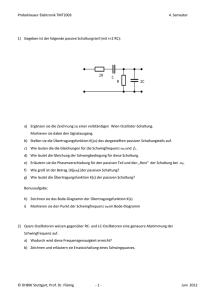
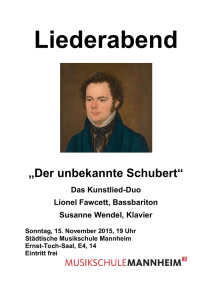
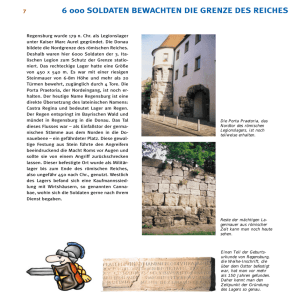
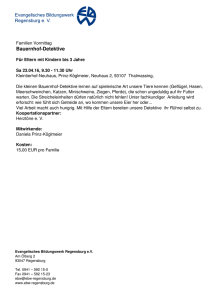
1 Grundlagen
Werbung

Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1 Grundlagen 1.1 Symbole und Zeichen 1.1.1 Quellen 1.1.1.1 Normierte Symbole für Quellen U U(x) I unabhängige Spannungsquelle gesteuerte Spannungsquelle unabhängige Stromquelle gesteuerte Stromquelle I(x) Man beachte die in den oben aufgeführten Symbolen enthaltene Symbolik für Kleinsignale: Kurzschluß oder Unterbrechung. 1.1.1.2 Andere, übliche Symbole für Quellen U, u U, u I, i I, i Spannungsquelle Wechselspannungsquelle Stromquelle Stromquelle, die Ringe können Transformator gesehen werden - SC / Seite 1-1 - als Symbol für den Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.1.2 Halbleiter-Bauelemente 1.1.2.1 Transistorsymbole, mit denen wir arbeiten pnp Bipolar-Transistor npn Bipolar-Transistor p-Kanal MOSFET, selbstleitend (engl.: depletion type), VT>0 p-Kanal MOSFET, selbstsperrend (engl.: enhancement type), VT<0 n-Kanal MOSFET, selbstleitend (engl.: depletion type), VT<0 n-Kanal MOSFET, selbstsperrend (engl.: enhancement type), VT>0 n-Kanal Sperrschicht FET, auch J(unction) FET genannt, oder MESFET (MES steht für „metal - semiconductor“, z.B. Alu - GaAs) p-Kanal Sperrschicht FET bzw. J FET (selten) - SC / Seite 1-2 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.1.2.2 Varianten: ähnliche Transistor-Symbole n-Kanal MOSFET, Bulk auf VSS n-Kanal MOSFET, Bulk auf VSS, Source mit Pfeil gekennzeichnet n-Kanal MOSFET, Bulk auf VSS, Source gekennzeichnet (rechts unten) p-Kanal MOSFET, Bulk auf VDD n-Kanal MOSFET, Bulk auf VSS VT > 0 1.1.2.3 Symbole mit mehreren Transistoren Oft sieht man zusammengesetzte Symbole, die eigentlich einen Kurzschluß zur Folge hätten. Diese Schreibweisen vereinfachen und veranschaulichen die graphische Darstellung. Oft sieht man zusammengesetzte Symbole, die eigentlich einen Kurzschluß zur Folge hätten. Diese Schreibweisen vereinfachen und veranschaulichen die graphische Darstellung. - SC / Seite 1-3 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg Die wichtigsten Leistungsschalter Symbol Innenschaltung Kommentar Q2 Darlington-Transistor, npn-Typ. Häufig als Leistungstreiber. ß = ß1ß2, UBE ≈ 1,4V. Oft mit Widerstand R, wodurch (a) bei IR ≥ IB2 der Arbeitspukt von Q1 stabililisert und (b) Q2 schneller ausgeschaltet wird. Q2 Darlington-Transistor, pnp-Typ. Sehr selten, da pnpTransistoren schlechtere Leistungstreiber sind, als npnTransistoren. UBE ≈ -1,4V. Q2 Pseudo- oder Komplementär-Darlington-Transistor, pnp-Typ. Häufig als Leistungstreiber. Effektiv, weil ein npn-Transistor den Hauptteil der Leistung treibt. ß = ß1ß2, UBE ≈ -0,7V. Q2 Pseudo-Darlington-Transistor, npn-Typ. Selten, da pnp als Leistungstreiber wenig hilfreich. UBE ≈ 0,7V. Wird zum IGBT, wenn man Q1 durch M ersetzt. Q1 R R Q1 Q1 R R Q1 Q M M Q IGBT: Insulated Gate Bipolar Transistor, n-Knal-Typ. häufig, ermöglicht leistungslose Steuerung großer Ströme. (Aus praktischen Gründen der fast ausschließlich gebaute IGBT.) IGBT: Insulated Gate Bipolar Transistor, p-Knal-Typ, selten. (Dieser IGBT-Typ wird aus praktischen Gründen sehr selten gebaut.) - SC / Seite 1-4 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.2 Spannung, Strom und Ladung 1.2.1 Kirchhoff’sche Maschenregel (Lit.: KVL: Kirchhoff’s Voltage Law) Die Summe aller Spannungen um eine Masche ist Null. R1 I1 Bild 1.2-1: U6 Spannungen einer geschlossenen Masche eines Netzwerkes U2 U1 U5 C3 U4 L4 U3 Beispiel Bild 1.2-1: U1 U 2 U 3 U 4 U5 U 6 0 Gegeben sei U1=1V, U2=2V, U3=3V, U4=4V, U5=5V. Wie groß ist U6 ? U 6 U 1 U 2 U 3 U 4 U 5 (1 2 3 4 5)V 3V 1.2.2 Kirchhoff’sche Knotenregel (Lit.: KCL: Kirchhoff’s Current Law) Die Summe aller Ströme in einen Schaltungsknoten ist Null. I2 Bild 1.2-2: Ströme an einem Knoten eines Netzwerkes I1 I6 I3 I4 I5 Beispiel Bild 1.2-2: I1 I 2 I 3 I 4 I5 I 6 0 Es sei I1=1mA, I2=2mA, I3=3mA, I4=4mA, I5=5mA. Wie groß ist I6 ? I 6 I 1 I 2 I 3 I 4 I 5 (1 2 3 4 5) mA 3mA - SC / Seite 1-5 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.2.3 Ströme und Ladungen eines Bauelementes Die Summe aller Ströme in ein Bauelement ist Null. Andernfalls lädt sich das Bauelement als Elektrode einer Kapazität durch Aufbau elektrischer Feldlinien gegen einen anderen Leiter auf. Bild 1.2-3: (a) (b) I1 CCE (a) Kapazität. (b) Bipolartransistor, interne Kapazitäten explizit gezeichnet Beispiel Bild 1.2-3(a): IC IE CBC I2 CBE IB Igesamt = I1 + I2 = 0 Die Ladung Q1 auf der oberen Kondensatorplatte in berechnet sich zu Q1 I 1dt Die gesamte Ladung Qgesamt in der Kapazität ist Qgesamt Q1 Q2 I gesamt dt 0dt 0 , wobei Q2 I 2 dt die Ladung auf der unteren Kondensatorplatte ist. Beispiel Bild 1.2-3(b): Igesamt = Ic + IB + IE = 0 Die gesamte Ladung Qgesamt in dem Transistor ist Qgesamt I gesamt dt 0dt 0 . 1.2.4 Ströme und Ladungen einer Schaltung Die Summe aller Ströme in eine Schaltung ist Null. Andernfalls lädt sich die Schaltung als Elektrode einer Kapazität durch Aufbau elektrischer Feldlinien gegen einen anderen Leiter auf. Bild 1.2-4: I1 Operationsverstärker I2 I4 I3 I5 Es bestehen keine galvanischen Verbindungen oder kapazitive Kopplungen zum Umfeld der Schaltung als den eingezeichneten. Der gesamte Strom in die Schaltung ist I gesamt I k 0 k Die gesamte Ladung Qgesamt(Igesamt) einer Schaltung ist Beispiel Bild 1.2-4: Qgesamt I gesamt dt 0dt 0 I1 I 2 I 3 I 4 I 5 0 - SC / Seite 1-6 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.2.5 Spannungs- und Stromteiler 1.2.5.1 Regeln zur Berechnung von Spannungs- und Stromteilern Es sei G1 = 1/R1 und G2 = 1/R2. (a) (b) Bild 1.2.5.1: a) Spannungsteiler b) Stromteiler R1 I1 U0 I0 R2 U2 Beispiel Bild 1.2.5.1(a): Spannungsteiler U1 R1 G2 U0 U R1 R2 G1 G2 0 U2 R2 G1 U0 U R1 R2 G1 G2 0 Beispiel Bild 1.2.5.1(b): Stromteiler I1 G1 R2 I0 I G1 G2 R1 R2 0 I2 G2 R1 I0 I G1 G2 R1 R2 0 I2 - SC / Seite 1-7 - R1 R2 Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.2.5.2 Anwendung von Spannungsteilern zur Impedanzmessung Messen des Ausgangswiderstandes einer Schaltung Verstärker Bild 1.2.5.2-1: Verstärker mit zuschaltbarer Last. Voltmeter S Zout Uin Zin Ri AvUin Uout ZL V Bild 1.2.5.2-1 zeigt einen Verstärker dessen Ausgangswiderstand gemessen werden soll. Der Innenwiderstand Ri des Voltmeters soll wegen Ri >> Zout||ZL vernachlässigt werden. Bei geöffnetem Schalter und Uin(t)=Ui0sint(t) messen wir die Ausgangsamplitude Uout=U0. Bei geschlossenem Schalter und gleichem Uin ist die Ausgangsamplitude Uout=aU0. Aus obiger Spannungsteilerregel ergibt sich Z out Z L 1 a . a Beispiel: für a=0,75 und ZL=100 ist der Ausgangswiderstand der Schaltung Z out 100 1 0.75 33,3 0.75 Es sei daran erinnert, dass 0 a 1 sein muß und dass für a=½ ZL=Zout ist. Bei der sogenannten „Halbspannungsmethode“ verändert man ZL bis a= ½ ist. Messen eines hohen Eingangswiderstandes S Voltmeter Verstärker Rs Ugen Voltmeter Zout Ri V Uin Zin AvUin Ri Uout V Bild 1.2.5.2-2: Messung eines hohen Eingangswiderstandes. In Bild 1.2.5.2-2 soll der Eingangswiderstand einer Schaltung gemessen werden. Es sei z.B. Zout100 und Zin5M, daher wird RS=4,7M gewählt. Das Messgerät ist mit einem Eingangswiderstand von Ri1M spezifiziert. Würde man das Messgerät vor den Eingang schalten (durchgestrichen dargestellt), so würde man mehr den Innenwiderstand des meßgerätes als den Eingangswiderstand der Schaltung messen. - SC / Seite 1-8 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg Daher hängt man das Messgerät an den Ausgang der Schaltung und misst, um welchen faktor a die Amplitude Uout durch Zuschalten von RS zusammenbricht. Bei konstanter Verstärkung AV des Vesrtärkers muss der Spannungseinbruch a am Ein- und Ausgang gleich groß sein, so dass man den Faktor a, der am Eingang auftritt, am Ausgang messen kann. Mit Hilfe der Spannungsteilerformel angewendet auf RS und Zin erhält man Z in RS a 1 a mit a U out ( RS 4,7 M) U out ( RS 0) 1.2.5.3 Parallelschaltung von Widerstand und Leitwert (a) Bild 1.2.5.3: Parallelschaltung von (a) Widerstand R und Leitwert G, (b) Widerstand R und Leitwert sC. (b) R 1 G R Häufig findet man die Paralleschaltung von einem Leitwert und einem Widerstand. Man erhält die Gesamtimpedanz zu Z = R||G-1 = R G 1R = . 1 1 GR G R Der Widerstand wird also um den Faktor (1+GR) gemindert. Als Beispiel sei hier die Parallelschaltung eines Widerstandes R und einer Kapazität mit Leitwert sC genannt. Als Gesamtimpedanz erhält man Z= R . 1 sCR - SC / Seite 1-9 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.2.6 Energie–Quellen und –Senken 1.2.6.1 Identifikation von Energie–Quellen und –Senken Wenn Spannungs- und Strompfeil an einem zweipoligen Bauelement in die gleiche Richtung zeigen, dann handelt es sich bei einem positiven produkt um eine Energiesenke und bei einem negativen Produkt um eine Energiequelle. (Wechsel möglich, z.B. C, L, Akku, Photodiode ...) (a) Bild 1.2.6.1: Solarzelle. Sie kann je nach Betrieb als Energiequelle oder Senke arbeiten. Im Bild arbeitet sie im schraffierten Bereich als Quelle. (b) ID ID UD IPh -IPh - SC / Seite 1-10 - UD Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.2.6.2 Umformung von Spannungs- und Stromquellen R U0 = I0 R U0 R Stromquelle: R I0 I0R=U0 G Spannungsquelle: Spannungsquelle: R1 R1 U0 R2 U0 R1+R2 U2 R2 R2 Spannungsquelle: R1 R2 I0 R2 Stromquelle: I1 I0 I2 R1 I0 R2 R1 Spannungsquelle: I1 U0 I0R2=U2 U2 I2 R1 U0 R2 Bild 1.2.6.2: Elektrisch äquivalente Schaltkreise. - SC / Seite 1-11 - R2 Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.2.6.3 Spannungsquelle mit Spannungsteiler realisieren (a) (b) Bild 1.2.6.3: (a) Benötigte Schaltung. (b) Realisierung mit Hilfe von VDD. VDD R2 U2 R1 U1 U0 Zout U1 VSS VSS Benötigt werde eine Spannungsquelle mit der Quellspannung U1 und der Ausgangsimpedanz Zout gemäß Bild 1.2.6.3(a) benötigt. Realisiert werden soll diese Quelle mit dem Spannungsteiler in Biteil (c). Wir definieren die Spannungsteilerverhältnisse als Aus der Paralleschaltungsformel Z out Und somit R1 R1 Z out R1 R2 R1 R2 a U1 R1 , U 0 R1 R2 b U2 R2 U 0 R1 R2 ergibt sich Z out aR2 bR1 Z out Z , R2 out . Einsetzen der Spannungsverhältnisse für a und b liefert b a U0 , U2 R2 Z out U0 U1 Wenn man die Konstante b eleiminieren möchte: Wie aus der obigen Definition von a und b leicht zu ersehen ist gilt a+b=1 b=1-a. Folglich kann R1=Zout/b auch bestimmt werden aus R1 Z out a R2 . 1 a 1 a - SC / Seite 1-12 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.2.7 Lineare Überlagerung in linearen Netzwerken (lineare Superposition) Bild 1.2.7(a): Lineares Netzwerk mit drei voneinander unabhängigen Quellen. Gesamtspannung U3= = U3,1+U3,2+U3,3 Gesamtstrom IC3 = IC3,1+IC3,2+IC3,3 Gesamtstrom IL3 = IL3,1+IL3,2+IL3,3 U1 R2 I3 C3 U3 U2 R1 L3 Partialgrößen Ui, ICi, ILi berechnen: (b.1): Situation für U2=I3=0, Berechnung der Partialgrößen IC3,1 IL3,1 U3,1 mit der Quellenumwandlung I1=U1/R1: I C 3,1 I L 3,1 I 1 U R12 1 R1 R12 Z 3 R12 R1 || R2 I1 R12 Z 3 ( R1 || R2 ) Z 3 I1 R1 R2 , U3,1= I3,1(sL+1/sC) (b.2): Situation für U1=I3=0, Berechnung der Partialgrößen IC3,2 IL3,2 U3,2 mit der Quellenumwandlung I2=U2/R2: I C 3,2 I L3,2 R12 U2 R12 I2 R12 Z 3 R2 R12 Z 3 , R1 C3 IC3,1 L3 IL3,1 C3 IC3,2 L3 IL3,2 C3 IC3,3 L3 IL3,3 I2 R2 U3,2= I3,2(sL+1/sC) (b.3): Situation für U1=I2=0, Berechnung der Partialgrößen IC3,3 IL3,3 U3,3: I L 3,3 I 3 ZC Z C X L3 , I C 3,3 I 3 I L3,3 R1 R2 I3 U3,3= IL3,3 sL+ IC3,3 /sC) Gemäß dem Prinzip der linearen Superposition (i.e. der linearen Überlagerung) überlagert sich der Einfluß der einzelnen Quellen linear und unabhängig voneinander. Das Verhalten des Netzwerkes kann berechnet werden, indem man die Wirkungen der einzelnen Quellen einzeln berechnet und anschließend summiert. Bildteil (a) oben zeigt ein lineares Netzwerk mit drei voneinander unabhängigen Quellen. Gesucht seien U3, IC3 und IL3. Die Partialströme und -spannungen einer Quelle findet man, indem man die Quellgrößen aller anderen Quellen zu Null setzt. Eine Spannungsquelle mit Spannung Null entspricht einem Kurzschluß. Eine Stromquelle mit Strom Null entspricht einer Unterbrechung. Voneinander abhängige Quellen müssen gleichzeitig berücksichtigt werden, z.B. UBE und IC eines Bipolartransistors. - SC / Seite 1-13 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.2.8 R2R-Leiter: Spannungsteiler und D/A-Wandler (a) U (b) U 2 R U R 1 Zin => R =2R (d) R U 2 Zin => U 2 10 R U 4 9 R U 8 R 8 2R U 16 R Zin => =2R U 32 6 2R U 64 R 5 2R U 2 U 4 R 2 R 7 2R R U 1 2R =R (c) U 2 R U 128 4 2R R 2R R U 256 U 512 3 2R 1 R 2 2R 2R 1 R Uout (e) R 9 R 0 R 1 R 2 R 3 R R 4 5 R 6 7 R 2R 2R 2R 2R 2R 2R 2R 2R Rx 0V a0 a1 a2 a3 a4 a5 a6 a7 0V Bild 1.2.8: Spannungsteiler und lineare Superposition, aus Prüfungsaufgabe Schreiben Sie in Bild 1(a) die Werte für die Spannung an Knoten 1 (gekennzeichnet durch einen Kreis um die Ziffer '1') als f(U) und Zin als f(R). (2P) Schreiben Sie in Bild 1(b) die Werte für die Spannung an Knoten 1 als f(U) und Zin als f(R). (2P) Schreiben Sie in Bild 1(c) die Werte für die Spannungen an den Knoten 1 und 2 als f(U) und (2P) Zin als f(R). Schreiben Sie in Bild 1(d) die Werte für die Spannungen an die Knoten 1 ... 9 als f(U). (2P) In Bild 1(e) seien ax (x=0...7) ideale Spannungsquellen mit Zout=0 und Rx=2R. Welche Impedanz Zi gegen Masse haben die Schaltungsknoten i (i=0...7) als f(R)? Zi= 2R/3, i=0…7 (2P) Bild 1(e): Rx=2R, alle Quellen aj=0V für j≠i und ai=U? Wie groß ist Ui? Bild 1(e): Rx=2R, a7=a5=U und alle Quellen aj=0V. Wie groß ist Uout? Bild 1(e): Rx, a7=U und alle Quellen aj7 = 0V? Wie groß ist Uout? (2P) (2P) (2P) Allgemein: U out Ui=U/3 Ui=U/3+U/12 Uout=U/2 7 2 7 i 8 a 2 wenn R =2R. In der Praxis meist R , U x x i ai 2i8 . out 3 i 0 i 0 - SC / Seite 1-14 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.3 Das Grundprinzip der Verstärkung 1.3.1 Verstärkung eines Vierpols (a) (b) Cx Xj Rx n1 Ri U1 Ly n2 Lx n1 U2 n0 n3 I2 = GmU1 U1 C y n2 Z2 n3 Iz U2 n0 Bild 1.3.1: (a) Beliebiges Netzwerk mit U2=f(U1), (b) reduziertes Netzwerk Bild 1.3.1(a) zeigt ein beliebiges Netzwerk mit U2=f(U1). Nach einigen Umformungen sei es gelungen, das Netzwerk auf die im Bildteil (b) gezeigten Komponenten zu reduzieren. Mit diesem reduzierten Netzwerk lässt sich die Spannungsverstärkung AV=U2/U1 zu ermitteln. Es ist U2 = I2 Z2 = [GmU1] Z2 = (GmZ2) U1. Ohm'sches Gesetz = I2 = [..] = AV = (..) Die Spannungsverstärkung AV=U2/U1 berechnet sich zu AV g m Z 2U 1 U2 = Gm Z2 U1 U1 Im reduzierten Netzwerk ... (a) darf zwischen den Knoten n1 und n3 eine beliebige Schaltung liegen, entscheidend ist die Spannung U1 zwischen den Knoten n1 und n3. (b) ist Z2 die Impedanz zwischen den Knoten, zwischen denen U2 gemessen wird. (c) liegt die Stromquelle i2 zwischen den Knoten, zwischen denen U2 gemessen wird. (d) enthält Z2 sämtliche Einflüsse auf die Impedanz zwischen den Knoten n2 und n0, z.B. auch Koppelkondensatoren und die Eingangsimpedanz der folgenden Stufe. In der Regel ist n0 der Masseknoten. Differentielle Ausgänge sind oft leichte als Differenz zweier „single-ended“ Ausgänge zu berechnen, die beide gegen Masse arbeiten. - SC / Seite 1-15 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.3.2 Verstärkung eines 4-Pols 4-Pol I1 I2 ZG U1 UGen Zin GmU1 Zo U2 ZL Bild 1.3.2: Beliebiges 4-Pol-Netzwerk Bild 1.3.2 zeigt einen beliebiges 4-Pol-Netzwerk, gespeist von einem Generator mit Innenwiderstand ZG und belastet mit einer Lastimpedanz ZL. Es ist Spannungsverstärkung: AV U2 U1 (Gl. 1) Stromverstärkung: AI I2 I1 (Gl. 2) Eingangsimpedanz: Z in U1 I1 (Gl. 3) Ausgangsimpedanz: Zo Lastimpedanz: ZL U2 I2 (Gl. 4) Für den Zusammenhang zwischen Stromverstärkung und Spannungsverstärkung folgt AI = Z U /Z U Z I2 = 2 L = 2 in = AV in I1 U 1 / Z in U 1 Z L ZL Die Leistungsverstärkung AP des Systems als Funktion von AV, Zin und ZL berechnet sich zu AP AV AI AV Z in Z AV AV2 in ZL ZL Anmerkungen: Da keine speziellen Voraussetzungen an das Netzwerk geknüpft wurden, gilt diese Formel sehr allgemein und erlaubt ein Messen von AI ohne Öffnen des Stromkreises. Die oft schwierig zu messende Ausgangsimpedanz Zo wird in der Formel nicht benötigt. AV muss im Betrieb und bei anliegender Last gemessen werden, da Av, AI, AP = f(ZL). - SC / Seite 1-16 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.3.3 Das Verstärkungs-Bandbreite-Produkt (a) (b) n1 40 lH(s)l dB 20 n2 0 U1 I2 R2 C2 0,01 0,1 1 10 100 f/fT 0,01 0,1 1 10 100 f/fT -20 S n0 n3 U2 -40 (H(s)) 0° -45° -90° Bild 1.3.3-1: (a) Verstärker-Netzwerk, (b) Übertragungsfunktion Auf einer 1/f (i.e. –20dB/dec) Kennlinie ist das Produkt aus Bandbreite und Verstärkung konstant. Gegeben sei das Verstärkernetzwerk in Bild 1.3.3-1(a) und I2 = Gm U1 mit konstantem Gm>0. Die Übertragungsfunktion H(s)=U2(s)/U1(s) für offenen (nicht leitenden) Schalter S berechnet sich zu H(s) = Gm Z2 = Gm / sC2. Für s=j2πf ergibt sich die Übertragungsfunktion H(jf) zu H(jf) = Gm Z2 = Gm / j2πfC2. also |H(jf)| = fT / f. Die durchgezogene Linie im Bode-Diagramm in Bild 1.3.3-1(b) stellt diese Übertragungsfunktion dar. Das Verstärkungs-Bandbreite-Produkt GB mit G=|H(jf)| und f=B berechnet sich zu GB Gm G B m j 2BC 2 2C 2 - SC / Seite 1-17 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg Zur Berechnung von GB stellen wir die Rechnung in der Transitfrequenz auf: GB = fT 1 = fT (vorausgesetzt, die Steigung in f=fT nicht schon 0 oder –40dB/dec ist) Der Schalter S in Bild 1.3.3-1(a) werde nun geschlossen (Innenwiderstand 0). Dadurch ergibt sich ein Pol in der Freqenz p (festgelegt durch die bedingung R=XC mit XC=1/pC). Seine Wirkung auf die Asymptoten der Übertragungsfunktion sind in Bild 1.3.3-1(b) gestrichelt eingezeichnet. Verstärkungs-Bandbreite-Produkt ist auf der Geraden mit der Steigung von –20dB/dec gültig, also in Bild 1.3.3-1(b) für f > fp = 0,1 fT. Bild 1.3.3-2 zeigt eine Eingangsspannung U1 = 2,5Vcos(2πf1t) zu dem Netzwerk in Bild 1.3.3-1 und für tt1 sowie f1/fT für t>t2 die zugehörige Ausgangsspannung U2 im eingeschwungenen Zustand. (Zwischen t1 und t2 findet ein Einschwingvorgang statt.) Wie groß ist das Verhältnis f1/fT für tt1 bzw. f2/fT für t>t2? Begründen Sie kurz Ihre Antwort. (Eine Antwort finden Sie in der SC-Prüfung vom WS 2001/2002.) (a) U1 (b) 2.5V 0V -2.5V time t1 t2 5V time U2 0V -5V Übergang Bild 1.3.3-2: Veranschaulichung des Verstärkungs-Bandbreite-Produkts im Zeitbereich: (a) Eingangsspannung und (b) Ausgangsspannung des Netzwerkes in Bild 1.3.3-1(a). - SC / Seite 1-18 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.4 Miller-Effekt 1.4.1 Miller-Effekt: Herleitung Ym (a) i1 i*1 i*2 u1 Zi Gm u1 Zo Zi Gm u1 Zo i2 Av*u1=u2 (b) u1 Y*m1 Y*m2 u2 (a) Leitwert Ym über einem Schaltungsteil mit u2 = Av u1, (b) Umformung der Schaltung nach Miller. Bild 1.4.1: Bild 1.4.1(a) zeigt eine Schaltung mit u2 = Av u1 und einem Leitwert Ym (bzw. Impedanz Zm=1/Ym) zwischen u1 und u2. Diese Schaltung läßt sich nach dem Theorem von Miller in die Schaltung von Bild 1.4.1(b) umformen. Beweis: i1* (u1 u2 )Ym (u1 Av u1 )Ym u1 (1 Av )Ym Ym*1 i1* / u1 (1 Av )Ym Ym*1 (1 Av )Ym Z m* 1 Zm 1 Av Z m* 2 Zm 1 1 / Av Analog berechnet sich Y*m2 als Funktion von Av und Ym : i 2* (u2 u1 )Ym (u 2 u 2 / Av )Ym u 2 (1 1 / Av )Ym Ym*2 i 2* / u 2 (1 1 / Av )Ym Ym*2 (1 1 / Av )Ym - SC / Seite 1-19 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.4.2 Miller-Effekt Anwendungen 1.4.2.1 Miller-Effekt mit negativer Rückkopplung in bipolarer Verstärkerstufe UCC Bild 1.4.2.1: RC Schaltung mit MillerKondensator URC U2 Cm Ri U1 Q1 * Cm1 C*m2 U3 In Bild 1.4.2.2 erzeugt der Innenwiderstand Ri der Quelle einen Pol mit der Kapazität Cm. Dieser Pol liegt in der Frequenz fp 1 2RiCm* 1 mit Cm* 1 Cm (1 AV ) . Nehmen wir für obige Schaltung AV=-200, dann ist die Eingangskapazität mit C*m1 = (1-(-200))·Cm = 201·Cm erheblich vergrößert, während der Miller-Effekt am Ausgang mit C*m2 = (1-(-1/200))·Cm = 1,005·Cm vernachlässigbar ist. Speziell bei hochfrequenten Schaltungen wird die kleine aber unvermeidliche BasisKollektor-Kapazität des Transistors aufgrund des Miller-Effekts zu einem erheblichen Problem. - SC / Seite 1-20 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.4.2.2 Kaskoden-Schaltung zur Reduktion des Miller-Effekts (a) (b) (c) VCC VCC (d) VCC ICa VCC ICa ICa ICa n3 Q2 UB Cm n2 n1 gnd Q1 n1 C*m1 Cm n2 Q1 n1 C*m2 n3 Q2 UB n2 Q1 gnd n1 Cm1 n2 Q1 C*m2 Bild 1.4.2.2: (a) Verstärker mit Biplartransistor, (b) Millerkapazität bzgl. (a) umgerechnet (c) Kaskodierter Verstärker, (d) Millerkapazität bzgl. (c) umgerechnet. Zu Bildteilen (a) und (b): Z2 = rCE1 = VA/IC = 104V/1mA = 104KΩ -AV = Gm·Z2 = gm·rCE1 = (IC/uT)·VA/IC = VA/uT = 104V/26mV = 4000 C*m1 = Cm·(1-AV) = 1nF4001 = 4,001 µF C*m2 = Cm·(1-1/AV) = 1nF1,00025 = 1 nF fp = 1/(2πZ1C*m2) = 1/(2π·104KΩ·1nF) = 1530 Hz - SC / Seite 1-21 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.4.2.3 Miller-Effekts mit positiver Rückkopplung: Bootstrapping (a) (b) (c) VDD VDD R2 VDD R2 u1 R2 u1 u1 Ck Ck1 1 C3 u2 R1 RS Ck RG R1 1 C3 u2 RS gnd R*G1 R1 gnd R*G2 u2 RS gnd Bild 1.4.2.3: (a) Verstärkerstufe mit JFET, Eingangswiderstand Zin,a=R12=R1||R2 (bei XC≈0), (b) Verstärkerstufe mit JFET, Eingangswiderstand Zin,b=R*G1, (c) Verstärkerstufe gemäß Bildteil (b) mit RG umgerechnet in R*G1 und R*G2. In Bild 1.4.2.3(a) beträgt die resistive Eingangsimpedanz Zin,a=R12=R1||R2. Bild 1.4.2.3(b) zeigt die Kleinsignal-Eingangsimpedanz erheblich vergrößert, indem die positive Verstärkung 0<AV<1 der Drain-Schaltung über C3 auf den Eingang rückgekoppelt wird. (Großsignalrückkopplung ist nicht notwendig, da die Koppelkapazität Ck1 den DCAnteil des Eingangssignals nicht durchlässt.) Die DC-Einstellung der Gatespannung erfolgt wie in Bildteil (a) durch R1 und R2. Bild 1.4.2.3(c) zeigt die gleiche Situation wie Bildteil (b) jedoch mit RG umgerechnet nach Miller in R*G1 und R*G2. Betrachtet man alle Kapazitäten als Kleinsignalkurzschluss, dann gilt RG* 1 RG (1 Av ) RG* 2 und RG (1 1 / Av ) Nehmen wir als typische Zahlenwerte R1, R2 im Bereich 20...100KΩ, RG=1MΩ und AV=0,8. Als resistive Kleinsignaleingangsimpedanz erhalten wir nun RG* 1 1M 5M (1 0,8) RG* 2 und 1M 4M (1 1 / 0,8) Damit haben wir den gewünschten Effekt der sehr hohen Kleinsignal-Eingangsimpedanz von 5MΩ. Die Impedanz R*G2 wird mit –4MΩ negativ. Eine negative Eingangsimpedanz ist ein Generator. Der Eingangskonten mit der Spannung u1 wird weiterhin als Quelle gesehen, allerdings nicht mit dem Innenwiderstand RG=1MΩ sondern mit R*G2=4MΩ. - SC / Seite 1-22 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.4.2.4 Großsignalanwendung des Miller-Effekts in der Digitaltechnik Bild 1.4.2.4: Digitaler CMOSInverter (a) Miller-Kapazität Cm. (b) mit äquivalenten Kapazitäten C*m1 und C*m2. VDD (a) VDD (b) MP Uin Uout Cm MN MP Uin Uout C*m1 MN C*m2 VSS VSS Die Miller-Kapazität in Bild 2 ist gestrichelt eingezeichnet, weil sie nicht absichtlich eingebaut wird, sondern aus den unvermeidlichen Kapazitäten Gate-Drain-Kapazitäten besteht: Cm = CGD(MN) + CGD(MP). Die äquivalenten Kapazitäten C*m1 und C*m2 ergeben sich damit zu C*m1 = Cm (1-AV) und C*m2 = Cm (1-1/AV). Tabelle 2 liefert AV = -1 für die stationären Endwerte. Tabelle 1.4.2.4: Zusammenhang zwischen Uin und Uout Uin = Uout = VSS VDD VDD VSS Für die äquivalenten Kapazitäten ergibt sich damit C*m1 = C*m2 = 2Cm. Der doppelte Spannungshub an Cm wird umgerechnet in einen einfache Spannungshub an C*mx. Anmerkung zu Praxis. Parasitäre Kapazitäten von Leitungen, Transistoren und anderen Bauelementen werden von Extraktionsprogrammen aus dem Layout Lasten ermittelt. Programme, die derlei leisten, findet man oft unter dem Kürzel „LVS“, welches für „Layout versus Spice“ steht. Als erstes erstellt man einen Stromlaufplan (engl. Schematics), setzt diesen auf Maskenebene in geometrische Strukturen auf dem Halbleiter um und lässt anschließend die LVS-Software prüfen, ob der Stromlaufplan und das daraus erstellte geometrische Layout die gleiche Schaltung repräsentieren. Bei dieser Gelegenheit extrahiert das Programm auch parasitäre Kapazitäten, sowohl direkt als auch – beispielsweise beim Inverter – um den Miller-Effekt vergrößert. - SC / Seite 1-23 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.5 Geschaltete Kapazitäten Ein wesentliches Merkmal dieser Schaltungstechnik ist der Übergang von einem zeitkontinuierlichen auf ein zeit-diskretes System, welche die üblichen Probleme der Abtastung mit sich bringt wie beispielsweise Aliasing. Andererseits sind geschaltete Kapazitäten automatisch Track- & Hold-Schalter, wie sie für die A/D-Wandlung benötigt werden. Daher findet man sie auch dort besonders häufig. Für Chip-Designs muss man die Daten des Kapazitätsbelages aus den Technologieparametern ermitteln. Platinen (engl. Printed Circuit Boards oder PCBs) werden heutzutage meistens aus 0,2 mm dicken FR4-Platten (FR = flame retarded) hergestellt, einem Epoxidharz- und Glasfasergewebe mit εr=3,4, so dass sich gemäß C= εr· ε0·Fläche/Plattenabstand mit ε0=8,854·10-12F/m ein Kapazitätsbelag von 15pF/cm2 ergibt. 1.5.1 Quer geschaltete Kapazität als äquivalenter Leitwert (a) U1 (b) n1 Q1 1 n2 C U2 U1 (c) n1 2 n2 U2 U1 IR n1 R n2 U2 1 C Bild 1.5.1 (a) C lädt an U1, (b) C lädt um auf U2, (c) äquivalenter Widerstand und Quelle. In Bild 1.5.1-1 (a) enthält die Kapazität C die Ladung Q1 = CU1. In Bild 1.5.1-1 (b) enthält die Kapazität C die Ladung Q2 = CU2. Die von Situation (a) nach (b) transportierte Ladung ist Q = Q1 - Q2 = C(U1 - U2). Bewegt man den Schalter mit der Frequenz fS hin und her, dann fließt der mittlere Strom ICm = fSQ = fSC(U1-U2). De gleichen Strom liefert ein äquivalenter Leitwert oder ein äquivalenter Widerstand Gequiv = fSC Requiv = 1/fSC. - SC / Seite 1-24 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.5.2 Quer geschaltete Kapazität als treibende Spannungsquelle Quer geschaltete Kapazität als Quelle ohne Vorzeichenumkehr (a) (b) n1 1 n2 C U 34 U12 n2 (c) n1 CL C U12 n4 2 n2 n2 U34 R CL U12 U34 CL n4 Bild 1.5.2-1: (a) C lädt an U1, (b) C lädt um auf U2, (c) äquivalenter Widerstand und Quelle. Man kann die Kapazität auch an einer beliebigen Quelle mit der Spannungsdifferenz U12 laden und anschließend beide Seiten der Kapazität umschalten, wie in Bild 1.5.1.2-1. Man hat dann eine treibende Quelle (, bei der nur die Spannungsdifferenz festliegt,) mit der Quellenspannung U12 und dem Innenwiderstand Requ=1/fC. Quer geschaltete Kapazität als Quelle mit Vorzeichenumkehr Wenn man mit zwei Schaltern arbeitet, liegt es nahe, dass man die Kaazität auch umpolen und somit das Vorzeichen der Spannungsquelle U12 in Bildteil (c) mit umgekehrter Polarität verwenden kann. (a) (b) n1 1 n2 C U12 n2 U34 n4 (c) n1 CL 2 C U12 n2 n2 U34 R CL -U12 U34 CL n4 Bild 1.5.2-2: (a) C lädt an U1, (b) C lädt um auf U2, (c) äquivalenter Widerstand und Quelle. - SC / Seite 1-25 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.5.3 Längs geschaltete Kapazität als äquivalenter Leitwert Gleichsinnig bewegte Schalter: Ohne Vorzeichenumkehr von U1: (a) (b) (c) Q1 U1 1 C U2 Q2 U1 1 2 C IR R U2 U1 2 U2 U1-U2 0V Bild 1.5.2-1: (a) C lädt an U1, (b) C lädt um auf U2, (c) äquivalenter Widerstand und Quelle. In Bild 1.5.3.1(a) entlädt die Kapazität C auf die Ladung Q1 = 0 In Bild 1.5.3.1(b) lädt die Kapazität C auf die Ladung Q2 = C(U1 – U2) Die von Situation (a) nach (b) transportierte Ladung ist Q = Q2 – Q1 = C(U1 - U2) - 0. Bewegt man den Schalter mit der Frequenz f hin und her, dann fließt der mittlere Strom ICm = fSQ = fSC(U1-U2). Den gleichen Strom liefert ein äquivalenter Leitwert oder ein äquivalenter Widerstand Gequiv = fSC Requiv = 1/fSC. Gegensinnig bewegte Schalter: Vorzeichenumkehr von U1: In Bild 1.5.3.2(a) lädt die Kapazität C auf die Ladung Q1 = C U1 In Bild 1.5.3.2(b) lädt die Kapazität C auf die Ladung Q2 = -C U2 Die von Situation (a) nach (b) transportierte Ladung ist Q = Q2 – Q1 = C(–U2 – U1). Bewegt man den Schalter mit der Frequenz f hin und her, dann fließt der mittlere Strom ICm = fSQ = fSC(-U1–U2). Den gleichen Strom liefert ein äquivalenter Leitwert oder ein äquivalenter Widerstand (a) Gequiv = fSC Requiv = 1/fSC. (b) Q1 U1 1 C U1 U2 2 (c) Q2 U1 2 C U2 1 IR R -U1 U2 -U2 Bild 1.5.3.2: (a) C lädt an U1, (b) C lädt um auf U2, (c) äquivalenter Widerstand und Quelle. - SC / Seite 1-26 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.6 Arbeiten mit Polen und Nullstellen 1.6.1 Pole und Nullstellen im Orts- und Bode-Diagrammen (a) (b) U1 C (c) j R U2 -1/RC 0 lH(s)l dB 0,1 1 10 100 p -40 s=+j 0 0,1 1 10 100 p (H(s)) Grad -90 Bild 1.6.1-1: (a) Schaltung mit Pol, (b) Lage des Pols in der komplexen s-Ebene, (c) BodeDiagramm mit Betrag und Phase der Übertragungsfunktion H (s) 1 / sC 1 1 1 = R 1 / sC sRC 1 1 s /(1 / RC ) 1 s / s p => s p 1 / RC . Bild 1.6.1-1 zeigt ein System mit einem Pol, gelegen in sp=-1/RC in der komplexen Ebene. Ein System ist stabil, wenn alle seine Pole in der negativen halbebene liegen. Alle Reaktionen am Ausgang klingen ab, wenn der Eingang Null ist. Ein Pol in der linken Halbebene bewirkt im Amplitudengang eine Abbiegung nach „rechts“, und zwar in der Polfrequenz p=|sp|, wenn man in Richtung f schaut. Die Tangenten an |H(s)| haben einen Schnittpunkt in einem Pol. Ihre Steigung verringert sich um 20dB/dec (=6dB/oct), wenn man mit Spannungen und Strömen rechnet. Bei leistungen sind es 10dB/dec bzw. 3dB/oct. Ein Pol bewirkt ferner eine Phasendrehung von 0...–90°. Amplitudenfehler der Tangentennäherung in /p=1: Phasenfehler der Tangentennäherung in /p=1: Phasenfehler der Tangentennäherung in /p=0,1: Phasenfehler der Tangentennäherung in /p=10: 3 dB 0° arctan(0,1) = 5,71° arctan(10) – 90° = -5,71° Eine Nullstelle ist die Umkehrung eines Pols, bewirkt eine Abbiebung nach „links“ im Amplitudengang und eine Phasendrehung von 0...90° im Phasengang Frage: Wie verhalten sich Pol- und Nullstellen in der positiven (rechten) Laplace-Halbebene? (Lösung: Polstelle in positiver Halbebene: Instabilität da aufklingende Schwingung. Nullstellen in der pos. Halbebene verhalten sich im Amplitudendiagramm wie Nullstellen in der neg. Halbebene, drehen aber die Phase umgekehrt. Da Nullstellen in der Stabilitätsbetrachtung zum Gewinn von Phasenreserve dienen, kosten Nullstellen in der pos. Halbebene Phasenreserve vergrößerte Instabilität.) - SC / Seite 1-27 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.6.2 Pole und Nullstellen in Übertragungsfunktionen Übertragungsfunktion eines Systems mit Polen und Nullstellen: H (s) ( s s z1 ) ( s s z 2 ) ... ( s s zm ) Y ( s) K , mit K konstant, X ( s) ( s s p1 ) ( s s p 2 ) ... ( s s pn ) X(s) und Y(s) sind die Laplace-Transformierten der Ein- und Ausgangssignale x(t) und y(t). Anzahl Nullstellen: m Anzahl Pole: n Ordnung Zählerpolynom: m Ordnung Nennerpolynom: n Ordnung der Übertragungsfunktion H(s): Maximum von m und n Nullstellen von H(s): sz1, sz2, ...,.szm Pole von H(s): sp1, sp2, ..., spn Ein natürliches System verhält sich bei hinreichend hohen Frequenzen immer träge, so dass letztendlich in der Natur immer n>m sein muss. 1.6.3 Die inverse Übertragungsfunktion 1.6.3.1 Mathematische Betrachtungen und Folgerungen Es ist y(s) = H(s) x(s). Gesucht ist die Umkehrfunktion G(s), so dass x(s) = G(s) y(s): G(s) = 1 1 ( s s p1 ) ( s s p 2 ) ... ( s s pn ) H ( s ) K ( s s z1 ) ( s s z 2 ) ... ( s s zm ) Die inverse Übertragungsfunktion G(s)=H-1(s) erhält man im Bode-Diagramm durch Spiegelung von H(s) an der 0dB-Achse. Folgerungen: Wo H(s) eine Nullstelle hat, da hat G(s) einen Pol Wo H(s) einen Pol hat, da hat G(s) eine Nullstelle Beschreibt H(s) einen Tiefpass, dann beschreibt G(s) einen Hochpaß Beschreibt H(s) einen Hochpass, dann beschreibt G(s) einen Tiefpaß Beschreibt H(s) einen Bandpass, dann beschreibt G(s) eine Bandsperre Beschreibt H(s) einen Bandsperre, dann beschreibt G(s) einen Bandpass - SC / Seite 1-28 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.6.3.2 Anwendungen der inversen Übertragungsfunktion (a) uno (c) Av (b) dB 80 Av(s) 40 uno(s) 0 uni log(f/Hz) -40 Av uni(s) -80 Bild 1.6.3.2-1: (a) Schaltung mit Rauschquelle von 0dB im Ausgang, (b) Schaltung mit äquivalentem Eingangsrauschen, (c) Übertragungsfunktionen Av(s), u no (s ) , u ni (s ) . Bild 1.6.3.2-1(a) zeigt einen OP mit der Ausgangsrauschquelle u no ( s ) 0dB . Dieses weiße Ausgangsrauschen soll gemäß Bildsteil (b) umgerechnet werden in ein äquivalentes Eingangsrauschen. Bild 2.3.1(c) zeigt Av(s) des OPs und die Rauschspannung u no (s ) . Das äquivalente Eingangsrauschen u ni (s ) erhält man gemäß Bild 1.6.3.2-1(c) zu u ni ( s ) AV1 u no ( s ) Rückgekoppelte Systeme (z.B. Operationsverstärker) verhalten sich bei hinreichend hoher Schleifenverstärkung A(s) gemäß A*(s)1/k(s), wobei k(s) die Übertragungsfunktion des Rückkopplungsnetzwerkes ist. Folgerung: Ist das Rückkopplungsnetzwerk ein Hochpaß, dann verhält sich das Gesamtsystem als Tiefpaß. (a) (b) Uinp Uinn Uout R2 80 A*(s)=1/k(s) 40 dB C2 0 log(f/Hz) -40 R1 -80 k(s) Bild 1.6.3.2-2: (a) Schaltung mit Rückkopplungsnetzwerk, (b) Übertragungsfunktion des Rückkopplungsnetzwerkes k(s) und der Gesamtschaltung: A*(s)1/k(s). - SC / Seite 1-29 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.7 Definition von Bel und deziBel (dB) Ein Bel ist der Logarithmus zur Basis 10 aus einem Quotienten zweier Leistungen. Gegeben sei die Signalleistung Ps und die Rauschleistung Pn. Ihr Quotient oder Signal-Rausch-Abstand (engl.: Signal to Noise Ratio, SNR) ist definiert als P SNRBel log10 s Bel. Pn (1) Das Bel erwies sich als zu grobes Maß, so daß man in zehntel Bel bzw. deziBel (dB) rechnet: P SNRdB 10 log10 s dB. Pn (2) Bezieht man diese Leistung auf einen Widerstand R, dann kann man den SNR auch als Funktion der Spannungen an oder der Ströme durch diesen Widerstand berechnen. Elektrische ist Leistung proportional zum Quadrat von Strom und Spannung: P UI U 2 / R I 2 R . (3) Gl. (3) eingesetzt in Gl. (2) liefert wegen log(x n ) n log(x ) U 2 U 2 / R U dB 10 log10 s dB 20 log10 s dB SNRdB 10 log10 s2 Un Un / R Un oder I 2 I 2R I SNRdB 10 log10 s2 dB 10 log10 s dB 20 log10 s dB In In In R Rechnet also man mit Strömen oder Spannungen, muß als Faktor die 20 anstatt der 10 vor den Logarithmus gesetzt werden. Das Ergebnis einer Rechnung darf nicht davon abhängen, ob man mit Leistungen, Strömen oder Spannungen rechnet! Beispiel: Ps=100mW, Pn=10W. Bezogen auf einen Widerstand von 40 bedeutet dies Us=2V, Un=20mV oder Is=50mA, In=500A. Man erhält den Signal-Rausch-Abstand als Quotient von Leistungen: 100mW SNRdB 10 log10 dB 10 log10 10000 dB 10 4 dB 40dB 0,01mW Quotient von Spannungen: 2V SNRdB 20 log10 dB 20 log10 100 dB 20 2 dB 40dB 20mV Quotient von Strömen: 50mA dB 20 log10 100dB 20 2 dB 40dB SNRdB 20 log10 500A - SC / Seite 1-30 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.8 Die vier Axiome der Signalverarbeitung Da wir Schaltungen in erster Linie für die Signalverarbeitung konstruieren, ist es nützlich, einige dort geltende Grundregeln zu kennen. 1.8.1 Zeitvarianz und Zeitinvarianz Ein System ist zeitinvariant , wenn dessen Impulsantwort h(t) gleich jeder zeitlich verschobenen Impulsantwort h(t-) ist. Bild 1.8.1-1: Schwingkreis mit Varaktordiode Uin L Ck1 Cv Ck2 Uout Usteuer Bild 1.8.1-1 zeigt einen Schwingkreis mit einer Varaktordiode Cv, deren Kapazität sich mit der Spannung Usteuer unentwegt ändert. Das System in Bild 1.8.1-1 ist nicht zeitinvariant, da sich die Steuerspannung Usteuer(t) laufend ändert und man sich nicht darauf verlassen kann, dass h(t-)=h(t-) ist. Bild 1.8.1-2: Radarstation mit Sende- / Empfangsantenne a*(t) b*h(t-) b*(t-) H Bild 1.8.1-2 zeigt eine Radarstation, deren Antenne einen Impuls (t) aussendet und dessen Reflexion r(t) anschließend empfängt. Nach dem Empfangsverstärker soll das gleiche Objekt unabhängig von seiner Entfernung zur Antenne gleich große Impulsantworten h(t-τ) liefern. Dürfen wir den Empfangsverstärker als zeitinvariantes System behandeln? Nein! Denn mit zunehmender Entfernung des Objekts kommt die Impulsantwort schwächer. während Der des des Radarsignals Empfangsverstärker Wartens vergrößern sowohl später muss seine und ist zeitinvariant sondern zeitvariant. - SC / Seite 1-31 - als auch Verstärkung daher nicht Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.8.2 Linearität (a) x1(t) (b) c1 x1(t) H x2(t) H c1 y(t) y(t) H x2(t) c2 c2 Bild 1.8.2-1: (a) lineare Überlagerung zweier Signale, (b) äquivalentes System. Bild 1.8.2-1(b) zeigt ein System, welches die rechte Seite der Gleichung des Linearitätsprinzips grafisch veranschaulicht: y[ c1x1(t) + c2x2(t) ] = c1y[x1(t)] + c2y[x2(t)]. (a) x(t) (b) c H y(t) x(t) H c y(t) Bild 1.8.2-2: (a) Anregung eines Systems mit cx(t), (b) äquivalentes System. Linearität beinhaltet Proportionalität: Bild 1.8.2-2(b) zeigt ein System, welches die Gleichung des Proportionalitätsprinzips grafisch veranschaulicht: y[ c·x(t) ] = c · y[ x(t) ]. Die Skalierung eines Signals mit einem Konstanten Faktor darf über ein System verschoben werden. (a) U1 (b) R1 R2 R1 U1 R2 Uoff U2 U2 Bild 1.8.2-3: (a) Resistiver Spannungsteiler, (b) invertierender Verstärker mit OP. Proportionalität beinhaltet Offset-Freiheit: Aus x(t)=0 folgt y(t)=0. (Nicht verwechseln: Für einen Mathematiker ist ein System linear, wenn Geraden in Geraden abgebildet werden.) System in Bild 1.8.2-3(a) ist linear, weil U2 = konstant * U1 System in Bild 1.8.2-3(b) ist nichtlinear, weil U20 wenn U1=0. - SC / Seite 1-32 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg Anmerkung zur Linearität: Oben definierte Linearität gilt für die Signalverarbeitung. Hier ist es nützlich mit Hilfe der Proportionalität alle konstanten Skalierungen in einem System zu einer einzigen Skalierung zusammenzufassen. Für einen Mathematiker ist ein Offset keine Störung der Linearität. 1.8.3 Kausalität Kausalität ist definiert als y(t) = f[x()] mit t. Das bedeutet: Ein kausales System kann nur auf die Gegenwart und die Vergangenheit reagieren, nicht aber auf die Zukunft, es kann also keine "hellseherischen" Fähigkeiten besitzen. Beispiele für ein nicht kausale Systeme, die wir in der Signalverarbeitung oft gerne hätten: idealer Tiefpass, idealer Bandpass, idealer Hochpass. 1.8.4 Stabilität Bei der Stabilität redet man von der sogenannten BIBO-Stabilität: Es gibt ein konstantes K, so dass für |x(t)|M garantiert werden kann |y[x(t)]| KM. Das Akronym "BIBO" steht für Bounded Input Bounded Output Ist ein idealer Integrator BIBO-stabil? Nein, für f->0 Ausgangsgröße (z.B. konstantes beliebig groß Eingangssignal) werden, auch kann seine wenn das Eingangssignal bestimmte Grenzwerte nicht überschreitet. PS: Anmerkung zum LZI-System: In der deutschsprachigen Literatur findet man häufig den Ausdruck LZI-System, welcher für „lineares und zeitinvariantes System“ steht. In der angelsächsischen Schreibweise findet man das Akronym LTI für „linear and time-invariant“. - SC / Seite 1-33 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.8.5 Anwendung der LZI-Eigenschaften <optional> (a) (a) Sprungfunktion (t) (t) 1 0 (b) t T1 t (t) A1 (b) Rechteckfunktion (t) T1 Bild 1.8.5 0 1 Bildteil (a): Einheitssprung (t ) 0 für t0 A , Bildteil (b): (t ) sonst 0 für 0 t T1 sonst (t) kann mathematisch durch lineare Verknüpfungen und Skalierungen von (t) dargestellt werden: als (t) = A ( (t) - (t-T1) ). Der Ausgang eines RC-Tiefpasses mit der Zeitkonstanten =RC reagiert auf die Eingangsfunktionen (t) bzw. (t-T1) mit 0 f1(t)=y[(t)]= t / 1 e 0 für t 0 , bzw. mit f2(t)= y[-(t-T1)] = (T1 t ) / 1 für t 0 e für t T1 für t T1 . Obiger RC-Tiefpass reagiert dann auf die Eingangsfunktion (t) mit der Summenantwort 0 y[A·1-A·2] = A·y(1) – A·y(2) = A·f1(t) – A·f2(t) = A(1 e t / ) A(e T1 / 1)e t / für t0 für 0 t T1 für t T1 Die Impulsantwort h(t) des Tiefpasses kann auf 2 Wegen ermittelt werden: (a) Als Antwort y(t) auf den Puls (t) mit Fläche 1 (i.e. A=1/T1) und T1→0. Für t≥T1: 1 T1 T2 T3 T2 e t / 1 T1 / 1 T 1 0 e 1 e t / 1 1 1 2 1 3 ... 1e t / 1 2 1 3 ... e t / T T1 T1 1! 2! 3! 3! 2! (b) Als Ableitung der Einheitssprung-Antwort: h(t ) df1 (t , A 1) 0 1 t / e dt - SC / Seite 1-34 - für t 0 für t 0 . Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.8.6 Zusammenhang von Impuls- und Sprungantwort bei LZI-Systemen: Die linearen Operationen „Integration über die Zeitachse“ (beziehungseise 1/s im FrequenzBereich) und „LZI-System mit Impulsantwort h(t)“ (beziehungsweise Übertragungsfunktion H(s) im Frequenz-Bereich) dürfen vertauscht werden. Da der Sprung das Integral des Impulses ist, muss die Sprungantwort eines linearen Systems das Integral der Impulsantwort sein, wie das Bild unten verdeutlicht. (a) (c) (t-a) (t-a) (t-a) (t-a) Impuls 0 (b) a Sprung Sprungantwort (d) 1 (t-a) (t-a) Impuls a g(t-a) t (t-a) = (t-a)dt 0 h(t) h(t-a) h(t) Impulsantwort g(t-a) Sprungantwort t Bild 1.8.6: Vertauschung von „LZI-System mit Impulsantwort h(t) bzw. Übertragungsfunktion H(s)“ und „Integration über die Zeitachse bzw. 1/s“ erlaubt. Folglich ist die Sprungantwort das Integral der Impulsantwort. Anmerkung: Die Übertragungsfunktion H(s) eines LZI-Systems ist die laplace-Transformierte der Impulsantwort h(t). - SC / Seite 1-35 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.9 Schaltkreisanalyse: Techniken und Werkzeuge In diesem Unterkapitel werden Schaltkreisanalysemethoden wie Berechnung den des Arbeitspunktes, DC-, AC- und Transienten-Analyse erläutert. Begriffe wie Groß- und Kleinsignal-Größen lassen sich am besten mit Hilfe praktischer Beispiele erläutern. Um diese mit ASCII-Text beschreiben zu können verwenden wir unten die Eingabesprache des analogen Schaltkreissimulators Spice. 1.9.1 Einfachste Grundlagen einer Spice - Schaltungsbeschreibung Das Schaltkreis-Analyseprogramm Spice [1] (Simulation Program with Integrated Circuit Emphasis) zur Simulation analoger Schaltungen wurde von der University of California, Berkeley (UCB) entwickelt und 1973 erstmals öffentlich vorgestellt. Dabei wurde die zu simulierende Schaltung mit einer ASCII-Textdatei (Spice Input Deck) beschrieben, deren Syntax aller Kritik zum Trotz bis heute ein De-facto-Standard ist. Diese weltweite „Normung“ ohne formale Norm ist nach wie vor für nahezu alle Spice - artigen Programme Schnittstelle zwischen Schaltkreiseingabe-Editoren (Schematics Entry) und dem Simulationskern. Dieser ist als C-Programm bei der UCB vom Internet ladbar. Hier werden nur die für dieses Skript benötigten Anweisungen und Funktionen erläutert. Listing 1.9.1: Beispiel für eine textuelle Spice - Eingabedatei (Spice Input Deck) Die erste Zeile in einem Spice Input Deck ist IMMER Kommentar * Eine Zeile mit einem * in der ersten Spalte ist eine Kommentarzeile * Text, der einem Semikolon ';' folgt, ist Kommentar * Spice unterscheidet nicht zwischen Groß- und Klein-Buchstaben * * Schaltungsknoten werden mit Nummern oder Strings beschriftet. * Der Schaltungsknoten 0 ist prinzipiell Masse, 0V * * Eine Zeile beschreibt ein Bauelement oder eine Steueranweisung * Ein Bauelement wird durch seinen Anfangsbuchstaben festgelegt, z.B. Vin * Eine Steueranweisung beginnt mit einem Punkt, beispielsweise .OP * * Beschreibung der Testumgebung Vin 1 0 DC 3V AC 1V SIN(1V 2V 1KHz); transient: Vin=1V+2Vˑsin(2πˑ1Khzˑt) * Vxxx: unabh. Spannungsquelle, String "DC" ist default und optional * Knoten sind mit Nummern nummeriert, Knoten 0 liegt immer auf 0V * R L C * * * Testschaltung: RLC-Tiefpass 1 2 10K ; von 10Kilo-Ohm, 2 3 22nH; Induktivität zwischen Knoten 2 und 3 von 22nH 3 0 10uF; Kapazität zwischen den Knoten 3 und 0 von 10 Mikrofarad Um welches Bauelementenamens es sich handelt entscheidet in Initiale Dimensionen wie V, A, H, F dürfen weggelassen werden Skalierungsfaktoren sind u.a.: m, u, n, p, K, MEG, G * Analysen: Steueranweisungen beginnen mit einem Punkt .OP .DC Vin 0 5 0.25; bedeutet: Vin = 0 – 5V, Schrittweite 1V .AC DEC 20 1Hz 10KHz; f-Achse gem. LOG10, 20 Punkte/Dekade von 1Hz-10KHz .TRAN 10ns 5ms; transiente Simulation mit t10ns, von 0-5ms. Übung: Zeichnen Sie die Schaltung, die mit Listing 1 definiert wird. - SC / Seite 1-36 - Prof. Dr. M. Schubert Schaltungstechnik V(1,2) (a) 1 R V(2,3) 2 Ostbayerische TH Regensburg V(1,2) (b) V(2,3)=0 1 3 2 R 3 L Vin Vin V(3,0) C V(3) 0 0 Bild 1.9.1: (a) Schaltung gemäß Listing 1.9.1, (b) reduziert für Analysen .OP und .DC 1.9.2 Analysen Bild 1.9.2 zeigt einen npn-Bipolartransistor mit einer Strom- und einer Spannungsquelle. Knoten 0 ist immer Masse, die Knoten n1 und n2 wurden mit Labeln statt mit Nummern bezeichnet. Die Analysen .OP und .DC berechnen Großsignallösungen mit Kapazitäten als Unterbrechungen .TRAN berechnet Großsignalmodelle gemäß Bildteil (a) über der Zeitachse, .AC berechnet Kleinsignale gemäß Bildteil (b) über der Frequenzachse (Bode-Diagramm). Listing 1.9.2: Beispiel für eine Spice-Eingabedatei mit 1 Bipolartransistor und 2 Quellen. Test eines Bipolartransistors * Testumgebung IB 0 n1 DC 1uA AC 1mA SIN(10uA 1uA 1KHz); VCE n2 0 DC 5V AC 1V; * DUT (Device Under Test): Bipolartransistor Q n2 n1 0 BCY200; = Transistorname C B E Modellname .MODEL BCY200 NPN(BF=200 CJC=20pF CJE=20pF IS=1E-16) * nicht genannte Modellparameter werden auf Default-Werte gesetzt * Analysen .DC VCE 0 5V 0.1V IB 0 50uA 10uA; geschachtelte Schleife .AC DEC 20 1Hz 10KHz; f-Achse gem. LOG10, 20 Punkte/Dekade von 1Hz-10KHz .TRAN 10ns 5ms; Transiente Simulation, t10ns, von 0-5ms. (a) (a) n2 CBC CCE n2 n1 IB VCE CBE iB CBE rBE Q 0 rCE n1 gm uBE CBC CCE 0 Bild 1.9.2: (a) Schaltung gemäß Listing 1.9.2 für .TRAN - Analyse, (b) für .AC-Analyse - SC / Seite 1-37 - vCE Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.9.2.1 .OP: Arbeitspunkt- (engl. Operating Point) Berechnung Die .OP-Anweisung berechnet die Großsignal-Spannungen und Ströme zum Zeitpunkt t=0. Im Arbeitspunkt werden nur die DC-Spannungen zum Zeitpunkt 0 betrachtet und alle Knotenspannungen und Zweigströme mit Großsignalmodellen berechnet. Eine Graphik kann nicht angefertigt werden, da sie nur einen Punkt enthalten würde. Bei der OP-Analyse sind Kapazitäten Unterbrechungen und Induktivitäten Kurzschlüsse. Großsignal-Berechnung bedeutet, dass für nichtlineare Bauelemente auch nichtlineare Gleichungssysteme gelöst werden müssen. Beispiel für eine Großsignalrechnung: 1 Für die Masche in Bild 1.9.2.1 gilt UR+UD–Vq=0 UR=Vq-UD. Mit nUuD IR= UR/R und I D I S e T 1 ergibt sich aus ID=IR die nichtlineare Gleichung nUuD Vq U D , die nach in UD gelöst werden muss. I S e T 1 R R Vq UR 2 D UD 0 Bild 1.9.2.1: Masche mit Diode als nichtlinearem Bauelement. 1.9.2.2 .DC: Statische Großsignal-Analyse Die DC-Analyse berechnet das Großsignalverhalten über der Abszisse Strom o. Spannung. Eine DC-Analyse ist eine Reihe von OP-Analysen, bei denen 1 oder 2 DC-Spannungen schrittweise verändert werden. Dies eignet sich beispielsweise für die Berechnung des Kennlinienfeldes eines Transistors gemäß Bild 1.9.2(a). Bei der .OP und .DC-Analyse sind Kapazitäten Unterbrechungen und Induktivitäten Kurzschlüsse. Die Steueranweisung .DC VCE 0 5V 0.1V; löste eine DC-Simulation aus, bei der VCE von 0V bis 5V in Schritten von 0.1V durchlaufen wird. Die Steueranweisung .DC VCE 0 5V 0.1V IB 0 50uA 10uA; geschachtelte Schleife fügt eine äußere Schleife hinzu, bei welcher der Strom IB von 0-50μA in Schritten von 10μA verändert wird. Steueranweisung sind so aufgebaut, dass die wichtigsten Parameter zuerst genannt werden, so dass man möglichst viele weglassen kann. Für diese werden dann Default-Werte eingesetzt. - SC / Seite 1-38 - Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.9.2.3 .TRAN: Dynamische Großsignal-, Zeitbereichs- (engl. Time Domain) Analyse Die Transienten-Analyse berechnet das Großsignalverhalten der über der Zeitachse. Das Wort transient kommt vom lateinischen trans-ire = (hin)über-gehen. (Deutsch und englisch steht „Transit...“ für „Durchgangs..., Übergangs...“.) Transienten sind typischerweise Einschwingvorgänge, z.B. das Einschwingverhalten einer Schaltung nach dem Umschalten einer anregenden Frequenz. Im eingeschwungenen Zustand nutzt man die AC-Analyse. Voraussetzung als Startpunkt einer Transientenanalyse ist die Ermittlung des Arbeitspunktes. Er wird automatisch berechnet, auch wenn man keine OP-Anweisung gesetzt hat. Die Spice-Anweisung IB 0 n1 DC 1uA AC 1V SIN(10uA 1uA 1KHz); Sagt aus, dass die Stromquelle (weil Initiale I) bei der Arbeitspunktberechnung den DC-Wert 10μA verwendet in der .AC-Analyse als Quelle 1 V und bei der Transientenanalyse einen sinusförmigen Strom mit Offset 10 μA, Amplitude 1 μA und 1 KHz Frequenz. 1.9.2.4 .AC: Kleinsignal-, Frequenzbereichs- (engl. Frequency Domain) Analyse Die AC-Analyse berechnet das Kleinsignalverhalten der Schaltung über der Frequenzachse. Sie ist auch als Bode-Diagramm bekannt. Als erstes wird mit den DC-Größen der Spannungsquellen mit den nichtlinearen Modellen ein Arbeitspunkt berechnet,. Dann wird die Schaltung im Arbeitspunkt liniearisiert, indem man im OP die Kleinsignalparameter ermittelt, zum Beispiel rCE=dUCE/dIC. Anschließend werden die Bauelemente wie in Bild 1.9.2(b) durch entsprechende Kleinsignalmodelle ersetzt. Arbeitspunkt-Spannungen und –Ströme werden auf Null gesetzt. In einer linearen Schaltung verursacht eine sinusförmige Anregung nach Abklingen der Transienten sinusförmige Spannungen und Ströme gleicher Frequenz. Das Verhältnis von Eingangsspannung zu Ausgangsspannung(en) kann als Amplitudenverhältnis (Amplitudengang) und Phasenverschiebung (Phasengang) angegeben werden. Die Spice-Anweisung Vxxx ... AC Amplitude phi Bezieht sich auf die Formel Uout(jω) = H(jω) Uin(jω), wobei Uin(jω) = Amplitudeej(ωt+phi) ist. Der Anfangswinkel phi wird typischerweise weggelassen, sein Defaultwert ist 0. Die Frequenzpunkte der Abszisse werden in der .AC - Steueranweisung festgelegt. Als Amplitude gibt man bei Spannungen typischerweise 1V ein, weil dann alle anderen Spannungswerte gleich der Verstärkung sind. Ob der Ausgangswert die real erreichbare Maximalspannung überschreitet ist dabei irrelevant. Das Model ist linearisiert und berechnet problemlos 200KV Ausgangsspannung bei einer Betriebsspannung von 3V. - SC / Seite 1-39 - Ck2 CE CBC VCC Circuit Analysis Techniques Spice: .TRAN Ugen(t) transient, time domain, arbitrary input rCE LC CCE RC Ck2 Rk1 Ugen Rk1 R2 R1 R1 static RC Q RE rm VCC gm uBE Q RE Spice: .OP: operating point .DC: abscissa is Voltage or Current rCE RC Spice: .TF (transfer function), frequency = 0 R2 0V 0V - SC / Seite 1-40 - RC Q RE rm gm uBE CBE Q CE ugen Rload dynamic R2 R1 R2 RE Rgen Rgen Ck1 Rk1 Ugen 0V Rload Spice: .AC, frequency domain <=> steady-state sinusoidal wave Ck1 Rk1 R1 0V Rload Rgen ugen Rload LARGE SIGNAL small signal Ostbayerische TH Regensburg Schaltungstechnik Prof. Dr. M. Schubert Rgen Prof. Dr. M. Schubert Schaltungstechnik Ostbayerische TH Regensburg 1.10 Referenzen [1] UC Berkeley; http://bwrcs.eecs.berkeley.edu/Classes/IcBook/SPICE/ [2] Spice 3 User’s Manual, https://newton.ex.ac.uk/teaching/CDHW/Electronics2/userguide/ [3] Spice tutorial 1.3.0 documentation, http://vision.lakeheadu.ca/eng4136/spice/index.html# - SC / Seite 1-41 -