III Energie
Werbung

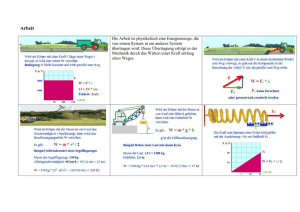
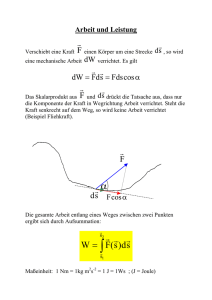
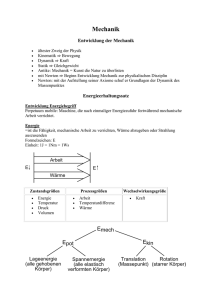
KAPITEL III ENERGIE 1. MECHANISCHE ENERGIE Wird ein Körper mit der Kraft F entlang des Weges s bewegt, so ist die dafür benötigte mechanische Energie E das skalare Produkt aus der Kraft F und dem Weg s : E F s F s cos F und s sind in dieser Definition die absoluten Beträge von Kraft und Weg, ist der Winkel zwischen den Vektoren F und s . Die Energie ist eine abgeleitete skalare Größe. Ihre Einheit ist Joule (J). Es gilt : 1 J = 1 Nm . Die Vektoreneigenschaft von Kraft und Weg ist die Ursache dafür, dass die mechanische Energie positiv, negativ oder null sein kann : F Fs s Für 0 90 ist cos 0 . Die Kraftkomponente FS F cos zeigt in Richtung des Weges. Also ist E 0. F Fs Für 90 180 ist cos 0 . Die Kraftkomponente FS F cos zeigt in entgegengesetzte Richtung des Weges. Also ist E 0 . s F s Für 90 ist cos 0 . Die Kraftkomponente FS F cos ist gleich null. Also ist E 0 . Beim Tragen eines Körpers wird im physikalischen Sinn keine Energie übertragen. Im Diagramm F = f (s) wird die Energie grafisch durch die Fläche unterhalb der Kurve dargestellt. F F F = f(s) Fs F = const. E = Fs s 0 s Kraft ist konstant längs des Weges s E F ( s) ds 0 0 s Kraft ist veränderlich längs des Weges. Die mechanische Energie ist dann das sogenannte Wegintegral der Kraft. ENERGIE 2 2. MECHANISCHE ENERGIEARTEN 2.1 KINETISCHE ENERGIE Ein Körper der Masse m wird durch die konstante Kraft F in Richtung des Weges aus der Ruhe (vA=0) auf die Geschwindigkeit vE = v beschleunigt, wobei von Reibung abgesehen werde. Auf waagerechter Strecke wird für diesen Beschleunigungsvorgang mechanische Energie benötigt. F F s vA 0 vE v Wegen der gleichen Richtung von Kraft und Weg gilt : E F s cos E F s 0 cos 1 Wird die Beschleunigung mit konstanter Kraft durchgeführt, so gelten neben der Grundgleichung der Mechanik auch die Gesetze der gleichmäßig beschleunigten Bewegung aus der Ruhe heraus. Damit ergibt sich für die für den Beschleunigungsvorgang nötige mechanische Energie : E E F s F ma m a 12 a t 2 1 2 m a t 1 2 m v2 2 und s 12 a t 2 v at Die beim Vorgang zugeführte mechanische Energie ist demnach allein durch die Endgeschwindigkeit v und die Masse m des beschleunigten Körpers bestimmt. Der Term E 12 mv2 heißt kinetische Energie Ekin . Die kinetische Energie eines Körpers der Masse m der sich mit der Geschwindigkeit v bewegt ist Ekin 1 2 mv2 Diese Energie ist im Körper gespeichert. Dieser Term für die kinetische Energie ergibt sich auch, wenn die Beschleunigung nicht mit konstanter Kraft erfolgt. 2.2 POTENTIELLE ENERGIE IM GRAVITATIONSFELD Auf der Erde wirkt auf einen Körper der Masse m die Gewichtskraft G m g . Um einen Körper lotgerecht zu heben ist die entgegegesetzte Kraft F G mit dem Betrag F G nötig. Die Kräfte F und G kompensieren sich, so dass die Geschwindigkeit und die kinetische Energie nicht ändern. ENERGIE 3 F Epot=mgh h s G F E=mgh Epot=0 h=0 G Die Energie E allein für das Hochheben um die Höhe h ist : E Fs E F s cos Da die äußere Kraft F und der Weg s parallel und gleichgerichtet sind, ist 0 und cos 1 . Es folgt : F G mg E F s sh E mg h Der Körper besitzt dann gegenüber seinem Ausgangspunkt sogenannte Lageenergie oder potentielle Energie Epot . Diese ist gleich der zum Heben des Körpers notwendige Energie E, wenn man dem Körper auf der Höhe h=0 die potentielle Energie Epot=0 zuordnet. Die potentielle Energie eines Körpers gegenüber der Höhe h = 0 ist E pot m g h Um den Betrag der potentiellen Energie eindeutig angeben zu können, muss ein Bezugsniveau oder Nullniveau ( h=0 ) festgelegt werden. Für dieses Nullniveau gilt dann auch Epot=0 . Das Nullniveau kann beliebig gewählt werden, daher ist es unmöglich absolute Werte der potentiellen Energie anzugeben. Es hat nur einen Sinn, von der Differenz der potentiellen Energie für zwei verschiedene Orte zu sprechen. Für die Höhe h und daher auch für die potentielle Energie Epot können sowohl positive als auch negative Werte auftreten : für Orte über dem Nullniveau gilt : h > 0 und Epot > 0 , für Orte unterhalb des Nullniveaus gilt : h > 0 und Epot > 0 . Die Speicherung von Energie unter Form von potentieller Energie ist nur möglich, weil zwischen Körper und Erde die Gravitationskraft wirkt. Erde mit Gravitationskraft und Körper bilden ein System. In diesem System Erde-Körper, nicht aber im Körper, ist die potentielle Energie gespeichert. ENERGIE 4 2.3 SPANNENERGIE ODER POTENTIELLE FEDERENERGIE s=0 s Die Kraft F zum Spannen der Feder ist in jedem Moment gleich groß und entgegengesetzt der Federkraft FF F FF Nach dem Gesetz von Hooke gilt FF D s und demnach F Ds Wird die Feder aus dem entspannten Zustand s = 0 um die Strecke s gespannt, so wächst die Kraft F proportional zum Weg s . Die zum Spannen nötige Energie wird im Diagramm der Kraft in Funktion des Weges durch die Fläche des Dreiecks unter der Geraden F D s dargestellt. Es gilt : FF s FF F F=Ds E E E E F 0 s s A F s 2 Dss 2 1 D s2 2 F Ds Die in dem System Feder-Körper gespeicherte Spannenergie ist ebenfalls eine potentielle Energie, da zwischen der Feder und dem Körper die anziehende Federkraft wirkt. Die Spannenergie oder potentielle Federenergie einer Feder mit der Federkonstanten D, die vom entspannten Zustand um die Strecke s gedehnt wird beträgt E 12 D s 2 2.4 ENERGIEÜBERTRAGUNG BEI REIBUNG In der Wirklichkeit laufen die meisten Bewegungen nicht ohne Reibung ab. Alle Reibungsvorgänge machen sich durch eine Temperaturerhöhung der beteiligten Körper bemerkbar. Um die Temperatur eines Körpers zu erhöhen, ist Energie nötig, die als sogenannte thermische Energie in den an der Reibung beteiligten Körpern enthalten ist. Wird ein Körper mit konstanter Geschwindigkeit über eine horizontale Ebene geschoben, so muss aufgrund der Reibung zwischen Körper und Unterlage auf den Körper eine Kraft F wirken, welche die entgegengesetzt gerichtete Reibungskraft FR kompensiert : mit dem Betrag F FR F FR Da die äußere Kraft F und der Weg s parallel und gleichgerichtet sind, ist 0 und cos 1 . Daher folgt für die Energie E F s E FR s Wird ein Körper mit der Kraft F mit konstanter Geschwindigkeit entlang des Weges s gegen die Reibungskraft FR bewegt, so ist die dazu nötige Energie ER FR s Diese Energie wird in Wärmeenergie oder thermische Energie Q umgewandelt und fließt in die am Reibungsvorgang beteiligten Körper. Es gilt Q = ER . ENERGIE 5 3. ENERGIEERHALTUNG Eine grundlegende Erkenntnis der Physik lautet: Energie kann weder erzeugt noch vernichtet werden. Gleichwertig mit dieser Aussage ist der Satz von der Erhaltung der Energie, der in sogenannten abgeschlossenen Systemen gilt. Abgeschlossene Systeme sind Anordnungen von Körpern, auf die keine Kräfte von Körpern außerhalb dieser Anordnung wirken. Die Energie eines mechanischen Systems tritt in den einzelnen Zuständen in wechselnden Beträgen als kinetische Energie und als potentielle Energie, also als Lageenergie bzw. als Spannenergie auf. Mechanische Energie kann von einer Form in eine andere umgewandelt werden. Wird von Energieverlusten durch Reibungsvorgänge abgesehen, so ist bei Vorgängen in abgeschlossenen Systemen die Summe aus kinetischer und potentieller Energie konstant oder anders formuliert: Die Summe der mechanischen Energie bleibt erhalten. Erhaltungssatz der Mechanik : In einem abgeschlossenen System ist zu jedem Zeitpunkt die Summe der mechanischen Energien, d.h. die Summe aus kinetischer und potentieller Energie, konstant, solange die Vorgänge im System reibungsfrei ablaufen: Ekin t E pot t E t konst. Nach diesem Satz gibt es für ein abgeschlossenes System ohne Reibung eine Erhaltungsgröße, die mechanische Energie. Beim Lösen von Aufgaben emphielt es sich den Erhaltungssatz der mechanischen Energie unter folgender Form anzuschreiben : E E Anfang E pot , A Ekin, A ES , A Ende E pot , E Ekin , E ES , E Meistens sind am Anfang und am Ende der Energieumwandlungen einige mechanische Energiearten gleich null, so dass sich der Erhaltungssatz weiter vereinfachen lässt reduzierter Energieerhaltungssatz. Der verallgemeinerte Energieerhaltungssatz, der außer der potentiellen und der kinetischen Energie alle anderen auch nicht mechanischen Energieformen umfasst, gilt für alle abgeschlossenen physikalischen Systeme. Er ist neben dem Impulserhaltungssatz das zweite Fundamentalprinzip der Physik. Der verallgemeinerte Energierhaltungssatz erlaubt es auch solche mechanischen Vorgänge zu berechnen, bei denen Reibung auftritt. Bei Reibung ist die Summe aller mechanischen Energiearten am Ende kleiner als diese Summe aller mechanischen Energiearten am Anfang der Energieumwandlung. Die Energiedifferenz entspricht der durch Reibung erzeugten und in den Körpern gespeicherten Wärmeenergie Q. Es gilt also in diesem Fall : E Anfang Q bzw. ER E E Ende Q Anfang E Ende ENERGIE 6 4. STOSSVORGÄNGE UND ENERGIEERHALTUNG Üben zwei oder mehrere Körper kurzzeitig Kräfte aufeinander aus, so wird dieses Ereignis als Stoß bezeichnet. Ein Stoß ist z.B. die Kollision zweier Billardkugeln oder der Zusammenprall zweier Fahrzeuge. Alle Stoßvorgänge lassen sich ohne Kenntnis dessen was beim Stoß im Einzelnen vor sich geht, allein durch die beiden Erhaltungssätze für den Impuls und die Energie genau beschreiben, wenn gewährleistet ist, dass es sich um abgeschlossene Systeme handelt. Ein Stoß zwischen Körpern setzt die Bewegung mindestens eines Körpers voraus, d.h es existiert kinetische Energie. Man unterscheidet elastische und unelastische Stöße. Bei einem elastischen Stoß bleibt die kinetische Energie erhalten. Bei einem unelastischen Stoß gilt der Energierhaltungssatz der Mechanik nicht. Die Energiedifferenz E zwischen der Summe der kinetischen Energien Ekin vor dem Stoß und der Summe der kinetischen Energien E’kin nach dem Stoß wird in Wärmeenergie umgewandelt, die als thermische Energie in den am Stoß beteiligten Körpern gespeichert ' wird. Beim unelastischen Stoß gilt also : E Q Ekin Ekin . Bei allen Stoßvorgängen, egal ob elastisch oder unelastisch, bleibt der Impuls stets erhalten. Bei einem vollkommen unelastischen Stoß bewegen sich beide Körper nach dem Stoß gemeinsam weiter. 5. LEISTUNG - ENERGIESTROM Bei vielen Anwendungen ist es wichtig zu wissen, welcher Energiebetrag E in einer bestimmten Zeit t einem System zugeführt bzw. entzogen wird. Der Quotient E/t ist ein Maß für diesen Energiestrom, man bezeichnet diesen Quotienten als Leistung. Der Energiestrom oder die Leistung P ist der Quotient aus der zugeführten Energie E und der Zeit t , in der dies geschieht : P E t Die Einheit der Leistung ist 1 Watt. 1 W = 1 J/s Der Zusammenhang zwischen der Leistung und der Kraft wird ersichtlich, wenn wir die oben stehende Formel umwandeln : P P P E t F s t E F s s v t F v Wird ein Körper unter der Einwirkung einer Kraft F mit der Geschwindigkeit v bewegt, so ist bei diesem Vorgang die Leistung gegeben durch : P F v ENERGIE 7