Seminar 6
Werbung

Ergänzende Materialien zum Seminar
Theoretische Mechanik
WS 2005/06
Dörte Hansen
4. Dezember 2005
1 Lagrangepunkte oder: Das restringierte 3-Körper-Problem
der Himmelsmechanik
1.1 Motivation
Die Trojaner sind ein längst untergegangenes Volk der Vorzeit? Irrtum! Es gibt sie noch
heute! Schon seit dem Ende des 18. Jahrhundert vermutete man die Existenz dieser
kleinen Himmelskörper, ohne dass es jedoch gelang, sie durch direkte Beobachtungen
nachzuweisen. Nach den Berechnungen der Mathematiker Euler und Lagrange sollte es
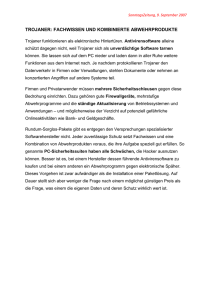
im gemeinsamen Gravitationsfeld von Jupiter und Sonne insgesamt fünf Punkte geben,
an denen die Kraftwirkung auf einen Testkörper verschwindet. Zwei dieser Punkte sollten
sich auf der Jupiterbahn befinden, und zwar jeweils 60 Grad vor bzw. hinter dem Planeten. Astronomen aus aller Welt konzentrierten sich deshalb auf die Beobachtung dieser
beiden Punkte, doch erst 1906 gelang es dem deutschen Astronom Max Wolf, den ersten
Asteroiden in einem dieser sogenannten Lagrange-Punkte zu entdecken. Heute sind 1691
dieser sogenannten Trojaner“ in den Punkten L4 und L5 bekannt. Die größeren von
”
ihnen tragen die Namen der Helden der Ilias. Astronomen machten dabei möglich, was
in Homers Ilias undenkbar ist: Als Trojaner“ werden nämlich auch die nach den grie”
chischen Helden benannten Asteroiden im Punkt L4 bezeichnet. Hier finden wir sie alle
wieder: Agamemnon, Achilles, Nestor und den listenreichen Odysseus. Die Asteroiden in
L5 hingegen sind nach den Trojanern benannt, so z.B. nach Priamus und Paris. So jagen
die beiden verfeindeten Gruppen einander durch das All, ohne sich jemals einholen zu
können.
In den letzten 100 Jahren fand man auch in den Lagrangepunkten L4 und L5 anderer
Planeten solche seltsamen Begleiter. Der erste marsianische Trojaner“ wurde 1990 von
”
David Levy entdeckt - einige weitere sind seitdem hinzugekommen. Auch im Neptunorbit
befinden sich einige dieser merkwürdigen Trojaner“, doch soweit müssen wir gar nicht
”
gehen. Selbst unsere Erde hat einige dieser Begleiter, aber in der Erdbahn bewegen sich
1
L4
L3
L1
L2
PSfrag replacements
L5
Abbildung 1: Zur Definition der Lagrangepunkte.
noch viel seltsamere Himmelskörper. Einer von ihnen ist der Plaetoid 3753 Cruithne.
Cruithne befindet sich nicht in einem der Lagrangepunkte L4 und L5, sondern bewegt
sich auf einer komplizierten Bahn, die im mitrotierenden Erde-Sonne System wie ein zu
gross geratener Pferdehuf erscheint. Wie aber kann es dazu kommen, dass sich kleinere
Himmelskörper auf ein und derselben Bahn wie ein Planet bewegen, ohne von diesem
verschluckt“ zu werden? Dieser Frage wollen wie uns im Folgenden zuwenden.
”
1.2 Das restringierte 3-Körper-Problem der Himmelsmechanik
Um die Existenz der Trojaner“ zu verstehen, müssen wir die Bewegung einer Testmas”
se m3 im gemeinsamen Gravitationsfeld von Planet und Sonne untersuchen. Es handelt
sich somit um ein typisches 3-Körper-Problem, von dem wir wissen, dass es im allgemeinen analytisch nicht lösbar ist. Für unsere Betrachtungen jedoch ist noch etwas anderes
wichtig: Alle oben erwähnten Systeme sind nämlich hierarchische System mit sehr unterschiedlichen Massen m1 m2 m3 . In der Tat stellt sich heraus, dass die Bedingung
m1 m2 entscheidend für die Frage nach der Stabilität der Lagrangepunkte ist1 . Wir
werden im folgenden allerdings keine Forderung an das Verhältnis der Massen m1 und
m2 stellen, sondern nehmen lediglich an, dass m 1 , m2 m3 gelten soll. Die Bewegung
von m1 und m2 bleibt damit unbeeinflußt von der gravitativen Wechselwirkung mit m 3
1
Der entsprechende Beweis ist äußerst kompliziert und gelang erst mit Hilfe allgemeinrelativistischer
Formulierungen.
2
(m3 wird deshalb als Testmasse bezeichnet). Auch die Lage des Schwerpunktes wird
allein durch m1 und m2 bestimmt. Im Schwerpunktsystem ist
m1 r1 + m2 r2 = M s = 0,
r1 = −
m2
r2 .
m1
Es ist zweckmäßig, für die folgenden Betrachtungen die Relativkoordinate R = r 1 − r2
einzuführen, und r1 bzw. r2 mit Hilfe dieser Relativkoordinate wie folgt auszudrücken:
r1 = −
m2
m2
r2 =
(R − r1 )
m1
m1
=⇒
r1 = (m2 /M )R
r2 = −(m1 /M )R
(1)
Ferner wissen wir, dass die Winkelgeschwindigkeit ω = ϕ̇ des Binärsystems Sonne-Planet
durch
ω2 =
GM
R3
(2)
gegeben ist. Nun sieht“ der Asteroid m3 aber ein mit der Winkelgeschwindigkeit ω ro”
tierendes Gravitationspotential. Er bewegt sich also in einem rotierenden Bezugssystem,
in dem zusätzlich zur Gravitationskraft der beiden Massen m 1 und m2
Fg = −
Gm3 m2
Gm3 m1
(r3 − r1 ) −
(r3 − r2 )
3
|r3 − r1 |
|r3 − r2 |3
(3)
sogenannte Scheinkräfte“ wirksam werden. Allgemein wird die Dynamik eines Körper
”
in einem rotierenden Bezugssystem durch die Bewegungsgleichunug
mr̈0 = F(IS) − 2mω ∧ ṙ0 − mω ∧ (ω ∧ r0 ) − mω̇ ∧ r0 ,
wobei wenn die Ursprünge von Inertialsystem und rotierendem Koordinatensystem zusammenfallen, r = r0 gilt. In unserem Fall ist ω die in Gl. (2) gegebene Winkelgeschwindigkeit, die senkrecht auf der Bahnebene und damit auch auf r 03 stehen soll. Der Beitrag
der Zentrifugalkraft vereinfacht sich dann zu
FZ = −mω ∧ (ω ∧ r03 ) = −ω(ω · r03 ) + ω 2 r03 = ω 2 r03 .
(4)
Vernachlässigen wir ω̇, so nimmt die Bewegungsgleichung der Testmasse die folgende
Form an:
F(r03 ) = mr̈03 = −
Gm3 m1 0
Gm3 m2 0
(r3 − r01 ) − 0
(r − r02 ) + m3 ω 2 r03 − 2m3 ω ∧ ṙ03 . (5)
0
0
3
|r3 − r1 |
|r3 − r02 |3 3
Es ist sofort offensichtlich, dass für dieses System aus drei Massenpunkten der Energieerhaltungssatz erfüllt ist. Das bedeutet jedoch nicht, dass alle auftretenden Kräfte
konservativ sind und damit ein Potential besitzen. In der Tat ist zwar für die Corioliskraft
Fc · ṙ0 = −2m(ω ∧ ṙ0 ) · ṙ0 = 0,
3
(die Corioliskraft steht immer senkrecht auf der Geschwindigkeit), und außerdem gilt
∇ ∧ Fc = 0. Dennoch kann man dieser Kraft kein Potential zuordnen. Dieses würde
von der Geschwindigkeit abhängen, was im Rahmen der klassischen Mechanik nicht
zulässig ist. Man kann sich natürlich auch explizit das für den Massenpunkt m spürbare“
”
Potential herleiten. Dazu multipliziert man (5) skalar mit ṙ03 , so dass
2 0 0
Gm3 m2 0
Gm3 m1 0
0
0
0
0
0
0
0
(r
−
r
)
+
(r
−
r
)
·
ṙ
+
m
ω
r
·
ṙ
−
(ω
·
r
)(ω
·
ṙ
)
r̈3 · ṙ3 = −
3
3
1
3
2
3
3
3
3
3
|r03 − r01 |3
|r03 − r02 |3
− 2m3 (ω ∧ ṙ03 ) · ṙ03 .
{z
}
|
(6)
=0
Der letzte Term verschwindet, da die Corioliskraft zu allen Zeiten senkrecht auf der
Geschwindigkeit ṙ03 steht. Es ist nun offensichtlich, dass sich sowohl die rechte als auch
die linke Seite dieser Gleichung als totale Zeitableitung schreiben lassen. Genauer gesagt,
ist ganz allgemein
d m
d m 2 02
(ω ∧ r0 )2 .
ω r − (ω · r0 )2 =
m ω 2 r0 · ṙ0 − (ω · r0 )(ω · ṙ0 ) =
dt 2
dt 2
Gl. (6) besagt, dass die Energie des Systems eine Erhaltungsgröße ist, denn auf der
rechten Seite der Gleichung steht gerade die totale Zeitableitung des effektiven Potentials
Uef f (r03 ) = −
Gm3 m1
Gm3 m2
m3
− 0
−
(ω ∧ r03 )2 .
0
0
0
|r3 − r1 | |r3 − r2 |
2
(7)
(Im folgenden bezeichne r0 ≡ r03 ). Die Lagrangepunkte entsprechen den Extrema dieses Potentials. Wir müssen also untersuchen, für welche Punkte (x0 , y 0 , z 0 ) die aus dem
effektiven Potential abgeleitete konservative Kraft
Fkons (r0 ) = −
Gmm2 0
Gmm1 0
(r − r01 ) − 0
(r − r02 ) + m ω 2 r0 − (ω · r0 )ω
0
0
3
3
0
|r − r1 |
|r − r2 |
(8)
verschwindet. Da der Drehimpuls des Systems eine Erhaltungsgröße ist, können wir
eine ebene Bewegungs voraussetzen und wählen das Koordinatensystem so, dass der
Vektor der Winkelgeschwindigkeit in z 0 -Richtung zeigt, d.h. er steht senkrecht auf der
Bahnebene. Außerdem können wir bei unserer Suche z 0 = 0 setzen; wenn es Extrema
des Potentials (7) gibt, dann müssen diese in der Bahnebene von m1 und m2 zu finden
sein. Außerdem drücken wir r01 und r02 mit Hilfe der Relativkoordinate R = Re 0x aus
(r01 = αR, r02 = −(α − 1)R). Die für den Massenpunkt spürbare Kraft ist dann
(r0 − αR)m1
(r0 − (α − 1)R)m2
M r0
0
+
− 3 , (9)
Fkons (r ) = −Gm
R
[(x0 − αR)2 + y 02 ]3/2 [(x0 − (α − 1)R)2 + y 02 ]3/2
wobei wir im letzten Schritt ω 2 = GM/R3 eingesetzt haben. Wir formen diese Gleichung
nun so um, dass M außerhalb der Klammer steht,
(r0 − (α − 1)R)α
r0
(r0 − αR)(1 − α)
0
. (10)
Fkons (r ) = −GmM
+
−
[(x0 − αR)2 + y 02 ]3/2 [(x0 − (α − 1)R)2 + y 02 ]3/2 R3
4
Die Extrema des Potentials Uef f entsprechen jenen Punkten, an denen die Kraft (10)
komponentenweise verschwindet. Das bedeutet, unsere Suche nach den Lagrangepunkten
reduziert sich auf die Suche nach den Lösungen des Gleichungssystems
(x0 + (1 − α)R)α
x0
(x0 − αR)(1 − α)
= 0,
+
−
Fkons,x = 0 = −GmM
R3
[(x0 − αR)2 + y 02 ]3/2
[(x0 + (1 − α)R)2 + y 02 ]3/2
(11)
1−α
α
1
Fkons,y = 0 = −GmM y 0
+
− 3 .
0
2
02
3/2
0
2
02
3/2
R
[(x − αR) + y ]
[(x + (1 − α)R) + y ]
(12)
Wir können zwei Fälle unterscheiden.
Fall 1: y 0 ≡ 0
In diesem Fall ist Gleichung (12) automatisch erfüllt. Setzen wir in Gl. (11) y 0 = 0, so
erhalten wir eine transzendente Gleichung für x0 ,
α(x0 + (1 − α)R) ! x0
(1 − α)(x0 − αR)
= 3.
+
R
|x0 − αR|3/2
|x0 + (1 − α)R|3/2
(13)
Es ist unmöglich, eine analytische Lösung dieser Gleichung zu finden. Man kann sich die
Lösungen von Gl. (13) auf graphischem Wege bestimmen. Dazu identifizieren wir die
linke Seite von Gl. (13) mit einer Funktion
f1 (x0 ) =
(1 − α)(x0 − αR)
α[x0 + (1 − α)R]
+
.
|x0 − αR|3/2
|x0 + (1 − α)R|3/2
0
(14)
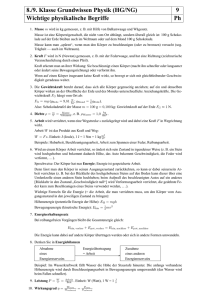
Die Schnittpunkte dieser Funktion mit f 2 (x0 ) = Rx3 sind die gesuchten Lösungen der
Gleichung (13). Es ist leicht zu sehen, dass f 1 (x0 ) für x0 = αR und x0 = −(1 − α)R
singulär wird. Außerdem ist f1 (x0 ) stets kleiner als Null, solange x0 < −(1 − α)R, und
größer als Null für alle x0 > αR. Die graphische Darstellung zeigt, dass jeweils einer der
drei kollinearen Punkte jenseits der Massen m 1 bzw. m2 liegt, während der dritte Lagrangepunkt auf der Verbindungsachse zwischen m 1 und m2 liegt (siehe Abb.). Es zeigt
sich jedoch, dass diese drei Punkte lokalen Maxima des effektiven Potentials entsprechen,
d.h. es handelt sich um instabile Gleichgewichtspunkte.
Fall 2: y 0 6= 0
In diesem Fall folgt aus Gl. (11)
x0
(x0 − αR)(1 − α) (x0 + (1 − α)R)α
+
=
,
3
3
R3
r13
r23
bzw. nach Ausmultiplizieren
α
x0
α(1 − α) α(1 − α)
0 1−α
x
.
+
+
R
−
=
3
3
3
3
R3
r13
r23
r13
r23
5
Da diese Bedingung für alle x0 erfüllt sein muss, folgt sofort
r13 = r23 ,
d.h. der Abstand zwischen m3 und m1 ist genauso groß wie der Abstand zwischen m 3
und m2 . Damit ist
!
2
2
r13
= (x0 − αR)2 + y 02 = (x0 + (1 − α)R)2 + y 02 = r23
woraus sofort
0
x =
1
α−
2
R.
Die entsprechenden y 0 -Werte erhalten wir durch Einsetzen dieses Ergebnisses in (12),
[y 02
α
1
1−α
! 1
+ 02
= 02
= 3
2
3/2
2
3/2
2
3/2
R
+ r /4]
[y + R /4]
[y + R /4]
d.h.
√
3
y =±
R.
2
0
Diese beiden äquilateralen Lösungen
√ !
1
3
R(α − ), ±
R
2
2
(15)
werden üblicherweise mit L4 bzw. L5 bezeichnet. Die Frage, ob diese Punkte stabilen
Gleichgewichtslagen der Testmasse m 2 entsprechen, ist im Rahmen von Stabilitätsanalysen nur sehr schwierig zu beantworten. In der Tat stellt sich heraus, dass die Stabilität
der Gleichgewichtslagen L4 und L5 entscheidend vom Verhältnis der Massen der beiden schweren Himmelskörper abhängt. Nur im Falle eines hierarchischen Systems - d.h.
wenn m1 m2 m3 ist, entsprechen die äquilateralen Lösungen L4 und L5 stabilen
Gleichgewichtslagen.
6
f1 (x)
x
PSfrag replacements
Abbildung 2: Graphische Bestimmung der drei kollinearen Euler-Lagrangepunkte als
Schnittpunkte der Funktionen f1 und f2 .
7