Arbeitswissenschaft II (Arbeitstechnologie und Ergonomie)
Werbung
")
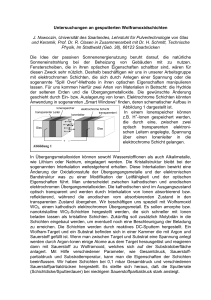
In Mensch-Maschine-Umwelt-Systemen (MMUS, auch soziotechnische Systeme) stehen die Systemkomponenten in enger Wechselwirkung zueinander. Während das Verhalten technischer Systemkomponenten oft hinreichend genau vorhergesagt werden kann, verhalten sich die Umwelt und auch der Mensch häufig nicht so, wie es sich der Gestalter eines MMUS vorgestellt hat. Ungewünschtes, aber vorhersagbares Verhalten lässt sich mit Sicherheitstechnik kompensieren, so dass bspw. ein technisches System im Fehlerfall in einen sicheren Zustand gebracht wird (fail-safe). Dies ist beim Menschen ungleich schwieriger, zumal dieses Fehlverhalten oft dann auftritt, wenn der Mensch z.B. aufgrund des Ausfalls einer technischen Systemkomponente unter Zeit- oder Entscheidungsdruck steht, in einem Moment also, der bei der Systemgestaltung schwer antizipiert werden kann. Gerade in fehleranfälligen Systemen lösten Menschen in der Vergangenheit schwerwiegende Unglücksfälle aus. Dieses so genannte „menschliche Versagen“ (engl. human error) wird beispielsweise in der Luftfahrt in bis zu 70-80% der Unfälle als unfallursächlich angenommen. Häufig stellt der vom Operateur begangene Fehler jedoch „nur“ das letzte Glied einer ganzen Verkettung von Gestaltungs- und technischen Fehlern dar, der dann allerdings zum Unfall führt. Mit Methoden des Cognitive Engineering wird versucht, das menschliche Verhalten zu beschreiben, um es besser vorhersagen und bei der Systemgestaltung berücksichtigen zu können. Das Modell menschlicher Leistung nach Rasmussen wurde im Kontext der Gestaltung von Leitwarten für kerntechnische Anlagen entwickelt. Diese Anlagen verfügen über mehrere tausend verkettete Komponenten meist elektronischer bzw. elektromechanischer Art, so dass das Gesamtsystem nur mit Hilfe komplexer Regelprozeduren effizient, produktiv und vor allem sicher betrieben werden kann. Es werden drei kaskadierte Regulationsebenen differenziert: Das fertigkeitsbasierte Verhalten repräsentiert sensumotorische Leistungen von Handlungen, die ohne bewusste Regulation als automatisierte, gleichmäßige und hochintegrierte Verhaltensmuster auftreten. Das regelbasierte Verhalten zeichnet sich dadurch aus, dass die kognitiven Subroutinen in bekannten Arbeitssituationen durch gespeicherte Regeln bewusst reguliert werden. Diese Regeln wurden empirisch oder anhand von kommunizierten bzw. gelesenen Verhaltensanweisungen gewonnen. In unbekannten, neuartigen Situationen, in denen nicht auf bewährte Handlungsprozeduren zurückgegriffen werden kann, kommt das wissens- bzw. modellbasierte Verhalten zum Tragen. In diesem Fall ist das Ziel aufgrund einer Situationsanalyse und persönlichen Präferenzen explizit formuliert. Es wird ein nützlicher Plan entwickelt, indem Effekte der Alternativpläne im Hinblick auf die Zielerreichung beurteilt werden. Das vorliegende Beispiel beschreibt die Höhensteuerung eines Flugzeuges: Bei einer unvorhergesehenen Situation (Störfall) muss der Pilot durch Überlegungen (Wissen) eine Handlungsstrategie entwickeln. Die aus der Merkmalsformation identifizierten Flugparameter sind Luftdruck, Flughöhe, Geschwindigkeit, Wind- und Temperaturverhältnisse, sowie das Verhalten des Steigratenanzeigers bei neutraler Steuerhornstellung. Durch erlernte Regeln kann daraus direkt auf eine einzustellende Motordrehzahl geschlossen werden. Die Abhängigkeit der Steigneigung von der Fluggeschwindigkeit (Bernoulli Gleichung), kann als Regel aus der Merkmalsformation extrahiert werden. Die Abhängigkeit der Fluggeschwindigkeit von der Motordrehzahl ist zu assoziieren und die Drehzahl ist nachzuführen. Die nur fertigkeitsbasierte Strategie eines Laien, das Flugzeug durch Bewegungen des Steuerhorns auf einer Höhe zu halten, wird bei zu niedriger Motorleistung zu einem Geschwindigkeitsverlust bis hin zum Strömungsabriss führen. Wissensbasiertes Verhalten beinhaltet analytisches Problemlösen und ist langsam, mühsam und erfolgt seriell. Da es das mit begrenzter Kapazität ausgestattete Arbeitsgedächtnis benutzt, treten häufig Fehler auf. Wissensbasiertes Verhalten hat allerdings den Vorteil, dass damit neue Situationen bewältigt werden können. Fertigkeits- und regelbasiertes Verhalten stützen sich auf die Wahrnehmung. Beide Verhaltensweisen sind deshalb schnell, erfordern nur geringe Anstrengungen und erfolgen parallel. Allerdings werden beide nur durch vertraute Situationen aktiviert. Wenn Operateure erfahren und somit mit dem System vertraut sind und die Möglichkeit besteht, die Arbeitsdomäne vollständig zu repräsentieren, sollten Schnittstellen darauf abzielen, die Wirksamkeit der zwei unteren Ebenen der Informationsverarbeitung zu nutzen, weil sie Informationen schneller und sicherer verarbeiten. Faustregeln: • Je unbekannter eine Situation, desto höher ist die kognitive Ebene, auf der das Problemlösen erfolgt. • Je höher die kognitive Ebene menschlichen Entscheidens und Handelns, desto mehr Zeit wird konsumiert. • Durch Training werden Problemlöseprozesse von hohen Ebenen auf niedrigere Ebenen verlagert. • Mangelnde Übung verschiebt Problemlöseprozesse auf höhere Ebenen. Exemplarisch lässt sich der Zusammenhang zwischen Reaktionszeiten und Lernen an dem mit zunehmender Erfahrung effizienteren Orientierungsvermögen in einer unbekannten Stadt verdeutlichen. Im Planungsstadium benötigt man zunächst noch die Unterstützung durch einen Stadtplan, dem man, gestützt durch die horizontalen bzw. vertikalen Koordinaten Norden, Süden, Osten, Westen bzw. oben, unten, rechts, links, Straßennamen, Distanzabschätzungen, wichtige Plätze und Gebäudekomplexe entnimmt (wissensbasiertes Verhalten). Die Abhängigkeit von der Unterstützung durch den Stadtplan lässt sich reduzieren, wenn man sich nach einmaligem Ablaufen der Strecke ausgewählte Punkte bzw. Punktfolgen als Wegmarken auswählt, z.B. „nach dem Passieren des Bahnhofs rechts halten“ oder „an der nächsten Hauptverkehrsstraße links“ etc.(regelbasiertes Verhalten). Mit zunehmender Nutzungsfrequenz der Strecke (mehrmals täglich) entfällt schließlich auch das Erfordernis der bewussten Orientierung an markanten Punkten: Man erreicht sein Ziel selbst dann, wenn man gedanklich mit der Organisation einer Reise befasst ist. Unter Umständen erreicht man dieses auch innerhalb kürzerer Zeit, da das Angewiesensein auf unterstützende externe bzw. interne Hilfsmittel, auf die kontrolliert und bewusst zugegriffen werden musste, entfällt (fertigkeitsbasiertes Verhalten). Einschränkend ist aber darauf hinzuweisen, dass in diesem Trainingsstadium eine erhöhte Gefahr besteht, irrtümlich in eine falsche Straße einzubiegen bzw. sich auf dem Weg befindliche Hindernisse nicht oder zu spät zu bemerken. Hierbei handelt es sich um den sog. Bainbridge Effekt („Ironie der Automatisierung“), nachdem im Zustand der Unterforderung die Aufmerksamkeit nicht oder nur zu einem geringen Teil für die jeweilige Tätigkeit eingesetzt wird und sich daher auf andere Bereiche richtet. Wenn sie ganz von der Arbeit abgezogen wird erhöht sich das Risiko für gefährliche Situationen (vgl. Cube, 1995, S. 75). Schließlich ist es wahrscheinlich, dass sich, sofern man eine längerfristige Strecken- bzw. Zieländerung vornimmt, etwa die Strecke nur noch einmal in 2 Jahren geht, der Prozess der Qualifizierung in einen der Dequalifizierung umkehrt, was sich in einem nun nicht mehr automatisiert erfolgenden Zurechtfinden widerspiegelt. Die Entscheidungsleiter nach Rasmussen ist ein Modellschema, das zur Beschreibung des Verhaltens von Operateuren in komplexen Entscheidungssituationen der Prozesssteuerung entwickelt wurde. Die Leiter enthält Aktivitäten, die die Schritte der Informationsverarbeitung beschreiben, und Informations- oder Wissenszustände als Ergebnis der Verarbeitungsschritte. Aktivitäten und resultierende Zustände sind beide in einer aufwärts und abwärts gerichteten Folge angeordnet. Die aufwärts gerichtete Folge enthält Aktivitäten und Information, die für die Analyse einer aktuellen Situation erforderlich sind. Die abwärts gerichtete Folge enthält Aktivitäten und Information, die für die Auswahl, Planung und Ausführung einer geeigneten Handlung erforderlich sind. Eine Handlung setzt sich dabei aus einzelnen Aktionen zusammen. Die folgenden Phasen bzw. Stufen („Steps“) bei der Entscheidungsfindung sind aufgrund von Analysen von Entscheidungsprozessen in Leitwarten von Kraftwerken identifiziert worden: Aktivierung: Zu Beginn des Entscheidungsprozesses wird der Entscheidungsträger durch einen Alarm aktiviert. Beobachten: Im Anschluss daran beobachtet er das System, um Informationen über eine mögliche Störungsursache zu bekommen. Identifizieren: Danach werden die zur Verfügung stehenden Informationen analysiert, um die Störungsursache zu identifizieren. Interpretation: Durch die Interpretation der identifizierten Störungsursache wird die Wirkung auf das Gesamtsystem abgeschätzt. Evaluation: Geht aus der Interpretationsphase der gewünschte Zielzustand der Anlage nicht unmittelbar eindeutig hervor, so wird in einer Evaluationsphase der ultimative Zielzustand des Gesamtsystems bestimmt. Definiere Aufgabe: Im Anschluss daran werden Aufgaben definiert, um so die Ursachen für die Störung zu beheben. Formuliere Prozedur: Dann werden detaillierte Arbeitsschritte für die Behebung der Störung geplant. Ausführung: Anschließend werden die geplanten Arbeitsschritte ausgeführt und so die Störung behoben. Zur Modellverdeutlichung lässt sich das Beispiel einer Leitwarte eines Wasserkraftwerkes heranziehen. Die Entscheidungskette wird hier durch ein hochfrequent rot blinkendes Warnsignal bzw. einem Warnton eingeleitet (Aktivierung). Die entscheidungsbefugte Person erkennt sofort, dass der reibungslose Ablauf des Stromgenerierungsprozesses an irgendeiner Stelle behindert sein muss (Alarm). Für eine möglichst fehlerfreie Identifikation bzw. Lokalisation der Störung inkl. des Störungsausmaßes müssen alle relevanten Überwachungsmonitore kontrolliert werden und aus der Vielzahl der möglichen, häufig auftretenden Störungen (Kavitation, wartungstechnische Probleme, manuelle Fehlmanipulation, überhöhte Drehzahl der Laufradschaufeln, Probleme der Stellkörper in der Turbine) die aktuelle zu identifizieren (Identifizieren). Hier soll exemplarisch als Störung eine überhöhte Drehzahl angenommen werden. Als Folgen für das Gesamtsystem lassen sich Schwierigkeiten mit dem Generator, also eine erhöhte Stromproduktion und infolge der Systemüberlastung Kavitationsprobleme erwarten. Was ist das ultimative Ziel? Der Zielzustand der Anlage liegt in der Erreichung einer Drehzahl im idealen Bereich bzw. normaler Stromproduktion. Um diesen wieder herzustellen ist eine Änderung der folgenden Bedingungen erforderlich: Da eine überhöhte Drehzahl das Resultat eines zu hohen Wasserdrucks bzw. – stands im Speicherbecken ist sollte zunächst ein Druckabbau erreicht werden. Da der hohe Wasserstand auf ein unvorhergesehenes und außerhalb der menschlichen Manipulationsgewalt liegendes Ereignis (unvorhergesehenes Regenereignis) zurückzuführen ist, bieten sich nur die zwei folgenden Handlungsalternativen: (1) Die Leitschaufeln sind an den Wasserdruck durch entsprechende Schrägstellung anzupassen bzw. (2) bei zu hohem Druck Generator und Turbine langsam herunterfahren, Ventile schließen und Öffnung der Regen- bzw. Hochwasserentlastung (Aufgabe). Für die Umsetzung dieser Maßnahmen müssen nun verschiedene Hebel und Knöpfe von der Leitwarte aus in definierter Abfolge betätigt werden und die sofort oder verzögert eintretenden Veränderungen im System überwacht, kontrolliert und gegebenenfalls modifiziert werden. Informationen über die Störung und den damit zusammenhängenden Stromausfall (bis zu max. 2 Tagen) sind an die zuständigen Stellen weiterzugeben. Eventuell erforderliche Wartungsmaßnahmen sollten eingeleitet werden (Prozedur). Analog lässt sich ein Beispiel aus dem Bereich der Flugführung aufstellen: Im Flugzeug wird der Pilot vor einem Strömungsabriss gewarnt (Alarm), indem das Steuerhorn bzw. der Sidestick vibriert (Aktivierung). Bei direkt gesteuerten Flugzeugen rührt dies von Schwingungen der Steuerflächen her. In modernen Fly-by-wire geführten Flugzeugen wird dieser Effekt durch den sog. Shaker nachgebildet. Diese Vibration veranlasst den Piloten, seine Fluglage (inkl. Längs- und Vertikalgeschwindigkeiten) zu überprüfen. Die Beobachtung, dass sich das Flugzeug im Steigflug befindet und eine zu geringe Geschwindigkeit besitzt, kennzeichnet einen potenziell instabilen Flugzustand (Systemzustand), den es zu vermeiden gilt. Zur Überführung in den sicheren Zustand (Zielzustand) kann entweder der Vortrieb verbessert oder aber der Steigflug gänzlich abgebrochen werden (Aufgabendefinition), um so die Geschwindigkeit zu erhöhen. Um den Vortrieb zu erhöhen (Aufgabe), ist zunächst sicherzustellen (Prozedur), dass die Luftbremsen (speed brakes) eingefahren sind. Im Weiteren ist die Triebwerksleistung zu steigern. Durch leichte Verringerung des Steigwinkels kann der Vortrieb zusätzlich verbessert werden. Nach Einleiten dieser Maßnahmen ist die Soll-Geschwindigkeit einzuregeln und zu überwachen. Zwischen den Elementen der Entscheidungsleiter können auf den Ebenen des fertigkeitsund regelbasierten Verhaltens Abkürzungen auftreten, die das Verhalten erfahrener Operateure repräsentieren. Entsprechend dem 3-Ebenenmodell von Rasmussen verlagern sich Problemlösungsprozesse nach unten, sofern die Situation hinreichend einfach strukturiert ist oder der Operateur durch häufiges Training mit der Situation vertraut ist. Beim fertigkeitsbasierten Verhalten reagiert ein erfahrener Operateur reflexartig auf eindeutige Aktivierungsreize. Etwas komplexere Situationen, die aber regelbasiert gelöst werden, liefern eindeutige Reizmuster, die eine unmittelbare Identifikation des Systemzustands oder sogar eine eindeutige Zuordnung von Aufgaben erlauben. Sehr komplexe, unbekannte Situationen hingegen werden wissensbasiert abgearbeitet, wobei die Entscheidungsleiter vollständig durchlaufen wird. Auch zwischen anderen Elementen können direkte Verknüpfungen bestehen, die dann spezifisches Benutzerverhalten kennzeichnen. Geht der Benutzer beispielsweise nicht streng analytisch vor, können auf Grundlage von Annahmen aus einem identifizierten Systemzustand Aufgaben abgeleitet werden (heuristisches Verhalten). Die Abstraktionshierarchie besteht aus mehreren Schichten. Ein Abstraktionsniveau ist gekennzeichnet durch den Grad der Detaillierung in Bezug auf die Realisierung einer Funktion. Je höher das Abstraktionsniveau desto geringer die Auflösung in Bezug auf Einzelheiten. Ein System wird auf einem definierten Abstraktionsniveau in Form der Komponenten und ihrer Beziehung zueinander beschrieben, welche wiederum auf einem niedrigeren Abstraktionsniveau in ihre konstituierenden Komponenten aufgelöst werden können. Bei der Prozessführung besteht die Abstraktionshierarchie im Allgemeinen aus fünf Schichten, die folgende Merkmale besitzen: • Jede Schicht der Hierarchie beinhaltet das gleiche System, nur in einer anderen Beschreibungsweise. • Jede Schicht hat ihre eigenen Begriffe, Konzepte und Prinzipien. • Die Auswahl der Schichten zur Beschreibung eines bestimmten Systems hängt vom Beobachter, seinem Wissen und seinen Kenntnissen ab. Für viele Systeme gibt es jedoch einige Schichten, die als natürlich und in der Sache liegend angesehen werden können. • Voraussetzung für das einwandfreie Funktionieren jeder Schicht ist die Einhaltung der operationellen Rahmenbedingungen (constraints) auf der darunter liegenden Ebene. Das Verständnis für das System erhöht sich dadurch, dass man sich von einer Schicht zur anderen bewegt. Bewegt man sich in der Hierarchie aufwärts, erfährt man mehr über die Ziele des Systems, bewegt man sich abwärts, gewinnt man Kenntnisse darüber, wie das System funktioniert, um diese Ziele zu erreichen. Höhere Schichten enthalten weniger Einzelheiten als niedrigere Schichten. Weiterhin ist die Hierarchie dadurch gekennzeichnet, dass die verschiedenen Schichten durch eine Ziel-Mittel- Beziehung verbunden sind. Ziel-Mittel-Hierarchien sind dadurch charakterisiert, dass mit dem System Ziele verfolgt werden. Die Mittel werden zum Erreichen des Ziels zur Verfügung gestellt. Die unteren Schichten stellen jeweils die Mittel bereit, um die Ziele der darüber liegenden Schichten zu erreichen Die fünf Schichten Abstraktionsebene): der Prozessführung sind (Beginn mit der höchsten • Funktioneller Zweck: der Zweck, für den das System entworfen wurde. • Abstrakte Funktion: die vorgesehene Kausalstruktur des Prozesses in Bezug auf Masse, Energie, Information oder Wertefluss. • Generalisierte Funktion: die Grundfunktionen, zu deren Durchführung die Anlage entworfen wurde. • Physikalische Funktion: die Merkmale der Komponenten und deren Verbindungen untereinander. • Physikalische Form: die äußere Erscheinung und die Lage der Komponenten. Nutzt man die Analogie zwischen den Modellen der Konstruktionslehre und der Abstraktionshierarchie nach Rasmussen, so lässt sich letztere zur Wissensrepräsentation in der Produktentwicklung verwenden. Neben der hierarchischen Zergliederung des Gesamtsystems differenzieren Pahl/Beitz 2007 je nach Konstruktionsphase unterschiedlich konkrete Betrachtungsweisen. Beispielsweise sind auf der abstraktesten Stufe die Gesamtziele als Anforderungsliste oder Zielkatalog repräsentiert. Auf einer konkreteren Ebene wird das Lösungsprinzip über physikalische Effekte (z.B. Hebeleffekt), grundlegende geometrische und stoffliche Merkmale zur Festlegung des Wirkortes und prinzipielle Werkstoffeigenschaften (z. B. fest, flüssig, korrosionsbeständig, zäh) beschrieben. Auf der untersten Ebene entspricht der Bauzusammenhang der physischen Form. Außer der Geometrie und Anordnung der Bauteile finden sich dort auch Oberflächen- und Werkstoffeigenschaften, die die Körperlichkeit beschreiben. In den vorangehenden Folien wurde der Abstraktions-Dekompostions-Raum für die Verfahrensentwicklung unter Berücksichtigung unterschiedlicher Dekompositionsstufen entworfen. Werden nun dargestellten Zeichnungen als Repräsentation auf der Abstraktionsebene „Physikalische Funktion“ verstanden, lässt sich aus den entworfenen, komplementären Hierarchien der oben dargestellte Abstraktions-Dekompositions-Raum bilden, der die während einer verfahrenstechnischen Entwicklung anfallenden Informationen so strukturiert, dass sie für die Arbeitsperson möglichst mental kompatibel sind. Der Abstraktions-Dekompositions-Raum stellt folglich den Suchraum für die Bewältigung der während der Verfahrensentwicklung auftretenden Probleme dar. Über die Frage „Wie?“ wird dabei ”hinabgestiegen“ auf eine konkretere Ebene, während die Frage „Warum?“ zu einer abstrakteren Ebene leitet (”hinaufgestiegen“). Der Mensch ist ein informationsverarbeitendes System, das ansatzweise modelliert und parametrisiert werden kann. Ein solches quantitatives Modell ermöglicht Vorhersagen der Benutzer-Computer-Interaktion, nicht aber die Beschreibung der tatsächlichen Vorgänge in unserem Gehirn. Für die Gestaltung von Mensch-Rechner-Schnittstellen entwickelten CARD et al. (1983) ein Rechenmodell menschlicher Informationsverarbeitung (Model Human Processor, kurz MHP). Das MHP differenziert ähnlich dem Wickens-Modell der Informationsverarbeitung drei kognitive Subsysteme – perzeptiver, kognitiver und motorischer Prozessor – und unterscheidet das Arbeits- und Langzeitgedächtnis. Das Arbeitsgedächtnis hat eine reine Kapazität von 3±1 Chunks, z.B. wiederholbare Anzahl von Zeichen einer langen Zeichenreihe, die unerwartet stoppt. In der Regel wird die reine Kapazität des Arbeitsgedächtnis jedoch durch das Langzeitgedächtnis zur effektiven Kapazität (*) des Arbeitsgedächtnis auf 7±2 Chunks erweitert, z.B. längste Zahl, die wiederholt werden kann (Card 1983). Der Ursprung des MHP liegt in der Kognitionspsychologie. Zweck ist die Analyse und Vorhersage von Benutzeraufgaben in der Mensch-Rechner-Interaktion. Die kognitionspsychologische Analyse soll: • nützliche a-priori Abschätzungen liefern • für alle an der Entwicklung und Evaluation Beteiligten leicht verständlich sein • sowohl durch Forscher als auch durch Praktiker einsetzbar sein • (kognitions-) psychologisches Wissen integrieren • auf viele verschiedene Designvarianten anwendbar sein • Wahrnehmung und motorische Funktionen gleichberechtigt berücksichtigen • mit geringem Aufwand einen hohen Nutzen bieten Zur Operationalisierung des MHP wird das sog. GOMS-Modell verwendet, das Ziele (goals), Operatoren (operators), Handlungsmethoden (methods) und Selektionsregeln (selection rules) differenziert. Der menschliche Problemlösungsprozess wird in GOMS modelliert, indem die Aufgabe in eine Zielhierarchie zerlegt wird. Die jeweiligen Subziele können auf einem Stapel abgelegt und wieder entfernt werden. Die Subziele determinieren bestimmte Methoden zur Zielerreichung, deren Nutzung im Falle von Zielkonflikten auch durch Selektionsregeln gesteuert werden kann. Die Operatoren stellen in Anlehnung an das MHP elementare perzeptive, kognitive oder motorische Akte dar, denen mittlere Ausführungszeiten zugeordnet werden können. Es sind jedoch auch höhere Aggregationsebenen für Operatoren denkbar, z.B. die funktionale Ebene für die Modellierung computergestützter Textverarbeitung. Oft verwendete Operatoren können zu Methoden zusammengefasst werden. Somit wird deutlich, dass das GOMS-Modell eher einen aufgabenmodellierenden Charakter besitzt. Das GOMS-Modell ist das empirisch am meisten getestete Modell zur Prognose von Ausführungszeiten bei Aufgaben der Mensch-Rechner-Interaktion. Auf der Basis des oben skizzierten Grundmodells wurden eine Reihe von Derivaten entwickelt, z.B. das Keystroke Level Model von Card, Moran & Newell (1980). Eigenschaften von KLM: • Vorhersagen über die Abarbeitungsgeschwindigkeit und den Anteil an geistiger und motorischer Tätigkeit • keine Unterscheidung zwischen G, M und S • nur aus einer beschränkten Anzahl von Operatoren bestehend + einfache und schnelle Anwendung + nützliche und einfache Vergleichsmöglichkeit + gute Nachvollziehbarkeit - schlechte Automatisierbarkeit