Skript der Vorlesung
Werbung

Modeling and Data Analysis of Complex Systems
Markus Abel
Udo Schwarz, Karsten Ahnert, Carolina Figueras
8th May 2009
Contents
I
1. Vorlesung: Organisation und Motivation
2
1 Organisatorisches
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
3
2 Ziel der Vorlesung
3
3 Komplexe Systeme
3
4 Modellierung komplexer Systeme
4
5 Modellierung und Datenalyse komplexer Systeme
6
6 Komplexe Systeme
7
7 Dynamische Systeme
7
8 Übung: Einführung in R
9
II
Zufallsvariablen
10
9 Eine Zufallsvariable
9.1 Wahrscheinlichkeitsdichte . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Mittelwerte und Momente . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Die charakteristische Funktion und die Kumulanten . . . . . . . . . . . . . .
1
10
10
11
11
10 Mehrdimensionale Zufallsvariablen
10.1 Wahrscheinlichkeitsdichte, charakteristische Funktion . . . . . . . . . . . . .
10.2 Summe der Zufallsvariablen, Zentraler Grenzsatz . . . . . . . . . . . . . . .
10.3 Stabile Wahrscheinlichkeitsverteilungen . . . . . . . . . . . . . . . . . . . . .
13
13
15
15
III
17
Zufallsvariablen
11 Schätzung
17
2
Part I
1. Vorlesung: Organisation und
Motivation
1
Organisatorisches
Dokumentation
Die Vorlesung wird dokumentiert
• klassich: per Mitschrift
• experimentell, da zum ersten mal: auf Video
• per Skript bzw. Kopie von Folien
• hosted von K.Ahnert: www.stat.physik.uni-potsdam.de/ kahnert/index.php?page=MDACS2009
Termine
Raum und Zeit
Do 11-12:30 Vorlesung, R. 2.28.0.104 Mo 11-12:30 Übung, Computerpool Literatur: s.
homepage
Statistik
Die Teilnehmer sind/haben ... ?
• Experimentatoren, Theoretiker?
• interessante Themen?
• Vorbildung?
• Programmierkenntnisse?
Erreichen des Vorlesungsziels
Wie üblich
gibt es Übungen und eine Klausur. An beiden muss erfolgreich teilgenommen worden sein.
Sprache
Wir bieten englisch an
Standard ist deutsch. Entscheidung nach Wunsch der Teilnehmer: Deutsch.
3
1.1
Motivation
Thema der Vorlesung
Warum soll man sich mit dem Thema beschäftigen. Wozu dient es?
• Wissenschaftlich: gute Modelle von neuen Systemen sind ein Dauerbrenner der Forschung.
Bsp.: Klima
• Industriell: Beispiel Finanzwelt
• Intellektuell: Es ist eine große Herausforderung gegebene Systeme einer Frage gemäß
zu abstrahieren und eine entsprechende Beschreibung zu finden.
2
Ziel der Vorlesung
Ziel der Vorlesung
Ziel der Vorlesung ist es, die theoretischen und technischen Kenntnisse zu vermitteln,
die nötig sind, ein komplexes System theoretisch zu analysieren, erhobene Daten statistisch/dynamisch zu verarbeiten und auf gefordertem Niveau zu modellieren.
3
Komplexe Systeme
Komplexe Systeme (gr. systema, das Gebilde,das Zusammengestellte)
• Was macht ein System komplex?
• Was ist ein System ?
• Was bedeutet komplex ?
• Wechselwirkungen vieler Komponenten
• Ein System ist eine Menge von Elementen oder Komponenten, die miteinander in
Beziehung stehen
• viele Komponenten oder nichtlineare Wechselwirkungen oder beides
Komplexe Systeme: Beispiele
• Gekoppelte Oszillatoren: Nichtlineare ODE’s
• Gekoppelte Abbildungen: Integratoren
• Fluid–Dynamik: Turbulenz, Akustik
4
• Plasmaphysik
• Astrophysik: Dynamik von N Himmelskörpern
• Physikalische Chemie: Polymere, Kolloide, Grenzflächen
• Ökonomie’: Börsencrash
• Klima, Wetter, Geodynamik
• Netzwerke: Verkehr, WWW, . . .
• Architektur von Computerprogrammen
• Populationsdynamik, Soziologie
• Biologie
4
Modellierung komplexer Systeme
Modellierung (lat. modulus,modus = Art, Weise)
Vereinfachte Beschreibung
um ein reales System zu erklären (Der Art und Weise, wie es funktioniert). Meist in mathematischer Form anhand von Gleichungen.
Modellierung
Verwirrenderweise
in verschiedenem Kontext semantisch verschieden benutzt
• Ingenieure: Nachbildung eines technischen Erzeugnisses in verkleinertem Maßstab,
auch als detailliertes Computerprogramm (im Ggs. zur Physik)
• Informatik: Abbild einer Software, bei OO z.B. mit UML
• Klima: Nachbilden z.T. unbekannter Mechanismen durch vernünftige Annahmen oder
Vergröberung
• Geschäftsprozesse: Abbild (z.T. sehr detailliert) eines Unternehmens oder einer Unternehmensidee.
• etc.
5
Modellierung: Beispiel Physikalisches Pendel
Aufgabe:
Bestimmung der Periode einer Pendeluhr, mit grober Genauigkeit
Vernünftige Annahmen
• keine Reibung
• Punktmasse
• Achse ohne Masse
• Kräftegleichgewicht
Man erhält die Gleichung für das mathematische Pendel
mlφ̈ = mg sin(φ)
pg
mit kleiner Auslenkung φ̈ + l φ = 0
(1)
Modellierung: Beispiel Physikalisches Pendel
Aufgabe:
Bestimmung der Periode einer Pendeluhr, mit hoher Genauigkeit
Vernünftige Annahmen
• keine Reibung
• Punktmasse
• Achse ohne Masse
• Kräftegleichgewicht
Man erhält die Gleichung für das physikalische Pendel
I φ̈ + kφ + f (φ, φ̇) + mgl sin(φ)
(2)
I ist das Trägheitsmoment, f eine nichtlineare Reibung.
Modellierung: Fazit
Modellierung – eine hohe Kunst
Bei der Modellierung komplexer Systeme ist es unbedingt nötig genau nachzudenken, welche
Fragen man beantworten will. Je nach Anforderung kann mehr oder weniger genau modelliert
werden. Im Falle komplexer Wechselwirkungen muss identifiziert werden, welche Komponenten für welche Effekte wichtig sind, Hierarchien oder Skalenprinzipien können erstellt
werden.
6
5
Modellierung und Datenalyse komplexer Systeme
Modellierung und Datenanalyse
Bei völlig unbekannter Funktionsweise
eines Systems und der Unterkomponenten kann man meist durch Messung Informationen
erhalten.
• Nicht alle Fragen können immer beantwortet werden
• Unmöglichkeit der direkten Messung (z.B. bei Zerstörung)
• zu lange Messungen
• zu teure Messungen
• zu komplexe Ausgabe
Modellierung und Datenanalyse
Gezielte Fragen
helfen beim Design einer Messung deren Ausgabe bzw. deren Daten (lat. datum, das
Gegebene), analysiert wird und so als Eingabe für ein Modell dient.
Bei Kenntnis oder Annahme eines Modells
bleibt immer noch die Bestimmung von Parametern, die oft qualitative und quantitative Dynamik eines Systems bestimmen. Z.B. die genaue Kenntnis einer Spannungs-Dehnungskurve
eines Werkstücks, das belastet wird.
Modellierung und Datenanalyse
Datenanalyse (gr. analein, auflösen)
bedeutet also im Rahmen dieser Vorlesung die Untersuchung von Daten, die man aus einer
Messung erhält. Die Messung wird an einem System vorgenommen, dessen Funktionsweise
man verstehen will. Mindestens möchte man eine Charakterisierung erhalten, die es ermöglicht
verschiedene Klassen von Systemen oder Parametern zu unterscheiden; bestenfalls ist das
Ergebnis ein mathematisches Modell, das Vorhersagen über den Systemzustand erlaubt.
Datenanalyse komplexer Systeme
Datenanalyse – noch eine Kunst
• direkter Zugang: Welche Daten benötige ich, um Frage XY zu beantworten?
• inverser Zugang: Welche Fragen kann man stellen, die mit vorhandenen Daten beantwortet werden können?
7
• Nicht alle Fragen können anhand gegebener Daten beantwortet werden
• Welcher Typ von Datenanalyse passt zur Fragestellung?
• Sind die Fragen mit den vorhandenen Resourcen beantwortbar (Rechner, Experimente,
Geld, Zeit)?
• Welche Information gibt es in meinen Daten?
• Wieviel Information gibt es in meinen Daten?
Datenanalyse komplexer Systeme
Empfehlung: Werte NIE Daten blind aus, d.h. ohne klare Fragestellung oder Ziele!
6
Komplexe Systeme
Komplexität
Komplexität. Lat. complectere, umfassen
Komplexität. Lat. complectere, umfassen
Beispiel
Leeres Bild - verrauschtes Bild. Keine Information - zufällige Information Komplexität kann
als globales Maß angesehen werden, das den Zustand des betrachteten Systems beschreibt.
Es gibt eine Vielzahl von Komplexitäts – Definitionen. Einige werden wir kennenlernen (und
nutzen).
Systeme
Systemtheorie
In den 20er Jahren des 20ten Jahrhunderts entstandene Betrachtungsweise von Individuen/Gruppen/Unters
als wechselwirkende Einheiten. Erstmals in der Biologie. Sehr erfolgreich in der nichtlinearen
Dynamik (Synergie)
7
Dynamische Systeme
Dynamische Systeme
Dynamik (gr. dynamos, Kraft)
Beschreibt die zeitliche Entwicklung eines Systems, in der Physik meist in Form von Gleichungen.
Dynamisches System
8
Figure 1: Interaktiv unter http : //www.art − sciencef actory.com/complexity −
mapf eb09.html.
9
Ein System, das eine zeitliche Entwicklung hat. Kommt aus der Formulierung durch Kräfteglegewicht.
Deterministische Systeme
Deterministische Systeme
Determinismus (lat. determinare, bestimmen)
Vorherbestimmtheit. Drückt aus, dass die zeitliche Entwicklung eines Systems durch Anfangszustand und Entwicklungsvorschrift vollständig vorherbestimmt ist.
Nichtlineare Systeme
können chaotisch werden. Dann ist die Bestimmung des Systemzustandes durch Genauigkeitsbetrachtungen eingeschränkt. Landläufiges Argument für Anti-determinismus: Spätestens
im Quantenbereich kann ein Zustand nicht beliebig genau angegeben werden.
Stochastische Systeme
Stochastische Systeme
Stochastik (gr. stochastiki, Vermutens)
Lehre vom Zufall, Beschreibung von zeitlichen Abläufen, die durch zufällige Ereignisse
beschrieben werden.
Stochastisches System
ein System, das neben deterministischen Termen auch Zufallsterme beinhaltet. Jede Messung
beinhaltet Zufall, nämlich über die Messgenauigkeit.
8
Übung: Einführung in R
Geschichte
Community
Wachstum
Installation
Nutzen des Internets
Packages
Dokumentation
Bücher und Tutorien
10
Part II
Zufallsvariablen
Für diese Vorlesung danke ich herzlichst Arkadi Pikovski, der sein Skript mit mir geteilt hat.
9
Eine Zufallsvariable
9.1
Wahrscheinlichkeitsdichte
Eine Zufallsvariable x wird durch
• Die Menge aller m”oglichen Werte (z.B. die Menge der Punkte der reelen Achse)
• Die Wahrscheinlichkeitsverteilung auf dieser Menge
gegeben. Die Menge kann sowohl diskret als auch kontinuierlich sein. Zuerst betrachten wir
nur skalare Zufallsvariablen.
Die Wahrscheinlichkeit wird entsprechend der Kolmogorov-Axiomatik gegeben. F”ur
jedes Ereignis A gilt P (A) ≥ 0, und f”ur verschiedene sich ausschliessende Ereignisse
X
P {A1 ∪ A2 ∪ . . . ∪ An } =
P (Ai )
Ausserdem P (∅) = 0, P (die ganze Menge) = 1.
Die Wahrscheinlichkeitsverteilung ist die Funktion W (ξ) = P rob(x ≤ ξ). Diese Funktion
nimmt nie ab und hat die Randbedingungen W (−∞) = 0, W (∞) = 1. Die WahrscheinRb
lichkeit, die Variable x in einem Interval a < x ≤ b zu finden ist W (b) − W (a) = a dW (x).
Das Integral hier ist ein Stiltjes-Integral. Man sagt, dass damit ein ein Wahrscheinlichkeitsma”s
auf der reelen Achse definiert wird. Jedes Ma”s kann in drei Komponenten zergegt werden:
1. Der kontinuierliche differenzierbare Teil dW ∼ dx. Diese Teil hat eine Dichte w(x) =
dW/dx.
2. Der diskrete Teil ergibt Spr”unge der Funktion W . Ein Sprung W (x0 + 0) − W (x0 ) = p
bedeutet, dass die Zufallsvariable den Wert x0 mit der Wahrscheinlichkeit p annimmt.
Die Dichte kann auch geschrieben werden, ist aber eine verallgemeinerte Deltafunktion:
w(x) = pδ(x − x0 ).
3. Der kontinuierliche singul”are Teil, die ein fraktales Ma”s beschreibt. Hier gilt dW ∼
(dx)γ , wobei 0 < γ < 1.
Das gesamte Ma”s kann alle drei Komponenten beinhalten.
Beispiele:
Kontinuierliche Verteilung: Alle Zahlen auf dem Interval 0 ≤ x ≤ 1 sind gleich wahrscheinlich, w(x) = 1.
11
P
Diskrete Verteilung: Die ganzen Zahlen x = 1, 2, . . . mit der Dichte w(x) = 2−n δ(x − n).
Fraktale Verteilung: Wir stellen jede Zahl 0 ≤ x ≤ 1 als einen bin”aren Bruchteil dar
x = 0, 0110100 . . ., und weisen 0 eine Wahrscheinlichkeit p und 1 die Wahrscheinlichkeit
q = 1 − p zu. Dann hat jede Menge, die durch einen eindlichen bin”aren Bruchteil dargestellt
wird, die Wahrscheinlichkeit pn q m , wobei n und m die Anzahlen von 0 und 1 sind. Das
Verh”altnis
pn q m
∆W
=
∆x
(1/2)n+m
kann jeden Wert zwischen ∞ und 0 annehmen und hat keinen Grenzwert bei ∆x → 0.
Wir werden hier immer w(x) schreiben und die Dichte als (m”oglicherweise) verallgemeinerte oder fraktale Funktion betrachten.
9.2
Mittelwerte und Momente
Der Mittelwert einer Funktion der Zufallvariable ist
Z
hf (x)i = f (x)w(x) dx
Aus dieser Definition folgt, dass die Wahrscheinlichkeitsdichte selbst als ein Mittelwert
dargestellt werden kann
Z
w(y) = hδ(y − x)i = δ(y − x)w(x) dx
Die Momente sind die Mittelwerte von Potenzen: Mm = hxm i. Das erste Moment ist
dabei der Mittelwert
M1 = hxi
F”ur den zweiten Moment M2 = hx2 i k”onnen wir schreiben
h(x − hxi)2 i = hx2 − 2xhxi + hxi2 i = M2 − M12 = D
Diese Gr”o”se heisst die Varianz.
9.3
Die charakteristische Funktion und die Kumulanten
Die Fourier-Transformation der Wahrscheinlichkeitsdichte
Z
ikx
G(k) = he i = eikx w(x) dx
ist die charakteristische Funktion. F”ur sie gilt G(0) = 1, |G(k)| ≤ 1. Nach Entwicklung der
Exponentialfunktion erhalten wir die Momente
Z X
X (ik)n
(ik)n n
x w(x) dx =
Mn
G(k) =
n!
n!
12
Aus dieser Formel folgt
Mn = (−i)n G( n)(k)
Enwickelt man ln G nach k, so erh”alt man
ln G =
∞
X
(ik)M
1
m!
κm
Man nennt κm die Kumulanten. Wir haben also zwei Darstellungen der charakteristischen
Funktion
∞
X
P∞ (ik)m
(ik)n
G(k) =
Mn = e m=1 m! κm
n!
n=0
Nach dem Vergleich
k2
ik 3
k2
M2 −
M3 . . . = eikκ1 − 2 κ2 ...
2
6
erhalten wir einen Zusammenhang zwischen Momenten und Kumulanten
1 + ikM1 −
κ1
κ2
κ3
κ4
=
=
=
=
M1
M2 − M12 = D
M3 − 3M2 M1 + 2M12
M4 − 4M3 M1 − 3M22 + 12M2 M12 − 6M14
Zur Charakterisierung von Verteilungen werden h”aufig folgende Verh”altnisse benutzt:
M̄3
M̄4
γ
=
−3
2
D3/2
D2
Hier sind M̄n die zentralen Momente M̄n = h(x − hxi)n i. γ1 heisst Schiefe und γ2 heisst
Steilheit (Kurtosis).
Beispiele.
γ1 =
1. Die Verteilung w(x) = λe−λx , x ≥ 0. Die Momente sind Mn =
λ
1/λ, D = 1/λ2 . Die charakteristische Funktion ist G(k) = λ−ik
.
n!
,
λn
so dass hxi =
2. Die Gaussische Verteilung
1
(x − hxi)2
w(x) = √
exp[−
]
2D
2πD
hat die charakteristische Funktion
G(k) = eikhxi−
k2 D
2
Die Momente sind M̄2n+1 = 0, M̄2n = 1 · 3 · · · (2n − 1)Dn . Die Schiefe und die Steilheit
sind Null.
Es gibt einen Satz: Sei die charakteristische Funktion G(k) = ePn (k) , wobei Pn ein
Polynom n-te Ordnung ist, dann n = 2. Das bedeutet, dass entweder unendlich viele
Kumulanten nicht Null sind, oder es ist eine Gaussische Verteilung.
13
3. Cauchy-Verteilung
w(x) =
1
λ
π λ2 + (x − α)2
Hier G(k) = eiαk−λ|k| . Man kann sehen, dass M1 nicht existiert, und M2 = ∞.
Betrachten wir eine Funktion der Zufallsvariable x: y = f (x). Die Wahrscheinlichkeitsdichte f”ur y ist
Z
X
wx (xi )
wy (y) = hδ(y − f (x))i = δ(y − f (x))wx (x) dx =
|f 0 (xi )|
alle Wurzeln f (x)=y
F”ur eine one-to-one Funktion man kann einfache schreiben |wx (x) dx| = wy (y) dy|.
10
10.1
Mehrdimensionale Zufallsvariablen
Wahrscheinlichkeitsdichte, charakteristische Funktion
Die Wahrscheinlichkeitsverteilung von x1 , . . . xn wird durch die Dichte w(x1 , . . . xn ) gegeben.
Ein Teil von Variablen x1 , . . . xs wird durch die Randverteilungsdichte
Z
w(x1 , . . . , xs ) = w(x1 , . . . xn ) dxs+1 . . . dxn
gegeben. Die bedingte Wahrscheinlichkeit
ws|n−s =
w(x1 , . . . xn )
w(xs+1 , . . . xn )
ist die Wahrscheinlichkeitsdichte, die Werte (x1 , . . . , xs ) zu beobachten, vorausgesetzt die
Variablen xs+1 . . . xn bestimmte Werte haben. Wenn die bedingte Wahrscheinlichkeit von
die Gruppe xs+1 , . . . xn unabh”angig ist, dann
w(x1 , . . . xn ) = w(x1 , . . . xs )w(xs+1 , . . . xn ).
Im Allgemeinen: Wenn alle Zufallsvariablen unabh”angig sind, ist die Gesamtdichte ein
Produkt von Einzelndichten:
w(x1 . . . xn ) = w1 (x1 )w2 (x2 ) . . . wn (xn )
Die Momente:
1 m2
hxm
1 x2
n
. . . xm
n i
Z
=
mn
1 m2
xm
1 x2 . . . xn w(x1 . . . xn ) dx1 . . . dxn
Die charakteristische Funktion
G(k1 , k2 , . . . kn ) = heik1 x1 +···+ikn xn i
14
Die Kumulanten
ln G =
X (ik1 )m1 (ik2 )m2 . . . (ikn )mn
m1 !m2 ! . . . mn !
mn
1 m2
hhxm
1 x2 . . . xn ii
Am wichtigsten sind die Momente und Kumulante zweiter Ordnung:
hxi xj i
hhxi xj ii = hxi xj i − hxi ihxj i = h(xi − hxi i)(xj − hxj i)i
Diese Kumulante heisst die Kovarianz. Wenn man normiert
hhxi xj ii
ρij = p
Dx Dy
bekommt man den Korrelationskoeffizient.
Wenn zwei Zufallsvariablen unabh”angig sind, dann
m1
m2
1 m2
1. hxm
1 x2 i = hx1 ihx2 i
2. G(k1 , k2 ) = G1 (k1 )G2 (k2 )
1 m2
3. hhxm
1 x2 ii = 0 wenn m1 6= 0 und m2 6= 0
Die Zufallsvariablen heissen unkorelliert, wenn ρ12 = 0.
Beispiel:
Die Wahrscheinlichkeitsdichte zweier Gaussscher Zufallsvariablen
"
##
"
1
(x − hxi)2
(x − hxi)(y − hyi) (y − hyi)2
1
p
− 2ρ
exp −
+
w(x, y) = p
2(1 − ρ2
Dx
Dy
Dx Dy
2π Dx Dy (1 − ρ2 )
ist von 5 Parametern hxi, hyi, Dx , Dy , ρ abh”angig. Wenn ρ = 0, sind die Gausssche Variablen
unabh”agig.
Im Allgemeinen definiert man f”ur mehere Gausssche Variablen die Kovarianzmatrix
σij = hhxi xj ii
und schreibt die Dichte in der Form
exp −
w(~x) =
− h~xi)σ (~x − h~xi)
p
(2π)n detσ
1
(~x
2
−1
Die charakteristische Funktion ist
1~ ~
~
G(~k) = eikh~xi− 2 kσk
Alle Momente kann man durch die Elemente der Kovarianzmatrix σ darstellen (siehe
Aufgabe 1.5).
15
10.2
Summe der Zufallsvariablen, Zentraler Grenzsatz
Finden wir die Wahrschenlichkeitsdichte der Summe von zwei Zufallsvariablen z = x + y:
Z
Z
w(z) = hδ(z − x − y)i = δ(z − x − y)w(x, y) dx dy = w(z − y, y) dy
Wenn die Variablen unabh”angig sind, dann erhalten wir die Faltung
Z
w(z) = wx (z − y)wy (y) dy
F”ur Mittelwerte gilt immer
hzi = hxi + hyi
F”ur Varianz gilt
hhz 2 ii = hhx2 ii + hhy 2 ii
nur wenn die Zufallsvariablen unkorreliert sind, ρ = 0. F”ur unabh”angige x und y gilt
Gz (k) = Gx (k)Gy (k)
Wir betrachten eine Summe von n unabh”angigen Variablen mit den Mittelwert Null
y = x1 + · · · + xn
Die Varianz ist hhy 2 ii = nhhx2 ii, deshalb normieren wir y mit
y=
x1 + · · · + xn
√
n
√
n. Dann haben wir
k
Gy (k) = [Gx ( √ )]n
n
Wir setzen jetzt
1
Gx (k) = e− 2 hhx
ein und erhalten
2 iik 2 − ik3 hhx3 ii+···
6
3
1 2
hhx2 ii− ik6 hhx3 iin−1/2
Gy (k) = e− 2 k
1 2
hhx2 ii
≈ e− 2 k
Das ergibt die Gausssche Verteilung f”ur die Summe.
Bemerkungen:
- Die Variablen xi k”onnen auch verschiedene Verteilungen haben
- Die Variablen xi k”onnen auch abh”angig sein, nur die Abh”angigkeit muss schwach sein.
10.3
Stabile Wahrscheinlichkeitsverteilungen
Betrachten wir eine Summe von unabh”angigen gleich verteilten Zufallsvariablen
s = x1 + · · · + xn
16
Wenn die Gro”se s nach der Normierung s/cn die selbe Verteilung hat wie x, dann heisst
diese Verteilung stabil. Man kann ”uberlegen, dass der Normierungskoeffizient ein Potenz
von n sein muss: cn = n1/α , 0 < α ≤ 2. Man kann auch ”aquivalent formulieren, dass
s1/α x1 + t1/α x2 und (s + t)1/α x die selbe Verteilung haben.
Die Gauss-Verteilung ist die einzige stabile Verteilung mit einer endlichen Varianz, hier
ist α = 2.
Beispiele.
Die Cauchy-Verteilung w(x) = π(λ2λ+x2 ) hat die charakteristische Funktion e−λ|k| . Diese
k
Verteilung ist stabil mit α = 1: [e−λ| n | ]n = e−λ|k| .
Die Holzmark-Verteilung. Welche Gravitationskraft erzeugt ein Sternsystem? Nehmen
wir ein Sternsystem mit der Dichte λ und betrachten die x-Komponente der Kraft im Punkt
O. Diese Komponente ist eine Zufallsvariable Xλ . Weil die Gravitationskr”afte sich addieren,
Xs + Xt und Xs+t haben die selbe Verteilung. Sei X1 die Zufallsvariable im Falle der Dichte
1. Bei Dichte t alle Abst”ande verkleinern sich um Faktor t1/3 , und die Kraft vergr”ossert
sich um Faktor t2/3 . Deshalb haben t2/3 X1 und Xt die selbe Verteilung. Wir erhalten die
Gleichung
d
s2/3 X1 + t2/3 X2 = (s + t)2/3 X
Das bedeutet, dass die Kraft die stabile Verteilung mit α = 3/2 hat.
17
Part III
Zufallsvariablen
11
Schätzung
Statistik
lat. status = Zustand
• Zustandsaufnahme einer Population durch Zählen oder Proporz
• Stichprobe: Messung eines Teils der Gesamtheit
• Experiment → Realisierung von X → N-mal = Stichprobe mit Umfang N
• Bedingung: Repräsentativ, Unabhängigkeit, etc.
• Verteilung ? Parameter ?
Wahrscheinlichkeitsraum
Ein W.-Raum
besteht aus dem Tupel {Ω, A, P } mit
• Ω eine Algebra
• A die Ergebnismenge (z.B. experimentelle Ergebnisse)
• P die zugeordneten Wahrscheinlichkeiten
Zufallsvariable
Eine Zufallvariable X
beschreibt die Zuordnung X : A 7→ p, p ∈ R. Wenn A = x ∈ R, dann ist die ZV X(x)
Schätzung
Messung einer ZVen
ergibt wieder eine ZV! Bsp.: Stichprobenmittel
N
N
1 X
1 X
¯
Xi → XN =
Xi
x¯N =
N i=1
N i=1
ist eine ZV. Wo klar, werden Indizes weggelassen.
18
(3)
Schätzung
Aussagekraft der Schätzung?
• < X̄ >= E(X̄)
• V AR(X̄)
• etc.
Erwartungsttreue Schätzung
ˆ
geschätzt: Ẑ = f (X)
Z ist erwartungstreu,
Pwenn < Z >=< Ẑ >
z.B. < X̄ >= N1 N
i=1 < Xi >=< X >
Sonstige Schätzer für mittlere Größen
• Median: halbiert eine Verteilung
• Modus: häufigster Wert
Schwankung von X̄
V AR(X̄)
V AR(X̄) =
X
1
1
V
AR(
X
)
=
V AR(X)
i
N2
N
Standardabweichung
q
σX
σX̄ = V AR(X̄) = p
V AR(X)
Achtung: Wir kennen nicht < X >, sondern nur eine (evtl. mehr) Realisierung von X̄. Also
X̄ − σX̄ ≤< X >≤ X̄ + σX̄
Der wahre MW liegt mit 68% W. im obigen Intervall
Konfidenzintervall
Konfidenzintervall zum Niveau α
Konfidenzintervall 68%
σX
σX
X̄ − √ ; X̄ + √
N
N
1 − α% -Konfidenzintervall α mit dem q1−α/2 -Quantil
σX
σX
X̄ − q1−α/2 √ ; X̄ + q1−α/2 √
N
N
19
(4)
(5)
Schwankung
Schätzung der Varianz
σX ist i.a. nicht bekannt ⇒ Schätzung
N
S2 =
1 X
(Xi − X̄)2
N − 1 i=1
(6)
X̄ aus der gleichen Stichprobe. Erwartungstreu? Berechne
2
< S 2 >= V AR(X) = σX
N − 1 konsistent mit N = 1 → < S 2 > nicht bestimmt.
Varianz
Schwankung der Schätzung
2
=< S 2 >. Verteilung von S 2 ? S 2 ist Summe von Quadraten von
Bekannt ist S 2 , nicht σX
N N0,1 verteilten Variablen
N0,1 (Standardnormalverteilung)
χ2 -Verteilung
Verteilung
P
von Y − Xi2 ?
p(xi ) = √
Z
x2
1
i
e− 2σ2
2πσ
(7)
p(Y, N ) = ?
Z
Z
X
N
dx p(x1 ...xN ) =
dy dxN δ(y −
x2i )p(x1 ...xN )
(8)
(9)
Auswertung:
Y
1
p(Y, N ) = p
Y N/2−1 e− 2σ2
N
(2σ) Γ(N/2)
(10)
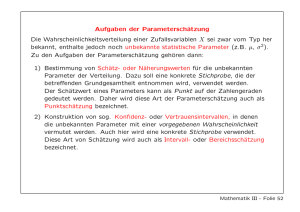
χ2 -Verteilung mit N Freiheitsgraden
chi2 − V erteilung
Zurück zu S 2 : Schätzung von V AR(S 2 )
Y =
2 (N −1)
SN
2
σX
ist χ2 verteilt mit N − 1 Fr.gr.
√
gemessen: (X̄− < X >), normalverteilt, bzw. Z =
Ersetzung σX
20
N
(X̄−
σX
< X >) ist N0,1 verteilt.
0.15
0.10
dchisq(x, df = 4)
0.05
0.00
0
2
4
6
8
10
x
Figure 2: χ2 -Verteilung mit R: dchisq(x,df). Hier df=4
Schätzung von V AR(S 2 )
Quotient
(X̄− < X >)
p
Abweichung durch M essung
2
SN
Z
= p
Y (N − 1)
(11)
(12)
Quotient N0,1 -verteilt und χ2 -verteilter Variablen → t-verteilt: pt (N −1, x). Fast wie Gauss,
wichtig für N . 32
F-Verteilung
Näheres: Übung
Für Y1 , Y2 χ2 -verteilt mit N1 − 1, N2 − 2 Freiheitsgraden ist Z =
Yi = SNi ,i )
Schätzung von V AR(S 2 )
2
Wie nahe liegt σ 2 bei SN
→ (1 − α)-Konfidenzintervall
"
X̄N −
t,N
q1−α/2
p
p #
2
SN
S2
t,N
√
; X̄N + q1−α/2 √ N
N
N
21
Y1 (N2 −1)
Y2 (N1 −1)
F-verteilt. (z.B.
0.4
0.3
0.2
dt(x, df = 4)
0.1
0.0
−4
−2
0
2
4
x
Figure 3: t-Verteilung mit R: dt(x,df). Hier der Vergleich für kleines N=4 (schwarz), großes
N=20 (rot), und Standardnormalverteilung(blau).
(σX →
√
t,N
S 2 ), q1−α/2
: 1 − α/2-Quantil der t-Verteilung
t-Verteilung
t-Verteilung
Zusammenfassung: Schätzer
ZV: Z=F(X)
Schätzung: Z̄N =
σ2
√Z
N2
1
N
PN
F (Xi ) ist ein Schätzer für < Z > und selbst eine ZV. Fehler: σZ̄2 =
q
q P
2
1
S2
2
2
2
2
Schätzung von σZ aus S ' N
F (Xi ) −Z̄ Dann ist Z̄N − q1−α/2 N ; Z̄N + q1−α/2 SN
i=1
das Interbvall, in dem mit Wahrscheinlichkeit 1 − α der wahre Wert < Z > liegt. q ist das
Quantil der F entsprechenden Verteilung.
Hypothesen und deren Tests
Hypo=gr. unter, thesis=Gesagtes: Unterstellung
Aussage, die falsifiziert oder verifiziert werden soll. Frage: Wie gut ist die Veri/Falsifizierung?
Bsp: zwei Verteilungen sind gleich! Zwei Mittelwerte sind unterschiedlich! A ist schlauer als
B!
22
Gleichheit von Mittelwerten: Test
t-Test
2
Hypothese:
< X1 >=< X2 > Betrachte Differenz ∆ = X1 − X2 und Schwankung S∆
⇒
q
N2 √∆
ist t-verteilt.
T = NN1+N
2
1
2
S∆
Verwerfen der hHypothese mitisignifikanz α
t
t
liegt. Das heisst ∆ liegt nicht in
; q1−α/2
wenn T nicht in −q1−α/2
"
r
t
−q1−α/2
t
2 N1 + N2
; q1−α/2
S∆
N1 N2
r
#
N
+
N
1
2
2
.
S∆
N1 N2
Test auf Gleichheit von Varianzen: F-Test
F-Test
Betrachte Y1 =
S12 (N1 −1)
,
σ12
Y2 =
S22 (N2 −1)
.
σ22
bilde
Y1
Y2
und untersuche die Verteilung. Es ergibt
sich die F-Verteilung und daraus der F-Test. Übung.
Gleichheit zweier Verteilungen: χ2 -Test
Messung vs. Theorie
Null-Hypothese: Messung (Stichprobengröße N) repräsentiert ZV mit Verteilung P (X).
Idee: Vergleiche W.-Dichte, mit Histogramm wegen diskreten Werten (Messung)
• Klassenbildung (erfordert Histogramm): K Klassen s, W. ps
• ns = N ps : Theoretische Häufigkeit für Ergebnis in Klasse s
• ys =Häufigkeit für Messung in Klasse s
P
P
•
s Ys = N
s p(s) = 1,
• Ys ist poissonverteilt mit < Ys >= ns , V AR(Ys ) = ns
Gleichheit zweier Verteilungen: χ2 -Test
Kurzherleitung
• Normierung: Zs =
Y√
s −ns
ns
• Zusammenfassung der Abweichungen: V 2 =
P
s
Zs2
• V 2 ist Summe von K Quadraten von N0,1 -verteilten (N genügend groß) ZVen
• V 2 ist χ2 (K − 1)-verteilt
23
2
χ
• also wird die Hypothese mit Signifikanz α verworfen, wenn V 2 > q1−α
•
•
Gleichheit zweier Verteillungen: Kolmogorov-Smirnow-Test
Idee: Teste die kumulativen Verteilungen
24