Allgemeine Elektrotechnik
Werbung

Allgemeine
Elektrotechnik
Peter Niklaus
Letzte Änderung: 23.06.2005
aet/nik
Inhaltsverzeichnis
INHALTSVERZEICHNIS
LITERATUR
1
1 EINFÜHRUNG
2
1.1 Geschichtliches
2
1.2 Physikalische Grössen und Einheiten
1.2.1 Zahlenwert und Einheit
1.2.2 Grundeinheiten und abgeleitete Einheiten
1.2.3 Gebrauch von Gleichungen und Einheiten
1.2.4 Skalare und vektorielle Grössen
5
5
5
6
9
1.3 Elektrizität und ihre Wirkungen
1.3.1 Elektrische Ladung, elektrischer Strom
1.3.2 Aufbau der Materie, Ladungsträger
1.3.3 Leiter und Nichtleiter
2 GRUNDBEGRIFFE UND GRUNDGESETZE (GLEICHSTROM)
10
10
11
12
13
2.1 Spannung, Strom und Widerstand
2.1.1 Kraft zwischen Punktladungen (Coulomb)
2.1.2 Feldbegriff (Faraday)
2.1.3 Arbeit im Feld, Spannung und Potential
2.1.4 Strom
2.1.5 Widerstand
13
13
14
16
18
20
2.2 Der einfache Gleichstromkreis
2.2.1 Zählpfeile und Zählpfeilrichtungen
2.2.2 Das Ohmsche Gesetz
2.2.3 Die Kirchhoffschen Gesetze
2.2.4 Leistung und Arbeit
2.2.5 Elemente von Stromkreisen (Begriffe)
2.2.6 Einfache Schaltungen von Widerständen
2.2.7 Quellen, Ersatzschaltungen und Kennlinien
2.2.8 Zusammenschalten von Quellen
2.2.9 Verfügbare Quellenleistung und Leistungsanpassung
24
24
25
26
28
29
31
33
39
40
2.3 Analyse von Gleichstromkreisen
2.3.1 Anwendung von Knoten- und Maschensatz
2.3.2 Netzumwandlung
Dreieck-Stern-Umwandlung (∆→Y) und Stern-Dreieck-Umwandlung (Y→∆)
U-Quellen verdoppeln (Punkte mit gleichem Potential trennen)
I-Quellen verdoppeln (Zusätzliche Einströmungen einführen)
Ersatzquellen einführen
2.3.3 Überlagerungssatz (Superposition)
42
42
44
44
45
45
45
47
aet/nik
Inhaltsverzeichnis
2.3.4 Knotenpotentialverfahren
2.3.5 Maschenstromverfahren
2.3.6 Dualität (und Äquivalenz)
49
52
54
3 EINFACHE RLC-NETZWERKE IM ZEITBEREICH
57
3.1 Grundgesetze im Zeitbereich
3.1.1 Widerstand
3.1.2 Spule
Selbstinduktion (am Beispiel der Drahtschlaufe)
3.1.3 Kondensator
3.1.4 Momentanleistung und Energie
57
58
58
59
61
61
3.2 Periodische Zeitabhängigkeit (Wechselgrössen)
3.2.1 Definitionen und Begriffe
3.2.2 Mittelwerte
Linearer Mittelwert
Betragsmittelwert (Gleichrichtmittelwert)
Effektivwert (Quadratischer Mittelwert)
Scheitelfaktor SF
Formfaktor FF
63
63
64
64
65
65
66
67
3.3 Ein- und Ausschaltvorgänge (Transientes Verhalten)
3.3.1 RC-Netzwerke
3.3.2 RL-Netzwerke
3.3.3 Übergang zum stationären Zustand
68
68
75
76
4 HARMONISCHE ZEITABHÄNGIGKEIT
77
4.1 Grundgesetze bei "Sinusstrom"
4.1.1 Widerstand
4.1.2 Spule
4.1.3 Kondensator
4.1.4 Momentanleistung
4.1.5 Gespeicherte Energie in Spule und Kondensator
77
77
78
78
80
81
4.2 Komplexe Zahlen
4.2.1 Definitionen, Begriffe und Darstellung
4.2.2 Rechenoperationen
83
83
86
4.3 Zeiger und harmonische Zeitabhängigkeit
4.3.1 Komplexer Drehzeiger
4.3.2 Komplexer Festzeiger (Zeiger)
4.3.3 Harmonische Zeitfunktion und Zeiger
87
87
87
87
4.4 Grundgesetze im Operatorbereich (Frequenzbereich)
4.4.1 Widerstand
4.4.2 Spule
4.4.3 Kondensator
4.4.4 Wirkleistung, Blindleistung und Scheinleistung
89
89
89
89
91
aet/nik
Inhaltsverzeichnis
4.4.5 Begriff der "Übertragungsfunktion"
94
4.5 Darstellung im Frequenzbereich
4.5.1 Ortskurve
4.5.2 Frequenzgang (Bodediagramm)
96
96
100
4.6 Mehrphasensysteme
4.6.1 Begriffe und Übersicht
4.6.2 Drehstromverbraucher
a) Dreieck-Schaltung, Symbol ∆
b) Stern-Schaltung, Symbol Y (mit Mittelpunktsleiter)
c) Stern-Schaltung ohne Mittelpunktsleiter
4.6.3 Leistungsmessung (Wattmeter)
Leistungsmessung bei mehrphasigen Systemen
106
106
109
109
110
110
112
113
4.7 Ausgewählte Anwendungen
4.7.1 Resonanz, Gütefaktor und Schwingkreise
4.7.2 Serie-Parallel-Umformung
4.7.3 Serieschwingkreis und Resonanz
4.7.4 Der Parallelschwingkreis
Bestimmung des Gütefaktors Q aus der Phasensteilheit
Resonanzfrequenz bei verlustbehafteten Schwingkreisen
4.7.5 Reaktanzeintore
4.7.6 Leistungsanpassung mit reaktiven Elementen
Leistungsanpassung bei komplexer Quellenimpedanz
114
114
116
117
120
123
124
125
125
128
5 PERIODISCHE ZEITFUNKTIONEN UND FOURIERREIHE
130
5.1 Einführung
5.1.1 Vektordarstellung und Skalarprodukt
5.1.2 Orthogonalitätsbegriff für Funktionen
5.1.3 Sin- und Cos-Funktion(en) als Beispiel einer orthogonalen Basis
130
130
131
133
5.2 Definitionen und Beispiele
5.2.1 Fourierreihe mit ak und bk
5.2.2 Ausgewählte Beispiele
5.2.3 Fourierreihe mit Ak und ϕk
133
133
134
136
5.3 Anwendungen
5.3.1 Effektivwert (Leistung) bei mehrwelligen Zeitfunktionen
5.3.2 Klirrfaktor
5.3.3 Zeigerrechnung für mehrwellige Zeitfunktionen
Mittlere Leistung P, wenn u(t) und i(t) als Fourierreihe gegeben sind
140
140
141
141
144
aet/nik
Inhaltsverzeichnis
7 ZWEITORE (2-TORE)
130
7.1 Einführung
130
7.2 Einteilung der 2-Tore
133
7.3 2-Tor-Gleichungen und -matrizen
140
7.4 Umrechnung von 2-Tor-Matrizen
140
7.5 Umkehrung eines 2-Tores, reziproke und symm. 2-Tore
140
7.6 Leerlauf und Kurzschluss am 2-Tor
140
7.7 Eingangsimpedanz und Übertragungsgrössen bei beliebiger Last
140
7.8 Der Gyrator
140
7.9 Gesteuerte Quellen
140
7.10 Ersatzschaltungen
140
7.11 Zusammenschalten von 2-Toren
140
7.12 Spezielle 2-Tore
140
aet/nik
Literatur
LITERATUR
[1]
John D. Kraus, Electromagnetics. McGraw-Hill, 1984.
[2]
A. von Weiss, M. Krause, Allgemeine Elektrotechnik. Vieweg, 1984
[3]
H. Fricke, P. Vaske, Grundlagen der Elektrotechnik Teil 1: Elektrische Netzwerke.
B. G. Teubner, Stuttgart, 1982.
[4]
A. Führer, K. Heidemann, W. Nerreter, Grundgebiete der Elektrotechnik, Band 1:
Stationäre Vorgänge. Carl Hanser Verlag, 1994.
[5]
A. Führer, K. Heidemann, W. Nerreter, Grundgebiete der Elektrotechnik, Band 2:
Zeitabhängige Vorgänge. Carl Hanser Verlag, 1994.
[6]
G. Epprecht, Technische Elektrizitätslehre III, Vorlesungsmanuskript der ETH,
AMIV-Verlag, 1979.
[7]
Reinhold Paul, Elektrotechnik und Elektronik für Informatiker, Band 1: Grundgebiete
der Elektrotechnik. B. G. Teubner Stuttgart 1994.
[8]
H. Frohne, Karl-Heinz Löcherer, Hans Müller, Moeller, Grundlagen der Elektrotechnik.
B. G. Teubner Stuttgart 2002.
[9]
P. Leuchtmann, Einführung in die elektromagnetische Feldtheorie. Pearson Studium, 2005.
1
aet/nik
1 Einführung
2
1 EINFÜHRUNG
1.1 Geschichtliches
Etwa 600 Jahre v. Chr. stellte Thales von Milet (ein griechischer Mathematiker, Astronom und
Philosoph) fest, dass ein mit einem Seidentuch geriebener Bernsteinstab Funken produzierte. Der
geriebene Bernstein schien auch magische Kräfte zu haben, denn er zog Staubteilchen, Flaum und
sogar Strohhalme an. Das griechische Wort für Bernstein ist elektron, und von dort stammt unsere
Bezeichnung für Elektrotechnik, Elektron und Elektronik. Thales bemerkte auch die Kräfte zwischen Steinen (natürlicher Magnetismus), die am Ort Magnesia gefunden wurden; das führte zu den
heutigen Begriffen Magnet und Magnetismus. Thales war ein Pionier für beide Gebiete Elektrizität
und Magnetismus, aber sein Hauptinteresse galt der Philosophie und war eher theoretischer als
praktischer Natur. Es dauerte 22 Jahrhunderte, bis diese Phänomene seriös und experimentell untersucht wurden.
Erst William Gilbert führte etwa um 1600 n. Chr. die ersten systematischen Experimente zu
elektrischen und magnetischen Phänomenen durch; niedergeschrieben im berühmten Buch De
Magnete. Gilbert erfand das Elektroskop zur Messung elektrostatischer Effekte. Er war auch der
erste Mensch, der erkannte, dass die Erde ein riesiger Magnet ist; damit gewann er neue Erkenntnisse zum Kompass und zur Kompassnadel als Indikator für magnetische Kräfte.
Um 1750 experimentierte der amerikanische Wissenschaftler/Staatsmann Benjamin Franklin
mit Elektrizität und erfand den Blitzableiter. Franklin wies auch die Ladungserhaltung nach und
bestimmte, dass positive und negative Ladungen existieren. Der Franzose Charles Augustin de
Coulomb entwickelte eine empfindliche Torsionswaage, mit der er elektrische und magnetische
Kräfte mass. Etwa in dieser Zeit formulierte Karl Friedrich Gauss (deutscher Mathematiker und
Astronom) seinen berühmten Divergenzsatz, welcher das Volumenintegral mit dem Oberflächenintegral in Beziehung setzt.
Der Italiener Alessandro Volta erfand 1800 die Spannungszelle und durch Serieschalten der
Zellen die elektrische Batterie. Mit Batterien konnten elektrische Ströme erzeugt werden und 1819
fand der dänische Physiker Hans Christian Oersted, dass eine Kompassnadel durch einen stromdurchflossenen Draht abgelenkt wird. Damit entdeckte er, dass Elektrizität Magnetismus erzeugen
konnte (Kopplung der elektrischen und magnetischen Kräfte); früher wurden beide Effekte als unabhängige Phänomene betrachtet.
Im folgenden Jahr erweiterte der Franzose André Marie Ampère die Beobachtungen von
Oersted. Er erfand die kreisförmige Spule und erzeugte damit magnetische Felder; er postulierte
ebenfalls die korrekte Theorie, das Magnetfeld von Magnetmaterial (Permanentmagnet) werde
durch kleine Kreisströme im Material erzeugt. Zu dieser Zeit publizierte Georg Simon Ohm sein
nun berühmtes Gesetz über den Zusammenhang von Spannung, Strom und Widerstand. Anfänglich
wurde Ohm belächelt und verspottet und erst eine Dekade später realisierten die Forscher die Korrektheit und Wichtigkeit des Ohm’schen Gesetzes.
Michael Faraday zeigte 1831 in London mit einem Experiment, dass ein änderndes magnetisches Feld elektrischen Strom erzeugen kann. So wie Oersted fand, dass Elektrizität Magnetismus
erzeugen kann, so entdeckte Faraday, dass Magnetismus Elektrizität erzeugen kann. Etwa gleichzeitig entdeckte Joseph Henry of Albany (New York) denselben Effekt unabhängig von Faraday.
Henry erfand auch den elektrischen Telegraph und das Relais.
aet/nik
1 Einführung
3
Faradays ausgedehnte experimentellen Untersuchungen erlaubten James Clerk Maxwell (Professor
an der Cambridge Universität, England) elegant und tiefgründig die gegenseitige Abhängigkeit von
Elektrizität und Magnetismus zu zeigen. In seiner klassischen Abhandlung von 1873 publizierte er
die erste vereinheitlichte Theorie von Elektrizität und Magnetismus und begründete damit die
Wissenschaft der elektromagnetischen Felder. Er postulierte, dass Licht von elektromagnetischem
Ursprung sei und dass elektromagnetische Strahlung (Wellen) mit anderer Wellenlänge auch
möglich sein müsse.
Obwohl die Maxwellgleichungen von grosser Bedeutung sind und zusammen mit den Randund Kontinuitätsbedingungen die Grundlagen des modernen Elektromagnetismus bilden, waren
viele Forscher zu Maxwell’s Zeit skeptisch gegenüber seinen Theorien eingestellt. Erst 15 Jahre
Pioniere der Elektrotechnik
Name
Daten
Wichtiger Beitrag
Thales von Milet
William Gilbert
Benjamin Franklin
Charles A. de Coulomb
Karl F. Gauss
Alessandro Volta
Hans C. Oersted
636-546 v. Chr.
1540-1603 n. Chr.
1706-1790
1736-1806
1777-1855
1745-1827
1777-1851
André M. Ampère
Joseph Henry
Georg S. Ohm
Michael Faraday
1775-1836
1797-1878
1787-1854
1791-1867
James P. Joule
1818-1889
James C. Maxwell
1831-1879
Heinrich Hertz
Guglielmo Marconi
Thomas A. Edison
1857-1894
1874-1937
1847-1931
Nikola Tesla
Albert Einstein
1856-1943
1879-1955
Pionier in Elektrizität und Magnetismus
Erkannte, dass die Erde ein riesiger Magnet ist
Nachweis der Ladungserhaltung
Mass elektrische und magnetische Kräfte
Divergenzsatz
Erfand die Spannungszellen
Entdeckte, dass elektrische Felder magnetische
Felder erzeugen können
Erfand die Spule (Solenoid)
Experimente zum elektrischen Telegraph
Formulierte das Ohm’sche Gesetz
Zeigte, dass magnetische Felder elektrische Felder
erzeugen können
Wies nach, dass die Wärme proportional zum
Quadrat des Stromes ist
Gründer der Theorie der elektromagnetischen
Felder und Wellen
Begründer des Radio (Wellenausbreitung)
Praktische Anwendungen der Wellenausbreitung
Erfinder der Glühlampe und Erbauer der ersten
Energieübertragung
Zeigte den praktischen Wert von Wechselstrom
Machte die Maxwell’schen Gleichungen universell
gültig mit Hilfe seiner Relativitätstheorie
Einheit
Gilbert (Gb)
Coulomb (C)
Gauss (G)
Volt (V)
Oersted (Oe)
Ampere (A)
Henry (H)
Ohm (Ω)
Farad (F)
Joule (J)
Maxwell (Mx)
Hertz (Hz)
Tesla (T)
Weitere Pioniere, die mit SI-Einheiten geehrt wurden
Name
Daten
Wichtiger Beitrag
Einheit
Isaac Newton
1642-1727
James Watt
1736-1819
Wilhelm E. Weber
1804-1891
Formulierte die allgemeinen Bewegungsgesetze der Newton (N)
Mechanik und der Gravitation. Die Newton’schen
Gesetze sind für Mechanik die Grundlagen, so wie
die Maxwell’schen Gleichungen für die
Elektrotechnik
Bahnbrechende Anwendungen bei der
Watt (W)
Dampfmaschine
Leistete grundlegende Arbeiten zum
Weber (Wb)
Erdmagnetismus
aet/nik
1 Einführung
4
später (1888) wurden seine Theorien durch Heinrich Hertz gerechtfertigt. Hertz war ein deutscher
Physikprofessor in Karlsruhe. Er erzeugte und detektierte elektromagnetische Wellen (Radiowellen)
mit einer Wellenlänge von etwa 5 m (Frequenz ≈ 60MHz). Mit einem Funkensender und Empfänger
zeigte er experimentell, dass Polarisation, Reflexion und Brechung von Radiowellen identisch
waren zu Licht; mit dem einzigen Unterschied der Wellenlänge.
Hertz war der Vater der Radiowellen, aber seine Erfindung blieb eine Laborkuriosität bis der
Italiener Guglielmo Marconi das Funkensystem von Hertz adaptierte und damit Informationen durch
den freien Raum schickte. Marconi erweiterte die Anlage mit einer Abstimmung, grösserer Antenne
und einem Erdungssystem; der Wechsel zu grösserer Wellenlänge erlaubte die Überbrückung
grosser Distanzen. Es war eine Weltsensation, als Marconi 1901 Radiosignale über den Atlantik
schickte. Marconi war auch ein Pionier bei der Entwicklung von Funksystemen für Schiffe. Vor der
„drahtlosen Ära“ war ein Schiff auf hoher See komplett isoliert. Es konnten sich Unglücksfälle
ereignen, völlig unbemerkt vom Festland oder von anderen Schiffen. Mit Marconi veränderte sich
diese Situation abrupt, und Funksysteme (Radio) gewannen grosse wirtschaftliche Bedeutung.
Thomas Alva Edison, der grosse amerikanische Erfinder, entwickelte mit Elektrizität und
Magnetismus praktische Anwendungen wie Telegraph, Telephon, Licht, Energieerzeugung und
Energieübertragung. Während Edison eine Vorliebe für Gleichstrom hatte, so entwickelte Nikola
Tesla eine Energieübertragung mit Wechselstrom und erfand den Induktionsmotor. Tesla entwarf
ein grosses Kraftwerk für die Niagarafälle. Als das Kraftwerk 1895 seinen Betrieb aufnahm, erzeugte es gleichviel Leistung, wie alle anderen Kraftwerke zusammen in den USA. Tesla war als
junger Mann von Jugoslawien nach den USA emigriert.
Frühere Denker glaubten, dass das Verrinnen der Zeit absolut sei und dass die Zeit, unabhängig vom Bezugssystem (ruhend oder bewegt), überall die gleiche Bedeutung habe. Eine kritische
Analyse durch Albert Einstein führte 1905 (als Angestellter des Patentamts in Bern) zu einem
neuen Konzept über das Raum-Zeitgebilde. Einstein’s Relativitätstheorie sagt uns, dass eine vom
Beobachter unabhängige Physik nicht existiert. Was uns, als ruhendem Beobachter, als ein statisches elektrisches Feld erscheint, nimmt ein bewegter Beobachter zum Teil als magnetisches Feld
wahr. Bis zu Einstein wurden Gravitation und Elektromagnetismus als völlig unabhängig betrachtet,
aber Einstein’s Voraussage über die Ablenkung von Licht durch eine grosse Masse (Stern) hat sich
in der Praxis bestens bestätigt.
Einstein und andere Forscher suchten nach einer Theorie (Grand Unified Theory), die alle
fünf Kräfte der Physik vereinheitlicht (elektrische Kraft, magnetische Kraft, Gravitation, schwache
und starke Wechselwirkung), die Maxwell’schen Gleichungen wären dann nur ein Spezialfall dieser
Theorie. Bis heute wurde diese vereinheitlichte Theorie (GUT) noch nicht gefunden, aber die Arbeit
daran ist immer noch eine der grossen Herausforderungen der modernen Physik.
Wenig Gebiete sind so gründlich verstanden worden wie der Elektromagnetismus und wenig
Gebiete haben einen grösseren Einfluss auf das praktische Leben. Motoren und Generatoren, Licht
und Wärme, Telephon, Radio, Fernsehen, Datenkommunikation, Computer, Internet, Medizinelektronik, Radar, Fernsteuerungen u.a. haben unser Leben komplett verändert. Hunderte von geostationären Satelliten umkreisen die Erde in etwa 36000 km Höhe. Mit Radioteleskopen (terrestrisch
und im Weltraum) erkunden wir das Universum bis an seine Grenzen, auf allen Wellenlängen (von
den kürzesten Gammastrahlen bis zu den längsten Radiowellen).
Unsere Zivilisation wurde revolutioniert durch die Anwendung der Elektrotechnik.
aet/nik
1 Einführung
5
1.2 Physikalische Grössen und Einheiten
1.2.1 Zahlenwert und Einheit
Physikalische Grössen geben die messbaren Eigenschaften physikalischer Gegenstände, Vorgänge
oder Zustände (also z.B. Länge, Zeit, Masse, Geschwindigkeit, Energie, Leistung, Kraft, Temperatur, Spannung) wieder. Eine solche Grösse hat stets einen Zahlenwert (Masszahl) und eine Einheit,
die erst eine physikalische Grösse als solche auch quantitativ kennzeichnet. So kann etwa eine
Strecke l in den Einheiten Meter (m), Kilometer (km) oder gar Zoll angegeben werden, z.B. l = 1 m
= 0.001 km ≈ 39.37 Zoll. Zahlenwert und Einheit sind somit stets miteinander verknüpft sowie
voneinander abhängig. Jedes Formelzeichen (Symbol) für eine physikalische Grösse, z.B. l für
Länge, stellt ein Produkt aus Zahlenwert und Einheit dar.
Erweist sich eine Einheit als unpraktisch, weil sie einen sehr grossen oder sehr kleinen
Zahlenwert erfordert, so kann man dekadische Teile oder Vielfache der Einheit verwenden. Das
Einheitszeichen wird dann mit einem Vorsatzzeichen verwendet.
Vorsatzzeichen
Vorsatzzeichen
Abkürzung
Grösse
Exa
Peta
Tera
Giga
Mega
Kilo
Milli
Micro
Nano
Pico
Femto
Atto
E
P
T
G
M
k
m
µ
n
p
f
a
1018
1015
1012
109
106
103
10-3
10-6
10-9
10-12
10-15
10-18
Es sind dann mit der Längeneinheit Meter (m)
10000 cm = 100 m = 0.1 km
und mit der Spannungseinheit Volt (V)
0.001 V = 1 mV = 1000 µV
Von der Einheit einer physikalischen Grösse ist ihre Dimension zu unterscheiden. Während die
Einheit einer Grösse zu ihrer quantitativen Charakterisierung dient, gibt die Dimension ihre qualitative Charakterisierung an und kennzeichnet die Art der Grösse. So haben Weg, Höhe und Strecke
die gleiche Dimension einer Länge.
1.2.2 Grundeinheiten und abgeleitete Einheiten
Grund- oder Basiseinheiten können nicht aus anderen Einheiten abgeleitet werden, sie dienen vielmehr selbst zur Ableitung weiterer Einheiten. Das 1960 international angenommene Einheitensystem (Système Internationale d’Unités, Abk. SI) besteht aus den sieben Grundeinheiten:
Basisgrösse
Basiseinheit
Abkürzung
Länge
Masse
Zeit
Stromstärke
Temperatur
Stoffmenge
Lichtstärke
Meter
Kilogramm
Sekunde
Ampere
Kelvin
Mol
Candela
m
kg
s
A
K
n
cd
aet/nik
1 Einführung
6
Die Definitionen für diese Basiseinheiten sind:
Meter:
Kilogramm:
Sekunde:
Ampere:
Kelvin:
Mol:
Candela:
Strecke, die das Licht im Vakuum in der Zeit t = 1/299'792’458 s zurücklegt mit
der Definition der Lichtgeschwindigkeit (Vakuum) von c = 2.99792458⋅108 m/s.
Gleich der Masse des internationalen Kilogrammprototyps (Platin-Iridium) in Sèvres
bei Paris (einzige künstliche Definition innerhalb der SI-Einheiten).
Gleich der Dauer von 9'192’631'770 Perioden einer Atomschwingung (Spektrallinie
des Hyperfeinstrukturübergangs) von Cäsium (Nuklid 133Cs).
Stromstärke eines Stromes, der in zwei parallelen unendlich langen, in einem Meter
Abstand im Vakuum befindlichen Leitern fliesst, wenn zwischen ihnen eine Kraft
von 2⋅10-7 Newton pro Meter Länge ausgeübt wird.
Gleich 1/273.16 der Temperatur des Tripelpunkts von Wasser.
Ein Mol ist die Stoffmenge eines Systems aus ebensoviel Teilchen wie Atome in
12 g des Kohlenstoffnuklids 12C enthalten sind.
Lichtstärke einer 1/600'000 m2 grossen Fläche, die von einem idealen Strahler, mit
der Temperatur von gefrierendem Platin, beleuchtet wird.
Die Einheiten für andere (physikalische) Grössen werden abgeleitete Einheiten oder sekundäre Einheiten genannt; z.B. die Geschwindigkeit in m/s, die Beschleunigung in m/s2 und die Kraft in
kg⋅m/s2 = N (Newton).
1.2.3 Gebrauch von Gleichungen und Einheiten
Mit den Formelzeichen für physikalische Grössen kann man nach den Regeln der Algebra ähnlich
wie mit gewöhnlichen Variablen/Zahlen operieren. Da aber jedes Formelzeichen das Produkt aus
Zahlenwert und Einheit bedeutet, müssen die aus Formelzeichen gebildeten Ausdrücke in den Gleichungen rechts und links des Gleichheitszeichen stets gleiche Dimensionen haben, was als zusätzliche Kontrolle für die Richtigkeit der Berechnung dienen kann. Alle gegebenen Grössen können
grundsätzlich in beliebigen Einheiten eingesetzt werden. Die Einheit der gesuchten Grösse ist dann
zwangsläufig durch die eingesetzten Einheiten gegeben. Beziehungen solcher Art heissen Grössengleichungen. Solange Einheiten konsequent durch jede Umformung/Rechnung mitgeführt werden, ergeben sich korrekte Resultate.
Bsp1-1: Ein Fahrzeug legt die Wegstrecke s = 16.8 km in der Zeit t = 0.7 h zurück. Wie gross ist
seine durchschnittliche Geschwindigkeit? Mit v = s/t ergeben sich:
v=
16.8km
= 24 km / h
0.7h
v=
16.8km
= 400 m / min
42min
v=
16800m
= 6.6 m / s
2520s
Bei diesen drei Versionen ist die Dritte vorzuziehen, das
Resultat (Geschwindigkeit) wird in „klassischen SIEinheiten“ angegeben. Bei diesem einfachen Beispiel ist
zwar der Vorteil noch nicht ersichtlich, aber bei komplizierteren Beispielen (und nach einigen schmerzhaften
Abstürzen) schätzt man die Angabe einer Grösse in
SI-Basiseinheiten.
2⋅q
⋅ U soll die Geschwindigkeit eines Elektrons berechnet werden,
m
das mit einer Spannung U beschleunigt wurde. Dabei sind U =12 kV, q = 1.602⋅10-19 As und
m = 9.109⋅10-31 kg. Setzt man die gegebenen Zahlen (mit SI-Basiseinheiten) in die Formel ein, so
erhält man für die Geschwindigkeit einen Zahlenwert von 6.50⋅107. Welche Einheit muss jetzt diesem Zahlenwert zugeordnet werden? Selbstverständlich die „Basiseinheit für Geschwindigkeit“,
Bsp1-2: Mit der Formel v =
aet/nik
1 Einführung
7
nämlich m/s, so dass man für das Resultat schreibt: v = 6.50⋅107 m/s. Die Umrechnung auf km/s
oder km/h kann jetzt (nachträglich) einfach geschehen. Man prüfe in diesem Beispiel durch Einheitenkontrolle, dass das Resultat tatsächlich die Einheit m/s aufweist.
Regel
Werden in einer Formel alle Grössen in Basiseinheiten eingesetzt,
so erhält man auch das Resultat (Zahlenwert) in einer Basiseinheit,
oder einer Kombination von Basiseinheiten
Es ist manchmal nötig und schmerzlich, sich von schlechten Gewohnheiten zu trennen. So sollte für
den spezifischen Widerstand von Kupfer nicht mehr 0.0175 Ωmm2/m verwendet werden, sondern
ρ = 1.75⋅10-8 Ωm und für die spez. Leitfähigkeit σ = 5.7⋅107 1/(Ωm). Das Ziel ist also, möglichst
alle Angaben mit Basiseinheiten, und die Zahlenwerte mit Hilfe von Zehnerpotenzen zu schreiben.
Als Beispiel zu obiger Regel wird die Berechnung des ohm’schen Widerstandes eines
Drahtes demonstriert, dabei wird auch gezeigt, welche Zahlenwerte in den Taschenrechner
(Computer) eingetippt werden.
Bsp1-3: Die Formel für die Berechnung des Widerstandes heisst R =
l
ρ ⋅l
=
, mit der
A σ⋅A
folgenden Bedeutung der Symbole:
ρ: spezifischer Widerstand des Leitermaterials (ρcu = 1.75⋅10-8 Ωm)
σ: spezifische Leitfähigkeit des Leitermaterials σ = 1/ρ
l: Länge des Drahtes (im Beispiel sei l = 75 m)
A: Querschnittsfläche des Drahtes (im Beispiel sei der Drahtdurchmesser d = 2 mm)
ρ ⋅l
damit wird R =
,
nun werden die folgenden Zahlenwerte eingetippt:
π
d2 ⋅
4
−8
175
. ⋅ 10 ⋅ 75
= 0.418 Ω .
R=
Dieser Bruchstrich mit den Zahlenwerten muss nicht nieder2
2 ⋅ 10−3 ⋅ π / 4
c
c
h
hb g
geschrieben werden, er zeigt nur auf, wie die gegebenen Zahlenwerte numerisch auszuwerten sind.
Die (empfohlene) Einheitenkontrolle geschieht mit der Grössengleichung und nicht mit der Zahlenwertgleichung. In der „Rechenschieberära“ war die Zahlenwertgleichung nötig, um die Grössenordnung des Resultats abzuschätzen, heute hingegen ist sie überflüssig (ausser man möchte eine
Abschätzung des Resultates). Obiges Vorgehen wird dringend empfohlen, die Erfahrung zeigt, dass
hier eine typische Fehlerquelle liegt.
Empfehlung
Numerische Auswertung der Grössen in Basiseinheiten, d.h. Verkleinerung/Vergrösserung
nicht in der Einheit durchführen, sondern Zahlenwerte entsprechend ändern
aet/nik
1 Einführung
8
Will man ausdrücklich angeben, wie die Einheit einer speziellen physikalischen Grösse heisst, so
schreibt man sogenannte Einheitengleichungen auf:
Einheitengleichung
wird gelesen als
[F] = N
[P] = W
[U] = V
[R] = Ω
Die Einheit der Kraft ist Newton
Die Einheit der Leistung ist Watt
Die Einheit der Spannung ist Volt
Die Einheit des Widerstandes ist Ohm
Um das Rechnen mit Einheiten etwas zu erleichtern, werden die für die Elektrotechnik wichtigsten
Grössen (mit ihren Einheiten) zusammengestellt.
Tabelle 1-1: Wichtige Einheiten, Grössen und Konstanten
Grösse
Formelzeichen
Name und Symbol
der Einheit
Basiseinheiten
Länge
Masse
Zeit
Stromstärke
l
m
t
I, i
Meter
Kilogramm
Sekunde
Ampere
m
kg
s
A
Abgeleitete Einheiten
Kraft
Leistung
Arbeit, Energie
F
P
W
Newton
Watt
Joule
N
W
J
Spannung
Widerstand
Spezifischer Widerstand
Leitwert
Spezifische Leitfähigkeit
Ladung
Elektr. Verschiebungsdichte
Elektr. Feldstärke
Kapazität
Induktionsfluss
Magn. Induktionsdichte
Magn. Feldstärke
Induktivität
Gleichbedeutende
Ausdrücke
Umrechnung einiger
älterer Einheiten auf das
SI-System
o
U, u
R
ρ
G
σ
Q
D
E
C
φ
B
H
L
Volt
Ohm
Siemens
Coulomb
Farad
Weber
Tesla
Henry
Angström 1 A = 10-10 m
1 N = 1 mkg/s2
1 W = 1 VA = 1 Nm/s
1 J = 1 Ws = 1 Nm
V
Ω
Ωm
S
S/m
C
As/m2
V/m
F
Wb
T
A/m
H
PS:
1 PS ≈ 736 W
kcal: 1 kcal ≈ 4.1868 kJ
1 V = 1 W/A
1 Ω = 1 V/A
1 Ωm = 1 Vm/A
= 1 A/V
1S
= 1 Ω-1
-1
1 S/m = 1 (Ωm)
1C
= 1 As
1 C/m2 = 1 As/m2
1 F = 1 As/V = 1 s/Ω
1 Wb = 1 Vs
1 T = 1 Vs/m2
1H
Gauss:
= 1 Vs/A = 1 Ωs
Universelle Konstanten
Lichtgeschwindigkeit im Vakuum
c0 = 299'792’458 m/s (Definition)
Elementarladung
e = 1.6022⋅10-19 C
(Elektron besitzt die Ladung –e)
m0 = 9.1096⋅10
-31
kg
Ruhemasse Proton
mp = 1.6726⋅10
-27
kg
Permeabilität im Vakuum
µ0 = 4π⋅10-7 Vs/Am
Permittivität im Vakuum
ε0 = 1/(c02⋅µ0) ≈ 8.85419⋅10-12 As/Vm
Wellenimpedanz des freien Raumes
η0 =
Ruhemasse Elektron
µ 0 ε 0 ≈ 376.73 Ω
1 Gs = 10-4 T
aet/nik
1 Einführung
9
1.2.4 Skalare und vektorielle Grössen
Grössen, die durch die Angabe eines Zahlenwertes und der Einheit eindeutig bestimmt sind, bezeichnet man als skalare Grössen oder Skalare. Solche Grössen sind z.B. die Masse m, Leistung P,
Zeit t usw. Grössen, die in einer bestimmten Richtung des Raumes wirken und denen daher zusätzlich zu Zahlenwert und Einheit eine bestimmte Richtung im Raum zugeordnet werden kann, bezeichnet man als vektorielle Grössen oder Vektoren. Sie werden durch Symbole mit Pfeil darüber
dargestellt (viele Bücher verwenden fette Formelzeichen für Vektoren, z.B. F
H für Kraft). Ihr Betrag
H
ist gleich der Länge des Vektors. Vektorielle Grössen sind z.B. die Kraft F , Geschwindigkeit v
H
und Beschleunigung a . Ihre Grösse oder Betrag ist
H
F = F,
H
v = v,
H
a =a
H H
H
Einheitsvektoren schreibt man oft als ex , e y , und ez für die drei Raumkoordinaten x, y und z.
H H
H
Der Ausdruck D = ex ⋅ 200 pC m −2 bedeutet also, dass die elektrische Flussdichte D ein Vektor ist
und die Richtung in positiver x-Achse besitzt mit einem Betrag von 200 Picocoulomb pro Quadratmeter.
{Aufg1-1}
aet/nik
1 Einführung
10
1.3 Elektrizität und ihre Wirkungen
1.3.1 Elektrische Ladung, elektrischer Strom
Die Elektrizitätsmenge oder elektrische Ladung Q ist eine physikalische Grösse, die ein Einzelmerkmal der Natur darstellt und mechanisch nicht erklärt werden kann. Elektrizität ist ein Baustoff
der Materie; man kann immer nur ihre Wirkung erkennen und daran ihre Existenz nachweisen.
Jede elektrische Ladung benötigt einen Träger. Reibt man z.B. einen Hartgummi- oder
Glasstab, so entstehen auf deren Oberfläche elektrische Ladungen. Das Vorhandensein dieser Ladungen ist daran zu erkennen, dass sich der Raum in ihrer Umgebung in einem Zwangszustand befindet, den man als „elektrisches Feld“ bezeichnet und bei dem vorher nicht vorhandenen Kräfte auf
in den Raum gebrachte ebenfalls „elektrisierte“ Körper ausgeübt werden. Körper, die eine
elektrische Ladung tragen, üben also eine Kraftwirkung aufeinander aus, die im ungeladenen Zustand nicht zu beobachten ist. Elektrische Ladungen können sich dabei anziehen oder abstossen.
Man unterscheidet daher zwischen positiver und negativer Ladung. Gleichnamige Ladungen stossen
sich gegenseitig ab, während sich ungleichnamige Ladungen, also positive und negative, gegenseitig
anziehen. Werden gleich grosse Ladungen +Q und –Q zusammengebracht, so kompensieren sie
sich, d.h. der geladene Zustand ihres Trägers verschwindet. Daraus folgt:
„Elektrizitätserzeugung“ bedeutet Trennen von Ladungen verschiedenen Vorzeichens.
Im elektrisch neutralen Zustand heben sich die Wirkungen positiver und negativer Ladungen gegenseitig auf.
Experimentell lässt sich zeigen, dass sich elektrische Ladungen durch Berühren ladungstragender Körper mit ungeladenen Körpern übertragen lassen. Man kann sich daher die Elektrizität aus
kleinsten Elektrizitätsträgern bestehend vorstellen, beispielsweise aus Elektronen.
Die Elektrizitätsträger können sich in einigen Stoffen leicht bewegen, solche Stoffe sind
elektrische Leiter. Stoffe, in denen sich Elektrizitätsträger nur wenig oder praktisch gar nicht bewegen können, sind elektrische Nichtleiter oder Isolatoren (Dielektrika).
Bewegte Ladungen bedeuten einen elektrischen Strom (Konvektionsstrom). Bewegen sich
dabei die Ladungen in einem Leiter (Metall), so spricht man vom Leitungsstrom oder allgemein
vom elektrischen Strom. Die Ladung Q pro Zeit t durch den Querschnitt eines Leiters ist die Stromstärke I dieses Stromes, so dass
LMq(t ) = i(τ )dτ OP ,
N z Q
t
Q = I ⋅t
(1.1)
0
wobei für die linke Formel vorausgesetzt ist, dass I über eine längere Zeitdauer konstant ist. Demnach erhält man mit der Stromstärkeeinheit Ampere (A) und der Zeiteinheit Sekunde (s) als Ladungseinheit
1 Coulomb (C) = 1 Ampere-Sekunde (As).
Neben den Kraftwirkungen ruhend erscheinender und zeitlich unveränderlicher Ladungen, welche
von der Elektrostatik beschrieben werden, haben bewegte Ladungen (elektrische Ströme) im wesentlichen folgende zusätzliche Wirkungen:
aet/nik
1 Einführung
11
1. Thermische Wirkungen: Ein von einem elektrischen Strom durchflossener Leiter erwärmt sich
und kann bis zur Schmelz- oder Glühtemperatur erhitzt werden (Leuchterscheinungen).
2. Magnetische Wirkungen: In der Umgebung eines stromdurchflossenen Leiters oder sonstiger
bewegter Ladungen werden auf Magnete Kräfte ausgeübt. Ein stromdurchflossener Leiter wirkt
selbst wie ein Magnet.
3. Chemische Wirkungen: Flüssige Stoffe (sog. Elektrolyte) aber auch einige feste Stoffe (Kristalle)
werden beim Stromdurchgang chemisch verändert.
Im menschlichen und tierischen Körper treten ferner beim Stromdurchgang physiologische
Wirkungen auf, durch deren Muskel- und Nervenreaktionen organische Störungen oder sogar der
Tod eintreten kann. Schliesslich erfordert jede Aufrechterhaltung eines elektrischen Stromes eine
Energiezufuhr, sofern man von der Supraleitfähigkeit absieht.
1.3.2 Aufbau der Materie, Ladungsträger
Der kleinste Teil eines Stoffes, der sich physikalisch und chemisch noch wie der makroskopische
Stoff verhält, abgesehen von den Kollektiveigenschaften vieler Teilchen, ist ein Molekül. Moleküle
können noch weiterhin in Atome aufgeteilt werden, das sind kleinste Teilchen eines chemischen
Grundstoffes oder chemischen Elementes. Der Atomaufbau ist äusserst kompliziert.
Zusammengefasst erhält man als grobe Modellvorstellung (Bohrsches Atommodell) folgendes Bild: Um den positiven
Atomkern bewegen sich negative Elektronen, die die Elektronenhülle bilden. Innerhalb der Hülle, deren Aufbau bestimmten Gesetzen folgt, lassen sich die Elektronen zu Gruppen („Elektronenschalen“) zusammenfassen. Ein Elektron
kann sich dabei nur auf ganz bestimmten stationären Bahnen (Quantenbahnen) aufhalten. Beim Verweilen auf einer
solchen Bahn erfolgt keine Energieabgabe (strahlungsfreie Bahn). Jeder Elektronenbahn entspricht ein bestimmter Zustand (Quantenzustand), der durch seine Energie gekennzeichnet ist. In der untersten (innersten) Bahn ist die Elektronenenergie am geringsten. Eine Energieabgabe (Abstrahlung) erfolgt beim Übergang eines Elektrons von einer Energiestufe (Bahn) zu einer anderen Energiestufe kleinerer Energie. Dieser Übergang erfolgt sprunghaft als sog. Quantensprung. Die Energieabgabe ist dann gleich der Energiedifferenz ∆W zwischen beiden Energiestufen und erfolgt in Form
einer elektromagnetischen Strahlung. Die Anzahl der negativen Elektronen ist so gross, dass die positive Kernladung
gerade kompensiert wird. Ein Atom erscheint daher in grösserer Entfernung elektrisch neutral.
Mit dem Schalenmodell werden für die Elektronen sieben Schalen (Bahnen) postuliert, die von innen beginnend besetzt sind, die äusseren Schalen sind also teilweise unbesetzt oder unvollständig besetzt. Die Anzahl der Elektronen in der äusseren Schale bestimmt das chemische Verhalten und wird als Wertigkeit (Valenz) bezeichnet. Diese Elektronen werden daher Valenzelektronen genannt.
Man beachte aber:
Das Bohrsche Atommodell, insbesondere die Vorstellung von Kreisbahnen oder elliptischen Bahnen der Elektronen, stellt kein wahres Abbild der Wirklichkeit dar, sondern darf nur als grobes „mechanisches Modell“, also als
gedankliches Hilfsmittel angesehen werden.
Das Elektron ist Träger negativer Ladung, der Elementarladung
e = 1.6022⋅10-19 C
(1.2)
Jede elektrische Ladung kann immer nur ein ganzes Vielfaches der Elektronenladung sein. Dem
Elektron kann ferner eine Masse m0 (Ruhemasse)
m0 = 9.1096⋅10-31 kg
(1.3)
zugeordnet werden.
Wesentlich für Elektronen ist auch, dass sie nicht nur im Atomverband, sondern auch als „freie“ Elektronen auftreten
können.
aet/nik
1 Einführung
12
Die wesentlichen Bestandteile des Atomkerns sind Protonen und Neutronen, die man mit dem Sammelnamen
Nukleonen bezeichnet. Das Proton ist der Kern des Wasserstoffatoms. Seine Ladung beträgt +e. Seine Ruhemasse ist
mp = 1.6726⋅10-27 kg. Ein Neutron ist ein Teilchen etwa wie ein Proton, aber elektrisch neutral. Neutronen sind für die
Kernspaltung von grösster Bedeutung, da sie als ladungsfreie Teilchen von der Elektronenhülle der Atome nicht gebremst werden, so dass ein Zusammenstoss mit einem Kern gleichsam wie der Stoss elastischer Kugeln verläuft.
Die Beeinflussung der Elektronenhülle ist leicht möglich und erfordert im allgemeinen keine grosse Energie.
Wird die Energiezufuhr bis zum Ablösen eines Elektrons aus dem Atomverband gesteigert, so spricht man von Ionisierung, das bedeutet die Bildung von Ionen. Hierbei ist ein Ion ein kleines Masseteilchen (Atom oder Molekül), das dadurch elektrisch geladen erscheint, weil ihm entweder Elektronen entzogen wurden (Vorgang der Ionisation), oder weil
es zusätzliche Elektronen aufgenommen hat (Vorgang der Anlagerung). Im ersten Fall erhält man ein positives und im
zweiten Fall ein negatives Ion. Ionen sind demnach positive oder negative materielle Ladungsträger.
Um das elektrische Verhalten von Festkörpern (Kristallgitter) richtig zu verstehen, muss das Bändermodell studiert werden. Mit dem Bändermodell wird auch erklärt, warum die meisten Metalle
gute Leiter darstellen und welche Eigenschaften verantwortlich sind, dass gewisse Stoffe schlechte
Leiter sind. Für das Studium des Bändermodells wird an dieser Stelle auf die Physik verwiesen.
1.3.3 Leiter und Nichtleiter
Nach ihrem Leitvermögen für elektrischen Strom ist es üblich, Stoffe (Materialien) in Leiter und
Nichtleiter zu unterteilen. Zu den guten Leitern zählen die Metalle. Beim Stromdurchgang erfahren
sie bei Normaltemperatur keine chemischen Veränderungen; die Elektrizitätsleitung in Metallen ist
daher eine Elektronenleitung, da kein Materialtransport stattfindet. Auch Flüssigkeiten wie Säuren,
Basen und Salzlösungen sind elektrische Leiter, werden aber beim Stromdurchgang chemisch verändert (sog. Elektrolyte). Am Elektrizitätstransport in Elektrolyten müssen daher auch Ionen als
materielle Ladungsträger beteiligt sein.
Gute Nichtleiter (Isolatoren) sind u.a. Gummi, Seide, zahlreiche Kunststoffe, Porzellan,
Glas, Glimmer, usw. In diesen Stoffen stehen nahezu keine Elektronen zur Elektrizitätsleitung zur
Verfügung, diese Stoffe haben praktisch vernachlässigbares Leitvermögen für elektrischen Strom.
Idealer Nichtleiter ist das Vakuum.
Unter Halbleitern versteht man im Allgemeinen keine „schlechten Leiter“, sondern Stoffe
mit ganz speziellen Eigenschaften des Leitvermögens. Für Eigenschaften und Anwendungen der
Halbleiter wird auf die Elektronik verwiesen.
{Aufg1-2 ... Aufg1-5}
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
13
2 GRUNDBEGRIFFE UND GRUNDGESETZE
(GLEICHSTROM)
2.1 Spannung, Strom und Widerstand
2.1.1 Kraft zwischen Punktladungen (Coulomb)
Aus unserer täglichen Erfahrung wissen wir, dass sich Massen anziehen (Gravitation). Zur Berechnung der Anziehungskraft zwischen zwei punktförmigen Massen (Massepunkte) im Abstand a hat
man folgende Formel gefunden:
m ⋅m
FG = G ⋅ 1 2 2
(2.1)
a
wobei m1:
m2:
a:
G:
Masse des ersten Massepunkts
Masse des zweiten Massepunkts
Abstand der Massepunkte
Gravitationskonstante G = 6.673⋅10–11 m3kg–1s–2
Formel (2.1) liefert nur den Betrag der Gravitationskraft FG, die Richtung der Kraft liegt auf der
Verbindungslinie der beiden Massepunkte, wobei es sich bei der Gravitation immer um eine anziehende Kraft handelt. Die Gravitationskräfte machen sich im täglichen Leben erst bei grossen Massen bemerkbar (Sonnensystem!).
Experimentell hat man festgestellt, dass geladene Körper zusätzliche Kräfte aufeinander ausüben
(meistens viel grösser als die Gravitationskräfte). Diese Kräfte, werden Coulombsche Kräfte genannt; wobei sich Ladungen mit gleichem Vorzeichen abstossen und ungleichnamige Ladungen
anziehen.
Das Coulombsche Kraftgesetz für Punktladungen (keine räumliche Ausdehnung) lautet:
Q2
F
-
F
Q1
+
FC =
a
1
Q ⋅Q
⋅ 1 2 2
4π ⋅ ε
a
Figur 2-1: Coulombsches Kraftgesetz
wobei Q1:
Q2:
a:
ε:
Ladung des ersten Punktes
Ladung des zweiten Punktes
Abstand der Punktladungen
Permittivität des Mediums (in Vakuum und Luft setzt man ε = ε0 )
(2.2)
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
14
2.1.2 Feldbegriff (Faraday)
Bei beiden Kraftgesetzen (2.1) und (2.2) nimmt der Betrag der Kraft quadratisch mit dem Abstand
ab. Beide Kräfte treten auch im Vakuum auf, bedürfen also keines materiellen Mediums. Früher
wurden beide Kräfte als sogenannte Fernwirkkräfte bezeichnet; wobei für die „Übertragung der
Kräfte“ ein sogenannter Äther postuliert wurde. Diesem Äther wurden ganz spezielle physikalische
Eigenschaften zugeschrieben; es wurde sogar versucht, die Relativgeschwindigkeit der Erde zu
diesem Äther zu messen. Heute (oder seit Faraday) verwendet man zur Erklärung dieser Kraftgesetze das „Feldmodell“ (Nahwirkungskräfte).
Jede Ladung (Masse) verändert in ihrer Umgebung den Zustand des Raumes derart, dass auf
andere Ladungen (Massen) Kraftwirkungen ausgeübt werden. Diesen besonderen Zustand des
Raumes bezeichnet man als elektrisches
H Feld (Gravitationsfeld). Das elektrische Feld wird in jedem Raumpunkt durch einen Vektor E beschrieben, der in die Richtung der Kraft weist, die das
elektrische Feld auf eine positive Probeladung ausübt. Figur 2-2 zeigt eine Punktladung Q1 mit
ihrem elektrischen Feld. Ist q2 nun eine positive Testladung, so wird damit die Definition für die
elektrische Feldstärke:
Definition der elektrischen Feldstärke:
Feldstärke = Kraft / Probeladung
F
+
+
Q1
r
H
H F
E=
q2
q2
(2.3)
mit q2: positive Testladung (Probeladung)
Figur 2-2: Punktladung Q1 und Testladung q2 zusammen mit Vektorpfeilen, die den Betrag und die Richtung
des E-Feldes anzeigen
Setzt man das Coulombsche Kraftgesetz (2.2) in obiger Definition (2.3) für die Feldstärke ein, so
erhält man für die elektrische Feldstärke der Punktladung Q1:
H H H
E r = er ⋅
bg
Q1
4πε ⋅ r 2
(2.4)
H
H
wobei er : Einheitsvektor in Richtung r
r: Abstand vom Q1
Auch die Gravitationsfeldstärke wird definiert als Kraft/Probemasse: g = F/m. So „füllt/durchdringt“ also eine Masse M den ganzen Raum mit ihrem Gravitationsfeld.
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
15
Im Feldmodell ist eine Punktladung Q von einem elektrischen Feld E (Vektorfeld)
umgeben, das den ganzen Raum durchdringt.
Ladungen sind die Quellen des elektrischen Feldes.
Beide Felder (elektrisches Feld und Gravitationsfeld) sind „Kraftfelder“, d.h. für ihre Definitionen
wird die physikalische Grösse der Kraft verwendet.
Stellt man Kräfte auf Ladungen fest, so ist die Ursache ein elektrisches Feld
Stellt man Kräfte auf Massen fest, so ist die Ursache ein Gravitationsfeld
Nicht jedes Feld ist wie das elektrische Feld und das Gravitationsfeld durch das Auftreten von Kraftwirkungen gekennzeichnet und damit ein „Kraftfeld“, das durch einen Vektor beschrieben wird. Für jeden Raumpunkt kann man beispielsweise eine Temperatur als skalare Grösse angeben. Man spricht dann von einem Temperaturfeld. Ebenso könnte
jedem Raumpunkt ein Luftdruck zugeordnet werden (siehe Wetterkarten). Die Angabe der Windrichtung mit der Windstärke für jeden Raumpunkt würde dann wieder ein vektorielles Feld beschreiben.
Zur Darstellung elektrischer Felder oder allgemein von Feldern, die durch einen Feldvektor beschrieben werden bedient man sich der Feldlinien (Vektorlinien, Kraftlinien). Diese geben in jedem
Raumpunkt die Richtung des Feldvektors an. Solche Feldbilder vermitteln einen anschaulichen
Überblick über den Verlauf des Feldes (siehe Titelblatt). Jedoch beachte man sehr genau:
Feldlinien sind keine physikalische Realität. Es sind gedachte Linien, eine Hilfsvorstellung zur
Darstellung der Richtung der Feldvektoren an jeder Stelle des betrachteten Raumgebietes.
In der nächsten Figur sollen an zwei Beispielen die Feldlinien „von Hand“ eingetragen werden:
Figur 2-3: Darstellung zweier Felder mit Vektorpfeilen zum Eintragen der Feldlinien (in der Ebene)
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
16
2.1.3 Arbeit im Feld, Spannung und Potential
Werden im Gravitationsfeld Massen verschoben, so benötigt man dazu Arbeit. Bei der Gravitation
handelt es sich um ein sog. Potentialfeld (→ Physik, Mathematik), d.h. die zu leistende Arbeit
(wenn eine Masse von A nach B transportiert wird), hängt nicht vom gewählten Weg ab, sondern
nur von der Höhendifferenz zwischen A und B.
Wird im elektrischen Feld eine Ladung q verschoben, so benötigt man dazu Arbeit. Beim hier eingeführten elektrischen Feld (Ladungen als Ursache) handelt es sich ebenfalls um ein Potentialfeld.
Deshalb hängt die Arbeit beim Verschieben einer Ladung nicht vom Weg ab, d.h. für verschiedene
Wege von A nach B ergibt sich immer der gleiche Wert für die Arbeit. Im elektrischen Feld berechnet sich diese Arbeit wie folgt (die Formel wird erst später verständlich):
z
z
B
r r
r r
= F o ds = q ⋅ E o ds
B
WAB
A
(2.5)
A
wobei q: verschobene Ladung
WAB: vom Feld abgegebene Arbeit
Folgende Figur zeigt Ladungstransporte von A nach B über verschiedene Wege.
W1
q
E
W2
A
W1 = W2 = W3 = WAB
E
(unabhängig vom Weg)
B
W3
Figur 2-4: Die Ladung q wird über verschiedene Wege im elektrischen Feld von A nach B transportiert
Diese (wegunabhängige) Arbeit führt jetzt direkt zur Definition der elektrischen Spannung:
Spannung = Arbeit / Ladung
U AB =
z
B
r r
WAB
= E o ds
q
A
(2.6)
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
17
Mit dieser Definition kann in obiger Figur nun die Spannung UAB eingetragen werden. Die Ladung
q kommt jetzt nicht mehr vor, dafür wird die Arbeit WAB durch die Spannung UAB „ersetzt“:
Für die Spannung UAB wird nun ein
gerichteter Spannungspfeil eingetragen.
Der Pfeil erinnert an das Wegintegral für
die Arbeit (siehe Figur 2-4).
Die Reihenfolge der Indizes in UXY und
die Pfeilrichtung des Spannungspfeils sind
zugeordnet:
UAB
E
E
UAB
A
B
UAB
UXY wird an einen Spannungspfeil
angeschrieben, der von X nach Y zeigt.
Figur 2-5: Spannung UAB zwischen den Punkten A und B im elektrischen Feld
Zusammen mit der Spannung wird häufig auch das (elektrische) Potential eingeführt. Die Spannung
wird stets zwischen zwei Punkten angegeben, das Potential hingegen wird einem Punkt im Raum
zugeordnet (entspricht dann einem skalaren Feld). Für die Einführung des Potentials wird ein Punkt
im Raum zum sogenannten Potentialnullpunkt (Bezugspunkt) erklärt. Von allen anderen Punkten
wird die Spannung gegenüber diesem Bezugspunkt gemessen. Schliesslich wird jedem Punkt P
diese Spannung als Potential zugeordnet. Die Wahl des Bezugspunktes (mit V = 0) ist willkürlich
und frei. Figur 2-6 zeigt dieses Vorgehen:
B
A
B
B
VB = UB0
UAB
UCB
C
UCA
A
A
UB0
VA = UA0
C
UA0
0
UC0
C
VC = UC0
0
V=0
Figur 2-6: Einführen des Potentials
Für den Zusammenhang zwischen Potential und Spannung ergibt sich damit (für obiges Beispiel):
UAB = VA – VB
UCB = VC – VB
UCA = VC – VA
VA = VB + UAB = VC – UCA
VB = VC – UCB = VA – UAB
VC = VA + UCA = VB + UCB
oder allgemeiner:
U pq = Vp − Vq
(2.7)
Für das Potential verwenden wir das Formelzeichen V, (alternativ wird auch ϕ verwendet). Potential
und Spannung haben dieselbe Einheit (Volt). Sind die Potentiale zweier Punkte gegeben, so berechnet sich daraus die Spannung zwischen diesen Punkten als Potentialdifferenz.
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
18
Wird in einer Anordnung (elektrisches Netzwerk) ein anderer Potentialnullpunkt gewählt, so ändern
sich alle Potentiale um einen bestimmten Wert, die Spannungen hingegen bleiben unverändert.
Die nächste Skizze soll dies an einem Beispiel mit Zahlenwerten verdeutlichen.
0V
a
-25 V
b
0V
60 V
230 V
150 V
a
55 V
c
b
-115 V
c
160 V
80 V
b
0V
a
c
-10 V
Figur 2-7: Potentiale der Punkte a, b und c mit drei unterschiedlichen Potentialnullpunkten. Man kontrolliere, dass die
Spannungen zwischen den Punkten (a, b, c) unabhängig von der Wahl des Potentialnullpunktes sind.
Im allgemeinen bezieht man das Potential entweder auf einen unendlich weit entfernten Punkt
(Physik) mit V0 = 0 oder man betrachtet die Erdoberfläche als Ebene mit überall gleichem Potential.
Plaziert man eine Ladung q im Punkt P, der das Potential V(P) aufweist, so ergibt das Produkt
q⋅V(P) gerade die potentielle Energie der Ladung q gegenüber dem Potentialnullpunkt.
2.1.4 Strom
Ein elektrischer Strom ist die Bewegung von Ladungsträgern. Der Begriff „Strom“ steht somit für
„Ladungsfluss“, und dieser kann bildhaft mit strömendem Wasser verglichen werden. Der Strom
kann sowohl durch Bewegung positiver oder negativer Ladungsträger allein, als auch durch gleichzeitige Bewegung beider Ladungsträger entstehen. Ein elektrischer Strom in Metallen ist stets eine
Bewegung der Elektronen, also negativer Ladungsträger. Freie Protonen kommen in technischen
Anwendungen nicht vor. Bei der Bewegung positiver Ladungsträger handelt es sich immer um positive Ionen (Stromleitung in Flüssigkeiten bzw. Gasen) oder um Fehlstellen in Kristallen
(Stromleitung in Halbleitern). Bei Flüssigkeiten und Halbleitern kann auch die gleichzeitige Bewegung positiver und negativer Ladungsträger auftreten.
In einem Leiter, durch dessen Querschnitt die Ladung Q = n⋅e in der Zeit t hindurchtritt, ist
die Stromstärke I nach (1.1):
Q
I=
(2.8)
t
Einen solchen zeitlich konstanten Strom nennt man Gleichstrom. Einheit der elektrischen Stromstärke ist das Ampere (A), eine Grundeinheit nach Kap. 1.2.2. Bezogen auf eine Fläche A, durch die
der Strom tritt, ist ferner die Stromdichte:
J=
I
A
(2.9)
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
19
Im allgemeinen Fall wird ein Strom nicht zeitlich konstant sein, sondern in jedem Zeitpunkt einen
anderen Augenblickswert (Momentanwert) i haben. Es ist daher die elektrische Stromstärke definiert als
bg
it =
bg
dq t
dt
(2.10)
Aus Figur 2-8 entnimmt man, dass der Momentanwert i eines elektrischen Stromes positiv oder
negativ sein kann.
i(t)
i(t)
0
t
Figur 2-8: Zeitlicher Verlauf eines Wechselstromes
Man ordnet dem elektrischen Strom eine positive Zählrichtung zu, welche der Bewegungsrichtung
positiver Ladungsträger im Leiter entsprechen würde, also vom Pluspol zum Minuspol, und kennzeichnet diese positive Zählrichtung durch einen entsprechenden Zählpfeil.
Die positive Zählpfeilrichtung des Strome ist ausserhalb einer Energiequelle vom Pluspol zum Minuspol
festgelegt und entspricht der Bewegungsrichtung positiver Ladungsträger.
{ .... Aufg2-16}
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
20
2.1.5 Widerstand
Die Bewegung von Ladungsträgern in Leitern geschieht nicht „reibungslos“. Jeder Leiter setzt unter
Normalverhältnissen dem Fliessen des Stromes einen „elektrischen Widerstandes“ entgegen. Hat
dabei eine Leiteranordnung, z.B. ein Verbraucher, zwei Anschlussklemmen, so bildet er einen
Zweipol nach Figur 2-9. Beim Anschliessen einer Spannung U an die Zweipolklemmen wird ein
Strom I durch den Zweipol fliessen und im allgemeinen um so grösser sein, je grösser die angelegte
Spannung U. Enthält der Zweipol keine elektrische Energiequelle (passiver Zweipol) und setzt man
R=
U 1
= ,
I G
(2.11)
so ist R der elektrische Widerstand und sein Kehrwert G = 1/R der elektrische Leitwert des Zweipols, wobei auch im Folgenden R als konstant, d.h. unabhängig von der angelegten Spannung U
angenommen werden soll. Eine n-fache Spannung ergibt dann auch einen n-fachen Strom.
i
I
c
a
U
b
u
Figur 2-9: Zweipol als Verbraucher
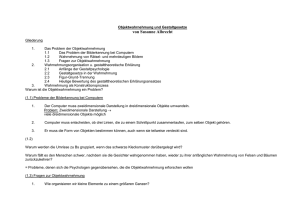
Figur 2-10: Strom-Spannungskennlinie verschiedener
Widerstände. a linearer Widerstand, b,c nichtlineare Widerstände
Den Widerstand eines solchen Zweipols bezeichnet man ebenso wie den Zweipol als linear. Gleichung (2.11) heisst Ohmsches Gesetz (→ siehe später). Ist der Widerstand konstant, so ist die
Strom-Spannungskennlinie nach Figur 2-10a eine Gerade (linearer Widerstand).
R bzw. G können auch nicht konstant, d.h. strom- oder spannungsabhängig sein. Die Kennlinie verläuft dann nichtlinear
wie z.B. die Kurven b und c in der Figur 2-10. Der Quotient u/i = f(i) ergibt einen nichtlinearen Widerstand. Insbesondere erhält man bei einem fallenden Kennlinienstück einen sogenannten negativen differentiellen Widerstand
r=
∆u
du
→
,
∆i
di
abgekürzt auch als negativer Widerstand bezeichnet. Halbleiterbauelemente haben im Allgemeinen einen nichtlinearen
Widerstand.
Die Einheit des elektrischen Widerstandes ist das Ohm (Ω) nach Kap. 1.2.3. Die Einheit des elektrischen Leitwerts ist das Siemens (S) oder (Ω–1).
Der elektrische Widerstand ist eine Materialgrösse. Für einen Draht aus homogenem Leitermaterial,
z.B. Kupfer oder Aluminium der Länge l mit dem überall gleichen Querschnitt A wird der Widerstand offenbar um so grösser sein, je länger der Draht und je kleiner der Querschnitt ist, d.h.
R ~ l/A. Allgemein erhält man daher für einen linearen Leiter der Länge l mit dem überall gleichen
Querschnitt A:
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
R=
l
ρ ⋅l
=
A σ⋅A
21
(2.12)
Darin sind ρ (Rho) der spezifische Widerstand und σ = 1/ρ (Sigma) der spezifische Leitwert oder
die Leitfähigkeit des Leitermaterials als Proportionalitätsfaktoren. Die Einheiten sind [ρ] = Ωm
und [σ] = S/m = 1/(Ωm). Tabelle 2-1 zeigt eine grobe Übersicht der Leitfähigkeiten.
Tabelle 2-1: Übersicht der Leitfähigkeiten
Material
Typ
Leitfähigkeit in 1/(Ωm)
Quarz
Silikonöl
Mica
Paraffin
Isolator
Isolator
Isolator
Isolator
~ 10-17
~ 10-15
~ 10-15
~ 10-15
Hartgummi
Porzellan
Glas
Bakelit
Destilliertes Wasser
Isolator
Isolator
Isolator
Isolator
Isolator
~ 10-15
~ 10-14
~ 10-12
~ 10-9
~ 10-4
schlechter Isolator
schlechter Isolator
schlechter Isolator
schlechter Isolator
~ 10-3
~ 10-2
~ 10-2
4⋅10-2
schlechter Leiter
schlechter Leiter
Halbleiter
0.4
0.7
~2
Meerwasser
Tellur
Leiter
Leiter
~4
~ 5⋅102
Kohle
Graphit
Gusseisen
Quecksilber
Chromnickel
Leiter
Leiter
Leiter
Leiter
Leiter
~ 3⋅104
~ 105
~ 106
106
106
Konstantan
Blei
Zinn
Bronze
Messing
Zink
Wolfram
Leiter
Leiter
Leiter
Leiter
Leiter
Leiter
Leiter
2⋅106
5⋅106
9⋅106
107
1.1⋅107
1.7⋅107
1.8⋅107
Aluminium
Aluminium hartgezogen
Gold
Kupfer
Silber
Leiter
Leiter
Leiter
Leiter
Leiter
3.0⋅107
3.5⋅107
4.5⋅107
5.7⋅107
6.1⋅107
Supraleiter
~∞
Sandige Erde, trocken
Feuchte Erde
Frischwasser
Tierisches Fett
Tierischer Muskel
Tierisches Blut
Germanium (rein)
Nb3(Al-Ge)
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
22
Man beachte den enormen Wertebereich für die Leitfähigkeit zwischen gutem Isolator und gutem
Leiter (mehr als 20 Dekaden!!).
Häufigste Leiterwerkstoffe sind Kupfer und Aluminium. Für Kontakte werden auch Gold,
Silber und Wolfram eingesetzt. Als Glühfäden in Glühlampen findet man Wolfram, als Heizleiter
meist Chromnickel. Für Messwiderstände werden insbesondere Manganin und Konstantan wegen
ihrer besonderer thermischen Eigenschaften verwendet.
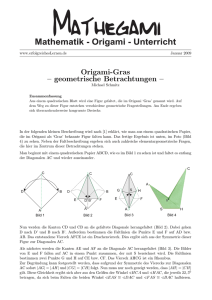
Der elektrische Widerstand eines Leiters ist temperaturabhängig. Bei den meisten Metallen nimmt der Widerstand mit der Temperatur zu. Für Metalle zeigt Figur 2-11 den charakteristischen Verlauf des Widerstandes R = f(T) - und somit auch des spezifischen Widerstandes ρ.
R
R = f(T)
Rw
R20
-273°C
0°C
20°C
Figur 2-11: Temperaturabhängigkeit eines
Widerstandes (Metalle)
T
Tw
Die nichtlineare Temperaturabhängigkeit von Figur 2-11 wird für den unteren Bereich (bis etwa
200°C) mit dem folgenden Ansatz linearisiert:
b
Rw = R20 ⋅ 1 + α 20 ⋅ Tw − 20° C
wobei R20:
Rw:
Tw:
α20:
g
(2.13)
Widerstandswert bei 20°C
Widerstandswert bei der Temperatur Tw
Temperatur des Widerstandes in °C
Temperaturkoeffizient in 1/°C (linearer Term)
Für höhere Temperaturen (ab etwa 200°C) wird zusätzlich noch ein quadratischer Term in der
Näherung eingefügt:
b
g
b
Rw = R20 ⋅ 1 + α 20 ⋅ Tw − 20° C + β 20 ⋅ Tw − 20° C
mit
g
2
(2.14)
β20: Temperaturkoeffizient in (1/°C)2 (quadratischer Term)
Die Temperaturkoeffizienten (Temperaturbeiwerte) α und β hängen ebenfalls von der Temperatur
ab und werden meist als α20 und β20 auf die Temperatur von 20°C bezogen.
Der Temperaturkoeffizient α kann auch negative Werte annehmen (Heissleiter), so dass der
Widerstand mit steigender Temperatur abnimmt (Kohlefadenlampe). Die meisten in der
Elektrotechnik häufig eingesetzten Metalle haben einen Temperaturbeiwert in der Nähe von α =
0.004 K–1. Man kann sich daher merken, dass Widerstände bei einer Temperaturänderung um je 1 K
ihren Wert um etwa 0.4% ändern.
Tabelle 2-2 zeigt eine Zusammenstellung der Temperaturkoeffizienten für die wichtigsten
Leitermaterialien.
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
23
Tabelle 2-2: Leitfähigkeiten und Temperaturbeiwerte
Leitfähigkeit in 1/(Ωm)
α20 in 1/K
β20 in 1/K2
Silber
Kupfer (weich)
Gold
Aluminium
Zink
Wolfram
6.1⋅107
5.7⋅107
4.5⋅107
(3.3...3.6)⋅107
1.65⋅107
1.82⋅107
3.8⋅10-3
(3.9...4.3)⋅10-3
4.0⋅10-3
(4.2...5.0)⋅10-3
3.7⋅10-3
4.1⋅10-3
0.7⋅10-6
0.6⋅10-6
0.5⋅10-6
1.3⋅10-6
1.0⋅10-6
1.0⋅10-6
Messing
Nickel
Platin
Zinn
(1.1-1.59)⋅107
(1.0-1.5)⋅107
1.02⋅107
0.83⋅107
(1.5...4.0)⋅10-3
(3.7...6.0)⋅10-3
(2...3)⋅10-3
4.2⋅10-3
1.6⋅10-6
9.0⋅10-6
0.6⋅10-6
6.0⋅10-6
0.232⋅107
0.2⋅107
0.22⋅107
0.01⋅10-3
0.01⋅10-3
–0.01⋅10-3
-
Material
Manganin
Konstantan
Novokonstant
{Aufg2-17 ... Aufg2-21}
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
24
2.2 Der einfache Gleichstromkreis
2.2.1 Zählpfeile und Zählpfeilrichtungen
Zählpfeile (Bezugspfeile) geben an, mit welchem Vorzeichen die einzelnen Strom- und Spannungsgrössen in die Netzwerkgleichungen eingehen. Dabei beachte man:
Zählpfeile bedeuten eine Rechenvorschrift. Sie sagen nichts darüber aus, ob die Grössen, denen sie
zugeordnet werden, diese Richtung oder überhaupt eine Richtung haben. Zählpfeile können daher
auch skalaren Grössen zugeordnet werden.
Der Richtungssinn für den Strom wird in Übereinstimmung mit der Bewegungsrichtung positiver
Ladungsträger (konventionelle Stromrichtung) festgelegt. Der Bezugspfeil wird in den Leitungszug
gezeichnet. Er kann mit dem Richtungssinn der Stromstärke übereinstimmen, oder ihm entgegengerichtet sein (Figur 2-12).
Richtungssinn
I
I1 = 1.5 A
I2 = -1.5 A
Figur 2-12: Zusammenhang zwischen dem Bezugspfeil
und dem Richtungssinn am Beispiel eines Stromes mit
der Stromstärke 1.5 A
Der Bezugssinn einer Spannung zwischen zwei Punkten kann durch die Bezeichnung dieser Punkte,
z.B. 1 und 2, angegeben werden. Das Formelzeichen für die Spannung erhält dann einen Doppelindex, wobei die Reihenfolge der Indizes den Bezugssinn angibt:
U12 = V1 – V2
U21 = V2 – V1
Bei Verwendung eines Bezugspfeils kann der Doppelindex auch entfallen (Figur 2-13).
1
1
+
-
UA
2
+
-
UB
2
U12 = V1 - V2 = 9 V
U21 = V2 - V1 = -9 V
oder UA = 9 V
oder UB = -9 V
Figur 2-13: Zusammenhang zwischen Bezugspfeil, Vorzeichen der Spannung und Klemmenbezeichnung am Beispiel
einer 9 V-Batterie
Beachte: In der amerikanischen Netzwerkliteratur wird der Spannungspfeil für die positive Bezugsrichtung oft
von Minus nach Plus gezeichnet.
24
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
25
Wie sollen nun an einem allgemeinen Zweipol (Eintor) die Bezugsrichtungen (Pfeile) festgelegt
werden? Es existieren zwei Möglichkeiten, nämlich das sog. Verbraucherzählpfeilsystem (VZS)
und das sog. Erzeugerzählpfeilsystem (EZS). Figur 2-14 zeigt beide Systeme an einem allgemeinen
1-Tor.
I
I
U
U
Figur 2-14: VZS und EZS an einem allgemeinen 1-Tor
EZS
VZS
Handelt es sich beim 1-Tor um einen Verbraucher, so wird das Produkt aus U⋅I (Leistung) beim
VZS positiv (und beim EZS negativ). Ist das 1-Tor aber eine Quelle, so wird das Produkt U⋅I beim
VZS negativ (und beim EZS positiv). Prinzipiell können an jedem Eintor die Bezugspfeile für I und
U beliebig gewählt werden. Häufig wird bei einer Quelle das EZS und bei einem Verbraucher das
VZS angewendet. Man spricht dann von einem gemischten System (zweckmässigster Fall!).
2.2.2 Das Ohmsche Gesetz
In einem linearen Leiter sind Strom und Spannung zueinander proportional. Für Gleichstrom gilt
das Ohmsche Gesetz in der Form
I=
U
= U ⋅G
R
(2.15)
Bei einem linearen Leiter ist der ihn durchfliessende Strom der angelegten Spannung proportional
und dem Leiterwiderstand gegenüber umgekehrt proportional.
Das Ohmsche Gesetz ist ein Grundgesetz des elektrischen Stromes in Leitern. Als Ohmschen Widerstand bezeichnet man einen idealen Zweipol, bei dem das ohmsche Gesetz unabhängig von äusseren Einflüssen stets erfüllt ist. Ein ohmscher Widerstand ist ein linearer passiver Zweipol; seine IU-Kennlinie ist eine Gerade (Figur 2-15).
I
R "klein"
U
R
I
R "gross"
U
Figur 2-15: Schaltzeichen und I-U-Kennlinien von
ohmschen Widerständen
{Aufg2-23 ... Aufg2-27}
25
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
26
2.2.3 Die Kirchhoffschen Gesetze
Eine Verzweigung, der sich ein Potential zuordnen lässt, kann aus mehreren Verzweigungspunkten
bestehen; sie wird als Knoten (node) bezeichnet. An einem Knoten wird in einem Teil der
Leitungen Ladungen zu diesem hinbewegt; in den übrigen Leitungen wird Ladung vom Knoten
wegbewegt. Da im Knoten keine Ladung „angehäuft“ werden kann, ist in jedem Zeitpunkt ∆t die
Summe der zufliessenden Ladung gleich der Summe der abfliessenden Ladung.
In jedem Knoten ist die Summe der zufliessenden Ströme gleich der Summe der abfliessenden Ströme.
Wir wollen diesen Satz Knotensatz nennen; er wird auch als 1. Kirchhoffscher Satz bezeichnet.
I1 + I2 + I3 = 0
I2
n
I1
å Iυ = 0
υ =1
(2.16)
I3
Figur 2-16: Knotensatz (Stromverzweigung)
Der Knotensatz lässt sich verallgemeinern: Wir betrachten ein Raumgebiet („Superknoten“), das
von einer Hüllfläche umgeben ist; auch hier gilt der Knotensatz (für jeden Zeitpunkt):
I1
I6
beliebiges
Netzwerk
I5
I2
I3
I4
I1 + I2 + I3 + I4 + I5 + I6 = 0
Figur 2-17: Knotensatz beim Superknoten (Raumgebiet)
Im allgemeinen liegt an einem Knoten einer Schaltung keine einheitliche Zuordnung der
Bezugspfeile vor. Gleichung (2.16) ist nur gültig, wenn alle Bezugspfeile zum Knoten hin
gerichtet sind, oder alle Bezugspfeile vom Knoten weg gerichtet sind. Wenn nicht alle Bezugspfeile einheitlich ausgerichtet sind, werden in (2.16) die Ströme mit den entsprechenden Vorzeichen
versehen. Figur 2-18 zeigt dieses Vorgehen an einem Beispiel:
I1
I2
I3
I4
I5
I6
I1 - I2 + I3 - I4 + I5 - I6 = 0 oder -I1 + I2 - I3 + I4 - I5 + I6 = 0
Figur 2-18: Knotensatz bei beliebigen Bezugspfeilen für die Ströme
26
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
27
In einer beliebigen, aus mehreren Zweipolen gebildeten Schaltung lassen sich geschlossene
Umläufe bilden, die man als Maschen (mesh) bezeichnet. Eine Masche ist ein beliebiger, in sich
geschlossener Weg in einem Schaltungsgebilde, der nicht über Leiter geführt zu sein braucht.
Wird in einem Potentialfeld eine Ladung vom Ausgangspunkt A aus bewegt und
wieder zurück zum Punkt A gebracht (geschlossener Weg = Masche), so ist die
verrichtete Arbeit Null und somit ist auch die Spannung Null.
Damit folgt direkt und einsichtig der Maschensatz (2. Kirchhoffscher Satz):
In jeder Masche ist die Summe aller Spannungen (Umlaufspannung) gleich Null.
U1 + U2 + U3 + U4 = 0
1
2
U1
n
U4
4
åU
Masche
U3
k
=0
k =1
U2
(2.17)
3
Figur 2-19: Maschensatz (Umlaufspannung = 0)
Für die Gültigkeit von (2.17) muss ein Umlaufsinn festgelegt werden; die Bezugspfeile für alle
Spannungen sind dann entsprechend dem Umlaufsinn zu orientieren. Wenn der Bezugssinn einer
Spannung nicht mit dem Umlaufsinn übereinstimmt, dann wird beim Aufstellen der Maschengleichung diese Spannung mit dem entsprechenden Vorzeichen versehen. Figur 2-20 zeigt dazu ein
Beispiel:
U2
U1
U3
Umlaufsinn
U5
U1 - U2 + U3 + U4 - U5 = 0
U4
Figur 2-20: Maschensatz mit beliebigen Bezugspfeilen für die Spannungen
In Figur 2-19 und Figur 2-20 sind absichtlich keine Netzwerkelemente gezeichnet, der Maschensatz
ist für einen geschlossenen Umlauf gültig, unabhängig davon, welche und wieviele Netzwerkelemente an den Knoten angeschlossen sind.
Ohmsches Gesetz, Knotensatz und Maschensatz sind drei grundlegende Gesetze, mit denen
schon allgemeine Netzwerkprobleme gelöst werden können (siehe Kap. 2.3.1). Im Allgemeinen
werden Knoten- und Maschensatz benötigt, um eine Netzwerkaufgabe zu lösen.
{Aufg2-28 ... Aufg2-29}
27
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
28
2.2.4 Leistung und Arbeit
Wird ein Leiter an eine Gleichspannung U angeschlossen, so fliesst durch ihn ein Strom I. Ist Q
dabei die durch den Leiterquerschnitt hindurchtretende Ladung, so ist zum Überwinden des
Leiterwiderstandes R nach (2.6) die Energie W = Q⋅U erforderlich; es muss also die Arbeit W
geleistet werden, um den Strom I durch den Leiter aufrecht zu erhalten. Die Energie W muss von der
speisenden Quelle als Energiequelle aufgebracht werden. Praktisch interessiert weniger die Arbeit,
sondern wie schnell diese Arbeit geleistet werden muss; das ist die Leistungsaufnahme P des
betrachteten Leiters vom Widerstand R.
Bei Gleichstrom ist P = W/t. Die von einem Zweipol mit Widerstand R aufgenommene Leistung ist somit bei Gleichstrom:
U2
P =U ⋅I = I ⋅R =
R
2
(2.18)
Für die Arbeit ergibt sich bei Gleichstrom:
W = U ⋅ I ⋅t
(2.19)
[P] = Watt (W)
[W] = Wattsekunde (Ws) = Joule (J) = Newtonmeter (Nm)
Die von einem stromdurchflossenen Leiter aufgenommene Leistung dient zur Erwärmung des Leiters; er kann dabei bis zur Glühtemperatur erhitzt werden (Glühlampen, Lichterzeugung), oder sogar
schmelzen. Nach dem Energiesatz muss die aufgenommene Energie stets gleich der abgegebenen
Energie sein.
Die in einem Widerstand verbrauchte Energie wird restlos in Wärme umgewandelt.
Ein elektrischer Widerstand ist demnach ein Energiewandler. Überhaupt ist jeder Verbraucher elektrischer Energie stets ein Energiewandler, der elektrische Energie z.B. in Wärme oder mechanische
Energie umwandelt.
In technischen Geräten ist die nutzbare abgegebene Leistung Pab um die Verlustleistung Pverl (kurz:
Verluste) kleiner als die zugeführte Leistung Pzu. Die Leistungsbilanz lautet: Pzu = Pab + Pverl. Anstelle der Verluste wird häufig der Wirkungsgrad η (Eta) eines Gerätes angegeben:
η=
Pab
≤1
Pzu
(2.20)
28
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
29
Figur 2-21 zeigt einen Stromkreis, bei dem Erzeuger, Leitungen und Verbraucher verlustbehaftet
sind.
PL verl
Pq verl
Pv verl
Erzeuger
Pq zu
Verbraucher
Pv zu
Pq ab
Pv ab
Leitung
Figur 2-21: Leistungen im Stromkreis
{Aufg2-30 ... Aufg2-33}
2.2.5 Elemente von Stromkreisen (Begriffe)
Zur Darstellung von Stromkreisen oder Netzwerken werden Symbole, Schaltzeichen und
Konventionen benützt. Wir verwenden folgende idealisierte Bauelemente (Eintore):
Bauteil
Symbol
Spannungsquelle
Uq
Stromquelle
Iq
Widerstand
Schaltzeichen
R
Die Spule und der Kondensator
werden später eingeführt
(Verhalten im Zeitbereich).
Diese Bauteile stellen idealisiertes Verhalten dar, sie haben die folgenden charakteristischen
Eigenschaften:
Die (ideale) Spannungsquelle liefert eine konstante Spannung bei beliebigem Strom (je nach Belastung).
Die (ideale) Stromquelle liefert einen konstanten Strom bei beliebiger Spannung (je nach Belastung).
Der Widerstand R ist linear und konstant (keine äusseren Einflüsse).
Werden die verwendeten Schaltzeichen (Eintore) mit Zählpfeilen versehen, so kann wahlweise mit
dem VZS oder EZS gearbeitet werden (Kap. 2.2.1).
Besitzt ein Netzwerk Eingangsklemmen (Tor) und Ausgangsklemmen (Tor), so bezeichnet
man dieses als Zweitor. Figur 2-22 zeigt die Eintor- und Zweitordarstellung mit Zählpfeilen.
29
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
30
1
I
U
1 - Tor
1
I1
U1
1'
2
2 - Tor
1'
I2
U2
2'
Figur 2-22: Eintor (1-Tor) und Zweitor (2-Tor) mit Zählpfeilen und Klemmenbezeichnung
Die Klemmenbezeichnungen 1-1´ und 2-2´ sollen die zusammengehörenden Klemmen kennzeichnen. Tor 1 wird also aus den Klemmen 1 und 1´ gebildet, zu Tor 2 gehören die Klemmen 2 und 2´.
Die Tore müssen nicht „elektrischer Natur“ sein, z.B. könnte Tor 2 der akustische Ausgang eines
Lautsprechers darstellen.
1- und 2-Tore werden eingeteilt in passive, verlustlose und aktive 1- und 2-Tore. Dabei
muss noch zwischen aktivem n-Tor und aktiv wirkendem n-Tor unterschieden werden. 1- und 2Tore können in verschiedenen Betriebszuständen betrieben werden. So kann ein aktives 1-Tor
(Batterie) durchaus auch einen Betriebszustand aufweisen, wo es passiv wirkt, also Leistung aufnimmt. Die Begriffe sind in der folgenden Zusammenstellung erläutert. (Für Wechselströme mit
Spulen und Kondensatoren muss „Leistung“ durch „mittlere Leistung“ ersetzt werden.)
Passiver Betriebszustand (passiv wirkend)
Das n-Tor nimmt (in diesem Betriebszustand) mehr Leistung auf wie es abgibt.
Verlustloser Betriebszustand (verlustlos wirkend)
Das n-Tor nimmt (in diesem Betriebszustand) gleichviel Leistung auf wie es abgibt.
Aktiver Betriebszustand (aktiv wirkend)
Das n-Tor gibt (in diesem Betriebszustand) mehr Leistung ab wie es aufnimmt.
Passiv wirkend
Verlustlos wirkend
Aktiv wirkend
Kommentar
Passives n-Tor
Normalzustand
Möglich (speziell!)
Nicht möglich
Besitzt keine Quellen
Verlustloses n-Tor
Nicht möglich
Normalzustand
Nicht möglich
Enthält nur verlustlose
Elemente (L, C, M)
Aktives n-Tor
Möglich
Möglich
Möglich
(Normalzustand)
Muss Quellen besitzen
Die Untersuchung eines allgemeinen n-Tores auf die verschiedenen Betriebszustände ist eine relativ
aufwendige Angelegenheit; bei einfacheren Netzwerken (1- und 2-Tore) kann rasch über mögliche
aktive/passive/verlustlose Betriebszustände entschieden werden.
{Aufg2-34}
30
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
31
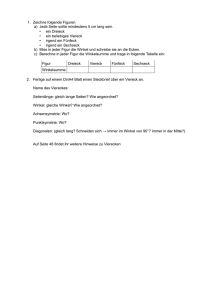
Ein elektrisches Netzwerk, das Eintore und Zweitore enthält, wird meistens zweidimensional betrachtet und daher wie in Figur 2-23 in der Ebene ausgebreitet. Die Schaltung enthält die eben eingeführten Schaltzeichen, die idealisierte Bauelemente verkörpern.
R1
U1
a
R2
I2
R7
R5
R3
b
R6
Figur 2-23: Netzwerk
(Knoten, Zweige und Maschen)
R4
c
c
Die einzelnen Elemente sind durch Linien miteinander verbunden. Diese Verbindungslinien sind
widerstandslos und ohne jede andere Wirkung des elektrischen Stromes anzusehen. Will man z.B.
den ohmschen Widerstand von Zuleitungsdrähten berücksichtigen, so muss das explizit mit dem
Widerstandssymbol geschehen.
Im Knotenpunkt (Knoten) sollen i. A. mindestens 3 Verbindungsleitungen zusammentreffen. Die
Schaltung nach Figur 2-23 enthält also die Knoten a, b und c. Ein Zweig verbindet zwei Knoten;
obiges Netzwerk besitzt insgesamt 6 Zweige. Unter einer Masche versteht man einen in sich geschlossenen Kettenzug (also eine Ringschaltung) von Zweigen und Knoten. Geht man von irgend
einem Knoten aus, so durchwandert man eine Masche, wenn man, ohne irgend einen Zweig
mehrfach zu durchlaufen, zum Ausgangspunkt zurückkehrt. In obiger Schaltung kann man viele
Maschen bilden - z.B. die Masche aus den Bauelementen R2, R6 und R7, aber auch eine Masche aus
U1, R1, R2, R6 und R4.
2.2.6 Einfache Schaltungen von Widerständen
Mit Hilfe von Knotensatz, Maschensatz und Ohmsches Gesetz können nun für die Serieschaltung
und Parallelschaltung von Widerständen einfache Regeln hergeleitet werden.
a) Serieschaltung von Widerständen (Spannungsteilung)
I
U
R1
R2
R3
U1
U2
U3
I
U4
R4
U
RE
Figur 2-24: Serieschaltung von Widerständen und Ersatzwiderstand
Anwendung des Maschensatzes und des ohmschen Gesetzes liefert für obiges Netzwerk (links):
U = U1 + U2 + U3 + U4
U = I ⋅ (R1 + R2 + R3 + R4) = I ⋅ RE
damit ergibt sich für den Ersatzwiderstand RE:
RE = R1 + R2 + R3 + R4
31
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
32
und für die Spannungsteilung:
U1 R1
=
,
U
RE
U 2 R2
=
,
U
RE
U 3 R3
=
,
U
RE
U 4 R4
=
U
RE
oder in Worten:
Bei in Serie geschalteten Widerständen ist der Ersatzwiderstand die Summe der einzelnen Widerstände.
Bei in Serie geschalteten Widerständen teilt sich die Spannung proportional zu den Widerständen.
Als Beispiel wird ein unbelasteter Spannungsteiler gemäss Figur 2-25 untersucht. Die Spannungsquelle befindet sich auf der linken Seite, gemessen wird die Ausgangsspannung an den Klemmen 22´.
R1
1
U1
I=0 2
R2
U2
R2
1
=
=
U 1 R1 + R2 1 + R1
R2
U2
2'
1'
Figur 2-25: Spannungsteiler mit zwei Widerständen
Nun wird die Quelle bei 2-2´ angeschlossen und die Spannung bei 1-1´ gemessen. Wie gross wird
jetzt das Verhältnis für die Spannungsteilung? Kann obiges Resultat für diese Fragestellung verwendet werden? Wenn Sie das Spannungsteilerverhältnis Ua/Ub berechnen müssen, wo ist dann die
Quelle angeschlossen? Machen Sie sich ein klares Bild von den verwendeten Konventionen.
b) Parallelschaltung von Widerständen (Stromteilung)
I
I
I1
U
R1
G1
I2
R2
G2
I3
R3
G3
U
RE, GE
Figur 2-26: Parallelschaltung von Widerständen und Ersatzwiderstand
Anwendung des Knotensatzes und des ohmschen Gesetzes liefert für obiges Netzwerk (links):
I = I1 + I2 + I3
I = U ⋅ (G1 + G2 + G3) = U ⋅ GE
damit ergibt sich für den Ersatzleitwert GE:
GE = G1 + G2 + G3, 1/RE = 1/R1 + 1/R2 + 1/R3
und für die Stromteilung:
32
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
I1 G1
=
,
I GE
I 2 G2
=
,
I GE
33
I 3 G3
=
I GE
oder in Worten:
Bei parallel geschalteten Widerständen ist der Ersatzleitwert die Summe der einzelnen Leitwerte.
Bei parallel geschalteten Widerständen teilt sich der Strom proportional zu den Leitwerten.
{Aufg2-35 ... Aufg2-38}
2.2.7 Quellen, Ersatzschaltungen und Kennlinien
Man betrachte ein beliebiges lineares Netzwerk, das aus Widerständen, Spannungs- und Stromquellen besteht (in der Wechselstromtechnik: RLCM-Netzwerk mit Quellen). Nun wird das Netzwerk
an zwei Klemmen 1 und 1´ zugänglich gemacht (Interaktion mit der „Aussenwelt“). Belastet man
jetzt das Netzwerk, so sind Ua und Ia linear voneinander abhängig (Gerade in U-I-Kennlinie).
Ia
1
Ua
Ua
Ia
1'
Figur 2-27: Beliebiges lineares Netzwerk mit zwei Klemmen (1-Tor) und U-I-Kennlinie
Die lineare Abhängigkeit zwischen Ua und Ia kann z.B. in der Form Ua = α⋅Ia + β geschrieben
werden (Geradengleichung). Die beiden Grössen α und β (Parameter) hängen nicht von der
Belastung ab, (sondern) sie sind für ein gegebenes Netzwerk feste Werte (reelle oder komplexe
Zahlenwerte).
Das beliebige Netzwerk soll jetzt in seinem Innern durch ein möglichst einfaches
Ersatznetzwerk ersetzt werden, so dass die Wirkung nach aussen an den Klemmen
1 und 1´ unverändert bleibt. Ein äusserer Beobachter kann also nicht feststellen
(mit beliebigen Experimenten an den Klemmen 1-1´), dass im Innern das
(komplizierte) Netzwerk durch ein (einfaches) Ersatznetzwerk ausgetauscht
wurde.
Die einfachsten zwei Ersatznetzwerke sind eine ideale Spannungsquelle mit Seriewiderstand
oder eine ideale Stromquelle mit Parallelwiderstand. Figur 2-28 zeigt diese zwei Ersatznetzwerke
für ein beliebiges lineares Netzwerk. An dieser Stelle sei noch einmal deutlich festgehalten: Der
Ersatz geschieht bezüglich zweier wohldefinierter Klemmen; das Innenleben wird durch das
Ersatznetzwerk nicht nachgebildet. In Figur 2-28 sind absichtlich noch Umrandungen um die Er-
33
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
34
satzquellen gezeichnet; damit wird visualisiert, dass das Ersatznetzwerk nach aussen die gleiche
Wirkung wie das Originalnetzwerk aufweist.
Da diese beiden Ersatzschaltung sehr wichtig sind, erhalten sie eigene Namen: Die Spannungsquelle mit Seriewiderstand bezeichnet man als Thevenin’sche Ersatzschaltung. Der Ersatz mit
der idealen Stromquelle und dem Parallelwiderstand heisst Norton’sche Ersatzschaltung. Beide Ersatzschaltungen sind mit zwei Grössen vollständig (notwendig und hinreichend) beschrieben und
daher lässt sich auch gerade die Ua/Ia-Gerade (Figur 2-27) nachbilden. Die zwei Grössen (Uqe und
Rqe oder Iqe und Rqe) der Ersatzschaltung(en) sind nun mit geeigneten Überlegungen und
Experimenten an den Klemmen 1-1´ zu bestimmen.
1
Uqe
1
Ersatzschaltung
nach
Thevenin
Rqe
beliebiges
lineares Netzwerk
1'
1
Iqe
1'
Ersatzschaltung
nach
Norton
Rqe
1'
Figur 2-28: Die zwei einfachsten Ersatznetzwerke für ein lineares Netzwerk bezüglich der Klemmen 1-1´: TheveninErsatzschaltung und Norton-Ersatzschaltung
Zwei beliebige (unterschiedliche) Punkte auf der Ua-Ia-Geraden genügen (Figur 2-27), um die Ersatzschaltung nach Thevenin oder Norton vollständig zu beschreiben. Lässt man die Klemmen 1-1´
offen (Leerlauf), so misst man an ihnen die sog. Leerlaufspannung ULL, schliesst man die
Klemmen kurz, so fliesst der sog. Kurzschlussstrom IKS. In Figur 2-29 sind beide „extremen“
Betriebszustände eingetragen. Schaltet man alle inneren Quellen ab („Quellen werden zu Null
gemacht“), so wird das Netzwerk passiv, d.h. seine Kennlinie verläuft nun durch den Nullpunkt.
Ia=0
Ua
ULL
Leerlauf
ULL
IKS
Ua=0
Qu
elle
na
bg
es
cha
lte
t
Kurzschluss
Ia
IKS
Figur 2-29: Leerlaufspannung, Kurzschlussstrom („extreme“ Betriebszustände) und abgeschaltete Quellen
34
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
35
Abschalten einer Quelle heisst, sie durch ihren Innenwiderstand ersetzen. Bei der idealen Spannungsquelle ist der Innenwiderstand Null (Uq = 0). Für die ideale Stromquelle ist der Innenwiderstand Unendlich (Iq = 0). Figur 2-30 zeigt das „Abschalten“ von Quellen.
Die Ua-Ia-Kennlinie des passiven Netzwerkes durch den Nullpunkt entspricht der Kennlinie
eines ohmschen Widerstandes (Figur 2-29). Dieser ohmsche Widerstand ist der Ersatzwiderstand,
wenn bei abgeschalteten Quellen bei den Klemmen 1-1´ in das Netzwerk hineingemessen wird
(„hineingeschaut wird“). Dieser „gesehene“ oder gemessene Widerstand wird dann gerade zum Widerstand Re der Ersatzschaltung nach Thevenin oder Norton (Figur 2-31).
R=0
R = Rqe
Uq = 0
1
Rqe
1
R=∞
1'
Quellen
abgeschaltet
1
1'
Rqe
Iq = 0
1'
Figur 2-30: Abschalten von Quellen,
d.h. Ersatz der Quellen mit Innenwiderstand
Figur 2-31: Ersatzwiderstand bei abgeschalteten Quellen
Beim Abschalten einer Quelle wird sie nicht einfach weggelassen, sondern durch ihren Innenwiderstand ersetzt. Figur 2-30 in Worten ausgedrückt:
Beim Abschalten einer Quelle wird
- die ideale Spannungsquelle durch einen Kurzschluss ersetzt
- die ideale Stromquelle durch einen Unterbruch ersetzt.
Damit stehen nun drei „Experimente“ zur Verfügung, um die zwei Grössen (Uqe und Rqe oder Iqe und
Rqe) der Ersatzschaltung(en) zu bestimmen. Figur 2-32 zeigt die Methoden in einer Übersicht.
35
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
Leerlauf
Kurzschluss
1
36
Quellen abgeschaltet
1
U = Uqe
1
I = Iqe
1'
1'
Uqe
1'
Iqe
Rqe
R = Rqe
Rqe
1
1
oder
Uqe
Iqe
1'
Rqe
1'
Figur 2-32: Bestimmen der Ersatzschaltung(en) eines linearen Netzwerkes
Von obigen drei „Experimenten“ genügen zwei um die Ersatzschaltungen zu bestimmen. Die drei
Grössen Uqe, Iqe und Rqe sind voneinander abhängig (zur Beschreibung einer Geraden genügen zwei
Grössen). Aus Figur 2-29 ist leicht ersichtlich:
U qe = I qe ⋅ Rqe
(2.21)
Meistens ist die Bestimmung des Ersatzwiderstandes die einfachste der drei Untersuchungen, so
dass, je nach Struktur des Netzwerkes, zusätzlich noch die Leerlaufspannung oder der Kurzschlussstrom zu bestimmen ist.
Die beiden Ersatzschaltungen nach Thevenin und Norton sind vollständig gleichwertig, d.h.
die Wahl der Ersatzschaltung ist frei und mit (2.21) kann eine Thevenin-Ersatzschaltung in eine
Norton-Ersatzschaltung umgewandelt werden und umgekehrt.
Belastet man eine Quelle (Ersatzschaltung eines linearen Netzwerkes) mit einem (variablen) Lastwiderstand, so werden folgende Bezeichnungen eingeführt:
Rqe
Ia
1
Uqe
Ua
RL
Uqe:
Rqe:
RL:
Ua:
Ia:
Leerlaufspannung
Innenwiderstand (Ersatzwiderstand)
Lastwiderstand
Klemmenspannung
Klemmenstrom
1'
Figur 2-33: Belastete Quelle und Begriffe
36
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
37
Fasst man Ia als unabhängige und Ua als abhängige Variable auf, so bezeichnet man die Funktion Ua
= f(Ia) und ihre graphische Darstellung als Quellenkennlinie (QKL). Für die QKL ergibt sich (Figur
2-33):
U a = U qe − I a ⋅ Rqe
(2.22)
Die graphische Darstellung von (2.22) ist eine Gerade, die Schnittpunkte mit den Koordinatenachsen erhält man mit Ia = 0 (Leerlauf) und Ua = 0 (Kurzschluss). Figur 2-34 zeigt diese QKL mit den
„extremen Betriebszuständen“ Leerlauf und Kurzschluss.
Ua
ULL= Uqe
I KS =
∆ Ua
U qe
Rqe
Rqe = −
∆ Ia
∆U a
∆I a
(Zählpfeile in Figur 2-33 beachten!)
Ia
0
0
IKS
Figur 2-34: Quellenkennlinie QKL mit Leerlaufpunkt und Kurzschlusspunkt
Führt man für Quelle und Lastwiderstand je eine Kennlinie ein wie in Figur 2-35, so werden beim
Zusammenschalten von Quelle und Lastwiderstand die beiden Kennlinien in ein gemeinsames
Koordinatensystem gezeichnet (Strom Ia durch Quelle und Last ist identisch). Den Schnittpunkt der
beiden Kennlinien bezeichnet man als Arbeitspunkt (AP). Dieser Arbeitspunkt stellt sich dort ein,
wo Ua1 = Ua2 wird (Figur 2-36).
Ia
Ia
Ua1
Ua2
Ua2
Ua1
Ia
Ia
Man beachte, dass in Figur 2-35 die
Quelle im EZS und der Lastwiderstand
im VZS bepfeilt sind. Die Quellenkennlinie weist daher eine negative
Steigung auf, obwohl ihr Innenwiderstand positiv ist.
Figur 2-35: Separate Kennlinien für Quelle und Lastwiderstand (Lastgerade)
37
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
38
Ua1, Ua2
Ua2 = f(Ia)
Ua1 = Ua2
Uqe
U a1 = U qe − Rqe ⋅ I a
Lastgerade
U a2 = RL ⋅ I a
AP
UAP
Quellenkennlinie
Ua1 = g(Ia)
Ia
0
0
Figur 2-36: Quellenkennlinie mit
Lastgeraden und Arbeitspunkt
IAP
Gleichsetzen von Ua1 und Ua2 liefert Strom (IAP) und Spannung (UAP) im Arbeitspunkt:
I AP =
U qe
U AP =
Rqe + RL
U qe ⋅ RL
(2.23)
Rqe + RL
Beide Formeln können auch direkt in der Figur 2-33 „abgelesen werden“. Das Schneiden der Kennlinien, um den Arbeitspunkt zu bestimmen, macht besonders bei nichtlinearen Kennlinien Sinn
(häufig die einzige Lösungsmöglichkeit). Im Fall von linearen Kennlinien trägt die Graphik zur
Veranschaulichung bei.
Um sich etwas an die Darstellung mit der Quellenkennlinie zu gewöhnen, werden jetzt
einige Beispiele von idealen und realen Quellen betrachtet. Figur 2-37 zeigt den Vergleich von
idealer Spannungs- und Stromquelle.
Uq
Iq
U-Quelle
I-Quelle
Ua
Ua
Uq
Ia
Iq
Ia
Beachte:
Diese idealen Quellen können nicht
ineinander umgewandelt werden. D.h.
eine ideale U-Quelle muss immer mit
der Thevenin-Ersatzschaltung
dargestellt werden. Eine ideale I-Quelle benötigt die Norton-Ersatzschaltung.
Figur 2-37: Ideale Spannungsquelle (U-Quelle) und ideale Stromquelle (I-Quelle) mit Kennlinien
Figur 2-38 zeigt eine Quelle mit konstanter Leerlaufspannung und variablem Innenwiderstand. Eine
Quelle mit konstantem Kurzschlussstrom und variablem Innenwiderstand ist in Figur 2-39 dargestellt.
38
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
Ua
39
Ua
Uq
Iq
Ia
Figur 2-38: Quelle mit Uq = konstant und Rq = variabel
Ia
Figur 2-39: Quelle mit Iq = konstant und Rq = variabel
Welche Darstellungsart der Quelle für obige Figuren ist die geeignete (Thevenin oder Norton)? Wie
würden die Kennlinien aussehen für
a) Uq = variabel, Rq = konstant
b) Iq = variabel, Rq = konstant?
{Aufg2-39 ... Aufg2-44}
2.2.8 Zusammenschalten von Quellen
Die Thevenin-Ersatzschaltung einer Quelle wird von nun an einfach als „Thevenin-Quelle“ bezeichnet (Kurzform), ebenso heisst nun die Norton-Ersatzschaltung einer Quelle „Norton-Quelle“.
Werden reale Quellen (mit endlichen Innenwiderständen) zusammengeschaltet, so bestimmt
man mit den bekannten Methoden das Ersatznetzwerk (Thevenin oder Norton). Als Beispiel sei hier
die Parallelschaltung von zwei Thevenin-Quellen betrachtet.
R1
1
U1
1'
U2
R2
Abschalten der beiden U-Quellen führt sofort zu Rqe = R1||R2
und Kurzschluss bei 1-1´ liefert für den Kurzschlussstrom
Iqe = U1/R1 + U2/R2.
Mit Uqe = Rqe⋅Iqe erhält man schliesslich die Leerlaufspannung:
U qe =
U 1 ⋅ R2 + U 2 ⋅ R1
R1 + R2
(bitte verifizieren!)
Figur 2-40: Parallelschaltung von zwei Thevenin-Quellen
Die vorgängige Umwandlung der beiden Thevenin-Quellen in Norton-Quellen und anschliessendes
Parallelschalten der Norton-Quellen führt auch zum Resultat. Die Fälle „Norton-Quellen parallel“,
„Norton-Quellen in Serie“ und „Thevenin-Quellen in Serie“ sind analog zu obigem Beispiel zu behandeln.
Werden ideale Quellen parallel oder in Serie geschaltet, so sind folgende sechs Fälle zu unterscheiden:
U-Quelle || U-Quelle:
Widerspruch (i.A.) Þ nicht erlaubt
U-Quelle in Serie zu U-Quelle:
Addition der Spannungen
I-Quelle in Serie zu I-Quelle:
Widerspruch (i.A.) Þ nicht erlaubt
I-Quelle || I-Quelle:
Addition der Ströme
I-Quelle || U-Quelle:
U-Quelle
I-Quelle in Serie zu U-Quelle:
I-Quelle
39
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
40
2.2.9 Verfügbare Quellenleistung und Leistungsanpassung
Eine Quelle wird mit einem variablen Lastwiderstand RL belastet (Figur 2-41). Nun wird die an die
Last abgegebene Leistung PL berechnet.
Rq
1
mit I =
I
Uq
Rq + RL
und PL = I 2 ⋅ RL erhält
man für die Leistung PL in der Last:
Uq
PL
2
RL
PL =
U q ⋅ RL
dR + R i
q
2
b g
= f RL
L
1'
Figur 2-41: Reale Quelle (Thevenin-Quelle) und Leistung im Lastwiderstand
Für RL = 0 (Kurzschluss) und RL = ∞ (Leerlauf) wird PL = 0. Dazwischen weist PL = f(RL) ein Maximum auf. Mit Nullsetzen der Ableitung von f(RL) erhält man den Lastwiderstand für die
maximale Leistung:
df ( RL )
=0 Þ
dRL
RL = Rq
(2.24)
Setzt man (2.24) in die Formel für die Leistung ein, so ergibt sich für die maximale Leistung in der
Last PLMAX:
2
Uq
PLMAX =
4 ⋅ Rq
Diese Leistung stellt das Maximum dar, welches die Quelle an Leistung abgeben kann. Man bezeichnet sie als verfügbare Leistung (available power) und führt dafür ein neues Formelzeichen
PAV ein:
PAV =
Uq
2
4 ⋅ Rq
(2.25)
Den Betriebszustand mit RL = Rq bezeichnet man als Leistungsanpassung. Bei Leistungsanpassung
gibt also eine Quelle ihre verfügbare Leistung ( = maximale Leistung ) an die Last ab. Die Stromund Spannungsverhältnisse für diesen wichtigen Betriebszustand sind in der folgenden Figur eingetragen.
40
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
Rq
41
1
1
Uq
Uq
Iq
PAV
Iq
R L = Rq
2
2
Rq
2
q
PAV
Rq
RL = R q
1'
1'
FGU IJ
H 2K
=
PAV
=
Uq
2
PAV
4 ⋅ Rq
F I IJ
=G
H 2K
q
2
2
⋅ Rq =
I q ⋅ Rq
4
Figur 2-42: Verfügbare Leistung und Leistungsanpassung (mit Thevenin- und Norton-Quelle)
Man beachte, dass PAV nicht vom Lastwiderstand abhängig ist und jeder (nichtidealen) Quelle zugeordnet werden kann. Figur 2-43 zeigt das Verhältnis PL/PAV in Funktion von RL/ Rq.
PL/PAV
PL
=
PAV
Leistungsanpassung
1
0.8
4
R
R
2+ L + q
Rq RL
RL
lässt sich obige
Rq
0.6
mit x =
0.4
Formel schreiben:
0.2
PL
4
=
=
PAV 2 + x + 1
x
0
0
2
1
4
6
8
RL/Rq
FG
H
4
x+
1
x
IJ
K
2
Figur 2-43: PL/PAV in Funktion von RL /Rq und Betriebszustand Leistungsanpassung
Für ideale Quellen (mit Rq = 0 oder Rq = ∞) ist die verfügbare Leistung nicht definiert (oder unendlich).
{Aufg2-46 ... Aufg2-49}
41
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
42
2.3 Analyse von Gleichstromkreisen
2.3.1 Anwendung von Knoten- und Maschensatz
Mit der konsequenten Anwendung von Knotensatz und Maschensatz können die meisten Netzwerkprobleme gelöst werden. Meistens erhält man einen Satz von Gleichungen, die dann mit geeigneten
Methoden aufzulösen sind. Das Verfahren wird an einem einfachen, und dann an einem aufwendigeren Beispiel demonstriert. Figur 2-44 zeigt ein einfaches Netzwerk mit Quellen und Einströmungen:
Gegeben sind:
IA, IB , U1 und U2
Gesucht sind:
I1 und I2
U1
IA
a
Einführen von I3 und IC führt zu:
1 ) IA + IB – IC = 0
(Superknoten)
2) IA = I1 + I2
(Knoten a)
3) IC = I2 + I3
(Knoten c)
4) I3 = I1 + IB
(Knoten b)
R2
R1
IB
U2
I2
R3
I1
I3
c
b
IC
5) –I1R1 – U1 + I2R2 + U2 – I3R3 = 0
(Masche b-a-c-b)
Figur 2-44: Einfaches Netzwerk mit Knotensatz und Maschensatz
Auflösen von 2) nach I2 führt zu I2 = IA – I1
Auflösen von 4) nach I3 führt zu I3 = I1 + IB
Nun setzt man I2 und I3 in Gleichung 5) ein und löst nach I1 auf:
I1 =
−U 1 + U 2 + I A R2 − I B R3
R1 + R2 + R3
und für I2:
I2 =
U 1 − U 2 + I A ( R1 + R3 ) + I B R3
R1 + R2 + R3
Von den fünf Gleichungen werden also nur drei zur Berechnung von I1 und I2 verwendet. Die fünf
Gleichungen sind nicht unabhängig voneinander und das Auflösen braucht systematisches Vorgehen
und etwas Geschick. Für „kleine Netzwerke“ ist das Verfahren gut geeignet, für „mittlere“ und
„grosse Netzwerke“ hingegen wird das Aufstellen und Lösen der Gleichungen sehr schnell unübersichtlich. Als zweites Beispiel sei Figur 2-45 betrachtet:
R1
U1
b
R2
R5
I5
R3
c
Gegeben:
U1 und alle Widerstände
Gesucht:
Allgemeiner Ausdruck für I5
R4
Figur 2-45: Berechnung des Querstromes bei der Brückenschaltung mit Knotensatz und Maschensatz
Um Knoten- und Maschensätze aufzustellen, führt man im Netzwerk zusätzliche Ströme ein. Es
werden die zwei Ströme I1 und I3 verwendet; die restlichen Ströme ergeben sich aus den Knotensätzen an den Knoten b und c (siehe Figur 2-46).
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
I1
R1
U1
1
b
R2
I3
2
R5
I5
3
I1− I5
I3+ I5
R3
c
R4
43
Für die drei Maschen erhält man drei Gleichungen:
−U 1 + R1 I1 + R2 ( I1 − I 5 )
=0
− R1 I1 + R3 I 3 − R5 I 5
=0
R5 I 5 + R4 ( I 3 + I 5 ) − R2 ( I1 − I 5 ) = 0
1)
2)
3)
Figur 2-46: Brückenschaltung mit zusätzlichen Strömen und Maschenbezeichnungen
Für die drei unbekannten Grössen (I1, I3 und I5) hat man drei unabhängige Gleichungen; das Auflösen nach I5 ist „nur noch eine Sache der Mathematik“:
aus 2) erhält man für I3:
R
R
I 3 = 5 I 5 + 1 I1
4)
R3
R3
aus 3) erhält man für I1:
R
R
R
5)
I1 = 5 I 5 + 4 I 3 + 4 I 5 + I 5
R2
R2
R2
jetzt setzt man 4) in 5) ein und löst nach I1 auf:
R2 R3
R R
RR
6)
I1 = I 5
1+ 5 + 4 + 4 5
R2 R3 − R1 R4
R2 R2 R2 R3
LM
N
OP
Q
schliesslich setzt man 6) in 1) ein und löst nach I5 auf:
I5 =
U1 R2 R3 − R1 R4
R1 R3 R5 + R1 R4 R5 + R2 R3 R5 + R2 R4 R5 + R1 R2 R3 + R1 R2 R4 + R1 R3 R4 + R2 R3 R4
Aufg2-50: Vollziehen Sie obige Rechnung nach und kontrollieren Sie das Resultat für I5.
Das Aufstellen der notwendigen Gleichungen (Ohmsches Gesetz, Knoten- und Maschensätze) setzt
elektrotechnische Kenntnisse voraus; das Lösen der Gleichungen hingegen ist Sache der Mathematik und hat nichts mehr mit Elektrotechnik zu tun! Zur Manipulation und Lösung solcher (linearer)
Gleichungssysteme eignen sich Computer-Algebra-Programme wie Maple oder Mathematica besonders gut. Für den Elektroingenieur ist es unbefriedigend, dass das obige einfache Netzwerk
(Figur 2-46) schon so einen Rechenaufwand erfordert.
Die „Elektrotechnik“ hat zusätzliche Methoden, die solche Beispiele eleganter und mit wesentlich weniger Rechenaufwand lösen. (Die „Wirksamkeit“ einiger Methoden (Performance) wird
zum Vergleich auch am obigen Beispiel demonstriert.)
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
44
2.3.2 Netzumwandlung
Meistens interessiert in einem Netzwerk eine bestimmte Spannung oder ein bestimmter Strom; selten sind alle Spannungen und alle Ströme gesucht. Deshalb können häufig folgende Schritte zur
Vereinfachung des Netzwerkes durchgeführt werden:
-
„Überflüssige Widerstände“ weglassen oder kurzschliessen
Widerstände bei Serie- oder Parallelschaltungen zusammenfassen
Punkte mit gleichem Potential können getrennt oder verbunden werden
Zusätzliche Einströmungen an Knoten anbringen, ohne Verletzung des Knotensatzes
Teile des Netzwerkes, oder ganzes Netzwerk durch Ersatzquellen ersetzen
Stern-Dreieck-Umwandlung (Y→∆)
Weitere Äquivalenztransformationen (LC-Eintore)
Dreieck-Stern-Umwandlung (∆
∆→Y) und Stern-Dreieck-Umwandlung (Y→
→ ∆)
Hier handelt es sich um eine äquivalente Umwandlung eines 3-Pol-Netzwerkes (3 Anschlussklemmen). Figur 2-47 zeigt die beiden äquivalenten Widerstandsnetzwerke.
2
2
RB
R2
R1
RA
1
3
R3
RC
1
3
RA =
R1 ⋅ R3
R1 + R2 + R3
RB =
R1 ⋅ R2
R1 + R2 + R3
RC =
R2 ⋅ R3
R1 + R2 + R3
(2.26)
Figur 2-47: Dreieck-Stern-Umwandlung mit Umrechnungsformeln
Auch die Rückumwandlung von der Sternschaltung in die Dreieckschaltung ist möglich. Figur 2-48
zeigt dies mit den zugehörigen Formeln. Hier werden Leitwerte statt Widerstände verwendet, damit
erscheinen die Formeln (2.27) „symmetrisch“ zu (2.26) und lassen sich einfacher im Gedächtnis behalten!
2
2
G2
G1
1
GB
GA
G3
3
1
GC
3
GA =
G1 ⋅ G2
G1 + G2 + G3
GB =
G2 ⋅ G3
G1 + G2 + G3
GC =
G1 ⋅ G3
G1 + G2 + G3
(2.27)
Figur 2-48: Stern-Dreieck-Umwandlung mit Umrechnungsformeln
Die Äquivalenz der beiden Netzwerke gilt nur „nach aussen“. So ist z.B. die Frage nach dem Strom
durch G1 (Figur 2-48) nur in der Sternschaltung (links) möglich, in der Dreieckschaltung (rechts)
existiert G1 überhaupt nicht!
{Aufg2-51 ... Aufg2-54}
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
45
U-Quellen verdoppeln (Punkte mit gleichem Potential trennen)
Am Beispiel der Brückenschaltung wird das Verfahren erläutert (Figur 2-49). In der Anordnung
links weisen die Punkte a und b das gleiche Potential gegenüber dem Punkt e auf. Werden nun zwei
identische Spannungsquellen an diese Punkte angeschlossen (Bild rechts), so kann man die Verbindung zwischen a und b weglassen. Die fünf Widerstände im Netzwerk haben von dieser Umwandlung nichts bemerkt (keine Änderung der Ströme und Spannungen).
a
b
U1
a
b
U1
U1
e
e
Figur 2-49: Brückenschaltung mit Verdopplung der U-Quellen
Was hat man durch diese Umwandlung an Vereinfachung gewonnen? Jede Spannungsquelle hat
nun einen Seriewiderstand und kann in eine Norton-Quelle verwandelt werden; damit lässt sich das
Netzwerk (je nach Fragestellung) weiter vereinfachen.
I-Quellen verdoppeln (Zusätzliche Einströmungen einführen)
Auch diese Methode wird am Beispiel der Brückenschaltung gezeigt. In Figur 2-50 wird eine
Brücke mit einer idealen Stromquelle gespeist (links). Nun wird die Stromquelle „verdoppelt“ und
dem Knoten b wird der Strom I1 zugeführt und wieder weggeführt. Auch hier bemerken die fünf
Widerstände nichts von der Umwandlung; die Einströmungsverhältnisse an den Knoten a, b und c
sind unverändert geblieben.
a
a
I1
I1
b
b
I1
c
Figur 2-50: Brückenschaltung mit Verdopplung der I-Quellen
c
Dank der Umwandlung besitzt jetzt jede Stromquelle einen Parallelwiderstand und könnte in eine
Thevenin-Quelle verwandelt werden.
Ersatzquellen einführen
Hier handelt es sich um die wirksamste Methode, sie soll am (rechenintensiven) Beispiel der Berechnung des Querstromes I5 in der Brückenschaltung demonstriert werden (siehe auch Figur 2-46).
Zur Erinnerung: Der Strom I5 durch den Widerstand R5 ist gesucht; alle anderen Spannungen und
Ströme sind nicht gefragt. Deshalb wird das Netzwerk soweit wie möglich vereinfacht; nur die
Verhältnisse bei R5 dürfen sich nicht ändern. Der Widerstand R5 wird mit einer Umrandung versehen. Das Netzwerk ausserhalb dieser Umrandung wird jetzt in mehreren Schritten vereinfacht. Im
ersten Schritt verdoppelt man die Spannungsquelle.
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
R1
R3
R5
a
U1
R1
b
I5
R2
R4
R3
R5
a
U1
46
b
U1
I5
R2
R4
Figur 2-51: Berechnung des Querstromes bei der Brückenschaltung: 1. Schritt: Verdopplung der U-Quellen
Einführen von zwei zusätzlichen Klemmen und Umzeichnen der Quellen führt auf Figur 2-52.
R1
a
R5
R3
b
Rqe1
a
R5
b
I5
U1
R2
I5
R4
c
Rqe2
U1
Uqe1
Uqe2
c
c
c
Ersatzquellen bestimmen
Figur 2-52: Berechnung des Querstromes bei der Brückenschaltung: 2. Schritt: Einführen neuer Klemmen, Umzeichnen
und Ersatzquellen bestimmen
„Blickt“ man von Klemmen a-c nach links, so kann das linke Netzwerk mit einer Thevenin-Quelle
ersetzt werden (bezüglich der Klemmen a-c). Ebenso kann das Netzwerk rechts der Klemmen b-c
durch eine Thevenin-Quelle ersetzt werden. Die Ersatzgrössen Uqe1, Rqe1, Uqe2 und Rqe2 bestimmt
man nach bekannter Art und erhält:
R2
R4
Rqe1 = R1 R2 ,
Rqe2 = R3 R4 ,
U qe1 = U 1 ⋅
,
U qe2 = U 1 ⋅
R1 + R2
R3 + R4
damit wird jetzt der Strom I5:
I5 =
U qe1 − U qe2
Rqe1 + R5 + Rqe2
U1 ⋅
=
LM R
NR + R
2
1
2
−
R4
R3 + R4
R1 R2 + R5 + R3 R4
OP
Q
Hat man obiges Vorgehen im Gedächtnis (konzeptionell), so kann die Formel für I5 direkt hingeschrieben werden (bitte selber probieren!).
Aufg2-55: Man zeige, dass obiger Ausdruck für I5 mit der Formel auf Seite 43 übereinstimmt.
{Aufg2-56 ... Aufg2-57}
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
47
2.3.3 Überlagerungssatz (Superposition)
In linearen Netzwerken dürfen alle (verschiedenen) Ursachen „überlagert werden“. Überlagerung
(oder Superposition) bedeutet: Jede Ursache (Quelle) wirkt einzeln im Netzwerk. Die Gesamtwirkung erhält man durch Addition der einzelnen Wirkungen (die Reihenfolge der Wirkungen spielt
keine Rolle). Also: Das „Miteinander der Quellen“ wird in ein „Nacheinander der Quellen“
zerlegt. Die Methode macht nur Sinn, wenn mehrere Quellen beteiligt sind. Das Beispiel aus Figur
2-44 (Seite 42) wird jetzt mit dem Überlagerungssatz gelöst. Figur 2-53 zeigt nochmals das Netzwerk und die Aufgabenstellung.
IA
a
U1
R2
R1
IB
U2
I2
R3
I1
Gegeben sind:
Gesucht sind:
I3
c
b
IA, IB , U1 und U2
I1 und I2
IC
Figur 2-53: Lösung des Beispiels aus Figur 2-44 mit Superposition (4 Quellen)
Im Netzwerk wirken die 4 Quellen IA, IB, U1 und U2. Jede dieser 4 Quellen lässt man nun einzeln
wirken, die anderen Quellen (Ursachen sind abgeschaltet). Figuren 2-54 bis 2-57 zeigen für jede
einzelne Quelle das entsprechende Netzwerk. Die resultierenden Ströme sind auch in die Figuren
eingetragen. Dabei gelten folgende Konventionen für die Indizes:
1. Index: „Ort, wo der Strom (die Spannung) gemessen wird“
2. Index: „Ort, wo die Quelle wirkt“
Uxy bedeutet also: Spannung Ux verursacht durch die Quelle y
1. Quelle
IA
a
R2
R1
I1
2. Quelle
I2
IB
R3
b
R2
R1 + R2 + R3
R1 + R3
I 21 = I A ⋅
R1 + R2 + R3
a
R2
R1
I1
I2
R3
b
c
− R3
R1 + R2 + R3
R3
I 22 = I B ⋅
R1 + R2 + R3
I11 = I A ⋅
I12 = I B ⋅
Figur 2-54: IA wirkt (1. Quelle)
Figur 2-55: IB wirkt (2. Quelle)
c
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
U1
a
a
R2 3. Quelle
R1
R2
R1
I2
R3
I1
48
I2
c
−1
R1 + R2 + R3
1
I 23 = U 1 ⋅
R1 + R2 + R3
c
b
I14 = U 2 ⋅
I13 = U 1 ⋅
I 24 = U 2 ⋅
Figur 2-56: U1 wirkt (3. Quelle)
U2
R3
I1
b
4. Quelle
1
R1 + R2 + R3
−1
R1 + R2 + R3
Figur 2-57: U2 wirkt (4. Quelle)
Durch die Addition der Einzelwirkungen erhält man jetzt die Gesamtwirkung:
I1 = I11 + I12 + I13 + I14 =
I A R2 − I B R3 − U 1 + U 2
R1 + R2 + R3
I 2 = I 21 + I 22 + I 23 + I 24 =
I A ( R1 + R3 ) + I B R3 + U 1 − U 2
R1 + R2 + R3
Statt Doppelindizes wird oft die Schreibweise I1 = I1´ + I1´´ + I1´´´ + I1´´´´ verwendet. Die „Hochstriche“ sollen angeben, welche Quelle beim entsprechenden Strom gewirkt hat.
Als zweites Beispiel zum Überlagerungsverfahren wird nochmals der Querstrom bei der
Brückenschaltung berechnet (dritte Version). Als erster Schritt wird wiederum die Quelle U1 verdoppelt (siehe Figur 2-51, Seite 46). Lässt man zuerst die linke Quelle, und dann die rechte Quelle
wirken, so ergeben sich die unten skizzierten Netzwerke.
R1
R3
R5
U1
R5
I51
R2
R4
U1
I52
R3
R2
R1 + R2
I 51 =
R1 R2 + R5 + R3 R4
U1 ⋅
Figur 2-58: Linke Quelle wirkt (siehe Figur 2-51)
R1
R2
R4
R4
R3 + R4
I 52 =
R1 R2 + R5 + R3 R4
−U 1 ⋅
Figur 2-59: Rechte Quelle wirkt (siehe Figur 2-51)
Addition der beiden Teilströme I51 und I52 ergibt wieder das bekannte Resultat für den Querstrom.
(bitte obige Rechnung nachvollziehen und Resultat kontrollieren!)
{Aufg2-58 ... Aufg2-61}
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
49
2.3.4 Knotenpotentialverfahren
Grössere und grosse Netzwerke werden mit speziellen Verfahren berechnet, die dabei auftretenden
(linearen) Gleichungssysteme löst man mit Hilfe des Taschenrechners oder Computers. Im Rahmen
dieses Unterrichts werden zwei solche Verfahren kurz an Beispielen eingeführt. Für eine ausführliche Behandlung der Methoden wird auf die Literatur [2],[3],[4] verwiesen (siehe auch Vorlesung
Elektronik und Projekte und Tools).
Die erste Methode ist das sog. Knotenpotentialverfahren. Bei diesem Verfahren sind die Einströmungen gegeben und die Potentiale der Knoten sind die unbekannten Grössen (Name der Methode). Figur 2-60 zeigt ein Netzwerk mit vier Knoten. Die Knoten werden numeriert und jeder
Knoten erhält sein Knotenpotential. Ebenso erhält jeder Knoten eine Einströmung. Für die Netzwerkelemente trägt man (vorzugsweise) Leitwerte ein.
I1
G1
V1
V2
I2
1
I1, I2, I3, I4:
2
G5
G4
V1, V2, V3, V4: Potentiale am jeweiligen
Knoten (unbekannte Grössen)
G2
G6
G3
I4 4
Einströmungen am jeweiligen
Knoten (gegebene Grössen)
3 I
3
I1 + I2 + I3 + I4 = 0 (Superknoten)
V3
V4
Figur 2-60: Netzwerk mit Einströmungen
und Knotenpotentialen
Für jeden Knoten wird jetzt der Knotensatz formuliert, d.h. der zufliessende Strom ist gleich der
Summe der wegfliessenden Ströme. Die Ströme in den Zweigen werden durch die Potentialdifferenzen (Spannungen) und die Leitwerte ausgedrückt (Ohmsches Gesetz). So gilt für obige vier Knoten:
Knoten 1:
Knoten 2:
Knoten 3:
Knoten 4:
I1 = G1(V1 - V2) + G5(V1 - V3) + G4(V1 - V4)
I2 = G1(V2 - V1) + G6(V2 - V4) + G2(V2 - V3)
I3 = G2(V3 - V2) + G5(V3 - V1) + G3(V3 - V4)
I4 = G4(V4 - V1) + G6(V4 - V2) + G3(V4 - V3)
Ordnet man das Gleichungssystem um und sortiert nach den Knotenpotentialen so ergibt sich:
1:
2:
3:
4:
V1(G1+G4+G5)
V1(–G1)
V1(–G5)
V1(–G4)
+V2(–G1)
+V2(G1+G2+G6)
+V2(–G2)
+V2(–G6)
+V3(–G5)
+V3(–G2)
+V3(G2+G3+G5)
+V3(–G3)
+V4(–G4)
+V4(–G6)
+V4(–G3)
+V4(G3+G4+G6)
= I1
= I2
= I3
= I4
Aufg2-62: Vollziehen Sie obige Herleitung nach und kontrollieren Sie auch, dass die Addition der
vier Gleichungen Null ergibt.
Obige vier Gleichungen stellen ein (unbestimmtes) Gleichungssystem für die unbekannten Grössen
V1 bis V4 dar. Um die Struktur besser untersuchen zu können, wird die linke Seite des Gleichungssystems nochmals geschrieben (tabellenartig):
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
V1
V2
V3
V4
G1+G4+G5
–G1
–G5
–G4
–G1
G1+G2+G6
–G2
–G6
–G5
–G2
G2+G3+G5
–G3
–G4
–G6
–G3
G3+G4+G6
50
I1
I2
I3
I4
Diese Anordnung der Koeffizienten für die unbekannten Grössen bezeichnet man als Matrix (oder
Koeffizientenmatrix). In der sog. „Matrix-Darstellung“ (siehe Lineare Algebra) wird das Gleichungssystem wie folgt dargestellt:
LMG + G + G
MM −−GG
MN −G
1
1
− G1
G1 + G2 + G6
− G5
− G2
5
− G2
G2 + G3 + G5
4
− G6
− G3
4
5
OP
PP
−G
P
G +G +G Q
− G4
− G6
3
3
4
6
⋅
OP
P
VP
P
VQ
V1
V2
3
4
=
OP
P
I P
P
I Q
I1
I2
3
4
oder in Kurzschreibweise:
Y ⋅V = I
(2.28)
mit:
Y :
V :
I :
Unbestimmte Admittanzmatrix UAM
Spaltenvektor mit Potentialen
Spaltenvektor mit Einströmungen
Die unbestimmte Admittanzmatrix UAM weist einige besondere Eigenschaften auf:
- Die Summe aller Elemente einer Zeile ergibt Null
- Die Summe aller Elemente einer Spalte ergibt Null
- Symmetrie (i-te Zeile und i-te Spalte sind identisch)
- Alle Elemente auf der Hauptdiagonalen sind positiv, restliche Elemente alle negativ
Vergleicht man das Netzwerk (Figur 2-60) und die UAM, so stellt man folgende Gesetzmässigkeiten fest:
- Auf der Hauptdiagonalen (i,i) steht die Summe aller am Knoten i angeschlossener Leitwerte
- Das Element (j,k) enthält den negativen Leitwert, der die Knoten j und k verbindet
Definition:
- Die Summe aller am Knoten i angeschlossener Leitwerte heisst Eigenleitwert des Knoten i
- Die Summe aller Leitwerte, die Knoten j und k verbinden heisst Koppelleitwert zwischen
Knoten j und Knoten k
Diese zwei „Regeln“ genügen schon, um bei einem gegebenem Netzwerk die unbestimmte Admittanzmatrix UAM niederzuschreiben. Fehlt eine Verbindung zwischen Knoten j und k, so trägt man
eine Null an der entsprechenden Stelle (j,k) in der UAM ein.
Das lineare Gleichungssystem (2.28) weist ∞-viele Lösungen auf (Potential ist unbestimmt)
und kann so nicht mit dem Taschenrechner gelöst werden. Auch aus „elektrotechnischer Sicht“
kann dieser Sachverhalt erklärt werden (siehe Figur 2-60): Ohne Festlegung eines Potentialnullpunktes gibt es ∞-viele Lösungen für die Potentiale, die sich zwar nur durch einen konstanten Wert
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
51
unterscheiden. Um die Lösungsmenge eindeutig zu machen, muss ein Potentialnullpunkt festgelegt
werden. Der Ort des Potentialnullpunktes ist frei und kann willkürlich gewählt werden. Sinnvollerweise wählt man einen Netzwerkknoten als Potentialnullpunkt. Durch die Wahl eines Knotens zum
Potentialnullpunkt wird sein Potential im Gleichungssystem Null. Dadurch lassen sich im Gleichungssystem eine Spalte und eine Zeile streichen. Figur 2-61 zeigt das Netzwerk aus Figur 2-60
mit eingezeichnetem Potentialnullpunkt.
I1
G1
V1
V2
1
I2
2
Knoten 3 wird als Bezugspunkt gewählt und damit gilt
V3 = 0. Damit kommt auch der Strom I3 im Gleichungssystem nicht mehr vor. Im Gleichungssystem
werden jetzt die dritte Zeile und die dritte Spalte gestrichen. Das Gleichungssystem reduziert sich damit
von einem „4x4-System“ (∞-viele Lösungen) auf ein
„3x3-System“ (1 Lösung).
G5
G4
G2
G6
G3
I4 4
V4
3 I
3
V3 = 0
V3
Figur 2-61: Netzwerk aus Figur 2-60 mit
Potentialnullpunkt bei Knoten 3
éG1 + G4 + G5
ê
− G1
ê
ê
− G5
ê
− G4
ë
− G1
− G5
− G4
G1 + G2 + G6
− G2
− G2
G2 + G3 + G5
− G6
− G3
V1 ù
ù
ú
− G6
Vú
ú ⋅ 2ú =
ú
− G3
V3 ú
ú
ú
G3 + G4 + G6 û
V4 û
I1 ù
I2 ú
ú
I3 ú
ú
I4 û
Schreibt man die Gleichungen nochmals, so erhält man:
LMG + G + G
MM −G
N −G
1
4
5
− G1
1
G1 + G2 + G6
4
− G6
OP
−G
P
G + G + G PQ
− G4
6
3
4
6
OP
V
P
V PQ
V1
⋅
2
4
OP
I
P
I PQ
I1
=
2
4
Dieses Gleichungssystem kann jetzt mit dem Taschenrechner oder Computer gelöst werden (numerisch). Aus den Potentialen können dann leicht alle interessierenden Spannungen und Ströme
berechnet werden.
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
52
Für das Knotenpotentialverfahren empfiehlt sich folgendes Vorgehen:
1. Netzwerk so umzeichnen/umwandeln, dass nur noch Einströmungen als Quellen
vorliegen
2. Knoten des Netzwerkes numerieren
3. Bezugspfeile für Einströmungen einheitlich definieren (z.B. in das Netzwerk hinein)
4. Aufstellen der UAM gemäss Regeln auf Seite 50: Eigenleitwerte der Knoten auf der
Hauptdiagonalen, Koppelleitwerte zwischen den Knoten negativ eintragen
5. Kontrolle der UAM (Symmetrie und Summe über Spalten/Zeilen)
6. Einströmungsvektor aufstellen (positive Zählrichtung, für Bezugspfeil ins Netzwerk
hinein)
7. Potentialnullpunkt wählen und entsprechende Zeile und Spalte streichen
8. Gleichungssystem numerisch lösen
9. Kontrolle!!
{Aufg2-63 ... Aufg2-66}
2.3.5 Maschenstromverfahren
Die zweite systematische Methode zur Lösung grösserer und grosser Netzwerke ist das sog. Maschenstromverfahren. Bei diesem Verfahren sind die Spannungen gegeben und die Maschenströme
sind die unbekannten Grössen (Name der Methode). Auch dieses Verfahren soll an einem Beispiel
demonstriert werden. Figur 2-62 zeigt ein Netzwerk mit drei (einfachen) Maschen. Die Maschen
werden numeriert und erhalten einen Umlaufssinn (vorzugsweise identisch für alle Maschen). Für
die Netzwerkelemente trägt man Widerstände ein.
R1
I4
I1
I5
I2
Im2
U1
Im1
R2
R3
Im3
U2
I3
R4
U1, U2:
Spannungen in den Maschen
(gegebene Grössen)
Im1, Im2, Im3:
Maschenströme
(unbekannte Grössen)
R5
Figur 2-62: Netzwerk mit 3 Maschenströmen
und Umlaufsinn für die Maschen
Für jede Masche wird jetzt der Maschensatz formuliert, d.h. die Umlaufspannung in jeder Masche
ist gleich Null. Die Teilspannungen werden durch die Maschenströme und die Widerstände ausgedrückt (Ohmsches Gesetz). So gilt für obige drei Maschen:
Masche1:
Masche2:
Masche3:
– U1 + Im1R2 + Im1R4 – Im2R2
=0
Im2R1 + Im2R3 + Im2R2 – Im3R3 – Im1R2
U2 + Im3R5 + Im3R3 – Im2R3
=0
=0
Ordnet man das Gleichungssystem um und sortiert nach den Maschenströmen so ergibt sich:
1:
2:
3:
Im1(R2+R4)
Im1(–R2)
0
+Im2(–R2)
+Im2(R1+R2+R3)
+Im2(–R3)
0
+Im3(–R3)
+Im3(R3+R5)
= U1
= 0
= –U2
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
53
Aufg2-67: Vollziehen Sie vorige Herleitung nach und kontrollieren Sie das Gleichungssystem.
Schreibt man dieses Gleichungssystem mit Hilfe der „Matrix-Darstellung“ (siehe auch Vorgehen
beim Knotenpotentialverfahren) so erhält man:
LMR + R
MM − R
N 0
2
− R2
4
2
R1 + R2 + R3
− R3
OP
−R
P
R + R PQ
0
3
3
I m1
⋅ I m2
5
I m3
OP
PP
Q
OP
0
P
−U PQ
U1
=
2
oder in Kurzschreibweise:
Z ⋅ Im = U
(2.29)
mit:
Z :
Kreisimpedanzmatrix
I m : Spaltenvektor mit Maschenströmen
U : Spaltenvektor mit Spannungsquellen
Die Kreisimpedanzmatrix Z weist einige besondere Eigenschaften auf:
- Symmetrie (i-te Zeile und i-te Spalte sind identisch)
- Alle Elemente auf der Hauptdiagonalen sind positiv, (restliche Elemente alle negativ?)
Vergleicht man das Netzwerk (Figur 2-62) und die Matrix Z , so stellt man folgende Gesetzmässigkeiten fest:
- Auf der Hauptdiagonalen (i,i) steht die Summe aller Widerstände in der Masche i
- Das Element (j,k) enthält den gemeinsamen Widerstand der Maschen j und k
Diese zwei „Regeln“ genügen schon, um bei einem gegebenen Netzwerk die Kreisimpedanzmatrix
Z niederzuschreiben. Das Vorzeichen des Koppelwiderstandes (gemeinsames Element zweier Maschen) in der Matrix hängt von den angenommenen Umlaufsrichtungen der beiden beteiligten Maschen ab!
Das lineare Gleichungssystem (2.29) kann direkt mit dem Taschenrechner oder Computer
gelöst werden. Die Lösungen sind die gesuchten Maschenströme Imk. Die Zweigströme lassen sich
leicht aus den Maschenströmen berechnen. Im Beispiel (siehe Figur 2-62) gilt I1 = Im2, I2 = Im1 – Im2,
I3 = Im2 – Im3, I4 = Im1 und I5 = –Im3.
Für das Maschenstromverfahren empfiehlt sich folgendes Vorgehen:
1. Netzwerk so umzeichnen/umwandeln, dass nur noch Spannungsquellen vorliegen
2. Maschenströme mit Umlaufsrichtung einführen
3. Aufstellen der Matrix Z gemäss obigen Regeln: Gesamtwiderstand der Masche auf der
Hauptdiagonalen eintragen, bei den Koppelwiderständen Vorzeichen beachten!
4. Vektor mit Spannungsquellen aufstellen (Vorzeichen!)
5. Gleichungssystem numerisch lösen
6. Kontrolle!!
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
54
2.3.6 Dualität (und Äquivalenz)
Von äquivalenten n-Toren (und n-Polen) spricht man, wenn sich zwei n-Tore bezüglich ihrer Klemmen (nach aussen) identisch verhalten. Dabei dürfen an den Klemmen (oder Klemmenpaaren) beliebige Experimente durchgeführt werden. Die folgenden Figuren zeigen Beispiele für zwei äquivalente 1-Tore, zwei äquivalente 2-Tore und zwei äquivalente 4-Pole.
20 Ω
10 Ω
1
1
20 Ω
10 V
5V
1'
1'
Figur 2-63: Beispiel für äquivalente 1-Tore
100 Ω
1
2
250 Ω
1
2
150 Ω
50 Ω
1'
75 Ω
30 Ω
1'
2'
2'
Figur 2-64: Beispiel für äquivalente 2-Tore
2
1
1
40
2
10
20
12
60
30
40
40
100
30
4
28
8
80
10
3
alle Widerstände in Ohm
4
3
Figur 2-65: Beispiel für äquivalente 4-Pole
Aufg2-70: Kontrollieren Sie die Gleichwertigkeiten der Schaltungen in den Figuren 2-63 bis 2-65.
Eine häufig verwendete und (später) nützliche „Verwandtschaft“ von Netzwerken ist die sog. Dualität. In der Elektrotechnik gibt es viele Begriffe und Grössen, die immer paarweise, d.h. zu zweit
(dual) auftreten. Kennzeichnend für diese paarweise vorhandenen Grössen ist, dass ein Vertauschen
dieser Grössen in den sie verknüpfenden Gleichungen formal die gleichen Sätze liefert.
Hier werden kurz die Definitionen und Begriffe eingeführt und die Erzeugung des dualen
Netzwerkes an einem Beispiel gezeigt. Für eine ausführliche Behandlung ist auf die Literatur verwiesen [2], [3].
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
55
Zwei Netzwerke heissen dual, wenn sich die Ströme im einen Netzwerk genau so verhalten
wie die Spannungen im anderen Netzwerk. (Die Spannungen im einen Netzwerk verhalten
sich dann genau so wie die Ströme im anderen Netzwerk)
Betrachtet man ein Originalnetzwerk und das zugehörige duale Netzwerk, so gelten folgende Entsprechungen (Beziehungen):
Originalnetzwerk
Spannung
Widerstand
Spule
U-Quelle
Serieschaltung
Leerlauf
Masche
duales Netzwerk
↔
↔
↔
↔
↔
↔
↔
Strom
Leitwert
Kondensator
I-Quelle
Parallelschaltung
Kurzschluss
Knoten
und umgekehrt!
An einem einfachen Beispiel wird gezeigt, wie man zu einem Originalnetzwerk das duale Netzwerk
erzeugt. Figur 2-66 zeigt das Originalnetzwerk mit einer Spannungsquelle und drei Widerständen.
Nun plaziert man innerhalb jeder Masche (im Originalnetzwerk) einen Knoten und ausserhalb des
Netzwerkes einen zusätzlichen Knoten. Die Knoten werden so mit Elementen verbunden, dass man
„durch“ das Originalelement das duale Element zeichnet.
5Ω
5S
10 Ω
10 V
10 S
20 Ω
Figur 2-66: Originalnetzwerk
20 S
10 A
Figur 2-67: „Erzeugen“ des dualen Netzwerkes
Jedes duale Element erhält den gleichen numerischen Wert wie das Originalelement, aber mit der
entsprechend dualen Einheit. Zeichnet man das Netzwerk in Figur 2-67 neu, so erhält man Figur 268 (zum Vergleich auch noch mit Originalnetzwerk).
5Ω
10 V
10 Ω
20 Ω
10 S
10 A
5S
20 S
Figur 2-68: Originalnetzwerk und duales Netzwerk
aet/nik
2 Grundbegriffe und Grundgesetze (Gleichstrom)
56
Aufg2-71: Man berechne für beide Netzwerke (Figur 2-68) alle Ströme und alle Spannungen. Diskutieren Sie die Netzwerkstrukturen in Figur 2-68. Entwickeln Sie ein „Gefühl“ für Dualität.
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
57
3 EINFACHE RLC-NETZWERKE IM ZEITBEREICH
3.1 Grundgesetze im Zeitbereich
Nun sollen der Strom und die Spannung beliebige Zeitabhängigkeit aufweisen. Formal wird dies
durch folgende Schreibweise ausgedrückt (kleine Buchstaben für zeitabhängige Grössen):
i(t):
u(t):
p(t):
Momentanwert des Stromes (allgemeiner zeitabhängiger Strom)
Momentanwert der Spannung (allgemeine zeitabhängige Spannung)
Momentanwert der Leistung (Definition später)
Die Grossbuchstaben (U, I, P) werden für konstante Grössen (DC) und für Mittelwerte (Effektivwerte) verwendet. Zusätzlich werden zwei neue, elementare Netzwerkelemente eingeführt.
Wird elektrische Energie einem elementaren Netzwerkelement (1-Tor) zugeführt, so sind
drei grundsätzliche Fälle zu unterscheiden. Wird die Energie verbraucht (in Wärme umgewandelt),
so ist das Element ein reiner Widerstand. Wird die Energie im magnetischen Feld gespeichert, so
handelt es sich um eine Spule. Und wird die Energie im elektrischen Feld gespeichert, so ist das
Element ein Kondensator. Ein praktisches Netzwerk besteht im Normalfall aus einer Kombination
der obigen drei Fälle.
Die beiden neuen Elemente sind also Energiespeicher, dabei wird die Energie im magnetischen Feld (Spule) oder im elektrischen Feld (Kondensator) gespeichert. Diese Speicher können
„gefüllt“ und auch wieder „entleert“ werden, wobei man beim Entleeren die gespeicherte Energie
vollständig zurückerhält (ideale Elemente).
Beim „Füllen“ der Speicher wirken die Elemente (Spule und Kondensator) als „Verbraucher“,
beim „Entleeren“ wirken sie hingegen als „Quellen“. Da im Durchschnitt keine Energie verloren geht,
bezeichnet man diese Elemente als verlustlose Elemente.
Bei idealen Elementen bleibt die Energie beliebig lang gespeichert, für diesen Zustand werden die
Klemmen beim Kondensator offen gelassen (konstante Spannung) und bei der Spule kurzgeschlossen (konstanter Strom).
Die notwendigen mathematischen Voraussetzungen sind u.a. die Differentialrechnung (Begriff der
Ableitung und Integralbegriff). In diesem Kapitel werden die Methoden (trotz fehlender Mathematik) so weit wie nötig verwendet. Die Verfahren werden an einfachen Beispielen demonstriert und
es wird grosser Wert auf Anschaulichkeit gelegt (graphische Interpretation). Für die grundlegende
Behandlung der Differentialrechnung wird auf die Mathematik verwiesen.
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
58
3.1.1 Widerstand
Strom i(t) und Spannung u(t) sind zueinander proportional. Der Proportionalitätsfaktor ist der Widerstandswert R. Formel (3.1) ist das ohmsche Gesetz am Widerstand für beliebige Zeitabhängigkeit. Figur 3-1 zeigt typische Verläufe von Strom und Spannung beim Widerstand.
R
i(t)
uR (t ) = R ⋅ i (t )
uR(t)
(3.1)
und
u, i
uR
i (t ) =
i
1
⋅ uR ( t )
R
t
mit
Widerstand in Ω
R:
Figur 3-1: Strom und Spannung beim Widerstand
3.1.2 Spule
Ein zeitlich ändernder Strom in einer Drahtschleife erzeugt ein zeitlich änderndes Magnetfeld
H
(Flussänderung). Diese Flussänderung induziert in der Drahtschleife ein elektrisches Gegenfeld ( E Wirbel), das der ursprünglichen Stromänderung entgegenwirkt. Die „induzierte Spannung“ ist
proportional zur zeitlichen Änderung des Stromes (Ableitung nach der Zeit). Der Proportionalitätsfaktor heisst Selbstinduktivität oder einfach Induktivität (der Drahtschleife). Formel (3.2) ist das
„ohmsche Gesetz an der Spule“ für beliebige Zeitabhängigkeit. Figur 3-2 zeigt typische Verläufe
von Strom und Spannung bei der Spule.
L
i(t)
uL (t ) = L ⋅
uL(t)
u, i
d i (t )
dt
(3.2)
und
uL
i
z
t
t
Figur 3-2: Strom und Spannung bei der Spule
1
i (t ) = ⋅ uL (τ ) d τ + i (t = 0)
L 0
mit
L:
Induktivität in H (Henry)
Das grundlegende Phänomen bei der Spule heisst Selbstinduktion und wird mit einer der Maxwell’schen Gleichungen begründet. Im folgenden Kurzkapitel wird, am Beispiel einer Drahtschlaufe, die Selbstinduktion mit Hilfe der erwähnten Maxwell’schen Gleichung veranschaulicht.
Selbstinduktion bedeutet, dass ein Stromanstieg (oder Abfall) „behindert“ wird. Oder populärer
formuliert: „Die Spule wehrt sich gegen eine Änderung des Stromes“.
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
59
Selbstinduktion (am Beispiel der Drahtschlaufe)
Ein stromführender Draht
H ist von einem Magnetfeld umgeben, wobei die Richtung des Stromes und
der Umlaufsinn des H -Feldes mit der Rechtsschraubenregel verknüpft sind (Teil einer Maxwell’schen Gleichung). Dieses Phänomen ist schon lange bekannt (Oersted, 1819) und kann experimentell einfach mit der Ablenkung einer Kompassnadel demonstriert werden. Figur 3-3 zeigt ein
stromdurchflossenes Drahtstück mit dem ihn umschliessenden Magnetfeld. (Die Theorie der Maxwell’schen Gleichungen wird erst in höheren Semestern vermittelt)
H
H (t )
i(t)
Figur 3-3: Stromdurchflossener Leiter und Magnetfeld
Die zugehörige Gleichung lautet
H H
rot H = j
H
H:
Magnetfeld in A/m
mit
H
j:
Stromdichte in A/m2
Jetzt wird eine Drahtschlaufe betrachtet, wobei der Strom zeitlich zunehmen soll (Stromänderung).
Die Stromzunahme „überträgt“ sich auch auf das magnetische Feld B (B = µ⋅H), so dass der ganze
Draht von einem (zeitlich) wachsenden Magnetfeld umgeben ist. Figur 3-4 zeigt diesen Zusammenhang. Im Innern der Schlaufe zeigen alle einzelnen B-Vektoren nach oben und können zu einem
„grossen B-Vektor“ zusammengefasst werden (Figur 3-5).
H
∂ B( t )
∂t
d i(t )
> 0
dt
H
∂ B (t )
∂t
d i(t )
> 0
dt
Figur 3-4: Drahtschlaufe mit zunehmendem Strom
und Magnetfeld
Figur 3-5: Einzelne Vektoren zusammengefasst zu
einem „grossem Vektor“
Die nun relevante Maxwell’sche Gleichung verknüpft eine
H zeitliche Änderung des Magnetfeldes
H
∂ B(t )
mit einem elektrischen Feld und lautet:
rot E = −
(3.3)
∂t
H
H
Dabei bedeutet rot v die „Rotation“ oder „Wirbligkeit“ (Wirbelstärke) des Feldes v (siehe Beispiel
H
H
mit Strömung in einem Fluss). Der Vektor der Rotation ( rot v ) ist mit dem Feldvektor v wieder
mit einer „Rechtsschraube“ verknüpft und steht senkrecht auf dem „Wirbel“ (Figur 3-6).
rot v
v - Wirbel
Figur 3-6: Feldvektor und Vektor der Rotation
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
60
H
H
∂ B(t )
Ersetzt man in Figur 3-5 den Vektor −
durch rot E (gemäss der Formel (3.3)) so erhält man
∂t
Figur 3-7 (Vorzeichenwechsel
gibt umgedrehte Richtung für den Vektor). Zeichnet man den der
H
Rotation entsprechenden E -Wirbel in die Figur ein (siehe auch Figur 3-6), so sieht man sehr schön,
H
dass der E -Wirbel dem Stromanstieg entgegenwirkt (Figur 3-8). Dieses Phänomen bezeichnet man
als Selbstinduktion.
H
rot E
H
E
d i(t )
> 0
dt
d i(t )
> 0
dt
Figur 3-7: Vektor −
H
∂ B(t )
∂t
H
durch rot E ersetzt
H
Figur 3-8: E -Wirbel hemmt Stromanstieg
Je nach Geometrie der Anordnung (gerader Draht, Schlaufe, Spiralspule, Zylinderspule, usw.) ist
dieser Effekt mehr oder weniger ausgeprägt und wird mit der Grösse der Induktivität L beschrieben.
Wird die „Beschreibungsebene der Felder“ verlassen und das Phänomen mit Strom und Spannung
ausgedrückt, so resultiert die Formel (3.2) (siehe auch Figur 3-2).
Das induzierte E-Feld (Figur 3-8) ist kein Potentialfeld, sondern ein sogenanntes Wirbelfeld. Im Kapitel 2.1.2 (Seite 15) werden Ladungen als Quellen des elektrischen Feldes postuliert
(Potentialfeld), der obige E-Wirbel ist auch ein elektrisches Feld (Wirbelfeld), das aber ein zeitlich
änderndes Magnetfeld als Ursache hat. Die beiden Ursachen für elektrische Felder sind in der folgenden Tabelle zusammengefasst.
Zwei Ursachen für E-Feld
Ladungen
Zeitlich änderndes magnetisches Feld
Bemerkungen zum E-Feld
- Potentialfeld (Quellenfeld)
- Feldlinien mit Anfang und Ende
- Definition der Spannung sinnvoll (wegunabhängig)
- Wirbelfeld (kein Potentialfeld)
- geschlossene Feldlinien
(- Definition der Spannung sinnlos (wegabhängig))
Betrachtet man die Spule an den Klemmen (Wirkung nach aussen), so merkt man nichts vom „internen Wirbelfeld“ und es kann weiterhin mit dem Begriff der Spannung gearbeitet werden. Insbesondere gelten die bisherigen Grundgesetze uneingeschränkt (Knotensatz und Maschensatz); sie sind
jetzt, für zeitabhängige Grössen, zu jedem Zeitpunkt erfüllt.
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
61
3.1.3 Kondensator
Der Kondensator besteht aus zwei Leitern, die durch einen Isolator getrennt sind (z.B. Plattenkondensator). Eine solche Anordnung ist in der Lage, elektrische Ladungen zu speichern. Das Mass für
das Ladungsspeichervermögen heisst Kapazität und wird in Farad angegeben. Figur 3-9 zeigt Symbol und einen typischen Strom- und Spannungsverlauf für den Kondensator. Formel (3.4) ist das
„ohmsche Gesetz am Kondensator“ für beliebige Zeitabhängigkeit.
C
i(t)
z
t
uC (t ) =
uC(t)
u, i
1
⋅ i (τ ) d τ + uC (t = 0)
C 0
(3.4)
und
uC
i
i (t ) = C ⋅
t
mit
C:
d uC (t )
dt
Kapazität in F (Farad)
Figur 3-9: Strom und Spannung beim Kondensator
Vergleicht man (2.10) mit (3.4) so stellt man fest, dass die Spannung am Kondensator proportional
z
t
zur Ladung ist. Das Integral i (τ ) d τ ist nämlich gerade die gespeicherte Ladung, so dass gilt:
0
qC (t ) = C ⋅ uC (t )
(3.5)
Die Proportionalitätskonstante zwischen der Ladung und der Spannung ist die Kapazität C. Aus
(3.5) ist auch ersichtlich, dass die Einheit F (Farad) ein Ersatz für As/V darstellt. Mit (3.2) und (3.4)
sieht man leicht, dass die Elemente Kondensator und Spule zueinander dual sind.
3.1.4 Momentanleistung und Energie
Wie in der Gleichstromlehre (2.18) wird die Leistung als Produkt von Strom und Spannung definiert, wobei jetzt aber Strom und Spannung zeitabhängige Grössen sind. Man bezeichnet diese Leistung als Momentanleistung und schreibt:
p(t ) = u( t ) ⋅ i ( t )
mit p(t):
(3.6)
Momentanleistung in W (Watt)
Im allgemeinen Fall wird auch p(t) eine zeitabhängige Funktion. Der Grossbuchstabe P wird für
konstante Leistung oder mittlere Leistung (siehe später) verwendet.
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
62
Für die Energie definiert man:
z
t
w(t ) = p(τ ) d τ + w ( t = 0)
(3.7)
0
Ob ein 1-Tor momentan „aktiv oder passiv wirkt“, kann wiederum mit dem Vorzeichen von p(t)
entschieden werden (Zählpfeile beachten). Ist z.B. ein 1-Tor mit dem VZS bepfeilt, so bedeuten:
das 1-Tor ist für diese Zeitpunkte eine Last (nimmt Leistung auf)
das 1-Tor ist für diese Zeitpunkte eine Quelle (gibt Leistung ab)
p(t) > 0:
p(t) < 0:
Für die beiden Beispiele Spule und Kondensator (Figuren 3-2 und 3-9) wird zusätzlich zu Strom
und Spannung noch die Momentanleistung p(t) skizziert. Figur 3-10 und Figur 3-11 zeigen die entsprechenden Diagramme.
L
i(t)
uL(t)
u, i
C
i(t)
uC(t)
u, i
uL
uC
i
i
t
p
t
p
p(t)
p(t)
t
p(t ) = u( t ) ⋅ i (t )
Figur 3-10: p(t) bei der Spule (Beispiel)
t
p ( t ) = u( t ) ⋅ i ( t )
Figur 3-11: p(t) beim Kondensator (Beispiel)
Aufg3-1: Kontrollieren Sie in obigen Figuren den Verlauf der Leistung p(t).
Aufg3-2: Tragen Sie in obigen Figuren ein, wo die Spule (der Kondensator) aktiv, und wo die Spule
(der Kondensator) passiv wirkt.
Aufg3-3: Nehmen Sie an, obige beiden p(t) seien periodisch. Schätzen Sie die Mittelwerte der p(t)
ab. Kommentieren Sie das Resultat.
{Aufg3-4 ... Aufg3-9}
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
63
3.2 Periodische Zeitabhängigkeit (Wechselgrössen)
3.2.1 Definitionen und Begriffe
Die periodischen Funktionen bilden eine wichtige Klasse innerhalb der Funktionen mit beliebiger
Zeitabhängigkeit. Bei einer periodischen (Zeit-) Funktion wiederholt sich der Verlauf der zeitlichen
Änderung nach Ablauf einer Periodendauer T. Mit n als ganzer Zahl gilt also für eine periodische
Funktion allgemein:
s(t ) = s(t + nT )
(3.8)
Die „neutrale Bezeichnung“ s(t) steht für irgendeine elektrische Grösse wie z.B. Strom i(t), Spannung u(t) oder Leistung p(t). Figur 3-12 zeigt eine periodische Zeitfunktion. Markante Werte wie
Periodendauer, Maximalwert und Minimalwert sind in der Figur eingetragen.
s(t)
smax
mit
t
0
smin
T
s(t):
Momentanwert
T:
Periodendauer (s)
smax:
smin:
Maximalwert von s
Minimalwert von s
Figur 3-12: Periodische Zeitabhängigkeit einer Funktion s(t)
Handelt es sich um eine sinus- oder cosinusförmige Zeitabhängigkeit, so spricht man von harmonischer Zeitabhängigkeit oder harmonischen Funktionen. So schreibt man z.B. für eine allgemeine, harmonisch zeitabhängige Spannung:
u(t) = Û⋅cos(ω⋅t + ϕ0)
wobei u:
Û:
ω:
ϕ0:
Momentanwert (V)
Spitzenwert, Scheitelwert, Amplitude (V)
Kreisfrequenz (s–1)
Nullphasenwinkel (rad)
und
Frequenz (Hz)
f:
(3.9)
Mit der 2π-Periodizität der Cosinusfunktion ergeben sich die folgenden Zusammenhänge für Frequenz, Kreisfrequenz und Periodendauer:
f =
1
T
ω=
2π
T
oder
T=
1
f
(3.10)
oder
T=
2π
ω
(3.11)
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
64
Die Frequenz f gibt somit die Anzahl der in einer Sekunde durchlaufenen Perioden an. Mit (3.10)
und (3.11) sieht man, dass sich Frequenz und Kreisfrequenz um den Faktor 2π unterscheiden:
ω = 2π ⋅ f
(3.12)
Auch bei den Einheiten unterscheidet man zwischen der Frequenz und der Kreisfrequenz, es gelten
nämlich:
[ f ] = Hz (Hertz)
[ ω ] = rad/s = s–1
Figur 3-13 zeigt eine harmonische Zeitabhängigkeit am Beispiel eines Stromes i(t).
i(t)
Î
t
0
i (t ) = I ⋅ cos(ω t − ϕ 0 )
ϕ 0/ ω
−Î
T = 1/f = 2π/ ω
Figur 3-13: Harmonische Zeitabhängigkeit für Strom i(t)
Die harmonische Zeitabhängigkeit ist der wichtigste Fall für die Elektrotechnik; Kap. 4 ist ausführlich diesem Thema gewidmet.
3.2.2 Mittelwerte
Bei nichtharmonischer Zeitabhängigkeit sagt der Scheitelwert nichts über den Verlauf der Funktion
aus (siehe Figur 3-12). Da der Verlauf aber massgebend ist für die summarischen Wirkungen, z.B.
der Energie, die mit einem Strom auftritt (für einen bestimmten Zeitabschnitt), ist es zweckmässig,
Kennwerte zu definieren, die die mittleren Wirkungen - z.B. von Leistung, Strom oder Spannung unabhängig von ihrer Kurvenform wiedergeben. Man unterscheidet ganz allgemein für zeitabhängige periodische (also auch nichtharmonische) Wechselgrössen folgende Kennwerte:
Linearer Mittelwert
Dieser Mittelwert wird auch als arithmetischer Mittelwert bezeichnet. Die „Ingenieure“ sprechen
auch vom DC-Anteil oder Gleichstromanteil (Gleichspannungsanteil). Für harmonische Zeitfunktionen ist der Wert natürlich Null (bitte verifizieren). Formel (3.13) zeigt die Berechnung des linearen Mittelwertes.
z
T
1
x = x = ⋅ x (t )dt
T 0
(3.13)
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
65
Betragsmittelwert (Gleichrichtmittelwert)
In der elektrischen Messtechnik spielt der Betragsmittelwert eine wichtige Rolle. Die Wechselgrösse wird zuerst gleichgerichtet und anschliessend gemittelt (Glättung). Bei elektrolytischen Vorgängen ist dieser Mittelwert ebenfalls von Bedeutung und heisst auch elektrolytischer Mittelwert.
(3.14) zeigt die Definition des Betragsmittelwerts.
z
T
x = x =
1
⋅ x (t ) dt
T 0
(3.14)
Effektivwert (Quadratischer Mittelwert)
Berechnet man an einem ohmschen Widerstand die Momentanleistung mit p(t) = u(t)⋅i(t) und setzt
(3.1) ein, so erhält man: p(t) = i2⋅R, oder p(t) = u2/R. Strom und Spannung treten quadratisch in
der Formel für die Leistung p(t) auf. Man bestimmt durch Mittelwertbildung der Leistung p(t) die
mittlere Leistung P und erhält (Definition von P):
z
T
1
P = p(t ) = ⋅ p(t )dt
T 0
(3.15)
Diese mittlere Leistung P ist nun massgebend für die Wärmewirkung oder die umgesetzte „Wirk–
leistung“ (im Widerstand). Daher bezeichnet man P als Wirkleistung (siehe auch später). Jetzt
denkt man sich einen Gleichstrom I so, dass die Gleichstromleistung identisch mit obiger mittlerer
Leistung wird:
T
1
2
I ⋅ R = ⋅ R ⋅ i 2 (t )dt
T 0
z
Division durch R und aufgelöst nach I ergibt:
z
T
I = I eff =
1
⋅ i 2 ( t ) dt
T 0
(3.16)
Die Grösse dieses (fiktiven) Gleichstroms I bezeichnet man als Effektivwert Ieff des Wechselstro–
mes i(t). Führt man eine analoge Rechnung mit der Spannung durch, so erhält man für den Effektivwert Ueff der Spannung u(t):
z
T
U = U eff
1
=
⋅ u 2 ( t ) dt
T 0
(3.17)
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
66
Werden (bei einer Wechselgrösse) die Indizes weggelassen, so ist damit immer der Effektivwert
der Wechselgrösse gemeint (internationale Konvention). Somit ergeben sich folgende Bedeutungen
für die Schreibweisen:
Art der Grösse
Schreibweise
Bedeutung
Gleichstrom
Gleichspannung
I, IDC, U, UDC
Wert des Gleichstromes (Wert der Gleichspannung)
Wechselgrösse
I, Ieff, Irms, U, Ueff, Urms
Effektivwert der Wechselgrösse
Dabei bedeuten die Indizes „rms = root mean square“; nämlich: „ziehe die Wurzel aus dem gemittelten Quadrat der Funktion“ (man vergleiche mit (3.16) und (3.17)). Formel (3.18) ist die allgemeine Definition des Effektivwertes für eine beliebige Wechselgrösse x(t).
z
X eff = x =
1
⋅ x 2 (t )dt
T 0
z
T
T
2
X eff
2
1
= x = ⋅ x 2 (t )dt
T 0
2
(3.18)
Man merke sich:
Die Wirkleistung P ist der lineare Mittelwert der (periodischen) Momentanleistung p(t).
Bei einem Widerstand ist die Wirkleistung P proportional zum Quadrat des Effektivwertes
(Strom oder Spannung): P ~ Ieff2 oder P ~ Ueff2.
In der Elektrotechnik gibt man Wechselgrössen meistens mit Hilfe des Effektivwertes an. So ist z.B.
bei der Netzspannung die Angabe U = 230 V der Effektivwert der Wechselspannung. Meint man etwas anderes als den Effektivwert, so muss das explizit angegeben werden, z.B. den Spitzenwert
einer Quellenspannung mit Ûq = 225 mV.
Übliche Strom- und Spannungsmessgeräte sind immer so ausgelegt, dass sie für harmonische
Zeitabhängigkeit (Sinusgrössen) den Effektivwert anzeigen, obwohl die interne Signalverarbeitung z.B. den Betragsmittelwert misst (und nicht den Effektivwert). Misst man mit einem solchen
Messgerät nichtharmonische Zeitfunktionen (z.B. Dreieck, Rechteck, Sägezahn, usw.), so erhält
man eine falsche Anzeige. Deshalb werden die beiden folgenden Kenngrössen für periodische Zeitfunktionen definiert.
Scheitelfaktor SF
SF = I / I = U / U
(3.19)
Als Scheitelfaktor bezeichnet man ganz allgemein das Verhältnis von Scheitelwert zu Effektivwert.
.
. Nur beim WiderFür harmonische Zeitabhängigkeit beträgt der Scheitelfaktor SF = 2 ≈ 1414
stand ist der Scheitelfaktor für Strom und Spannung gleich gross; für ein beliebiges Eintor kann er
unterschiedliche Werte annehmen, wenn die Kurvenformen von Strom und Spannung voneinander
abweichen. (Die Definition (3.19) ist nur sinnvoll für „symmetrische Spitzenwerte“, d.h. umax = –
umin oder imax = –imin).
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
67
Formfaktor FF
FF = I / i = U / u
(3.20)
Der Formfaktor stellt das Verhältnis von Effektivwert zu Betragsmittelwert dar und wird gern zur
Beurteilung der Kurvenform (insbesondere bei nichtharmonischen Wechselgrössen) herangezogen.
Für harmonische Zeitabhängigkeit beträgt der Formfaktor FF = π (2 2 ) ≈ 1111
.
.
Mit einem Elektronenstrahloszilloskop (KO) kann dem zeitlichen Verlauf von Spannung u und
Strom i gefolgt werden, so dass bei entsprechender Zeitablenkung der Kurvenverlauf betrachtet
werden kann. Normale Drehspulmessgeräte haben dagegen eine so grosse träge Masse, dass der
Zeiger den Zeitwerten nicht mehr folgen kann, sondern sich auf den linearen Mittelwert nach (3.13)
einstellt. Bei „reinem“ Wechselstrom (mittelwertfrei) bleibt er daher auf Null stehen. Schaltet man
dem Drehspuhlmesswerk einen Gleichrichter vor, so zeigt es den entsprechenden Gleichrichtmittelwert (Betragsmittelwert). Das Dreheisenmessgerät stellt sich bei genügender Trägheit des Messwerks auf den Effektivwert der Wechselgrösse ein. Für Einzelheiten der Messgeräte und Verfahren
wird auf die Literatur verwiesen.
{Aufg3-13 ... Aufg2-19}
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
68
3.3 Ein- und Ausschaltvorgänge (Transientes Verhalten)
Bei den bisherigen Beispielen mit RLC-Netzwerken war entweder der Strom- oder der Spannungsverlauf vorgegeben (Aufg3-4 ... Aufg3-9). Im allgemeinen Fall sind der zeitliche Strom- und Spannungsverlauf unbekannte Grössen. Stellt man für ein beliebiges RLC-Netzwerk z.B. die Maschengleichung auf und setzt die „ohmschen Gesetze“ [(3.1), (3.2) und (3.4)] ein, so resultiert eine
sogenannte Differentialgleichung (DGL). Die Lösung der DGL (zusammen mit den Anfangsbedingungen) beschreibt dann die gesuchte Grösse, nämlich die zeitabhängige Spannung (oder den
zeitabhängigen Strom). Die mathematischen Voraussetzungen zur Behandlung von Netzwerken im
Zeitbereich sind also Kenntnisse von Differentialgleichungen und Methoden zur Lösung derselben.
Die folgenden Kapitel sind beschränkt auf „Ein- und Ausschaltvorgänge“ an RC- oder RL-Netzwerken, bei denen die Lösungsfunktionen der DGL’s von der gleichen Struktur sind (Exponentialfunktionen).
3.3.1 RC-Netzwerke
Als einführendes Beispiel wird der Aufladevorgang eines Kondensators untersucht. Figur 3-14
zeigt das RC-Netzwerk und die angelegte Spannung u1(t). Zum Zeitpunkt t = 0 wird der Schalter S
geschlossen; d.h. für t ≥ 0 gilt u2(t) = u1(t). Der Kondensator ist ungeladen (uC(t<0)=0).
R
S
i(t)
u2(t)
U0
u1(t) = U0
u2(t)
C
uC(t)
t=0
t
0
Figur 3-14: Aufladen eines Kondensators: Schalter S wird zum Zeitpunkt t = 0 geschlossen
Wie sehen die zeitlichen Verläufe von Kondensatorspannung uC(t) und Strom i(t) aus? Mit dem Maschensatz ergibt sich (nach dem Schliessen des Schalters):
− u2 (t ) + i (t ) ⋅ R + uC (t ) = 0
mit u2(t) = U0 und i (t ) = C ⋅
duC (t )
= C ⋅ uC (t ) erhält man:
dt
R ⋅ C ⋅ uC (t ) + uC (t ) = U 0 ,
uC (0) = 0
(3.21)
Gleichung (3.21) ist die zu Figur 3-14 zugehörige Differentialgleichung; die Lösung der DGL beschreibt dann den Verlauf der Kondensatorspannung uC(t). Ohne weitere mathematische Vertiefung
der „DGL-Theorie“ wird jetzt die Lösung von (3.21) angegeben:
c
h
uC (t ) = U 0 ⋅ 1 − e − t /τ , mit τ = R ⋅ C
(3.22)
Durch Einsetzen von (3.22) in (3.21) kann die Gültigkeit der Lösung verifiziert werden. Gleichung
(3.22) ist der „klassische Spannungsverlauf“ („Ladekurve“) für die Aufladung eines Kondensators
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
69
und wird nun ausführlich diskutiert. Das Produkt τ = RC bezeichnet man als Zeitkonstante der
Schaltung (siehe auch Figur 3-14). Figur 3-15 zeigt den Spannungsverlauf am Kondensator.
uC(t)
U0
uC(t = –0) = 0
uC(t = +0) = 0
uC(t = 1⋅τ) ≈ 0.63⋅U0
uC(t = 2⋅τ) ≈ 0.86⋅U0
uC(t = 3⋅τ) ≈ 0.95⋅U0
uC(t = 5⋅τ) ≈ 0.99⋅U0
uC(t → ∞ ) = U0
99%
86%
63%
0
t
τ
0
2τ
3τ
4τ
c
h
uC (t ) = U 0 ⋅ 1 − e − t /τ , τ = RC
5τ
Figur 3-15: Aufladen eines Kondensators: Spannungsverlauf und markante Werte
Die Anfangssteigung der Kurve (bei t = 0) kann mit dem Abtragen der Zeitkonstanten τ konstruiert
werden (siehe Figur). Markante Punkte sind z.B. 63% vom Endwert nach einer Zeitkonstanten und
99% vom Endwert nach fünf Zeitkonstanten (Kondensator ist „praktisch“ geladen). Die Gleichung
(3.22) zusammen mit der Figur 3-15 sind von elementarer Bedeutung und müssen jederzeit abrufbereit sein.
U − u (t )
Der Strom i(t) kann berechnet werden mit i (t ) = C ⋅ uC (t ) , oder i (t ) = 0 C
(siehe auch Figur
R
3-14). Für den Strom ergibt sich damit (3.23). Figur 3-16 zeigt den typischen Stromverlauf.
i (t ) =
U 0 − t /τ
⋅ e , mit τ = R ⋅ C
R
(3.23)
i(t)
U0/R
i(t = –0) = 0
i(t = +0) = U0/R
i(t = 1⋅τ) ≈ 0.37⋅U0/R
i(t = 2⋅τ) ≈ 0.14⋅U0/R
i(t = 3⋅τ) ≈ 0.05⋅U0/R
i(t = 5⋅τ) ≈ 0.01⋅U0/R
i(t → ∞ ) = 0
37%
14%
1%
0
0
τ
2τ
3τ
4τ
t
5τ
Figur 3-16: Aufladen eines Kondensators: Stromverlauf und markante Werte
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
70
Auch hier kann die Anfangssteigung der Kurve (bei t = +0) mit dem Abtragen der Zeitkonstanten τ
konstruiert werden (siehe Figur). Markante Punkte sind z.B. 37% vom Anfangswert nach einer
Zeitkonstanten und 1% vom Anfangswert nach fünf Zeitkonstanten (Kondensator ist „praktisch“
geladen, es fliesst „kein Strom“ mehr). Die Gleichung (3.23) zusammen mit der Figur 3-16 sind
wiederum grundlegend und wichtig.
Betrachtet man den Spannungs- und Stromverlauf am Kondensator (Figur 3-15 und Figur 316), so sind folgende Besonderheiten festzuhalten:
- Die Spannung am Kondensator springt nicht!
- Für t = 0 wirkt der Kondensator wie ein Kurzschluss (uC = 0)
- Für t = 0 fällt die ganze Spannung über dem Widerstand ab, und somit ist i(t=0) = U0/R
Aufg3-20: Am vorherigen Beispiel (Figur 3-14) sind folgende Aufgaben zu lösen:
- Welchen Verlauf weist die Spannung über dem Widerstand auf? (Formel)
- Welchen Verlauf weist die Kondensatorladung q(t) auf? (Formel)
- Wie gross ist die gespeicherte Energie WC im geladenen Kondensator? (t → ∞), (Formel)
- Berechnen Sie die von der Quelle abgegebenen Leistung p(t). (Formel, Skizze)
- Berechnen Sie die von der Quelle abgegebene Energie WQ. (Formel)
- Berechnen Sie die im Widerstand verheizte Energie WR. (Formel)
∞
1
e − ax dx = , a > 0
Hilfreiches Integral:
a
0
z
Als zweites Beispiel wird der Entladevorgang eines Kondensators untersucht. Ein anfänglich
geladener Kondensator wird über einen Widerstand entladen. Figur 3-17 zeigt das RC-Netzwerk mit
der Anfangsspannung U0 des Kondensators. Zum Zeitpunkt t = 0 wird der Schalter S geschlossen;
d.h. für t ≥ = 0 gilt uR(t) = uC(t).
S
uC(t)
C
i(t)
R
uR(t)
mit uC(t < 0) = U0
(anfänglich geladener Kondensator)
Figur 3-17: Entladen eines Kondensators: Schalter S wird zum Zeitpunkt t = 0 geschlossen
Mit dem Maschensatz ergibt sich (nach dem Schliessen des Schalters):
uC (t ) − uR (t ) = 0
mit uR(t) = R⋅i(t) und i (t ) = − C ⋅
duC (t )
= − C ⋅ uC (t ) erhält man (Zählpfeile beachten!):
dt
uC (t ) + R ⋅ C ⋅ uC (t ) = 0 ,
uC (0) = U 0
(3.24)
Gleichung (3.24) ist die zu Figur 3-17 zugehörige Differentialgleichung; die Lösung der DGL beschreibt dann den Verlauf der Kondensatorspannung uC(t). Auch hier wird die Lösung von (3.24)
angegeben (ohne Herleitung):
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
71
uC (t ) = U 0 ⋅ e − t /τ , mit τ = R ⋅ C
(3.25)
Durch Einsetzen von (3.25) in (3.24) kann die Gültigkeit der Lösung verifiziert werden. Gleichung
(3.25) ist der Spannungsverlauf für die Entladung eines Kondensators („Entladekurve“). Das Produkt τ = RC ist wieder die Zeitkonstante der Schaltung (siehe auch Figur 3-17). Mit
i (t ) = uR (t ) R = uC ( t ) R erhält man für den Strom:
i (t ) =
U 0 − t /τ
⋅ e , mit τ = R ⋅ C
R
(3.26)
Spannungs- und Stromverlauf für die Kondensatorentladung sind in folgenden beiden Figuren dargestellt.
uC(t)
i(t)
U0
U0/R
0
t
0
τ
2τ
3τ
4τ
5τ
S wird geschlossen
Figur 3-18: Kondensatorentladung: Spannungsverlauf
0
t
0
τ
2τ
3τ
4τ
5τ
S wird geschlossen
Figur 3-19: Kondensatorentladung: Stromverlauf
Vergleicht man die „Aufladung“ mit der „Entladung“ des Kondensators, so sind folgende Bemerkungen angebracht:
- Der Stromverlauf ist für beide Fälle identisch (Richtung hat geändert!)
- Die Spannung am Kondensator springt nicht
- Alle Lösungsfunktionen für Strom und Spannung enthalten die Exponentialfunktion
Für transientes Verhalten (Ein- und Ausschaltvorgänge) in RC-Netzwerken (und RL-Netzwerken)
ist die Exponentialfunktion von äusserster Wichtigkeit, da sie den „Kern“ der Lösungsfunktionen
für Strom und Spannung bildet.
Aufg3-21: Am vorherigen Beispiel (Figur 3-17) sind folgende Aufgaben zu lösen:
- Skizzieren Sie die Leistung p(t) im Widerstand R. (Formel)
- Welche Energie WR wird im Widerstand in Wärme umgesetzt? (Formel)
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
72
Für die folgenden Beispiele wird nicht mehr die DGL hergeleitet und gelöst; sondern mit „Plausibilitätsüberlegungen“ wird die Lösungsfunktion „erahnt“ und anschliessend verifiziert. Dabei sollen
die bisherigen Erfahrungen und Kenntnisse einfliessen:
-
Am Kondensator springt die Spannung nicht
Im Endzustand (C vollständig geladen oder vollständig entladen) ist der Strom iC = 0
Die Exponentialfunktion e − t /τ kommt „irgendwie“ in der Lösung vor
Für t = 0 und t → ∞ Zustand des Netzwerkes (Strom und Spannung) überlegen
Bsp3-1: Umladen eines Kondensators: Der Kondensator ist bis zur Zeit t = 0 geladen mit der
Spannung U1. Zur Zeit t = 0 wird der Schalter S umgelegt und über einen Widerstand die Spannung
U2 angeschlossen (Figur 3-20).
R
U2
t=0
U1
i(t)
C
uC(t)
Figur 3-20: Umladen eines Kondensators
1. Überlegungen für t = 0 und t → ∞
t = 0: uC(0) = U1
t→∞: uC(∞) = U2
2. Übergang von U1 auf U2 mit „e-Funktion“
Änderung am Anfang gross, gegen Ende
klein
3. Skizzieren der Kondensatorspannung
4. „Formel überlegen“
Je nach Vorzeichen und Grösse der Spannungen U1 und U2 ergeben sich (optisch) verschiedene
Fälle für den Spannungsverlauf uC(t). Vier typische Spannungsverläufe sind im Folgenden skizziert:
uC(t)
uC(t)
U2
U1
U1
0
0
t
U2
Figur 3-22: U1 > 0, U2 < U1
Figur 3-21: U1 > 0, U2 > U1
uC(t)
0
U1
U2
Figur 3-23: U1 < 0, U2 < U1
t
uC(t)
0
t
t
U2
U1
Figur 3-24: U1 < 0, U2 > U1
Wie heisst nun die Formel für den jeweiligen Spannungsverlauf? Ist für jeden der vier Fälle eine eigene Formel anzugeben? Selbstverständlich genügt eine Formel für alle Fälle (identisches Netzwerk); die Lösung der DGL hängt nicht vom Vorzeichen oder den Werten der Spannungen
U1 und U2 ab. Die Formel für die (transiente) Kondensatorspannung wird gemäss folgendem „Rezept“ zusammengesetzt:
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
Wert bei t = ∞
73
uC(∞ )
Wert bei t = 0
uC(0)
[
]
uC (t ) = uC (0) + uC ( ∞) − uC (0) ⋅ (1 − e − t /τ )
uC(0)
"Übergangsfunktion"
Wert bei t = 0
uC(∞ )
Setzt man uC(0) = U1 und uC(∞) = U2 ein, so ergibt sich:
c
b
h
g
uC (t ) = U 1 + U 2 − U1 ⋅ 1 − e − t /τ = U 2 + U 1 − U 2 ⋅ e − t /τ
(3.27)
Formel (3.27) deckt also alle Fälle für eine Kondensatorumladung aus Figur 3-20 ab. Insbesondere
sind auch die beiden Fälle
U1 = 0, U2 > 0: Aufladung eines Kondensators
U1 > 0, U2 = 0: Entladung eines Kondensators
darin enthalten. Damit sind sie am Anfang durchgeführten Beispiele zur Auf- und Entladung eines
Kondensators nur noch Spezialfälle des allgemeinen Falles einer Kondensatorumladung gemäss
Formel (3.27).
Aufg3-22: Skizzieren Sie für das Bsp3-1 den Strom (durch den Kondensator) für alle vier abgebildeten Fälle. Geben Sie eine allgemeine Formel für den Strom an. Wie berechnet sich die Zeitkonstante τ im Bsp3-1?
Bsp3-2: Ein (ungeladener) Kondensator wird mit zwei Widerständen (Spannungsteiler) aufgeladen.
Figur 3-25 zeigt die Schaltung und die angelegte schrittförmige Quellenspannung. Gesucht ist die
zeitabhängige Kondensatorspannung uC(t) (Skizze und Formel). Auch diese Aufgabe soll mit „gezieltem Überlegen“ gelöst werden.
i1(t)
R1
iC(t)
u1(t)
U0
u1(t)
R2
C
uC(t)
t=0
t
0
Figur 3-25: Kondensatoraufladung mit zwei Widerständen
1.
2.
3.
Spannung am Kondensator springt nicht Þ uC(0) = 0
Für t → ∞ wird iC(∞) = 0, d.h. uC(∞) = U0⋅R2/(R1+R2)
Übergang von uC(0) auf uC(∞) mit 1− e − t /τ
4.
5.
Zeitkonstante überlegen/sehen (Quellen abschalten!!): τ = C⋅(R1||R2)
Skizze machen und Formel für uC(t) aufschreiben
c
h
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
74
Mit obigem Vorgehen erhält man für uC(t):
uC (t ) = 0 + [U 0 ⋅
c
h
c
h
c
R2
R2
− 0] ⋅ 1 − e − t /τ = U 0 ⋅
⋅ 1 − e − t /τ ,
R1 + R2
R1 + R2
τ = C ⋅ R1 R2
h
In der folgenden Figur ist der Spannungsverlauf am Kondensator skizziert.
uC(t)
U0
U0 ⋅
R2
R1 + R2
t
τ
Figur 3-26: Spannungsverlauf am Kondensator (Netzwerk in Figur 3-25)
Aufg3-23: Skizzieren Sie für das Bsp3-2 die Ströme i1(t) und iC(t). Geben Sie für beide Ströme die
Formel an.
Bsp3-3: Während des Aufladevorganges eines Kondensators springt die angelegte Spannung auf einen neuen (konstanten) Wert. Fig. 3-27 zeigt die Schaltung und die angelegte Spannung. Gesucht ist
die zeitabhängige Kondensatorspannung uC(t) (Skizze und markante Werte).
R1
u1(t)
iC(t)
u1(t)
C
U1
t=0
uC(t)
U2
t = t1
t
0
Figur 3-27: Kondensatoraufladung mit Änderung der Spannung während der Aufladung
Bis zum Zeitpunkt t = t1 handelt es sich um eine (klassische) Aufladung; zum Zeitpunkt t1 besitzt
der Kondensator eine bestimmte Spannung uC(t1) (noch zu berechnen). Für t > t1 wird der Kondensator von uC(t1) auf U2 umgeladen. In der Figur 3-28 ist die Kondensatorspannung skizziert (Im
Beispiel wurde t1/τ = 0.8 gewählt).
uC(t)
U1
uC(t1)
uC(t1)
0
U2
t = t1
τ
2τ
τ
Figur 3-28: Spannungsverlauf am Kondensator
(Aufgabe in Figur 3-27)
3τ
4τ
t
τ = R1⋅C
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
75
Setzt man t = t1 in die „Aufladekurve“ ein, so erhält man für die Kondensatorspannung beim Umschaltpunkt: uC (t1 ) = U 1 ⋅ 1 − e − t1 /τ . Mit dieser Spannung wird dann der Umladevorgang auf U2 ge-
c
h
startet (neuen Zeitnullpunkt bei t = t1 annehmen).
Aufg3-24: Am vorherigen Beispiel (Figur 3-28) sind folgende Aufgaben zu lösen:
- Geben Sie Formeln für den Spannungsverlauf an (neue t-Achse bei t1 einführen)
- Skizzieren Sie den Strom iC(t) (Formeln und markante Punkte eintragen)
- Skizzieren Sie uC(t) für τ << t1
3.3.2 RL-Netzwerke
Für die Behandlung von RL-Netzwerken macht man sich die Dualität zu Nutze: Das duale Netzwerk von einem beliebigen RC-Netzwerk ist ein RL-Netzwerk. Alle bisher (bei RC-Netzwerken)
gewonnenen Erkenntnisse können auf RL-Netzwerke übertragen werden, wenn man Strom und
Spannung vertauscht. Die wichtigsten Erkenntnisse beim Kondensator übersetzt man wie folgt auf
die Spule („Aufladen des Kondensators“ → “Magnetisieren der Spule“, „Entladen des Kondensators“ → „Entmagnetisieren der Spule“):
- In der Spule springt der Strom nicht
- Im Endzustand (vollständig magnetisiert oder entmagnetisiert) ist die Spannung uL = 0
- Die Exponentialfunktion e − t /τ kommt „irgendwie“ in der Lösung vor
- Für t = 0 und t → ∞ Zustand des Netzwerkes (Strom und Spannung) überlegen
Auch das „Ummagnetisieren“ von einem Anfangsstrom auf einen Endstrom kann analog zum Kondensator beschrieben werden (wobei zum Zeitpunkt t = 0 „geschaltet“ wird):
Wert bei t = ∞
i L (∞ )
Wert bei t = 0
i L (0)
[
]
iL (t ) = iL (0) + iL ( ∞) − iL (0) ⋅ (1 − e − t /τ )
i L (0)
"Übergangsfunktion"
Wert bei t = 0
i L (∞ )
Diese „Rezepte“ und Erkenntnisse sollen jetzt direkt an Beispielen geübt werden (ohne weitere
Theorie). Man überlege sich, was bei der Dualitätsumwandlung mit der Zeitkonstanten τ = RC passiert?
Aufg3-25: Zum Zeitpunkt t = 0 wird der Strom i1(t) eingeschaltet. Berechnen Sie den Spulenstrom iL(t) und die Spannung u(t) (Skizzen und Formeln). Untersuchen Sie zusätzlich die Energiebilanz.
iL(t)
i1(t)
i1(t)
I0
R
L
u(t)
t=0
0
t
aet/nik
3 Einfache RLC-Netzwerke im Zeitbereich
76
Aufg3-26: Ummagnetisieren einer Spule: Der Schalter S wird zur Zeit t = 0 umgelegt. Berechnen
Sie den Strom iL(t) (Skizze und Formel). Wieviel Energie wird während des transienten Vorganges
im Widerstand in Wärme umgewandelt? Zu welchem Zeitpunkt wird der Strom iL(t) = 0.
t=0
I1
iL(t)
I1 = 10 A
I2 = – 5 A
I2
R
R = 10 Ω
L = 10 mH
L
Aufg3-27: Im skizzierten Netzwerk wird die Spannung u1(t) angelegt. Skizzieren und berechnen Sie
iL(t) und uL(t).
R1
u1(t)
iL(t)
R2
u1(t)
L
uL(t)
R1 = 10 kΩ
R2 = 15 kΩ
L = 20 mH
10 V
t=0
t
0
3.3.3 Übergang zum stationären Zustand
Bei allen bisherigen Beispielen (transientes Verhalten) hat es sich um „relativ einfache“ Schaltvorgänge gehandelt. Etwas schwieriger wird der Sachverhalt, wenn man z.B. periodisch ein- und ausschaltet: Da muss für jeden Zeitabschnitt das transiente Verhalten berechnet werden, und zwar so
oft, bis sich die Verläufe wiederholen (eingeschwungener Zustand, stationärer Zustand). Später werden effizientere Methoden eingeführt, die es ermöglichen, direkt den stationären Zustand zu berechnen (Zeigerrechnung, Fourierreihe, Fouriertransformation).
An einem (abschliessenden) Beispiel soll die Methode mit dem „fortgesetzten transienten
Verhalten“ gezeigt und geübt werden.
Aufg3-28: Zum Zeitpunkt t = 0 wird eine Spannungsquelle eingeschaltet, die ein periodisches
Rechtecksignal liefert. Die Spannung wird mit einem Tastverhältnis von 1:1 zwischen 10V und 0V
hin- und hergeschaltet. Ein einfaches RC-Glied dient als Tiefpassfilter.
u1(t)
R
u1(t)
Uq = 10 V
C
u2(t)
0
R = 1 kΩ
C = 0.25 µ F
-
0
0.4
T1/2
0.8
T1
1.2
t [ms]
Berechnen und skizzieren Sie die Ausgangsspannung u2(t) im Bereich 0...2 ms
Berechnen Sie den Mittelwert von u2(t) im eingeschwungenen Zustand
Berechnen Sie die Restwelligkeit u2pp im eingeschwungenen Zustand
Wie sieht u2(t) aus, für τ >> T1 (Einschwingen und stationärer Zustand)?
Aufg3-28a: Kontrollieren Sie obige Berechnungen mit einem Netzwerksimulator (z.B. PSpice).
aet/nik
4 Harmonische Zeitabhängigkeit
77
4 HARMONISCHE ZEITABHÄNGIGKEIT
4.1 Grundgesetze bei „Sinusstrom“
Die harmonische Zeitabhängigkeit ist der wichtigste (Spezial-) Fall für die Elektrotechnik. Die Begründung liegt in einer speziellen Eigenschaft der harmonischen Zeitabhängigkeit: Wird eine harmonische Funktion nach der Zeit abgeleitet, so entsteht wiederum eine harmonische Funktion (mit
Phasenverschiebung gegenüber der Originalfunktion). Bei der Integration nach der Zeit einer harmonischen Funktion ergibt sich ebenfalls wieder eine harmonische Zeitfunktion (phasenverschoben). Diese Eigenschaft ist äusserst wichtig und führt zu folgendem Verhalten von linearen Netzwerken (mit konzentrierten Elementen):
Kommt irgendwo im Netzwerk eine harmonische Funktion vor (Strom oder
Spannung), so weist das gesamte Netzwerk harmonische Zeitabhängigkeit auf
(jeder Strom und jede Spannung).
Liefern also die Quellen nur sinusförmige Ströme (und/oder sinusförmige Spannungen), so treten im
gesamten Netzwerk nur sinusförmige Ströme und Spannungen auf.
Für beliebige harmonische Zeitabhängigkeit werden für Strom und Spannung die folgenden
Schreibweisen verwendet (siehe auch Kap. 3.2.1):
i (t ) = I ⋅ cos(ω t + ϕ i ),
wobei u, i:
Û, Î:
ω:
ϕu:
ϕi:
u(t ) = U ⋅ cos(ω t + ϕ u )
(4.1)
Momentanwerte
Amplituden (Spitzenwerte)
Kreisfrequenz ( ω = 2π f )
(Null-) Phasenwinkel der Spannung
(Null-) Phasenwinkel des Stromes
Die Phasenverschiebung zwischen Strom und Spannung definiert man z.B. mit ∆ϕ = ϕ u − ϕ i . Die
Spannung eilt dann dem Strom um ∆ϕ voraus.
Die im Kapitel 3.1 angegebenen Grundgesetze im Zeitbereich für Widerstand (3.1), Spule
(3.4) und Kondensator (3.2) werden jetzt auf harmonische Zeitabhängigkeit angewendet.
4.1.1 Widerstand
Mit der Proportionalität am Widerstand uR (t ) = R ⋅ i (t ) erhält man:
i (t ) = I ⋅ cos(ω t + ϕ ),
u (t ) = R ⋅ I ⋅ cos(ω t + ϕ )
i
R
uR (t ) = U R ⋅ cos(ω t + ϕ u ),
i
U R = R ⋅ I,
Strom und Spannung sind beim Widerstand „in Phase“ ( ∆ϕ = 0 ).
ϕu = ϕi
(4.2)
aet/nik
4 Harmonische Zeitabhängigkeit
78
4.1.2 Spule
Bei der Spule ist die Spannung proportional der Stromänderung (3.2): uL (t ) = L ⋅
d i (t )
. Damit
dt
ergibt sich für die Spannung [Strom i (t ) = I ⋅ cos(ω t + ϕ i ) vorgegeben]:
d ( I ⋅ cos(ω t + ϕ i ))
= −ω L I ⋅ sin(ω t + ϕ i ) = −ω L I ⋅ cos(ω t + ϕ i − π / 2)
dt
uL (t ) = ω L I ⋅ cos(ω t + ϕ i + π / 2)
uL (t ) = L ⋅
uL (t ) = U L ⋅ cos(ω t + ϕ u ),
U L = ω L I,
ϕu = ϕi +π / 2
(4.3)
Bei der Spule eilt die Spannung dem Strom um ∆ϕ = ϕ u − ϕ i = π / 2 (90° = Viertelperiode) voraus.
Die zeitliche Verschiebung ist ∆ϕ / ω = π / (2ω ) = T / 4 . Figur 4-1 zeigt Strom- und Spannungsverlauf bei der Spule für harmonische Zeitabhängigkeit.
u, i
uL(t)
ÛL
i(t)
Î
i(t)
L
uL(t)
t
"Spannung 90° voreilend"
T/4
Figur 4-1: Strom und Spannung bei der Spule (harmonisch)
4.1.3 Kondensator
1
⋅ qC ( t )
C
Damit ergibt sich für die Spannung [Strom i (t ) = I ⋅ cos(ω t + ϕ i ) vorgegeben und uC(0) = 0]:
Beim Kondensator ist die Spannung proportional zur Kondensatorladung (3.4): uC (t ) =
z
t
1 I
I
uC (t ) = ⋅ I ⋅ cos(ω τ + ϕ i )dτ =
⋅ sin(ω t + ϕ i ) =
⋅ cos(ω t + ϕ i − π / 2)
C 0
ωC
ωC
uC (t ) = U C ⋅ cos(ω t + ϕ u ),
I
U C =
,
ωC
ϕu = ϕi −π / 2
(4.4)
Beim Kondensator ergibt sich für ∆ϕ = ϕ u − ϕ i = −π / 2 (90° = Viertelperiode). D.h. die Spannung
eilt dem Strom um 90° nach. Die zeitliche Verschiebung ist ∆ϕ / ω = −π / (2ω ) = − T / 4 . Figur 42 zeigt Strom- und Spannungsverlauf beim Kondensator für harmonische Zeitabhängigkeit.
aet/nik
4 Harmonische Zeitabhängigkeit
79
u, i
ÛC
i(t)
Î
uC(t)
i(t)
C
uC(t)
t
"Strom 90° voreilend"
T/4
Figur 4-2: Strom und Spannung beim Kondensator (harmonisch)
Die wesentlichen Resultate für Widerstand, Spule und Kondensator bei harmonischer Zeitabhängigkeit sind in der folgenden Tabelle zusammengefasst:
U
ϕu
∆ϕ = ϕ u − ϕ i
Bemerkungen
Widerstand
R ⋅ I
ϕi
0
„in Phase“
Spule
ω L ⋅ I
ϕi +π / 2
+π / 2
„Spannung voreilend“
Kondensator
1 ⋅I
ωC
ϕi −π / 2
−π / 2
„Strom voreilend“
Beachte: Die Begriffe „Phase“ und „Phasenverschiebung“ sind nur für harmonische Zeitabhängigkeit definiert. Bei zwei zeitlich verschobenen Dreiecksignalen (als Beispiel) kann keine Phasenverschiebung angegeben werden!!
aet/nik
4 Harmonische Zeitabhängigkeit
80
4.1.4 Momentanleistung
Für die drei Grundelemente Widerstand, Spule und Kondensator wird die Momentanleistung p(t)
berechnet, skizziert und diskutiert. Besondere Merkmale wie mittlere Leistung P, maximale und
minimale Leistung (pmax, pmin) werden zusätzlich untersucht.
Mit i (t ) = I ⋅ cos(ω t + ϕ i ) und u(t ) = U ⋅ cos(ω t + ϕ u ) berechnet sich:
1
p(t ) = u(t ) ⋅ i (t ) = U I ⋅ cos(ω t + ϕ u ) ⋅ cos(ω t + ϕ i ) = U I ⋅ cos(2ω t + ϕ u + ϕ i ) + cos(ϕ u − ϕ i )
2
mit
U=
U
I
, I=
2
2
und
∆ϕ = ϕ u − ϕ i
ergibt sich:
p(t ) = UI ⋅ cos(2ω t + ϕ u + ϕ i ) + cos( ∆ϕ )
(4.5)
p(t) setzt sich zusammen aus einem „Wechselanteil“ mit doppelter Frequenz und einem konstanten
Anteil. Besondere (extreme) Werte können nun leicht aus (4.5) bestimmt werden (für passive
Netzwerke liegt ∆ϕ im Bereich –π/2 ... π/2, so dass cos(∆ϕ) ≥ 0 wird):
Mittlere Leistung:
P = p(t ) = UI ⋅ cos( ∆ϕ ) = UI ⋅ cos(ϕ u − ϕ i )
(4.6)
pmax = UI ⋅ cos( ∆ϕ ) + 1 = UI ⋅ cos(ϕ u − ϕ i ) + 1
(4.7)
pmin = UI ⋅ cos( ∆ϕ ) − 1 = UI ⋅ cos(ϕ u − ϕ i ) − 1
(4.8)
Maximale Leistung:
Minimale Leistung:
Figur 4-3 zeigt einen typischen Verlauf für p(t). Zusätzlich sind zwei Formeln angegeben, die zusammen mit der Graphik von p(t) hilfreich sind.
p(t)
pmax
P=
P
t
pmin
Figur 4-3: Typischer Verlauf der Momentanleistung p(t)
b
1
⋅ pmax + pmin
2
cos( ∆ϕ ) =
g
pmax + pmin
pmax − pmin
aet/nik
4 Harmonische Zeitabhängigkeit
81
Für einen Widerstand sind Strom und Spannung in Phase (4.2) und damit werden ( ∆ϕ = 0 ):
p(t)
pmax
P = UI
pmax = 2 ⋅ UI
pmin = 0
0
t
Figur 4-4: Momentanleistung p(t) beim Widerstand (ϕi = 0)
Sowohl Spule als auch Kondensator haben eine Phasenverschiebung von 90° zwischen Strom und
Spannung. Damit wird für beide Elemente cos( ∆ϕ ) = 0 . Eingesetzt in (4.6)...(4.8) ergibt:
p(t)
pmax
P=0
pmax = UI
pmin = −UI
0
Spule
Kondensator
t
pmin
Figur 4-5: Momentanleistung p(t) bei Spule und Kondensator (ϕi = 0)
Beim Widerstand ist p(t) immer grösser als Null (Figur 4-4); bei Spule und Kondensator wechselt
das Vorzeichen von p(t) regelmässig (Figur 4-5): Für p > 0 wird das Speicherelement mit Energie
gefüllt und für p < 0 erhält man die Energie wieder aus dem Speicherelement zurück. (Die beiden
verlustlosen Elemente Spule und Kondensator bezeichnet man als reaktive Elemente). Bei allen
(passiven) RLC-Netzwerken liegt also der Verlauf von p(t) „zwischen“ den oben skizzierten Extremfällen (siehe auch Figur 4-3).
4.1.5 Gespeicherte Energie in Spule und Kondensator
Die gespeicherte Energie in einer Spule (im Magnetfeld) hängt nur vom Strom i und der Induktivität
L ab. Beim Kondensator wird die Energie im elektrischen Feld gespeichert und ist durch die
Spannung u und die Kapazität C bestimmt. Ist zu einem Zeitpunkt t der Strom durch die Spule bekannt, so kennt man auch die (momentan) gespeicherte Energie in der Spule (unabhängig von der
Vorgeschichte). Mit (3.2) und (3.6) ergibt sich für p(t) bei der Spule:
di (t )
p( t ) = L ⋅ i ( t ) ⋅
dt
Mit der Definition (3.7) für w(t) erhält man:
z
t
w(t ) = L ⋅ i (τ ) ⋅
0
1
di (τ )
dτ = ⋅ L ⋅ i 2 (t )
2
dτ
Eine analoge Herleitung kann auch für den Kondensator durchgeführt werden. Zusammengefasst
ergibt sich für die beiden reaktiven Elemente:
aet/nik
4 Harmonische Zeitabhängigkeit
82
Gespeicherte Energie in der Spule:
wL (t ) =
1
⋅ L ⋅ i 2 (t )
2
(4.9)
Gespeicherte Energie im Kondensator:
wC (t ) =
1
⋅ C ⋅ u 2 (t )
2
Beachte: Obige zwei Formeln gelten für beliebige Zeitabhängigkeit.
(4.10)
aet/nik
4 Harmonische Zeitabhängigkeit
83
4.2 Komplexe Zahlen
Da jedes Lehrbuch der Ingenieurmathematik das Rechnen mit komplexen Zahlen ausführlich behandelt, möge es hier genügen, kurz die für eine Anwendung in der Elektrotechnik wichtigen
Begriffe und Rechenregeln anzugeben. Zusätzlich wird auf den Mathematikunterricht verwiesen.
4.2.1 Definitionen, Begriffe und Darstellung
Man definiert die imaginäre Einheit (Operator) j formal als eine Zahl, deren Quadrat „-1“ ergibt:
j = −1
(4.11)
Die Einführung der imaginären Einheit führt zu einer Erweiterung des Zahlenbegriffes, und zwar zu
den komplexen Zahlen, die eine grosse Rolle in der Algebra und Analysis spielen. Für die Elektrotechnik sind die komplexen Zahlen ebenfalls von ausserordentlicher Bedeutung (harmonische
Zeitabhängigkeit mit „Zeigerrechnung“).
Die allgemeine Form der komplexen Grösse (algebraische Schreibweise) lautet:
r = a + jb
(4.12)
wobei die Formelzeichen komplexer Grössen in diesem Skript grundsätzlich unterstrichen sind.
Eine komplexe Grösse (mit Betrag r und Winkel α) besteht also aus dem Realteil
a = Re(r ) = r ⋅ cos(α )
(4.13)
b = Im(r ) = r ⋅ sin(α )
(4.14)
und dem Imaginärteil
Komplexe Grössen werden zweckmässig in der Gauss’schen Zahlenebene mit kartesischen Koordinaten dargestellt, stellen also die Summe von Real- und Imaginärteil (multipliziert mit j) dar. Alternativ ist auch die Darstellung mit Betrag und Winkel möglich (Polarkoordinaten).
jIm(r)
jIm(r)
2j
r
j
a
−2
−1
0
1
jb
2
3
− jb
−j
− 2j
r
r*
Re(r)
α
0
−α
Re(r)
r*
Figur 4-6: Kartesische Koordinaten und Polarkoordinaten der Gauss’schen Zahlenebene. Darstellung der komplexen
Zahl r und der konjugiert komplexen Zahl r*
aet/nik
4 Harmonische Zeitabhängigkeit
84
Setzt man (4.13) und (4.14) in (4.12) so erhält man die trigonometrische Darstellung einer komplexen Grösse:
r = r ⋅ cos(α ) + j ⋅ sin(α )
(4.15)
Aus Figur 4-6 ist leicht ersichtlich, dass man den Realteil durch Projektion der komplexen Zahl auf
die reelle Achse erhält; ebenso entspricht der Imaginärteil der Projektion von r auf die imaginäre
Achse (siehe auch (4.15)). Damit lässt sich auch einfach die „Rechteckform“ (kartesische Koordinaten) in die Polarform umrechnen:
α = arctan(b / a ),
a>0
α = arctan(b / a ) + π , a < 0
r = a 2 + b2
(4.16)
Mit der Eulergleichung
e jx = cos( x ) + j ⋅ sin( x )
(4.17)
ergibt sich die Exponentialform einer komplexen Grösse:
r = r ⋅ e jα = r ⋅ exp( jα ) = r α
(4.18)
Das Versorzeichen /α wird gern als abgekürzte Schreibweise für e jα verwendet. Obige Darstellung (4.18) kann auch als „Polarform“ bezeichnet werden, da direkt Betrag r und Winkel α der
komplexen Zahl ersichtlich sind. Der sog. Einheitskreis in der komplexen Zahlenebene wird durch
alle Zahlen mit r = 1 gebildet. Figur 4-7 zeigt den Einheitskreis mit ausgewählten Punkten
(komplexen Zahlen).
jIm(r)
j
−1
jsin(α)
α
0 cos(α)
ejα = cos(α) + jsin(α)
e j0
= 1
e jπ /2 = j
1
Re(r)
e - jπ /2 = − j
e jπ
−j
= −1
e - jπ = −1
Figur 4-7: Einheitskreis in der komplexen Zahlenebene
Ein Zeiger r ist eine gerichtete Grösse (gekennzeichnet durch den Unterstrich) mit Betrag r und
Winkel α. Der Winkelfaktor e jα = exp( jα ) = ∠α gibt die Richtung des Zeigers an, in die er aus
der positiven reellen Achse gedreht ist. Positive Zählrichtung für die Winkel ist der Gegenuhrzeigersinn. Die Länge des Zeigers wird allgemein durch den Betrag r bestimmt. Während beim
Betrag nur positive Werte vorkommen, ist der Winkel wieder eine gerichtete Grösse mit positiven
und negativen Werten.
aet/nik
4 Harmonische Zeitabhängigkeit
85
Neben der komplexen Grösse r = a + jb gibt es noch die konjugiert komplexe Grösse
r * = a − jb = r ⋅ e − jα = r ∠ − α
(4.19)
Gegenüber der komplexen Zahl r hat die konjugiert komplexe Zahl r* im Imaginärteil und im
Winkel ein entgegengesetztes Vorzeichen (siehe auch Figur 4-6). Geometrisch lässt sich die ( )*Operation als Spiegelung an der reellen Achse interpretieren.
Mit dem Winkelfaktor e jα = /α nach (4.18) wird die Lage des Festzeigers r („stillstehender Zeiger“) bestimmt. Mit dem Drehfaktor
e jω t = ∠ω t
(4.20)
kann man ausserdem einen bestimmten Punkt Pt mit der Winkelgeschwindigkeit ω rotieren lassen
und somit den Drehzeiger
r t = r ⋅ e jω t ⋅ e jα = r ∠(ω t + α )
(4.21)
definieren. Er hat den Betrag r und den Nullphasenwinkel α, der zur Zeit t = 0 die Lage des (Dreh-)
Zeigers bestimmt. Mit der Frequenz f = ω / (2π ) dreht er sich dabei in der Periodendauer T = 1/f =
2π/ω um 2π ( = 360°). Figur 4-8 zeigt einen Drehzeiger in der komplexen Ebene.
jIm(r)
Pt
r⋅sin(ω t + α)
0
r t = r ⋅ e j ( ω t +α )
ω
Re(r)
r⋅cos(ω t + α)
Festzeiger
r t = r ⋅ e jα ⋅ e jω t
Drehzeiger
Figur 4-8: Drehzeiger in der komplexen Ebene (Zusammenhang mit Festzeiger)
Der Drehzeiger enthält also die Zeitabhängigkeit ω t und rotiert; den zugehörigen Festzeiger erhält
man für t = 0 oder durch weglassen des Faktors e jω t . Durch Projektion auf die reelle Achse erhält
man für den Realteil des Drehzeigers
Re( r t ) = r ⋅ cos(ω t + α )
Hiermit wird der Zusammenhang zwischen einer harmonischen Zeitfunktion und einem komplexen
Drehzeiger hergestellt.
aet/nik
4 Harmonische Zeitabhängigkeit
86
4.2.2 Rechenoperationen
Für die theoretischen Zusammenhänge wird wiederum auf die Mathematik verwiesen. Für die Anwendung in der Elektrotechnik ist die Verwendung des Taschenrechners (Rechnen mit komplexen
Grössen ) von grosser Bedeutung. Umwandlungen in verschiedene Formate und alle Rechenoperationen werden vorausgesetzt. Es ist unumgänglich, dass die Bedienung des Taschenrechners kein
Problem darstellt.
Addition und Subtraktion
Man benutzt zweckmässig die Rechteckform nach (4.12). Mit r 1 = a1 + jb1 und r 2 = a2 + jb2 erhält
man für die Summe
r S = r 1 + r 2 = (a1 + a2 ) + j (b1 + b2 )
und die Differenz
r D = r 1 − r 2 = (a1 − a2 ) + j (b1 − b2 )
Multiplikation und Division
Jetzt benutzt man zweckmässig die Polarform nach (4.18). Mit r 1 = r1 ∠α 1 und r 2 = r2 ∠α 2 erhält
man für das Produkt
r P = r 1 ⋅ r 2 = r1r2 ∠(α 1 + α 2 )
und den Quotienten
r Q = r 1 / r 2 = r1 / r2 ∠(α 1 − α 2 )
aet/nik
4 Harmonische Zeitabhängigkeit
87
4.3 Zeiger und harmonische Zeitabhängigkeit
Mit Hilfe des (komplexen) Drehzeigers wird die harmonische Zeitabhängigkeit in die komplexe
Ebene transformiert. Man wechselt vom umständlich zu handhabenden Zeitbereich (Ableitungen
und Integrale) in einen Zeigerbereich über, der mit der komplexen Rechnung einfacher zu berechnen ist. Die komplexe Rechnung wird angewendet auf Strom, Spannung, Leistung und auch auf die
Netzwerkelemente Widerstand, Spule und Kondensator.
4.3.1 Komplexer Drehzeiger
Mit dem Drehfaktor e jω t kann man einen Zeiger mit der Winkelgeschwindigkeit ω rotieren lassen
(siehe (4.20) und (4.21)). Dieser sog. komplexe Drehzeiger wird durch Projektion auf die reelle
Achse mit der harmonischen Zeitabhängigkeit verknüpft. Der Zusammenhang wird am Beispiel der
harmonischen Spannung gezeigt:
Mit dem Drehzeiger:
ergibt sich für den Realteil:
u(t ) = U ⋅ e j (ω t +ϕ u ) = U ∠ (ϕ u + ω t )
Re[u(t )] = U ⋅ cos(ω t + ϕ u ) = u(t )
(4.22)
Zu jeder harmonischen Zeitfunktion kann also ein entsprechender komplexer Drehzeiger nach
(4.22) gebildet werden. Dabei erhält der Drehzeiger als Betrag den Spitzenwert der Zeitfunktion
und als Winkel (Versor) das Argument der cos-Funktion. Die Drehzeiger nach obiger Definition
(unterstrichene Kleinbuchstaben für zeitabhängige komplexe Grössen) werden sehr selten gebraucht; von grosser Bedeutung hingegen ist der komplexe Festzeiger (oder einfach Zeiger).
4.3.2 Komplexer Festzeiger (Zeiger)
Die konstante Drehung des Drehzeigers mit der Winkelgeschwindigkeit ω benötigt man nur zur
(seltenen) Bestimmung des Momentanwertes; für die meisten Betrachtungen verzichtet man auf
den Drehfaktor e jω t . Wenn man diesen Drehfaktor eliminiert, bleibt ein Festzeiger, dessen Länge
immer noch dem Spitzenwert der Zeitfunktion entspricht. In der Elektrotechnik werden üblicherweise aber die Effektivwerte für Ströme und Spannungen verwendet (Vorteile bei der Leistungsberechnung). Also wird jetzt die Zeigerlänge gleich dem Effektivwert gesetzt (und nicht dem Spitzenwert). Einer beliebigen (harmonischen) Zeitfunktion x(t) entspricht dann die komplexe Grösse X.
Der Übergang vom Zeitbereich in den „Frequenzbereich“ (komplexe Ebene, Bildbereich, Operatorbereich) und zurück, wird im folgenden Kapitel eindeutig definiert. Klare „Schnittstellen“ und
Konventionen sind die Voraussetzungen für den Umgang mit komplexen Strömen, Spannungen und
Impedanzen.
4.3.3 Harmonische Zeitfunktion und Zeiger
Der Übergang von einer beliebigen (harmonischen) Zeitfunktion x(t) auf die komplexe Grösse X
(Zeiger) wird kurz skizziert:
Die Zeitfunktion
weist den Effektivwert
auf.
x (t ) = X ⋅ cos(ω t + ϕ x )
X
X = X eff =
2
aet/nik
4 Harmonische Zeitabhängigkeit
88
Damit schreibt man für den komplexen Zeiger
X
X=
⋅ e jϕ x = X ⋅ e jϕ x = X ∠ ϕ x
2
Der Übergang von der Zeitebene in die komplexe Ebene (Frequenzebene) wird mit dem „Knochensymbol“ dargestellt (am Beispiel der Spannung):
Vorwärtstransformation:
u( t )
U
(4.23)
u( t )
(4.24)
Rückwärtstransformation:
U
Der (ausführliche) mathematische Zusammenhang zwischen Zeitbereich und komplexer Ebene
lautet (am Beispiel der Spannung):
c
h
c
h
c
h
u(t ) = 2 ⋅ Re U ⋅ e jω t = 2 ⋅ Re U ⋅ e jϕ u ⋅ e jω t = 2 ⋅ Re U ⋅ e j (ω t +ϕ u ) = U ⋅ cos(ω t + ϕ u )
mit Re( z ) =
d
1
*
z+z
2
u( t ) =
i
(4.25)
kann (4.25) auch umgeformt werden auf:
d
i
c
h
2
2
*
⋅ U ⋅ e jω t + U ⋅ e − jω t =
⋅ U ⋅ e j (ω t +ϕ u ) + U ⋅ e − j (ω t +ϕ u ) = U ⋅ cos(ω t + ϕ u )
(4.26)
2
2
(Obige Zusammenhänge gelten sinngemäss für beliebige, harmonisch zeitabhängige Grössen.)
Für beide „Richtungen“ (Zeitbereich ↔ Zeiger) hält man sich an die folgenden Verfahren:
Zeitbereich → Zeiger:
1.
Zeitfunktion in cos-Form schreiben, Spitzenwert X und Nullphasenwinkel ϕ x ablesen:
x (t ) = X ⋅ cos(ω t + ϕ x )
Þ
X = ? ϕ x = ?
2.
Effektivwert bestimmen durch Division mit
3.
Komplexen Zeiger X bilden mit:
2:
X = X
2
X = X ⋅ e jϕ x = X ∠ ϕ x
Zeiger → Zeitbereich:
1.
Komplexe Zahl in Polarform darstellen, Betrag X und Winkel ϕx ablesen:
X = X ∠ϕ x
Þ
X = ? ϕx = ?
X = 2 ⋅ X
2.
Spitzenwert bestimmen durch Multiplikation mit
2:
3.
Zeitfunktion x(t) bilden mit:
x (t ) = X ⋅ cos(ω t + ϕ x )
aet/nik
4 Harmonische Zeitabhängigkeit
89
4.4 Grundgesetze im Operatorbereich (Frequenzbereich)
Die Grundgesetze bei harmonischer Zeitabhängigkeit im Zeitbereich ((4.2), (4.3) und (4.4)) werden
nun in den Zeigerbereich übersetzt. Der harmonische Strom wird „übersetzt“ mit:
i (t ) = I ⋅ cos(ω t + ϕ i )
I = I ∠ϕ i
Eine Phasenverschiebung von π/2 entspricht einer Multiplikation mit j. Ebenso führt eine Multiplikation mit –j (oder Division durch j) zu einer Phasenverschiebung von –π/2.
Zur Erinnerung:
Bei der Spule ist die Spannung dem Strom um π/2 voraus; beim Kondensator eilt die Spannung dem
Strom um π/2 nach (siehe (4.3) und (4.4)).
4.4.1 Widerstand
Strom und Spannung sind „in Phase“. Für die komplexen Zeiger bedeutet dies:
U R = R⋅ I
(4.27)
4.4.2 Spule
Mit (4.3) ergibt sich für die Spule im Zeigerbereich:
U L = jω L ⋅ I
(4.28)
4.4.3 Kondensator
Mit (4.4) erhält man für den Kondensator im Zeigerbereich:
UC =
1
⋅I
jω C
(4.29)
Obige Gesetze weisen eine wichtige Gemeinsamkeit auf (im Zeigerbereich): Die Spannung berechnet sich als das Produkt von Strom und einem „komplexen Widerstand“. Je nach Element (R, L oder
C) ergibt sich ein spezieller (typischer) „komplexer Widerstand“. Diesen „komplexen Widerstand“
bezeichnet man als Impedanz (Scheinwiderstand) und führt dafür das Formelzeichen Z ein. Im
Zeigerbereich (komplexer Ebene) ergibt sich also für die Beziehung zwischen Strom und Spannung
eine Gesetzmässigkeit, die an das ohmsche Gesetz erinnert ( U = R ⋅ I in der Gleichstromlehre).
Besteht ein 1-Tor aus mehreren Elementen, so gibt man einfach die komplexe Impedanz der
Ersatzschaltung an. Dabei gelten die bekannten Regeln aus der Gleichstromlehre über Serie- und
Parallelschaltung von Netzwerkelementen, mit der zusätzlichen Auflage, dass jetzt alle Berechnungen mit komplexen Grössen durchgeführt werden.
Figur 4-9 zeigt eine beliebige komplexe Impedanz (neues Symbol) zusammen mit dem
„ohmschen Gesetz“ im Zeigerbereich (nur für harmonische Zeitabhängigkeit).
aet/nik
4 Harmonische Zeitabhängigkeit
I
90
U
U = Z⋅I
(4.30)
Z
Figur 4-9: „Ohmsches Gesetz“ im Zeigerbereich
(für harmonische Zeitabhängigkeit)
Für die drei Basiselemente Widerstand, Spule und Kondensator sind in der Tabelle 4-1 die Grundgesetze zusammengestellt. Die zweite Spalte enthält die Gesetze im Zeitbereich (für beliebige
Zeitabhängigkeit), die dritte und vierte Spalte gelten für harmonische Zeitabhängigkeit; wobei die
vierte Spalte die Zusammenhänge im Frequenzbereich (Zeigerbereich) zeigt.
Tabelle 4-1: Grundgesetze für Widerstand, Spule und Kondensator
allg. Zeitabhängigkeit
R
U R = R ⋅ I,
uR = R ⋅ i
L
uL = L ⋅
z
di
dt
U L = ω L ⋅ I ,
1
uC =
idτ
C0
ϕu = ϕi
π
2
π
ϕu = ϕi −
2
ϕu = ϕi +
1 U C =
⋅I,
ωC
t
C
harmon. Zeitabhängigkeit
Zeigerbereich
U R = R⋅I
U L = jω L ⋅ I
UC =
1
⋅I
jω C
Betrachtet man die Tabelle 4-1 etwas genauer, so stellt man folgende Zusammenhänge zwischen
Zeit- und Operatorbereich fest:
u( t )
U
i (t )
I
d
dt
jω
z
1
jω
t
dτ
0
Einer Ableitung im Zeitbereich entspricht eine Multiplikation mit jω im Frequenzbereich. Bei einer Integration im
Zeitbereich wird im Frequenzbereich durch jω dividiert.
Später wird die Schreibweise s = jω verwendet; s wird
dann als verallgemeinerte Frequenzvariable bezeichnet und
bekommt in der sog. Laplace-Ebene (Laplacetransformation) eine grosse Bedeutung.
Mit (4.30) definiert man die Begriffe Impedanz und Admittanz eines 1-Tores wie folgt:
Z=
mit
U
I
Z:
Impedanz (Scheinwiderstand)
Y:
Admittanz (Scheinleitwert)
Y=
I
1
=
U Z
(4.31)
Die deutschen Bezeichnungen „Scheinwiderstand“ und „Scheinleitwert“ werden praktisch nicht benutzt. Zusätzlich kennzeichnet man Real- und Imaginärteil von Z und Y mit eigenen Symbolen und
Namen:
aet/nik
4 Harmonische Zeitabhängigkeit
Z = R + jX
mit:
R:
X:
G:
B:
oder:
91
Y = G + jB
(4.32)
Widerstand
Reaktanz (Blindwiderstand)
Leitwert
Suszeptanz
b g= R
b g= X
b g=G
b g= B
Re Z
Im Z
Re Y
Im Y
[ Der Realteil der Impedanz heisst Widerstand ]
[ Der Imaginärteil der Impedanz heisst Reaktanz ]
[ Der Realteil der Admittanz heisst Leitwert ]
[ Der Imaginärteil der Admittanz heisst Suszeptanz ]
Für R, L und C sind die Impedanzen und Admittanzen in der Tabelle 4-2 zusammengestellt. Besteht
ein Netzwerk aus einer Kombination dieser Elemente, so berechnet man die Impedanz des Ersatznetzwerkes „wie gewohnt“, nur finden alle Berechnungen in der „komplexen Ebene“ statt.
Tabelle 4-2: Impedanzen und Admittanzen der Grundelemente
Element
R
L
C
Impedanz
(komplex)
ZR = R
Z L = jω L
ZC =
1
jω C
Admittanz
(komplex)
Impedanz
(s-Ebene)
Admittanz
(s-Ebene)
1
R
Z R ( s) = R
YR ( s) =
1
R
1
jω L
Z L ( s) = sL
YL ( s) =
1
sL
YR =
YL =
Y C = jω C
Z C ( s) =
1
sC
YC ( s) = sC
{Aufg4-14 ... Aufg4-26}
4.4.4 Wirkleistung, Blindleistung und Scheinleistung
(4.30) erinnert stark an das ohmsche Gesetz bei Gleichstrom, obwohl die Gleichung für harmonische Zeitabhängigkeit gilt. Dank der Verwendung des Zeigerkonzepts (komplexe Zahlen) lässt
sich der Zusammenhang zwischen Strom und Spannung „so einfach schreiben“. Im Kapitel 4.1.4
wurden die Gleichungen für p(t) und P hergeleitet (harmonische Zeitabhängigkeit). Welche
„Leistungsdefinitionen“ sind nun mit den Zeigern (komplexe Ebene) sinnvoll und nützlich?
Mit U = U ∠ϕ u und I = I ∠ϕ i definiert man die komplexe Scheinleistung wie folgt:
*
b
S = U ⋅ I = UI ∠ ϕ u − ϕ i
g
(4.33)
Durch Vergleich von (4.33) und (4.6) ist leicht ersichtlich, dass der Realteil von S gerade der
mittleren Leistung P entspricht. Daher sind die weiteren Konventionen und Definitionen üblich:
aet/nik
4 Harmonische Zeitabhängigkeit
b
92
b
g
S = P + jQ = UI ⋅ cos ϕ u − ϕ i + jUI ⋅ sin ϕ u − ϕ i
mit:
oder:
S:
P:
Q:
g
(4.34)
komplexe Scheinleistung in VA (Voltampere)
Wirkleistung in W (Watt)
Blindleistung in VAr (Voltampere-reaktiv)
bg
bg
Re S = P
Im S = Q
[ Der Realteil der Scheinleistung ist die Wirkleistung ]
[ Der Imaginärteil der Scheinleistung ist die Blindleistung ]
Trennt man (4.34) für Real- und Imaginärteil, so ergibt sich:
bg
b
g
P = Re S = UI ⋅ cos ϕ u − ϕ i ,
bg
b
Q = Im S = UI ⋅ sin ϕ u − ϕ i
g
Dem Ingenieur stehen jetzt drei Grössen (S, P, Q) zur Verfügung, die alle den Wortteil „Leistung“
enthalten. Dass die Unterscheidung der drei „Leistungen“ sehr wichtig ist, drückt sich auch darin
aus, dass jede „Leistung“ eine eigene Einheit erhält. Im Folgenden werden die wichtigsten Eigenschaften von Wirk-, Blind- und Scheinleistung in Stichworten zusammengestellt:
Wirkleistung P:
- Mittelwert von p(t) [mittlere Leistung]
- Wirkleistung (Wärme, Kraft, Energie, usw.)
- kann in beliebige Formen gewandelt werden (mechanisch, chemisch, usw.)
- bleibt erhalten (Umwandlung)
- liegt in der komplexen Ebene auf der reellen Achse [ P = Re(S) ]
- wird vom Strom erzeugt, der mit der Spannung „in Phase“ ist
Blindleistung Q:
- keine physikalische Bedeutung
- kann erzeugt (im Kondensator) und vernichtet (in der Spule) werden
- Extremwert der Momentanleistung in L oder C (reaktive Elemente)
- erzeugt keine Wärme und kann nicht umgewandelt werden
- „Kunstgrösse“ der Elektroingenieure
- liegt in der komplexen Ebene auf der imaginären Achse [ Q = Im(S) ]
- wird vom Strom erzeugt, der senkrecht zur Spannung steht (±90°)
Scheinleistung S:
- komplexe Zahl mit P als Realteil und Q als Imaginärteil
- Betrag entspricht dem Produkt aus U und I ( S = S = UI )
- Winkel entspricht der Phasenverschiebung zwischen I und U
( ∠S = ϕ u − ϕ i )
Spricht man einfach nur von Leistung, so ist immer die Wirkleistung P oder die Momentanleistung
p(t) gemeint (physikalisch interpretierbar)! Nur für diese beiden Leistungsbegriffe verwendet man
die Einheit „Watt“.
Die Definitionen (4.33) und (4.34) werden jetzt auf komplexe Impedanzen angewendet, so dass bei
gegebener Spannung, oder gegebenem Strom die „Leistungen“ berechnet werden können. Figur 410 zeigt eine allgemeine Impedanz/Admittanz mit Zählpfeilen:
aet/nik
I
4 Harmonische Zeitabhängigkeit
93
“Ohmsches Gesetz“
1
U = Z⋅I = ⋅I
Y
1
I = Y ⋅U = ⋅U
Z
U
Z = 1/Y
Figur 4-10: Impedanz/Admittanz mit
Zählpfeilen für Strom und Spannung
Weiter werden die folgenden mathematischen Zusammenhänge (komplexe Zahlen) verwendet:
2
A ⋅ A* = A = A 2
bg
d i
Im A* = − Im A
und
Sind Strom und Impedanz gegeben, so erhält man mit (4.33) und (4.30):
*
2
*
S = U ⋅ I = Z ⋅I ⋅I = I ⋅Z = I2 ⋅Z
bg
mit P = Re S
bg
und Q = Im S
(4.35)
ergibt sich:
bg
P = I 2 ⋅ Re Z ,
bg
Q = I 2 ⋅ Im Z
(4.36)
Sind Spannung und Admittanz gegeben, so erhält man mit (4.33) und (4.30)
b g = U ⋅U
*
S = U ⋅ I = U ⋅ U ⋅Y
bg
mit P = Re S
bg
und Q = Im S
*
*
*
*
⋅Y = U 2 ⋅Y =
U2
*
Z
(4.37)
ergibt sich:
bg
P = U 2 ⋅ Re Y ,
bg
Q = −U 2 ⋅ Im Y
(4.38)
Einige Formeln weisen Ähnlichkeiten mit Formeln der Gleichstromlehre auf; hier sei aber auf einen
U2
ist falsch für die Leistungsberechnung!
häufigen Fehler hingewiesen: Der Ausdruck P =
Re Z
Zeigen Sie mit (4.38), wie die richtige Formel heisst und warum der erwähnte Ausdruck falsch ist.
bg
Eine weitere Definition ist der sog. Leistungsfaktor (Wirkfaktor, cosϕ), der sich berechnet zu:
b
g
b g
bg
c b gh
cos ϕ u − ϕ i = cos ∆ϕ = cos ϕ = cos arg S =
P
S
(4.39)
aet/nik
4 Harmonische Zeitabhängigkeit
94
Wird die (komplexe) Scheinleistung S = P+jQ in der komplexen Ebene dargestellt, so bezeichnet
man dies als sog. Leistungsdreieck. Figur 4-11 zeigt ein Leistungsdreieck mit eingezeichnetem
Winkel ∆ϕ = ϕ u − ϕ i = arg S
bg
Im
S = P + jQ
S
jQ
(induktiv)
∆ϕ
Re
P
S=
P 2 + Q2
b g
cos ∆ϕ =
(Betrag)
P
S
(kapazitiv)
Figur 4-11: Leistungsdreieck und cosϕ
Je nach Vorzeichen von P und Q unterscheidet man verschiedene Bereiche in der komplexen Ebene
(4 Quadranten),(Eintore mit VZS bepfeilt):
Q > 0:
Q < 0:
P > 0:
P < 0:
induktiv (obere Halbebene)
kapazitiv (untere Halbebene)
Verbraucher (passiv) (rechte Halbebene)
Erzeuger (aktiv) (linke Halbebene)
Q = 0: (rein) ohm’sch (reelle Achse)
P = 0: (rein) reaktiv (imaginäre Achse)
In Figur 4-11 würde man also von einem „induktiven Verbraucher“ sprechen. Bei elektrischen Antrieben spricht man vom sog. 4-Quadrantenbetrieb und meint damit, dass die Maschine, je nach
Betriebszustand (Generator/Motor), in jedem der vier Quadranten betrieben werden kann. In welchem Quadranten liegt z.B. S für einen kapazitiven Erzeuger (Generator)?
{Aufg4-27 ... Aufg4-36}
4.4.5 Begriff der „Übertragungsfunktion“
Eine „richtige/saubere“ Definition der Übertragungsfunktion kann eigentlich erst durchgeführt
werden, wenn die Laplace-Transformation zusammen mit dem Bildbereich (s-Ebene) eingeführt
worden ist. Wir führen nun die Übertragungsfunktion trotzdem ein, später wird dann der Begriff
etwas erweitert.
Bis jetzt wurde ein allgemeines RLC-Netzwerk durch die Differentialgleichung (DGL) beschrieben. Bei harmonischer Zeitabhängigkeit können Ströme und Spannungen auch mit Zeigern
dargestellt werden (komplexe Ebene). Figur 4-12 zeigt die beiden möglichen Systembeschreibungen
am einfachen Beispiel des RC-Gliedes.
R
u1(t)
R
C
bg bg bg
RC ⋅ u2 t + u2 t = u1 t
u2(t)
U1
U 2 = U1 ⋅
C
U2
1
1 + jω RC
Figur 4-12: Beschreibung des RC-Gliedes mit DGL (Zeitbereich) und mit Zeigern (komplexe Ebene)
aet/nik
4 Harmonische Zeitabhängigkeit
95
Die Beschreibung des RC-Gliedes mit der DGL gilt für beliebige Zeitabhängigkeit, die Beschreibung mit Zeigern ist zunächst eingeschränkt auf harmonische Zeitabhängigkeit; später wird auch
diese Beschreibung für beliebige Zeitabhängigkeit „gültig gemacht“ (s statt jω). Bei der „Zeigerrechnung“ kann nach dem Verhältnis U2/U1 aufgelöst werden. Für das RC-Glied aus Figur 4-12
U
1
ergibt sich: 2 =
. Dieses Verhältnis bezeichnen wir als „Übertragungsfunktion“ des
U 1 1 + jω RC
RC-Gliedes [Die Bezeichnung „Übertragungsfunktion“ ist erst korrekt, wenn man für s = jω setzt].
Lässt man jω im Ausdruck stehen, so ist die „Übertragungsfunktion“ eine komplexwertige Funktion
(mit Betrag und Phase).
Für beliebige 1- und 2-Tore werden solche Übertragungsfunktionen definiert. Unsere Definitionen der Impedanz und Admittanz (4.31) sind schon (einheitenbehaftete) „Übertragungsfunktionen“. Figur 4-13 zeigt ein allgemeines 2-Tor und ein paar mögliche „Übertragungsfunktionen“.
Für eine systematische Behandlung der 2-Tore und ihrer Übertragungsfunktionen ist auf das Fach
„Elektronik“ verwiesen.
2-Tor
I1 1
2
U1
1'
I2
Spannungsübertragung (vorwärts):
U2
2'
U2
I1
U
T 21u = 2
U1
I
T 12i = 1
I2
Übertragungsimpedanz (vorwärts): Z 21 =
Stromübertragung (rückwärts):
Figur 4-13: 2-Tor mit ausgewählten Übertragungsfunktionen
Bei der Angabe einer Übertragungsfunktion (eines 2-Tores) muss die Betriebsrichtung beachtet
werden. Es ist üblicherweise Konvention, dass die Ursache (Quelle) im Nenner, und die Wirkung
im Zähler steht. Schreibt man z.B. H = U2/U1, so ist die Quelle beim Tor 1, und gemessen
(Wirkung) wird am Tor 2. Als Beispiel wird der einfache Spannungsteiler mit zwei Widerständen
betrachtet (unbelastet):
U2
R2
R1
„Vorwärts“:
=
,
U 1 R1 + R2
aber
R2
U1
U2
U1
„Rückwärts“:
=1
U2
Figur 4-14: Übertragungsfunktionen beim Spannungsteiler (Betriebsrichtung beachten!)
{Aufg4-37 ... Aufg4-38}
aet/nik
4 Harmonische Zeitabhängigkeit
96
4.5 Darstellung im Frequenzbereich
Allgemeine „Übertragungsfunktionen“ (Impedanz, Admittanz, Spannungsübertragung, Stromübertragung, Transimpedanz. usw.) sind komplexwertige Funktionen in Abhängigkeit der Kreisfrequenz ω. Zur graphischen Darstellung einer komplexwertigen Funktion stehen mehrere Möglichkeiten zur Verfügung, dabei schreibt man die komplexwertige Funktion F(ω) in der Rechteckform
oder in der Polarform:
A(ω): Realteil in Funktion von ω
jϕ bω g
B(ω): Imaginärteil in Funktion von ω
F ω = A ω + jB ω = P ω ⋅ e
P(ω): Betrag in Funktion von ω
ϕ(ω): Phase in Funktion von ω
bg bg bg bg
Einige Darstellungsvarianten werden kurz vorgestellt und kommentiert:
A(ω) und B(ω) in je einer Figur:
seltene Darstellung, nur bei Impedanzen und
Admittanzen in der HF-Technik.
P(ω) und ϕ(ω) in je einer Figur:
sehr häufig verwendet, wird als Frequenzgang
bezeichnet. P(ω) heisst Amplitudengang,
ϕ(ω) heisst Phasengang.
F(ω) als Kurve in der kompl. Ebene:
sehr häufig verwendet, wird als Ortskurve bezeichnet.
„Gleichzeitige Darstellung“ von P(ω) und ϕ(ω) in einer
Figur. [parametrische Darstellung der kompl. Funktion
mit ω als Parameter]
Moderne Messgeräte (Frequenzbereichsmessungen werden von 0.01 Hz bis 100 GHz durchgeführt)
stellen alle diese Darstellungsarten (und viele mehr) zur Verfügung. Im Folgenden werden Ortskurve und Frequenzgang kurz eingeführt und an ein paar typischen Beispielen demonstriert.
4.5.1 Ortskurve
Bei der Ortskurve wird die Funktion F(ω) direkt in die komplexe Ebene gezeichnet. Dabei lässt man
für ω den Bereich 0 ≤ ω ≤ ∞ durchlaufen. Das Verfahren und einige nützliche Regeln werden an
Beispielen vorgeführt.
Bsp4-1: Von der Serieschaltung von R und L ist die Ortskurve der Impedanz zu skizzieren. Die Impedanzfunktion von der Serieschaltung lautet Z ω = R + jω L . Durch Überlegen sieht man leicht,
dass für 0 ≤ ω ≤ ∞ eine Halbgerade parallel zur imaginären Achse durchlaufen wird. Für ω=0
startet die Gerade auf der reellen Achse bei Z(ω=0) = R. Als „markanten Punkt“ kann der Punkt
eingetragen werden, wo Re(Z) = Im(Z) ist. Angewendet auf das Beispiel ergibt sich:
R
ω L = R Þ ω1 = .
L
ω L
π
Die Phase bei dieser Frequenz ergibt: arg Z = arctan 1
= arctan 1 = . Berechnen Sie den
R
4
Betrag der Impedanzfunktion bei dieser Frequenz. Figur 4-15 zeigt diese Ortskurve mit dem eingetragenen Wert ω1.
bg
bg
FG
H
IJ
K
bg
aet/nik
4 Harmonische Zeitabhängigkeit
97
ω→ ∞
Im(Z)
Z
R
L
ω = ω1 = R L
ωL=R
ω
Z(
)
Z(ω)
ω
π 4
ω=0
Re(Z)
R
Figur 4-15: Ortskurve der Impedanz Z der Serieschaltung von R und L
Bsp4-2: Von der Serieschaltung von R und L ist die Ortskurve der Admittanz zu skizzieren. Mit
1
1
− jω L
R − jω L
R
Y= =
= 2
= 2
+ 2
können Real- und Imaginärteil von Y
2
2
2
Z R + jω L R + ω L
R + ωL
R + ωL
b g
b g
b g
getrennt werden. Um die Ortskurve zu zeichnen ist obige Darstellung aber nicht optimal. Die Operation Y = 1 Z bezeichnet man als Inversion (am Einheitskreis). In der Mathematik lernt man die
folgenden Regeln zur Inversion (ohne Beweis, → siehe Mathematikunterricht):
Inversion von
Resultat
Halbgerade durch Nullpunkt
Halbgerade durch Nullpunkt
Halbgerade nicht durch Nullpunkt
Halbkreis durch Nullpunkt
Halbkreis durch Nullpunkt
Halbgerade nicht durch Nullpunkt
Halbkreis nicht durch Nullpunkt
Halbkreis nicht durch Nullpunkt
Kreis durch Nullpunkt
Gerade nicht durch Nullpunkt
Kreis nicht durch Nullpunkt
Kreis nicht durch Nullpunkt
[ Die Inversion ist eine konforme Abbildung, die winkeltreu und auch kreistreu ist ]
Mit obigen Regeln und der Inversion einiger ausgewählter Punkte kann die resultierende Kurve
meistens leicht überlegt/konstruiert werden. Im Beispiel muss also jetzt die Halbgerade in Figur 415 invertiert werden. Diese Halbgerade (nicht durch Null) ergibt einen Halbkreis (durch Null). Da
die Halbgerade im ersten Quadrant liegt ( 0 ≤ ϕ ≤ π 2 ), kommt die invertierte Kurve (Halbkreis) in
den vierten Quadranten ( − π 2 ≤ ϕ ≤ 0 ) zu liegen. Ausgewählte Punkte für die Inversion sind z.B.:
ω = 0:
Z = R Þ Y =1 R
ω = ∞:
Z=∞ Þ Y=0
Damit ist jetzt klar, dass der Halbkreis für ω = 0 bei Y = 1/R (reelle Achse) beginnt, durch den
vierten Quadranten läuft, und für ω = ∞ bei Y = 0 endet (im Nullpunkt). Figur 4-16 zeigt die Ortskurve für Y(ω).
aet/nik
4 Harmonische Zeitabhängigkeit
98
Im(Y)
Y
R
1/R
0
ω=∞
−π 4
ω=0
Y(ω)
Re(Y)
L
Y(ω)
ω
ω = ω1 = R L
Figur 4-16: Ortskurve der Admittanz Y der Serieschaltung von R und L
Mit den beiden skizzierten Impedanz- und Admittanzverläufen (Figur 4-15 und Figur 4-16) sind
schon zwei typische Ortskurven für Netzwerke erster Ordnung (1 Speicherelement) dargestellt. Alle
Netzwerke erster Ordnung weisen Geraden oder Kreise für ihre Ortskurven auf. Für die Grundschaltungen aus einem Widerstand und einem reaktiven Element sind in der folgenden Figur die
Ortskurven skizziert.
Figur 4-17: Ortskurven der Impedanz und Admittanz von Netzwerken erster Ordnung
aet/nik
4 Harmonische Zeitabhängigkeit
99
Aufg4-39: Tragen Sie in den Ortskurven von Figur 4-17 die markanten Punkte (ω = 0, ω = ∞, usw.),
die Angabe der Ebene (Z oder Y) und die Richtung für steigendes ω ein. Welche Netzwerke in
Figur 4-17 sind zueinander dual? Was bedeutet dies für die Ortskurven?
Aufg4-40: Wie sehen die Ortskurven für die Parallelschaltung und Serieschaltung von Spule und
Kondensator aus?
Für Netzwerke 2. und höherer Ordnung können auch andere Ortskurven als Kreise und Geraden
entstehen. Für die beiden wichtigen Fälle Serieschwingkreis und Parallelschwingkreis (mit Verlusten) ist dies aber noch nicht der Fall (Zufall?). Figur 4-18 zeigt die Ortskurven für Serie- und
Parallelschwingkreis.
Figur 4-18: Ortskurven für Serieschwingkreis und Parallelschwingkreis (mit Verlusten)
Aufg4-41: Vervollständigen Sie die Ortskurven in Figur 4-18 (Bezeichnungen, markante Punkte,
Drehrichtung, usw.).
{Aufg4-42 ... Aufg4-44}
aet/nik
4 Harmonische Zeitabhängigkeit
100
4.5.2 Frequenzgang (Bodediagramm)
Beim Frequenzgang werden Betrag und Phase von F(ω) in separate Figuren gezeichnet, die einzelnen Figuren bezeichnet man als Amplitudengang (Amplitude) und Phasengang (Phase). Die Polardarstellung von F(ω) ist daher gut geeignet für die Frequenzgangdarstellung. Meistens wird der
Betrag (der Übertragungsfunktion) in einem logarithmischen Verhältnismass, dem Dezibel (dB)
dargestellt. Für die ausführliche Definition dieses Masses (und weiterer verwandter Grössen) wird
auf das Fach „Elektronik“ verwiesen. Wir verwenden das „dB“ als Verhältnisgrösse für Leistungen,
Spannungen und Ströme (Verhältnisse von Beträgen!). Folgende Definitionen sind üblich:
FG P IJ
HPK
b
= 10 ⋅ log P2 P1
2
„Leistungsverstärkung in dB“:
1
FG U IJ
HU K
b
= 20 ⋅ log U 2 U 1
2
„Spannungsverstärkung in dB“:
1
FG I IJ
HI K
1
(4.40)
g
(4.41)
dB
b
= 20 ⋅ log I 2 I1
2
„Stromverstärkung in dB“:
g
dB
g
dB
(4.42)
Beachte:
b
Die Definitionen U 2 U 1
g
dB
b
und I 2 I1
g
dB
sind nur „sinnvoll“, wenn beide
Spannungen oder Ströme am gleichen Widerstand gemessen werden.
Der Umgang mit der „dB-Skala“ gehört zum Grundwissen des Elektroingenieurs; es ist auch nützlich, ein paar markante Werte dieser Skala auswendig zu wissen. Die folgende Tabelle zeigt einige
dB-Werte und die zugehörigen Leistungs- und Spannungsverhältnisse.
Tabelle 4-3: „dB-Skala“ mit typischen Werten
Wert in dB
Leistungsverhältnis
P2/P1
Spannungsverhältnis
U2/U1 (ident.Widerstände)
40
20
13
10
6
3
1
0
-1
-3
-6
-10
-13
-20
-40
10’000
100
20
10
4
2
1.26
1
0.794
0.5
0.25
0.1
0.05
0.01
0.0001
100
10
4.47
3.16
2
1.414
1.122
1
0.891
0.707
0.500
0.316
0.224
0.10
0.01
aet/nik
4 Harmonische Zeitabhängigkeit
101
Die Frequenzachse (f oder ω) wird entweder linear oder logarithmisch dargestellt. Je nach Anwendungsgebiet und „Messobjekt“ wird die eine oder die andere Methode favorisiert. Im Folgenden
sind die wichtigsten Eigenschaften einer linearen oder logarithmischen Frequenzachse zusammengestellt.
Darstellung
Lineare
ω-Achse
Logarithmische
ω-Achse:
Bodediagramm
Vorteile
Nachteile
Anwendung in der Praxis
- „bessere Auflösung“ bei
Schmalbandsystemen und
steilflankigen Netzwerken
- lin. Phasengang „direkt“
ersichtlich
- grosser Frequenzbereich auf
einen Blick
- asymptotisches Verhalten gut
erkennbar
- einprägsame Bilder für
Elementarglieder
- nicht geeignet bei
Breitbandsystemen
- asymptotisches Verhalten
nicht sichtbar
- Nachrichtentechnik bei
Schmalbandsystemen
- steilflankige Filter
- Regelungstechnik (sehr
- nicht geeignet bei
wichtig!)
Schmalbandsystemen und
- Nachrichtentechnik bei
steilflankigen Filtern
breitbandigen Systemen
- lin. Phasengang nicht direkt
sichtbar (Verzerrungsfreiheit) ( > 1 Dekade )
In den Beispielen wird jetzt nur die logarithmische Frequenzachse verwendet, da das sog. Bodediagramm in vielen Fachgebieten verwendet wird. Softwarepakete wie z.B. „Matlab“ stellen Befehle zur Verfügung, die sowohl die Ortskurve als auch das Bodediagramm mit einem einfachen
Funktionsaufruf „direkt graphisch“ darstellen.
aet/nik
4 Harmonische Zeitabhängigkeit
102
Bsp4-3: Vom skizzierten RC-Glied ist die Übertragungsfunktion H = U 2 U 1 als Bodediagramm
darzustellen.
R
U1
C
H = U 2 U1 =
U2
1
1
=
,
1 + jω RC 1 + jω T
mit T = RC
Nun berechnet man Betrag und Phase (von H) und erhält:
1
1
H= H =
, oder H 2 =
,
ϕ H = ∠ H = − arctan ωT
2
2
ω
1
+
T
1 + ωT
b g
b g
b g
mit H = b H g = bU U g ergibt sich für den Amplitudengang:
F 1 I
H = 20 ⋅ logG
GH 1 + bωT g JJK = −10 ⋅ log 1 + bωT g
dB
dB
2
1 dB
2
dB
2
Bei Verwendung einer logarithmischen ω-Achse kann das asymptotische Verhalten für ω → 0 und
ω → ∞ untersucht werden:
ω → 0: HdB → 0 dB
ω → ∞: HdB → −20 ⋅ log ωT
b g
(Gerade bei 0 dB im Amplitudengang)
(Gerade mit -20 dB/Dek.-Steigung im Amplitudengang)
Die beiden Geraden (Asymptoten) schneiden sich bei ω = ωg =1/T. Bei dieser Frequenz betragen
HdB = −3 dB und ϕ H = − π 4 . Die nächste Figur zeigt das Bodediagramm mit ωg = 1:
20
HdB
Amplitudengang
ωg =1 T =1
Asymptoten
0
0 dB / Dek.
-3 dB
-20
-40 10 2
ϕH
0
1
10
10
0
-20
10
1
10
1
dB
/
D ek
.
10
2
10
2
Kreisfrequenz [s-1]
Phasengang
-45°
-30
-60
-90
2
10
1
10
Figur 4-19: Bodediagramm eines RC-Glieds
10
0
Kreisfrequenz [s-1]
aet/nik
4 Harmonische Zeitabhängigkeit
103
Meistens verwendet man das Bodediagramm zur Darstellung von Übertragungsfunktionen, aber
auch ein Impedanzverlauf Z(ω) kann damit dargestellt werden; dabei normiert man den Betrag Z auf
1 Ω und stellt diese (einheitenlose) Grösse „in dB“ dar [ 20 ⋅ log Z 1 Ω ]. Um sich an die Bodediagramm-Darstellung zu gewöhnen, werden die Ortskurvenbeispiele aus Figur 4-17 jetzt als Bodediagramme gezeigt (Figur 4-20 und Figur 4-21). Dabei wird nur die Impedanzfunktion verwendet.
b
g
Betrag von Z [dB]
80
60
40
20
R
L
0 2
10
10
3
10
4
10
5
10
6
Phase von Z [°]
90
60
30
0 2
10
10
3
4
10
Frequenz [1/s]
10
5
10
6
Betrag von Z [dB]
100
80
60
40
20
R
C
0 0
10
10
1
10
2
10
3
10
4
Phase von Z [°]
0
-30
-60
-90 0
10
Figur 4-20: Impedanzfunktionen und Bodediagramm
10
1
2
10
Frequenz [1/s]
10
3
10
4
aet/nik
4 Harmonische Zeitabhängigkeit
104
Betrag von Z [dB]
40
20
0
R
-20 4
10
L
10
5
10
6
10
7
10
8
Phase von Z [°]
90
60
30
0 4
10
10
5
6
10
Frequenz [1/s]
10
7
10
8
Betrag von Z [dB]
80
60
40
20
R
0 4
10
C
10
5
10
6
10
7
10
8
Phase von Z [°]
0
-30
-60
-90 4
10
10
5
6
10
Frequenz [1/s]
10
7
10
8
Figur 4-21: Impedanzfunktionen und Bodediagramm
Aufg4-45: Für die vier vorherigen Netzwerke (Figur 4-20 und Figur 4-21) sind die Bodediagramme
der Admittanz zu skizzieren (überlegen, nicht rechnen!).
Aufg4-46: Bestimmen Sie mit Hilfe der Bodediagramme (Figur 4-20 und Figur 4-21) die zugehörigen Netzwerkelemente numerisch.
aet/nik
4 Harmonische Zeitabhängigkeit
105
Das nächste Beispiel zeigt die Gegenüberstellung von Ortskurve und Frequenzgang; dabei wird hier
eine lineare Frequenzachse für den Frequenzgang verwendet (schmalbandiges Netzwerk).
Bsp4-4: Für das skizzierte Netzwerk sind die Ortskurve und der Frequenzgang zu zeichnen.
100 µ H
1000 Ω
100 µ H 200 Ω
1 nF
Ortskurve der Impedanz
1000
500
0
0
500
1000
1500
2000
2500
Betrag von Z in Funktion der Frequenz
2000
1500
1000
500
0
0
2
4
6
8
10
12
14
16
x 10
6
Phase von Z in Funktion der Frequenz
50
0
-50
0
2
4
6
8
10
12
14
16
x 10
6
Figur 4-22: Gegenüberstellung von Ortskurve und Frequenzgang
Aufg4-47: Kontrollieren Sie obige Figuren durch „eigene Rechnung“ (Matlab).
{Aufg4-48}
aet/nik
4 Harmonische Zeitabhängigkeit
106
4.6 Mehrphasensysteme
Generatoren, die nur eine einzige spannungserzeugende Wicklung (Einphasenwechselstrom) enthalten, sind schlecht ausgenutzt. Man kann ebenso gut z.B. drei gleichartige Wicklungen über den
Umfang verteilt unterbringen und so gleichzeitig drei gleich grosse, gegeneinander phasenverschobene Sinusspannungen erzeugen. Dies ist der Grund, warum heute etwa 99% der elektrischen Energie in Dreiphasengeneratoren erzeugt wird.
4.6.1 Begriffe und Übersicht
Ein Mehrphasensystem entsteht durch Zusammenschalten mehrerer Wechselspannungsquellen, die
zwar mit gleicher Frequenz, aber mit unterschiedlicher Phasenlage arbeiten. Nachfolgend ist ein
solches System skizziert. Darin wird allgemein „n“ als die Anzahl der spannungsführenden Leiter
oder „Phasen“ verwendet. Da es sich um harmonische Zeitabhängigkeit handelt (gleiche Frequenz),
kann das Mehrphasensystem auch mit der Zeigerrechnung (komplexe Ebene) behandelt werden.
I1
1
2
U12
I2
3
U23
I3
U34
Un1
n
Quelle
In
Last
Figur 4-23: Mehrphasensystem mit Quelle und Last
Zwischen je zwei Phasen können eine oder mehrere Einzelquellen wirken (seriell, parallel oder
kombiniert). Wenn die Spannungen U12 bis U1n betragsmässig gleich gross sind und in ihrer Phasenlage um je 2π n gegeneinander verschoben sind, dann spricht man von einem symmetrischen
n-Phasen-System.
Wendet man Knoten- und Maschensatz auf obiges Netzwerk an, so ergeben sich für die
Spannungen und Ströme (Zeigerdarstellung) :
I 1 + I 2 + I 3 + ... + I n = 0
U 12 + U 23 + U 34 + ... + U n1 = 0
Wir betrachten als Beispiel ein symmetrisches 5-Phasen-System. Dabei sind benachbarte Spannungszeiger um 2π 5 = 72° gegeneinander verschoben. In der Regel führt ein symmetrisches System noch einen weiteren Leiter, der gegen alle anderen Leiter die „gleiche Potentialdifferenz“ hat.
Er wird als Mittelpunktleiter bezeichnet, weil er im Zentrum des Spannungsvielecks liegt, das die
Zeiger U12, U23, U34, ... miteinander bilden (siehe auch Figur 4-24). Durch geometrische Beziehungen am (symmetrischen) n-Eck lässt sich der Abstand vom Mittelpunkt zur Ecke leicht berechnen.
Figur 4-24 zeigt das zugehörige Zeigerdiagramm für die Spannungen.
aet/nik
4 Harmonische Zeitabhängigkeit
107
2
U12
U23
U2M
1
3
ϕ
U1M
M
U51
U45
5
U jk
b g
2 ⋅ sin ϕ 2
(4.43)
U34
U4M
U5M
U iM =
U3M
4
Figur 4-24: Symmetrisches 5-Phasen-System mit Mittelpunkt M
Die Spannungen von Phase gegen den Mittelpunkt (UiM) bezeichnet man als Phasenspannungen
(Leiterspannungen oder Sternspannung). Die Spannungen zwischen den Leitern (Ujk) bezeichnet
man als Aussenleiterspannungen (verkettete Spannungen, Strangspannungen).
Das bekannteste System dieser Art ist das Dreiphasen- oder Drehstromsystem. Auf ihm basiert
unsere elektrische Energieversorgung. Es wird mit und auch ohne Mittelpunktsleiter verwendet. Figur 4-25 zeigt ein Dreiphasensystem mit Quelle (symmetrisch) und Last (beliebig).
Quelle (Generator)
Last (Verbraucher)
Zi
L1
Leiter 1
(R)
1
Z1
Zi
L2
Leiter 2
(S)
2
Z2
Zi
L3
Leiter 3
(T)
3
Z3
M
Mittelpunktsleiter
U1
U2
U3
Figur 4-25: Dreiphasensystem mit Erzeuger (links) und Verbraucher (rechts) mit Mittelpunktsleiter
Neben der neuen Bezeichnung der Leiter mit L1, L2 und L3 (oder 1, 2 und 3) sind auch die älteren
(R, S und T) angegeben.
Für das folgende Zeigerdiagramm wird Zi = 0 gesetzt (ideale Spannungsquellen), damit ergeben sich für die Phasenspannungen: U 1M = U 1 , U 2M = U 2 und U 3M = U 3
Bei n = 3 erhält man für ϕ = 2π 3 = 120° . Figur 4-26 zeigt die Phasenspannungen und die Aussenleiterspannungen im Zeigerdiagramm ( mit U 1 = U ∠0° ).
aet/nik
4 Harmonische Zeitabhängigkeit
2
U 1M = U ∠0°
U 2 M = U ∠ − 120°
U 3M = U ∠ − 240°
U12
U2M
1
U1M
108
Man sieht leicht, dass
U23
M
U3M
U 1M + U 2M + U 3M = 0
(4.44)
und
U31
U 12 + U 23 + U 31 = 0
(4.45)
3
Figur 4-26: Zeigerdiagramm für das Drehstromsystem
Die verketteten Spannungen können aus den Leiterspannungen berechnet werden (und umgekehrt);
mit Figur 4-26 erhält man:
U 12 = U 1M − U 2M = 3 ⋅ U ⋅ e jπ 6 = 3 ⋅ U ∠30°
U 23 = U 2M − U 3M = 3 ⋅ U ⋅ e − jπ 2 = 3 ⋅ U ∠ − 90°
U 31 = U 3M − U 1M = 3 ⋅ U ⋅ e j5π 6 = 3 ⋅ U ∠150°
Der Betrag der verketteten Spannung ist um
3 grösser als der Betrag der Phasenspannung
Nach diesem grundsätzlichen Aufbau arbeitet unser Versorgungsnetz. Auf Verbraucherebene sind
die Phasenspannungen 230 V; Kleinverbraucher werden daran angeschlossen. Grössere Lasten liegen an der Aussenleiterspannung von 400 V.
Eine völlig symmetrische Belastung der drei Phasen (Generatorwicklungen als Einzelquellen) als wünschenswertes Idealbild wird damit nicht (oder nur zufällig) erreicht. Grobe Schieflasten
werden durch Ab- oder Umschalten von Verbrauchergruppen verhindert.
Aufg4-49: Stellen Sie die Phasenspannungen aus Figur 4-26 im Zeitbereich dar. Skizzieren Sie die
drei Spannungen. Kontrollieren Sie ob (4.44) erfüllt ist (Zeitbereich)? Wie können Sie in Ihrer
Skizze die verketteten Spannungen ablesen?
Aufg4-50: In der Figur 4-25 werden jetzt die Quellenimpedanzen nicht vernachlässigt ( Z i ≠ 0 ).
Was passiert mit den Phasenspannungen UiM bei beliebiger Last? Gilt (4.44) immer noch?
aet/nik
4 Harmonische Zeitabhängigkeit
109
4.6.2 Drehstromverbraucher
Je nach Anordnung der Lastimpedanzen unterscheidet man verschiedene Schaltungen mit jeweils
eigenen Bezeichnungen (Sternschaltung, Dreieckschaltung, usw.). Dabei wird für die folgenden
Betrachtungen eine symmetrische Anordnung der Quellenspannungen angenommen und die Quellenimpedanzen werden vernachlässigt ( Z i = 0 ).
a) Dreieck-Schaltung, Symbol ∆
Die verketteten Spannungen und die Lastimpedanzen sind bekannt; alle Ströme und Leistungen sind
zu berechnen.
1
2
3
I1
I2
I3
1
U12
U31
Z12
2
I12
I23
U23
I31
Mit I = U ⋅ Y gelten:
I 12 = U 12 ⋅ Y 12
Z31
Z23
3
I 23 = U 23 ⋅ Y 23
I 31 = U 31 ⋅ Y 31
Figur 4-27: Dreieck-Schaltung (der Last)
Mit der Knotenregel erhält man für die Phasenströme:
I 1 = I 12 − I 31
I 2 = I 23 − I 12
I 3 = I 31 − I 23
Die total umgesetzte Scheinleistung ergibt sich zu:
S = U 12 ⋅ I 12 * + U 23 ⋅ I 23* + U 31 ⋅ I 31*
(4.46)
Ist die Last symmetrisch, also für Z 12 = Z 23 = Z 31 = 1 Y , gelten folgende (vereinfachte) Zusammenhänge:
I12 = I 23 = I 31 = U 12 ⋅ Y
(Beträge!)
I1 = I 2 = I 3 = 3 ⋅ I12
(Beträge!)
2
S = 3 ⋅ U12 ⋅ Y
*
{Aufg4-51 ... Aufg4-52}
aet/nik
4 Harmonische Zeitabhängigkeit
110
b) Stern-Schaltung, Symbol Y (mit Mittelpunktsleiter)
1
2
3
Z1
I1
I2
U1M
U2M
I3
Jeder der drei Verbraucher liegt an einer der
Phasenspannungen.
Z2
Z3
U3M
IM
M
Figur 4-28: Stern-Schaltung (der Last) mit Mittelpunktsleiter
Gegeneinander sind die Zeiger U1M, U2M und
U3M auch um 120° verschoben.
Die Phasenströme lassen sich leicht berechnen mit:
I 1 = U 1M Z 1 , I 2 = U 2M Z 2 , I 3 = U 3M Z 3
I1 + I 2 + I 3 + I M = 0
Zusätzlich gilt (Knotensatz):
Ist die Last symmetrisch, also für Z 1 = Z 2 = Z 3 = Z , gelten folgende Beziehungen:
I 1 + I 2 + I 3 = 0 und damit
IM = 0
[ I1 = I 2 = I 3 ( Beträge)]
Für eine symmetrische Last kann der Mittelpunktsleiter auch weggelassen werden (IM = 0). Mit einer symmetrischen Last (z.B. drei Widerstände) kann also der Mittelpunkt eines Drehstromsystems
„künstlich erzeugt“ werden (wird z.T. für Messzwecke benötigt).
{Aufg4-53 ... Aufg4-54}
c) Stern-Schaltung ohne Mittelpunktsleiter
1
2
3
Z1
I1
I2
I3
U1M
Z2
U2M
M’
Z3
Auch hier werden ideale (sym.)
Quellenspannungen vorausgesetzt mit
U 12 = U 23 = U 31 , (U 1M = U 2M = U 3M )
und 120° Phasenverschiebung zwischen den
Spannungen.
U3M
UMM`
M
Figur 4-29: Stern-Schaltung (der Last) ohne Mittelpunktsleiter
Da aber der Verbraucher-Sternpunkt M´ nicht mehr mit dem Mittelpunktsleiter M der
Erzeugerseite verbunden ist, entsteht (je nach Last) die Spannung UMM´.
Im Falle einer unsymmetrischen Last (Schieflast) werden die Zeiger U1M´, U2M´ und U3M´ verschieden lang und weichen auch in ihren (relativen) Phasenlagen von (den gewohnten) 120° ab.
Die Spannungen U12, U23, U31 sowie U1M, U2M und U3M sind vom Netz (ideale Spannungsquellen) gegeben. Den besten Überblick gibt das Zeigerdiagramm mit allen Spannungen.
aet/nik
4 Harmonische Zeitabhängigkeit
111
1
U1M'
U1M
U12
UMM'
M'
U2M'
M
U3M'
3
2
Figur 4-30: Zeigerdiagramm für unsymmetrische Last bei Sternschaltung ohne Mittelpunktsleiter
U1M´, U2M´ und U3M´ sind die Spannungen an den Verbraucherimpedanzen (siehe Figur 4-29). Sind
diese Spannungen bekannt, so berechnen sich die Phasenströme zu:
I 1 = U 1M' Z 1 , I 2 = U 2M' Z 2 , I 3 = U 3M' Z 3
Den „Schlüssel“ zur Berechnung der Verbraucherspannungen stellt die Spannung UMM´ dar (Spannung zwischen Erzeuger- und Verbraucher-Sternpunkt). Mit dem Knotensatz für M´ ergibt sich:
I 1 + I 2 + I 3 = 0 oder mit den Verbraucheradmittanzen:
Einsetzen von
U 1M' ⋅ Y 1 + U 2M' ⋅ Y 2 + U 3M' ⋅ Y 3 = 0
U 1M' = U 1M + U MM'
U 2M' = U 2M + U MM'
U 3M' = U 3M + U MM'
ergibt
und damit:
b
g
b
g
b
g
Y 1 ⋅ U 1M + U MM' + Y 2 ⋅ U 2M + U MM' + Y 3 ⋅ U 3M + U MM' = 0
U MM' = −
U 1M ⋅ Y 1 + U 2M ⋅ Y 2 + U 3M ⋅ Y 3
Y1 + Y 2 + Y 3
(4.47)
Mit UMM´ lassen sich die restlichen Spannungszeiger U1M´, U2M´ und U3M´ berechnen und damit auch
die Verbraucherströme (und Leistungen).
{Aufg4-55 ... Aufg4-56}
aet/nik
4 Harmonische Zeitabhängigkeit
112
4.6.3 Leistungsmessung (Wattmeter)
Durch (gleichzeitiges) Messen von Strom I und Spannung U (Beträge) kann der Betrag der
Scheinleistung mit S = UI leicht berechnet werden.
Die Messung der Wirkleistung P erfolgt mit einem sog. Wattmeter. Das Messwerk eines
elektromechanischen Wattmeters wird als elektrodynamisches Messwerk bezeichnet. Es besteht aus
einem Drehspulsystem (stromdurchflossene Drehspule), wobei das zur Ablenkung notwendige Magnetfeld durch eine zweite Wicklung erzeugt wird. Dadurch entsteht ein zum Produkt der beiden
Ströme proportionaler Zeigerausschlag.
Ein Wattmeter zeigt also die Wirkleistung P an, die sich aus den in Phase liegenden
Komponenten von Strom(-Zeiger) und Spannungs(-Zeiger) ergibt:
*
P = Re(U ⋅ I ) = U ⋅ I ⋅ cos(ϕ u − ϕ i )
U
Die Leistung P hängt vom Zwischenwinkel
von U und I ab, die absolute Lage der Zeiger
(Figur links) spielt keine Rolle.
I
ϕu −ϕi
U ⋅ cos(ϕ u − ϕ i )
Figur 4-31: Wirkleistung als Produkt der in Phase liegenden Komponenten (Skalarprodukt, Projektion)
Ist die Phasenverschiebung zwischen Strom und Spannung ∆ϕ = ± π 2 , so zeigt das Wattmeter
Null an (P = 0), da in diesem Fall I und U senkrecht aufeinander stehen (Projektion ergibt Null).
Mit den gemessenen Werten von S und P kann Q berechnet werden mit Q = S 2 − P 2 . Ob es
sich um eine induktive oder kapazitive Last handelt (Vorzeichen von Q), muss mit zusätzlicher Information bestimmt werden. Figur 4-32 zeigt eine übliche Anordnung zur Leistungsmessung in einem einphasigen System (man beachte das Symbol für das Wattmeter).
W
I
A
Quelle
(Netz)
V
U
Z
Figur 4-32: Gleichzeitige Strom-, Spannungs- und Leistungsmessung (1-phasig)
Aufg4-57: In obiger Schaltung werden die folgenden Werte gemessen: U = 178 V, I = 3.41 A und P
= 485 W. Bestimmen Sie Q und den Leistungsfaktor cosϕ. Nehmen Sie an, es handle sich um eine
kapazitive Last; bestimmen Sie nun das Serie-Ersatzschaltbild und das Parallel-Ersatzschaltbild (je
zwei Elemente), (f = 50 Hz).
aet/nik
4 Harmonische Zeitabhängigkeit
113
Leistungsmessung bei mehrphasigen Systemen
Weist ein Netzwerk mehr als zwei Anschlüsse auf, so muss die Gesamtleistung durch Addition von
Einzelleistungen ermittelt werden. Dabei ist jede Einzelleistung nur mit zwei Klemmen (Leitern)
definiert. Figur 4-33 zeigt (Last)-Netzwerke mit drei und mit vier Leitern.
i1(t)
1
2
3
i1(t)
1
i2(t)
u12(t)
i3(t)
u23(t)
p(t) = ?
2
3
4
i2(t)
u12(t)
i3(t)
u23(t)
i4(t)
u34(t)
p(t) = ?
Figur 4-33: Leistungsberechnung bei Mehrleitersystemen
Aufg4-58: Diskutieren Sie in obiger Figur die Definition/Berechnung von p(t). Wie viele Wattmeter
sind jeweils zur Messung von P = p(t ) nötig?
Für die Leistungsmessung in einem 3-Leitersystem genügen zwei Wattmeter. Figur 4-34 zeigt eine
mögliche Anordnung der beiden Wattmeter, die Schaltung wird auch als Aronschaltung bezeichnet.
1
I1
PWI
U12
Last
2
3
I3
U32
PWI, PWII:
Anzeigen der Wattmeter
P:
Gesamte Wirkleistung
P = PWI + PWII
PWII
(4.48)
Figur 4-34: Aronschaltung zur Leistungsmessung im 3-Leiter-System (2-Wattmeter-Methode)
Aufg4-59: Leiten Sie die Formel (4.48) her. Gibt es weitere Anordnungen der zwei Wattmeter, für
die ebenfalls (4.48) gilt?
{Aufg4-60}
aet/nik
4 Harmonische Zeitabhängigkeit
114
4.7 Ausgewählte Anwendungen
Mit den bisher behandelten Methoden und „Werkzeugen“ (Zeigerrechnung, Ortskurve, Frequenzgang, usw.) werden nun ausgewählte Themen der (grundlegenden) Elektrotechnik behandelt.
4.7.1 Resonanz, Gütefaktor und Schwingkreise
Aufg4-61: Wie soll bei einem RLC-Netzwerk eine Resonanzfrequenz definiert werden? Was bedeutet Ihnen der Begriff der „Resonanz“? Was „passiert“ bei der Resonanzfrequenz? Wie stellen
Sie „Resonanz“ fest (Netzwerk an zwei Klemmen zugänglich)? Diskutieren Sie die Fragen innerhalb der Klasse.
Das Phänomen der Resonanz kann nur auftreten, wenn ein „schwingfähiges“ System vorliegt. Es
müssen mindestens zwei (unterschiedliche) Energiespeicher vorkommen, damit ein System
„schwingfähig“ ist (notwendige, aber nicht hinreichende Bedingung). Kann in einem (technischen)
System Energie zwischen zwei Speichern ausgetauscht werden (z.B. kinetische und potentielle
Energie) und sind die Verluste genügend klein, so spricht man von einem „schwingfähigen System“. Typische Beispiele für schwingfähige Systeme sind z.B. Federpendel, Schnurpendel und
Kinderschaukel. Selbstverständlich sind auch alle RLC-Netzwerke ( n ≥ 2 ) schwingfähige Systeme.
Regt man ein schwingfähiges System mit einem kurzen Impuls an (kleine Energiemenge in
einen der Speicher stecken), so schwingt es selbständig aus (freie Schwingung). Je nach Dämpfung
(Verluste), dauert dieses Ausschwingen ein paar wenige bis sehr viele Perioden. [In der Physik bezeichnet man diese „Ausschwingfrequenz“ (der freien Schwingung) als Resonanzfrequenz.]
Das Phänomen der Resonanz tritt dann auf, wenn man mit einer äusseren (periodischen) Anregung eine Resonanzfrequenz des Systems trifft: Trotz (kleiner) Anregungsamplitude können sehr
grosse Amplituden im System auftreten, die sogar bis zur Zerstörung desselben führen können
(Einsturz von Brücken). In vielen technischen Systemen ist hingegen das Resonanzphänomen erwünscht.
In der Elektrotechnik „leben“ viele (schmalbandige) Schaltungen vom Resonanzphänomen
(Oszillatoren, schmalbandige LC-Filter, Schwingkreise, Verstärker der Klasse C, u.a.). Auch viele
Musikinstrumente basieren auf dem Resonanzphänomen (schwingende Saite, schwingende Membran, schwingende Luftsäule, usw.).
Das Resonanzphänomen tritt also bei vielen (technischen) Systemen auf und ist gekennzeichnet
durch:
- verlustarmen Austausch von Energie (mindestens 2 unterschiedliche Speicher)
- grosse Mengen an gespeicherter Energie (im Vergleich zur Anregung)
- einmalige Anregung führt zu „freiem Ausschwingen“
Das Gütemass des Resonanzphänomens (eines Resonators) ist der sog. Gütefaktor Q. Er ist ein
Mass für die gespeicherte Energie im Verhältnis zu den Verlusten (der Schwingung). Die Definition
des Gütefaktors Q lautet (siehe auch Aufg4-9):
Q = 2π ⋅
maximal gespeicherte Energie
verheizte Energie in einer Periode
(4.49)
aet/nik
4 Harmonische Zeitabhängigkeit
115
Ein schwingfähiges System mit ausgeprägtem Resonanzphänomen bezeichnet man auch als Resonator. Resonatoren sind gekennzeichnet durch Resonanzfrequenz(en) und Güte(n). Der einfachste
Resonator wird von Spule und Kondensator gebildet (Schwingkreis). Dabei sind beide Elemente
verlustbehaftet. Die Güte der Elemente („Qualität“) wird durch einen, dem Element zugeordneten,
Gütefaktor angegeben (QL und QC); werden die Elemente losgelöst von einem Schwingkreis betrachtet, so weist man jedem Element seinen eigenen Gütefaktor zu. Dabei ergänzt man in Gedanken das einzelne Element zu einem Schwingkreis (mit einem verlustlosen Element), [weil die Definition des Gütefaktors sinnvollerweise einen Austausch von Energie erfordert (zwei Speicher)]. Figur 4-35 zeigt einen Schwingkreis und die einzelnen Elemente mit ihrem Gütefaktor.
Spule mit QL
L
(Einzelelement wird "virtuell" zu
einem Resonator ergänzt)
C
QC
QL
Kondensator mit QC
Qtot
Figur 4-35: Schwingkreis mit verlustbehafteten Elementen
Die Berechnung für den Gütefaktor des gesamten Schwingkreises ergibt (wird später hergeleitet):
1
1
1
=
+
Qtot QL QC
oder
Qtot =
QL ⋅ QC
QL + QC
(4.50)
Für die vier grundlegenden Fälle von verlustbehafteten Elementen sind die Gütefaktoren in der folgenden Zusammenstellung angegeben. In Gedanken (virtuell) wird das entsprechende (verlustbehaftete) Element bei der Frequenz ω 0 (mit einem verlustlosen Element → Q = ∞ ) zu einem
Schwingkreis ergänzt. Jedes angegebene Q ist dann als Gütefaktor dieses (fiktiven) Schwingkreises
(bei der Frequenz ω 0 ) aufzufassen. Für die Herleitung der Formeln wird auf Aufg4-9 verwiesen.
Rs
L
C
Rs
Q=
ω0L
Rs
(4.51)
Q=
1
ω 0CRs
(4.52)
L
Rp
Q=
Rp
ω0L
(4.53)
C
Rp
Q = ω 0 CRp
(4.54)
aet/nik
4 Harmonische Zeitabhängigkeit
116
Die Formeln (4.51)...(4.54) sind elementar und wichtig, sie müssen jederzeit verfügbar sein (Merkregeln bilden)! Oft wird auch der Begriff des Verlustfaktors tan(δ) verwendet, der definiert ist als:
tan(δ ) =
1
Q
(4.55)
{Aufg4-62}
4.7.2 Serie-Parallel-Umformung
Eine häufig verwendete Netzwerkumformung ist die sog. Serie-Parallel-Umformung. Dabei wird
eine Serieschaltung zweier Elemente durch eine Parallelschaltung von zwei Elementen approximiert (oder umgekehrt). Die Umformung gilt (exakt) nur bei einer Frequenz (oder schmalbandig in
der Nähe dieser Frequenz). Figur 4-36 zeigt die entsprechenden Netzwerke.
≈
Ls
ω = ω0
Rs
≈
Cs
ω = ω0
Rs
Lp
Rp
Cp
Rp
Durch Vergleich der jeweiligen Impedanz- oder Admittanzfunktionen lassen sich die Umrechnungsformeln
leicht herleiten (für beide Richtungen). Man beachte, dass
in den Formeln gerade die Gütefaktoren (4.51)...(4.54)
vorkommen. Je grösser der Gütefaktor, desto besser
stimmt die Approximation (grösserer Frequenzbereich).
Ist der Gütefaktor genügend gross, so lassen sich die
Formeln wesentlich vereinfachen. Mit Q = 5 wird der
Fehler bei den vereinfachten Formel etwa 4%. Für Q > 10
(in der Praxis meistens erfüllt!) werden nur noch die
vereinfachten Formeln (4.56) verwendet.
Figur 4-36: Serie-Parallel-Umformung (zwei Elemente)
Rp
Rs =
Rp
=
L R OP 1 + Q
1+ M
MNω L PQ
L Lω L O OP = R ⋅ 1 + Q
= R ⋅ M1 + M
MN N R PQ PQ c h
2
2
p
0
p
2
Rp
0
s
2
s
s
s
Rs =
Rp
Rp
=
Rp
d
i
OP = R ⋅ 1 + Q
L
1
= R ⋅ M1 +
NM bω C R g QP
1 + ω 0C p R p
s
Q=
Rp
ω 0 Lp
s
=
2
0
2
p
p
2
p
2
s
s
0
s
s
2
p
2
0
2
s
s
ω 0 Ls
Rs
Lp
=
Lω L OP 1 + 1 Q
1+ M
MN R PQ
L L R O OP = L ⋅ 1 + 1 Q
L = L ⋅ M1 + M
h
MN Nω L PQ PQ c
OP
LM
1
C = C ⋅ 1+
MN dω C R i PQ = C ⋅ c1 + 1 Q h
s
1 + Q2
2
0
mit:
2
Lp
Ls =
oder:
Cp =
b
Cs
1 + ω 0Cs Rs
Q = ω 0C p R p =
p
g
2
p
=
Cs
1 + 1 Q2
1
ω 0Cs Rs
p
aet/nik
4 Harmonische Zeitabhängigkeit
117
Für Q >> 1 (Q > 10 genügt) gelten die vereinfachten Beziehungen:
Ls = L p
Cs = C p
(4.56)
R p = Rs ⋅ Q 2
Rs = R p Q 2
{Aufg4-63 ... Aufg4-67}
Aufg4-68 (Einführendes Beispiel): Beim skizzierten Netzwerk wird der Strom i(t) eingespeist.
uL(t)
uC(t)
uR(t)
i(t)
L = 100 mH,
u(t)
L
C
Rs
C = 10 µF,
Rs = 12.5 Ω
i (t ) = I ⋅ cos(ω 0 t ), I = 01
. A , ω 0 = 103 s −1
- Berechnen und skizzieren (Matlab) Sie alle eingetragenen Spannungen (in einer Figur)
- Berechnen und skizzieren Sie die gespeicherten Energien in L und C [wC(t) und wL(t)]
Skizzieren Sie zusätzlich die gesamte gespeicherte Energie w(t) = wC(t) + wL(t)
- Berechnen und skizzieren Sie die Leistung p(t ) = u(t ) ⋅ i (t ) , wie gross ist der Mittelwert?
- Wo überall „sehen“ Sie den Gütefaktor Q ?
4.7.3 Serieschwingkreis und Resonanz
Ein Serieschwingkreis mit Verlustwiderstand ist in der Figur 4-37 abgebildet. Die folgende Herleitung für die Impedanz (besondere Art der Schreibweise) ist „klassisch“ und wiederholt sich dann
auch beim Parallelschwingkreis für die Admittanz (Dualität).
L
C
Rs
ω0 =
Q=
1
Rs
1
LC
L
C
Z
Figur 4-37: Serieschwingkreis mit Verlustwiderstand
Für die Impedanz der Serieschaltung der drei Grundelemente schreibt man:
Z = Rs + jω L +
FG
H
1
1
= Rs + j ⋅ ω L −
jω C
ωC
ausklammern von
IJ
K
L
im Imaginärteil ergibt:
C
aet/nik
4 Harmonische Zeitabhängigkeit
Z = Rs + j ⋅
FG
H
L
1
⋅ ω LC −
C
ω LC
IJ
K
1
erhält man:
LC
mit einsetzen von ω 0 =
Z = Rs + j ⋅
118
FG
H
L ω ω0
⋅
−
C ω0 ω
IJ
K
Schliesslich wird Rs aus dem ganzen Ausdruck ausgeklammert:
LM
N
Z = Rs ⋅ 1 + j ⋅
FG
H
L ω ω0
⋅
−
C ω0 ω
1
Rs
IJ OP
KQ
Eine weitere Vereinfachung ergibt sich durch einsetzen von Q =
1
ω ω0
L
⋅
und υ =
−
Rs C
ω0 ω
(Gütefaktor und Verstimmung):
Z = Rs ⋅ 1 + j ⋅ Q ⋅ υ
In der Umgebung von ω 0 kann eine Näherung (Linearisierung) für die Verstimmung verwendet
werden:
∆ω
ω ω0 2 ω −ω0
υ=
−
≈
=2
ω0 ω
ω0
ω0
Damit erhält man eine Näherung für Z, falls ∆ω ω 0 << 1 :
b
LM
N
Z ≈ Rs ⋅ 1 + j ⋅ Q ⋅
2 ∆ω
ω0
g
OP
Q
Die wichtigen Begriffe und Formeln zusammengefasst:
Resonanzfrequenz:
ω0 =
Gütefaktor:
Q=
Verstimmung:
υ=
1
Rs
1
LC
(4.57)
L
C
(4.58)
ω ω0
−
ω0 ω
aet/nik
4 Harmonische Zeitabhängigkeit
119
Impedanzfunktion des Serieschwingkreises:
LM
N
Z = Rs ⋅ 1 + j ⋅
1
Rs
FG
H
L ω ω0
⋅
−
C ω0 ω
IJ OP = R ⋅ LM1 + j ⋅ Q ⋅ FG ω − ω IJ OP = R ⋅ 1 + j ⋅ Q ⋅υ
KQ N
Hω ω KQ
0
s
s
0
(4.59)
Die Frequenz ω0 (später ωr) bezeichnet man als Resonanzfrequenz, weil dort Strom und Spannung
in Phase sind. Damit ist schon festgelegt, wie der Elektroingenieur den Begriff der Resonanzfrequenz definiert:
Ein beliebiges RLC-Netzwerk (Ordnung ≥ 2) ist an zwei Klemmen zugänglich (Eintor):
„Man stellt Resonanz fest, wenn Strom und Spannung in Phase sind“
Die Resonanzfrequenz ist also diejenige Frequenz (der erzwungenen Schwingung), bei der obige
Bedingung erfüllt ist. Angewendet auf die Impedanz- oder Admittanzfunktion ergibt dies für die
Resonanzbedingung:
Im( Z ) = 0, Im(Y ) = 0, Z , Y = reell
„Resonanz“ falls:
Lässt man die Frequenz ω wachsen von 0 ≤ ω ≤ ∞ , so treten (im allgemeinen Fall) abwechslungsweise Serieresonanzen und Parallelresonanzen auf. Handelt es sich um ein verlustloses Netzwerk, so gilt:
X =0 Þ B→∞
Serieresonanz:
„Strom, aber keine Spannung“
Parallelresonanz:
„Spannung, aber kein Strom“ B = 0 Þ X → ∞
(Kurzschluss!)
(Leerlauf!)
Verlustbehaftete Netzwerke wirken bei einer Serieresonanz niederohmig (reell) und bei einer
Parallelresonanz hochohmig (reell).
Die Formel (4.59) stellt die Impedanzfunktion des Serieschwingkreis mit Real- und Imaginärteil
dar. Die Darstellung von Z mit Betrag und Phase ergibt:
b g
L F ω − ω I OP
= arctanbQ ⋅ υ g = arctan MQ ⋅ G
N H ω ω JK Q
Z = Z = Rs ⋅ 1 + Q ⋅ υ
∠Z = ϕ Z
2
0
0
Aufg4-69: Skizzieren Sie die Ortskurven der Impedanz und Admittanz des Serieschwingkreises.
Welche markanten Punkte wären interessant?
Bei der Impedanzfunktion (4.59) und der zugehörigen Ortskurve werden die sog. Grenzfrequenzen
ω1 und ω2 definiert. Bei diesen Frequenzen gilt:
aet/nik
4 Harmonische Zeitabhängigkeit
bg
bg
Re Z = Im Z
Þ ϕ Z = ± π 4 Þ ω 1,2 = ?
Q⋅
Mit (4.59) und obiger Bedingung erhält man:
120
FG ω − ω IJ = ±1
Hω ω K
0
0
Löst man diese Gleichung(en) nach ω auf, so ergibt sich für die Grenzfrequenzen ω1 und ω2:
untere Grenzfrequenz:
ω1 = ω 0 ⋅
LM
N
1+
1
1
−
2
4Q
2Q
OP
Q
obere Grenzfrequenz:
ω2 = ω0 ⋅
LM
N
1+
1
1
+
2
4Q
2Q
OP
Q
∆ω = ω 2 − ω 1 =
Bandbreite:
(4.60)
(4.61)
ω0
Q
(4.62)
ω 0 = ω 1 ⋅ω 2
„Mittenfrequenz“:
(4.63)
Für „genügend grosse Q“ können die Formeln für die Grenzfrequenzen vereinfacht werden zu:
LM
N
ω1 = ω 0 ⋅ 1−
OP
Q
1
,
2Q
LM
N
ω 2 = ω 0 ⋅ 1+
1
2Q
OP
Q
für Q >> 1 (Q > 10 genügt!)
{Aufg4-71 ... Aufg4-74}
4.7.4 Der Parallelschwingkreis
Ein Parallelschwingkreis mit Verlustwiderstand ist in der Figur 4-38 abgebildet. Da Parallelschwingkreis und Serieschwingkreis duale Netzwerke sind, lässt sich die ganze Herleitung vom
Serieschwingkreis übernehmen (Admittanz Y statt Impedanz Z).
ω0 =
L
Y
C
Rp
Q = Rp
1
LC
C
L
Figur 4-38: Parallelschwingkreis mit Verlustwiderstand
Zur Erinnerung sind die Zusammenhänge für duale Netzwerkelemente wiederholt:
R → G , G → R,
L → C , C → L, U → I , I → U , Z → Y , Y → Z
Für die Herleitung wird also auf den Serieschwingkreis verwiesen, hier werden nun die wichtigen
Formeln zusammengestellt:
aet/nik
4 Harmonische Zeitabhängigkeit
Resonanzfrequenz:
ω0 =
Gütefaktor:
Q = Rp
υ=
Verstimmung:
121
1
LC
(4.64)
C
L
(4.65)
ω ω0
−
ω0 ω
Admittanzfunktion des Parallelschwingkreises:
Y=
LM
N
FG
H
C ω ω0
1
⋅ 1 + j ⋅ Rp
⋅
−
L ω0 ω
Rp
IJ OP = 1 ⋅ LM1 + j ⋅ Q ⋅ FG ω − ω IJ OP = 1 ⋅ 1 + j ⋅ Q ⋅ υ
KQ R N
Hω ω KQ R
0
p
0
p
(4.66)
Die Frequenz ω0 (später ωr) bezeichnet man wiederum als Resonanzfrequenz, weil dort Strom und
Spannung in Phase sind.
Die Linearisierung in der Umgebung von ω0 für die Verstimmung υ führt auf eine Näherung für Y, falls ∆ω ω 0 << 1 :
Y≈
LM
N
1
2 ∆ω
⋅ 1+ j ⋅Q ⋅
ω0
Rp
OP
Q
Die Formel (4.66) stellt die Admittanzfunktion des Parallelschwingkreises mit Real- und Imaginärteil dar. Die Darstellung von Y mit Betrag und Phase ergibt:
Y =Y =
∠Y = ϕ Y
b g
1
⋅ 1 + Q ⋅υ
Rp
2
Þ Z=
Rp
b g
L F ω − ω I OP
= arctanbQ ⋅ υ g = arctan MQ ⋅ G
N H ω ω JK Q
1 + Q ⋅υ
2
0
0
Bei der Resonanzfrequenz ω0 (υ = 0) wird der (verlustbehaftete) Parallelschwingkreis reell und
„hochohmig“ (grösster Betrag).
Wie beim Serieschwingkreis definiert man die Grenzfrequenzen ω1 und ω2. Bei diesen Frequenzen gilt
Re Y = Im Y
Þ ϕ Y = ± π 4 Þ ϕ Z = m π 4 Þ ω 1,2 = ?
bg
bg
Auch hier erhält man die Bedingung:
Q⋅
FG ω − ω IJ = ±1
Hω ω K
0
0
Somit gelten für die Grenzfrequenzen die gleichen Formeln wie für den Serieschwingkreis,
nämlich (4.60) bis (4.63).
aet/nik
4 Harmonische Zeitabhängigkeit
122
Die folgende Zusammenstellung zeigt die Gemeinsamkeiten und Unterschiede von Serieund Parallelschwingkreis:
L
C
Rs
Q=
LM
N
Z = Rs ⋅ 1 + j ⋅ Q ⋅
1
Rs
L
L
C
Rp
FG ω − ω IJ OP
Hω ω KQ
Y=
0
0
Z
FG
H
C
L
IJ OP
KQ
ω0
Y
ω0
Z
ω0
Z
ω0
π 2
LM
N
1
ω ω0
⋅ 1+ j ⋅Q⋅
−
ω0 ω
Rp
Z
ω0
Y
Q = Rp
C
ω
ϕZ
π 2
ω0
Verstimmung:
Untere Grenzfrequenz:
ϕZ
ω
ω
ω0
−π 2
Resonanzfrequenz:
ω
ω0
−π 2
1
LC
ω ω0
υ=
−
ω0 ω
ω0 =
Obere Grenzfrequenz:
LM
N
OP
Q
LM
N
L 1 + 1 OP ≈ ω
ω = ω ⋅ M 1+
N 4Q 2Q Q
1
ω ⋅ ω ≈ bω + ω g
2
ω1 = ω 0 ⋅
1+
2
0
2
„Mittenfrequenz“:
ω0 =
Bandbreite:
∆ω = ω 2 − ω 1 = ω 0 Q
1
2
OP
Q
L 1 OP
⋅ M1 +
N 2Q Q
1
1
1
−
≈ ω 0 ⋅ 1−
2
4Q
2Q
2Q
1
0
2
{Aufg4-75 ... Aufg4-80}
aet/nik
4 Harmonische Zeitabhängigkeit
123
Bestimmung des Gütefaktors Q aus der Phasensteilheit
In der Praxis ist die messtechnische Bestimmung des Gütefaktors eine häufige und wichtige Problemstellung. Der Gütefaktor ist nur im Zusammenhang mit einer Resonanzfrequenz (sinnvoll) definiert. Bei einer Resonanzfrequenz wird die Impedanz oder Admittanz rein reell, d.h. die Phase
läuft bei ω = ω0 durch Null (reelle Achse in der komplexen Ebene). Die Phasenänderung (Phasensteilheit) bei diesem Nulldurchgang kann messtechnisch einfach ausgewertet werden und ist eine
der Möglichkeiten zur Gütefaktorbestimmung. Figur 4-39 zeigt den Phasenverlauf der Impedanzfunktion für verschiedene Gütefaktoren (am Beispiel der Serieresonanz).
π 2
ϕZ
Q3
Q2
Q1
Q1 = 3
ω
ω0
Q2 = 10
Q3 = 50
−π 2
Figur 4-39: Zusammenhang von Phasensteilheit und Gütefaktor (Serieresonanz)
Aus der Graphik ist ersichtlich, dass ein grosser Gütefaktor zu einer „schnellen Phasenänderung“ führt. Dieser Zusammenhang wird nun analytisch ausgewertet.
LM F ω − ω I OP ergibt sich für die Ableitung der Phase nach ω:
N GH ω ω JK Q
F 1 + ω IJ
Q⋅G
H ω ω K . Setzt man ω = ω ein, so erhält man: dϕ = Q ⋅ 2
dϕ
=
dω
ω
dω
L F ω − ω IJ OP
1 + MQ ⋅ G
N Hω ω KQ
Mit ϕ = arctan Q ⋅
0
0
0
2
0
0
2
ω =ω 0
0
0
0
Aufgelöst nach Q:
Q=
dϕ
1
⋅ω 0 ⋅
dω
2
=
ω =ω 0
dϕ
1
⋅ f0 ⋅
df
2
(4.67)
f = f0
In der Praxis (Messtechnik) wird dϕ dω durch ∆ϕ ∆ω ersetzt (siehe auch Übung get 4-4).
{Aufg4-81}
aet/nik
4 Harmonische Zeitabhängigkeit
124
Resonanzfrequenz bei verlustbehafteten Schwingkreisen
Je nach Anordnung des Verlustwiderstandes innerhalb des Schwingkreises kann die Resonanzfrequenz vom Verlustwiderstand (Gütefaktor) abhängig sein (siehe auch Aufg4-76). Figur 4-40 zeigt
zwei Parallelschwingkreise mit unterschiedlicher Anordnung der (Verlust-)Widerstände.
L
L
Rs
C
ω0 =
C
Rp
Y1
Y2
1
LC
(Abkürzung)
Figur 4-40: Parallelschwingkreis mit Verlusten (Modellierung mit Parallel- oder Seriewiderstand)
Bei einer Parallelresonanz gilt: Im(Y) = 0. Für beide obige Netzwerke wird jetzt der Imaginärteil der
Admittanz berechnet und die Resonanzfrequenz ωr bestimmt:
FG
H
1
1
+ j ⋅ ωC −
Rp
ωL
1
Im Y 1 = ω C −
ωL
Y1 =
b g
ImbY g = 0
1
IJ
K
Þ ωr = ω0 =
R − jω L
1
= jω C + 2s
2
Rs + jω L
Rs + ω L
ωL
= ωC − 2
2
Rs + ω L
Y 2 = jω C +
b g
Im Y 2
1
LC
b g
b g
Þ ωr =
Im Y 2 = 0
mit QL =
b g
1
Rs
1
1
⋅ 1− 2
QL
LC
L
C
In obiger Rechnung ist leicht zu sehen, dass der Imaginärteil von Y2 (rechtes Netzwerk) von Rs abhängt und damit auch die Resonanzfrequenz von Rs abhängig wird. Für den allgemeinen Fall von
verlustabhängiger Resonanzfrequenz (bei Parallel- und Serieschwingkreis) sind die Formeln
nachstehend zusammengefasst.
L
RLS
ωr = ω0 ⋅
RCS
C
QC =
L
RLP
1
2
⋅ 1 − 1 QL
2
1 − 1 QC
1
L
⋅
,
RCS C
QL =
(4.68)
1
L
⋅
RLS C
C
RCP
ωr = ω0 ⋅
QC = RCP ⋅
ω0 =
1
LC
1
2
⋅ 1 − 1 QC
2
1 − 1 QL
C
,
L
QL = RLP ⋅
(4.69)
C
L
{Aufg4-82 ... Aufg4-86}
aet/nik
4 Harmonische Zeitabhängigkeit
125
4.7.5 Reaktanzeintore
Siehe separat abgegebene Unterlagen.
4.7.6 Leistungsanpassung mit reaktiven Elementen
Eine wichtige und häufige Anwendung von reaktiven Elementen ist die (verlustlose) Leistungsanpassung von Quelle und Last mit unterschiedlichen Impedanzen (Widerständen). In Kapitel 2.2.9
wurde gezeigt, dass eine Quelle (mit Quellenwiderstand Rq) ihre maximale Leistung (PAV) dann abgibt, wenn sie mit einem Widerstand belastet wird, der gleich gross wie der Quellenwiderstand ist.
Stimmen Quellen- und Lastwiderstand nicht überein, so wird ein Teil der verfügbaren Leistung
nicht abgegeben (reflektiert). Mit Hilfe eines verlustlosen Netzwerkes soll nun der Lastwiderstand
an den Quellenwiderstand angepasst werden. Figur 4-41 zeigt die Anordnung mit Quelle, Anpassnetzwerk und Lastwiderstand.
Z1
Rq
?
P1
Uq
RL
P2
„APNW“:
Anpassnetzwerk
Z1 :
Eingangsimpedanz
"APNW"
PAV =
Uq
2
4 ⋅ Rq
Quelle mit PAV
Figur 4-41: Quelle, Anpassnetzwerk und Lastwiderstand
Gesucht ist ein verlustloses Anpassnetzwerk, so dass P2 = PAV wird. Bei einem verlustlosen Netzwerk gilt: P2 = P1. Damit ist leicht ersichtlich, dass die Eingangsimpedanz gleich dem Quellenwiderstand werden muss:
Forderung
P2 = PAV
verlustlos
Þ
P2 = P1 Þ
P1 = PAV
Leistungsanpassung
Þ
Z 1 = Rq
Die Aufgabe des APNW besteht jetzt also darin, den Lastwiderstand auf den Wert des Quellenwiderstandes zu transformieren (Impedanztransformation, siehe Figur 4-42).
Z1 = Rq
?
RL
Figur 4-42: Impedanztransformation mit APNW
Die Forderung Z1 = Rq kann (exakt) nur genau bei einer Frequenz erfüllt werden. Für diese eine
Frequenz genügen zwei reaktive Elemente für das Anpassnetzwerk. Durch grössere Ordnung des
Anpassnetzwerkes (mehr als zwei Elemente) lässt sich die Bandbreite für die Leistungsanpassung
(beliebig) vergrössern. Jetzt wird aber nur die Lösung für eine Frequenz betrachtet.
aet/nik
4 Harmonische Zeitabhängigkeit
126
Es existieren genau zwei Netzwerktopologien, die die gewünschte Transformation durchführen. Die erste Topologie kommt für Rq > RL zur Anwendung, die zweite Topologie für Rq < RL.
Figur 4-43 zeigt die beiden Netzwerkstrukturen.
j X1
j X2
j X3
RL
RL
j X4
Rq
Rq
Rq < RL
Rq > RL
Figur 4-43: Netzwerktopologien für Leistungsanpassung (bei einer Frequenz)
Rq =
Für das linke Netzwerk erhält man:
1
1
1
+
jX 2 RL + jX 1
Das sind zwei Gleichungen (!) für die zwei unbekannten Werte X1 und X2. Aufgelöst nach X1 und X2
ergeben sich zwei (gleichwertige) Lösungspaare:
d
i
X 1 = RL ⋅ Rq − RL ,
X2 =
F
GH
−1
1 1
1
−
Rq RL Rq
I
JK
(4.70)
oder
d
i
X 1 = − RL ⋅ Rq − RL ,
X2 =
F
GH
1
1 1
1
−
Rq RL Rq
I
JK
(4.71)
Obige Gleichungen gelten für den Fall Rq > RL.
Man beachte, dass positive Reaktanzen (Xi > 0) durch eine Spule und negative Reaktanzen (Xi < 0)
durch einen Kondensator realisiert werden. Mit (4.70) und (4.71) erhält man zwei Anpassnetzwerke,
die beide je eine Spule und einen Kondensator erhalten.
aet/nik
4 Harmonische Zeitabhängigkeit
127
Bsp4-5: Für Rq = 150 Ω und RL = 50 Ω sind die Anpassnetzwerke zu bestimmen. Mit (4.70) und
(4.71) erhält man die Lösungen: X1 = 70.71 Ω und X2 = –106.07 Ω, oder X1 = –70.71 Ω und X2
= 106.07 Ω. Figur 4-44 zeigt die beiden zugehörigen Netzwerke. Bei bekannter Frequenz könnten
aus den Reaktanzen leicht die Werte für L und C berechnet werden.
X1 = 70.71 Ω,
X2 = –106.07 Ω
X1 = –70.71 Ω,
− j 70.71 Ω
j 70.71 Ω
− j 106.07 Ω
X2 = 106.07 Ω
50 Ω
j 106.07 Ω
50 Ω
150 Ω
150 Ω
Figur 4-44: Verlustlose Anpassnetzwerke für Rq = 150 Ω und RL = 50 Ω (Bsp4-5)
Die Werte für L und C sind in obigen beiden Netzwerken nicht identisch. Die Wahl für eines der
beiden Netzwerke ist Geschmackssache und hängt evtl. von zusätzlichen Randbedingungen ab
(Tiefpass vs. Hochpass, usw.).
Aufg4-89: Kontrollieren Sie die Werte der Reaktanzen in Figur 4-44. Berechnen Sie für beide
Netzwerke die Elemente, wenn die Frequenz f0 = 35 MHz beträgt.
Betrachtet man in Figur 4-43 das rechte Netzwerk und vertauscht Quellen- und Lastwiderstand,
so erhält man das linke Netzwerk. Damit muss die Berechnung nicht nochmals durchgeführt werden, die bestehenden Formeln können direkt verwendet werden (mit geeigneter Substitution):
Für das rechte Netzwerk (Figur 4-43) erhält man:
d
i
X 3 = Rq ⋅ RL − Rq ,
X4 =
F
GH
−1
1 1
1
−
RL Rq RL
I
JK
(4.72)
oder
d
i
X 3 = − Rq ⋅ RL − Rq ,
X4 =
F
GH
1
1 1
1
−
RL Rq RL
I
JK
(4.73)
Obige Gleichungen gelten für den Fall Rq < RL.
Von den vier Formeln (4.70)...(4.73) benötigt man nur zwei, da es für das Anpassnetzwerk keine
Rolle spielt, welcher Widerstand Rq heisst und welcher RL. Um sich die Anordnung der Reaktanzen
zu merken (Topologie) gibt es folgende Regel: Auf der niederohmigen Seite beginnt das APNW
mit einer Seriereaktanz (und auf der hochohmigen Seite mit einer Parallelreaktanz).
{Aufg4-90}
aet/nik
4 Harmonische Zeitabhängigkeit
128
Leistungsanpassung bei komplexer Quellenimpedanz
Die Quelle besitzt nun eine komplexe Quellenimpedanz (mit Real- und Imaginärteil). Bei welcher
Lastimpedanz gibt die Quelle ihre maximale Leistung ab, und wie gross ist diese verfügbare Leistung? Figur 4-45 zeigt die Anordnung mit Quelle und Last.
Zq
I
Z q = Rq + j X q
Uq
PL
ZL
Z L = RL + j X L
Figur 4-45: Quelle mit komplexer Quellen- und Lastimpedanz
b g
Die Leistung PL berechnet sich zu:
PL = I 2 ⋅ Re Z L = I 2 ⋅ RL
Für den Strom I erhält man:
I=
und
Uq
Zq + Z L
2
I =
=
Uq
d
Rq + RL + j ⋅ X q + X L
Uq
2
dR + R i + d X
2
q
i
L
q
+ XL
i
+ XL
i
2
2
Eingesetzt in die Formel für PL:
PL =
U q ⋅ RL
dR + R i + d X
2
q
L
q
2
Für das Maximum von PL bildet man die partiellen Ableitungen und setzt diese Null:
∂PL
∂PL
= 0 und
=0
∂RL
∂X L
Die Lösungen dieser zwei Gleichungen ergeben je eine Bedingung für RL und XL:
X L = − Xq
RL = R q
U|
V|
W
Z L = Zq
*
(4.74)
Setzt man (4.74) in der Formel für die Leistung ein, so erhält man für die maximale Leistung in
der Last (verfügbare Leistung):
PAV =
Uq
2
4 ⋅ Rq
=
Uq
2
c h
4 ⋅ Re Z q
(4.75)
aet/nik
4 Harmonische Zeitabhängigkeit
129
*
Die Bedingung Z L = Z q bezeichnet man als Leistungsanpassung (im Gegensatz zur sog. Wellen-
anpassung). Bei der Leistungsanpassung muss die Lastimpedanz also zwei Bedingungen erfüllen,
nämlich die beiden Gleichungen für Realteil und Imaginärteil. Für die Praxis bedeutet dies zwei
Freiheitsgrade (Abstimmelemente) zur Erfüllung von (4.74).
{Aufg4-91 ... Aufg4-94}
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
130
5 PERIODISCHE ZEITFUNKTIONEN UND FOURIERREIHE
5.1 Einführung
Im Kapitel 4 hat sich gezeigt, dass die komplexe Methode (Zeigerrechnung, „Frequenzbereich“) ein
äusserst wirksames Werkzeug ist zur Behandlung von Netzwerken und Systemen bei harmonischer
Zeitabhängigkeit. Ist die Zeitabhängigkeit nicht harmonisch, so bleibt bis jetzt nur die Behandlung
der Netzwerke im Zeitbereich (Differentialgleichungen). Glücklicherweise existieren aber Methoden und Werkzeuge, um auch bei beliebiger Zeitabhängigkeit, dem Zeitbereich (fast) immer auszuweichen. Die folgende Zusammenstellung gibt eine kurze Übersicht der wichtigsten „Ingenieurmethoden“ für lineare Systeme (Superposition):
Methode, Werkzeug
Anwendung
Bemerkungen
Differentialgleichung (DGL)
immer
universellste Systembeschreibung
Zeigerrechnung, komplexe Methode
harmonische Zeitabhängigkeit
optimal für „einwellige“ Zeitabhängigkeit
Fourierreihe
periodische Zeitabhängigkeit
„mehrwellige“ Zeitabhängigkeit
(Spektrumsbegriff)
Fouriertransformation
„beliebige“ Zeitabhängigkeit
physikalische Interpretation des Spektrums
(Frequenzbereich)
Laplacetransformation
„beliebige“ Zeitabhängigkeit
speziell geeignet für transiente Vorgänge
(t>0), keine physikalische Interpretation des
„Laplace-Spektrums“
In diesem Kapitel wird die Fourierreihe eingeführt (als Spezialfall einer orthonormierten Basis) und
an ausgewählten Beispielen demonstriert. Dabei werden zuerst einige Begriffe aus der Vektorgeometrie repetiert und im Zusammenhang mit (orthogonalen) Funktionen als bildhafte Gedankenstützen benutzt.
5.1.1 Vektordarstellung und Skalarprodukt
b
g
H
Aufg5-1: Ein Vektor im Raum ist gegeben mit: v1 = 5 / −3 / 2 . Der Vektor soll in einem neuen
Koordinatensystem dargestellt werden. Die neuen „Koordinatenachsen“ lauten:
1
1
1
H
H
H
1 / 1 / 1 , e2 =
−2 / 1 / 1 und e3 =
0 / −3 / 3
e1 =
3
6
18
H H
H
- Zeigen Sie, dass e1 , e2 und e3 eine orthonormierte Basis bilden
H
- Stellen Sie den Vektor v1 im neuen Koordinatensystem dar, d.h. die Werte von k1, k2 und k3 sind
H
H
H
H
so zu bestimmen, dass gilt: v1 = k1 ⋅ e1 + k 2 ⋅ e2 + k 3 ⋅ e3
b
g
b
g
b
g
Im obigen Beispiel werden die Komponenten eines Vektors durch Bildung des Skalarprodukts
zwischen dem Vektor und den entsprechenden Einheitsvektoren berechnet. Diese (einfache) Art der
Berechnung ist nur zulässig, wenn alle Basisvektoren senkrecht (orthogonal) zueinander stehen.
Es ist leicht zu sehen, dass diese Berechnungsart (Projektion = „Skalarprodukt“) auf beliebig viele
Dimensionen ausgedehnt werden kann. Die wichtigen Formeln dazu lauten:
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
131
n
H
H
H
H
H
v = k1 ⋅ e1 + k2 ⋅ e2 + ... + k n ⋅ en = å ki ⋅ ei
(5.1)
i =1
r
r r r bi
ki = v o ei = v o r
bi
mit:
H
v:
ki :
H
ei :
H
bi :
(5.2)
n-dim. Vektor, dessen Komponenten zu bestimmen sind
i-te Komponente des Vektors
Einheitsvektor in i-te Richtung (Länge = 1)
Koordinatenvektor in i-te Richtung (Länge ≠ 1)
wobei alle Einheitsvektoren senkrecht aufeinander stehen:
r r
ei o e j =
RS 0,
T 1,
i≠ j
i= j
H
Die n senkrecht stehenden Vektoren ei mit der Länge Eins bezeichnet man als orthonormierte Basisvektoren, oder kurz als orthonormierte Basis.
5.1.2 Orthogonalitätsbegriff für Funktionen
Auch für Funktionen wird der Begriff orthogonal definiert. Wie soll man sich „senkrecht stehende“
Funktionen vorstellen? Die Definition und die Vorstellung sind angelehnt an die Begriffe aus der
Vektorgeometrie: man definiert für Funktionen ein „Skalarprodukt“ (Projektion) wie folgt:
z
b
S12 = f 1 o f 2 =
a
f 1 (t ) ⋅ f 2 (t )dt
(5.3)
Für S12 = 0 sagt man: f1(t) und f2(t) stehen orthogonal aufeinander (im Intervall [a, b])
Die Mathematik kennt (fast) beliebig viele Funktionen(gruppen), die (innerhalb der Gruppe) orthogonal zueinander stehen. Solche Basisfunktionen können dazu verwendet werden, eine gegebene
Funktion „in einem anderen Koordinatensystem darzustellen“. Im Unterschied zur Vektorgeometrie
weist dieses „Koordinatensystem“ ∞-viele Dimensionen auf. Je nach Problemstellung (Art der
DGL) wählt der Physiker, Ingenieur oder Mathematiker ein geeignetes „Koordinatensystem“ zur
Beschreibung seines Problems aus und „transformiert“ die Problemstellung (Funktionen) in das
gewählte „Koordinatensystem“. Bei „optimaler“ Wahl des „Koordinatensystems“ wird die Lösung
des Problems im „neuen Koordinatensystem“ einfacher als im „Originalkoordinatensystem“.
Einige solche orthogonalen Basisfunktionen sind z.B. (mit Angabe des Intervalls [a, b]):
- Legendre-Polynome
[-1, 1]
- Hermit-Polynome
[-∞, ∞]
- Laguerre-Polynome
[0, ∞]
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
132
- Tschebyscheff-Polynome [-1, 1]
- Bessel-Funktionen
[0, 1]
- Sin- und Cos-Funktionen [-π, π]
Siehe auch zusätzlich abgegebene Blätter (orthogonale Basisfunktionen) und Übung aet 5-1. Die
Darstellung (Entwicklung, Approximation) einer Funktion mit Hilfe der orthogonalen Basisfunktionen geschieht analog zur Vektorgeometrie mit (5.1) und (5.2):
f ( x ) = a0 ⋅ P0 ( x ) + a1 ⋅ P1 ( x ) + a2 ⋅ P2 ( x ) + ...
z
b
ak =
1
⋅ f ( x ) ⋅ Pk ( x )dx
N a
(5.4)
Dabei stellen die Funktionen Pk(x) die orthogonale Basis dar, für die gilt:
z
b
a
Pi ( x ) ⋅ Pj ( x ) =
RS 0,
T N,
i≠ j
i= j
(5.5)
Der Faktor N dient zur Normierung der „Vektorlänge“ (analog Einheitsvektor).
Mit (5.4) wird also die Funktion f(x) mit Hilfe der orthonormierten Basis Pk(x) dargestellt. Man
kann (5.4) auch als Approximation der Funktion f(x) auffassen, vor allem für die Fälle, wo die
Summe in (5.4) nur eine endliche Anzahl Summanden aufweist.
Die Werte ak können als Gewichtungsfaktoren aufgefasst werden, die angeben,
wie „stark Pk(x) in f(x) enthalten ist“.
Das Auffinden der „optimalen“ Basisfunktionen (Koordinatensystem) bei gegebener Differentialgleichung ist nicht Thema dieses Skripts, hier wird auf die Mathematik verwiesen (→ Eigenfunktionen).
Für den Elektroingenieur stellt die Fourierreihendarstellung (später: Fouriertransformation) ein äusserst wichtiges „Koordinatensystem“ zur Darstellung von periodischen Signalen dar.
Bei der Signaldarstellung mit der Fourierreihe werden die harmonischen Funktionen (sin- und cosFunktion) als Basisfunktionen verwendet. [Die harmonischen Funktionen sind als Basisfunktionen
geeignet, weil sie die Eigenfunktionen der Differentialgleichungen linearer Systeme/Netzwerke
sind]. Man projiziert die Funktion (Signal) also auf die harmonischen Funktionen und bestimmt so
die Gewichtungsfaktoren (ak und bk). Die graphische Darstellung der Gewichtungsfaktoren (in
Funktion von k) bezeichnet man dann als Spektren (cos-Spektrum, sin-Spektrum, Amplitudenspektrum, Phasenspektrum). Dieses sog. Spektrum enthält (für den Ingenieur) wichtige Informationen
über die „im Signal enthaltenen Frequenzanteile“.
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
133
5.1.3 Sin- und Cos-Funktion(en) als Beispiel einer orthogonalen Basis
Es werden die Funktionen cos( x ), cos(2 x ), cos(3x ), ... usw. betrachtet. Berechnen Sie folgende
Integrale:
z
π
Sij = cos(ix ) ⋅ cos( jx )dx , i , j ∈ N, i , j ≠ 0
−π
Zeigen Sie, dass die Funktionen Cn = cos(n ⋅ x ), n ∈ N eine orthogonale Basis bilden. Bestimmen
Sie auch den Normierungsfaktor N aus (5.5).
Es sei Sn = sin( n ⋅ x ), n ∈ N . Bilden diese Funktionen auch eine orthogonale Basis? Wieso genügen
Cn allein, (oder Sn allein) nicht als Basisfunktionen für eine beliebige 2π-periodische Funktion?
Aufg5-2: Die folgende Summe Hn ist für verschiedene n auszuwerten:
i +1
n
−1 ⋅ sin(ix )
sin( x ) sin(2 x ) sin(3x ) sin(4 x )
Hn ( x ) =
−
+
−
+ ... = å
1
2
3
4
i
i =1
b g
- Skizzieren Sie Hn(x) für verschiedene n (z.B. n = 3, 10, 50, 500) mit Hilfe von Matlab
- Welche Funktion f(x) wird wahrscheinlich durch die Summe Hn(x) dargestellt (approximiert)?
5.2 Definitionen und Beispiele
5.2.1 Fourierreihe mit ak und bk
Im vorherigen Kapitel wurde diskutiert, weshalb beide Funktionengruppen sin(nx) und cos(nx) zur
Darstellung von (beliebigen) 2π-periodischen „Signalen“ nötig sind. Für eine 2π-periodische
Funktion g(x) wird die Fourierreihe wie folgt angesetzt:
g( x) =
a0
+
2
∞
åa
k =1
∞
k
⋅ cos( kx ) + å bk ⋅ sin( kx )
k =1
Für eine Zeitfunktion mit beliebiger Periodendauer T schreibt man:
f (t ) =
a0
+
2
∞
∞
k =1
k =1
å ak ⋅ cos( kω 1t ) + å bk ⋅ sin( kω 1t ),
mit ω 1 =
2π
T
(5.6)
mit:
z
z
T
2
a k = ⋅ f (t ) cos( kω 1t )dt , k = 0, 1, 2, 3,...
T 0
T
bk =
2
⋅ f (t ) sin( kω 1t )dt ,
T 0
k = 1, 2, 3,...
LM a = 1 ⋅ f (t )dt = lin.Mittelwert OP
N2 T z
Q
T
0
0
(5.7)
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
134
Die Summe über ak⋅cos(..) steht für geraden Anteil und die Summe über bk⋅sin(..) für den ungeraden Anteil der Funktion f(t). Damit ist auch klar, dass bestimmte Symmetrieeigenschaften von
f(t) dazu führen, dass gewisse Terme in der Fourierreihe Null werden (verschwinden, nicht vorkommen). Der Summand a0/2 stellt den linearen Mittelwert von f(t) dar; die Schreibweise mit a0/2
ist üblich, weil dann eine Formel für alle ak genügt (siehe auch (5.7)).
Den Summanden mit der Frequenz ω1 bezeichnet man als Grundschwingung oder 1. Harmonische. Analog erhalten die Summanden mit höherer Frequenz eine entsprechende Bezeichnung:
1⋅ω1:
2⋅ω1 = ω2:
3⋅ω1 = ω3:
4⋅ω1 = ω4:
i⋅ω1 = ωi:
1. Harmonische
2. Harmonische,
3. Harmonische,
4. Harmonische,
i-te Harmonische,
Grundfrequenz, Grundschwingung, (Grundwelle)
1. Oberschwingung, (1. Oberwelle)
2. Oberschwingung
3. Oberschwingung
(i-1)-te Oberschwingung
Die (bestimmten) Integrale in (5.7) müssen über eine Periodendauer T gebildet werden, dabei darf
das Intervall beliebig verschoben werden, also z.B. [c, c+T]. Die Werte ak und bk bezeichnet man
als Fourierkoeffizienten.
5.2.2 Ausgewählte Beispiele
Bsp5-1: Von der (symmetrischen) Rechteckfunktion sind die Fourierkoeffizienten ak und bk zu bestimmen (siehe Skizze).
Mathematische Beschreibung von f(t) (innerhalb
f(t)
einer Periode):
A
−T/2
0
T/2
t
T
f (t ) =
RS A,
T 0,
0≤t ≤T 2
T 2≤t ≤T
Als erster (wichtiger) Schritt muss der Funktionsverlauf (innerhalb einer Periode) analytisch beschrieben werden. Für die skizzierte Funktion ist die Beschreibung sehr einfach (siehe oben).
2. Berechnung von a0/2 (Mittelwert):
Der lineare Mittelwert kann direkt aus der Skizze abgelesen werden und ergibt: a0/2 = A/2
3. Berechnung der ak:
Gemäss Definition (5.7) ergibt sich
z
z
T 2
T
z
T 2
T 2
2
2
2A
2π
2A T
2π
ak =
f (t ) cos( kω 1 t )dt =
A ⋅ cos( kω 1 t )dt =
cos( k
⋅
⋅ sin( k
t )dt =
t)
T0
T 0
T 0
T
T k ⋅ 2π
T 0
A
ak =
⋅ sin( kπ ) = 0, ( für k = 1, 2, 3,...)
kπ
Dieses Resultat kann auch ohne Rechnung direkt erklärt werden: Subtrahiert man von der Funktion
f(t) den linearen Mittelwert a0/2 (DC-Anteil wegnehmen), so erhält man eine ungerade Funktion.
Selbstverständlich enthält eine ungerade Funktion keine geraden Basisfunktionen, deshalb verschwinden alle ak ( k ≥ 1 ).
4. Berechnung der bk:
Gemäss Definition (5.7) ergibt sich
2
bk =
T
z
T
0
2
f (t ) sin( kω 1 t )dt =
T
z
T 2
0
2A
A ⋅ sin( kω 1 t )dt =
T
z
T 2
0
T 2
2π
2π
−2 A T
sin( k
⋅
⋅ cos( k
t )dt =
t)
T
T k ⋅ 2π
T 0
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
135
b g
−A
−A
k
⋅ cos( kπ ) − 1 =
⋅ −1 − 1 , für k = 1, 2, 3,...
kπ
kπ
Das Resultat kann weiter vereinfacht werden, wenn man für gerade und ungerade k unterscheidet:
2A
, k = ungerade, ( k = 1, 3, 5, 7,...)
bk = kπ
0 , k = gerade
bk =
R|
S|
T
5. Darstellung als Fourierreihe:
Setzt man a0/2, ak und bk in (5.6) ein, so erhält man die Funktion f(t) als Fourierreihendarstellung:
f (t ) =
OP
Q
LM
N
A 2 A sin(ω 1t ) sin( 3ω 1t ) sin(5ω 1t )
+
⋅
+
+
+ ... ,
2 π
1
3
5
mit ω 1 =
2π
T
Aufg5-3: Vollziehen Sie obige Berechnungen mit Maple nach. Verwenden Sie den assume-Befehl
(integer, even, odd) um die berechneten Fourierkoeffizienten möglichst einfach darzustellen.
Zeigen Sie (mit Hilfe von Matlab), wie obige Fourierreihe gegen die Rechteckfunktion konvergiert.
Was fällt Ihnen auf? Diskutieren Sie die Matlabplots.
Aufg5-4: Die skizzierte Spannung u1(t) soll mit einer Fourierreihe dargestellt werden. Geben Sie die
Fourierreihe von u1(t) an. Benützen Sie Erkenntnisse und Resultate von Bsp5-1.
u1(t)
U0
−0.5
0
0.5
1
U0 = 10 V
t [ms]
−U0
Bsp5-2: Vom skizzierten Strom iD(t) sind die Fourierkoeffizienten gesucht.
Ip
−T/2
iD(t)
T/2
t
−Ip
1. Mathematische Beschreibung:
4
I p ⋅ 1 + ⋅ t , −T 2 ≤ t ≤ 0
T
iD (t ) =
4
I p ⋅ 1− ⋅t , 0 ≤ t ≤ T 2
T
R|
|S
||
T
LM
N
LM
N
OP
Q
OP
Q
2. Berechnung von a0/2 (Mittelwert): iD(t) ist mittelwertfrei, d.h. a0/2 = 0
3. Berechnung der ak:
Gemäss Definition (5.7) ergibt sich
z
z
T 2
ak =
2
2
i D (t ) cos( kω 1 t )dt =
T −T 2
T
LM
MN
0
2
2π
=
cos( k
Ip
t )dt + I p
T
T
−T 2
z
T 2
0
LM
MN z
0
−T 2
I p ⋅ (1 +
4
2π
t ) ⋅ cos( k
t )dt +
T
T
2π
4
cos( k
t )dt + I p
T
T
z
0
z
T 2
0
I p ⋅ (1 −
4
2π
t ) ⋅ cos( k
t )dt
T
T
2π
4
t ⋅ cos( k
t )dt − I p
T
T
−T 2
z
T 2
0
t ⋅ cos( k
OP
PQ
2π
t )dt
T
OP
PQ
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
136
O
L 2π
2π
2π
2π
t ⋅ sin( k
t) P
t)
t ⋅ sin( k
t)
cos( k
8 ⋅ I M cos( k T t )
T
T
T
PP
M
a =
+
−
−
π
π
π
π
2
2
2
2
T M (k
k
k
(k
)
PQ
MN T )
T
T
T
O
L
8 ⋅ I M 2 − 2 ⋅ cos( kπ ) P 4 ⋅ I 1 − b −1g
=
PP = π ⋅ k , k = 1, 2, 3,...
M
T M ( k 2π )
N T Q
Das Resultat kann weiter vereinfacht werden, wenn man für gerade und ungerade k unterscheidet:
R| 8I , k = ungerade, (k = 1, 3, 5, 7,...)
a = Sπ k
|T 0 , k = gerade
0
0
T 2
T 2
0
0
p
k
2
2
2
−T 2
−T 2
k
p
p
2
2
2
2
p
k
2
2
4. Berechnung der bk: iD(t) ist eine gerade Funktion (siehe Skizze), also werden alle bk = 0.
5. Darstellung als Fourierreihe:
Für den Strom iD(t) als Fourierreihendarstellung erhält man:
iD (t ) =
8I p
π
2
⋅
LM cos(ω t ) + cos(3ω t ) + cos(5ω t ) + ...OP,
3
5
N 1
Q
1
1
2
1
2
2
mit ω 1 =
2π
T
i D (t ) ≈ I p ⋅ 0.8106 cos(ω 1t ) + 0.0901 cos(3ω 1t ) + 0.0324 cos(5ω 1t ) + 0.0165 cos(7ω 1t ) + ...
Man beachte, wie bei diesem dreieckförmigen Stromverlauf die Fourierkoeffizienten mit k2 abnehmen.
Aufg5-5: Vollziehen Sie obige Berechnungen mit Maple nach. Zeigen Sie (mit Hilfe von Matlab),
wie obige Fourierreihe konvergiert. Was fällt Ihnen auf? Diskutieren Sie die Matlabplots.
5.2.3 Fourierreihe mit Ak und ϕk
Eine Überlagerung harmonischer Schwingungen gleicher Frequenz kann immer als eine harmonische Schwingung (mit Phasenverschiebung) dargestellt werden. So werden in der Fourierreihe
Summanden mit gleicher Frequenz zusammengefasst:
ak cos( kω 1t ) + bk sin( kω 1t ) = Ak cos( kω 1t + ϕ k )
2
Ak = ak + bk
2
und ϕ k =
RS− arctan(b
T− arctan(b
ak > 0
k
ak ),
k
ak ) + π , ak < 0
Damit schreibt man für die Fourierreihe:
f (t ) =
A0 ∞
A a
2π
+ å Ak ⋅ cos( kω 1t + ϕ k ), mit 0 = 0 und ω1 =
T
2 k =1
2
2
Ak: Amplituden (der Harmonischen)
ϕk: Phasen (der Harmonischen)
(5.8)
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
137
Für den Ingenieur ist (5.8) die wichtige Darstellung der Fourierreihe (mit Amplituden und Phasen).
Bei der Berechnung der Fourierkoeffizienten kommt zusätzlich die Umrechnung auf Ak, ϕk dazu.
Die graphische Darstellung von Ak bezeichnet man als Amplitudenspektrum, die graphische Darstellung der ϕk bezeichnet man als Phasenspektrum.
Bsp5-3: Von der skizzierten Spannung sind die Fourierkoeffizienten zu berechnen. Amplitudenund Phasenspektrum sind zu skizzieren.
u(t)
U0
0
T/2
U0 = 10 V
T = 5 ms
t
T
Der Funktionsverlauf weist (leider) keine Symmetrien auf, so dass sowohl ak wie bk berechnet werden müssen.
2U 0
u( t ) =
t, 0 ≤ t ≤ T 2
[u(t ) = 0, T 2 ≤ t ≤ T ]
1. Mathematische Beschreibung:
T
2. Berechnung von A0/2 (Linearer Mittelwert): A0 2 = a0 2 = u( t ) = U 0 4
3. Berechnung der ak:
z
z
T 2
T
ak =
ak =
2
2 2U
u(t ) cos( kω 1t )dt = ⋅ 0
T0
T T
b g
t cos( k
0
2π
4U
t )dt = 20
T
T
U 0 −1 − 1
⋅
π2
k2
2
ak
R| − 2U
=S π k
|T 0,
2
4. Berechnung der bk:
z
T
2
2 2U
u(t ) sin( kω 1t )dt = ⋅ 0
T0
T T
bk = −
T 2
0
k
Unterscheidet man für gerade und ungerade k:
bk =
LM cos(k 2π t ) t sin(k 2π t ) OP
MM (k 2πT) + k 2πT PP
T
N T
Q
b g
U 0 −1
⋅
π
k
z
T 2
0
t sin( k
2π
4U
t )dt = 20
T
T
0
2
, k = 1, 3, 5,...
k = gerade
LM sin(k 2π t ) t cos(k 2π t ) OP
MM ( k 2πT) − k 2πT PP
T
N T
Q
T 2
2
0
k
5. Umrechnung auf Ak und ϕk:
mit Ak = ak 2 + bk 2 , ϕ k = − arctan( bk ak ) ergibt sich:
R| U 1 + 4
| πk π k
A =S
|| U ,
T πk
0
2
2
, k = 1, 3, 5,...
k
0
k = gerade
ϕk =
RS arctan(kπ 2) − π ,
T π 2,
k = 1, 3, 5,...
k = gerade
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
138
Die num. Werte der ersten sieben Fourierkoeffizienten sind untenstehend tabelliert:
k
ωk [s-1]
ak [V]
bk [V]
Ak [V]
ϕk [rad]
1
2
3
4
5
6
7
2π ⋅ 200
2π ⋅ 400
2π ⋅ 600
2π ⋅ 800
2π ⋅ 1000
2π ⋅ 1200
2π ⋅ 1400
–2.0264
0
–0.2252
0
–0.0811
0
–0.0414
3.1831
–1.5915
1.0610
–0.7958
0.6366
–0.5305
0.4547
3.7734
1.5915
1.0847
0.7958
0.6418
0.5305
0.4566
–2.1377
π/2
–1.7799
π/2
–1.6974
π/2
–1.6615
Die Fourierreihendarstellung von u(t) ergibt jetzt (mit Amplituden und Phasen):
∞
u( t ) = A0 2 + å Ak cos(ω k t + ϕ k )
k =1
u(t ) ≈ 2.5 + 3.7734 cos(2π ⋅ 200 t − 2.1377) + 15915
.
cos(2π ⋅ 400 t + π 2) + ...
Figur 5-1 zeigt das Amplituden- und Phasenspektrum der Spannung u(t).
Amplitudenspektrum
A(k) [V]
4
3
2
1
0
0
5
10
15
10
15
Phasenspektrum
2
Phi(k) [rad]
k
0
-2
-4
0
5
k
Figur 5-1: Amplituden- und Phasenspektrum zu Bsp5-3
Diese beiden Spektren geben an, welche Frequenzkomponente wie stark im Signal vorkommt.
Die „k-Achse“ kann auch als ω-Achse angeschrieben werden (ωk = k⋅ω1). Der Ingenieur bezeichnet
dann obige Darstellung mit:
Die Spannung u(t) ist im Frequenzbereich dargestellt
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
139
Damit steht jetzt (zusätzlich zum Zeitbereich) auch der Frequenzbereich (Frequenzebene, Spektrum) zur Signaldarstellung zur Verfügung (wenigstens für periodische Signale). Im Frequenzbereich liest man ab, welche spektralen Komponenten (harmonische Basisfunktionen) wie stark im
Signal vorhanden sind. Auch im Frequenzbereich stehen Messgeräte zur Verfügung, die die Informationen von Figur 5-1 auf einem Bildschirm darstellen (Spekrumanalysator).
Für ein paar typische Signalformen sind folgend die Signaldarstellungen (qualitativ) im Zeitbereich und im Frequenzbereich gezeigt, dabei wird im Frequenzbereich nur das Amplitudenspektrum (die ersten 15 Harmonischen) angegeben (ohne Phaseninformation).
„Zeitbereich“
„Frequenzbereich“
2
1
1
0.8
0
0.6
0.4
-1
-2
-10
0.2
-5
0
5
10
2
0
0
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
1.5
1
1
0
0.5
-1
-2
0
5
10
15
20
2
1
0.8
1
0.6
0
0.4
-1
-2
0
0
0
0.2
5
10
15
20
0
0
2
0.8
1
0.6
0
0.4
-1
0.2
-2
0
5
10
15
20
0
0
1.5
0.5
1
0.4
0.5
0.3
0.2
0
-0.5
0
0.1
5
10
15
20
0
0
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
140
5.3 Anwendungen
5.3.1 Effektivwert (Leistung) bei mehrwelligen Zeitfunktionen
Die Darstellung einer (periodischen) Funktion mit der Fourierreihe kann auch als Überlagerung
mehrerer Schwingungen unterschiedlicher Frequenz aufgefasst werden. Der Effektivwert jeder
einzelnen Schwingung erhält man leicht durch Division der Amplituden mit 2 . (Beachte: Keine
Division durch 2 bei a0/2 → DC-Anteil). Der „gesamte Effektivwert“ ergibt sich dann durch die
(früher hergeleitete) Formel für eine Überlagerung von Schwingungen unterschiedlicher Frequenzen. Ist die Fourierreihe gegeben mit:
∞
x ( t ) = A0 2 + å Ak cos( kω 1t + ϕ k ) ,
k =1
Ak
(für k > 0).
2
Für den Effektivwert der „Fourierreihe“ erhält man:
so sind die einzelnen Effektivwerte
X = X eff =
A02
+
4
FAI
å GH 2 JK
∞
k
2
A02 1
+
4
2
=
k =1
∞
å
Ak
k =1
2
(5.9)
Bsp5-4: Als Beispiel soll der Effektivwert der skizzierten Rechteckfunktion berechnet werden. In
Bsp5-1 wurde die Fourierreihe hergeleitet mit:
f(t)
A
−T/2
0
T/2
f (t ) =
t
T
OP
Q
LM
N
A 2 A sin(ω 1t ) sin( 3ω 1t ) sin(5ω 1t )
+
⋅
+
+
+ ...
2 π
1
3
5
Berechnet man den Effektivwert gemäss (5.9), so ergibt sich:
2
Feff =
LM
N
LM OP
N Q
OP
Q
A 2 4 A2 1 1 1 1
A2 4 A2 π 2
A2
+
+
+
+
+
...
=
+
=
,
4 2π 2 12"""
32 "52 """"
7 2 ! 4 2π 2 8
2
π2 8
Feff =
und
A
2
Das Resultat kann (leicht) mit der skizzierten Zeitfunktion verifiziert werden.
Bsp5-5: Vom dreieckförmigen Strom iD(t) soll der Effektivwert berechnet werden. Die zugehörige
Fourierreihe wurde schon in Bsp5-2 berechnet:
Ip
−T/2
iD(t)
T/2
t
−Ip
iD (t ) =
8I p
π
2
⋅
LM cos(ω t ) + cos(3ω t ) + cos(5ω t ) + ...OP
3
5
N 1
Q
1
2
1
2
1
2
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
Die Berechnung des Effektivwertes ergibt:
2
2
64 I p
Ip
1 1 1 1
2
2
I Deff = I D = 4 ⋅ 4 + 4 + 4 + 4 + ... =
, und damit
π ⋅2 1 """
3 "5 """"
7
3
!
LM
N
OP
Q
I Deff =
141
Ip
3
π 4 96
5.3.2 Klirrfaktor
In der Nachrichtentechnik und Signalverarbeitung wird der sog. Klirrfaktor als Mass für nichtlineare Verzerrungen verwendet. Dabei geht man von folgender Anordnung aus:
x(t)
y(t)
System
Figur 5-2: Anordnung zur Definition des Klirrfaktors
Das Eingangssignal x(t) ist eine (reine) harmonische Schwingung. Das (nichtlinear verzerrte) Ausgangssignal y(t) enthält jetzt zusätzlich Oberschwingungen. Ein Mass für die (Nichtlinearität) Verzerrungen des Systems ist der Klirrfaktor k. Er wird wie folgt definiert (mit dem Ausgangssignal):
k2 =
Leistung der Oberschwingungen
Gesamtleistung (ohne DC − Anteil)
Ist die Fourierreihe des Ausgangssignals y(t) bekannt mit: y( t ) =
(5.10)
A0 ∞
+ å Ak cos( kω 1t + ϕ k ) , so be2 k =1
rechnet sich der Klirrfaktor k zu:
∞
åA
2
åA
2
k
k=
k =2
∞
(5.11)
k
k =1
{Aufg5-6 ... Aufg5-11}
5.3.3 Zeigerrechnung für mehrwellige Zeitfunktionen
Die Methode soll an folgender Problemstellung demonstriert werden: Eine periodische Spannung
u1(t) ist als Eingangsspannung an einem CR-Netzwerk gegeben (Figur 5-3). Die Ausgangsspannung
u2(t) ist zu berechnen. Dabei interessiert nur der eingeschwungene Zustand, d.h. der Beobachtungszeitpunkt ist weit weg vom Einschaltzeitpunkt (transienter Vorgang ist abgeschlossen).
C
u1(t)
R
u2(t) = ?
Figur 5-3: Periodische Spannung an CR-Netzwerk
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
142
Die klassische (Lösungs-) Methode benutzt die Differentialgleichung und löst das Problem vollständig im Zeitbereich (siehe auch Aufg3-28, Seite 86).
Von obigem Netzwerk ist die Übertragungsfunktion (UTF) leicht anzugeben. Diese UTF
lässt sich aber nur für harmonische Zeitabhängigkeit verwenden. Mit Hilfe der Fourierreihe wird
jetzt das folgende Lösungskonzept verfolgt (lineares System → Superposition):
Periodisches Eingangssignal
Zerlegung in Summe von
harmonischen Schwingungen
(Fourierreihendarstellung)
Zeigerdarstellung der harmonischen
Schwingungen (∞-viele Zeiger)
Fourierreihendarstellung des
Ausgangssignals
Berechnung des Ausgangssignals im „Frequenzbereich“
(∞-viele Zeiger) mit Hilfe der Übertragungsfunktion
Periodisches Ausgangssignal
Die Berechnung im Frequenzbereich wird dadurch erschwert, dass ∞-viele Zeiger berücksichtigt
werden müssten. Da aber alle Signale/Systeme in der Praxis bandbegrenzt sind, verwendet man so
viele Frequenzkomponenten wie nötig.
U
Die Übertragungsfunktion vom skizzierten Netzwerk (Figur 5-3) heisst: H (ω ) = 2
U1
Die Eingangsspannung wird als Fourierreihe dargestellt (ohne DC-Anteil):
∞
∞
k =1
k =1
u1( t ) = å Ak ⋅ cos( kω 1t + ϕ 1k ) = å kU1 ⋅ cos( kω 1t + kϕ 1 )
mit der neuen Schreibweise: kU1 : k-te Komponente von u1 (Spitzenwert)
Obige Summanden werden einzeln (nicht als Summe) in den Frequenzbereich transformiert:
k
k
U 1 ⋅ cos( kω 1t + kϕ 1 )
k
U 1
k
∠ϕ 1k = k U 1 ∠ kϕ 1 = U 1
2
U 1 : k-ter Zeiger (von u1)
Der „Hochindex“ k bei k U 1 gibt an, zu welcher Frequenz kω 1 der zugehörige Zeiger (komplexe
Zahl) gehört.
Die (periodische) Spannung u1(t) wird damit im Frequenzbereich durch ∞-viele komplexe Zeiger
repräsentiert:
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
143
R| U
|S U
|| U
T ...
1
1
2
u1(t)
1
3
1
Jeder dieser komplexer Zeiger repräsentiert eine harmonische Zeitfunktion im Eingangssignal u1(t).
Nun wird jeder Zeiger einzeln mit der Übertragungsfunktion H (bei der entsprechenden Frequenz)
multipliziert und somit die Zeiger der Ausgangsspannung berechnet:
k
U 2 = H ( kω 1 ) ⋅ k U 1
(5.12)
„Rücktransformation“ aller Zeiger liefert die Fourierreihe der Ausgangsspannung u2(t):
1
U|
U |
V
U |
... |W
U2
2
2
3
u2(t)
2
Setzt man H ( kω 1 ) = H ( kω 1 ) ∠ϕ H ( kω 1 ) ein, so kann die Fourierreihe von u2(t) direkt notiert werden mit:
∞
u2 (t ) = å kU1 ⋅ H ( kω 1 ) ⋅ cos( kω 1t + kϕ 1 + ϕ H ( kω 1 ))
k =1
(5.13)
Bsp5-5: Die Methode soll am Beispiel von Figur 5-3 vorgeführt werden. Die Fourierreihe von u1(t)
lautet:
2U sin(ω 1t ) sin(2ω 1t ) sin(3ω 1t ) sin(4ω 1t )
⋅
−
+
−
+ ...
u1 (t ) =
π
1
2
3
4
2U
k π
in Zeigerdarstellung: k U 1 =
∠ −1
2
2π k
jω τ
Die Übertragungsfunktion des CR-Gliedes ergibt: H (ω ) =
, mit τ = RC
1 + jω τ
ωτ
Betrag und Phase davon sind: H (ω ) =
, ϕ H (ω ) = π 2 − arctan(ω τ )
1 + (ω τ ) 2
Die Zeiger der Ausgangsspannung sind:
kω 1τ
2U
k π
k
k
U 2 = H ( kω 1 ) ⋅ U 1 =
∠ −1
∠ π 2 − arctan( kω 1τ ) ⋅
2
2π k
1 + ( kω 1τ ) 2
LM
N
OP
Q
b g
LM
MN
OP L
PQ MMN
b g OPP
Q
aet/nik
k
U2 =
5 Periodische Zeitfunktionen und Fourierreihe
2Uω 1τ
π 2 1 + ( kω 1τ )
2
∠
144
π
π
k
⋅ −1 + − arctan( kω 1τ )
2
2
b g
Setzt man den letzten Ausdruck in die Fourierreihe für u2(t) ein, so erhält man:
2Uω 1τ
u2 (t ) =
⋅
π
∞
å
c
h
cos kω 1t + π 2 ⋅ 1 + ( −1) k − arctan( kω 1τ )
k =1
1 + ( kω 1τ ) 2
Aufg5-13: Werten Sie das obige Beispiel numerisch mit Matlab aus. Verwenden Sie dazu die Zahlenwerte: Û = 20 V, T = 2ms (ω1 = 2π⋅500 s–1). Machen Sie Plots für τ = 0.02 s, τ = 200 µs und τ =
20 µs. (Verwenden Sie etwa 100 Summanden in der Fourierreihe). Können Sie die Signalverläufe
plausibel erklären? Wie wirkt das CR-Netzwerk auf die Sägezahnspannung ein?
Mittlere Leistung P, wenn u(t) und i(t) als Fourierreihe vorliegen
Strom und Spannung sind beide als Fourierreihendarstellung gegeben (periodische Funktionen, mit
gleicher Frequenz der Grundschwingung):
∞
u(t ) = U DC + å 2 ⋅ k U ⋅ cos( kω 1t + kϕ u )
k =1
∞
i (t ) = I DC + å 2 ⋅ k I ⋅ cos( kω 1t + kϕ i )
k =1
Die Momentanleistung ist definiert als Produkt von Strom und Spannung. Der lineare Mittelwert
der Momentanleistung ist nun zu berechnen:
LM
N
∞
OP LM
QN
∞
OP
Q
P = p(t ) = u(t ) ⋅ i (t ) = U DC + å 2 ⋅ k U ⋅ cos( kω 1t + kϕ u ) ⋅ I DC + å 2 ⋅ k I ⋅ cos( kω 1t + kϕ i )
k =1
∞
k =1
Σ .Σ
∞
= U DC ⋅ I DC + U DC ⋅ å 2 ⋅ k I ⋅ cos( kω 1t + kϕ i ) + I DC ⋅ å 2 ⋅ kU ⋅ cos( kω 1t + kϕu ) +
!
k =1
k =1
"""""
"""""!
"""""
" """"""
!
A
0
0
(Mittelung über eine Periode)
(Mittelung über eine Periode)
= U DC ⋅ I DC + A
Die (lineare) Mittelung über das Produkt der Summen ist noch zu untersuchen. Typische Summanden in A sind:
R|+ ......
|+ 2 ⋅
A=S
||+ 2 ⋅
T+ ......
k
I ⋅ 2 ⋅ k U ⋅ cos( kω 1t + kϕ i ) ⋅ cos( kω 1t + kϕ u ),
p=q=k
I ⋅ 2 ⋅ qU ⋅ cos( pω 1t + pϕ i ) ⋅ cos(qω 1t + qϕ u ),
p≠q
p
Das Resultat des Integrals über einen typischen Summanden hängt davon ab, ob es sich um den ersten Fall mit p = q = k oder den zweiten Fall mit p ≠ q handelt.
aet/nik
5 Periodische Zeitfunktionen und Fourierreihe
145
1. Fall ( p = q = k ):
cos( kω 1t + k ϕ i ) ⋅ cos( kω 1t + k ϕ u ) =
1
1
1
cos(2 kω 1t + k ϕ i + k ϕ u ) + cos( k ϕ i − k ϕ u ) = cos( k ϕ i − k ϕ u )
2 """" """"
2
2
!
0
2. Fall ( p ≠ q ):
cos( pω 1t + pϕ i ) ⋅ cos(qω 1t + qϕ u ) = 0
damit erhält man für A:
A=
∞
å 2⋅
m =1
1
I ⋅ mU ⋅ cos( m ϕ i − m ϕ u )
2
m
und für P:
∞
P = U DC ⋅ I DC + å mI ⋅ mU ⋅ cos( mϕ i − mϕ u )
m =1
(5.14)
Nur Ströme und Spannungen mit gleicher Frequenz ergeben einen Anteil bei der Berechnung der
mittleren Leistung. In der Summe von (5.14) stehen die „mittleren Leistungen pro Oberschwingung“ als Summanden.
aet/nik
7 Zweitore (2-Tore)
1
7 ZWEITORE (2-TORE)
7.1 Einführung
Ein Zweitor ist ein System mit zwei Zugängen („Tore“). An den Toren kann mit dem Äusseren z.B.
elektrische, optische, mechanische oder akustische Energie ausgetauscht werden. Einige Beispiele
sind:
Beispiel
Eingang
Ausgang
Glühlampe
elektrisch
optisch
Getriebe
mechanisch
mechanisch
Lautsprecher
elektrisch
akustisch
Mikrophon
akustisch
elektrisch
Elektromotor
elektrisch
mechanisch
Ein elektrisches Zweitor ist ein Spezialfall eines n-Tores, eines Netzwerkes mit n äusseren Zugängen.
2
3
1
Netzwerk
1
2
Netzwerk
1'
2'
Zweitor (2-Tor)
n
n-Tor
Figur 7-1: n-Tor und Zweitor
Aus früheren Kapiteln sind bereits einige Zweitore bekannt:
n:1
Figur 7-2: Bekannte 2-Tore: Transformator, Spannungsteiler, Brückenschaltung
____________________________________________________________________
Das Kapitel „Zweitore“ ist eine gekürzte Fassung aus G. Epprecht, „Technische Elektrizitätslehre III“,
Vorlesungsmanuskript ETHZ.
aet/nik
7 Zweitore (2-Tore)
2
Die Theorie der 2-Tore befasst sich allgemein mit den Beziehungen zwischen Ein- und Ausgangsgrössen und mit der Zusammenschaltung von mehreren 2-Toren zu zusammengesetzten Systemen.
Im folgenden werden fast nur Probleme der Analyse, kaum aber der Synthese behandelt.
Ferner soll es sich immer um proportionale 2-Tore handeln, welche sich unter den linearen dadurch auszeichnen, dass bei gleichzeitig beidseitigem Anschluss von passiven Impedanzen Za und
Zb alle Ströme und Spannungen am Ein- und Ausgang Null werden.
Für Ströme und Spannungen an 2-Toren sind internationale Zählrichtungen nach Figur 7-3
festgelegt.
Za
1
I2
I1
U1
Uq
1'
2
U2
Zb
2'
Figur 7-3: Bezeichnungen und Zählrichtungen am 2-Tor
Wir verwenden ferner an Ein- und Ausgangsseite die Indizes 1 und 2 für die zum 2-Tor gehörenden
Grössen und a bzw. b für Quelle und Last, d.h. für äussere Grössen.
7.2 Einteilung der 2-Tore
a)
aktiv - passiv
Passive 2-Tore sind solche, bei denen in keinem Betriebszustand mehr Leistung entnommen
werden kann, als eingespeist wird. Netzwerke, die nur aus R, L, C und M aufgebaut sind, sind
immer passiv. Aktive Zweitore müssen aktive Elemente wie Quellen oder negative Widerstände
enthalten. Diese beiden Sätze sind nicht umkehrbar.
Weder müssen alle passiven 2-Tore aus R, L, C und M realisierbar sein, noch sind alle 2Tore, die aktive Elemente enthalten, selbst aktiv. Ausserdem gibt ein aktives 2-Tor im allgemeinen nur in bestimmten Frequenzbereichen und unter bestimmten Betriebsbedingungen
Leistung nach aussen ab, so kann z.B. kein 2-Tor im Kurzschlusszustand Leistung abgeben.
Zwischen den aktiven und passiven stehen als Grenzfall die verlustlosen 2-Tore.
b)
reziprok - nichtreziprok
Die Reziprozität ist eine Übertragungssymmetrie. Sie hat nichts damit zu tun, ob das 2-Tor aktiv
oder passiv ist (Da die meisten, praktisch verwendeten passiven 2-Tore reziprok und viele aktive
[Verstärker] nicht reziprok sind, werden diese Begriffe oft vermengt und falsch angewendet.).
Speist man ein reziprokes 2-Tor aus einer Quelle mit dem Innenwiderstand Z0 und belastet
es am Ausgang mit der gleichen Impedanz Z0, so ist es für die Spannung, den Strom oder die
Leistung in der Last gleichgültig, in welcher Richtung das 2-Tor betrieben wird (Figur 7-4).
aet/nik
7 Zweitore (2-Tore)
Z0
Ia
2
Ua
U0
2
Ub
1'
~
Ib
~
Ia
Z0
Ib
1
3
1
~
Ua
Z0 U 0
2'
~
Ub
2'
erste Messung
Z0
1'
zweite Messung
Figur 7-4: Reziprozitätsversuch am 2-Tor
Ist das 2-Tor reziprok, so gilt also:
~
Ib = I b ,
~
Ub =Ub
(7.1)
Man beachte, dass am Eingangstor bei den zwei Messungen nach Figur 7-4 im allgemeinen verschiedene Spannungen und Ströme festgestellt werden:
~
Ia ≠ I a ,
~
Ua ≠Ua
Die Impedanz Z0 darf beliebig gewählt werden, insbesondere auch 0 und ∞.
Schaltungen, die nur R, L, C und M (oder allgemeinere Eintore) enthalten, sind immer reziprok.
Verstärker sind im allgemeinen nichtreziproke 2-Tore.
Nichtreziproke 2-Tore können nicht aus Eintoren realisiert werden, man benötigt gesteuerte
Quellen oder Gyratoren.
c)
Richtungssymmetrie
Ein 2-Tor wird als richtungssymmetrisch bezeichnet, wenn die beiden Tore elektrisch nicht unterschieden werden können. Dann bleiben beim Umdrehen des 2-Tores im Versuch nach Figur 7-4
auch die Eingangsgrössen unverändert.
~
Ia = I a ,
also:
~
Ua =Ua
~
(und weiterhin I b = I b ,
~
Ub =Ub )
Symmetrieebene
R1
R2
R1
1:1
a) Dämpfungsglied
b) Transformator
Figur 7-5: Beispiele von richtungssymmetrischen 2-Toren
d)
Erdsymmetrie
Bei einem erdsymmetrischen 2-Tor sind die beiden folgenden Betriebszustände von aussen nicht
unterscheidbar, (man nennt die Schaltung auch symmetriert).
aet/nik
7 Zweitore (2-Tore)
4
U12
Za
I1
1
U'12
2
U1
U0
Za
I2
U2
1'
I'1
1'
2'
U'1
Zb U 0
2'
I'2
U'2
Zb
2
1
Symmetrieebene
U'21
U21
Figur 7-6: symmetriertes oder erdsymmetrisches 2-Tor
U 12 = U '12 ,
(U 21 = U '21 )
In den Zweitormatrizen kommt die Erdsymmetrie nicht zum Ausdruck.
Beispiele zur Symmetrierung von 2-Toren
Z1
Z2
Z1/2
Z1/2
Z2
Z2
Z1
Z1/2
Z1/2
Figur 7-7: erdsymmetrisch und richtungssymmetrisch
Z1/2
Z2/2
Z3
Z1/2
Z2/2
Z1 ≠ Z 2
Figur 7-8: erdsymmetrisch, nicht richtungssymmetrisch
Z1
Z3
Z2
Z1 ≠ Z 3
Figur 7-9: nicht erdsymmetrisch, nicht richtungssymmetrisch
aet/nik
7 Zweitore (2-Tore)
5
7.3 2-Tor-Gleichungen und -matrizen
Den Betriebszustand eines Netzwerkes mit 4 äusseren Klemmen kann man durch 3 Ströme und 3
Spannungen charakterisieren. Die äusserlich messbaren Eigenschaften dieses Vierpoles wären
durch 3 Gleichungen und insgesamt 9 Koeffizienten bestimmt. In der üblichen Theorie der 2-Tore
behandelt man jedoch nicht diesen allgemeinen Fall, es werden nur die Grössen an den
Klemmenpaaren oder Toren 1-1´ und 2-2´ betrachtet.
U12
1
U1
I1
I2
I1'
I2'
2
U2
1'
2'
U1'2'
Figur 7-10: Ströme und Spannungen am 2-Tor und am allgemeinen Vierpol
Die Spannungen U12 und U1´2´ treten also in den Gleichungen nicht auf und man setzt I1 = I1´
(und dies bedingt auch I2 = I2´). Die Beziehungen zwischen den verbleibenden Grössen U1, I1, U2, I2
können durch 2 Gleichungen mit 4 Koeffizienten dargestellt werden.
2-Tor-Gleichungen in Impedanzform:
OP
U Q
U1
=
2
LMZ
NZ
11
Z12
21
Z 22
OP ⋅ I OP
QIQ
1
2
(7.2)
oder ausgeschrieben:
U 1 = Z11 I 1 + Z12 I 2
U 2 = Z 21 I 1 + Z 22 I 2
Die Matrix
Z =
LM Z
NZ
11
21
Z12
Z 22
OP
Q
wird Impedanzmatrix des 2-Tores genannt, sie legt die
„äusseren“ Eigenschaften der Schaltung vollständig fest.
2-Tor-Gleichungen in Admittanzform:
OP
I Q
I1
2
Y =
LMY
NY
11
21
OP
Q
Y 12
:
Y 22
=
LMY
NY
11
21
OP OP
Q Q
Y12 U 1
⋅
Y 22 U 2
2-Tor-Admittanzmatrix
(7.3)
aet/nik
7 Zweitore (2-Tore)
6
Impedanz- und Admittanzmatrix eines 2-Tores verknüpfen das Strompaar mit dem Spannungspaar.
Oft ist es zweckmässiger, die Eingangsgrössen U1, I1 in Funktion der Ausgangsgrössen U2, I2
darzustellen:
2-Tor-Gleichungen in Kettenform:
U1
I1
A =
LM A
NA
11
21
OP
Q
A12
:
A22
OP
Q
=
A⋅
OP
−I Q
U2
2
(7.4)
Kettenmatrix
Hauptsächlich in der Transistortechnik wird eine weitere 2-Tor-Matrix benützt, die Hybrid- oder
H-Matrix:
2-Tor-Gleichungen in Hybridform:
U1
I2
OP
Q
=
LM H
NH
11
H 12
21
H 22
OP ⋅ I OP
QUQ
1
2
(7.5)
Zusätzlich existieren die selten benutzten Serie-Parallel-Matrix [D] und Parallel-Serie-Matrix [C].
Es sei darauf hingewiesen, dass die Matrixelemente nur in der Z- und der Y-Matrix alle dieselbe
Dimension haben, in den anderen Matrizen sind sie teils Impedanzen, teils Admittanzen, teils dimensionslos.
aet/nik
7 Zweitore (2-Tore)
7
7.4 Umrechnung von 2-Tor-Matrizen
Jede der vier, im letzten Kapitel definierten Matrizen [Z], [Y], [A], [H] beschreibt das 2-Tor vollständig in Bezug auf die Variablen U1, U2, I1, I2. Die Angabe einer einzigen von diesen Matrizen
genügt also, alle anderen sagen dasselbe aus. Jede von diesen Matrizen kann durch algebraische
Umformung in jede andere übergeführt werden, allerdings mit der Einschränkung, dass bei vielen
speziellen 2-Toren nicht alle Matrizen existieren (siehe Beispiele am Ende des Kapitels). In der folgenden Tabelle sind diese Umrechnungen zusammengestellt.
Tabelle 7-1: Umrechnung der 2-Tor-Parameter
=
Z
1
⋅
det( Z )
1
⋅
Z 21
1
⋅
Z 22
LM Z
MN− Z
22
LMZ
MN 1
11
21
− Z12
Z11
OP
P
1 Q
1
⋅
Y 11
21
Z12
−Y 12
22
21
Y 11
LM Y
MNdet( Y)
22
LM 1
MNY
21
OP
PQ
=
Y
−1
⋅
Y 21
Z 22
LM Y
MN−Y
=
OP
PQ
det( Z )
LMdet(Z )
MN − Z
OP
PQ
1
⋅
det( Y )
1
Y 11
OP
PQ
OP
P
det( Y )Q
−Y 12
1
⋅
A21
1
⋅
A12
LM A
MN 1
det( A )
11
LM A
MN −1
22
=
A22
OP
PQ
− det( A )
A11
1
⋅
H 22
21
OP
PQ
1
⋅
H 11
=
−1
⋅
H 21
A
LMdet( H )
MN − H
LM 1
MN H
OP
P
det( H )Q
− H 12
21
LMdet( H )
MN H
22
1
⋅
A22
LM A
MN −1
12
det( A )
A21
OP
PQ
=
OP
P
1 Q
H 12
H
OP
P
1 Q
H 11
aet/nik
7 Zweitore (2-Tore)
8
7.5 Umkehrung eines 2-Tores, reziproke und symm. 2-Tore
Von einem 2-Tor, dessen Matrizen als bekannt vorausgesetzt werden, sollen die entsprechenden
Beziehungen für die umgekehrte Betriebsrichtung gefunden werden. (Eine im ursprünglichen 2-Tor
~
mit X bezeichnete Grösse werde im umgekehrten 2-Tor nach Figur 7-11 mit X bezeichnet).
I1
~
I1
I2
U1
~
I2
~
U1
U2
~
U2
Figur 7-11: Umkehrung eines 2-Tores. In beiden Fällen handelt es sich um das gleiche 2-Tor, Eingangsseite mit der
Lastseite vertauscht.
~
~ ~ ~ ~
U 1 = Z 11 I 1 + Z 12 I 2
~
~ ~ ~ ~
U 2 = Z 21 I 1 + Z 22 I 2
U 1 = Z11 I 1 + Z12 I 2
U 2 = Z 21 I 1 + Z 22 I 2
Die 2-Tor-Gleichungen gelten unabhängig von der äusseren Betriebsart, insbesondere gibt es einen
Betriebszustand mit:
~
I 1 = I2
~
I 2 = I1
~
U1 = U 2
~
U 2 = U1
Es handelt sich hier also nur um eine Umstellung der Variablen:
OP = LZ
PQ MN Z
Z O
~ LZ
Z =M
N Z Z PQ
~
U1
~
U2
22
21
12
11
~
det( Z ) = det( Z )
22
12
OP OP =
Q PQ
~
Z 21 I 1
⋅
Z11 ~
I2
~
~ I1
Z ⋅~
I2
OP
PQ
(7.6)
(7.7)
(7.8)
In ähnlicher Weise berechnet die Umdrehung der Y-Matrix. Bei den A- und H-Matrizen muss, wie
man aus der Anordnung der Variablen im Gleichungssystem entnehmen kann, in wesentlichen eine
Inversion durchgeführt werden. Die Resultate sind in der Tabelle 7-2 zusammengestellt.
aet/nik
7 Zweitore (2-Tore)
9
Tabelle 7-2: Umkehrung eines 2-Tores
~
X
~
det( X )
~
X
LMZ
NZ
LMY
NY
~
Z
~
Y
Z 21
Z11
22
12
Y 21
Y 11
22
12
OP
Q
OP
Q
det( Z )
det( Y )
LM
N
~
A
A22
1
⋅
det( A ) A21
~
H
H 11
1
⋅
det( H ) − H 12
LM
N
A12
A11
OP
Q
− H 21
H 22
1
det( A )
OP
Q
1
det( H )
Reziprozität
Um die in Kap. 7.2 formulierte Definition der Reziprozität (d.h. Ausgangsgrössen sind unabhängig
von der Betriebsrichtung) auf die 2-Tor-Gleichungen anzuwenden, fügen wir dem 2-Tor auf jeder
Seite eine Serieimpedanz Z0 an, speisen aus einer Spannungsquelle und schliessen das vergrösserte
2-Tor am Ausgang kurz.
Für das neue 2-Tor gilt:
U '1
U '2
Z0
I'1
U0
OP = LM( Z + Z )
Q N Z
U'1
11
OP OP
Q Q
Z12
I '1
⋅
( Z 22 + Z 0 ) I '2
0
21
I1
I2
U1
U2
Z
Betrieb vorwärts
( I '1 = I 1 ,
I '2 = I 2 )
Figur 7-12: Reziprozität
Für das vergrösserte 2-Tor gilt (7.3):
I '2 = I 2 = Y '21 U '1 +Y '22 U '2
~
~
~ ~ ~ ~
I '2 = I 2 = Y '21 U '1 +Y '22 U '2
Z0
(7.9)
~
I '1
I'2
U'2
U0
~
U '1
Z0
~
I2
~
I1
~
U1
~
Z
~
U2
Betrieb rückwärts
~ ~
~
~
( I '1 = I 1 , I '2 = I 2 )
Z0
~
I '2
~
U '2
aet/nik
7 Zweitore (2-Tore)
10
Die Betriebsbedingungen lauten:
~
U '2 = U '2 = 0,
~
U '1 = U '1 = U 0
~
Die Reziprozitätsbedingung verlangt I 2 = I 2 :
~
~
I 2 = Y '21 U 0 = I 2 = Y '21 U 0
~
Y '21 = Y '21
(7.10)
~
Y '21 = − Z '12 det( Z ' )
Nach Tabelle 7-1 und 7-2 ist:
Y '21 = − Z '21 det( Z ' )
Mit Z '12 = Z12 und Z '21 = Z 21 aus (7.9) kann (7.10) nur erfüllt sein, wenn folgendes gilt:
Z12 = Z21
Die Umrechnung dieser Reziprozitätsbedingung auf die übrigen Matrizen ergibt:
Koeffizientenbeziehung
Z12
=
Y 12
= Y 21
Z 21
Reziprozitätsbedingungen
(7.11)
det( A ) = 1
H 12
=
H 21
Die Reziprozitätsbedingung liefert also eine (einzige) Bedingung zwischen den vier Matrixelementen. Ein reziprokes 2-Tor ist deshalb durch nur drei (komplexe) Grössen bestimmt, während beim
allgemeinen 2-Tor deren vier notwendig sind. Zu beachten ist, dass beim Reziprozitätsversuch (Fi~ ~
gur 7-12) die Eingangsgrössen U1, I1 beim Umdrehen des 2-Tores ( U 1 , I 1 ) nicht gleich bleiben.
Auf nichtreziproke 2-Tore wird später in diesem Kapitel noch besonders eingegangen.
Wenn sich beim Umdrehen des 2-Tores weder Ein- noch Ausgangsgrössen ändern, so können die
beiden Tore nicht unterschieden werden; es handelt sich dann um ein symmetrisches 2-Tor.
Für dieses gilt:
~
Z = Z,
~
Y=Y
usw., und daraus findet man:
aet/nik
7 Zweitore (2-Tore)
11
Koeffizientenbeziehung
Z11
=
Z 22
Z12 = Z 21
Y 11
= Y 22
A11
=
Y 12 = Y 21
det( A ) = 1
H 12 = H 21
A22
det( H ) = 1
Symmetriebedingungen
(7.12)
Ein symmetrisches 2-Tor ist demnach durch nur zwei komplexe Parameter bestimmt.
Ist bei einem 2-Tor die Struktur bezüglich einer Mittelachse symmetrisch, so ist es auch elektrisch
symmetrisch. Ein elektrisch symmetrisches 2-Tor muss aber in der Geometrie der Schaltung nicht
symmetrisch sein, obwohl es dafür immer eine Ersatzschaltung mit symmetrischer Topologie gibt.
7.6 Leerlauf und Kurzschluss am 2-Tor
Die Betriebsbedingungen Leerlauf und Kurzschluss sind als extreme Zustände beim 2-Tor von besonderer Bedeutung, einerseits für viele Fragen der Analyse von Schaltungen, andrerseits für das
messtechnische Bestimmen der 2-Tor-Parameter. Zuerst seien für die vier Fälle die Eingangsimpedanzen berechnet (wir benützen die Indizes L und K und für Leerlauf und Kurzschluss).
I1
I2
U1
1
2
Z1K
I1
R=0
U1=0
R=0
U2=0
sekundärer Kurzschluss
I1
U1
2
1
2
U2
Z2K
primärer Kurzschluss
I2=0
1
I2
I1=0
U2 R = ∞
R = ∞ U1
I2
1
2
Z1L
U2
Z2L
sekundärer Leerlauf
primärer Leerlauf
Figur 7-13: Leerlauf und Kurzschluss am 2-Tor
Z1K , Z 2 K = Kurzschluss - Eingangsimpedanzen
Z1L , Z 2 L = Leerlauf - Eingangsimpedanzen
Zur Berechnung dieser Impedanzen benützt man am besten das 2-Tor-Gleichungspaar mit den A~
bzw. A -Koeffizienten.
Z1 =
U 1 A11 U 2 − A12 I 2
=
I 1 A21 U 2 − A22 I 2
(7.13a)
aet/nik
Z2 =
7 Zweitore (2-Tore)
12
U 2 A22 U 1 − A12 I 1
=
I2
A21 U 1 − A11 I 1
(7.13b)
Setzt man in diesen Gleichungen entsprechend Figur 7-13 nacheinander U2, U1, I2, I1, Null, so ergeben sich die in Tabelle 7-3 zusammengestellten Impedanzwerte. Natürlich kann man auch von 2Tor-Gleichungen in anderer Form ausgehen oder die Resultate nach der Umrechnungstabelle 7-1
nach anderen Koeffizienten auflösen.
Tabelle 7-3: Leerlauf und Kurzschlussimpedanzen
A
Z
Y
H
Z 1K
=
A12
A22
det( Z )
Z 22
1
Y 11
H 11
Z 2K
=
A12
A11
det( Z )
Z11
1
Y 22
H 11
det( H )
Z1L
=
A11
A21
Z11
Y 22
det( Y )
det( H )
H 22
Z 2L
=
A22
A21
Z 22
Y 11
det( Y )
1
H 22
Aus dieser Tabelle ist die physikalische Bedeutung einiger 2-Tor-Koeffizienten zu entnehmen: Z11
und Z22 sind die an Tor 1 und 2 gemessenen Leerlaufimpedanzen, Y11 und Y22 die an 1 und 2 gemessenen Kurzschlussadmittanzen.
Ferner kann man daraus z.B. folgende Zusammenhänge entnehmen:
Z1K Z 2 K A12 A21
=
=
Z1L Z 2 L A11 A22
(7.14)
Z1K Z 1L
=
= det( H )
Z 2K Z 2L
(7.15)
Die vier Eingangsimpedanzen sind also nicht unabhängig voneinander. Dies bedeutet, dass
ein 2-Tor nicht vollständig bestimmt werden kann aus der Messung dieser vier Grössen.
Vollständig können die 2-Tor-Koeffizienten nur gefunden werden, wenn mindestens eine Messung
durchgeführt wird, bei der gleichzeitig eine Eingangs- und eine zugehörige Ausgangsgrösse bestimmt werden. Die Quotienten aus Ein- und Ausgangsgrössen sind sog. Übertragungsimpedanzen,
-admittanzen und Übersetzungsverhältnisse.
aet/nik
7 Zweitore (2-Tore)
13
Spricht man von Übertragungsgrössen, so versteht man darunter, sofern nicht ausdrücklich
anders bezeichnet, immer diejenigen für den Betriebszustand Leerlauf oder Kurzschluss. So definiert hängen sie nur von den 2-Tor-Parametern ab.
Tabelle 7-4: Leerlauf- und Kurzschluss-Übertragungsgrössen
Bezeichnung
Definition
Betriebsbedingung
Übertragungsimpedanz
vorwärts
= Z 21
=
U2
I1
I2 = 0
(Leerlauf)
Übertragungsimpedanz
rückwärts
= Z12
=
U1
I2
I1 = 0
(Leerlauf)
Übertragungsadmittanz
vorwärts
= Y 21
=
I2
U1
U2 = 0
(Kurzschluss)
Übertragungsadmittanz
rückwärts
= Y 12
=
I1
U2
U1 = 0
(Kurzschluss)
Spannungsübersetzung
vorwärts
= T u21
=
U2
U1
=
1
A11
I2 = 0
(Leerlauf)
Spannungsübersetzung
rückwärts
= T u12
=
U1
U2
= H 12
I1 = 0
(Leerlauf)
Stromübersetzung
vorwärts
= T i21
Stromübersetzung
rückwärts
= T i12
=−
I2
I1
=−
=
I1
I2
1
A22
=
= − H 21
det( A )
A11
U2 = 0
(Kurzschluss)
U1 = 0
(Kurzschluss)
aet/nik
7 Zweitore (2-Tore)
14
7.7 Eingangsimpedanz und Übertragungsgrössen bei
beliebiger Last
Bei einer beliebigen Lastimpedanz Zb (bzw. Za beim rückwärts gespeisten 2-Tor) hängt die Eingangsimpedanz von der Last ab.
I1
Z1 =
U1
U1
I1
I1
I2
1
2
U2
Zb
Za
U1
I2
1
2
U2
Z2 =
U2
I2
Figur 7-14: Betriebsbedingungen für die Berechnung der Eingangs- und Übertragungsgrössen
Die Eingangsimpedanzen berechnen sich am einfachsten mit Hilfe der A-Matrix:
Z1 =
U 1 A11 U 2 − A12 I 2
=
I 1 A21 U 2 − A22 I 2
Wenn das 2-Tor mit Zb belastet ist, gilt: U 2 = − Z b ⋅ I 2
Man erhält somit für Z1:
Z1 =
A11 Z b + A12
A21 Z b + A22
(7.16)
In gleicher Weise geht man vor, um Z2 zu berechnen. Algebraische Umformung ergibt die Eingangsimpedanz in Funktion der anderen 2-Tor-Parameter, die Beziehungen sind in der Tabelle 7-5
zusammengestellt.
Betriebsübertragungsimpedanzen (bei allgemeiner Belastung und Stromspeisung) können z.B.
aus den A-Parametern gefunden werden (Indizes ab, ba als Hinweis auf die Abhängigkeit von der
äusseren Last!) (siehe Figur 7-14):
I 1 = A21U 2 − A22 I 2
I1
A I
A
= A21 − 22 2 = A21 + 22
U2
U2
Zb
Z ba =
1
U2
=
I1
A21 + A22 Z b
(7.17)
(weitere Beziehungen siehe Tabelle 7-5).
Die Berechnung des Ausgangsstromes bei Spannungsspeisung geschieht entsprechend mit Hilfe der
Betriebsübertragungsadmittanz:
aet/nik
7 Zweitore (2-Tore)
15
U 1 = A11U 2 − A12 I 2
U 1 A11U 2
=
− A12 = −( A11 Z b + A12 )
I2
I2
Y ba =
−1
I2
=
U 1 A11 Z b + A12
(7.18)
In gleicher Weise können auch die Betriebsübersetzungen bestimmt werden; die Resultate gehen
aus der Tabelle 7-5 hervor.
Tabelle 7-5: Betriebs- Eingang- und Übertragungsgrössen
Bezeichnung
Definition
Berechnung
Quelle
Betriebsrichtung
Z1
=
U1
I1
=
A11 Z b + A12
A21 Z b + A22
=
Z11 Z b + det( Z )
Z b + Z 22
I1
vorwärts
Z2
=
U2
I2
=
A22 Z a + A12
A21 Z a + A11
=
Z 22 Z a + det( Z )
Z a + Z11
I2
rückwärts
Z ba
=
U2
I1
=
Zb
A21 Z b + A22
=
Z 21 Z b
Z b + Z 22
I1
vorwärts
Z ab
=
U1
I2
=
Z a ⋅ det( A )
A21 Z a + A11
=
Z12 Z a
Z a + Z11
I2
rückwärts
Y ba
=
I2
U1
=
−1
A11 Z b + A12
=
− Z 21
Z11 Z b + det( Z )
U1
vorwärts
Y ab
=
I1
U2
=
− det( A )
A22 Z a + A12
=
− Z12
Z 22 Z a + det( Z )
U2
rückwärts
T uba
=
U2
U1
=
Zb
A11 Z b + A12
=
Z 21 Z b
Z11 Z b + det( Z )
U1
vorwärts
T uab
=
U1
U2
=
Z a ⋅ det( A )
A22 Z a + A12
=
Z12 Z a
Z 22 Z a + det( Z )
U2
rückwärts
T iba
=
−
I2
I1
=
1
=
Z 21
Z b + Z 22
I1
vorwärts
T iab
=
−
I1
I2
=
=
Z12
Z a + Z11
I2
rückwärts
A21 Z b + A22
det( A )
A21 Z a + A11
aet/nik
7 Zweitore (2-Tore)
16
7.8 Der Gyrator
Die meisten praktisch verwendeten passiven 2-Tore gehorchen den im Abschnitt 7.5 abgeleiteten
Reziprozitätsbedingungen. Andrerseits erlangen nichtreziproke, passive 2- und Mehrtore heute steigende Bedeutung. Darunter nimmt der Gyrator eine besondere Stellung ein. Er stellt gewissermassen Nichtreziprozität in Reinkultur dar. Zwar trifft man die Bezeichnung „Gyrator“ in der Literatur
für verschiedene ähnliche 2-Tore, die Tendenz geht jedoch eindeutig dahin, nur das hier besprochene, elementare 2-Tor mit diesem Namen zu belegen, der an den Zusammenhang mit dem Kreisel
erinnert. Kreisel sind mechanische nichtreziproke Elemente. Der Gyrator gehorcht folgenden Beziehungen:
U 1 = − RG I 2
U2 =
RG I 1
Gyratorgleichungen
(7.19)
Entsprechen hat er folgende 2-Tor-Matrizen:
ZG =
LM 0
NR
− RG
0
G
AG =
LM 0
N1 R
G
OP ,
Q
OP
0Q
YG =
LM 0
N −1 R
G
1 RG
0
OP
Q
(7.20)
RG
RG ist reell und heisst Gyratorkonstante. Dreht man den Gyrator um (Indizes 1 und 2 vertauscht),
so geht RG in –RG über. Die Determinante der A-Matrix ist –1, man nennt deshalb den Gyrator
auch antireziprok, (im allgemeinen kann ja diese Determinante bei nichtreziproken 2-Toren jeden
beliebigen Wert annehmen). Der Gyrator ist ein passives, verlustloses 2-Tor; allerdings ist seine
passive Realisierung heute nur bei sehr hohen Frequenzen (>100MHz) möglich und zwar durch
Anwendung von anisotropen, magnetischen Materialien. Mit Hilfe von aktiven Elementen ist eine
Realisierung auch bei tiefen Frequenzen möglich (ohne dass dadurch das 2-Tor von aussen gesehen
aktiv ist).
Im Unterschied zu den reziproken 2-Toren lässt sich der Gyrator nicht durch Zusammenschalten von Eintoren realisieren, man muss daher ein besonderes Symbol dafür verwenden. Meistens wird das von Tellegen vorgeschlagene, in Figur 7-15a dargestellte, Bild verwendet. Ähnlich
wie bei Gegeninduktivitäten muss die Kopplung der Zweige präzisiert werden, was nach der angegebenen Vorzeichenkonvention geschieht:
aet/nik
7 Zweitore (2-Tore)
17
Vorzeichenkonvention:
a)
Mit den Punkten werden diejenigen Klemmen bezeichnet,
die gleiche Polarität erhalten, wenn Energie in Pfeilrichtung
durch den Gyrator fliesst (für die umgekehrte Flussrichtung
bezeichnen die Punkte Klemmen verschiedener Polarität).
RG
b)
Figuren a) und b) stellen also genau denselben Gyrator dar.
RG
In c) bezeichnet der längere Pfeil die Richtung mit einer
zusätzlichen Phasendrehung von 180°.
π
Figur 7-15:
c)
Gyratorsymbole
a) b) nach Tellegen
c) für einpolige Darstellung
Trotz des annähernd symmetrischen Symbols ist der Gyrator natürlich nicht symmetrisch, Symmetrie ist ja nur bei reziproken 2-Toren möglich.
Der Gyrator hat gewisse Verwandtschaft mit dem idealen Transformator; er hat Matrizen mit nur
zwei Diagonalelementen; er ist verlustlos und lässt sich nicht durch Eintore realisieren; die Kettenschaltung von zwei Gyratoren ergibt einen idealen Transformator.
Interessant ist besonders seine Eigenschaft, die angeschlossene Impedanz zu invertieren:
Z1 =
RG2
Zb
Inversion durch Gyrator
(7.21)
Allerdings hängt diese Eigenschaft nicht direkt mit der Nichtreziprozität zusammen; es gibt auch
reziproke, invertierende 2-Tore. Diese sind aber (falls sie aus passiven Elementen bestehen) im Gegensatz zum Gyrator, stark frequenzabhängig.
Wenn man die in Abschnitt 7.11 angegebenen Zusammenschaltungsregeln anwendet, so wird ersichtlich, dass jedes passive, allgemeine (nichtreziproke) 2-Tor zusammengesetzt werden kann aus
einem passiven, reziproken und einem Gyrator,
Das heisst jedoch nicht, dass der Gyrator das einzige nichtreziproke 2-Tor ist, das zu diesem
Zwecke dienen kann, es ist nur ein mögliches und hinreichendes, das in der Analyse gerne benützt
wird.
aet/nik
7 Zweitore (2-Tore)
18
7.9 Gesteuerte Quellen
Es gibt viele 2-Tore, die sich realisieren lassen durch Zusammenschalten aus Eintoren. Nicht alle 2Tore sind jedoch in dieser Art reduzierbar. Zwei davon haben wir bereits ausführlich besprochen;
Transformator und Gyrator. Der Transformator oder die Gegeninduktivität können allerdings im
Rahmen der 2-Tor-Theorie noch als reduzierbar gelten, da wir keine Längsspannungen betrachten.
Irreduzibel sind aber in jedem Falle die nichtreziproken 2-Tore. Neben dem Gyrator, der in
der Analyse gewöhnlich als Baustein der nichtreziproken, passiven Netzwerke gilt, spielen die gesteuerte Quellen eine wichtige Rolle. Sie bilden in der Netzwerktheorie eine Gruppe von idealisierten, aktiven Schaltungen, hauptsächlich benützt in der Analyse von Verstärkern oder in allgemeinen Ersatzschaltungen für 2-Tore.
Quellen haben wir bis jetzt als Störfunktionen betrachtet, ihre Spannungen oder Ströme
wurden von aussen aufgezwungen, unabhängig vom Verhalten des Netzwerkes. Hängt jedoch der
Strom oder Spannung einer Quelle proportional von einer Variablen im Netzwerk selber ab, so
spricht man von einer „gesteuerten Quelle“. Solche Quellen erscheinen in der Netzwerkalgebra
nicht mehr als Störfunktionen, sondern als Kopplungen eines Zweiges mit einem anderen (d.h. zusätzliche Beziehung zwischen Variablen).
Im Unterschied zur Kopplung durch Gegeninduktivität oder Gyratoren wirken gesteuerte
Quellen nur in einer Richtung, der Steuerzweig wird vom Quellenzweig nicht beeinflusst.
Je nach Art der Quelle (U- oder I-Quelle) und Art der Steuerung sind vier Arten von idealen,
gesteuerten Quellen zu unterscheiden. Die Ausgangsgrösse der Quelle kann entweder proportional
zu einem Steuerstrom oder einer Steuerspannung sein. Diese vier Fälle sind in der Tabelle 7-6 zusammengestellt.
Tabelle 7-6: Ideale gesteuerte Quellen
Art der Quelle
charakteristische
Grösse und deren Definition
stromgesteuerte
Stromquelle
Stromverstärkung vi
stromgesteuerte
Spannungsquelle
Übertragungsimpedanz Z21
I 2 = v i ⋅ I1
U 2 = Z 21 ⋅ I 1
spannungsgesteuerte
Stromquelle
Übertragungsadmittanz Y21
spannungsgesteuerte
Spannungsquelle
Spannungsverstärkung vu
I 2 = Y 21 ⋅ U 1
U 2 = v u ⋅U 1
Symbol
v i ⋅ I1
Z 21 ⋅ I 1
Y 21 ⋅ U 1
v u ⋅U 1
2
2
2
2
A-Matrix
LM0
N0
LM 0
N1 Z
LM0
N0
0
−1 v i
OP
Q
0
0
OP
Q
21
−1 Y 21
0
LM1 v 0OP
N 0 0Q
u
OP
Q
aet/nik
7 Zweitore (2-Tore)
19
Gesteuerte Quellen mit Innenwiderstand oder innerer Impedanz Z2 können in gleicher Weise umgewandelt werden wie unabhängige Quellen. Ein Beispiel ist in Figur 7-16 gezeigt.
Z2
U2
v u21 U 1
≡
Y 21 U 1
Z2
Y 21 = v u 21 Z 2
v u21 = Y 21 Z 2
Figur 7-16: Umwandlung des Quellenzweiges bei gesteuerten, realen Quellen
Ausser dem Quellenzweig (oder Wirkzweig) kann auch der Steuerzweig nicht ideal sein, d.h. eine
endliche Impedanz Z1 enthalten. In diesem Falle kann man auch nach dem ohmschen Gesetz einen
Steuerstrom in eine äquivalente Steuerspannung verwandeln. Für diese Schaltung, dargestellt in Figur 7-17, ergeben sich dann die folgenden Koeffizienten der A-Matrix:
A11 = −1 (Y 21 Z 2 )
A12 = −1 Y 21
= 1 vu
= Z2 vu
b
g b g
= −1 bY Z g = Z b v Z g
(7.22)
A21 = −1 Y 21 Z1 Z 2 = 1 v u Z1
A22
21
2
u
I2
I1
U1
1
Z1
Z2
U2
1
I2
I1
U1
Z1
Y 21 U 1
Z2
U2
U 20 = v u U 1
Figur 7-17: reale gesteuerte Quelle mit Impedanzen in Steuer- und Quellenzweig
Bei gesteuerten Quellen besteht keine Rückwirkung auf den Steuerzweig, eine äussere Einspeisung
auf Tor 2 hat auf das Tor 1 keine Wirkung. In den Matrizen äussert sich diese Eigenschaft darin,
dass vom umgedrehten 2-Tor keine A-Matrix existiert. Dies gilt auch dann noch, wenn in
Quellen- und Steuerzweig Impedanzen vorhanden sind (Figur 7-17).
In Wirklichkeit wird eine völlige Entkopplung des Steuerzweiges nur annähernd erreicht, es
gelingt jedoch durch besondere Schaltungen die Rückwirkung zu verkleinern (siehe Schaltungstechnik in der Elektronik).
Gesteuerte Quellen werden häufig bei der Analyse von Verstärkern benützt. Ersatzschaltungen für Transistoren enthalten gesteuerte Quellen: man geht nach dem uns schon öfters begegneten
Prinzip vor, eine solche praktisch physikalische Anordnung zu zerlegen in einen Kern (die gesteuerte Quelle) mit den wesentlichsten, aber idealisierten Eigenschaften und einigen Zusatzelementen,
um (je nach verlangter Genauigkeit) die Abweichungen vom einfachen Ideal zu berücksichtigen.
aet/nik
7 Zweitore (2-Tore)
20
Transistoren (in sog. Emitterschaltung) werden im einfachsten Fall als stromgesteuerte Stromquellen dargestellt (siehe Figur 7-18). Dieses Schema gilt ebenfalls nur für den linearen Bereich und für
niedrige Frequenzen. Bei höheren Frequenzen müssen die internen Kapazitäten mitberücksichtigt
werden.
UB =
IC=
B
U BE ~ + U BE =
E
I C~
C
IB
IB
IC
B
U CE ~
E
UBE
RBE
β IB
C
RCE
E
UCE
E
Figur 7-18: Transistor und sein einfachstes Ersatzschaltbild, β = Stromverstärkung = dIC dI B
In Figur 7-18 (links) ist die Gleichstromspeisung und ein Abblockkondensator für die Gleichspannung gestrichelt eingezeichnet, im Ersatzschema (rechts) sind diese Verbindungen weggelassen, in
der Annahme, dass die Impedanz der Speisung, die natürlich in der Praxis mitberücksichtigt werden
muss, in die Lastimpedanz der Schaltung einbezogen wird. Die den Arbeitspunkt festlegenden
Gleichströme- und Spannungen werden in der Wechselstromanalyse oft weggelassen.
7.10 Ersatzschaltungen
Ein lineares Eintor ist in Bezug auf seinen Einfluss auf die Ströme und Spannungen innerhalb eines
Netzwerkes vollständig bestimmt durch eine einzige Grösse, die Eingangsimpedanz. Ist es aktiv, so
kann noch eine Quelle dazukommen.
Es stellt sich die Frage nach solchen einfachen Ersatzschaltungen für 2-Tore. Eine Ersatzschaltung soll zu einem gegebenen 2-Tor äquivalent sein, so dass die beiden 2-Tore von aussen
nicht unterschieden werden können, oder – was dasselbe bedeutet – sie soll dieselbe Matrix haben
wie das Originalzweitor. Besonders interessant sind natürlich Ersatzschaltungen von möglichst einfachem Aufbau.
Eine allgemein verwendbare Ersatzschaltung muss, entsprechend den vier unabhängigen
Matrixparametern, mindesten vier Elementen aufweisen. Solche Schaltungen folgen z.B. unmittelbar aus der Z-, der Y- und der H-Matrix (Figuren 7-19...7-21).
Ein 2-Tor mit vier allgemeinen, voneinander unabhängigen Matrixelementen kann durch
jede dieser drei Schaltungen dargestellt werden. Existiert bei einem speziellen 2-Tor eine der Matrizen nicht, so ist auch das zugehörige Quellenersatzschema nicht anwendbar (Beispiel: idealer
Transformator).
aet/nik
7 Zweitore (2-Tore)
I1
21
I2
Z11
U1
Z12 ⋅ I 2
Z 21 ⋅ I 1
U 1 = Z11 I 1 + Z12 I 2
Z22
U2
U 2 = Z 21 I 1 + Z 22 I 2
Figur 7-19: Z-Ersatzschaltung für ein allgemeines, proportionales 2-Tor
I1
U1
I2
Y11
Y 12 ⋅ U 2
Y 21 ⋅ U 1
U2
Y22
I 2 = Y 21 U 1 + Y 22 U 2
I 1 = Y 11 U 1 + Y 12 U 2
Figur 7-20: Y-Ersatzschaltung für ein allgemeines, proportionales 2-Tor
I1
U1
I2
H11
H 12 ⋅ U 2
H 21 ⋅ I 1
U 1 = H 11 I 1 + H 12 U 2
1/H22
U2
I 2 = H 21 I 1 + H 22 U 2
Figur 7-21: H-Ersatzschaltung für ein allgemeines, proportionales 2-Tor
Beschränkt man sich auf reziproke 2-Tore, die durch drei Grössen charakterisiert werden können,
so kommt man ohne gesteuerte Quellen aus; Ersatzschaltungen lassen sich dann aus Eintoren aufbauen. Bekannt sind insbesondere die T- und π-Schaltung:
Z11-Z12
Z22-Z12
Z12
Figur 7-22: T-Ersatzschaltung für reziproke 2-Tore
aet/nik
7 Zweitore (2-Tore)
22
−Y12
Y11+Y12
Y22+Y12
(Achtung: Admittanzwerte eingetragen)
Figur 7-23: π-Ersatzschaltung für reziproke 2-Tore (dual zur T-Schaltung)
Eine weitere Ersatzschaltung für reziproke 2-Tore kann aus einem idealen Transformator mit komplexem n und zwei Impedanzen zusammengestellt werden, z.B.
Z u = A12 A22 = det( Z ) Z 22
Z v = A22 A21 = Z 22
n = 1 A22 = Z12 Z 22
∞
Zu
Zv
n:1
Figur 7-24: Ersatzschaltbild mit idealem Transformator (n = komplex!) (für reziproke 2-Tore)
Diese Ersatzschaltungen können auch symmetriert werden (Erdsymmetrie), indem man die „Längswiderstände“ halbiert und symmetrisch bezüglich der Tore anordnet (siehe Figuren 7-7 und 7-8).
Es muss darauf hingewiesen werden, dass es spezielle 2-Tore gibt, für die einzelne der angegebenen
Ersatzschaltungen nicht existieren. Beispielsweise gibt es weder eine T- noch eine π-Ersatzschaltung für den idealen Transformator, obwohl er reziprok ist. Dies hängt damit zusammen, dass seine
Z- und Y-Matrizen nicht existieren.
aet/nik
7 Zweitore (2-Tore)
23
7.11 Zusammenschalten von 2-Toren
Einer der grossen Vorteile der Matrizendarstellung von 2-Toren liegt darin, dass sie die Berechnung
von 2-Tor-Kombinationen sehr erleichtert. Ähnlich wie man Netzwerke zusammensetzt aus Eintoren und dabei Summation von Impedanzen oder Admittanzen durchzuführen hat, kann die Algebra
der Zusammenschaltung von 2-Toren durch Matrizenoperationen beherrschen.
Bei der Serieschaltung von 2-Toren werden beide Eingangstore und beide Ausgangstore in Serie
geschaltet nach Figur 7-25. Diese Schaltung berechnet man vorteilhaft mit Impedanzmatrizen.
Z'
Z
Z''
Figur 7-25: Serieschaltung von 2-Toren
Die Berechnung der Z-Matrix des kombinierten 2-Tores ist relativ einfach und ergibt:
Z = Z ' + Z ''
Serieschaltung
(7.23)
In ähnlicher Weise definiert und berechnet man die Parallelschaltung mit Hilfe der Admittanzmatrizen:
Y'
Y
Y''
Figur 7-26: Parallelschaltung von 2-Toren
Y = Y' + Y''
Parallelschaltung
(7.24)
aet/nik
7 Zweitore (2-Tore)
24
Die Addition der Hybridmatrizen entspricht der Serie-Parallelschaltung nach Figur 7-27:
H'
H
H''
Figur 7-27: Serie-Parallelschaltung von 2-Toren
H = H' + H''
Serie-Parallelschaltung
(7.25)
Die angegebenen, einfachen Regeln für die Serie- und Parallelschaltung von 2-Toren liefern nur
unter gewissen Bedingungen das richtige Resultat. Dies rührt daher, dass über die
Längsspannungen U12 und U1´2´ in den 2-Tor-Matrizen nichts ausgesagt wird (siehe Figur 7-10).
Bei der Zusammenschaltung auferlegt man diesen Spannungen einschränkende Bedingungen, was
sich so auswirkt, als würde man zwischen den Klemmen 1-2 oder 1´-2´ Quellen anlegen. Solche
Quellen beeinflussen die Ein- und Ausgangsgrössen in einer Art, die aus den 2-Tor-Matrizen nicht
herausgelesen werden kann. Brune hat Regeln abgeleitet, mit denen geprüft werden kann, ob die
Matrizenbeziehungen angewandt werden dürfen (der interessierte Leser sei auf weiterführende
Literatur verwiesen).
Besonders häufig gebraucht wird die Kettenschaltung von 2-Toren (Figur 7-28).
A'
A''
A
Figur 7-28: Kettenschaltung von 2-Toren
A = A' ⋅ A''
Kettenschaltung
(7.26)
7.12 Spezielle 2-Tore
Im folgenden sind katalogartig einige elementare 2-Tore mit ihren zugehörigen, wichtigsten Matrizen zusammengestellt. Allerdings existieren bei vielen speziellen 2-Toren nicht alle Matrizen. Aus
den einfachen 2-Toren könne die komplizierten nach den Zusammenschaltregeln gewonnen
werden.
aet/nik
7 Zweitore (2-Tore)
2-Tor
25
Z
ZQ =
LMZ
NZ
a
a
Y
Za
Za
OP
Q
A
AQ =
existiert nicht
LM 1 0OP
N1 Z 1Q
a
Querimpedanz
Za
existiert nicht
Längsimpedanz
Zb
YL =
LM 1 Z
N −1 Z
b
b
−1 Z b
1 Zb
OP
Q
AL =
LM1 Z OP
N0 1 Q
b
aet/nik
7 Zweitore (2-Tore)
ZT =
LMZ + Z
N Z
1
2
2
26
Z2
Z2 + Z3
OP
Q
YT =
LM
N
Z2 + Z3
1
⋅
−Z2
Z1 Z 2 + Z 2 Z 3 + Z1 Z 3
−Z 2
Z1 + Z 2
OP
Q
AT
LM1 + Z
Z
=M
MM Z1
N
Z1 + Z 3 +
1
2
1+
2
Z1 Z 3
Z2
Z3
Z2
OP
PP
PQ
T-Glied
Z1
Z3
Z2
Zπ =
LM b
N
Z Z + Z3
1
⋅ 1 2
Z1 Z 3
Z1 + Z 2 + Z 3
g
Z1 Z 3
Z3 Z1 + Z 2
b
OP
gQ
Yπ
LM 1 + 1
Z Z
=M
MM − Z1
N
1
2
2
OP
P
1
1P
+
Z
Z PQ
−
2
1
Z2
3
LM 1 + Z
Z
=M
MM Z1 + Z1 + ZZZ
N
2
Aπ
3
2
1
3
1
π-Glied
Z2
Z1 Z3
2-Tor
Z
Y
A
OP
P
Z P
1+
Z PQ
Z2
2
3
1
aet/nik
7 Zweitore (2-Tore)
27
idealer Übertrager
∞
existiert nicht
AN =
existiert nicht
LMn
N0
0
1n
OP
Q
n:1
ZM =
Gegeninduktivität
M
L1
L2
LM sL
Ns M
1
OP
sL Q
sM
2
YM
LM 1
1 sL
= ⋅M
σ M −k
MN s M
1
2
−k 2
sM
1
sL2
OP
PP
PQ
AM
LL M
=M
MN1 bs M g
1
k=
c
hOP
PQ
s M 1 k2 −1
L2 M
M
, σ = 1− k2
L1 L2