Kopp - Fakultät für Mathematik, TU Dortmund
Werbung

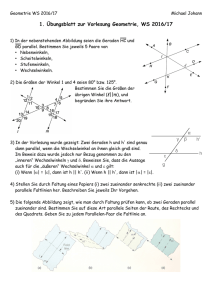
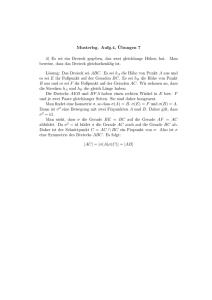
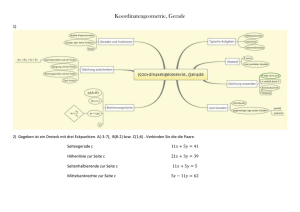
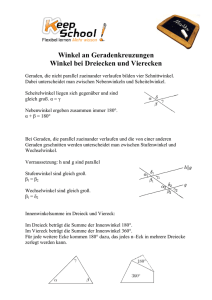
Proseminar zur Linearen Algebra und Elementargeometrie Elementare Geometrie - Die Gerade & das Dreieck Teil I Eingereicht von: Alexandra Kopp 178294 [email protected] Eingereicht bei: Prof. Dr. L. Schwachhöfer 18.10.2016 Elementare Geometrie: Teil I Inhaltsverzeichnis 1 Die Gerade 1.1 Die Strahlensätze . . . . . . . . . . . . . . . . . 1.1.1 Satz (Der Strahlensatz) . . . . . . . . . 1.1.2 Satz (Umkehrung des Strahlensatzes) 1.2 Satz von Pappos . . . . . . . . . . . . . . . . . 1.3 Satz von Desargues . . . . . . . . . . . . . . . 1.4 Satz von Thales . . . . . . . . . . . . . . . . . . 2 Das Dreieck 2.1 Bezeichnung . . . . . . . . . . . . . . . . . . . 2.2 Winkel in Dreiecken . . . . . . . . . . . . . . 2.2.1 Satz (Kosinus- und Sinussatz) . . . 2.2.2 Definition . . . . . . . . . . . . . . . . 2.2.3 Satz . . . . . . . . . . . . . . . . . . . 2.2.4 Satz . . . . . . . . . . . . . . . . . . . 2.2.5 Satz (Innen- und Außenwinkel) . . . 2.3 Beziehungen zwischen Winkeln und Seiten . 2.3.1 Satz (Satz des Pythagoras) . . . . . . 2.3.2 Satz (Kathetensatz) . . . . . . . . . . 2.3.3 Satz (Höhensatz) . . . . . . . . . . . TU Dortmund Datum: 18.10.2016 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 4 4 6 9 13 14 . . . . . . . . . . . 17 17 18 19 19 20 20 20 21 21 23 24 Seite 2 Elementare Geometrie: Teil I Abbildungsverzeichnis 1 2 3 4 5 6 7 8 9 10 Erstes Beispiel für mögliche Lagebeziehungen der Geraden . . . . Zweites Beispiel für mögliche Lagebeziehungen der Geraden . . . Darstellung des zweiten Falls der Umkehrung des Strahlensatzes Darstellung des Satzes von Pappos . . . . . . . . . . . . . . . . . . Darstellung des Satzes von Desargues . . . . . . . . . . . . . . . . Erste Lagemöglichkeit der Geraden des Satzes von Thales . . . . Zweite Lagemöglichkeit der Geraden des Satzes von Thales . . . Konstruktion des Dreiecks und dessen Bezeichnung . . . . . . . . Kosinuskurve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Rechtwinkliges Dreieck mit winkelhalbierender Senkrechten . . . TU Dortmund Datum: 18.10.2016 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5 8 10 13 15 15 18 22 23 Seite 3 Elementare Geometrie: Teil I Diese Ausarbeitung bezieht sich auf den Vortrag im Proseminar “Lineare Algebra und Elementargeometrie“ vom 18.Oktober 2016. In diesem Vortrag wurde das Thema Euklidische Geometrie eingeleitet. Dieser erste Teil beinhaltet das Thema die Gerade und eine Einleitung zu dem Thema das Dreieck. Die Ausarbeitung beinhaltet also grundlegende Definitionen, Sätze und Beispiele, welche ebenfalls für den zweiten Teil des Themas Euklidische Geometrie relevant sind. Der Vortrag, sowie die Ausarbeitung, setzen die Kenntnisse der Vorlesungen des Wintersemesters 2015/2016 “Lineare Algebra I für Lehramt“ und “Lineare Algebra II für Lehramt“ aus dem Sommersemester 2016 bei Prof. Dr. R. Scharlau als bekannt voraus. Die Primärliteratur, auf welcher der Vortrag und die Ausarbeitung beruhen, ist in Kapitel 2.1. und 2.2. der dritten Auflage des Buches Elementargeometrie, verfasst von Ilka Agricola und Thomas Friedrich, welches im Vieweg und Teubner Verlage verö↵entlicht wurde, zu finden. 1 Die Gerade Die Gerade stellt das erste Kapitel dieser Ausarbeitung dar. Wir befinden uns in einer zweidimensionalen Ebene und bezeichnen diese mit E 2 . Unter einer Geraden verstehen wir eine Punktmenge, die wir parametisieren können. So können wir alle Gerade in der gegebenen Ebene darstellen. Während dieses Kapitels werden verschiedene Geraden G↵ , G∗↵ mit ↵ = 1, 2, 3 betrachtet. Diese Geraden dürfen nicht identisch sein. 1.1 Die Strahlensätze 1.1.1 Satz (Der Strahlensatz) Wir betrachten zwei Geraden G1 , G2 , welche sich in einem Punkt S schneiden. Es gilt also G1 ∩G2 = {S}. Des Weiteren existieren zwei parallele Geraden G∗1 , G∗2 , welche G1 , G2 in jeweils einem Punkt schneiden. Diese Schnittpunkte lassen sich mit ↵ = 1, 2 wie folgt darstellen G∗1 ∩ G↵ = {P↵ }, G∗2 ∩ G↵ = {Q↵ }, wobei Q↵ ≠ P↵ ≠ S. Die folgenden Abbildungen zeigen mögliche Konstruktionen und Lagemöglichkeiten der Geraden: TU Dortmund Datum: 18.10.2016 Seite 4 Elementare Geometrie: Teil I Abbildung 1: Erstes Beispiel für mögliche Lagebeziehungen der Geraden Abbildung 2: Zweites Beispiel für mögliche Lagebeziehungen der Geraden TU Dortmund Datum: 18.10.2016 Seite 5 Elementare Geometrie: Teil I Für die Längen der entsprechenden Seiten gilt �SP1 � �P1 P2 � �SP2 � = = . �SQ1 � �Q1 Q2 � �SQ2 � Beweis: Q1 ∈ G1 und Q2 ∈ G2 , das heißt, die jeweiligen Punkte liegen auf den entsprechenden Geraden. Hieraus folgt, dass die Zahlen t1 , t2 ∈ R mit Q1 = S + t1 (P1 − S), Q2 = S + t2 (P2 − S) existieren. Nun folgt wiederum (I) Q1 − Q2 = t1 (P1 − S) − t2 (P2 − S). ∗ ∗ Da G1 , G2 parallel sind, existiert darüber hinaus ein Parameter t3 ∈ R mit t3 (P1 − P2 ) = Q1 − Q2 . Es folgt also (II) Q1 − Q2 = t3 (P1 − S) − t3 (P2 − S). Da sich die Geraden G1 ≠ G2 im Punkt S schneiden folgt, dass die Vektoren P1 −S, P2 −S nicht parallel, also linear unabhängig, in der Ebene sind. Aus (I) und (II) folgt t1 = t2 = t3 . Damit gilt außerdem �t1 � = �t2 � = �t3 �. Wir erhalten also die Behauptung �SQ1 � �SQ2 � �Q1 Q2 � = �t1 � = �t2 � = = �t3 � = . �SP1 � �SP2 � �P1 P2 � 1.1.2 Satz (Umkehrung des Strahlensatzes) Wir betrachen die gleiche geometrische Situation wie in Satz 1.1.1, allerdings möchten wir die Lage der Geraden G∗1 , G∗2 zueinander untersuchen. Das heißt sie sind nicht notwendig parallel. Gilt nun �SP1 � �P1 P2 � �SP2 � = = , �SQ1 � �Q1 Q2 � �SQ2 � so liegt einer der beiden Fälle vor: (1) G∗1 , G∗2 sind parallel (2) a) G∗1 , G∗2 sind nicht parallel, b) der Winkel zwischen G1 , G2 ist ein rechter und c) für genau ein i(= 1 oder 2) liegt S zwischen Pi und Qi . Beweis: Wie im Beweis von Satz 1.1.1 haben wir Q1 = S + t1 (P1 − S), TU Dortmund Q2 = S + t2 (P2 − S), Datum: 18.10.2016 Seite 6 Elementare Geometrie: Teil I also Q1 − S = t1 (P1 − S), Q2 − S = t2 (P2 − S). Damit gilt durch Umstellung �t1 � = �SQ1 � �SP1 � = nach Voraussetzung und wir tre↵en auf zwei mögliche Fälle: �SQ2 � = �t2 � �SP2 � 1.Fall: Die Parameter t1 , t2 sind gleich, es gilt also t1 = t2 . Daraus erhalten wir Q1 = S + t1 (P1 − S), hieraus folgt wiederum Q2 = S + t1 (P2 − S), Q1 − Q2 = t1 (P1 − P2 ). Daraus erschließt sich, dass die Geraden G∗1 , G∗2 parallel sind. 2.Fall: Die Parameter sind ungleich, es gilt also t1 = −t2 . Daraus erhalten wir Q1 = S + t1 (P1 − S), hieraus folgt wiederum Q2 = S + t1 (S − P2 ), (Q1 − S) + (Q2 − S) = t1 (P1 − P2 ). Durch die Voraussetzung und die letzte Gleichung erhalten wir �t1 � = �SQ1 � �Q1 Q2 � = , �SP1 � �P1 P2 � �(Q1 − S) + (Q2 − S)� = �t1 ��P1 P2 � = �Q1 Q2 �. � ∶= Q1 − S, �b ∶= Q2 − S. Wir stellen Q1 − S, Q2 − S als Vektoren dar. Betrachten also a Nun drücken wir die letzte Gleichung mit Hilfe dieser gegebenen Vektoren aus �� a + �b� = �� a − �b�. Wir wollen aus der letzten Gleichung schließen, dass die Vektoren orthogonal sind. TU Dortmund Datum: 18.10.2016 Seite 7 Elementare Geometrie: Teil I � ⊥ �b ⇔ �� Beweis: Es gilt a a, �b� = 0 Da wir uns im euklidischen Raum befinden, gilt bei der Vektorenrechnung das Standardskalarprodukt. Wir betrachten also �� a + �b� = �� a − �b� ⇔ �� a + �b�2 = �� a − �b�2 ⇔ �(� a + �b), (� a + �b)� = �(� a − �b), (� a − �b)� �� + 2�� �� − 2�� ⇔ �� a, a a, �b� + ��b, �b� = �� a, a a, �b� + ��b, �b� Fassen wir die Gleichung zusammen, so erhalten wir 4�� a, �b� = 0 Damit diese Gleichung erfüllt ist, muss nun �� a, �b� = 0 sein. Die Vektoren sind also orthogonal zu einander. � und �b orthogonal sind, ist der Winkel Da wir eben bewiesen haben, dass die Vektoren a an der Spitze S zwischen den Geraden G1 , G2 ein rechter. ⇒ Fall 2a) und 2b) Des Weiteren gilt Q1 − S = t1 (P1 − S), Q2 − S = −t1 (P2 − S) Abbildung 3: Darstellung des zweiten Falls der Umkehrung des Strahlensatzes TU Dortmund Datum: 18.10.2016 Seite 8 Elementare Geometrie: Teil I Wir legen nun den Punkt S in den Koordinatenursprung (0, 0), die Gerade G1 auf die y-Achse, den Punkt P1 legen wir in (0, 1). Dann befindet sich der Punkt Q1 in (0, t1 ) und die Gerade G2 wird durch die x-Achse dargestellt. Nun lassen sich die verbleibenden Punkte durch eine positive Konstante a parametisieren. Es gilt P2 = (a, 0), Q2 = (−at1 , 0). Diese Geradenkonfiguration erfüllt ebenfalls die Relation des Strahlensatzes, denn es gilt: 1 �SP2 � �SP1 � = = �SQ1 � �t1 � �SQ2 � und ⇒ Fall 2c) �P1 P2 � �(0, 1) − (↵, 0)� �(−↵, 1)� = = �Q1 Q2 � �(0, t1 ) − (−↵t1 , 0) �(↵t1 , t1 )� √ √ ↵ 2 + 12 ↵ 2 + 12 1 =� =√ = . 2 2 2 2 ↵ + 1 ⋅ �t1 � �t1 � (↵t1 ) + t1 Schlussfolgerung: Ist der Winkel zwischen G1 , G2 am Schnittpunkt S kein rechter Winkel und gilt �SP1 � �P1 P2 � �SP2 � = = , �SQ1 � �Q1 Q2 � �SQ2 � so sind G∗1 , G∗2 parallel. 1.2 Satz von Pappos Mit Hilfe des Satz von Pappos lässt sich aus der Parallelität zweier Geradenpaare die Parallelität eines dritten Geradenpaares erschließen. Diese Folgerung ist auch für den Satz von Desargues, welcher nach diesem Satz folgt, von Relevanz. Für ↵ = 1, 2 stellen G↵ Geraden dar und für , = 1, 2, 3 P , Q Punkte. Außerdem seien G(P , Q ) die Geraden zwischen den entsprechenden Punkten. Wir betrachten nun den Satz: TU Dortmund Datum: 18.10.2016 Seite 9 Elementare Geometrie: Teil I Seien G1 , G2 Geraden. Es gilt P1 , P2 , P3 ∈ G1 ∧ ∉ G2 und Q1 , Q2 , Q3 ∈ G2 ∧ ∉ G1 . Gilt nun G(P2 , Q1 ) ∥ G(P3 , Q2 ) und G(P1 , Q2 ) ∥ G(P2 , Q3 ), so gilt ebenfalls G(P1 , Q1 ) ∥ G(P3 , Q3 ). Die Abbildung zeigt eine mögliche Lagebeziehung der jeweiligen Geraden: Abbildung 4: Darstellung des Satzes von Pappos TU Dortmund Datum: 18.10.2016 Seite 10 Elementare Geometrie: Teil I Beweis. Für die Lage der Geraden G1 , G2 liegen zwei mögliche Fälle vor, entweder schneiden sie sich in einem Punkt S oder sie sind parallel zueinander. 1.Fall (G1 ∦ G2 ⇒ ∃S ∈ R2 ∶ G1 ∩ G2 = S): Bezogen auf den Schnittpunkt lassen sich die Punkte mit i = 2, 3 wie folgt darstellen Pi − S = ti (P1 − S), Qi − S = si (Q1 − S). Da nach Voraussetzung G(P1 , Q2 ) ∥ G(P2 , Q3 ) existiert eine Zahl a ∈ R mit P1 − Q2 = a(P2 − Q3 ). Hieraus erhalten wir nun (P1 − S) − (Q2 − S) = P1 − Q2 = a(P2 − Q3 ) = a((P2 − S) − (Q3 − S)) = a(t2 (P1 − S) − s3 (Q1 − S)). Da die Punkte P1 , Q1 und S nicht auf einer Geraden liegen, müssen die Koeffizienten in der letzten Gleichung gleich Null sein. Es gilt also durch dass (P1 − S) − (Q2 − S) = (P1 − S) − s2 (Q1 − S) = a(t2 (P1 − S) − s3 (Q1 − S)) at2 = 1, as3 = s2 . bs2 = 1, bt3 = t2 . t2 1 = , b ab s3 = Die zweite Voraussetzung der Parallelität folgender Geraden G(P2 , Q1 ) ∥ G(P3 , Q2 ) wird analog ausgewertet. Man erhält so Durch Gleichsetzung erhält man nun t3 = Es gilt also t3 = s3 . Woraus wiederum s2 1 = . a ab P3 − Q3 = (P3 − S) − (Q3 − S) = t3 (P1 − S) − s3 (Q1 − S) = t3 (P1 − Q1 ) folgt. Das heißt, die Geraden G(P1 , Q1 ) und G(P3 , Q3 ) sind parallel. TU Dortmund Datum: 18.10.2016 Seite 11 Elementare Geometrie: Teil I 2.Fall (G1 ∥ G2 ): Die Geraden G1 , G2 lassen sich aufgrund der Parallelität mit dem gemeinsamen Richtungsvektor v� darstellen. Es gilt also Pi = P1 + ti v�, Qi = Q1 + si v�. Basierend auf der Parallelität gilt P1 − Q2 = a(Q3 − P2 ), außerdem gilt P1 − Q1 = (P1 − Q2 ) − (Q1 − Q2 ) = a(P2 − Q3 ) + s2 v� = a(P1 + t2 v� − Q1 − s3 v�) + s2 v�. Wir stellen auch diese Gleichung um P1 − Q1 = a(P1 + t2 v� − Q1 − s3 v�) + s2 v� ⇔ P1 − Q1 = aP1 + at2 v� − aQ1 − as3 v� + s2 v� ⇔ P1 − Q1 − aP1 + aQ1 = (at2 − as3 + s2 )� v ⇔ (1 − a)(P1 − Q1 ) = (s2 − as3 + at2 )� v. Auch in diesem Beispiel müssen wie oben alle Koeffizienten ungleich Null sein. Folglich muss a = 1 gelten, genauer bedeutet das P 1 − Q 2 = P2 − Q 3 . Die zweite Voraussetzung der Parallelität folgender Geraden G(P2 , Q1 ) und G(P3 , Q2 ) wird analog ausgewertet, hier erhalten wir b = 1, dies bedeutet genauer P 2 − Q 1 = P3 − Q 2 . Durch Subtrahieren der Gleichungen erhält man folgendes Ergebnis P1 − Q 2 = P 2 − Q 3 P2 − Q 1 = P 3 − Q 2 ⇔ −Q2 = P2 − Q3 − P1 P2 − Q 1 = P 3 − Q 2 ⇔ P2 − Q 1 = P 3 + P2 − Q 3 − P 1 ⇔ Q 3 − Q 1 = P 3 − P1 . TU Dortmund Datum: 18.10.2016 Seite 12 Elementare Geometrie: Teil I Wir erhalten das gewollte Resultat, dass die Geraden G(P1 , Q1 ) und G(P3 , Q3 ) ebenfalls parallel sind. 1.3 Satz von Desargues Wir betrachten nun drei Geraden G1 , G2 , G3 , welche sich wieder in einem Punkt S schneiden. Folglich gilt G1 ∩ G2 ∩ G3 = {S}. Weiterhin seien A, A′ ∈ G1 , B, B ′ ∈ G2 und C, C ′ ∈ G3 , also zwei von S verschiedene Punkte auf der jeweiligen Geraden. Sind die Strecken AB und A′ B ′ parallel, BC und B ′ C ′ ebenfalls, so sind die Strecken AC und A′ C ′ gleichfalls parallel. Die folgende Abbildung zeigt eine mögliche Lagebeziehung der drei Geraden: Abbildung 5: Darstellung des Satzes von Desargues Beweis: Wir legen S = (0, 0) in den Koordinatenursprung und die Gerade G1 auf die x-Achse. Da S, B, und B ′ auf G2 liegen und S, C, und C ′ auf G3 liegen, lassen sich die Punkte wie folgt festlegen: A = (a, 0), A′ = (a′ , 0), B = (b1 , b2 ), B ′ = (b1 , b2 ), C = (c1 , c2 ), C ′ = (c1 , c2 ). Da AB ∥ A′ B ′ existiert eine Zahl ↵ ∈ R mit (B ′ − A′ ) = ↵(B − A). Es folgt also b1 − a′ = ↵(b1 − a), TU Dortmund b2 = ↵b2 . Datum: 18.10.2016 Seite 13 Elementare Geometrie: Teil I Da die Punkte B, B ′ nicht auf G1 , also nicht auf der x-Achse, liegen, muss b2 ≠ 0 gelten. Durch AB ∥ A′ B ′ folgt nun ↵ = . Vor allem gilt a′ = a = ↵a. Nutzen wir die zweite Voraussetzung analog aus. Durch BC ∥ B ′ C ′ existiert eine Zahl ∈ R mit (C ′ − B ′ ) = (C − B). Es folgt also ( − )c1 + ( − )b1 = 0, ( − )c2 − ( − )b2 = 0. Falls die Zahlen ( − ), ( − ) nicht Null wären, so müsste das Paar (b1 , b2 ) proportional zu dem Paar (c1 , c2 ) sein. Hierfür müssten jedoch die Geraden G2 und G3 identisch sein, da alle drei Geraden durch den Punkt S = (0, 0) verlaufen. Es ist also nur = = = ↵ möglich. Hieraus folgt nun C ′ − A′ = (c1 , c2 ) − (a′ , 0) = ↵(c1 , c2 ) − ↵(a, 0) = ↵(C − A) Dies entspricht der Behauptung des Satzes. 1.4 Satz von Thales Wir betrachten nun den Satz von Thales in der Ebene E 2 . Wir betrachten den Strahlensatz 1.1.1 für G∗1 , G∗2 , G∗3 , wobei G∗1 ∥ G∗2 ∥ G∗3 . Außerdem sollen G∗1 , G∗2 , G∗3 die Geraden G1 , G2 schneiden, wobei G1 ∩ G2 = S. Die Schnittpunkte bezeichnen wir für ↵ = 1, 2 mit G1 ∩ G∗↵ = P↵ , G2 ∩ G∗↵ = Q↵ . Nun gilt folgende Relation, in welcher der Punkt S nicht mehr vorkommt �P1 P2 � �Q1 Q2 � = . �P1 P3 � �Q1 Q3 � Die folgende Abbildungen zeigen mögliche Lagebeziehungen der Geraden: TU Dortmund Datum: 18.10.2016 Seite 14 Elementare Geometrie: Teil I Abbildung 6: Erste Lagemöglichkeit der Geraden des Satzes von Thales Abbildung 7: Zweite Lagemöglichkeit der Geraden des Satzes von Thales TU Dortmund Datum: 18.10.2016 Seite 15 Elementare Geometrie: Teil I Beweis: Wir betrachten zunächst eine Lagebeziehung wie in Abbilung sechs und wenden den Strahlensatz 1.1.1 auf die entsprechenden Geraden an. 1.Fall Zunächst betrachten wir die Lagemöglichkeiten der Geraden wie in Abbildung sechs. Wir beginnen mit den Geraden G∗1 , G∗2 . Aus folgt zunächst Hieraus folgt wiederum (I) �SP2 � �SQ2 � = �SP1 � �SQ1 � �SP1 � + �P1 P2 � �SQ1 � + �Q1 Q2 � = . �SP1 � �SQ1 � �P1 P2 � �SP1 � = �Q1 Q2 � �SQ1 � . Wenden wir den Strahlensatz auf G∗1 , G∗3 an, so erhält man durch analoges Vorgehen die Gleichung �P1 P3 � �Q1 Q3 � (II) �SP1 � = �SQ1 � . Aus den Gleichungen in I und II erhalten wir direkt die gewollte Relation �P1 P2 � �Q1 Q2 � = . �P1 P3 � �Q1 Q3 2. Fall Betrachten wir nun die Lagemöglichkeiten der Abbildung sieben. Wir nutzen den Strahlensatz 1.1.1 zunächst für die Geraden G∗1 , G∗2 Aus folgt zunächst Hieraus folgt wiederum �SP2 � �SQ2 � = �SP1 � �SQ1 � �P1 P2 � − �SP1 � �Q1 Q2 � − �SQ1 � = . �SP1 � �SQ1 � �P1 P2 � �Q1 Q2 � = . �SP1 � �SQ1 � Wir erhalten also die gleiche Gleichung wie im 1.Fall in der Gleichung I. Da die Gleichung II ebenfalls für die Lagemöglichkeit in Abbildung sieben gilt, erhalten wir ebenfalls die gewollte Relation. TU Dortmund Datum: 18.10.2016 Seite 16 Elementare Geometrie: Teil I 2 Das Dreieck Das Dreieck stellt einen weiteren wichtigen Bestandteil der Elementargeometrie dar. Wir bezeichnen zunächst ein Dreieck um eine grundsätzliche Regelung in der Bezeichnung zu haben. Daraufhin werden die Innen- und Außenwinkel in einem Dreieck und der Satz des Pythagoras genauer untersucht. 2.1 Bezeichnung Ein Dreieck mit den Eckpunkten A, B, C wird im Folgenden mit △(A, B, C) bezeichnet. Die den Eckpunkten gegenüberliegenden Seiten und deren Längen werden mit a, b, c �, �b, c� gekennzeichnet. bezeichnet. Die entsprechenden Vektoren werden wiederum mit a Nun gilt � + �b = c� a und a < b + c, b < a + c, c < a + b. Als letzte grundlegende Bezeichnung des Dreiecks betrachten wir die Höhen, welche senkrecht auf den drei Seiten stehen und durch den gegenüberliegenden Punkt verlaufen. Wir bezeichnen diese, abhängig von den jeweiligen Seiten mit ha , hb , hc . � + �b = c� gilt, kann das Skalarprodukt nur durch die Da, wie oben bereits beschrieben, a Längen des Dreiecks ausgedrückt werden. Folglich gilt: 1 1 ��b, c�� = (��b�2 + �� c�2 − ��b − c��2 ) = (��b�2 + �� c�2 − �� a�2 ). 2 2 Diese Gleichung zeigen wir direkt mit Hilfe des Standardskalarprodukts 1 �2 1 � − c��) (�b� + �� c�2 − ��b − c��2 ) = (��b, �b� + �� c, c�� − ��b − c�, a 2 2 1 1 ⇔ (��b, �b� + �� c, c�� − (��b, �b� − �2�b, c�� + �� c, c��)) = (2��b, c��) = ��b, c��. 2 2 Im nächsten Teil kommen wir zu wichtigen Eigenschaften des Dreiecks, nämlich den Winkeln, welche wir vor allem für spätere Sätze benötigen. Nach der grundlegenden Bezeichnung dieser Winkel und wichtigen Regelungen wird eine Abbildung folgen, welche diese bereits vorgestellten Bezeichnungen enthält. TU Dortmund Datum: 18.10.2016 Seite 17 Elementare Geometrie: Teil I 2.2 Winkel in Dreiecken Der Innenwinkel des Punktes A wird mit ↵ bezeichnet. Entsprechend werden die Winkel an den Punkten B und C mit und bezeichnet. Der Außenwinkel des Punktes A wird mit ↵′ gekennzeichnet. Entsprechend werden die Außenwinkel an den Punkten B und C mit ′ und ′ gekennzeichnet. Für die Summe der Innen- und Außenwinkel gilt nach Definition immer ↵+↵′ = ⇡. Die folgende Abbildung zeigt die jeweiligen Konstruktionen und die Bezeichnungen aus 2.1: Abbildung 8: Konstruktion des Dreiecks und dessen Bezeichnung TU Dortmund Datum: 18.10.2016 Seite 18 Elementare Geometrie: Teil I 2.2.1 Satz (Kosinus- und Sinussatz) Wir möchten nun eine Gleichung aufstellen, mit welcher man den Winkel an dem Punkt A mit Hilfe der Seiten b, c berechnen kann. Für diese Gleichung verwenden wir, dass 2 2 2 ��b, c�� = b +c2 −a ist. Es gilt cos ↵ = ��b, c�� b2 + c2 − a2 = . bc 2bc Man nennt diese Formel auch Kosinussatz. Den sogenannten Sinussatz erhält man durch einfaches Umstellen und mit Hilfe der Gleichung 1 = cos2 ↵ + sin2 ↵ −a4 − b4 − c4 + 2b2 c2 + 2a2 c2 + 2a2 b2 . 4b2 c2 Die letzte Gleichung erhalten wir, indem wir die cos ↵ quadrieren und das Ergebnis 2 von 1 subtrahieren. Zunächst soll dieser Ausdruck für sina2 ↵ symmetrisch in a, b, c sein. Folglich haben wir zunächst ⇔ sin2 ↵ = 1 − cos2 ↵ = sin2 ↵ sin2 sin2 = = . a2 b2 c2 Nach der Bezeichnung in 2.1 liegen die Innenwinkel des Dreiecks im Intervall [0, ⇡]. Nach Definition der Sinuskurve sind diese im gegebenen Intervall positiv. Ebenfalls sind die Längen a, b, c positiv. Es folgt also sin ↵ sin = a b = sin , c diese Beziehung bezeichnen wir mit Sinussatz. Die Innenwinkelsumme des Dreiecks beträgt immer ⇡, das heißt die Gleichung ↵ + + = ⇡ muss in einem Dreieck mit ↵, , ∈ △(A, B, C) immer gelten. 2.2.2 Definition Ein Dreieck heißt gleichschenklig, wenn zwei seiner Seiten die gleiche Länge haben. Diese beiden Seiten werden auch Schenkel genannt, die dritte Seite wird als Basis bezeichnet. Ein Dreieck heißt gleichseitig, wenn alle drei Seiten die gleiche Länge haben. Ein Dreieck, das einen rechten Winkel enthält heißt rechtwinklig. TU Dortmund Datum: 18.10.2016 Seite 19 Elementare Geometrie: Teil I 2.2.3 Satz Ein Dreieck ist genau dann gleichschenklig, wenn zwei Innenwinkel gleich sind. Beweis: Wir wollen beweisen, dass folgende Aussage gilt: △(A, B, C) gleichschenklig ⇔ ↵ = , ↵ = oder = “ ⇒ “ stimmen zwei Seiten des Dreiecks überein, so folgt die Gleichheit zweier Winkel direkt aus dem Kosinussatz, indem man die beiden gleichen Seiten einsetzt. “ ⇐ “ Gelte nun cos ↵ = cos , dann erhalten wir die Gleichung 0 = cos ↵ − cos = Kosinussatz b2 + c2 − a2 a2 + c2 − b2 − 2bc 2ac = gleichnamig machen (a − b)(c2 − (a + b)2 ) . 2abc In der Bezeichnung aus 2.1 haben wir festgestellt, dass c < a + b, da die Eckpunkte des Dreiecks ansonsten auf einer Geraden liegen müssten. Also ist ebenfalls c2 < (a + b)2 . Folglich gilt auch c2 − (a + b)2 < 0. Da die Gleichung 0 = cos ↵ − cos besteht und die Gleichung erfüllt sein soll, muss a = b sein. Im Fall ↵ = oder = verläuft der zweite Teil des Beweises analog. 2.2.4 Satz Ein Dreieck ist genau dann gleichseitig, wenn alle drei Innenwinkel gleich sind, das heißt ↵ = = = ⇡3 . Beweis: Der Beweis erschließt sich durch mehrfache Anwendung des Beweises Satz aus 2.2.3. 2.2.5 Satz (Innen- und Außenwinkel) Jeder Innenwinkel eines Dreiecks ist echt kleiner als die beiden Außenwinkel der anderen Innenwinkel. Veranschaulichung: Wir wollen den Innenwinkel ↵ betrachten, dann gilt nach dem Satz von Innen- und Außenwinkeln ↵ < ′ und ↵ < ′ . Dies gilt ebenfalls für die anderen beiden Innenwinkel. TU Dortmund Datum: 18.10.2016 Seite 20 Elementare Geometrie: Teil I Beweis: Durch den Kosinussatz gilt cos ↵ = ′ Für den Außenwinkel Nun berechnen wir ′ cos = a2 + c 2 − b 2 . 2ac erhalten wir nun durch die Summe der Innen- und Außenwinkel cos 2(cos ↵ − cos b 2 + c 2 − a2 , 2bc )= ′ = cos(⇡ − ) = −cos b 2 + c 2 − a2 a2 + c 2 − b 2 + bc ac =− a2 + c 2 − b 2 . 2ac = gleichnamig machen (a + b)(c2 − (a − b)2 ) . abc Wir verwenden nun die Cauchy-Schwarz-Ungleichung um den letzten Term abzuschätzen. �, �b nicht proportional sind. Die Hier muss jedoch beachtet werden, dass die Vektoren a Cauchy-Schwarz-Ungleichung besagt, dass das Skalarprodukt zwischen zwei Vektoren echt kleiner ist als das Produkt der Länge der gleichen Vektoren. Es gilt also �� a, �b� < �� a���b� Damit gilt wiederum ⇔ − �� a���b� < �� a, �b� < �� a, �b�. (a − b)2 = �� a�2 − 2�� a���b� + ��b�2 < �� a + 2�� a, �b� + ��b�2 = �� a + �b�2 = �� c�2 = c2 . Wir erhalten also, dass die Di↵erenz cos ↵ − cos ′ echt größer Null, also positiv ist. Da die Kosinusfunktion im Intervall [0, ⇡] fallend ist, folgt, dass ↵ echt kleiner ′ sein muss. Dies können wir direkt in Abbildung neun sehen. 2.3 Beziehungen zwischen Winkeln und Seiten Wie man bereits anhand der Beweise im Kapitel 2.2 erkennen kann, bestehen wichtige Beziehungen zwischen den Winkeln eines Dreiecks und dessen Seiten. Im Folgenden werden wir wichtige Sätze betrachten, welche sich hiermit befassen. 2.3.1 Satz (Satz des Pythagoras) Der Innenwinkel eines Dreiecks ist genau dann ein rechter, wenn die Gleichung a2 + b 2 = c 2 TU Dortmund Datum: 18.10.2016 Seite 21 Elementare Geometrie: Teil I erfüllt ist. Beweis: Der Beweis erschließt sich ein weiteres Mal direkt aus dem Kosinussatz. “⇒“ Ein rechter Winkel liegt an dem Punkt C vor, genau dann, wenn = ⇡2 ist. Durch 2 2 −c2 den Kosinussatz muss also a +b = cos ⇡2 gelten. Mittels der Kosinuskurve lässt sich 2ab erkennen, dass genau dann ⇡2 beträgt, wenn cos = 0 ist. 2 2 −c2 Folglich muss a +b = 0 sein. Die Gleichung lässt sich umschreiben: 2ab a2 b2 c2 a2 b2 c2 a2 + b 2 c2 + − =0 ⇔ + = ⇔ = 2ab 2ab 2ab 2ab 2ab 2ab 2ab 2ab ⇔ a2 + b 2 = c 2 . “⇐“ Sei nun die Gleichung a2 + b2 = c2 erfüllt. Wir wollen also zeigen, dass der Winkel = ⇡2 sein muss. Durch Umstellen der Gleichung erhalten wir a2 + b2 − c2 = 0. Setzen wir 2 2 −c2 diese Gleichung in den Kosinussatz ein, so erhalten wir cos = a +b = 0. Anhand der 2ab Kosinuskurve lässt sich wieder erkennen, dass cos = 0 ist, wenn = ⇡2 Abbildung 9: Kosinuskurve Für die kommenden zwei Sätze betrachten wir ein rechtwinkliges Dreieck △(A, B, C). Der rechte Winkel befindet sich am Punkt C, von diesem Eckpunkt soll nun eine orthogonale Linie auf die gegenüberliegende Seite c gezogen werden. Den Punkt, an dem die Senkrechte auf die Seite c tri↵t, bezeichnen wir mit F. Die folgende Abbildung zeigt diese Konstruktion: TU Dortmund Datum: 18.10.2016 Seite 22 Elementare Geometrie: Teil I Abbildung 10: Rechtwinkliges Dreieck mit winkelhalbierender Senkrechten 2.3.2 Satz (Kathetensatz) In einem rechtwinkligen Dreieck gilt a2 = �BC�2 = �BF �c, b2 = �AC�2 = �AF �c. Beweis: Wir nutzen für den Beweis den Satz des Pythagoras und wenden diesen auf die drei entstandenen rechtwinkligen Dreiecke △(A, B, C), △(A, C, F ) und △(B, C, F ) an. Es gilt also a2 + b2 = c2 , h2 + �AF �2 = b2 , �BF �2 + h2 = a2 . Des Weiteren gilt �AF � + �BF � = c. Wir addieren nun die erste und die dritte Gleichung und erhalten 2a2 = c2 −b2 + h2 +�BF �2 = c2 − �AF �2 + �BF �2 . ��� � � � � �� � � � � � � Da c = �AF � + �BF � gilt, folgt −�AF �2 2a2 = �AF �2 + 2�AF ��BF � + �BF �2 − �AF �2 + �BF �2 = 2�AF ��BF � + 2�BF �2 . Die letzte Gleichung können wir nun wieder zurück umstellen, wir erhalten also 2a2 = 2( �AF � �BF � + �BF �2 ) = 2�BF �c − 2�BF �2 + �BF �2 = 2�BF �c � c−�BF � TU Dortmund Datum: 18.10.2016 Seite 23 Elementare Geometrie: Teil I ⇒ a2 = �BC�2 = �BF �c. Dies entspricht der ersten Behauptung des Satzes. Die zweite Gleichung wird analog gezeigt. 2.3.3 Satz (Höhensatz) In einem rechtwinkligen Dreieck gilt die Gleichung h2 = �AF ��BF �. Beweis: Den Beweis für diesen Satz erhält man analog zu dem Beweis des Satzes 2.3.2: h2 = b2 −�AF �2 = c2 − a2 − �AF �2 = �AF �2 + 2�AF ��BF � + �BF �2 − �AF � − a2 �2 2 c −a h2 = 2�AF ��BF � + �BF �2 − ⇒ 2h2 = 2�AF ��BF � ⇔ h2 = �AF ��BF �. TU Dortmund a2 � 2 h +�BF �2 = 2�AF ��BF � − h2 Datum: 18.10.2016 Seite 24