativitätstheorie verstanden [32]. 7. Sind die Geschwindigkeiten in der Nähe der Lichtgeschwindigkeit c = 3 · 108 m/s, so müssen die Gesetze der Relativitätstheorie beachtet werden, die wesentlich von den Wissenschaftlern Lorents, Maxwell, Fitzgerald, Einstein geprägt wurden. Für Abmessungen eines Körpers im atomaren Bereich müssen die Gesetze der Quantenmechanik beachtet werden, die von den Wissenschaftlern Planck, Schrödinger, Dirac geprägt sind. In der Technischen Mechanik haben diese Aspekte jedoch keine Bedeutung. Zur Lösung von Aufgaben der Kinetik wird das dynamische Grundgesetz zweckmäßig mit verschiedenen Koordinaten aus Kapitel 2 formuliert. Dieses wird im Folgenden erläutert. 3.2.2 Das dynamische Grundgesetz in raumfesten kartesischen Koordinaten Zur Formulierung des dynamischen Grundgesetzes in kartesischen Koordinaten werden beide Seiten von Gl.(3.4.1) (gemäß De¿nition (A.12)) bezüglich der Basisvektoren eX , eY , eZ dargestellt. Die linke Seite von Gl.(3.4.1) erhalten wir durch Multiplikation des Beschleunigungsvektors in den Gleichungen (2.19.3) mit der Masse m ma = mẌeX + mŸ eY + mZ̈eZ . (3.6) Die rechte Seite von Gl.(3.4.1) folgt aus der Basisdarstellung Fi = FiX eX +FiY eY +FiZ eZ für die einzelnen Kraftvektoren und deren Summation zum resultierenden Kraftvektor n n n n Fi = FiX eX + FiY eY + FiZ eZ . (3.7) FR = n i=1 i=1 i=1 i=1 Dabei ist z.B. i=1 FiX die Summe aller am Massenpunkt angreifenden Kräfte in Richtung des Basisvektors eX . Durch Koef¿zientenvergleich von Gl.(3.6) mit Gl.(3.7) folgt aus dem dynamischen Grundgesetz (3.4.1) Das dynamische Grundgesetz für den Massenpunkt in raumfesten kartesischen Koordinaten 1. X : mẌ = ni=1 FiX 2. Y : mŸ = ni=1 FiY 3. Z : mZ̈ = ni=1 FiZ . (3.8) Dieses sind drei skalare Gleichungen, die für die drei Koordinatenrichtungen getrennt formuliert werden. 74 3 Kinetik des Massenpunktes 3.2.3 Lösungsschritte für Aufgaben der Kinetik In der Kinetik werden zwei Arten von Aufgaben unterschieden: 1. Bei bekannten Kräften wird nach dem Bewegungsablauf gefragt. 2. Bei bekanntem Bewegungsablauf wird nach den auftretenden Kräften gefragt. Die Vorhersage des Bewegungsablaufes eines Körpers im freien Fall oder beim schiefen Wurf sind Beispiele für den ersten Fall. Die Berechnung von Lagerkräften in rotierenden Systemen ist ein Beispiel für den zweiten Fall. In beiden Fällen kann nach den in Tabelle 3.1 zusammengefassten Schritten vorgegangen werden. 1. Idealisierung des realen Systems Hier wird das der Berechnung zu Grunde liegende mechanische System festgelegt. Dazu müssen der Schwerpunkt (und ggf. die Schwerpunktlinie) bekannt sein und die Lagerbedingungen (Gelenke, Einspannungen, Reibungslager) festgelegt werden. 2. Eintragen eines geeigneten Koordinatensystems Zur Auswahl stehen insbesondere die verschiedenen Koordinatensysteme aus Kapitel 2: Raumfeste kartesische Koordinaten, Zylinderkoordinaten, natürliche Koordinaten sowie mitrotierende kartesische Koordinaten. 3. Freischneiden Der Körper wird - in einer beliebigen, repräsentativen Lage - durch gedachte Schnitte von seinen Bindungen zu anderen Körpern oder Lagern gelöst. Anschließend werden die von anderen Körpern oder von AuÀagern zu übertragenden Kräfte als äußere Kräfte wirkend in den gedachten Schnitten eingetragen. 4. Formulierung des dynamischen Grundgesetzes in Koordinatenrichtungen Bezüglich der Vorzeichen gilt: Bewegungs- und Kraftgrößen sind in den skalaren Bewegungsgleichungen positiv, wenn die zugehörigen Vektoren in die Richtungen der Basisvektoren zeigen. Die Beschleunigungsterme sind in den Bewegungsgleichungen auf den Schwerpunkt S zu beziehen. 5. Bearbeitung zusätzlicher Aufgabenstellungen Wird bei bekannten Kräften nach dem Bewegungsablauf gefragt, so wird i.d.R. eine Integration der Bewegungsgleichungen unter Berücksichtigung der bekannten Anfangsbedingungen notwendig. Hierzu können die Lösungen der in Tabelle 2.1 zusammengestellten Grundaufgaben verwendet werden. Falls der Beschleunigungszustand bekannt ist, so können die auftretenen Kräfte, wie z.B. Auflagerreaktionen, berechnet werden. Ggf. muss bei bekanntem Orts- und Geschwindigkeitszustand der Beschleunigungszustand durch zeitliche Ableitung ermittelt werden. Tabelle 3.1. Lösungsschritte für Aufgaben der Kinetik mit dem dynamischen Grundgesetz 3.2 Das dynamische Grundgesetz für den Massenpunkt 75 Beispiel 3.1 Geschwindigkeitsmarken eines Flugzeuges beim Start In der Startphase eines Fluges sind verschiedene Geschwindigkeitsmarken von Bedeutung. Die wichtigste ist die Entscheidungsgeschwindigkeit V1 (,,take-off decision speed”), die vor jedem Flug unter Berücksichtigung der Landung und der meterologischen Bedingungen errechnet wird. Abb. 3.3. Geschwindigkeitsmarken eines Flugzeuges beim Start Während der Startphase wird das Erreichen von V1 vom Co-Piloten bekanntgegeben, so dass der Flugzeugführer zwischen Startfortsetzung und Startabbruch, z.B. wegen eines Triebwerkausfalls, entscheiden kann. Eine weitere Marke ist die Abhebegeschwindigkeit VLOF (,,lift-off speed”), bei der das Flugzeug abhebt. a) Zeigen Sie, dass die gegebene Schubkraft FS zum Erreichen von V1 innerhalb der Strecke S1 ausreichend ist. b) Welche Strecke SLOF wird beim Erreichen der Abhebegeschwindigkeit VLOF zurückgelegt? Bekannt: Masse m = 250 t, FS = 700 kN, S1 =1 km, V1 = 260 km/h, VLOF = 280 km/h. Hinweise: Auf Grund der geradlinigen, horizontalen Bewegung kann die Startphase mit einer Koordinate X beschrieben werden. Die Schubkraft FS wird dabei als konstant angenommen. Die Widerstandskräfte infolge Luftströmung, Reibungskräften am Fahrgestell sowie der Rollwiderstand bleiben unberücksichtigt. Vorüberlegungen: Es wird eine X-Koordinate in horizontaler Richtung eingeführt. Die Berechnungen erfolgen auf der Grundlage des dynamischen Grundgesetzes (3.8.1) in raumfesten kartesischen Koordinaten. Lösung: In dem Freischnitt in Abb. 3.3.b ist die in Bewegungsrichtung wirkende Schubkraft FS eingetragen. Das dynamische Grundgesetz (3.8.1) lautet Abb. 3.3.b. Flugzeug mit Schubkraft FS X: mẌ = FS . Da sich die Schubkraft FS mit dem Ort X nicht ändert, gilt die funktionale Abhängigkeit a(X) = Ẍ(X)= konst. Damit kann die Geschwindigkeit mit der fünften Grundaufgabe der 76 3 Kinetik des Massenpunktes Tabelle 2.1 bestimmt werden. Mit den Anfangsbedingungen v0 = 0, X0 = 0 ergibt sich X X FS FS 2 v(X) = v0 + 2 dX = 2 X. a(X)dX = 2 m m X0 0 Für den Teil a) der Aufgabenstellung folgt somit für X = S1 700 · 103 kg m2 v(X = S1 ) = 2 · 1000 = 74.8 m/s = 269.4 km/h > 260 km/h = V1 . 250 · 103 kg s2 Für Teil b) wird die Beziehung für v(X) nach der gesuchten Strecke X=SLOF aufgelöst: m 280 m 2 250 · 103 kg s2 2 SLOF = VLOF = 1080.2 m. = 2FS 3.6 s 2 · 700 · 103 kg m Beispiel 3.2 Flugbahn eines Golfballs Ein Golfball der Masse m wird an der ErdoberÀäche unter einem Winkel α0 abgeschlagen. Bezogen auf das in Abb. 3.4 eingetragene Koordinatensystem bestimme man a) die Bahnkurve Z(X), b) die Steigzeit tS der Steighöhe h, c) die zu tS gehörige Steighöhe, d) den Abschlagwinkel αH 0 für die maximal mögliche Steighöhe H, e) die Flugdauer tF , f) die zu tF gehörige Wurfweite l, g) den Abschlagwinkel αL 0 für die maximale Wurfweite L. Abb. 3.4. Flugbahn eines Golfballs Vorüberlegungen: Die Berechnung erfolgt mit den Gleichungen (3.8) für das dynamische Grundgesetz in raumfesten kartesischen Koordinaten. Obwohl die Bewegung in der X, ZEbene auftritt, werden zur vollständigen Beschreibung der Flugbahn die Bewegungsgleichungen für alle drei Koordinatenrichungen formuliert. Lösung: In einer beliebigen Lage des Golfballs wird in Abb. 3.4 die nach unten wirkende Gewichtskraft mg entgegen der Z-Richtung eingetragen. Aus (3.8) folgt dann X : mẌ = 0, Y : mŸ = 0, Z : mZ̈ = −mg. Wir teilen alle drei Gleichungen durch m und führen jeweils eine zweifache Integration durch: Ẍ = 0 Ÿ = 0 Z̈ = −g =⇒ =⇒ =⇒ Ẋ = C1 Ẏ = C3 Ż = −gt + C5 =⇒ =⇒ =⇒ X = C1 t + C 2 Y = C3 t + C 4 Z = − 21 gt2 + C5 t + C6 . 3.2 Das dynamische Grundgesetz für den Massenpunkt 77 Die Bestimmung der Konstanten C1 bis C6 geschieht für alle drei Koordinatenrichtungen unter Verwendung von Anfangsbedingungen für den Ort und die Geschwindigkeit X(t = 0) = 0 = C2 , Y (t = 0) = 0 = C4 , Z(t = 0) = 0 = C6 , Ẋ(t = 0) = v0 cos α0 = C1 , Ẏ (t = 0) = 0 = C3 , Ż(t = 0) = v0 sin α0 = C5 . Damit können die Koordinaten in Abhängigkeit der Zeit angegeben werden X(t) = v0 cos α0 t, Y (t) = 0, Z(t) = v0 sin α0 t − 12 gt2 , womit auch formal bestätigt ist, dass in Y -Richtung keine Bewegung auftritt. a) Zur Ermittlung der Bahnkurve Z(X) wird die Zeit t aus den Beziehungen für X(t) und Z(t) eliminiert t= X v0 cos α0 =⇒ Z(X) = X tan α0 − X 2 g . 2v02 cos2 α0 (3.9) Damit beschreibt der Golfball eine Parabel (Wurfparabel). b) Die Steigzeit tS wird aus der Bedingung Ż = 0 bestimmt, d.h. Ż = v0 sin α0 − gt = 0 =⇒ tS = v0 sin α0 . g c) Die zu tS gehörige Steighöhe h erhalten wir aus der oberen Beziehung für Z(t): h = Z(tS ) = v0 sin α0 v0 sin α0 1 v02 sin2 α0 1 v02 sin2 α0 = − g . g 2 g2 2 g d) Der Abschlagwinkel αH 0 für die maximal mögliche Steighöhe H folgt aus der Bedingung d Z(tS ) 1 π 1 v02 1 v02 = v02 2 sin α0 cos α0 = 0 =⇒ αH =⇒ H = sin2 αH . 0 = 0 = dα0 2g 2 2 g 2 g e) Die Flugdauer tF folgt aus der Bedingung 1 2 Z(tF ) = tF v0 sin α0 − gtF = 0 =⇒ tF = v0 sin α0 . 2 g f) Die zu tF gehörige Wurfweite l erhalten wir aus der oberen Beziehung für X(t): v2 2 l = X(tF ) = v0 cos α0 tF = v0 cos α0 v0 sin α0 = 0 sin 2α0 = X(α0 ). g g g) Der Abschlagwinkel αL 0 für die maximale Wurfweite L folgt aus der Bedingung π v2 d X(α0 ) v0 π π L = 2 cos(2α0 ) = 0 =⇒ 2αL = = =⇒ α =⇒ L = X = 0. 0 0 dα0 g 2 4 4 g 78 3 Kinetik des Massenpunktes 3.2.4 Geführte Bewegungen Bewegt sich ein Körper auf einer vorgegebenen Fläche (Freiheitsgrad f =2) oder Kurve (f =1), spricht man von einer geführten Bewegung. In Abb. 3.5.a bewegt sich die Kugel auf dem Billiardtisch, solange sie nicht den Tischrand berührt, in zwei voneinander unabhängigen Richtungen, und hat somit den Freiheitsgrad f =2. Die Bewegungsbehinderung in vertikaler Richtung bewirkt eine vertikale Reaktionskraft. Abb. 3.5.b zeigt eine Magnetschwebebahn in einer Kurvenfahrt. Die Bewegung ist kinematisch an den vorgegebenen Bahnverlauf gebunden, so dass für den Freiheitsgrad f =1 gilt. Dabei entstehen Trag- und Führungskräfte senkrecht zur Bahn. Da wegen der Eigenschaft (2.16.1) die Geschwindigkeit v tangential zur Bahn verläuft, sind diese Reaktionskräfte auch stets senkrecht zur Geschwindigkeit. Abb. 3.5. Beispiele für geführte Bewegungen: a) Kugel auf Billiardtisch b) Magnetschwebebahn in einer Kurve mit Tragkraft FT und Führungskraft FF senkrecht zur Geschwindigkeit v Wir wollen hier auf eine allgemeine Darstellung von geführten Bewegungen im Raum (z.B. unter Verwendung Gaußscher Flächenparameter) verzichten und uns stattdessen auf folgende Bemerkungen beschränken: Bemerkungen 3.3 1. Geführte Bewegungen eines Körpers rufen im Allgemeinen Reaktionskräfte hervor. Ist die Bewegung im Raum kinematisch an eine Fläche gebunden (f = 2), so tritt eine Reaktionskraft senkrecht zu dieser Fläche auf. Bei einer Bewegung entlang einer Bahn im Raum (f = 1) treten zwei unabhängige Kräfte in einer Ebene senkrecht zur Bahn auf. 2. Reaktionskräfte werden mit dem aus der Statik bekannten Schnittprinzip sichtbar gemacht und sind somit der Berechnung mit dem dynamischen Grundgesetz zugänglich. 3. Die Bindung der Bewegung an eine Fläche wird mit dem dynamischen Grundgesetz durch zwei skalare Gleichungen beschrieben, die im Allgemeinen miteinander gekoppelt sind. Bewegungen auf einer Bahn können durch eine skalare Gleichung beschrieben werden. 4. Raumfeste kartesische Koordinaten sind in vielen Fällen nicht zur Berechnung von geführten Bewegungen mit dem dynamischen Grundgesetz geeignet. Häu¿g wird durch Einführung anderer Koordinatensysteme eine Formulierung des dynamischen Grundgesetzes gefunden, die mathematisch einfacher zu behandeln ist. Dazu wird im Folgenden das dynamische Grundgesetz in Zylinderkoordinaten, natürlichen Koordinaten und mitrotierenden kartesischen Koordinaten formuliert. 3.2 Das dynamische Grundgesetz für den Massenpunkt 79 3.2.5 Das dynamische Grundgesetz in Zylinderkoordinaten Zur Formulierung des dynamischen Grundgesetzes in Zylinderkoordinaten werden beide Seiten von Gl.(3.4.1) (gemäß De¿nition (A.12)) bezüglich der Basisvektoren er , eϕ , ez dargestellt. Die linke Seite von Gl.(3.4.1) erhalten wir durch Multiplikation des Beschleunigungsvektors in den Gleichungen (2.25.3) mit der Masse m ma = m(r̈ − r ϕ̇2 )er + m(2ṙ ϕ̇ + r ϕ̈)eϕ + mz̈ez . (3.10) Die rechte Seite von Gl.(3.4.1) folgt aus der Basisdarstellung Fi = Fir er + Fiϕ eϕ + Fiz ez für die einzelnen Kraftvektoren und deren Summation zum resultierenden Kraftvektor n n n n FR = Fi = Fir er + Fiϕ eϕ + Fiz ez . (3.11) i=1 i=1 i=1 i=1 n Dabei ist z.B. i=1 Fir die Summe aller am Massenpunkt angreifenden äußeren Kräfte in Richtung des Basisvektors er . Durch Koef¿zientenvergleich von Gl.(3.10) mit Gl.(3.11) folgt aus dem dynamischen Grundgesetz (3.4.1) Das dynamische Grundgesetz für den Massenpunkt in Zylinderkoordinaten n 1. r : m(r̈ − r ϕ̇2 ) = i=1 Fir n 2. ϕ : m(2ṙ ϕ̇ + r ϕ̈) = i=1 Fiϕ 3. z : mz̈ = ni=1 Fiz . (3.12) Beispiel 3.3 Mathematisches Pendel Eine Kugel der Masse m hängt an einem masselosen Seil der Länge l. Sie wird in einer Anfangslage zur Zeit t = 0 mit dem Winkel ϕ(t = 0) = ϕ0 losgelassen und schwingt anschließend in einer Ebene im Schwerefeld der Erde. Gesucht ist die Bewegungsgleichung für den Winkel ϕ(t) bei Beschränkung auf kleine Auslenkungen. Bemerkung: Ein Körper, der als idealisierter Massenpunkt um einen festen Punkt schwingt, wird als mathematisches Pendel bezeichnet. Vorüberlegungen: Die Kugel beschreibt eine geführte Bewegung auf einer Kreisbahn, die zweckmäßig mit Zylinderkoordinaten (bzw. Polarkoordinaten) r, ϕ beschrieben wird. Die Seilkraft wird durch Freischneiden der Punktmasse sichtbar gemacht. Unter Berücksichtigung der Gewichtskraft im Freischnitt wird das dynamische Grundgesetz mit den Gleichungen (3.12) formuliert. Abb. 3.6. Mathematisches Pendel 80 3 Kinetik des Massenpunktes Lösung: Da die Länge des Seiles l sich während der Bewegung nicht ändert, kann die Lage des Massenpunktes in jedem Augenblick mit dem von der statischen Ruhelage aus zählenden Winkel ϕ angegeben werden. Im Freischnitt werden alle an der Kugel angreifenden Kräfte eingetragen. Dabei kennzeichnen FS die Seilkraft und mg die senkrecht nach unten wirkende Gewichtskraft. Aus den Gleichungen (3.12.1) und (3.12.2) folgt r: m(r̈ − r ϕ̇2 ) = −mlϕ̇2 = mg cos ϕ − FS ϕ: m(2ṙ ϕ̇ + r ϕ̈) = mlϕ̈ Abb. 3.6.b. Freischnitt, Basisvektoren und Kräfte = −mg sin ϕ. Hierbei wurde ṙ = 0 berücksichtigt, da die Bewegung auf der Kreisbahn mit konstantem Radius r = l verläuft. Es stehen also zwei Differenzialgleichungen für die beiden Unbekannten ϕ und FS zur Verfügung. Da in der zweiten Gleichung nur die Unbekannte ϕ auftritt, ist deren Lösung zur Beschreibung des Bewegungsablaufes ausreichend. Teilt man diese Gleichung durch ml und bringt alle Terme auf die linke Seite so folgt g ϕ̈ + sin ϕ = 0. l Damit erhält man eine nichtlineare Differenzialgleichung auf deren Lösung hier nicht eingegangen werden soll. Bei Beschränkung auf kleine Winkel gilt ϕ ≈ sin ϕ 2 , und es folgt die lineare Differenzialgleichung g ϕ̈ + ϕ = 0. l Wie man einfach nachprüfen kann, wird diese Differenzialgleichung von dem Ansatz ϕ(t) = A sin(ωt) + B cos(ωt), ω = g/l erfüllt. Die Bestimmung der Konstanten A und B geschieht unter Berücksichtigung von Anfangsbedingungen für den Verdrehwinkel und die Winkelgeschwindigkeit zur Zeit t = 0: ϕ(t = 0) = ϕ0 ϕ̇(t = 0) = 0 =⇒ =⇒ B = ϕ0 , A = 0. ϕ (t) ϕ0 Damit lautet die Bewegungsgleichung ϕ(t) = ϕ0 cos(ωt). t T= 2π/ω Abb. 3.6.c. Winkel als Funktion der Zeit Der Schwingungsvorgang wird also für kleine Auslenkungen, wie in Abb. 3.6.c dargestellt und wie bereits in Beispiel 2.2 behandelt, durch eine harmonische Funktion mit der Schwingungsdauer T = 2π/ω beschrieben. 2 Man überprüfe diese Näherung z.B. für den Winkel ϕ = 0.001234 rad mit einem Taschenrechner. 3.2 Das dynamische Grundgesetz für den Massenpunkt 81 Beispiel 3.4 Stein in der Erdumlaufbahn Ein Stein wird von einer Bergspitze horizontal abgeworfen. Welche Geschwindigkeit müßte er haben, damit er unter dem EinÀuss der Gewichtskraft nicht den Erdboden berührt und an den Abwurfort zurückkehrt? Hinweise: Die Bergspitze wird im Abstand RE = 6370 km vom Erdmittelpunkt angenommen. Die Erde kann als kugelförmig angesehen werden, so dass der Bahnverlauf näherungsweise kreisförmig ist. Widerstände jeglicher Art werden vernachlässigt. Abb. 3.7. Stein in der Erdumlaufbahn Vorüberlegung: Für die kreisförmige Bewegung wird das dynamische Grundgesetz zweckmäßig mit den Gleichungen (3.12) für Zylinderkoordinaten formuliert. Da Widerstandskräfte vernachlässigt werden, ist nur die Gewichtskraft mg als Kraftwirkung zu berücksichtigen. Lösung: Aus den Gleichungen (3.12.1) und (3.12.2) in Zylinderkoordinaten folgen die Bewegungsgleichungen: r : m (−r ϕ̇2 ) = −mg ϕ : m r ϕ̈ = 0. Gl.(3.12.3) ist wegen z̈ = 0 trivial erfüllt. Mit dem konstanten Radius r = RE erhält man aus der ersten Bewegungsgleichung g 2 RE ϕ̇ = g =⇒ ϕ̇ = . RE Damit ist die Winkelgeschwindigkeit konstant, was im Einklang mit der zweiten Bewegungsgleichung steht. Die Geschwindigkeit des Steines wird schließlich mit Gl.(2.28.1) berechnet: g km m = RE g = 7900 = 23700 . v = r ϕ̇ = RE ϕ̇ = RE RE s h Bemerkung: Über die ¿ktive Bewegung in dieser Aufgabenstellung schreibt Newton selbst (Zitat aus [29], S. 270): “Dass durch die Zentralkräfte die Planeten in ihren Bahnen gehalten werden können, ersieht man aus der Bewegung der Wurfgeschosse. Ein (horizontal) geworfener Stein wird, da auf ihn die Schwere wirkt, vom geraden Wege abgelenkt und fällt, indem er eine krumme Linie beschreibt, zuletzt zur Erde. Wird er mit größerer Geschwindigkeit geworfen, so fliegt er weiter fort, und so könnte es geschehen, dass er zuletzt über die Grenzen der Erde hinausflöge und nicht mehr zurückfiele. So würden die von einer Bergspitze mit steigender Geschwindigkeit fortgeworfenen Steine immer weitere Parabelbögen beschreiben und zum Schluß - bei einer bestimmten Geschwindigkeit - zur Bergspitze zurückkehren und auf diese Weise sich um die Erde bewegen.” 82 3 Kinetik des Massenpunktes 3.2.6 Das dynamische Grundgesetz in natürlichen Koordinaten Zur Formulierung des dynamischen Grundgesetzes in natürlichen Koordinaten werden beide Seiten von Gl.(3.4.1) (gemäß De¿nition (A.12)) bezüglich der Basisvektoren et , en , eb dargestellt. Die linke Seite von Gl.(3.4.1) erhalten wir durch Multiplikation des Beschleunigungsvektors in den Gleichungen (2.36.3) mit der Masse m ma = mv̇et + m v2 en . ρ (3.13) Die rechte Seite von Gl.(3.4.1) folgt aus der Basisdarstellung Fi = Fit et + Fin en + Fib eb für die einzelnen Kraftvektoren und deren Summation zum resultierenden Kraftvektor n n n n Fi = Fit et + Fin en + Fib eb . (3.14) FR = i=1 i=1 i=1 i=1 n Dabei ist z.B. i=1 Fit die Summe aller am Massenpunkt angreifenden Kräfte in Richtung des Basisvektors et . Durch Koef¿zientenvergleich von Gl.(3.13) mit Gl.(3.14) folgt aus dem dynamischen Grundgesetz (3.4.1) Das dynamische Grundgesetz für den Massenpunkt in natürlichen Koordinaten n 1. t : mv̇ = i=1 Fit 2 v 2. n : m = ni=1 Fin ρ 3. b : 0 = ni=1 Fib . (3.15) Im Gegensatz zu den Gleichungen (3.8) für raumfeste kartesische Koordinaten und (3.12) für Zylinderkoordinaten gibt es bei natürlichen Koordinaten immer eine Koordinatenrichtung, die in der Streckebene liegende Richtung von eb , in der die Summe aller Kräfte zu Null wird. In dieser Richtung liegt somit statisches Gleichgewicht vor. Beispiel 3.5 Magnetschwebebahn in einer Kurve Die Magnetschwebebahn in Beispiel 2.13 fährt wie in Abb. 3.8 dargestellt auf einer Spurebene mit der Neigung β. Das Trag- und Führsystem der Bahn arbeitet nach einem elektromagnetischen Schwebeprinzip, so dass die Bewegung berührungslos erfolgt. Wie groß sind die Tragkraft FT normal zur Spur und die Führungskraft FF tangential zur Spur für den unteren Tragmagneten und den seitlichen Führmagneten? Bekannt: v = 200 km/h, X0 = −300 m, Y = bX 2 , b = 0.001 m−1 , Masse der Magnetbahn m = 10 t, β = 10o . 3.2 Das dynamische Grundgesetz für den Massenpunkt 83 Abb. 3.8. Magnetschwebebahn in einer Kurve: Bahnverlauf auf Parabel, Trag- und Führungskraft Vorüberlegungen: Es handelt sich um eine geführte Bewegung, bei der die Tragkraft FT und die Führungskraft FF stets senkrecht zum Bahnverlauf gerichtet sind. Zweckmäßig werden natürliche Koordinaten verwendet, so dass mit dem Ergebnis für den momentanen Krümmungsradius ρ aus Beispiel 2.13 die gesuchten Kräfte mit dem dynamischen Grundgesetz in den Gleichungen (3.15) berechnet werden können. Lösung: In Abb. 3.8.b sind die Basisvektoren et , en , eb eingetragen. (Man beachte, dass en in der horizontalen X, Y -Ebene und nicht in der Spurebene der Bahn liegt!) In Abb. 3.8.b erfolgt außerdem die Zerlegung von FT und FF in die Koordinatenrichtungen. Die Bewegungsgleichungen (3.15) lauten t : mv̇ = n i=1 Fit = 0 v 2 n = i=1 Fin = FT sin β + FF cos β ρ b: 0 = ni=1 Fib = mg + FF sin β − FT cos β. n: m Die erste Gleichung bestätigt, dass Reaktionskräfte keinen EinÀuss auf eine geführte Bewegung tangential zur Bahn haben. Ohne Einwirkung tangentialer Kräfte bleibt die Geschwindigkeit somit konstant. Nach AuÀösung der letzten beiden Gleichungen erhält man mit dem Ergebnis ρ = 793 m aus Beispiel 2.13 für die zwei gesuchten Kräfte FT und FF v2 sin β + mg cos β = 105.24 kN ρ v2 FF = m cos β − mg sin β = 20.97 kN. ρ FT = m et Bahn en Lokaler Krümmungsradius parallel zur XY-Ebene mg FF sinβ FF eb en FF cos β FT F cos β T FT sin β Abb. 3.8.b. Draufsicht und Querschnitt mit Basisvektoren und Kräften 84 3 Kinetik des Massenpunktes 3.2.7 Das dynamische Grundgesetz in mitrotierenden kartesischen Koordinaten Für Kreisbewegungen um eine feste Achse werden zur Formulierung des dynamischen Grundgesetzes in mitrotierenden kartesischen Koordinaten beide Seiten von Gl.(3.4.1) (gemäß De¿nition (A.12)) bezüglich der Basisvektoren ex , ey , ez dargestellt. Dazu multiplizieren wir den Beschleunigungsvektor in den Gleichungen (2.42.3) mit der Masse m ma = m(−y ω̇ − xω 2 )ex + m(xω̇ − yω 2 )ey + 0ez . (3.16) Die Basisdarstellung Fi = Fix ex + Fiy ey + Fiz ez für die einzelnen Kraftvektoren liefert nach Summation den resultierenden Kraftvektor n n n n Fi = Fix ex + Fiy ex + Fiz ez . (3.17) FR = n i=1 i=1 i=1 i=1 Dabei ist z.B. i=1 Fix die Summe aller am Massenpunkt angreifenden äußeren Kräfte in Richtung des Basisvektors ex . Durch Koef¿zientenvergleich von Gl.(3.16) mit Gl.(3.17) folgt aus dem dynamischen Grundgesetz (3.4.1) Das dynamische Grundgesetz für Kreisbewegungen des Massenpunktes in mitrotierenden kartesischen Koordinaten 1. x : m(−y ω̇ − xω 2 ) = ni=1 Fix 2. y : m(xω̇ − yω 2 ) = ni=1 Fiy 3. z : 0 = ni=1 Fiz . (3.18) Beispiel 3.6 Mathematisches Pendel Man löse die Aufgabenstellung für das mathematische Pendel in Beispiel 3.3 mit mitrotierenden kartesischen Koordinaten. Vorüberlegungen: Das Koordinatensystem x, y, z wird mit dem Seil körperfest verbunden, so dass für die Koordinaten der Masse gilt x = l und y = z = 0. Nach Freischneiden der Masse von dem Seil werden unter Berücksichtigung der Seilkraft FS und der Gewichtskraft mg für das ebene Problem die Bewegungsgleichungen (3.18.1) und (3.18.2) formuliert. Lösung: Aus Gl.(3.18.1) und Gl.(3.18.2) folgt x: m(−y ω̇ − xω 2 ) = m(−lω 2 ) = mg cos ϕ − FS y: m(xω̇ − yω 2 ) = mlω̇ = −mg sin ϕ. Abb. 3.9. Mathematisches Pendel, Freischnitt und angreifende Kräfte Beide Gleichungen sind wegen ω = ϕ̇ identisch zu den Bewegungsgleichungen in Beispiel 3.3, so dass die weiteren Schritte wie dort angegeben durchgeführt werden können. 3.2 Das dynamische Grundgesetz für den Massenpunkt 85 3.2.8 Zusammenfassung zu den verschiedenen Koordinatensystemen Abb. 3.10 veranschaulicht das dynamische Grundgesetz F = ma für verschiedene Koordinatensysteme in der Ebene. Dargestellt sind die Fälle a) raumfeste kartesische Koordinaten, b) Zylinderkoordinaten, c) natürliche Koordinaten und d) mitrotierende kartesische Koordinaten. In den Fällen a), b), c) ist der Bahnverlauf beliebig, während im Fall d) eine Kreisbahn vorausgesetzt wird. FY eY a) Y a Y eY F a aX eX eY b) F FY eX eX eϕ Fϕ eϕ aϕeϕ er X c) a ar er r ϕ d) F Fn en anen en at et a Ft et et Fr e r F y F yey ay e y y ey ω ex a axe x Fx e x x x Kreisbahn Abb. 3.10. Kinetisches Grundgesetz F = ma für verschiedene Koordinatensysteme in der Ebene: a) raumfeste kartesische Koordinaten, b) Zylinderkoordinaten, c) natürliche Koordinaten, d) mitrotierende kartesische Koordinaten 3.2.9 Aufgaben zu Abschnitt 3.2 Aufgabe 3.1 (SG = 1) Ein Wagen der Masse m wird aus der Ruhelage von einer horizontalen Kraft F eine schiefe Ebene hinaufgeschoben. 1. Welche Geschwindigkeit hat der Wagen nach der Zeit t? 2. Welche Strecke wurde dann zurückgelegt? Bekannt: m = 5 kg, F = 50 N, t = 5 s, β = 300 . 86 3 Kinetik des Massenpunktes Aufgabe 3.2 (SG = 1) Lösen Sie die Aufgabenstellung in Beispiel 3.4, Stein in der Erdumlaufbahn, mit mitrotierenden kartesischen Koordinaten. Aufgabe 3.3 (SG = 2) Eine Punktmasse m ist wie dargestellt an einem Faden befestigt, an dem über eine Rolle mit der konstanten Kraft F gezogen wird. Ein Abheben der Masse nach oben bleibt bei der Bewegung ausgeschlossen. Welche Geschwindigkeit hat die Punktmasse, wenn diese die Strecke c zurückgelegt hat? Bekannt: b, c, F, m. Aufgabe 3.4 (SG = 1) Ein Fahrer fährt mit einem Motorrad einen Looping in einem kreisförmigen Metallgehäuse. Wie groß muss die gemeinsame Geschwindigkeit von Motorrad mit Fahrer mindestens sein, damit es nicht zum Sturz kommt? Wie groß ist dann die Winkelgeschwindigkeit ω? Lösen Sie die Aufgabe mit Zylinderkoordinaten, natürlichen Koordinaten und mitrotierenden kartesischen Koordinaten. Bekannt: R, h. Aufgabe 3.5 (SG = 2) Das Rührwerk aus Beispiel 2.10 wird mit einem variablen Moment der Form MT (ϕ) = Cϕ angetrieben. Die Konstante C folgt aus der Bedingung bestimmt, dass nach n Umdrehungen der Endwert M0 erreicht ist. Gesucht ist die Geschwindigkeit des Massenpunktes m nach n Umdrehungen. Bekannt: n = 50, M0 = 0.1 Nm, m = 3 kg. 3.2 Das dynamische Grundgesetz für den Massenpunkt Aufgabe 3.6 (SG = 1) Die dargestellte Rinne in einer Scheibe rotiert mit der Winkelgeschwindigkeit ω um eine senkrechte Achse. In der Rinne be¿ndet sich eine Kugel, welche sich aus der Anfangslage im Abstand r vom Zentrum der Scheibe löst. Wie groß ist die Geschwindigkeit der Kugel im Abstand R beim Austritt aus der Rinne? Bekannt: R, r, ω. Aufgabe 3.7 (SG = 2) Eine Röhre ist gegen die Vertikale um einen Winkel β geneigt. Sie dreht sich mit der Winkelgeschwindigkeit ω um eine vertikale Drehachse. In der Röhre bewegt sich reibungsfrei eine Kugel der Masse m. Wie groß muss ω sein, damit die Kugel die Höhe h erreicht? Bekannt: g, β, m, ω. Aufgabe 3.8 (SG = 2) Das Fahrzeug aus Aufgabe 2.25 erfährt während der Fahrt auf der parabelförmigen Bahn Y = bX 2 eine konstante Antriebskraft FA . Die Fahrt beginnt aus der Ruhelage an dem Punkt (X0 , Y0 ). Wie groß ist die Geschwindigkeit im Punkt 0? Bekannt: X0 = −50 m, b = 0.04 1/m, FA = 2 kN, m = 1.4 t. Hinweis: Kurvenintegral X1 X1 1 1 1 + Y (X)2 dX = arcsinh(2bX) + bX X 2 + 2 s= . 4b 4b X0 X0 87 88 3 Kinetik des Massenpunktes Aufgabe 3.9 (SG = 3) Ein Spielzeugauto der Masse m bewegt sich auf einer Spielautorennbahn mit der konstanten Bahngeschwindigkeit vA auf eine Loopingschleife zu. Auf Grund der zu niedrigen Fahrgeschwindigkeit kommt es im Punkt C zu einer Flugphase. Berechnen Sie 1. die Lage des Punktes C (β und hC ), in der das Fahrzeug den Kontakt zu der Bahn verliert und 2. die Länge xD zum Punkt D, in der das Fahrzeug nach dem freien Flug aufschlägt. √ Bekannt: vA = 3.5 g · r. Aufgabe 3.10 (SG = 3) Aus der Dachmitte A eines kugelförmigen Iglus mit dem Radius r löst sich ein Eiszapfen und rutscht ohne Reibung nach unten. An der Stelle B hebt der Eiszapfen von der DachÀäche ab und Àiegt bis zur Stelle C, an welcher er am Boden aufschlägt. Gesucht sind 1. die Höhe h zwischen BodenÀäche und der Stelle B, an welcher der Eiszapfen von der DachÀäche abhebt, 2. der Abstand d der Aufprallstelle C von dem Iglu. Bekannt: r, m, g. http://www.springer.com/978-3-540-36040-7