Skriptum zum Vorkurs Mathematik - Ilias
Werbung

Vorlesung zur Präsenzphase des
Vorkurses Mathematik
für die Fachrichtung
Wirtschaftswissenschaften
Dr. Martin Folkers
Institut für Stochastik
Karlsruher Institut für Technologie (KIT)
Karlsruhe 2010
KIT
Universität
www.kit.edu
des
Landes
Baden-Württemberg
und
nationales
Forschungszentrum
in
der
Helmholtz-Gesellschaft
Vorwort
Dieses Skriptum behandelt den Stoff, der im Rahmen der Präsenzphase des Vorkurses Mathematik für die Fachrichtung Wirtschaftswissenschaften in der Vorlesung
präsentiert werden soll. Die Kenntnis der 5 Einheiten der Onlinephase
• Mengenlehre
• Zahlbereiche
• Abbildungen
• Die Sprechweise der Stochastik
• Kurvendiskussion
werden zumindestens in Teilen als bekannt vorausgesetzt. Die Inhalte dieser 5 Einheiten werden jeweils nachmittags in den Übungen nochmals wiederholt und eingeübt.
Die Inhalte der Vorlesungen sind in 3 Kapitel aufgeteilt.
• Kapitel 1: Zahlbereiche
In diesem Kapitel wird nochmals eingegangen auf den Aufbau der Zahlen
und insbesondere die ganzzahlige Arithmetik ein wenig weiter ausgebaut. Im
Mittelpunkt steht die Einführung des Begriffs eines Prüfziffernsystems. Dieser
Begriff ist von zentraler Bedeutung in der Barcodetechnologie, eine der Grundlagen der modernen Logistik. Als Beispiele werden behandelt das System der
Internationalen Buchnummern (ISBN) und das System der Global Trade Item
Numbers (GTIN, früher EAN für Europäische Artikelnummern), welche jeder aus dem Supermarkt kennt. Um einen Eindruck von moderner Logistik,
einem zentralen Thema des Wirtschaftsingenieurwesens, zu bekommen, sei jedem empfohlen, sich z.B. die Internetseiten der BLG (Bremer Lagerhausgesellschaft) anzusehen. Die BLG ist einer der weltgrößten Logistikunternehmen.
Die Darstellung des GTIN-Systems stammt in leicht überarbeiteter Version aus
einer sehr gelungenen Seminarausarbeitung der Studierenden des Wirtschaftsingenieurwesens: Tim Hilgert, Gerlinde Utsch und Kai Windscheid. Diese drei
Studierenden haben im SS 2010 in unserem Mathematischen Seminar für die
Fachrichtung Wirtschaftswissenschaften über das Thema Prüfzeichensysteme
einen insgesamt 3-stündigen Vortrag gehalten.
1
2
• Kapitel 2: Relationen
In diesem Kapitel wird der Begriff einer Relation, welcher schon aus der Einheit Mengenlehre bekannt ist, weiter ausgebaut. Im Zentrum steht der Begriff einer Äquivalenzrelation auf einer Menge. Wie wir sehen werden, führen
Äquivalenzrelationen zu einer Klasseneinteilung auf der Menge. Klasseneinteilungen sind jedem aus dem Alltag wohlbekannt. So werden z.B. Kinder in der
Schule in (Schul-) Klassen eingeteilt, Lebensmittel in Warengruppen (Klassen)
oder Handelsklassen, Produkte in Qualitätsklassen u.s.w.. Äquivalenzrelationen dienen daher dazu, den Vorgang der Klassifizierung von Objekten einer
Grundgesamtheit nach irgendwelchen Richtlinien mathematisch zu modellieren.
• Kapitel 3: Polynome
In diesem Kapitel werden Polynome (in einer Variablen) behandelt, wobei die
Polynomarithmetik im Vordergrund steht. Die aus der Schule bzw. aus der
letzten Einheit der Onlinephase bekannte Kurvendiskussion kommt nur am
Rande vor. Das Thema Kurvendiskussion wird in der Vorlesung Mathematik 1 noch ausführlich behandelt werden. Die Polynomarithmetik, also das
Rechnen mit Polynomen, spielt in vielen Teilen der Mathematik eine große
Rolle, z.B. in der Zahlentheorie, in der (linearen) Algebra, in der Geometrie,
in der Codierungstheorie, in der numerischen Mathematik. Ein Grundproblem
der Numerik, die Aufgabe der Polynominterpolation wird in diesem Kapitel
gelöst.
Die Präsenzphase des Vorkurses hat mehrere Ziele. Erstens soll sie vorbereiten auf
die Vorlesung Mathematik 1 und hier den fachlichen Einstieg erleichtern. Wichtig ist
mir, dass gleich am Anfang einige Themen aus der Praxis zumindestens angesprochen werden, welche dann erst in späteren Vorlesungen vertieft behandelt werden.
Es ist nicht das Ziel, Stoff aus der Vorlesung schon vorwegzunehmen. Viele Dinge sowohl aus der Online- wie auch der Präsenzphase kommen in der Vorlesung
nochmals zur Sprache. Zweitens soll die Präsenzphase als auch die in der folgenden
Woche stattfindende O-Phase der Fachschaft Wirtschaftswissenschaften dazu dienen, sich gegenseitig kennenzulernen. Sie werden ziemlich schnell feststellen, dass
das gemeinsame Lernen in stabilen Kleingruppen einen deutlich höheren Lernerfolg
mit sich bringt.
Karlsruhe, den 30.September 2010
Dr. Martin Folkers
Kapitel 1
Zahlbereiche
1.1
Die natürlichen Zahlen
Die natürlichen Zahlen sind die beim Zählen vewendeten Zahlen 1, 2, 3, 4, 5, 6, 7,
8, 9, . . . . Die Menge der natürlichen Zahlen wird mit dem Symbol N bezeichnet,
also
N = {1, 2, 3, 4, 5, 6, . . .}.
In moderner Sprechweise haben die natürlichen Zahlen ihren Ursprung in dem
Grundbedürfnis, endliche Mengen abzuzählen, also z. B. die Anzahl von Nutztieren
in einer Herde zu bestimmen. Ist A eine endliche Menge, so lässt sich die Mächtigkeit
|A| von A mit irgendeinem festgelegten Symbol notieren. Zwei gleichmächtige (endliche) Mengen bekommen das gleiche Symbol für ihre Mächtigkeit zugeordnet, zwei
(endliche) Mengen von verschiedener Mächtigkeit bekommen verschiedene Symbole
für ihre jeweiligen Mächtigkeit zugeordnet. Auf diese Weise wurden schon sehr früh
in der Geschichte der Menschen Zahlsymbole eingeführt. Unsere heute verwendeten
Zahlsymbole haben ihren Ursprung in den arabischen Ländern, man spricht daher
auch von den arabischen Ziffern bzw. Zahlen. Eine mathematische Kennzeichnung
der natürlichen Zahlen auf Grundlage der Mengenlehre gab erstmals der deutsche
Mathematiker Richard Dedekind (1831 - 1916) in Was sind und was sollen die Zahlen
(1888). Der italienische Mathematiker Giuseppe Peano (1858 - 1932) formalisierte
Dedekinds Axiome. Mit der Peano-Axiomatik der natürlichen Zahlen (das Prinzip
der vollständigen Induktion) beginnt die Vorlesung Mathematik 1.
Auf der Menge N der natürlichen Zahlen läßt sich in bekannter Weise (vergleiche die
Einheit Zahlbereiche) eine Addition definieren. Aufgefasst als Abbildung ordnet die
Addition jedem Paar (a, b) ∈ N2 = N×N natürlicher Zahlen eine neue Zahl a+b ∈ N,
genannt die Summe der beiden Zahlen a und b, zu
+ : N × N → N, (a, b) 7→ a + b.
3
1.1. Die natürlichen Zahlen
4
Die Zahlen a, b ∈ N nennt man auch die Summanden. Es gelten die folgenden
Rechengesetze.
• Das Assoziativgesetz der Addition
Für alle a, b, c ∈ N gilt
(a + b) + c = a + (b + c),
dies bedeutet, dass man die Addition mehrerer natürlicher Zahlen klammerfrei
notieren kann.
• Das Kommutativgesetz der Addition
Für alle a, b ∈ N gilt
a + b = b + a,
diese bedeutet, dass die Reihenfolge der Summanden in einer (endlichen) Summe gleichgültig ist.
Weiter läßt sich auf der Menge N der natürlichen Zahlen in bekannter Weise (vergleiche die Einheit Zahlbereiche) eine Multiplikation definieren. Wieder aufgefasst
als Abbildung ordnet die Multiplikation jedem Paar (a, b) ∈ N2 = N × N natürlicher
Zahlen eine neue Zahl a · b ∈ N, genannt das Produkt der beiden Zahlen a und b,
zu
· : N × N → N, (a, b) 7→ a · b.
Die Zahlen a, b ∈ N nennt man auch die Faktoren. Es gelten die folgenden Rechengesetze.
• Das Assoziativgesetz der Multiplikation
Für alle a, b, c ∈ N gilt
(a · b) · c = a · (b · c),
dies bedeutet, dass man die Multiplikation mehrerer natürlicher Zahlen klammerfrei notieren kann.
• Das Kommutativgesetz der Multiplikation
Für alle a, b ∈ N gilt
a · b = b · a,
diese bedeutet, dass die Reihenfolge der Faktoren in einem (endlichen) Produkt
gleichgültig ist.
1.1. Die natürlichen Zahlen
5
Die Verbindung der Addition und der Multiplikation wird durch die beiden Distributivgesetze hergestellt.
• Für alle a, b, c ∈ N gelten
a · (b + c) = a · b + a · c
und
(a + b) · c = a · c + b · c.
Der nächste Schritt beim Aufbau der Zahlbereiche ist die Einführung der Zahl 0
(Null). Es wird die Notation
N0 = N ∪ {0} = {0, 1, 2, 3, 4, 5, . . .}
verwendet. Historisch steht die Null bzw. das heute gebräuchliche Zeichen 0 für das
Leere oder das Nichts, in moderner Sprechweise also für die Mächtigkeit der leeren
Menge. Bis zu Beginn der Neuzeit galt die Null im allgemeinen nur als Lückenzeichen im Positionssystem, welches für sich nichts bedeutet. Die Auffassung der Null
als Zahl, mit der auch gerechnet werden kann, setzte sich erst langsam ab dem 16.
Jh. durch (z. B. bei dem belgischen Ingenieur Simon Stevin, 1548 - 1620). Es ist
zu bemerken, dass die indischen Mathematiker mindestens seit Brahmagupta (geb.
598) mit dem Rechnen mit Null vertraut sind, die Kenntnisse der indischen Mathematik sind aber im Abendland zu Beginn der Renaissance unbekannt.
Die Addition und die Multiplikation lassen sich durch die Festsetzungen
• a + 0 = 0 + a = a, a ∈ N0 ,
und
• a · 0 = 0 · a = 0, a ∈ N0 ,
auf die Menge N0 der erweiterten natürlichen Zahlen fortsetzen. Die oben angegebenen Rechengesetze (Assoziativgesetze, Kommutativgesetze, Distributivgesetze)
bleiben erhalten.
Bemerkung 1.1.1 (Lineare Anordnung der natürlichen Zahlen).
Die natürlichen Zahlen bzw. die erweiterten natürlichen Zahlen lassen sich in natürlicher Weise der Größe nach anordnen, wir schreiben
0 < 1 < 2 < 3 < 4 < 5 < 6 < . . ..
Sprechweise
0 kleiner 1 kleiner 2 kleiner 3 kleiner 4 kleiner 5 kleiner 6 kleiner . . .
1.2. Die ganzen Zahlen
6
Sind a, b ∈ N0 zwei Elemente der erweiterten natürlichen Zahlen, so meint die Notation a ≤ b, dass die Zahl a entweder gleich der Zahl b ist oder die Zahl a in der
obigen Anordnung kleiner als die Zahl b ist. Die Notation a > b meint, dass die Zahl
a größer als die Zahl b ist, in dem Fall gilt also b < a. Die Notation a ≥ b meint,
dass die Zahl a entweder gleich der Zahl b ist oder die Zahl a größer als die Zahl b
ist, in dem Fall gilt also b ≤ a.
1.2
Die ganzen Zahlen
Im Bereich der erweiterten natürlichen Zahlen N0 läßt sich für vorgegebene Zahlen
a, b ∈ N0 die lineare Gleichung
a+x=b
nur dann lösen, falls b ≥ a gilt. Die (sogar eindeutig bestimmte) Lösung lautet in
diesem Fall
x = b − a.
Um auch im Fall b < a eine Lösung zu erhalten, werden die negativen Zahlen eingeführt (vergleiche die Einheit Zahlbereiche). Es ergibt sich der Zahlbereich der
ganzen (ganzrationalen) Zahlen
Z = {. . . , −3, −2, −1, 0, 1, 2, 3, . . .}.
Die Anerkennung der negativen Zahlen setzt sich zu Beginn des 17. Jhs. im Abendland allmählich durch. Die heute übliche Einführung der negativen Zahlen, bezeichnet mit den Symbolen −a, a ∈ N als Lösungen der Gleichungen a + x = 0, a ∈ N,
und die Rechengesetze für negative Zahlen findet man z. B. zu Beginn des 19. Jhs.
bei Martin Ohm (1792 - 1872, Bruder des Physikers Georg Simon Ohm). In anderen Kulturen wurde schon sehr viel früher mit negativen Zahlen gerechnet, so z. B.
in einem über 2000 Jahre alten chinesischen Rechenbuch. Auch bei Brahmagupta
findet man die Rechenregeln für negative Zahlen. Sowohl die Addition als auch die
Multiplikation lassen sich auf den Bereich Z der ganzen Zahlen fortsetzen.
1. Für die Addition
+ : Z × Z → Z, (a, b) 7→ a + b,
gelten die folgenden Rechengesetze.
• Das Assoziativgesetz der Addition
a + (b + c) = (a + b) + c für alle a, b, c ∈ Z.
• Das Kommutativgesetz der Addition
a + b = b + a für alle a, b, c ∈ Z.
1.2. Die ganzen Zahlen
7
• Die Existenz eines neutralen Elements (bzgl. der Addition): 0 =
Null,
0 + a = a + 0 = a für alle a ∈ Z.
• Es gibt eine Inversenbildung (bzgl. der Addition), diese wird Subtraktion genannt, d.h. zu jedem a ∈ Z gibt es ein Element, welches mit (−a)
bezeichnet wird, mit
a − a = a + (−a) = (−a) + a = 0.
2. Für die Multiplikation
· : Z × Z → Z, (a, b) 7→ a · b,
gelten die folgenden Rechengesetze.
• Das Assoziativgesetz der Multiplikation
a · (b · c) = (a · b) · c für alle a, b, c ∈ Z.
• Das Kommutativgesetz der Multiplikation
a · b = b · a für alle a, b, c ∈ Z.
• Die Existenz eines neutralen Elements (bzgl. der Multiplikation): 1
= Eins,
1 · a = a · 1 = a für alle a ∈ Z.
3. Die Verbindung zwischen der Addition und der Multiplikation wird hergestellt
durch die beiden Distributivgesetze
• erstes Distributivgesetz
a · (b + c) = a · b + a · c für alle a, b, c ∈ Z
und
• zweites Distributivgesetz
(a + b) · c = a · c + b · c für alle a, b, c ∈ Z.
Sprechweise:
Ist M 6= ∅ eine nichtleere Menge, und sind auf der Menge M eine Addition
und eine Multiplikation
+ : M × M → M, (a, b) 7→ a + b,
· : M × M → M, (a, b) 7→ a · b,
definiert, welche die obigen Rechengesetze erfüllen, so nennt man das Tripel (M, +, ·)
einen kommutativen Ring mit Eins. In diesem Sinn bildet das Tripel (Z, +, ·) einen
kommutativen Ring mit Eins.
1.2. Die ganzen Zahlen
8
Bemerkung 1.2.1 (Rechenregeln).
Mit Hilfe der obigen Rechengesetze in Z ergeben sich die folgenden Rechenregeln
• −(−a) = a,
a ∈ Z,
• (−a) · b = −a · b,
a, b ∈ Z,
• a · (−b) = −a · b,
a, b ∈ Z,
• (−a) · (−b) = a · b,
a, b ∈ Z.
Beachte
Diese Rechenregeln lassen sich leicht aus den Rechengesetzen für einem kommutativen Ring (mit Eins) ableiten.
Die Einführung der negativen Zahlen und ihre Rechengesetze wurde bis in die Mitte des 19. Jhs. viel diskutiert (z. B. von Emanuel Kant, Bernhard Bolzano). Insbesondere die vierte Rechenregel, nach der das Produkt zweier negativer Zahlen
eine positve Zahl ist, stellte viele Mathematiker und Philosophen vor Probleme.
So nimmt William Rowan Hamilton (1805 - 1865) im Jahr 1833 Anstoß daran, dass
das Produkt zweier Zahlen, die weniger als nichts bedeuten, eine Größe sein soll, die
mehr als nichts ist. Erst durch die oben skizzierte axiomatische Betrachtungsweise,
in der die negativen Zahlen als neue Symbole für die Lösungen der Gleichungen
a + x = 0, a ∈ N, eingeführt werden (z. B. bei Hermann Hankel, 1839 - 1873) wurde
das für uns heute selbstverständliche Rechnen mit den ganzen Zahlen auf eine sichere mathematische Grundlage gestellt. Man beachte, dass bei dieser Definition der
ganzen Zahlen die neuen abstrakten Symbole −a für die negativen Zahlen zunächst
keinerlei Bezug zu realen, z. B. physikalischen oder wirtschaftlichen Größen haben.
Interpretiert man z. B. die postiven ganzen Zahlen als Guthaben und die negativen
ganzen Zahlen als Schulden, so ist die Aussage Schulden multipliziert mit Schulden
ergibt ein Guthaben nur schwer zu interpretieren. Die Interpretation der negativen
Zahlen als Schulden findet man z. B. bei Leonardo von Pisa (genannt Fibonacci,
geb. ca. 1170 , gest. nach 1240).
Bemerkung 1.2.2 (Bemerkung Integritätsbereich oder integerer Ring).
(Z, +, ·) ist ein kommutativer, nullteilerfreier Ring, oder man sagt auch: (Z, +, ·)
ist ein Integritätsbereich oder integerer Ring, d.h. es gilt
aus a · b ∈ Z, a · b = 0 folgt a = 0 oder b = 0.
Beachte
Die Eigenschaft der Nullteilerfreiheit folgt aus der Definition der Multiplikation der
ganzen Zahlen (vergl. die Einheit Zahlbereiche).
1.2. Die ganzen Zahlen
9
Bemerkung 1.2.3 (Lineare Anordnung).
Die ganzen Zahlen sind auf dem Zahlenstrahl in natürlicher Weise linear angeordnet.
Sind a, b ∈ Z zwei ganze Zahlen, so heißt a kleiner als b, in Zeichen: a < b, falls die
Zahl a auf dem Zahlenstrahl links von der Zahl b steht. Wir schreiben wieder a ≤ b,
in Worten: a kleiner oder gleich b, falls a = b oder a < b gilt. Die hierdurch auf der
Menge Z definierte (lineare) Ordnung hat die folgenden Eigenschaften.
• Die Eigenschaft der Reflexivität: für alle a ∈ Z gilt
a ≤ a.
• Die Eigenschaft der Antisymmetrie: für alle a, b ∈ Z gilt
aus a ≤ b und b ≤ a folgt a = b.
• Die Eigenschaft der Transitivität: für alle a, b, c ∈ Z gilt
aus a ≤ b und b ≤ c folgt a ≤ c.
• Die Eigenschaft der Totalordnung: für alle a, b ∈ Z gilt
a ≤ b oder b ≤ a.
Dies bedeutet, dass man von zwei verschiedenen ganzen Zahlen a, b ∈ Z stets
sagen kann, welche die größere und welche die kleinere Zahl ist.
Beachte:
Für Ungleichungen gelten eine Reihe von Rechenregeln. Hierzu wird auf die Einheit
Zahlbereiche verwiesen.
Eine oft verwendete Eigenschaft der natürlichen Zahlen ist das folgende Prinzip des
kleinsten Täters.
Satz 1.2.4 (Das Prinzip des kleinsten Täters).
Ist T ⊂ N (bzw. N0 ) eine Teilmenge der (erweiterten) natürlichen Zahlen, so besitzt
die Menge T ein kleinstes Element, d.h. es gibt ein Element m ∈ T mit
m ≤ t für alle t ∈ T .
Beachte
Das Prinzip des kleinsten Täters lässt sich ausdehnen auf alle nach unten beschränkten Teilmengen T ⊂ Z. Dabei heißt eine Teilmenge T ⊂ Z nach unten beschränkt,
falls es eine ganze Zahl a ∈ Z gibt, so dass für alle t ∈ T gilt: a ≤ t.
1.3. Teilbarkeit
1.3
10
Teilbarkeit
Definition 1.3.1 (Teilbarkeit, Primzahlen).
1. Es seien a, b ∈ Z zwei ganze Zahlen. Die Zahl a heißt ein Teiler der Zahl b,
oder die Zahl b heißt teilbar durch die Zahl a, in Zeichen: a | b, falls es eine
ganze Zahl x ∈ Z gibt mit
b = x · a.
2. Eine ganze Zahl p ∈ Z, p > 1, heißt eine Primzahl, falls p nur die Teiler ±1
und ±p besitzt.
Beispiele 1.3.2.
• Die Menge aller positiven Teiler der Zahl n1 = 28 lautet
{1, 2, 4, 7, 14, 28}.
• Die Menge aller Teiler der Zahl n2 = −20 lautet
{−1, +1, −2, +2, −4, +4, −5, +5, −10, +10, −20, +20}.
• Die Zahlen
2, 3, 5, 7, 11, 13, 17, . . . , 257, . . . , 65537, . . .
sind Primzahlen.
Bemerkungen 1.3.3 (Eigenschaften der Teilbarkeitsbeziehung).
1. 1 teilt jede Zahl a ∈ Z, also für alle a ∈ Z gilt: 1 | a.
2. Jede ganze Zahl teilt 0, also für alle a ∈ Z gilt: a | 0.
3. Jede ganze Zahl teilt sich selber, also für alle a ∈ Z gilt: a | a.
4. 0 | 0 und 0 ∤ y für alle y ∈ Z mit y 6= 0.
5. Für alle a, b, c ∈ N (oder auch a, b, c ∈ Z) gilt:
aus a | b und b | c folgt a | c.
6. Für alle r, a, b ∈ Z gilt:
aus r | a und r | b folgt r | (a + b).
7. Für alle r, a, c ∈ Z gilt:
aus r | a folgt r | (a · c).
1.3. Teilbarkeit
11
Bemerkung 1.3.4 (Teilbarkeit als Ordnungsrelation).
Durch
a, b ∈ N, a | b ⇐⇒ a teilt b
wird auf der Menge N eine Ordnungsrelation definiert, d.h. es gilt
• die Eigenschaft der Reflexivität:
a teilt a für alle a ∈ N,
• die Eigenschaft der Antisymmetrie:
für alle a, b ∈ N gilt:
aus a | b und b | a folgt a = b,
• die Eigenschaft der Transitivität:
für alle a, b, c ∈ N gilt:
aus a | b und b | c folgt a | c.
Beachte:
1. ”| ” liefert keine Totalordnung auf N, d.h. nicht alle ganzen Zahlen sind bzgl.
der Teilbarkeitsrelation miteinander vergleichbar. So gilt z. B.
5 ∤ 6 und 6 ∤ 5.
2. ”| ” liefert keine Ordnungsrelation auf Z, denn die Forderung der Antisymmetrie ist nicht erfüllt. So gilt z. B.
(−1) | (+1) und (+1) | (−1), aber −1 6= +1.
Theorem 1.3.5.
Jede natürliche Zahl n ∈ N, n > 1, besitzt eine Darstellung als Produkt von Primzahlen, diese Darstellung ist bis auf die Reihenfolge der Faktoren eindeutig bestimmt.
Beispiele 1.3.6.
• 28 = 2 · 2 · 7 = 22 · 7,
• 20 = 2 · 2 · 5 = 22 · 5,
• 65537 = 65537,
• 7988945525550 = 2 · 32 · 52 · 11 · 97 · 101 · 257 · 641.
1.3. Teilbarkeit
12
Der folgende Satz ist schon in der Antike bekannt. Erfindet sich z. B. in den Elementen von Euklid.
Theorem 1.3.7 (Euklid).
Es gibt unendlich viele Primzahlen.
Die Primzahlen bilden innerhalb der ganzen Zahlen die atomaren Bausteine, aus denen sich alle von 0 verschiedenen ganzen Zahlen (bis auf das Vorzeichen und bis auf
die Reihenfolge der Faktoren) multiplikativ eindeutig zusammensetzen lassen. Es ist
bis heute kein effizientes Verfahren (öffentlich) bekannt, eine 160-stellige Dezimalzahl (oder grösser) in ihre Primfaktoren zu zerlegen (von Sonderfällen abgesehen). Es
gibt dagegen effiziente Algorithmen, welche entscheiden, ob eine vorgelegte Zahl eine
Primzahl ist. Diese Algorithmen ermöglichen es, sehr große Primzahlen aufzufinden.
Genau auf dieser Tatsache basieren eine Reihe von mathematischen Verfahren der
Kryptologie, der Wissenschaft der Verschlüsselung von Nachrichten. Ein (probabilistischer) Primzahltest ist z. B. im Computeralgebrasystem Maple realisiert.
Im Bereich Z der ganzen Zahlen läßt sich eine uneingeschränkte Division (als Umkehrung der Multiplikation) noch nicht einführen. Es gilt aber der folgende Satz von
der Division mit Rest, welcher die Grundlage vieler Algorithmen und weiterführender Aussagen innerhalb der ganzen Zahlen bildet.
Theorem 1.3.8 (Satz von der Division mit Rest).
Es seien a, b ∈ Z, b 6= 0. Dann gibt es eindeutig bestimmte Zahlen q, r ∈ Z mit
a = q · b + r,
0 ≤ r < |b|.
Sprechweise
Die Menge {0, 1, 2, . . . , |b| − 1} stellt ein vollständiges Restsystem für die Division durch b ∈ Z, b 6= 0, dar.
Beispiele 1.3.9.
• a = 7, b = 3, 7 = 2 · 3 + 1, also q = 2 und r = 1;
• a = 33, b = 11, 33 = 3 · 11 + 0, also q = 3 und r = 0;
• a = 33, b = 40, 33 = 0 · 40 + 33, also q = 0 und r = 33.
Definition 1.3.10 (größter gemeinsamer Teiler (ggT)).
Es seien a, b ∈ Z. Eine Zahl d ∈ Z heißt größter gemeinsamer Teiler von a und
b, falls gilt:
1. d | a und d | b,
2. aus t | a und t | b, t ∈ Z, folgt: t | d.
1.3. Teilbarkeit
13
Beachte:
• Der ggT zweier ganzer Zahlen a, b ∈ Z, a, b 6= 0, ist bis auf das Vorzeichen
eindeutig bestimmt, in der Regel entscheidet man sich für das positive Vorzeichen und schreibt d = ggT(a, b), d ∈ N (engl.: d = gcd(a, b), greatest common
divisor).
• Es gilt ggT(0, 0) = 0 und ggT(a, 0) = a für alle a 6= 0.
• Es gilt ggT(a, b) = 0 genau dann, wenn a = b = 0 gilt.
Theorem 1.3.11 (Existenz des ggT).
In (Z, +, ·) besitzen zwei Elemente a, b ∈ Z einen größten gemeinsamen Teiler.
Beweis: Euklidischer Algorithmus!!! (vergl. die Vorlesung Mathematik 1)
Definition 1.3.12 (Teilerfremdheit).
Zwei Zahlen a, b ∈ Z heißen teilerfremd, falls 1 ein größter gemeinsamer Teiler
von a und b ist, also falls gilt
ggT(a, b) = 1
(bei Normierung auf das positive Vorzeichen).
Beispiele 1.3.13.
• Gesucht ist der grösste gemeinsame Teiler der beiden Zahlen a = 51 und
b = 36. Die Menge der positiven Teiler von a lautet: T (51) = {1, 3, 17, 51}, die
Menge der positiven Teiler von b lautet: T (36) = {1, 2, 3, 4, 6, 9, 12, 18, 36}, die
gemeinsamen (positiven) Teiler sind also 1 und 3, es gilt damit
d = ggT(51, 36) = 3.
• Die Zahlen a = 51 und c = 28 sind teilerfremd, es gilt
ggT(51, 28) = 1.
Der grösste gemeinsame Teiler zweier Zahlen a, b ∈ Z läßt sich besonders gut ausrechnen, falls man die Primfaktorzerlegungen dieser beiden Zahlen kennt. In diesem Fall läßt sich nämlich die Menge der gemeinsamen Teiler von a und b bequem
hinschreiben. Interessanterweise kann man aber den ggT(a, b) auch sehr ”effizient”
ausrechnen, wenn man die Primfaktorzerlegungen nicht kennt. Der Euklidische Algorithmus, welchen schon Euklid vor 2000 Jahren kannte, liefert einen Existenzbeweis
für den ggT zweier ganzer Zahlen und gleichzeitig ein effizientes Verfahren, den
größten gemeinsamen Teiler zweier ganzer Zahlen zu berechnen. Dieser Algorithmus
wird in der Vorlesung Mathematik 1 vorgestellt werden. Er ist in jedem Computeralgebrasystem (CAS) (z. B. Maple, Mathematica, Mupad) realisiert.
1.4. Kongruenzrelationen
1.4
14
Kongruenzrelationen
Eine der wichtigsten Aussagen in der Zahlentheorie ist der Satz von der Division
mit Rest. Sind a ∈ Z und m ∈ N, so besagt dieser Satz, dass es eindeutig bestimmte
Zahlen q, r ∈ Z gibt mit
a = q · m + r und 0 ≤ r < m.
Zwei ganze Zahlen a, b ∈ Z liefern bei der Division durch m ∈ N genau dann
denselben Rest r ∈ Z, 0 ≤ r < m, falls die Differenz a − b durch m teilbar ist. Dies
führt auf die folgende Definition.
Definition 1.4.1 (Kongruenzrelationen in Z ).
Es sei m ∈ N eine natürliche Zahl. Wir führen in Z die folgende Kongruenzrelation modulo m ein: Zwei Zahlen x, y ∈ Z heißen kongruent modulo m, in
Zeichen: x ≡ y (mod m), wenn die Differenz x − y ein ganzzahliges Vielfaches von
m ist, also
x ≡ y (mod m) ⇐⇒ m | (x − y) ⇐⇒ es gibt ein k ∈ Z mit x − y = k · m.
Beispiele 1.4.2.
Es sei m = 12, dann gilt z. B.
15 ≡ 3 (mod 12), 15 ≡ 27 (mod 12), 12 ≡ 0 (mod 12), 11 ≡ −1 (mod 12).
Beachte:
Zwei ganze Zahlen x, y ∈ Z sind genau dann mod m kongruent, wenn sie bei der
Division durch m denselben Rest r ∈ {0, 1, . . . , m − 1} lassen. Die Menge
{0, 1, . . . , m − 1}
stellt ein vollständiges Restsystem mod m, das kleinste nichtnegative Restsystem mod m dar. Ein anderes vollständiges Restsystem mod m, das betragskleinste Restsystem mod m, ist gegeben durch
n
m
mo
.
r∈Z:− <r≤+
2
2
Beispiele 1.4.3.
• Es sei m = 12, das kleinste nichtnegative Restsystem mod 12 lautet
{0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11},
das betragskleinste Restsystem mod 12 lautet
{−5, −4, −3, −2, −1, 0, 1, 2, 3, 4, 5, 6}.
1.4. Kongruenzrelationen
15
• Es sei m = 11, das kleinste nichtnegative Restsystem mod 11 lautet
{0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10},
das betragskleinste Restsystem mod 12 lautet
{−5, −4, −3, −2, −1, 0, 1, 2, 3, 4, 5}.
Der Begriff der Kongruenzen und auch die heute übliche Notation x ≡ y (mod m)
führte Carl Friedrich Gauß (1777 - 1855) in seinem grundlegenden Werk Disquisitiones arihmeticae, Göttingen 1801, ein. Dieses Werk steht am Beginn der modernen
Zahlentheorie als eigenständige Disziplin innerhalb der Mathematik. Einen wichtigen Vorläufer der Kongruenzrechnung stellen die zahlentheoretischen Arbeiten des
Königsberger Mathematikers und Diplomaten Christian Goldbach (1690 - 1764) dar,
der u.a. mit Hilfe der Kongruenzrechnung den Satz bewies, dass eine natürliche Zahl
der Form 3 · p + 2, p ∈ N, niemals eine Quadratzahl sein kann.
Bemerkungen 1.4.4.
1. Durch x ≡ y (mod m) ist eine Äquivalenzrelation auf Z definiert, d.h. die
Kongruenzrelation mod m hat die folgenden Eigenschaften.
• Die Eigenschaft der Reflexivität: für alle x ∈ Z gilt
x ≡ x (mod m).
• Die Eigenschaft der Symmetrie: für alle x, y ∈ Z gilt
aus x ≡ y (mod m) folgt y ≡ x (mod m).
• Die Eigenschaft der Transitivität: für alle x, y, z ∈ Z gilt
aus x ≡ y (mod m) und y ≡ z (mod m) folgt x ≡ z (mod m).
2. Im Fall m = 1 sind je zwei ganze Zahlen mod m äquivalent (kongruent). Damit können wir uns im Folgenden auf den Fall m ∈ N, m ≥ 2, beschränken.
3. Die Kongruenzrelation mod m erfüllt für x1 , x2 , y1, y2 ∈ Z die folgenden Rechenregeln:
(a) aus x1 ≡ y1 (mod m), x2 ≡ y2 (mod m) folgt
x1 ± x2 ≡ y1 ± y2 (mod m),
(b) aus x1 ≡ y1 (mod m), x2 ≡ y2 (mod m) folgt
x1 · x2 ≡ y1 · y2 (mod m).
Dies bedeutet, dass man Kongruenzen (modm) addieren, subtrahieren und
multiplizieren darf.
1.5. Prüfziffernsysteme
1.5
16
Prüfziffernsysteme
Eine erste Anwendung der bis jetzt entwickelten Kongruenzrechnung im Ring der
ganzen Zahlen sind die in der Praxis vielfach auftretenden Prüfzeichen- oder Prüfziffernsysteme. Unser Alltag wird bestimmt und gesteuert durch die verschiedensten
Nummern, z. B. Girokontonummern, Versicherungsscheinnummern, Steuernummern,
Geldscheinnummern etc.. Bei jedem Einkauf im Supermarkt erfolgt die Registrierung der gekauften Waren an der Kasse über einen Strichcode (Barcode), die maschinenlesbare Codierung der Artikelnummer (EAN), welcher auf jedem Produkt
aufgedruckt ist. Die moderne Barcodetechnologie ist heute ein unverzichtbares Instrument für die Steuerung von Unternehmen der Industrie und des Handels. In der
folgenden Tabelle sind einige gängige Nummernsysteme, welche jeder aus dem Alltag kennt, aufgeführt. Die beiden ersten Nummernsysteme (ISBN und EAN) werden
im Folgenden genauer behandelt.
Abkürzung
ISBN
EAN1
PZN
IBAN
BZÜ
Payback
1
Land
Int.
Int.
DE
Int.
DE
DE
Nummernsystem
International-Standard-Book-Number
European-Article-Number
Pharmazentralnummer
International-Bank-Account-Number
Beleglose Zahlscheinüberweisung
Payback Rabattsystem
2009 Umbenannt in GTIN - Global Trade Item Number.
Die mathematische Grundlage aller dieser Nummernsysteme ist der Begriff der
Prüfzeichensysteme bzw. Prüfziffernsysteme oder allgemeiner die Codierungstheorie.
Wir werden uns im Folgenden in der Darstellung auf den einfachsten Fall, nämlich
auf den Fall der linearen Prüfzeichensysteme modulo m beschränken.
Definition 1.5.1 (Prüfziffernsystem).
Ein lineares Prüfzeichensystem oder Prüfziffernsystem modulo m besteht aus
• Einer Zahl m ∈ N, m ≥ 2, zusammen mit dem Restsystem
A = {0, 1, 2, . . . , m − 1},
die Menge A heißt der zur Verfügung stehende Zeichenvorrat oder oft auch
das Alphabet,
• einer Zahl n ∈ N, n ≥ 2,
• einer Zahl c ∈ A,
• n Zahlen ω1 , ω2 , . . . , ωn−1 , ωn ∈ N, welche teilerfremd zu m sind. Die Zahlen
ω1 , ω2 , . . . , ωn−1 , ωn nennt man auch die Gewichte des Prüfziffernsystems
1.5. Prüfziffernsysteme
17
Aufbau eines Prüfzeichensystems:
Jedes ”Wort” der Länge (n − 1) über dem Alphabet A
a1 a2 . . . an−1 ,
ai ∈ A,
wird so um ein Prüfzeichen an ∈ A zu einem ”Codewort”
a1 a2 . . . an−1 an
der Länge n erweitert, dass dieses ”Codewort” die Kontrollgleichung
erfüllt.
ω1 · a1 + ω2 · a2 + . . . + ωn−1 · an−1 + ωn · an ≡ c (mod m)
Beispiel 1.5.2 (das ISBN - System).
Es seien speziell
m = 11, n = 10, c = 0 und ωi = i für alle i = 1, . . . , 10.
Man beachte, dass
ggT(ωi, m) = ggT(i, 11) = 1 für alle i = 1, . . . , 10
gilt und daher durch diese Festlegungen ein Prüfziffernsystem festgelegt ist. Die zugehörige Kontrollgleichung lautet
a1 + 2 · a2 + 3 · a3 + . . . + 9 · a9 + 10 · a10 ≡ 0 (mod 11)
oder nach der Prüfziffer a10 aufgelöst (beachte: 10 ≡ −1 (mod 11))
a10 ≡ a1 + 2 · a2 + 3 · a3 + . . . + 9 · a9 (mod 11).
Das obige Prüfzeichensystem ist das (in dieser Form bis 2006 gültige) ISBN - System (ISBN-10), welches heute weltweit im Buchhandel eingesetzt wird. Jedem
Buch wird heute eine ISBN (Internationale Standard-BuchNummer), bestehend aus
10 Ziffern zugeordnet. Die ISBN dient seit ca. 1970 vor allem dem Buchhandel dazu,
Bücher (auch Broschüren, elektronische Veröffentlichungen, Software, Karten etc.)
eindeutig zu identifizieren und Bestellvorgänge zu vereinfachen. Ausgenommen sind
hingegen periodisch erscheinende Werke (z.B. Zeitungen, Journale etc.), Tonaufnahmen und Musiknoten, für die es eigene Nummernsysteme gibt (ISSN - International
Standard Serial Number und ISMN - International Standard Music Number). Das
ISBN - System wurde mit der Einführung des neuen Nummernsystems ISBN-13
im Jahr 2006 einer Revision unterworfen, Eine der Hauptgründe für diese Revision war der Wunsch, das ISBN - System kompatibel zum international verwendeten
EAN - System des Handels zu machen. Hiervon wird im Abschnitt über das EAN System genauer berichtet werden. Eine ISBN-13-Nummer entsteht aus einer ISBN10-Nummer, indem erstens die ISBN-Prüfziffer gestrichen wird. Danach wird der
verbleibenden 9-stelligen ISBN-Nummer das Präfix 978 oder 979 vorangestellt. An
die jetzt entstandene 12-stellige Nummer wird als 13. Stelle die EAN-Prüfziffer angehängt. Durch dieses Vorgehen wurde sichergestellt, dass auch weiterhin alle schon
vergebenen ISBN-10-Nummern gültig sind.
1.5. Prüfziffernsysteme
18
Die ISBN (genauer ISBN-10) besteht grundsätzlich ausnahmslos aus 10 Ziffern, die
durch drei Bindestriche (oder auch Leerzeichen) in vier Gruppen eingeteilt wird. Die
ersten neun Zeichen werden der Menge {1, 2, . . . , 9} entnommen. Das 10. Zeichen,
die Prüfziffer, kann Werte zwischen 0 und 10 annehmen. Um mit einer Stelle auszukommen, schreibt man statt 10 ein X, also eine römische 10. Die Bindestriche
dienen einzig und allein der optischen Gliederung, die Nummer ist auch ohne sie
eindeutig. Dies bedeutet, dass es keine gleichen Ziffernfolgen mit unterschiedlicher
Bindestrichverteilung gibt. Die vier Gruppen sind im Folgenden beschrieben.
• Länder-/Sprachcode
Die erste Gruppe ist der Code für die verschiedenen Länder bzw. Sprachgruppen; 3 steht z.B. für den deutschen Sprachraum (Deutschland, Österreich,
Schweiz und Liechtenstein), 87 steht für Dänemark, 972 und 989 für Portugal.
• Verlagsnummer
Die zweite Gruppe ist die Verlagsnummer. Beteiligt sich ein Verlag am ISBN
- System, so geht er eine Reihe von Verpflichtungen ein, welche unten näher
beschrieben werden.
• Titelnummer
Die dritte Gruppe ist die Titelnummer innerhalb eines Verlages. Titelnummern
haben - je nach Länder-/Sprachcode und Verlagsnummer - eine Länge von 1
bis 6. Sinnvollerweise erhalten große Verlage mit umfangreicher Produktion
möglichst kurze Verlagsnummern, so dass ein ausreichendes Nummernkontingent zur Verfügung steht, während kleinere Verlage oder gar Selbstverleger
sich mit 1- bis 2-stelligen Titelnummern bescheiden müssen.
• Prüfziffer (genauer die Prüfziffer nach ISBN-10)
Die vierte Gruppe (einstellig!) stellt die Prüfziffer dar, welche mit dem obigen
Verfahren bestimmt wird.
Im folgenden sind die ISBN zweier Bücher zusammen mit der Prüfziffernberechnung
angegeben.
Nummer
Nummer
des Landes
des Verlages
1.te Ziffer
Ziffern 2, 3, 4
3
−
Deutschland
446
Carl Hanser Verlag
−
Nummer des Buches
Kontrollziffer
Ziffern 5, 6, 7, 8, 9
10.te Ziffer
15771
Neumann/Morlock
−
9
Operations Research
Die Prüfziffer lautet
a10 :≡ 3 + 2 · 4 + 3 · 4 + 4 · 6 + 5 · 1 + 6 · 5 + 7 · 7 + 8 · 7 + 9 · 1 ≡ 9 (mod 11).
1.5. Prüfziffernsysteme
19
Sollte sich bei der Prüfziffernberechnung a10 ≡ 10 (mod 11) ergeben, so lautet die
Kontrollziffer X, daher lautet wegen
1 · 3 + 2 · 5 + 3 · 2 + 4 · 8 + 5 · 0 + 6 · 6 + 7 · 5 + 8 · 8 + 9 · 0 = 186 ≡ 10 (mod 11)
die ISBN-Nummer des Buches: Otto Forster, Algorithmische Zahlentheorie
Nummer
Nummer
des Landes
des Verlages
1.te Ziffer
Ziffern 2, 3, 4
3
Deutschland
−
528
Vieweg Verlag
−
Nummer des Buches
Kontrollziffer
Ziffern 5, 6, 7, 8, 9
10.te Ziffer
06580
Otto Forster
−
X
Algorithmische Zahlentheorie
• Für die Verwaltung, die internationale Verbreitung und die Koordination der
Standard-Buchnummern ist die Internationale ISBN - Agentur zuständig,
welche ihren Sitz in London hat. Sie vergibt insbesondere die Länder-/Sprachcodes.
• Die Vergabe der Verlagsnummern liegt bei den nationalen ISBN - Agenturen. Für die Bundesrepublik Deutschland ist das die Internationale StandardBuchnummer Agentur, die der Marketing- und Verlagsservice des Buchhandels
GmbH mit Sitz in Frankfurt am Main (MVB) angegliedert ist. In der deutschsprachigen Schweiz ist dafür der Schweizerische Buchhändler- und Verlegerverband in Zürich und in Österreich der Hauptverband des Österreichischen
Buchhandels in Wien zuständig. Bezieht ein Verlag ISBNs, so geht er (u.a.)
die folgenden Verpflichtungen ein.
– Fehlerfreier Eindruck der ISBN in das Buch (nach Möglichkeit auf die
Rückseite und zwingend ins Impressum).
– Einmalige, eindeutige Vergabe der ISBNs, Neuauflagen benötigen eine
neue Nummer.
– Bei einer Buchausgabe mit einer anderen Bindeart (z.B. Hardcover/Paperback, Taschenbuch) verlangt das ISBN - System zwingend eine neue Codenummer.
– Bereits verlegte Bücher können auch nachträglich noch eine ISBN erhalten, um in Verlagsverzeichnisse aufgenommen werden zu können.
– Meldung der erschienenen Bücher an das ”Verzeichnis lieferbarer Bücher”
(VLB).
– Kostenloses Senden zweier Belegexemplare an die ”Deutsche Bücherei”
sowie eines Belegexemplars an die jeweilige Landesbibliothek.
Alle ISBN - Richtlinien lassen sich im öffentlichen ISBN - Handbuch nachlesen.
1.5. Prüfziffernsysteme
20
• Die MVB ist ein Tochterunternehmen des Börsenvereins des Deutschen Buchhandels. Sie wurde 1947 unter dem Namen Buchhändler-Vereinigung als
Dienstleistungsunternehmen des Gesamtbuchhandels und als Verlag des Börsenvereins des Deutschen Buchhandels gegründet. Die Gesellschafter sind
die buchhändlerischen Landesverbände. Das Unternehmen beschäftigt sich mit
Serviceleistungen schwerpunktmäßig für Buchhandlungen, Verlage und Bibliotheken. Einige Tätigkeiten sind im Folgenden aufgeführt.
– Herausgabe des wöchentlich erscheinenden ”Börsenblattes für den Deutschen Buchhandel”. Das ”Börsenblatt. Wochenmagazin für den Deutschen Buchhandel” ist das offizielle Verbandsorgan des Börsenvereins und
zugleich die auflagenstärkste buchhändlerische Fachzeitschrift (Auflage
11000 Exemplare). Im Internet bietet boersenblatt.net laufend aktualisierte Nachrichten und zusätliche Serviceangebote.
– Herausgabe des ”Buchjournals”, das Kundenmagazin des deutschsprachigen Buchhandels. Es erscheint sechsmal jährlich mit einer Auflage von
jeweils 320000 Exemplaren in Deutschland, Österreich und in der Schweiz
und ist in mehr als 2500 Buchhandlungen kostenlos erhältlich.
– Veröffentlichung der von der Deutschen Bibliothek herausgegebenen Deutschen Nationalbibliographie.
– Betreiber der VLB - Datenbank. Das VLB Verzeichnis lieferbarer Bücher
listet seit über 30 Jahren nahezu alle lieferbaren deutschsprachigen Publikationen. Zurzeit sind über das VLB Informationen über rund 1,2 Millionen Titel von etwa 20000 Verlagen verfügbar.
– Pflege des Adresspools von Verlagen, Buch- und Musikalienhandlungen,
Antiquariaten sowie branchenrelevanten Institutionen.
– Verwaltung der für die buchhändlerischen Geschäftsbeziehungen unerlässlichen Verkehrsnummern.
– Vergabe der Internationalen Standardbuchnummern (ISBN) und seit 1994
der Internationalen Standard-Musiknummern (ISMN).
• Der Börsenverein des Deutschen Buchhandels wurde 1825 als ”Börsenverein der deutschen Buchhändler” in Leipzig gegründet. Er vertritt als Spitzenorganisation des herstellenden und verbreitenden Buchhandels in der Bundesrepublik Deutschland die Interessen von über 5900 Mitgliedsfirmen (Verlage, Buchhandlungen, Antiquariate, Zwischenbuchhändler und Verlagsvertreter). Darüber hinaus ist der Börsenverein Ausrichter der Frankfurter Buchmesse und verleiht jährlich den Friedenspreis des Deutschen Buchhandels sowie den
Deutschen Buchpreis für den besten deutschsprachigen Roman des Jahres.
1.5. Prüfziffernsysteme
21
Bemerkung 1.5.3.
Es sei A ein (endliches) Alphabet. Dann sind die häufigsten Fehler, welche bei der
Eingabe eines Wortes über dem Alphabet A auftreten, in der folgenden Tabelle angegeben (nach J. Verhoeff (1969)).
Fehlertyp
Einzelfehler
(Verwechselung einer Ziffer)
Nachbar-Transpositionen
Vertauschung benachbarter Ziffern
Sprungtranspositionen
(Vertauschung einer Ziffer
mit der übernächsten)
Zwillingsfehler
phonetische Fehler
(z.B.: dreißig - dreizehn)
Sprung-Zwilling-Fehler
übrige Fehler
(zufällige Fehler)
Symbol
rel. Häufigkeit
a→b
79.0%
ab → ba
10.2%
abc → cba
0.8%
aa → bb
a0 ←→ 1a
a = 3, . . . , 9
aca → bcb
0.6%
0.5%
0.3%
8.6%
Satz 1.5.4 (Einzelfehlererkennung bein ISBN - System).
Das ISBN - System erkennt alle ”Einzelfehler”. Dabei entsteht ein ”Einzelfehler” in
einer ISBN
a1 a2 . . . a9 a10 , ai ∈ A = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, X},
dadurch, dass genau ein Zeichen ai , i ∈ {1, 2, . . . , 10}, ersetzt wird durch ein anderes
Zeichen b ∈ A, b 6= ai .
Beweis:
Angenommen, die korrekte ISBN
a1 . . . ai−1 ai ai+1 . . . a10
ist an der i-ten Stelle durch einen Eingabefehler verändert worden, also der Eintrag
ai ist ersetzt worden durch b ∈ A mit b 6= ai . Die Kontrollgleichung der korrekten
ISBN lautet
a1 + . . . + i · ai + . . . + 10 · a10 ≡ 0 (mod 11).
Angenommen, die abgeänderte ISBN
a1 . . . ai−1 b ai+1 . . . a10
erfüllt auch die Kontrollgleichung, d.h.
a1 + . . . + i · b + . . . + 10 · a10 ≡ 0 (mod 11).
1.5. Prüfziffernsysteme
22
Subtraktion der beiden Kongruenzen liefert
i · ai − i · b = i · (ai − b) ≡ 0 (mod 11),
also
11 | i · (ai − b).
Wegen i ∈ {1, 2, . . . , 10} gilt 11 ∤ i, und da 11 eine Primzahl ist, gilt damit
11 | (ai − b), also ai ≡ b (mod 11),
und wegen ai , b ∈ A = {0, 1, 2, . . . , 9, X} folgt
ai = b
im Widerspruch zu der Voraussetzung ai 6= b. Damit kann die abgeänderte ISBN
die Kontrollgleichung nicht erfüllen.
Allgemein gilt für jedes (lineares) Prüfziffernsystem modulo m der folgende, nicht
schwer zu beweisende Satz. Für den Beweis wird aber eine Folgerung aus dem Euklidischen Algorithmus benötigt. Der Beweis wird im Verlauf der Vorlesung Mathematik erbracht werden. Es zeigt sich, dass die entscheidende Voraussetzung für die
Gültigkeit des folgenden Satzes die Teilerfremdheit aller Gewichte ist.
Satz 1.5.5 (Einzelfehlererkennung).
Für jedes (lineare) Prüfziffernsystem modulo m gelten die beiden folgenden Aussagen.
1. Für ein gegebenes Wort a1 a2 . . . an−1 der Länge (n − 1) über dem Alphabet
A ist das Prüfzeichen an eindeutig bestimmt.
2. Jedes (lineare) Prüfzeichensystem modulo m erkennt alle ”Einzelfehler”. Dabei entsteht ein ”Einzelfehler” in einem ”Codewort” a1 a2 . . . an−1 an über
dem Alphabet A der Länge n dadurch, dass genau ein Zeichen, z. B. ai , i ∈
{1, 2, . . . , n}, ersetzt wird durch einen anderen ”Buchstaben” b ∈ A, b 6= ai .
Satz 1.5.6 (Erkennung von Nachbar-Transpositionen beim ISBN - System).
Eine ”Nachbar-Transposition” in einer ISBN
a1 a2 . . . a9 a10 , ai ∈ A = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, X},
entsteht dadurch, dass bei der Eingabe zwei benachbarte ”Zeichen” vertauscht werden (ab → ba) und der Rest unverändert bleibt. Das ISBN - System erkennt alle
”Nachbar-Transpositionen”.
1.5. Prüfziffernsysteme
23
Beweis:
Angenommen, die korrekte ISBN
a1 . . . ai ai+1 . . . a10 , ai+1 6= ai , i ∈ {1, 2, . . . , 9}
ist an der Stelle (i, i + 1) durch eine Nachbar-Transposition verändert worden zu
a1 . . . ai+1 ai . . . a10 .
Die korrekte ISBN erfüllt die Kontrollgleichung
a1 + . . . + i · ai + (i + 1) · ai+1 + . . . + 10 · a10 ≡ 0 (mod 11).
Angenommen, die durch eine Nachbar-Transposition abgeänderte ISBN erfüllt ebenfalls die Kontrollgleichung. In diesem Fall müsste
a1 + . . . + i · ai+1 + (i + 1) · ai + . . . + 10 · a10 ≡ 0 (mod 11)
gelten. Subtraktion der beiden Kongruenzen liefert
i · (ai − ai+1 ) + (i + 1) · (ai+1 − ai ) = ai+1 − ai ≡ 0 (mod 11),
also wegen ai , ai+1 ∈ A = {0, 1, 2, . . . , 9, X}
ai = ai+1
im Widerspruch zur Voraussetzung ai 6= ai+1 . Dies bedeutet aber, dass die abgeänderte ISBN die Kontrollgleichung nicht erfüllen kann.
Das ISBN - System erkennt auch eine Reihe weiterer Fehler. Exemplarisch wir der
folgende Satz angegeben, welcher sich analog zu Satz 1.5.6 beweisen lässt.
Satz 1.5.7.
Ein ”allgemeiner Drehfehler” bei einer ISBN a1 a2 . . . a10 , ai ∈ {0, 1, 2, . . . , 9, X}
entsteht dadurch, dass genau zwei ”Zeichen” ai und aj , ai 6= aj , i 6= j, i, j ∈
{1, 2, . . . , 10}, vertauscht werden und der Rest ungeändert bleibt. Aus der korrekten
ISBN
a1 . . . ai . . . aj . . . a10 , ai 6= aj , i 6= j, i, j ∈ {1, 2, . . . , 9, 10}
entsteht also bei einem allgemeinen Drehfehler die Nummer
a1 . . . aj . . . ai . . . a10 .
Das ISBN - System erkennt stets derartige ”allgemeine Drehfehler”.
1.6. EAN und GTIN
1.6
24
EAN und GTIN
EAN steht für die Europäische Artikel-Nummer und ist das bei uns am weitesten verbreitete Prüfziffernsystem für die Kennzeichnung von Konsumgütern und
Verpackungen. Der EAN-Code existiert in zwei Ausführungen, der platzsparenden
8-stelligen Version und der 13-stelligen Normalversion, die am weitesten verbreitet
ist. Wir werden uns im Folgenden mit der 13-stelligen Version EAN-13 beschäftigen.
Wie die ISBN - System ist auch das Verfahren der EAN-Nummern (Europäische
Artikelnummern) ein Prüfziffernsystem. Mit den Bezeichnungen aus Definition 1.5.1.
gilt hier
n = 13, m = 10, c = 0,
sowie
A = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9},
und die Gewichte lauten
1,
ωi =
3,
falls i ungerade ist,
falls i gerade ist,
i = 1, 2, . . . , 13.
Die Kontrollgleichung lautet daher
a1 +3·a2 +a3 +3·a4 +a5 +3·a6 +a7 +3·a8 +a9 +3·a10 +a11 +3·a12 +a13 ≡ 0 ( mod 10),
oder aufgelöst nach der Prüfziffer
a13 ≡ − (a1 + 3 · a2 + . . . + a11 + 3 · a12 ) (mod 10).
Beachte
Für die Gewichte ωi des EAN - Systems gilt wieder
ggT(ωi , m) = ggT(ωi , 10) = 1,
i = 1, 2, . . . , 13.
Wie jedes lineare Prüfzeichensystem modulo m erkennt auch das EAN - System alle
Einzelfehler. Da wir diese allgemeine Aussage nicht bewiesen haben, werden wir den
folgenden Satz beweisen.
Satz 1.6.1 (Einzelfehlererkennung bein EAN - System).
Das EAN - System erkennt alle ”Einzelfehler”. Dabei entsteht ein ”Einzelfehler” in
einer EAN
a1 a2 . . . a12 a13 ,
ai ∈ A = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9},
dadurch, dass genau ein Zeichen ai , i ∈ {1, 2, . . . , 12, 13}, ersetzt wird durch ein
anderes Zeichen b ∈ A, b 6= ai .
1.6. EAN und GTIN
25
Beweis:
Angenommen, die korrekte EAN
a1 . . . ai . . . a13
ist an der i-ten Stelle durch einen Eingabefehler verändert worden, also der Eintrag
ai ist ersetzt worden durch b ∈ A mit b 6= ai . Die Kontrollgleichung der korrekten
EAN lautet
a1 + . . . + ωi · ai + . . . + a13 ≡ 0 (mod 10)
mit
ωi =
1 , falls i ungerade,
3 , falls i gerade,
i = 1, 2, . . . , 13.
Angenommen, die abgeänderte EAN
a1 . . . b . . . a13
erfüllt auch die Kontrollgleichung, d.h.
a1 + . . . + ωi · b + . . . + a13 ≡ 0 (mod 10).
Subtraktion der beiden Kongruenzen liefert
ωi · ai − ωi · b = ωi · (ai − b) ≡ 0 (mod 10),
also
10 | ωi · (ai − b).
Wegen ωi ∈ {1, 3} gilt ggT(ωi , 10) = 1, und damit
10 | (ai − b), also ai ≡ b (mod 10),
und wegen ai , b ∈ A = {0, 1, 2, . . . , 9} folgt
ai = b
im Widerspruch zu der Voraussetzung ai 6= b. Damit kann die abgeänderte EAN die
Kontrollgleichung nicht erfüllen.
Satz 1.6.2 (Erkennung von Nachbar-Transpositionen beim EAN - System).
Eine ”Nachbar-Transposition” in einer EAN
a1 a2 . . . a12 a13 ,
ai ∈ A = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9},
entsteht dadurch, dass bei der Eingabe zwei benachbarte ”Zeichen” vertauscht werden
(ab → ba) und der Rest unverändert bleibt. Das EAN - System deckt NachbarTranspositionen, d.h. Drehfehler benachbarter, voneinander verschiedener Ziffern
genau dann nicht auf, wenn die beiden benachbarten Ziffern sich um 5 unterscheiden.
In allen anderen Fällen werden Nachbar-Transpositionen erkannt.
1.7. Aufbau der EAN und Organisation
26
Beweis:
Um das Verhalten des EAN - Systems bei Nachbar-Transpositionen (ai ai+1 →
ai+1 ai ) zu untersuchen, muss für x, y ∈ {0, 1, 2, 3, 4, 5, 6, 7, 8, 9}, x 6= y, die Kongruenz
ωi · x + ωi+1 · y ≡ ωi · y + ωi+1 · x (mod 10)
untersucht werden.
1.ter Fall: i ≡ 1 (mod 2)
Angenommen, es gibt x, y ∈ {0, 1, 2, 3, 4, 5, 6, 7, 8, 9}, x 6= y, mit
ωi · x + ωi+1 · y ≡ ωi · y + ωi+1 · x (mod 10).
Dann erhält man
x + 3 · y ≡ y + 3 · x (mod 10) ⇐⇒ 2 · y ≡ 2 · x (mod 10) ⇐⇒ y ≡ x (mod 5).
Dies bedeutet, dass die Nachbar-Transposition ai ai+1 −→ ai+1 ai genau dann nicht
aufgedeckt wird, wenn sich die beiden benachbarten Ziffern um 5 unterscheiden.
2.ter Fall: i ≡ 0 (mod 2)
Angenommen, es gibt x, y ∈ {0, 1, 2, 3, 4, 5, 6, 7, 8, 9}, x 6= y, mit
ωi · x + ωi+1 · y ≡ ωi · y + ωi+1 · x (mod 10).
Dann erhält man
3 · x + y ≡ 3 · y + x (mod 10) ⇐⇒ 2 · x ≡ 2 · y (mod 10) ⇐⇒ x ≡ y (mod 5).
Also auch in diesem Fall wird die Nachbar-Transposition ai ai+1 −→ ai+1 ai genau
dann nicht aufgedeckt wird, wenn sich die beiden benachbarten Ziffern um 5 unterscheiden.
Insgesamt: Nachbar-Transpositionen, d.h. Drehfehler benachbarter, voneinander
verschiedener Ziffern werden durch das EAN-System genau dann nicht aufgedeckt,
wenn die beiden benachbarten Ziffern sich um 5 unterscheiden.
1.7
Aufbau der EAN und Organisation
Im Zuge der weltweiten Globalisierung und des damit einhergehenden weltweiten,
internationalen Handels spielen überschneidungsfreie Artikelnummern eine immer
größere Rolle in der internationalen Wirtschaft. Die Vorteile der Systeme liegen auf
der Hand. Durch eine weltweite Standardisierung wird der Prozess der Datenkommunikation wesentlich vereinfacht. Informationen über die Produkte können direkt
über die Codes weitergegeben werden und von standardisierten Lesesystemen an
1.7. Aufbau der EAN und Organisation
27
nahezu jedem Ort der Welt decodiert werden. Ebenso lässt sich durch diese Eigenschaften die Lagerhaltung von diversen Produkten weitestgehend automatisieren,
indem man sie mit entsprechenden Identifizierungscodes ausstattet. Der Komfort
für Kunden und Händler wird erhöht, denn Tippfehler an der Supermarktkasse werden nahezu ausgeschlossen und die Preisangabe auf jedem einzelnen Artikel ist somit
auch nicht mehr zwingend nötig. Es reicht die Preisauszeichnung der Artikel am jeweiligen Regal aus. Um die Artikelnummern maschinell lesbar zu machen, werden
sie umgewandelt in sogenannte (lineare) Barcodes, ein zum Prüfziffernsystem äquivalenter Strichcode, über dessen Erstellung im nächsten Abschnitt kurz berichtet
wird.
Das international wichtigste Artikelnummernsystem ist das oben beschriebene EANSystem (European-Article-Number), dass Mitte der 70er Jahre des letzten Jahrhunderts entwickelt wurde und 1977 in Deutschland eingeführt wurde. Da das EANSystem, wie der Name schon sagt, aus Europa stammt, gab es im Zuge einer Internationalisierung in den letzten Jahren einige Änderungen. So existiert die EAN
in ihrer ursprünglichen Form heute zumindest offiziell nicht mehr. Sie wurde vom
System der GTIN abgelöst. GTIN ist die Abkürzung für die englische Bezeichnung
Global Trade Item Number und kann ins Deutsche mit Globale Artikelidentnummer übersetzt werden. De facto ist der Unterschied allerdings marginal, und es ist
mehr eine reine terminologische Sache als eine große Umstellung des allgemeinen
System.
Die Anfänge der Entwicklung von Artikelnummern reichen bereits bis in die Mitte des 20. Jahrhunderts zurück. Besonders beim amerikanischen Militär gab es im
zweiten Weltkrieg erste Bestrebungen, die Bestände an Material möglichst effizient
zu katalogisieren und erfassen zu können. Aufgrund mangelnder technischer Entwicklungen dauert es jedoch bis Mitte der 50er Jahre, bis die ersten Barcodesysteme
auch auf den Markt gelangten. Weitere 15 Jahre dauerte es, bis Anfang der 70er die
Mikroprozessoren erfunden wurde und das System der Artikelnummern bzw. in diesem Fall besonders das technische System der Barcodes den Massenmarkt erreichte.
Die Entwicklung des EAN-Systems kam somit erst Mitte der 70er Jahre zum Tragen.
In den USA wurde 1972 das System des UPC, des Universal Product Code eingeführt. Dabei handelte es sich um einen 12-stelligen Code zur Identifizierung und
Kennzeichnung von Artikeln. Der erste verkaufte Artikel mit dem neuen System war
im Übrigen eine Packung Fruchtkaugummi. In Folge diese Einführung begann man,
1973, sich auch in Europa Gedanken über ein solches System zu machen. Dieses
sollte nach Möglichkeit zum UPC kompatibel sein, um einen möglichst einfachen
internationalen Warenaustausch gewährleisten zu können.
Auf nationaler Ebene wurde bereits Ende der 60er Jahre über ein einheitliches Artikelidentifikationssystem nachgedacht. In Folge dieser Bemühungen kam es 1969
zur Einführung der BAN (bundeseinheitliche Artikelnummerierung). Dieses System
klassifizierte und ordnete Artikel in Gruppen ein und war somit der deutsche Vor-
1.7. Aufbau der EAN und Organisation
28
gänger des EAN - Systems. Durch die Einführung der EAN 1977 wurde es allerdings
wieder aufgegeben.
3 Jahre vor Einführung der EAN, also 1974, wurde in Köln die CCG (Centrale
für Coorganisation) gegründet. Sie verschrieb sich dem Ziel der Etablierung einheitlicher Standards für Industrie und Handel und übernahm ab 1977 die Vergabe
und Koordinierung der EAN-Nummern in Deutschland. Zentrale Aufgabe von GS1
Germany, wie die CCG heute heißt, ist es, den Daten- und Warenverkehr mit Hilfe
von Standards zu automatisieren und somit unternehmensübergreifende Organisationsabläufe effizienter zu gestalten.
1977 wurde durch das Bestreben von 12 europäischen Staaten, darunter alle EGStaaten, die EAA, die European Article Association mit Sitz in Brüssel, gegründet
und der EAN-Code eingeführt. Er umfasst, wie bereits oben beschrieben, in seiner
Grundform 13 Stellen und unterscheidet sich nur marginal zum UPC Code aus den
USA. Der einzige Unterschied liegt in dem Hinzufügen einer führenden Null, falls
man einen UPC Code als EAN Code darstellen möchte. Aus diesem Grund wurden
in der damaligen Zeit von vielen internationalen Unternehmen vorwiegend UPC Codes verwendet, welche dann durch das Hinzufügen der führenden Null auch für das
EAN System validiert wurden. Schon wenige Jahre nach der Einführung der EAN in
Europa wurde das System in anderen Teilen der Welt, beispielsweise im asiatischen
und südamerikanischen Raum, übernommen, und die EAN wurde mit der Zeit eher
als internationale Artikelnummer, denn als europäische Artikelnummer bekannt.
Die EAA konnte jedoch nur kurz ihren ursprünglichen Namen behalten und wurde schon bald in EAN International umbenannt. So heißt sie heute allerdings auch
nicht mehr. 2005 fusionierten die EAN International sowie der Uniform Code Council (UCC), welcher für die Vergabe der UPC Codes in Amerika zuständig ist, zu der
Organisation Global Standarts One (GS1). Diese Non-Profit-Organisation hat ihre
Hauptsitze in Brüssel sowie Lawrenceville, New Jersey, und ist die Dachorganisation
der diversen Tochterniederlassungen in den einzelnen Mitgliedsländern. Dazu gehört
in Deutschland auch die GS1 Germany, welche 2005 aus der CCG heraus entstand.
Wie bereits oben schon erwähnt, kam es nicht nur bei den Organisationen zu diversen Umbenennungen, sondern auch das eigentliche System wurde international
angepasst. So existiert der EAN Code zumindest offiziell nicht mehr. Im Zuge der
Internationalisierung der gesamten Verwaltung durch GS1 wünschte man sich ein
einheitliches System, welches sowohl in Amerika, als auch in Europa seine Gültigkeit
hat. EAN und UPC sollten also abgeschafft beziehungsweise zusammengelegt werden. Der Unterschied zwischen beiden Codes ist zwar nur marginal, ein einheitliches
System wird allerdings trotzdem bevorzugt. Anfang 2009 wurde damit das System
der GTIN (Global Trade Item Number) eingeführt. Es umfasst sowohl die EAN
als auch die amerikanischen UPC Nummern. In seiner Grundform besteht der Code
aus 14, 13, 12 oder 8 Stellen.
1.7. Aufbau der EAN und Organisation
29
Bei der Version mit 14 Ziffern kommt der ersten Stelle eine besondere Bedeutung
zu, denn sie definiert die Verpackungseinheit. Die restlichen Stellen setzen sich aus
dem bisherigen System der EAN bzw. UPC zusammen. Gegebenenfalls füllt man mit
führenden Nullen auf, um auf 14 Stellen zu kommen. Die Versionen mit 13, 12 oder 8
Stellen setzen sich genauso zusammen, wie die Nummern, aus denen sie entstanden
sind (EAN bzw. UPC Code). Es handelt sich hierbei also mehr um eine formelle und
terminologische Umstellung. In der Realität behält das System der EAN weiterhin
seine Gültigkeit. Auch die GS1 Germany empfiehlt weiterhin die Verwendung der
13-stelligen Nummern, allerdings unter der neuen Bezeichnung GTIN. Das System
mit 14 Stellen konnte sich bisher nicht etablieren, wird aber in der Zukunft sicherlich
eine größere Rolle spielen.
Insgesamt besteht das globale GS1 Netzwerk (Stand 2007) aus 104 Länderorganisationen. Das System der GTIN wird in Deutschland laut Angaben von GS1 von
ca. 130.000 Unternehmen und weltweit sogar von rund einer Million Unternehmen
verwendet.
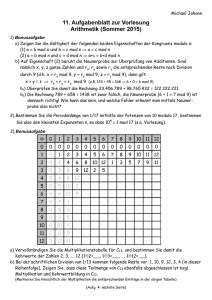
Da die 14-stellige Version der GTIN sich bisher noch nicht durchgesetzt hat und
eigentlich noch keine Verwendung findet, Wird der Aufbau der Nummer im Folgenden am Beispiel der 13-stelligen Version, also der ursprünglichen EAN Codierung,
erklärt. Generell lassen sich bei der GTIN Nummer 3 Bereiche unterscheiden. Die ersten 7, 8 oder 9 Ziffern werden durch die Basisnummer des jeweiligen Unternehmens
bestimmt. Anschließend folgen je nach Länge der Basisnummer entweder 3,4 oder 5
Ziffern, die für die fortlaufende Artikelnummerierung bestimmt sind. Abschließend
bildet die 13. Stelle die Prüfziffer der gesamten Nummer.
Aufbau der GTIN, Quelle: www.gs1-germany.de
Die Basisnummer selbst leitet sich von der GLN, der globalen Lokationsnummer
des jeweiligen Unternehmens, ab. Diese GLN besteht aus insgesamt ebenfalls 13
Ziffern, wobei die ersten 7-9 Ziffern dann die für die GTIN verwendete Basisnummer bilden. Analog zu den GTIN Codes selbst muss auch die GLN bei der GS1
1.7. Aufbau der EAN und Organisation
30
Zentrale gegen eine jährliche Lizenzgebühr beantragt werden. Sie identifiziert das
entsprechende Unternehmen weltweit mit vollständiger Betriebsbezeichnung sowie
deren Anschrift.
Wie auf dem Bild zu sehen teilt sich die Basisnummer wiederum auch noch einmal
in 2 Teile auf. Von entscheidender Bedeutung sind hier allerdings nur die ersten drei
Ziffern. Sie stellen das Länderpräfix dar und geben das jeweilige Land an, in dem
diese GLN lizensiert wurde. Die Ziffern 400-440 stehen beispielsweise für Deutschland oder 760 bis 769 für die Schweiz. Die Betriebsnummern sind weltweit einzigartig
und gewähren somit die internationale Identifikation der einzelnen Betriebe.
Damit lässt sich übrigens auch erklären, dass die Artikelnummer eines Produktes
nicht zwangsläufig, wie oft fälschlicherweise angenommen, auf deren Herkunftsort
schließen lässt. Wie eben erklärt, symbolisiert das Länderpräfix nur das Land der
GLN Vergabe. Jedoch können auch in Deutschland ansässige Firmen im Ausland
ihre Produkte produzieren und diese dann mit einer 400... Artikelnummer versehen.
In der folgenden Liste sind einige Länderpräfixe aufgeführt. Eine vollständige Liste
aller Länderpräfixe findet man auf den Internetseiten von GS1 Germany.
Länderpräfix
30 bis 37
400 bis 440
54
590
600 bis 601
611
76
Land
GS1 France
GS1 Germany
GS1 Belgium and Luxemburg
GS1 Poland
GS1 South Africa
GS1 Morocco
GS1 Switzerland
Länderpräfix
80 bis 83
84
885
87
90 bis 91
93
978 bis 979
Land
GS1 Italy
GS1 Spain
GS1 Thailand
GS1 Netherlands
GS1 Austria
GS1 Australia
Bücher (ISBN)
Wie bereits erwähnt kommt bei dem System der ISBN-13 dann mit 978 bzw. 979 ein
fiktives Buchland zur Artikelkennzeichnung zur Anwendung. Eine ISBN-13 entsteht
aus einer ISBN-10 wie folgt.
• Im ersten Schritt wird die ISBN-10-Prüfziffer gestrichen.
• Im zweiten Schritt wird der verbleibenden 9-stelligen Nummer die Buchlandkennzeichnung 978 oder 979 vorangestellt.
• In dritten Schritt wird von der jetzt 12-stelligen Nummer die Prüfziffer nach
dem EAN-Verfahren berechnet und als 13. Ziffer angehängt.
Durch das hierzu inverse Verfahren kann natürlich auch aus jeder ISBN-13 eine
herkömmliche ISBN-10 bestimmt werden. Die Verwendung der ISBN-13 ist seit dem
1. Januar 2007 vorgeschrieben. In vielen Verlagskatalogen findet man aber auch heute noch zusätzlich die Angabe der entsprechenden ISBN-10.
Die auf die Betriebsnummer folgenden 3, 4 oder 5 Ziffern stehen dem Unternehmen
zu freien Verfügung. Sie dienen der Nummerierung und Kennzeichnung der einzelnen
Artikel. Je nach Umfang des Artikelsortiments muss bei der Beantragung der GLN
1.8. Barcodes
31
bereits darauf geachtet werden, ob eine 7,8 oder 9-stellige GLN Nummer beantragt
werden kann. Je nach Länge der Betriebsnummer können dann entsprechend 1.000,
10.000 oder 100.000 eigene Artikel gekennzeichnet werden. Grundsätzlich sollen diese Nummern fortlaufend vergeben werden ohne irgendwelche Signifikanzen innerhalb
des Unternehmens. Es gibt genau definierte Regeln, in welchen Fällen ein Produkt
mit einer neuen Nummer gekennzeichnet werden muss. Allgemeinhin lässt sich jedoch sagen, dass jede Artikelvariante sowie jede Artikelspezifikation in Hinblick auf
beispielsweise die Packungsgröße mit einer eigenen GTIN Nummer gekennzeichnet
werden muss.
Die letzte Ziffer der Nummer besteht aus der Prüfziffer, welche sich mit dem oben
beschriebenen Verfahren aus den ersten 12 Stellen berechnet.
Zum Abschluss dieses Abschnittes soll noch einmal kurz auf die 8-stellige GTIN
Kurznummer eingegangen werden. Sie besteht ebenfalls aus drei Teilen. Die ersten
3 Ziffern stellen das schon bekannte Länderpräfix dar. Die darauf folgenden 4 Ziffern repräsentieren die Artikelnummer selbst und anschließend folgt an 8. Stelle die
bekannte Prüfziffer. Aufgrund der Tatsache, dass die GTIN Kurznummer nicht an
eine Basisnummer gebunden ist, ist ihre Vergabe ein wenig anders im Vergleich zur
normalen GTIN Nummer. Die Kurznummer müssen jeweils einzeln bei der lokalen
GS1 Gesellschaft beantragt werden und gelten dann nur für das entsprechen lizensierte Produkt. Eine eigenmächtige Kennzeichnung seitens der Firmen ist hier nicht
möglich.
1.8
Barcodes
Als Strichcode oder Barcode (engl. bar für Balken) wird eine optoelektronisch lesbare Schrift bezeichnet, die aus verschieden breiten, parallelen Strichen und Lücken
besteht. Der Begriff Code steht hierbei nicht für eine Verschlüsselung von Daten,
sondern für die Abbildung von Daten in binären Symbolen. Die Daten in einem
Strichcode werden mit optischen Lesegeräten, wie z.B. Barcodelesegeräten (Scanner)
oder Kameras, maschinell eingelesen und elektronisch weiterverarbeitet. Der große
Vorteil der Barcodetechnik besteht darin, dass Prüfzeichensysteme (wie das EAN
- System) maschinenlesbar gemacht werden. Eine der wichtigsten Beispiele ist die
Zahlungsabwicklung an der Kasse des Supermarktes. Die Technik vereinfacht zudem
die Inventarisierung ungemein. Doch nicht nur im kleinen ist die Barcodetechnologie
zu finden, sondern auch in großen Industrieunternehmen. Die Logistikbranche nutzt
Barcodes als Erfassungsmethode für Waren bei der Kommissionierung. In diesem
Bereich liegt der Fall vor, dass viele verschiedene Waren unterschiedlichster Hersteller schnellstmöglich kommissioniert und weiterversendet werden müssen. Durch den
Code auf der Ware und einem auf den Auftragspapieren wird eine exakte Zuordnung
des Auftrags mit der kommissionierten Ware ermöglicht. Im Automobilsektor, der
zugleich auch Vorreiter auf diesem Gebiet war, wird die Technologie ebenfalls verwendet. Hier sorgen eine große Modellvielfalt und die hohe Informationskomplexität
1.8. Barcodes
32
bei der Montage dafür, dass ein Kontrollfluss der Ware benötigt wird. Barcodes
ermöglichen es, alle Produktionsteile zu identifizieren und an die richtige Stelle im
Montageverlauf zu übergeben.
Bereits 1949 wurde der erste Barcode in den USA zum Patent angemeldet. Die
Entwicklung von Artikelnummernsystemen kam jedoch erst durch die Entwicklungen der optoelektronischen Industrie in den 50er Jahren in Schwung. Die damalige
Entwicklung von Scannern zum Lesen der Barcodes ermöglichte, zusammen mit der
Entwicklung der entsprechenden Computerelektronik in den 70er Jahren, die Barcodetechnologie kostengünstig und effizient einsetzen zu können. Unterstützt wurde
die Entwicklung durch ein 1982 in den USA verabschiedetes Gesetz, welches vorschrieb, alle in den USA genutzten militärischen Geräte mit einem Barcode zur
Identifizierung auszustatten. Zwangsläufig mussten sich somit auch die zahlreichen
Zulieferbetriebe auf das System einstellen. Da auch diese Betriebe wiederum Zulieferbetriebe haben, breite sich die Technologie über zunehmend alle industriellen
Bereiche aus, um wettbewerbsfähig bleiben zu können.
Eine moderne Weiterentwicklung stellen die 2D-Barcodes (Datamatrix) dar, die jeder schon auf erhaltener Behördenpost oder Infopost gesehen hat.
Datamatrix-Code auf einem Infobrief der DMV (Deutsche Mathematiker Vereinigung)
an den Institutsleiter des Instituts für Stochastik Prof. Dr. G. Last
Mit dem Datamatrix-Code lässt sich auf kleinster Fläche eine Fülle von verschlüsselten, elektronisch lesbaren Informationen unterbringen. Dies ist möglich, weil der
Datamatrix-Code im Gegensatz etwa zu einem EAN-Strichcode zweidimensional
aufgebaut ist.
Der Data Matrix Code ist ein 42 Byte großer, zweidimensionaler Barcode. Er enthält
zum einen alle Produkt- und Abrechnungsangaben, die die Post für die Qualitätssicherung ihrer Produktionen und Auslieferungen nutzt. Zum anderen stellt er eine weitere Speichermöglichkeit im Umfang von elf Byte bereit. Diese Kapazität
kann der Postkunde individuell nutzen und beispielsweise Zusatzinformationen zum
Retourenmanagement in den Code integrieren. Diese neue Technologie zur DVFREIMACHUNG hat den herkömmlichen Freimachungsvermerk mit Postabrechnungsnummer abgelöst.
1.8. Barcodes
33
Anwendung 1.8.1 (Der Aufbau der Strichcodes bein EAN - System).
Die Darstellung der EAN als Strichcodierung erfolgt in zwei Blöcken. Der linke Block
enthält die Stellen 2 bis 7, der rechte Block die Stellen 8 bis 13 der EAN. Die erste
Stelle wird durch ein besonderes Verfahren im linken Block ”versteckt”. Je zwei
schmale, nach unten etwas längere Striche dienen links und rechts als Randzeichen
sowie als Trennzeichen in der Mitte.
EAN - Nummer: a1 |a2 . . . a7 | a8 . . . a13
Jedes ai , i = 2, 3, . . . , 13, wird durch eine Folge von 7 ”ausgefüllten” (∼
= 1) oder
∼
”leeren” (= 0) Balken codiert. Dabei sind die Ziffern
a2 , . . . , a7 jeweils nach Code A oder B (abhängig von a1 )
und die Ziffern
a8 , . . . , a13 immer nach Code C
codiert gemäß der folgenden Code-Tabelle.
Die erste Ziffer a1 wird wie folgt in die Codierung eingearbeitet. In Abhängigkeit von
der ersten Ziffer a1 wird mit Hilfe der folgenden Tabelle die Auswahl der Codierung
A und B für den linken Block a2 , . . . , a7 vorgenommen.
1.Ziffer
0
1
2
3
4
Codemuster
für linke Seite
AAAAAA
AABABB
AABBAB
AABBBA
ABAABB
1.Ziffer
5
6
7
8
9
Codemuster
für linke Seite
ABBAAB
ABBBAA
ABABAB
ABABBA
ABBABA
• Jede Ziffer wird durch sieben Dualziffern so kodiert, dass zwei dunkle und zwei
helle Streifen unterschiedlicher Breite entstehen.
• Der Code A ergibt sich aus Code C, indem man die jeweilige Stelle negiert.
1.8. Barcodes
34
• Der Code B entsteht aus Code C, indem man die Reihenfolge von Schwarz
und weiss genau umkehrt.
• Dabei beginnen Code A und Code B mit einem hellen Streifen und enden mit
einem dunklen Streifen, bei Code C ist es genau umgekehrt.
Die Codes sind so gewählt, dass der Computer erkennen kann, ob die Streifen mit
dem Lesegerät von rechts nach links oder umgekehrt gelesen werden. Der Wechsel der Codierungen A und B wurde eingeführt, um die erste Ziffer einzuarbeiten,
diese erste Ziffer gibt es in den USA (teilweise) nicht. Hier wird für die Codierung
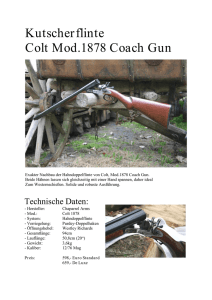
der linken Hälfte nur der Code A verwendet. Das folgende Bild zeigt eine typische
Strichcodierung, wie man Sie heute auf fast jedem Produkt findet, welches man in
einem Supermarkt kaufen kann.
Wie das Länderpräfix 80 verrät, handelt es sich um ein Produkt, dessen EAN in
Italien beantragt wurde. Die zugehörigen Angaben sind:
Barilla, Spaghetti No.5, 500g Packung, Mantova, 166 Parma, Italien
In Hinblick auf den Verbraucher sind die beiden folgenden Artikel von Interesse.
Strichcode enthält keine Information über die Herkunft eines Lebensmittels
Viele Verbraucher vermuten im Strichcode einen Hinweis auf die Herkunft eines Produktes. Die Verbraucherzentrale Bayern weist aber darauf hin, dass der Strichcode
keinen Rückschluss zulässt, wo ein Produkt hergestellt wurde. Auch die Vermutung,
er enthalte Angaben über Zutaten oder Zusatzstoffe eines Produktes, trifft nicht zu.
Der Strichcode ermöglicht es vielmehr, dass jeder Artikel vom Handel zweifelsfrei
identifiziert werden kann. Er besteht meistens aus 13 Ziffern: Auf eine siebenstellige Betriebsnummer folgt die fünfstellige Artikelnummer, und am Schluss steht die
Prüfziffer. Die Betriebsnummer weist eindeutig Herstellerfirma, Großhändler und
Importeur aus. Die ersten Ziffern geben Aufschluss darüber, in welchem Land der
Strichcode beantragt wurde. So stehen zum Beispiel die Zahlen 40 bis 43 für Deutschland, 50 für Großbritannien und 54 für Belgien und Luxemburg. Die Zahlen 40 bis
43 bedeuten also, dass in Deutschland der Strichcode beantragt wurde, aber nicht,
dass das Produkt auch in Deutschland hergestellt wurde. So ist es möglich, dass eine
1.8. Barcodes
35
Firma aus München für Produkte, die in Portugal hergestellt wurden, in Deutschland die Betriebsnummer beantragt. Diese portugiesischen Produkte tragen dann
die deutschen Länderkennzahlen.
Der Strichcode liefert auch keine Information über die Qualität oder den Preis des
Lebensmittels, so die Verbraucherzentrale Bayern. Er erleichtert vielmehr Herstellern und Händlern die Kontrolle und Ergänzung ihrer Bestände und ermöglicht das
automatische Kassieren mit Scannerkassen.
Quelle: Verbraucherzentrale Bayern
”Zebrastreifen” auf Lebensmitteln Strichcode richtig entschlüsseln
Als jüngst Cola - Flaschen mit gesundheitsbelastendem Kohlendioxid von schlechter
Qualität oder Eier und Federvieh aus Belgien mit Spuren von Dioxin für Schlagzeilen sorgten, lautete oft die Empfehlung-, ”Mit Hilfe des Strichcodesymbols auf der
Verpackung die Herkunft des Produkts prüfen! Die ersten zwei Ziffern unter dem
Balken des ’Zebrastreifens’ geben das Herkunftsland an!” Allerdings.- ”Wer diesem
Hinweisschild folgt, ist auf dem Holzweg”, erläutert die Verbraucherzentrale NRW,
”denn von den Länderziffern kann nicht automatisch auch auf Erzeugungs- und
Produktionsland geschlossen werden. So ist es zum Beispiel möglich, dass eine Vertriebsfirma aus Köln, für Garnelen, die in Taiwan gezüchtet werden, in Deutschland
eine Basis-Nummer beantragt. Die Produkte würden dann am Anfang der BasisNummer die Ziffern für Deutschland aufweisen. Käufersicherheit ist durch diesen
Herkunftscheck also nicht garantiert-” Im Folgenden zeigt die Verbraucherzentrale
NRW auf, was die Ziffern des ”Zebrastreifens” auf Lebensmitteln verbergen.
• Verpackte Lebensmittel und andere Konsumgüter sind heute meist mit der
Internationalen Artikelnummer, kurz EAN, und dem EANStrichcodesymbol
gekennzeichnet. Dieser ”Zebrastreifen” ist nichts anderes als die maschinenlesbare Darstellung der EAN-Nummer, die zum Beispiel von einer SupermarktKasse gelesen werden kann.
• Die EAN-Nummer ist der ”Personal-Ausweis” eines Produkts. Über die EANNummer kann jeder Artikel in seiner spezifischen Ausführung (Farbe, Größe)
eindeutig identifiziert werden. Damit wird zum einen das automatische Kassieren per Scanner ermöglicht, weil von einem zentralen Rechner der gültige Verkaufspreis und auch weitere Informationen abgerufen, registriert und
auf den Kassenbon ausgedruckt werden können. Zum anderen ist der EANStrichcode für Hersteller und Handel ein Grundbaustein, um Lagerbestände
ständig überwachen und bedarfsgerecht wieder auffüllen zu können.
”Für Käuferinnen und Käufer enthält der EAN-Code keine Qualitätsinformationen”,
entschlüsselt die Verbraucherzentrale NRW die Streifen auf Verpackungen und Etiketten, ”und auch über den Preis gibt er für den Kunden keinerlei Auskunft. Wichtig
allerdings : Wenn die EAN vorhanden ist, muss der Preis nicht extra aufgedruckt
sein. Es reicht, wenn die Preisauszeichnung an der Regalleiste erfolgt.”
Quelle: Verbraucherzentrale Nordrhein-Westfalen e.V.
Kapitel 2
Relationen
2.1
Das kartesische Produkt von Mengen
Das kartesiche Produkt von Mengen wurde schon in der ”Einheit Mengenlehre”
eingeführt. Die Namensgebung kartesisches Produkt erinnert an den französischen
Philosophen, Mathematiker und Naturforscher Rene Descartes (1596 - 1650).
Definition 2.1.1.
Sind X, Y zwei Mengen, so heißt die Menge
X × Y = {(x, y) : x ∈ X und y ∈ Y }
aller geordneten Paare (x, y) mit x ∈ X und y ∈ Y das kartesische Produkt der
Mengen X und Y .
Beachte:
Gilt X 6= Y , so gilt: X × Y 6= Y × X.
Beispiel 2.1.2.
(i) Es seien A = {1, 2, 3} und B = {3, 4}. Dann gilt
A × B = {(1, 3), (1, 4), (2, 3), (2, 4), (3, 3), (3, 4)},
B × A = {(3, 1), (3, 2), (3, 3), (4, 1), (4, 2), (4, 3)}.
(ii) Es seien A = {1, 2, 3, 4, 5} und B = {1, 2, 3, 4}. Dann läßt sich das kartesische
Produkt A × B graphisch darstellen als Menge von Punkten in einer Ebene.
B
6
4
s
s
s
s
s
3
s
s
s
s
s
2
s
s
s
s
s
1
s
s
s
s
s
1
2
3
4
5
36
-
A
2.1. Das kartesische Produkt von Mengen
37
Spezialfall:
Im Spezialfall X = Y ist die Notation
X 2 = X × X = {(x, y) : x, y ∈ X}
üblich.
Beachte:
1. Für X 6= ∅ und Y 6= ∅ gilt
|X × Y | = |X| · |Y |.
2. Für X = ∅ oder Y = ∅ gilt
X × Y = ∅.
Definition 2.1.3 (Verallgemeinerungen).
1. Es seien X1 , X2 , . . . , Xn , n ∈ N, beliebige Mengen. Dann heißt die Menge
n
× Xj = X1 × X2 × . . . × Xn = {(x1 , x2, . . . , xn) : xj ∈ Xj ,
j=1
j ∈ {1, 2, . . . , n}}
aller (geordneten) n-Tupel (x1 , x2 , . . . xn ) mit xj ∈ Xj , j ∈ {1, . . . , n}, das
kartesische Produkt der Mengen X1 , X2 , . . . , Xn .
Spezialfall
Gilt X1 = X2 = . . . = Xn = X, so schreibt man
Xn = X
. . × X} = {(x1 , x2 , . . . , xn ) : xj ∈ X, j ∈ {1, 2, . . . , n}}.
| × .{z
n
Faktoren
Beispiel
Für die Menge X = R ergibt sich
Rn = {(x1 , . . . , xn ) : xj ∈ R, j = 1, . . . , n}.
Rn nennt man auch den n-dimensionalen Euklidischen Raum. Im Spezialfall n = 2 ergibt sich die schon aus der Schule bekannte xy-Ebene (Euklidische Ebene)
R2 = {(x, y) : x, y ∈ R}.
2.2. Relationen
38
2. Es sei {Xn }n∈N eine ”Folge” von Mengen. Dann heißt die Menge
× Xn =
n∈N
∞
× Xn = {(xn)n∈N : xn ∈ Xn,
n=1
n ∈ N}
aller Folgen (xn )n∈N mit xn ∈ Xn , n ∈ N, das kartesische Produkt der
Mengenfolge {Xn }n∈N .
Spezialfall
Für alle n ∈ N gelte Xn = X. Dann schreibt man
XN =
∞
× X = n=1
× X = {(xn)n∈N : xn ∈ X,
n∈N
n ∈ N}.
X N heißt die Menge der Folgen über der Menge X.
Beispiel
Für alle n ∈ N gelte Xn = R, dann ergibt sich die Menge alle reellen Zahlfolgen
RN = {(xn )n∈N : xn ∈ R, n ∈ N}.
2.2
Relationen
Auch der Begriff einer Relation wurde schon in der ”Einheit Mengenlehre” eingeführt
und mit einem Beispiel erläutert. Relationen spielen in den Anwendungen bzw. in
der Beschreibung des Alltags eine sehr große Rolle, ohne dass man sich dieser immer
bewusst ist. Eine spezielle besonders wichtige Sorte von Relationen, die sogenannten
Äquivalenzrelationen, wird in Abschnitt 2.3 näher behandelt.
Definition 2.2.1.
1. Jede Teilmenge R ⊂ X × Y heißt eine (zweistellige oder binäre) Relation von
X nach Y , oder auch eine Relation auf X × Y .
2. Jede Teilmenge R ⊂ X1 ×X2 ×. . .×Xn , n ∈ N, heißt eine n-stellige Relation
auf X1 × X2 × . . . × Xn .
Wir beschäftigen uns nur mit zweistelligen Relationen und lassen daher die Angabe
”zweistellig” weg, d.h. wir sprechen nur von Relationen.
Spezialfall
Es seien speziell X = Y und R ⊂ X × X eine Relation. Anstatt von einer Relation
auf X × X zu sprechen, sagt man: R ist eine Relation auf der Menge X.
2.2. Relationen
39
Beispiel 2.2.2 (Lieferbeziehungen als Beispiel für eine Relation).
Vier Lieferanten L1 , L2 , L3 , L4 beliefern drei Einzelhändler E1 , E2 , E3 . Dabei bestehen folgende Lieferbeziehungen
• Lieferant L1 liefert an Einzelhändler E2 und E3 ,
• Lieferant L2 liefert an Einzelhändler E1 und E3 ,
• Lieferant L3 liefert an Einzelhändler E2 ,
• Lieferant L4 liefert an Einzelhändler E1 , E2 und E3 .
Die Menge der Lieferanten und die Menge der Einzelhändler sind dann
L = {L1 , L2 , L3 , L4 }
und
E = {E1 , E2 , E3 }.
Die Lieferbeziehungen lassen sich durch die Relation
(L1 , E2 ), (L1 , E3 ),
(L2 , E1 ), (L2 , E3 ),
R=
⊂ L×E
(L3 , E2 ), (L4 , E1 ),
(L4 , E2 ), (L4 , E3 )
beschreiben.
Beispiel 2.2.3.
Ist X eine nichtleere endliche Menge, so läßt sich jede Relation auf X darstellen als
Menge von Punkten in einer Ebene. Es sei z. B.
X = {1, 2, 3, 4, 5}
und
R = {(1, 1), (1, 3), (2, 1), (2, 4), (2, 5), (3, 5), (4, 1), (4, 5), (5, 3), (5, 4), (5, 5)}.
Diese Relation ist in dem folgenden Bild als Punktmenge in einer Ebene dargestellt.
X
6
5
c
s
s
s
s
4
c
s
c
c
s
3
s
c
c
c
s
2
c
c
c
c
c
1
s
s
c
s
c
1
2
3
4
5
-
X
2.2. Relationen
40
Notation
Ist R ⊂ X × X eine Relation auf der nichtleeren Menge X, so notiert man die
Aussage (x, y) ∈ R oft in der Form xRy (sprich: x steht in der Relation R zu y).
Diese Notation hat für spezielle Arten von Relationen viele Vorteile, wie schon das
folgende Beispiel zeigt.
Beispiel 2.2.4 (Die Gleichheit).
Ist X eine nichtleere Menge, so ist durch R = {(x, x) : x ∈ X} eine Relation auf
der Menge X definiert. Diese Relation heißt die Gleichheit auf X. Zwei Elemente
x, y ∈ X stehen genau dann in der Relation R zueinander, also xRy, falls x = y gilt.
Beispiele 2.2.5 (Weitere Beispiele für Relationen).
1. Es sei X = R. Die Ordnungsrelation R1 ⊂ R × R auf der Menge R der reellen
Zahlen lautet
(x, y) ∈ R1 ⇐⇒ x ≤ y,
x, y ∈ R.
So gilt z. B.
(2, 3) ∈ R1 wegen 2 ≤ 3
und
(5, 3) ∈
/ R1 wegen 5 3.
Ordnungsrelationen werden im letzten Abschnitt dieses Kapitels etwas genauer
betrachtet.
2. Es sei X = Z. Die Teilbarkeitsrelation R2 ⊂ Z ×Z auf der Menge Z der ganzen
Zahlen lautet
(x, y) ∈ R2 ⇐⇒ x | y (also x ist ein Teiler von y), x, y ∈ Z.
So gilt z. B.
(3, 6) ∈ R2 wegen 3 | 6
und
(3, 7) ∈
/ R2 wegen 3 ∤ 7.
3. Es sei X die Menge aller Geraden in der Euklidischen Ebene R2 . Zwei Geraden
stehen in der Relation R3 ⊂ X × X zueinander, falls sie parallel oder gleich
sind, also
(g1 , g2 ) ∈ R3 ⇐⇒ g1 k g2 oder g1 = g2 , g1 , g2 ∈ X.
4. Es sei X 6= ∅ eine nichtleere Menge und Y = P(X) die Potenzmenge von X.
Die Relation R4 ⊂ X × Y = X × P(Y ) sei definiert durch
(x, A) ∈ R4 ⇐⇒ x ∈ A,
x ∈ X, A ∈ P (X).
2.2. Relationen
41
Gilt z. B. X = {1, 2, 3, 4, 5} und A = {1, 3, 5} ⊂ X, so gilt
(1, A) ∈ R4 wegen 1 ∈ A
und
(2, A) ∈
/ R4 wegen 2 ∈
/ A.
5. Es sei X 6= ∅ eine nichtleere Menge und Y = P(X) die Potenzmenge der
Menge X. Die Relation R5 ⊂ Y × Y = P(X) × P(X) sei definiert durch
(A, B) ∈ R5 ⇐⇒ A ⊂ B,
A, B ∈ Y = P(X).
Gilt z. B. X = {1, 2, 3, 4, 5}, so gilt
({1, 2}, {1, 2, 3}) ∈ R5 wegen {1, 2} ⊂ {1, 2, 3}
und
({1, 2}, {2, 3, 4}) ∈
/ R5 wegen {1, 2} * {2, 3, 4}.
In der folgenden Definition werden einige typische Eigenschaften zusammengestellt,
welche Relationen haben können.
Definition 2.2.6 (Eigenschaften von Relationen R ⊂ X × X).
Eine Relation R ⊂ X × X heißt
• reflexiv, falls für alle x ∈ X gilt
(x, x) ∈ R.
(man sagt: die Diagonale liegt in R.)
• transitiv, falls für alle x, y, z ∈ X gilt
aus (x, y) ∈ R und (y, z) ∈ R folgt (x, z) ∈ R.
• symmetrisch, falls für alle x, y ∈ X gilt
aus (x, y) ∈ R folgt stets (y, x) ∈ R.
• antisymmetrisch, falls für alle x, y ∈ X gilt
aus (x, y) ∈ R und (y, x) ∈ R folgt x = y.
• vollständig, falls für alle x, y ∈ X gilt
(x, y) ∈ R oder (y, x) ∈ R.
2.3. Äquivalenzrelationen
2.3
42
Äquivalenzrelationen
Definition 2.3.1 (Äquivalenzrelation).
Eine Relation R ⊆ X × X heißt eine Äquivalenzrelation auf der Menge X, falls
sie
• reflexiv ist, d.h. falls für alle x ∈ X gilt
(x, x) ∈ R,
• transitiv ist, d.h. falls für alle x, y, z ∈ X gilt
aus (x, y) ∈ R und (y, z) ∈ R folgt (x, z) ∈ R,
• und symmetrisch ist, d.h. falls für alle x, y ∈ X gilt
aus (x, y) ∈ R folgt (y, x) ∈ R.
In diesem Fall schreibt man anstatt (a, b) ∈ R: a ∼ b. Für spezielle Relationen (z. B.
die Gleichheit) gibt es eigene Notationen.
Beispiel 2.3.2.
Im folgenden Bild wird eine Äquivalenzrelation auf der Menge X = {1, 2, 3, 4, 5}
definiert.
b
6
5
c
s
c
c
s
4
s
c
c
s
c
3
c
c
s
c
c
2
c
s
c
c
s
1
s
c
c
s
c
1
2
3
4
5
-
a
Die Relation lautet
1 ∼ 1, 2 ∼ 2, 3 ∼ 3, 4 ∼ 4, 5 ∼ 5, 1 ∼ 4, 4 ∼ 1, 2 ∼ 5, 5 ∼ 2.
Definition 2.3.3.
Ist R ⊂ X × X eine Äquivalenzrelation auf der Menge X, so heißt für ein Element
x ∈ X die Menge
[x] = {y ∈ X | x ∼ y } = {y ∈ X | y ∼ x}
die Äquivalenzklasse von x.
2.3. Äquivalenzrelationen
43
Beachte:
Aus der Reflexivität folgt
x ∈ [x] für alle x ∈ X.
Definition 2.3.4.
Die Menge der Äquivalenzklassen
X / ∼ = {[x] | x ∈ X }
heißt die Faktormenge von X nach der Äquivalenzrelation
′′
∼′′ .
Beispiel 2.3.5.
Die Äquivalenzklassen im obige Beispiel lauten
[1] = [4] = {1, 4}, [2] = [5] = {2, 5}, [3] = {3}.
Man beachte, daß
und
gilt, also
X = {1, 2, 3, 4, 5} = [1] ∪ [2] ∪ [3]
[1] ∩ [2] = [1] ∩ [3] = [2] ∩ [3] = ∅
X = {1, 2, 3, 4, 5} = [1] + [2] + [3].
Die Faktormenge lautet damit
X / ∼ = {[1], [2], [3]}.
Satz 2.3.6.
Es seien X eine nichtleere Menge und R ⊂ X × X eine Äquivalenzrelation auf X.
Dann gelten für beliebige a, b ∈ X:
(i) a und b sind genau dann äquivalent, wenn [a] = [b] gilt, die Äquivalenzklasse
von a also mit der Äquivalenzklasse von b übereinstimmt;
(ii) die beiden Äquivalenzklassen [a] und [b] sind gleich, also [a] = [b], oder sie sind
disjunkt, also [a] ∩ [b] = ∅;
(iii) es gilt
X=
[
[a].
a∈X
Klasseneinteilung von Objekten kennt jeder aus dem Alltag. Schüler werden in Klassen eingeteilt, Obst und Gemüse werden in Handelsklassen eingeteilt. Der Begriff
einer Äquivalenzrelation ist nur das richtige mathematische Werkzeug, um derartige
Klasseneinteilungen mathematisch zu beschreiben.
2.4. Kongruenzen
44
Satz 2.3.7 (Klasseneinteilung, Vertretersysteme).
Jede Äquivalenzrelation bewirkt eine Klasseneinteilung auf der Mengen X, d.h.
eine disjunkte Aufteilung der Menge X in disjunkte Äquivalenzklassen. Wählt
man aus jeder Äquivalenzklasse Ki , i ∈ I, genau ein Element xi aus, so erhält man
ein vollständiges Vertretersystem der Äquivalenzklassen.
Disjunkte Aufteilung der Menge X
P
P
X=
Ki =
[xi ].
i∈I
i∈I
Satz 2.3.8 (Klasseneinteilung einer Menge).
Es sei X eine nichtleere Menge. Weiter seien I 6= ∅ eine nichtleere Indexmenge und
∅=
6 Ki , i ∈ I, nichtleere Teilmengen von X, und es gelte
Ki ∩ Kj = ∅,
und
X=
i, j ∈ I, i 6= j,
[
Ki .
i∈I
Eine derartige Darstellung der Menge X als Vereinigung von nichtleeren paarweise
disjunkten Teilmengen Ki ⊂ X, i ∈ I, nennt man eine Klasseneinteilung der
Menge X.
Für a, b ∈ X gelte
a ∼ b, falls es ein j ∈ I mit a, b ∈ Kj gibt.
Dann ist ∼ eine Äquivalenzrelation auf der Menge X mit Äquivalenzklassen Ki ,
i ∈ I.
2.4
Kongruenzen
Kongruenzen auf der Menge Z der ganzen Zahlen wurden schon im ersten Kapitel
eingeführt und ein wenig näher untersucht. In diesem Abschnitt werden jetzt die
Kongrenzrelationen als Äquivalenzrelationen auf der Menge Z betrachtet und die
zugehörigen Äquivalenzklassen, die sogenannten Kongruenzklassen, angegeben.
Definition 2.4.1 (Kongruenzrelationen in Z).
Es sei m ∈ Z eine ganze Zahl. Zwei Zahlen x, y ∈ Z heißen kongruent modulo m,
in Zeichen: x ≡ y (mod m), wenn x − y ein ganzzahliges Vielfaches von m ist, also
x ≡ y (mod m) ⇐⇒ m | (x − y).
2.4. Kongruenzen
45
Satz 2.4.2.
Durch x ≡ y (mod m) ist eine Äquivalenzrelation auf Z definiert, d.h., die Kongruenzrelation modulo m ist
• reflexiv, d.h. für alle x ∈ Z gilt
x ≡ x (mod m),
• symmetrisch, d.h. für alle x, y ∈ Z gilt
aus x ≡ y (mod m) folgt y ≡ x (mod m),
• transitiv, d.h. für alle x, y, z ∈ Z gilt
aus x ≡ y (mod m) und y ≡ z (mod m) folgt x ≡ z (mod m).
Bemerkungen 2.4.3.
1. Die Zahlen m und −m erzeugen dieselbe Kongruenzrelation, so dass wir uns
auf m ≥ 0 beschränken können.
2. Im Fall m = 0 ist die Kongruenzrelation modulo m dasselbe wie die Gleichheit, im Fall m = 1 sind je zwei ganze Zahlen mod m äquivalent (kongruent).
Damit können wir uns im Folgenden auf den Fall m ∈ N, m ≥ 2, beschränken.
3. Die Kongruenzrelation mod m erfüllt für x1 , x2 , y1, y2 ∈ Z die folgenden Rechenregeln:
(i) aus x1 ≡ y1 (mod m) und x2 ≡ y2 (mod m) folgt x1 ± x2 ≡ y1 ± y2 (mod
m),
(ii) aus x1 ≡ y1 (mod m) und x2 ≡ y2 (mod m) folgt x1 · x2 ≡ y1 · y2 (mod
m).
Dies bedeutet, dass man zwei Kongruenzen (mod m) addieren, subtrahieren
und multiplizieren darf.
Begründung zu 3.(ii)
Gilt x1 ≡ y1 ( mod m) und x2 ≡ y2 ( mod m), ist also m ein Teiler von (y1 −x1 )
und von (y2 − x2 ), so folgt
x1 · x2 − y1 · y2 = x1 · x2 − x1 · y2 + x1 · y2 − y1 · y2
= x1 · (x2 − y2 ) + (x1 − y1 ) ·y2
| {z } | {z }
m|
also
m|
≡ 0 (mod m),
x1 · x2 ≡ y1 · y2 (mod m).
2.4. Kongruenzen
46
4. Zwei ganze Zahlen x, y ∈ Z sind genau dann mod m kongruent, wenn sie
bei der Division durch m denselben Rest r ∈ {0, 1, . . . , m − 1} lassen. Die
Menge {0, 1, . . . , m − 1} stellt deshalb ein vollständiges Repräsentantensystem der Äquivalenzklassen (Kongruenzklassen) mod m dar. Ein derartiges vollständiges Repräsentantensystem mod m nennt man auch ein vollständiges Restsystem mod m. Ein anderes vollständiges Restsystem mod
m, das betragskleinste Restsystem mod m, erhält man durch
n
r∈Z:−
mo
m
<r≤+
.
2
2
Die Äquivalenzklassen (Kongruenzklassen) mod m werden auch Restklassen
mod m genannt, die Restklasse einer Zahl x ∈ Z wird mit
x = x (mod m) = x + mZ
bezeichnet. Es gilt
x = x + mZ = {x + m · z : z ∈ Z} = {a ∈ Z : a ≡ x (mod m)}.
Die Menge der Kongruenzklassen mod m bezeichnen wir mit
Z/mZ = 0, 1, . . . , m − 1 ,
insbesondere gibt es genau |Z/mZ| = m verschiedene Restklassen mod m.
Beachte
Es gilt
Z=
m−1
S
x=0
(x + mZ) =
m−1
P
(x + mZ),
x=0
dabei schreiben wir das Summenzeichen für eine disjunkte Vereinigung.
Beispiel 2.4.4.
Es sei m = 6. Vollständige Restsysteme sind z. B.
{0, 1, 2, 3, 4, 5}, das kleinste nichtnegative Restsystem mod 6,
oder
{−2, −1, 0, 1, 2, 3}, das betragskleinste Restsystem mod 6,
2.4. Kongruenzen
47
und es ergeben sich in diesem Fall die 6 Restklassen
0 = 0 + 6Z = {. . . , −12, −6, 0, 6, 12, . . .} = 6Z,
1 = 1 + 6Z = {. . . , −11, −5, 1, 7, 13, . . .},
2 = 2 + 6Z = {. . . , −10, −4, 2, 8, 14, . . .} ,
3 = 3 + 6Z = {. . . , −9, −3, 3, 9, 15, . . .} ,
4 = 4 + 6Z = {. . . , −8, −2, 4, 10, 16, . . .} ,
5 = 5 + 6Z = {. . . , −7, −1, 5, 11, 17, . . .},
z. B. gilt in Z/6Z = 0, 1, 2, 3, 4, 5
−1 = 5, 6 = 0, 16 = 4.
Beispiel 2.4.5.
n
Die Fermatzahlen Fn , n ∈ N0 , sind definiert durch Fn = 22 + 1. Der französische
Mathematiker, Jurist und Staatsmann Pierre de Fermat (1601 - 1665) behauptete,
dass diese Zahlen stets Primzahlen sind. Für die ersten 5 Fermatzahlen stimmt dies,
sie lauten
F0 = 3, F1 = 5, F2 = 17, F3 = 257, F4 = 65537.
Erst der schweizer Mathematiker Leonard Euler (1707 - 1783) konnte die Behauptung von Fermat widerlegen, er fand den Teiler 641 der sechsten Fermatzahl F5 =
232 + 1. Diese Aussage läßt sich mit Hilfe einfacher Kongruenzrechnung schnell wie
folgt nachrechnen.
641 = 640 + 1 =⇒ 640 = 27 · 5 ≡ −1 (mod 641)
=⇒ (27 · 5)4 = 228 · 625 ≡ +1 (mod 641), 625 = 641 − 16,
=⇒ 228 · 641 − 232 ≡ −232 ≡ 1 (mod 641)
=⇒ F5 = 232 + 1 ≡ 0 (mod 641),
also
5
641 | F5 = 22 + 1 = 232 + 1
= 4294967297 = 641 · 6700417.
Es sind bis heute keine weiteren Primzahlen unter den Fermatzahlen gefunden worden, und es ist unbekannt, ob es welche gibt.
2.5. Klassenbildung in der (deskriptiven) Statistik
2.5
48
Klassenbildung in der (deskriptiven) Statistik
Ein wesentlicher Aspekt der Wahrscheinlichkeitstheorie und Mathematischen Statistik ist die Modellierung zufallsabhängiger Phänomene und Vorgänge. Ein stochastischer Vorgang heißt ideales Zufallsexperiment, wenn
• das Experiment unter genau festgelegten Bedingungen, den sogenannten Versuchsbedingungen, durchgeführt wird,
• die Menge der möglichen Ergebnisse (Ausgänge) vor der Durchführung des
Experimentes bekannt ist,
• das Experiment (zumindest prinzipiell) beliebig oft unter gleichen Bedingungen wiederholt werden kann.
Beispiele für Zufallsexperimente
• das Werfen eines oder mehrerer Würfel oder Münzen,
• die Beobachtung der Anzahl von Jobs“, die an einem Prozessor innerhalb
”
eines festen Zeitraums von einer Minute ankommen,
• die Beobachtung von Lebensdauern von Geräten und elektrischen Schaltungen,
• die Beobachtung der Anzahl der Einsen in einer Folge von 32 zufälligen Binärzahlen.
Die bei einem Zufallsexperiment beobachtbaren Größen heißen Merkmale, die Werte, welche ein Merkmal annimmt, heißen Merkmalsausprägungen. Man unterscheidet zwischen den folgenden Typen von Merkmalen.
Qualitative Merkmale
• nominale Merkmale,
die Klassifizierung der Merkmalsausprägungen erfolgt nach rein qualitativen
Kriterien, z. B.: Blutgruppen beim Menschen, Prozessortyp, Geschlecht, etc.,
• ordinale Merkmale,
hier weisen die Merkmalsausprägungen eine natürliche Rangfolge auf, z. B.:
Schulnoten, Dienstgrade, etc.,
2.5. Klassenbildung in der (deskriptiven) Statistik
49
Quantitative Merkmale
• diskrete Merkmale,
die Merkmalsausprägungen sind isolierte Zahlwerte (sehr oft Anzahlen), z. B.:
Alter in Jahre von Geräten, Anzahl der Treffer bei einem Tipp im Lotto am
Samstag, Anzahl der Anforderungen eines Buches in einer Bibliothek innerhalb
eines Jahres, der pH-Wert in der Chemie, etc.,
• stetige Merkmale,
die Merkmalsausprägungen können (im Prinzip) jeden Wert in einem Intervall
annehmen, z. B.: Größe, Gewicht, Länge, Leistung, etc. .
Beachte
Der Übergang von diskreten zu stetigen Merkmalen ist fließend, z. B. ist der pHWert einer Flüssigkeit nach Definition ein diskretes Merkmal, aber in der Praxis
kann es als stetiges Merkmal betrachtet werden. (Stichwort Messgenauigkeit)
Definition 2.5.1.
Ein Zufallsexperiment werde n-mal durchgeführt. xi sei das beim i-ten Mal erhaltene
Ergebnis. Dann heißt
x = (x1 , . . . , xn )
Urliste oder Stichprobe vom Umfang n. Die Ergebnisse x1 , . . . , xn nennt man die
Daten.
Definition 2.5.2 (Empirische Häufigkeitsverteilung).
Es sei x = (x1 , . . . , xn ) eine Stichprobe vom Umfang n und a ein möglicher Merkmalswert.
• absolute Häufigkeiten
Hx (a) = # der xj mit xj = a
heißt die absolute Häufigkeit von a in der Stichprobe x.
Beachte
Sind a1 , . . . , ak die möglichen Merkmalswerte in der Stichprobe x = (x1 , . . . , xn ),
so gilt
Hx (a1 ) + . . . + Hx (ak ) =
k
X
Hx (aj ) = n.
j=1
• relative Häufigkeiten
hx (a) =
1
· Hx (a)
n
heißt die relative Häufigkeit von a in der Stichprobe x.
2.5. Klassenbildung in der (deskriptiven) Statistik
50
Beachte:
Sind a1 , . . . , ak die möglichen Merkmalswerte in der Stichprobe x = (x1 , . . . , xn ),
so gilt
hx (a1 ) + . . . + hx (ak ) =
k
X
hx (aj ) = 1.
j=1
• Indikatorfunktionen
Es seien X, Y zwei nichtleere Mengen und R ⊂ X × Y eine (binäre) Relation.
Dann definiert man
1, falls (x, y) ∈ R
1{xRy} =
.
0, falls (x, y) ∈
/R
Beispiele 2.5.3.
• Es seien X = Y = R und R =′′ ≤′′ . Dann gilt z. B.
1{2≤3} = 1 und 1{1≤−1} = 0.
• Es seien X = Y = R und R =′′ =′′ . Dann gilt z. B.
1{2=2} = 1 und 1{2=3} = 0.
• Es sei X = R und Y = P(R) = die Potenzmenge von R. Weiter sei R =′′ ∈′′ .
Dann gilt z. B.
1{2∈[0,4]} = 1 und 1{2∈[3,5]} = 0.
Beachte:
Mit dieser Notation gilt
• absolute Häufigkeit für a in der Stichprobe x = (x1 , . . . , xn )
Hx (a) =
n
X
1{xi =a} ,
i=1
• relative Häufigkeit für a in der Stichprobe x = (x1 , . . . , xn )
n
1 X
1{xi =a} .
hx (a) = ·
n i=1
2.5. Klassenbildung in der (deskriptiven) Statistik
51
Beispiel 2.5.4 (Stichprobe vom Umfang n = 20).
Bei 20 Jobs wurde die Bearbeitungsdauer (in sec) bestimmt, wobei sich folgende
Urliste ergab:
3.9
3.8
3.9
4.6
3.3
3.6
3.9
4.0
4.6
4.6
4.1
4.0
4.0
4.0
3.7
3.8
3.8
3.9
3.6
4.1
Der kleinste Wert beträgt: 3.3 sec, der größte Wert 4.6 sec, die Abstufung: 0.1 sec.
empirische Häufigkeitsverteilung
Wert
abs. H.
3.3
1
3.4
0
0
3.5
0
0
3.6
2
3.7
1
3.8
3
3.9
4
4.0
4
4.1
2
2
= 0.1
20
1
= 0.05
20
3
= 0.15
20
4
= 0.2
20
4
= 0.2
20
2
= 0.1
20
4.2
0
0
4.3
0
0
4.4
0
0
4.5
4.6
0
3
Definition 2.5.5.
Die Funktion Fx : R → [0, 1],
t → Fx (t) =
X
j:aj ≤t
P
1
20
3
20
= 20
hx (aj ) =
rel. H.
= 0.05
0
= 0.15
P
=1
#{i : xi ≤ t}
,
n
t ∈ R,
heißt empirische Verteilungsfunktion von x. Fx (t) ist der relative Anteil der
Stichprobenelemente, die kleiner oder gleich t sind.
2.5. Klassenbildung in der (deskriptiven) Statistik
52
Satz 2.5.6 (Eigenschaften der empirischen Verteilungsfunktion).
• Fx (t) ist eine monoton wachsende Treppenfunktion.
• Es gilt
lim Fx (t) = 0
t→−∞
und
lim Fx (t) = +1.
t→∞
• Fx (t) ist rechtsseitig stetig, d.h. für alle t0 ∈ R gilt
lim Fx (t) = Fx (t0 ).
t↓t0
Beispiel 2.5.7 (diskretes Merkmal).
Bei einer Produktion von Werkstücken werden n = 20 Proben zu je 15 Teilen entnommen und jeweils die Anzahl defekter Teile festgestellt. xi sei die Anzahl der
defekten Teile in der i-ten Probe.
x=( 0 4 2 1 1 0 0 2 3 1
0 5 3 1 1 2 0 0 1 0 ).
Es ergibt sich die folgende Häufigkeitstabelle.
aj
0
1
2
3
4
5
Hx (aj )
hx (aj )
Fx (aj )
7
0.35
0.35
6
0.30
0.65
3
0.15
0.80
2
0.10
0.90
1
0.05
0.95
1
0.05
1.00
Häufigkeitstabelle
hx (aj )
0.4
0.3
0.2
0.1
0
0
1
2
3
Stabdiagramm
4
5
aj
2.6. Klassenbildung, Histogramme
53
Fx (t)
1.0
0.8
hx (2)
0.6
hx (1)
0.4
0.2
0
0
2.6
1
2
3
Verteilungsfunktion Fx(t)
4
5
t
Klassenbildung, Histogramme
Es seien X ein quantitatives (stetiges) Merkmal und x = (x1 , . . . , xn ) eine Stichprobe
vom Umfang n. Um eine empirische Häufigkeitsverteilung zu erhalten, ergibt sich
das folgende Vorgehen.
1. Bestimme den kleinsten und den größten Stichprobenwert.
Schreibweise
x(1) = min{x1 , . . . , xn }
und
x(n) = max{x1 , . . . , xn }.
2. Man schreibe diese und alle anderen dazwischenliegenden Werte in der vorgeschriebenen Messgenauigkeit der Größe nach sortiert auf.
Beachte
Hierdurch ist das Merkmal X praktisch ein diskretes Merkmal!
3. Man fertige eine Strichliste und eine empirische Häufigkeitsverteilung an.
Nachteil:
Die empirische Häufigkeitsverteilung eines stetigen Merkmals kann sehr umfangreich
sein, vor allem können sehr viele Nullen auftreten durch Meßwerte, die in der Stichprobe nicht vorkommen. Daher führt man eine Klassenbildung zur Verringerung der
Datenmengen durch. Dies entspricht praktisch der Herabsetzung der Messgenauigkeit. Daher ist das Ziel: Datenreduktion durch Klassenbildung.
2.6. Klassenbildung, Histogramme
54
Definition 2.6.1 (Klassenbildung).
Klassen sind Intervalle der Form
(a, b] = {x ∈ R : a < x ≤ b}, a, b ∈ R ∪ {±∞}.
Empfehlungen zur Klassenbildung
1. Man bilde
x(1) = min{x1 , . . . , xn }
und
x(n) = max{x1 , . . . , xn },
teile das Intervall (x(1) − ε, x(n) + ε], ε > 0 klein, in etwa k gleichgroße
Teilintervalle ein.
2. Man vermeide zu kleine und zu große Klassen.
√
3. Grobe Empfehlung: bilde etwa k = n etwa gleichgroße Klassen, dabei bezeichne n = Stichprobenumfang.
Gezählt wird jetzt, wie häufig die Stichprobenwerte in die Klassen fallen.
Definition 2.6.2 (Histogramme).
Das Histogramm dient zur graphischen Darstellung quantitativer Daten, es zeigt
die relative Häufigkeit im Intervall (a, b] an. Das Darstellungsmittel ist die Fläche
eines Rechtecks mit Grundseite (a, b].
Vorgehen (allgemein)
Verwende eine Klasseneinteilung. Es sei (tj , tj+1] das Intervall für die j-te Klasse,
j = 1, . . . , k, dabei bezeichne k die Anzahl der Klassen. Weiter seien
Hj = # der Daten in (tj , tj+1 ] = absolute Klassenhäufigkeit,
j = 1, . . . , k.
Bilde
dj · (tj+1 − tj ) = hj =
Hj
= relative Klassenhäufigkeit,
n
j = 1, . . . , k.
Beachte
Es gilt
dj · (tj+1 − tj ) =
Flächeninhalt eines Rechteckes mit Grundseite (tj , tj+1 ] und Höhe dj .
Beachte
Die Gesamtfläche aller dieser Rechtecke ist gleich 1.
2.6. Klassenbildung, Histogramme
55
Beispiel 2.6.3 (stetiges Merkmal).
Bei 20 Jobs wurde die Bearbeitungsdauer (in sec) bestimmt, wobei sich folgende
Urliste ergab:
x=(
3.9
3.8
3.9
4.6
3.3
3.6
3.9
4.0
4.6
4.6
4.1
4.0
4.0
4.0
3.7
3.8
3.8
3.9
3.6
4.1 )
Der kleinste Wert beträgt: 3.3 sec, der größte Wert 4.6 sec, die Abstufung: 0.1 sec.
Empirische Häufigkeitsverteilung:
ai
Hx (ai )
hx (ai )
3.3 3.4
1
0
.05 0
3.5 3.6 3.7 3.8
0
2
1
3
0
.1 .05 .15
3.9
4
.2
ai
Hx (ai )
hx (ai )
4.0 4.1
4
2
.2 .1
4.2 4.3 4.4 4.5
0
0
0
0
0
0
0
0
4.6
3
.15
Klassenbildung: Klassen sind Intervalle der Form
(a, b] = {x ∈ R : a < x ≤ b}.
√
Grobe Empfehlung für Anzahl der Klassen: k ≈ n.
Klasse
Klasse
Klasse
Klasse
Klasse
1:
2:
3:
4:
(3.25,
(3.65,
(3.95,
(4.25,
3.65]
3.95]
4.25]
4.65]
3.3
”
3.7
”
4.0
”
4.3
”
—
—
—
—
3.6“
3.9“
4.2“
4.6“
j
1
2
3
4
Häufigkeit
absolut relativ
Hj
hj
3
0.15
8
0.4
6
0.3
3
0.15
2.7. Statistische Maßzahlen
2.7
56
Statistische Maßzahlen
Definition 2.7.1 (Kenngrößen).
Gegeben sei die Stichprobe x = (x1 , . . . , xn ) vom Umfang n mit Werten in R. Dann
definiert man
x̄
n
x1 + . . . + xn
1 X
= ·
xi =
n i=1
n
das Stichproben-Mittel,
s2x
n
X
1
(x1 − x̄)2 + . . . + (xn − x̄)2
=
·
(xi − x̄)2 =
n − 1 i=1
n−1
die Stichproben-Varianz, wobei n ≥ 2
p
sx = + s2x
die Stichproben-Standardabweichung und
sx
x̄
für den Fall x1 , . . . , xn > 0, genannt der Stichproben-Variationskoeffizient.
vx
=
Beispiel 2.7.2.
Vorgelegt sie die folgende Stichprobe x = (x1 , . . . , x20 ) vom Umfang n = 20 (z. B.:
Studiendauer gemessen in Anzahl von Semestern)
10 11 9 7 9 11
11 9 10 12 13 12
22 12 13 9
11 10 10 12
Es gilt
20
X
xj = 223,
j=1
also
1
· 223 = 11.15.
20
Problem: das arithmetische Mittel reagiert ziemlich stark auf ”Ausreißerdaten”, so
ergibt sich z. B., falls der größte Wert 22 gestrichen wird
1
· 201 ≈ 10.58.
19
x=
2.7. Statistische Maßzahlen
57
Bemerkung 2.7.3 (Formel zur Berechnung von s2x ).
Es gilt
)
( n
n
X
X
1
1
s2x =
·
(xi − x)2 =
·
x2i − n · x2 ,
n − 1 i=1
n−1
i=1
Beispiel 2.7.4 (Fortsetzung des obigen Beispiels).
Für die Stichprobenvarianz im obigen Beispiel ergibt sich
20
X
x2i = 2655,
i=1
also
1 · 2655 − 20 · 11.152
19
1
· 168.55 ≈ 8.8711,
=
19
s2x =
damit lautet die Standardabweichung im obigen Beispiel
p
sx = + s2x ≈ 2.9784.
Auch s2x reagiert sehr empfindlich auf ”Ausreißerdaten”, ohne den Wert 22 ergibt
sich
1
· {2171 − 19 · 10.582 } ≈ 2.48.
18
Definition 2.7.5 (Empirischer Median).
Gegeben sei die Stichprobe x = (x1 , . . . , xn ) vom Umfang n, n ∈ N.
• Die aus den aufsteigend sortierten Elementen x(1) ≤ x(2) ≤ . . . ≤ x(n) von
x1 , . . . , xn bestehende Stichprobe
x() = (x(1) , x(2) , . . . , x(n) )
heißt die geordnete Stichprobe (zu x).
• Die Größe
x̃ =
(
x( n+1 )
, falls n ungerade
2
1
· x( n ) + x( n +1) , falls n gerade
2
2
2
heißt der Stichproben-Median (Zentralwert) von x.
2.7. Statistische Maßzahlen
58
Beispiele 2.7.6.
• Die geordnete Stichprobe x() zur Stichprobe x = (3, 2, 2, 1) lautet
x() = (1, 2, 2, 3).
Damit ergibt sich der Median zur Stichprobe x zu
x̃ =
1
· (2 + 2) = 2.
2
• Die geordnete Stichprobe x() zur Stichprobe x = (5, 3, 3, 1, 2) lautet
x() = (1, 2, 3, 3, 5).
Damit ergibt sich der Median zur Stichprobe x zu
x̃ = x(3) = 3.
Bemerkungen 2.7.7 (zum Median).
1. Der (empirische) Median ist unempfindlich gegenüber ”Ausreißerdaten”, man
nennt diese Eigenschaft Robustheit.
2. Etwa die Hälfte der Daten sind ”≤” und etwa die Hälfte der Daten sind ”≥”
x
e.
Beispiel 2.7.8.
Vorgelegt sie die folgende Stichprobe x = (x1 , . . . , x20 ) vom Umfang n = 20 (z. B.:
Studiendauer gemessen in Anzahl von Semestern).
10 11 9 7 9 11
11 9 10 12 13 12
22 12 13 9
11 10 10 12
Die zugehörige geordnete Stichprobe x( ) = (x(1) , x(2) , . . . , x(20) ) lautet
7 9 9 9 9 10
11 11 11 12 12 12
10 10 10 11
12 13 13 22
Als empirischer Median ergibt sich, da n = 20 gerade ist
1
x
e = · (x(10) + x(11) ) = 11.
2
Definition 2.7.9 (Vergl. Floor-Fkt. in der Einheit ”Sprechweise der Stochastik”).
⌊y⌋ = max{k ∈ Z : k ≤ y}
ist die größte ganze Zahl, welche kleiner oder gleich einer reellen Zahl y ist, also
z. B. ⌊1.2⌋ = 1, ⌊−0.3⌋ = −1, ⌊5⌋ = 5.
2.8. Ordnungsrelationen
59
Definition 2.7.10 (α-getrimmte Mittel).
Sei α ∈ [0, 0.5) und k = ⌊n · α⌋. Dann heißt
x̄α =
1
· (x(k+1) + . . . + x(n−k) )
n−2·k
das α-getrimmte (gestutzte) Stichproben-Mittel. Insbesondere ist x̄ = x̄0 .
Beispiel 2.7.11 (Beispiel zum α-gestutzten Mittel).
Vorgelegt sie die folgende Stichprobe x = (x1 , . . . , x20 ) vom Umfang n = 20 (z. B.:
Studiendauer gemessen in Anzahl von Semestern).
10 11 9 7 9 11
11 9 10 12 13 12
22 12 13 9
11 10 10 12
Die zugehörige geordnete Stichprobe x( ) = (x(1) , x(2) , . . . , x(20) ) lautet
7 9 9 9 9 10
11 11 11 12 12 12
10 10 10 11
12 13 13 22
Es sei
α = 0.12, k = ⌊20 · 0.12⌋ = ⌊2.4⌋ = 2,
dann gilt
x0.12 =
2.8
1
1
· (223 − 16 − 35) =
· 172 = 10.75.
16
16
Ordnungsrelationen
Definition 2.8.1.
Eine Relation R ⊂ X × X heißt Ordnungsrelation auf der Menge X, falls sie
• reflexiv ist, d.h. falls für alle x ∈ X gilt
(x, x) ∈ R,
• transitiv ist, d.h. falls für alle x, y, z ∈ X gilt
aus (x, y) ∈ R und (y, z) ∈ R folgt (x, z) ∈ R,
• antisymmetrisch ist, d.h. falls für alle x, y ∈ X gilt
aus (x, y) ∈ R und (y, x) ∈ R folgt x = y.
In diesem Fall schreibt man anstatt (a, b) ∈ R
a ≤ b.
2.8. Ordnungsrelationen
60
Definition 2.8.2.
Eine Ordnungsrelation R ⊂ X × X heißt vollständig oder eine Totalordnung,
falls sie
• vollständig ist, d.h. falls für alle x, y ∈ X gilt
(x, y) ∈ R oder (y, x) ∈ R.
Beispiele 2.8.3.
1. Auf den Mengen X = N bzw. N0 , Z, Q, R ist durch die natürliche Ordnung
a ≤ b :⇐⇒ b − a ist nicht negativ, a, b ∈ X,
eine Totalordnung definiert.
2. Auf der Mengen X = N der natürlichen Zahlen ist durch
n m :⇐⇒ n | m (sprich: n teilt m oder n ist ein Teiler von m)
eine Ordungsrelation definiert. Diese Ordungsrelation auf der Menge der natürlichen Zahlen ist aber keine Totalordnung, denn z. B. sind die Zahlen 5 und 6
bzgl. der Teilbarkeit nicht miteinander vergleichbar.
3. Es sei X eine nichtleere Menge, welche durch die Relation ≤ geordnet ist.
Dann wird durch
(x1 , x2 , . . . , xn ) ≤ (y1 , y2, . . . , yn )
x1 < y1
oder
x1 = y1 ∧ x2 < y2
oder x1 = y1 ∧ x2 = y2 und x3 < y3
:⇐⇒
oder
..
.
oder x = y ∧ . . . ∧ x
1
1
n−1 = yn−1 ∧ xn < yn
eine Ordnungsrelation auf dem n−fachen kartesischen Produkt X n definiert.
Diese Ordnungsrelation nennt man die lexikografische Ordnung auf der
Menge X n . Ist die Menge X durch ≤ sogar totalgeordnet, so ist auch die
lexikografische Ordnung auf der Menge X n eine Totalordnung. Die lexikografische Ordnung kennt jeder von Karteikartensystemen z. B. in Bibliotheken.
Alle Bücher werden (innerhalb einer Fachgruppe) nach Verfassernamen sortiert
2.8. Ordnungsrelationen
61
aufgestellt, zuerst die Verfasser, deren Namen mit dem Buchstaben a beginnen, dann diejenigen, deren Namen mit dem Buchstaben b beginnen, usw.. Die
Menge X ist hier also das Alphabet, die Totalordnung auf X die natürliche
Reihenfolge der Buchstaben im Alphabet. Stimmen die Anfangsbuchstaben
von zwei Verfassern überein, so entscheidet der zweite Buchstabe des Verfassernamens über die Einsortierung der Bücher. Fährt man so fort, bekommt
jedes Buch einen Platz im Regal und kann anhand der Kartei schnell wieder
aufgefunden werden. Es ist hierbei zu beachten, dass sich in diesem Beispiel
trotzdem keine Totalordnung auf der Menge der Bücher ergibt, da z. B. viele
Bücher in mehreren Exemplaren vorhanden sind. Um eine Totalordnung zu
erreichen, könnte man z. B. die Inventarnummern heranziehen.
Definition 2.8.4 (Präferenzrelation).
Es sei X eine nichtleere Menge. Eine Relation R ⊂ X × X heißt eine Präferenzrelation auf X, falls sie
• reflexiv ist, d.h. falls für alle x ∈ X gilt
(x, x) ∈ R,
• transitiv ist, d.h. falls für alle x, y, z ∈ X gilt
aus (x, y) ∈ R und (y, z) ∈ R folgt (x, z) ∈ R,
• vollständig ist, d.h. falls für alle x, y ∈ X gilt
(x, y) ∈ R oder (y, x) ∈ R.
In diesem Fall schreibt man a b und sagt: a ist höchstens so gut wie b, oder b ist
mindestens so gut wie a.
Beispiel 2.8.5.
Es sei X = {a, b, c, d, e}. Dann wird durch
• a b, a ist höchstens so gut wie b,
• b c, b ist höchstens so gut wie c,
• c d, d c, c und d sind gleich gut,
• e a, e ist höchstens so gut wie a,
eine Präferenzrelation auf der Menge X erzeugt. Man beachte, dass die Forderung
der Reflexivität zu den Beziehungen
a a, b b, c c, d d, e e
2.8. Ordnungsrelationen
62
und die Forderung der Transitivität zu den Forderungen
a c, a d, b d, e b, e c, e d
führt. Die Relation ist in dem folgenden Bild dargestellt.
X
6
e
e
e
e
e
u
d
u
u
u
u
u
c
u
u
u
u
u
b
u
u
e
e
u
a
u
e
e
e
u
-
a
c
b
d
e
X
Zum Abschluss wird noch eine Aufgabe zum Thema Relationen, welche vor vielen
Jahren in einer Klausur gestellt wurde, behandelt.
Aufgabe (alte Klausuraufgabe)
Es sei X die Menge aller in Karlsruhe gemeldeten Personen. Auf der Menge X
werden die beiden folgenden Relationen definiert:
(1) xR1 y :⇐⇒ x hat den gleichen Vater wie y;
(2) xR2 y :⇐⇒ x ist Tochter von y.
Untersuchen Sie diese beiden Relationen auf Reflexivität, Symmetrie, Antisymmetrie und Transitivität.
Lösung:
R1 ist
R2 ist
reflexiv
ja
nein
symmetrisch
×
×
×
ja
nein
×
antisymmetrisch
ja
×
transitiv
nein
ja
×
×
nein
×
Kapitel 3
Polynome
3.1
Das Rechnen mit Polynomen
Polynome, genauer Polynomfunktionen, in einer Variablen bilden die ”einfachste”
große Klasse von Funktionen, deren Graphen schon in der Schule im Rahmen der
Differentialrechnung (Stichwort: Kurvendiskussion) näher untersucht werden. Polynome spielen eine zentrale Rolle in vielen Zweigen der Mathematik.
Definition 3.1.1.
Vorgegeben seien eine natürliche Zahl n ∈ N0 und reelle Zahlen a0 , a1 , a2 , . . . , an−1 ,
an ∈ R. Ein (reelles) Polynom (in einer Variablen) f (X) über den reellen Zahlen
ist ein Rechenausdruck der Form
f (X) = a0 + a1 · X + a2 · X 2 + . . . + an−1 · X n−1 + an · X n .
Die Zahlen a0 , a1 , a2 , . . . , an−1 , an ∈ R heißen die Koeffizienten des Polynoms f .
Gilt an 6= 0, so nennt man n den Grad des Polynoms f und schreibt
grad(f ) = deg(f ) = n.
Dem Nullpolynom g = 0 wird der Grad −∞ zugewiesen. Manche Autoren weisen
dem Nullpolynom keinen Grad zu.
Mit Hilfe der Summennotation läßt sich ein Polynom in der handlicheren Form
n
P
f (X) =
ak · X k = a0 + a1 · X + a2 · X 2 + . . . + an−1 · X n−1 + an · X n
k=0
schreiben. Die Menge aller reellen Polynome in der Variablen X wird mit R[X]
bezeichnet, also
n
P
R[X] = { ak · X k : a0 , a1 , a2 , . . . , an−1 , an ∈ R, n ∈ N0 }.
k=0
Beachte:
Die Menge R der reellen Zahlen ist eine Teilmenge der Menge aller reellen Polynome: R ⊂ R[X]. Eine reelle Zahl, aufgefasst als Polynom, nennt man auch eine
Konstante.
63
3.1. Das Rechnen mit Polynomen
64
Definition 3.1.2.
Es sei
n
P
f (X) =
ak · X k = a0 + a1 · X + a2 · X 2 + . . . + an−1 · X n−1 + an · X n ∈ R[X]
k=0
ein reelles Polynom. Dann wird durch f eine Funktion, die zugehörige Polynomfunktion, welche wieder mit dem Buchstaben f bezeichnet wird, definiert
R → R,
n
P
f:
ak · xk .
x 7→ f (x) =
k=0
Die Polynomfunktion f entsteht aus dem Polynom f (X), indem in dem Rechenausdruck f (X) ∈ R[X] für die Variable X beliebige reelle Zahlen x ∈ R eingesetzt
werden.
Beachte:
Es muss zunächst sauber getrennt werden zwischen den beiden Begriffen Polynom
und Polynomfunktion, denn es ist zu diesem Zeitpunkt nicht klar, ob zwei verschiedene Polynome (Rechenausdrücke) zu derselben Polynomfunktion führen können.
Wir werden sehen, dass dies für reelle Polynome nicht eintritt, so dass wir später im
Bereich der reellen Analysis (Differential- und Integralrechnung) nur von Polynomen
reden werden, aber stets Polynomfunktionen meinen. In anderen Teilen der Mathematik (z.B. in der Codierungstheorie), in denen Polynome als Rechenausdrücke über
anderen Rechenbereiche betrachtet werden, kann dies aber zu Fehlern führen. Wir
werden uns in diesem Kapitel ausschließlich auf Polynome über dem Rechenbereich
der reellen Zahlen beschränken.
Definition 3.1.3 (Addition in R[X]).
Auf der Menge R[X] aller Polynome läßt sich eine Addition
+ : R[X] × R[X] → R[X], (f, g) 7→ f + g,
definieren. Sind
f (X) = a0 + a1 · X + a2 · X 2 + . . . + an−1 · X n−1 + an · X n ∈ R[X]
und
g(X) = b0 + b1 · X + b2 · X 2 + . . . + bm−1 · X m−1 + bm · X m ∈ R[X]
zwei reelle Polynome und gilt m ≤ n, so ist die Summe f + g definiert durch
(f + g)(X) = (a0 + b0 ) + (a1 + b1 ) · X + (a2 + b2 ) · X 2 + . . . + (am−1 + bm−1 ) · X m−1
+(am + bm ) · X m + am+1 · X m+1 + . . . + an · X n .
3.1. Das Rechnen mit Polynomen
65
Beachte
Setzt man
bk = 0 für k = m + 1, m + 2, . . . , n,
so läßt sich die Addition von f und g in Summenschreibweise übersichtlicher schreiben in der Form
n
m
n
n
n
P
P
P
P
P
(f + g)(X) =
ak · X k +
bk · X k =
ak · X k +
bk · X k =
(ak + bk ) · X k .
k=0
k=0
k=0
k=0
k=0
Beachte
Die Polynomfunktion, welche zur Summe f + g gehört, ist dann definiert durch
R → R,
n
m
P
P
f +g :
ak · xk +
bk · xk .
x 7→ (f + g)(x) = f (x) + g(x) =
k=0
k=0
Beispiel 3.1.4.
Die Summe der beiden Polynome
f (X) = 3 · X 4 − X 3 + 5 · X + 1
und
g(X) = −3 · X 4 + 2 · X 2 − 3 · X + 2
lautet
f (X) + g(X) = −X 3 + 2 · X 2 + 2 · X + 3.
Bemerkung 3.1.5.
Sind f, g ∈ R[X] zwei (reelle) Polynome, so gilt
grad(f + g) ≤ max (grad(f ), grad(g)).
Bemerkungen 3.1.6 (Rechengesetze für die Addition).
Für die Addition von Polynomen gelten die folgenden Rechenregeln.
• Das Assoziativgesetz der Addition
Für alle f, g, h ∈ R[X] gilt
(f + g) + h = f + (g + h),
dies bedeutet, dass man die Addition mehrerer Polynome klammerfrei notieren
kann.
• Das Kommutativgesetz der Addition
Für alle f, g ∈ R[X] gilt
f + g = g + f,
dies bedeutet, dass die Reihenfolge der Summanden bei einer Addition von
Polynomen gleichgültig ist.
3.1. Das Rechnen mit Polynomen
66
• Die Existenz eines neutralen Elements (bzgl. der Addition): 0 = Null
(Nullpolynom),
0 + f = f + 0 für alle f ∈ R[X].
Beachte:
Die zum Nullpolynom gehörende Polynomfunktion ist die Funktion konstant
gleich 0, also die Funktion
0 : R → R, x 7→ 0(x) = 0.
• Es gibt eine Inversenbildung bzgl. der Addition (Einführung der Subtraktion), d.h. zu jedem Polynom f ∈ R[X] gibt es ein Polynom (−f ) ∈ R[X]
mit
f − f = f + (−f ) = (−f ) + f = 0.
Beachte:
Ist das Polynom f ∈ R[X] gegeben durch
f (X) = a0 +a1 ·X+a2 ·X 2 +. . .+an−1 ·X n−1 +an ·X n , a0 , a1 , a2 , . . . , an−1 , an ∈ R,
so gilt für das zu f additiv inverse Polynom (−f ) ∈ R[x]
(−f )(X) = −f (X) = −a0 − a1 · X − a2 · X 2 − . . . − an−1 · X n−1 − an · X n .
Definition 3.1.7 (Multiplikation in R[X]).
Es seien
f (X) = a0 + a1 · X + a2 · X 2 + . . .+ an−1 · X n−1 + an · X n =
und
g(X) = b0 +b1 ·X +b2 ·X 2 +. . .+bm−1 ·X m−1 +bm ·X m =
n
P
i=0
m
P
j=0
ai · X i ∈ R[X], n ∈ N0 ,
bj ·X j ∈ R[X], m ∈ N0 .
Dann ist das Produkt f · g ∈ R[X] definiert durch
!
n
n+m
m
P
P
P
ck · X k
bj · X j =
(f · g)(X) = f (X) · g(X) =
ai · X i ·
j=0
i=0
mit
ck =
P
i+j=k
k=0
ai · bj ,
wobei in der letzten Summe zu summieren ist über alle Paare (i, j) ∈ {1, 2, . . . , n} ×
{1, 2, . . . , m} mit i + j = k.
3.1. Das Rechnen mit Polynomen
67
Beachte
Das Produkt entsteht, wenn man den Rechenausdruck f (X) · g(X) distributiv ausmultipliziert. Dieses ist im Folgenden exemplarisch für die beiden Polynome
f (X) = a4 · X 4 + a3 · X 3 + a2 · X 2 + a1 · X + a0
und
g(X) = b3 · X 3 + b2 · X 2 + b1 · X + b0
durchgeführt. Es gilt
(f · g)(X) = f (X) · g(X)
= a4 · X 4 + a3 · X 3 + a2 · X 2 + a1 · X + a0 · b3 · X 3 + b2 · X 2 + b1 · X + b0
= (a4 · b3 ) · X 7
+ (a4 · b2 + a3 · b3 ) · X 6
+ (a4 · b1 + a3 · b2 + a2 · b3 ) · X 5
+ (a4 · b0 + a3 · b1 + a2 · b2 + a1 · b3 ) · X 4
+ (a3 · b0 + a2 · b1 + a1 · b2 + a0 · b3 ) · X 3
+ (a2 · b0 + a1 · b1 + a0 · b2 ) · X 2
+ (a1 · b0 + a0 · b1 ) · X
+ (a0 · b0 ) .
Setzt man
ai = 0 für alle i > n
und
bj = 0 für alle j > m,
so lassen sich die Koeffizienten ck , 0 ≤ k ≤ n + m, welche sich bei der Multiplikation
der beiden Polynome
f (X) =
n
P
ai · X i
m
P
bj · X j
i=0
und
g(X) =
j=0
ergeben, übersichtlicher schreiben in der Form
ck =
k
P
i=0
ai · bk−i ,
k = 0, 1, 2, . . . , n + m.
Man beachte die Gültigkeit von
ck =
k
P
i=0
ai · bk−i =
k
P
j=0
ak−j · bj ,
0 ≤ k ≤ n + m.
3.1. Das Rechnen mit Polynomen
68
Für die beiden Polynome
f (X) = a4 · X 4 + a3 · X 3 + a2 · X 2 + a1 · X + a0
und
g(X) = b3 · X 3 + b2 · X 2 + b1 · X + b0
ist dies im Folgenden wieder exemplarisch durchgeführt.
(f · g)(X) = f (X) · g(X)
= a4 · X 4 + a3 · X 3 + a2 · X 2 + a1 · X + a0 · b3 · X 3 + b2 · X 2 + b1 · X + b0
= a7 ·b0 + a6 ·b1 + a5 ·b2 + a4 · b3 + a3 · b4 +a2 · b5 +a1 · b6 +a0 · b7 ·X 7
|{z}
|{z}
|{z}
|{z}
|{z}
|{z}
|{z}
=0
=0
=0
=0
=0
=0
| =0
{z
}
=c7
+ a6 ·b0 + a5 ·b1 + a4 · b2 + a3 · b3 + a2 · b4 +a1 · b5 +a0 · b6 ·X 6
|{z}
|{z}
|{z}
|{z}
|{z}
=0
=0
=0
=0
=0
|
{z
}
=c6
+ a5 ·b0 + a4 · b1 + a3 · b2 + a2 · b3 + a1 · b4 +a0 · b5 ·X 5
|{z}
|{z}
|{z}
=0
=0
=0
|
{z
}
=c5
+ a4 · b0 + a3 · b1 + a2 · b2 + a1 · b3 + a0 · b4 ·X 4
|{z}
=0
|
{z
}
=c4
+ (a3 · b0 + a2 · b1 + a1 · b2 + a0 · b3 ) ·X 3
|
{z
}
=c3
+ (a2 · b0 + a1 · b1 + a0 · b2 ) ·X 2
|
{z
}
=c2
+ (a1 · b0 + a0 · b1 ) ·X
|
{z
}
=c1
+ (a0 · b0 )
| {z }
=c0
7
= c7 · X + c6 · X 6 + c5 · X 5 + c4 · X 4 + c3 · X 3 + c2 · X 2 + c1 · X + c0
=
7
X
k=0
ck · X k .
3.1. Das Rechnen mit Polynomen
69
Bemerkung 3.1.8.
Sind f, g ∈ R[X] zwei (reelle) Polynome, so gilt
grad(f · g) = grad(f ) + grad(g).
Beispiel 3.1.9.
Das Produkt der beiden Polynome
f (X) = 2 · X 3 − x + 3
und
g(X) = X 4 + 3 · X 3 − X 2 − 1
lautet
f · g(X) = f (X) · g(X) = 2 · X 3 − X + 3 · X 4 + 3 · X 3 − X 2 − 1
= 2 · X7 + 6 · X6 − 2 · X5 − 2 · X3 − X5 − 3 · X4 + X3 + X
+ 3 · X4 + 9 · X3 − 3 · X2 − 3
= 2 · X 7 + 6 · X 6 − 3 · X 5 + 8 · X 3 − 3 · X 2 + X − 3.
Bemerkungen 3.1.10.
Für die Multiplikation von Polynomen
· : R[X] × R[X] → R[X], (f, g) 7→ f · g,
gelten die folgenden Rechengesetze.
• Das Assoziativgesetz der Multiplikation
Für alle f, g, h ∈ R[X] gilt
(f · g) · h = f · (g · h),
dies bedeutet, dass man die Multiplikation mehrerer Polynome klammerfrei
notieren kann.
• Das Kommutativgesetz der Multiplikation
Für alle f, g ∈ R[X] gilt
f · g = g · f,
dies bedeutet, dass die Reihenfolge der Faktoren bei einer Multiplikation von
Polynomen gleichgültig ist.
• Die Existenz eines neutralen Elements (bzgl. der Multiplikation): 1 =
Eins (jetzt aufgefasst als Polynom),
1 · f = f · 1 = f für alle f ∈ R[X].
3.2. Teilbarkeit im Polynomring
70
Bemerkungen 3.1.11 (Distributivgesetze).
Die Verbindung zwischen der Addition und der Multiplikation von Polynomen wird
wieder hergestellt durch die beiden Distributivgesetze
• erstes Distributivgesetz
f · (g + h) = f · g + f · h für alle f, g, h ∈ R[X]
und
• zweites Distributivgesetz
(f + g) · h = f · h + g · h für alle f, g, h ∈ R[X].
Beachte
Die oben aufgeführten Rechengesetze für Polynome sind auch richtig im Bereich
der zugehörigen Polynomfunktionen. Dabei ist die Addition von zwei reellwertigen
Abbildungen f und g definiert durch
f + g : R → R, x 7→ (f + g)(x) = f (x) + g(x),
und die Multiplikation durch
f · g : R → R, x 7→ (f · g)(x) = f (x) · g(x).
Beachte
Aus dem bisher Gesagten folgt, dass wie die Menge Z der ganzen Zahlen auch die
Menge der (reellen) Polynome in einer Variablen, versehen mit den oben definierten
Addition und Multiplikation einen kommutativen Ring mit Eins bildet, den Polynomring R[X] in einer Variablen X über dem Konstantenbereich R. Dieser Ring
ist wieder nullteilerfrei, denn für f, g ∈ R[X] gilt
aus f · g = 0 folgt f = 0 oder g = 0.
Das Tripel (R[X], +, ·) bildet also genauso wie der Ring Z der ganzen Zahlen einen
Integritätsbereich.
3.2
Teilbarkeit im Polynomring
Wie im Integritätsbereich Z gilt auch im Polynomring R[X] ein Satz von der Division
mit Rest.
Satz 3.2.1.
Es seien f (X), g(X) ∈ R[X] zwei Polynome, und es gelte g(X) 6= 0 (gemeint ist
hier, dass das Polynom g verschieden vom Nullpolynom sein soll!). Dann gibt es
eindeutig bestimmte Polynome q(X), r(X) ∈ R[X] mit
f (X) = q(X) · g(X) + r(X) und 0 ≤ grad(r(X)) < grad(g(X)) oder r(X) = 0.
3.2. Teilbarkeit im Polynomring
71
Bemerkung 3.2.2 (Teilbarkeit).
Gilt bei der obigen Division r(X) = 0, also
f (X) = q(X) · g(X),
so sagt man, dass das Polynom g(X) ein Teiler des Polynoms f (X) ist, oder dass
das Polynom f (X) durch das Polynom g(X) teilbar ist. Sind f (X), g(X) ∈ R[X]
zwei Polynome, so schreibt man wieder
g(X) | f (X), falls es ein Polynom q(X) ∈ R[X] gibt mit f (X) = q(X) · g(X).
Die Eigenschaften der Teilbarkeitsbeziehung, welche wir schon im Integritätsbereich
Z notiert haben, bleiben auch im Polynomring R[X] erhalten. Wir verzichten darauf, diese an dieser Stelle nochmals aufzuführen.
Um für vorgegebene Polynome f (X), g(X) ∈ R[X], g(X) 6= 0, die Polynome
q(X), r(X) ∈ R[X] gemäß dem Satz von der Division mit Rest zu bestimmen, wird
der aus der Schule bekannte Divisionsalgorithmus für Polynome durchgeführt. Dieser
wird im folgenden Beispiel exemplarisch vorgeführt.
Beispiel 3.2.3.
Es seien
f (X) = 2 · X 4 + 3 · X 3 + X 2 − 2 · x + 1 und g(X) = X 2 − X + 3.
Polynomdivision ergibt
2 · X4
2 · X4
+
−
3 · X3
2 · X3
5 · X3
5 · X3
+
+
−
−
X2
6 · X2
5 · X2
5 · X2
−
2·X
+
1
−
+
−
2·X
15 · X
17 · X
+
1
+
1
:
X2 − X + 3
=
2 · X2 + 5 · X
Folglich gilt
f (X) = (2 · X 2 + 5 · X) ·g(X) + (−17 · X + 1).
|
{z
}
|
{z
}
=q(X)
=r(X)
Der Satz von der Division mit Rest im Polynomring hat eine wichtige Konsequenz,
welche im folgenden Satz formuliert ist.
Satz 3.2.4 (Division mit Rest im Polynomring).
Es sei f (X) ∈ R[X], f (X) 6= 0, ein von 0 verschiedenes Polynom. Dann besitzt die
zugehörige Polynomfunktion f (x) genau dann eine Nullstelle an der Stelle a ∈ R,
falls es ein Polynom q(X) ∈ R[X] gibt mit
f (X) = q(X) · (X − a),
falls also das Polynom f (X) durch das lineare Polynom (X − a) teilbar ist.
3.2. Teilbarkeit im Polynomring
72
Beweis:
Gilt
f (X) = q(X) · (X − a)
für ein Polynom q(X) ∈ R[X], so erhält man durch einsetzen sofort
f (a) = q(a) · (a − a) = q(a) · 0 = 0.
Es sei jetzt umgekehrt a ∈ R eine Nullstelle des Polynoms f (X) (genauer der zugehörigen Polynomfunktion). Division mit Rest ergibt
f (X) = q(X) · (X − a) + r(X)
mit
q(X), r(X) ∈ R[X] und 0 ≤ grad(r(X)) < 1 oder r(X) = 0.
Es folgt
f (X) = q(X) · (X − a) + r mit q(X) ∈ R[X] und r ∈ R.
Einsetzen von a ergibt
0 = f (a) = q(a) · (a − a) + r = q(a) · 0 + r = r,
also
f (X) = q(X) · (X − a),
was zu beweisen war.
Folgerung 3.2.5.
Ist f (X) ∈ R[X] ein Polynom vom Grad n ∈ N, so besitzt f (X) höchstens n verschiedene Nullstellen.
Beispiel 3.2.6.
Wie man leicht nachrechnet, besitzt das Polynom
f (X) = X 4 + X 3 − 5 · X 2 + X − 6 ∈ R[X]
die Nullstelle x1 = 2. Polynomdivision ergibt
f (X) = g(X) · (X − 2) mit g(X) = X 3 + 3 · X 2 + X + 3.
Das Polynom g(X) ∈ R[X] besitzt die Nullstelle x2 = −3. Eine weitere Polynomdivision ergibt
g(X) = (X 2 + 1) · (X + 3).
3.2. Teilbarkeit im Polynomring
73
Insgesamt folgt
f (X) = X 4 + X 3 − 5 · X 2 + X − 6 = (X − 2) · (X + 3) · (X 2 + 1),
das Polynom f (X) besitzt also zwei Nullstellen: x1 = 2 und x2 = −3. Unten sehen
Sie ein Schaubild des Graphen der zugehörigen Polynomfunktion
f : R → R, x 7→ f (x) = x4 + x3 − 5 · x2 + x − 6.
200
150
Y
100
50
–4
–3
–2
–1
0
1
2
3
4
X
Schaubild der Graphen der Funktion f (x) = x4 + x3 − 5 · x2 + x − 6 für x ∈ [−4, 4].
Folgerung 3.2.7 (Identitätssatz für Polynome).
Es seien f (X), g(X) ∈ R[X] zwei Polynome. Für die zugehörigen Polynomfunktionen
R → R,
R → R,
f:
und g :
x 7→ f (x),
x 7→ g(x),
gelte
f (x) = g(x) für alle x ∈ R.
Dann sind die beiden Polynome gleich, d.h. in R[X] gilt
f (X) = g(X).
Die Aussage der Folgerung, besagt, dass es im Bereich der reellen Polynome eine
bijektive Zuordnung zwischen den Polynomen und den zugehörigen Polynomfunktionen gibt. Solange wir uns im Bereich der reellen Polynome aufhalten, brauchen
wir daher keine Unterscheidung zwischen Polynomen und den zugehörigen Polynomfunktionen machen. Wir werden daher im Folgenden auch nur von (reellen)
Polynomen sprechen.
3.3. Interpolation
74
Bemerkungen 3.2.8 (Nullstellen von Polynomen).
Ein ausserordentlich wichtiges Grundproblem beim Rechnen mit Polynomen ist die
Nullstellenbestimmung. Das Auffinden von Formeln für die Nullstellen von vorgelegten Polynomen, sogenannte Auflösungsformeln, war ab dem ausgehenden Mittelalter eine der Hauptuntersuchungsgegenstände in der aufkommenden Algebra.
• Einen ersten Erfolg erzielte der französische Jurist und Mathematiker Francois Viete (Vieta) (1540 - 1603) mit der Angabe einer Auflösungsformel für
Polynome
f (x) = x2 + a · x + b = 0, a, b ∈ R,
vom Grad 2, sie lautet
x1/2
a
=− ±
2
r
a2
− b, falls a2 − 4 · b ≥ 0.
4
Im Fall a2 − 4 · b < 0 besitzt das Polynom f (x) keine reellen Nullstellen.
• Der italienische Arzt, Philosoph und Mathematiker Geranimo (Girolamo) Cardano (1501 - 1576) gab Auflösungsformeln für Polynome dritten und vierten
Grades an, die Formeln stammen aber ursprünglich nicht von ihm. Beide Formeln sind für das praktische Rechnen zu kompliziert, sie haben daher nur
theoretische Bedeutung.
• Die Frage nach der Existenz von allgemeingültigen Auflösungsformeln für Polynome höheren Grades wurde erst am Beginn des 19. Jhs. beantwortet. Der
jung verstorbene norwegische Mathematiker Niels Henrik Abel (1802 - 1829)
bewies, dass es ab dem Grad 5 keine allgemeingültigen Auflösungsformeln geben kann.
3.3
Interpolation
Eine in der Praxis häufiger auftretende Aufgabe ist die Folgende. Vorgegeben seien
n paarweise verschiedene Punkte
a1 , a2 , . . . , an ∈ R,
ai 6= aj für i 6= j, i, j = 1, . . . , n,
Gesucht ist eine Funktion
f : R → R, x 7→ y = f (x),
mit
f (aj ) = bj für j = 1, . . . , n,
n ∈ N.
3.3. Interpolation
75
dabei seien
b1 , . . . , bn ∈ R
vorgeschriebene Werte. Gesucht ist also eine Funktion f , deren Graph durch die
vorgegebenen Punkte (a1 , b1 ), . . . , (an , bn ) verläuft. Eine solche Aufgabe nennt man
eine Interpolationsaufgabe. Natürlich gibt es sehr viele verschiedene Funktionen,
die das Verlangte tun. Daher wird man sich meistens auf eine bestimmte Klasse von
Funktionen einschränken, z. B. auf die Klasse der (reellen) Polynome. Man spricht
dann von einer Polynominterpolation. Im Folgenden wird für vorgegebene Punkte
(a1 , b1 ), . . . , (an , bn ) ∈ R2 mit ai 6= aj für i 6= j, i, j = 1, . . . , n, n ∈ N ein Polynom
angegeben, das sogenannte Interpolationspolynom von Lagrange, für das
f (aj ) = bj für j = 1, . . . , n,
gilt. Man bilde hierzu zunächst für j = 1, . . . , n die Polynome
Lj (x) =
n
Y
i=1,i6=j
x − ai
∈ R[x].
aj − ai
Beachte
1. Da die Punkte a1 , a2 , . . . , an als paarweise verschieden vorausgesetzt sind, gilt
stets
aj − ai 6= 0 für i 6= j,
es wird also nirgends durch 0 dividiert.
2. Das Produkt besteht aus (n − 1) Faktoren, es gilt folglich
grad(Lj (x)) = n − 1,
j = 1, . . . , n.
3. Für k = 1, . . . , n gilt
Lj (ak ) =
0,
1,
falls k 6= j,
falls k = j.
Zum besseren Verständnis sind im Folgenden für n = 4 und Punkte
a1 , a2 , a3 , a4 ∈ R, a1 6= a2 , a3 , a4 , a2 6= a3 , a4 , a3 6= a4 ,
die vier Polynome Lj (x), j = 1, 2, 3, 4, ausgeschrieben.
3.3. Interpolation
76
(x − a2 ) · (x − a3 ) · (x − a4 )
,
(a1 − a2 ) · (a1 − a3 ) · (a1 − a4 )
(x − a1 ) · (x − a3 ) · (x − a4 )
L2 (x) =
,
(a2 − a1 ) · (a2 − a3 ) · (a2 − a4 )
(x − a1 ) · (x − a2 ) · (x − a4 )
L3 (x) =
,
(a3 − a1 ) · (a3 − a2 ) · (a3 − a4 )
(x − a1 ) · (x − a2 ) · (x − a3 )
L4 (x) =
,
(a4 − a1 ) · (a4 − a2 ) · (a4 − a3 )
L1 (x) =
L1 (a1 ) = 1, L1 (a2 ) = 0, L1 (a3 ) = 0, L1 (a4 ) = 0,
L2 (a1 ) = 0, L2 (a2 ) = 1, L2 (a3 ) = 0, L2 (a4 ) = 0,
L1 (a1 ) = 0, L1 (a2 ) = 0, L1 (a3 ) = 1, L1 (a4 ) = 0,
L1 (a1 ) = 0, L1 (a2 ) = 0, L1 (a3 ) = 0, L1 (a4 ) = 1.
Das Interpolationspolynom nach Lagrange lautet jetzt
L(x) =
n
X
j=1
Beachte
bj · Lj (x) =
n
X
j=1
bj ·
n
Y
i=1,i6=j
!
x − ai
.
aj − ai
1. Es gilt
grad(L(x)) ≤ n − 1.
2. Für k = 1, . . . , n gilt
L(ak ) =
n
X
j=1
bj · Lj (ak ) = bk .
Damit ist die gestellt Interpolationsaufgabe gelöst.
Beispiel 3.3.1.
Es seien
Dann gilt
a1 = −2, a2 = −1, a3 = 2, a4 = 3.
(x + 1) · (x − 2) · (x − 3)
,
20
(x + 2) · (x − 2) · (x − 3)
L2 (x) =
,
12
(x + 2) · (x + 1) · (x − 3)
L3 (x) = −
,
12
(x + 2) · (x + 1) · (x − 2)
L4 (x) =
.
20
L1 (x) = −
Für
b1 = 3, b2 = 2, b3 = −2, b4 = −1,
3.3. Interpolation
77
ergibt sich das Interpolationspolynom nach Lagrange zu
L(x) = b1 · L1 (x) + b2 · L2 (x) + b3 · L3 (x) + b4 · L4 (x)
2
1
107
3
=
· x3 +
· x2 −
·x+ .
15
20
60
10
3
2
1
–4
–3
–2
–1
1
2
3
4
x
–1
–2
Schaubild der Graphen des Polynoms L(x) für x ∈ [−4, 4].
Beachte
Sind f, g ∈ R[x] zwei Polynome, welche die gestellte Interpolationsaufgabe lösen,
welche also für k = 1, . . . , n die Bedingungen
f (ak ) = bk = g(ak )
erfüllen, so folgt
f (ak ) − g(ak ) = 0 für k = 1, . . . , n.
Das Polynom f − g ∈ R[x] besitzt folglich die n paarweise verschiedene Nullstellen
a1 , . . . , an . Mit Hilfe von Satz 3.2.4. erhält man hieraus die Darstellung
f (x) − g(x) = (x − a1 ) · . . . · (x − an ) · q(x)
mit einem Polynom q ∈ R[x]. Wegen
grad((x − a1 ) · . . . · (x − an )) = n
folgt hieraus, dass sich zwei verschiedene Polynome f und g, welche die gestellte
Interpolationsaufgabe lösen, sich um ein Polynom unterscheiden, welches mindestens
den Grad n hat. Wegen grad(L(x)) ≤ n − 1 ist das Interpolationspolynom von
Lagrange das eindeutig bestimmte Polynom mit dem kleinsten Grad, welches die
gestellte Interpolationsaufgabe löst.
3.4. Ableitungen von Polynomen
3.4
78
Ableitungen von Polynomen
Schon in der Schule (vergl. die Einheit Kurvendiskussion) wird die Ableitung einer
Funktion
f : R → R, x 7→ f (x),
in einem Punkt x = a, a ∈ R, als Grenzwert, falls existent, eingeführt
f (x) − f (a)
f ′ (x) = lim
.
x→a
x−a
Die Funktion f heißt differenzierbar auf R, falls dieser Grenzwert in jedem Punkt
a ∈ R existiert, und die Funktion
f ′ : R → R, x 7→ f ′ (x),
nennt man die Ableitung der Funktion f . Ist die Ableitung f ′ wiederum differenzierbar, so kann man die zweite Ableitung f ′′ als Ableitung der Funktion f ′ bilden.
Fährt man sofort, so erhält man die höheren Ableitungen
f ′′ , f ′′′ , f (4) , f (5) , . . . , f (n) , . . ..
Jedes Polynom f (x) ∈ R[x] besitzt Ableitungen beliebiger Ordnung. Gilt
f (x) = a0 + a1 · x + a2 · x2 + a3 · x3 + . . . + an−1 · xn−1 + an · xn ∈ R[x], n ∈ N0 ,
so ist die Ableitung von f wieder ein Polynom, die Ableitung lautet
f ′ (x) = a1 + 2 · a2 · x + 3 · a3 · x2 + . . . + (n − 1) · an−1 · xn−2 + n · an · xn−1 .
Ist also f ein Polynom vom Grad n, n ∈ N, so ist die Ableitung f ′ von f ein
Polynom vom Grad (n − 1).
Definition 3.4.1.
Ist
f : R → R, x 7→ y = f (x),
eine (auf R) differenzierbare Funktion mit der Ableitung
f ′ : R → R, x 7→ f ′ (x),
so nennt man die Nullstellen der Ableitung f ′ die stationären Punkte der Funktion f .
Beachte
Ist x0 ∈ R, so lautet die Gleichung der Tangente an den Graphen der Funktion f
im Punkt (x0 y0 ) = (x0 , f (x0 )
y = y0 + f ′ (x0 ) · (x − x0 ).
Die stationären Punkte einer differenzierbaren Funktion f sind folglich genau die
Punkte, in denen die Tangente parallel zur x-Achse verläuft.
3.4. Ableitungen von Polynomen
79
Beispiel 3.4.2.
Es sei
f (x) = 2 · x3 + 3 · x2 − 12 · x + 1,
x ∈ R.
Die Ableitung der Funktion f lautet
f ′ (x) = 6 · x2 + 6 · x − 12 = 6 · (x − 1) · (x + 2),
x ∈ R.
Die Funktion f besitzt folglich die beiden stationären Punkte
x1 = 1 und x2 = −2.
Definition 3.4.3.
Es sei
f (x) = a0 + a1 · x + a2 · x2 + . . . + an−1 · xn−1 + an · xn ∈ R[x]
ein reelles Polynom. Weiter sei x0 ∈ R eine Nullstelle des Polynoms f . Die Nullstelle
x0 heißt eine k-fache Nullstelle, k ∈ N, falls es ein Polynom q ∈ R[x] gibt mit
f (x) = (x − x0 )k · q(x)
und
q(x0 ) 6= 0 (also (x − x0 ) ∤ q(x)).
Bemerkung 3.4.4.
Es seien f ∈ R[x] ein reelles Polynom und x0 ∈ R eine k-fache Nullstelle von
f, k ∈ N. Dann ist x0 eine (k −1)-fache Nullstelle der Ableitung f ′ (x). Insbesondere
ist im Fall k = 1 die Nullstelle x0 keine Nullstelle der Ableitung f ′ .
Beweis:
Stellt man das Polynom f wie oben dar in der Form
f (x) = (x − x0 )k · q(x) mit q(x) ∈ R[x] und q(x0 ) 6= 0,
so ergibt sich mit Hilfe der Produktregel für die Ableitung
f ′ (x) = k · (x − x0 )k−1 · q(x) + (x − x0 )k · q ′ (x)
= (x − x0 )k−1 · (k · q(x) + (x − x0 ) · q ′ (x)) .
|
{z
}
=e
q (x)
Einsetzen von x = x0 ergibt
qe(x0 ) = k · q(x0 ) + (x0 − x0 ) · q ′ (x) = k · q(x0 ) 6= 0,
und dies bedeutet, dass die Ableitung f ′ (x) die (k − 1)-fache Nullstelle x0 besitzt.
3.4. Ableitungen von Polynomen
80
Aus der obigen Bemerkung folgt unmittelbar der folgende Satz.
Satz 3.4.5.
Es sei f ∈ R[x] ein reelles Polynom. Genau dann ist x0 ∈ R eine k-fache Nullstelle
von f , wenn für die Funktion f und ihre Ableitungen gilt
f (x0 ) = f ′ (x0 ) = . . . = f (k−1) (x0 ) = 0
und
f (k) (x0 ) 6= 0.
Definition 3.4.6 (Lokale Extremstellen).
Eine Funktion
f : R → R, x 7→ y = f (x),
besitzt im Punkt x0 ∈ R
• ein lokales Maximum, falls es ein ε > 0 gibt mit
f (x) ≤ f (x0 ) für alle x ∈ R mit x0 − ε < x < x0 + ε,
bzw.
• ein lokales Minimum, falls es ein ε > 0 gibt mit
f (x) ≥ f (x0 ) für alle x ∈ R mit x0 − ε < x < x0 + ε.
Satz 3.4.7.
Jede lokale Extremstelle (lokale Maximal- bzw. Minimalstelle) einer (auf R) differenzierbaren Funktion ist ein stationärer Punkt der Funktion f .
Beachte
Wie das Beispiel
f : R → R, x 7→ y = f (x) = x3 + 1,
zeigt, ist aber nicht jeder stationäre Punkt einer Funktion f eine lokale Extremstelle
von f . Wie man sofort nachrechnet, besitzt die Funktion f (x) = x3 + 1 im Punkt
x0 = 0 einen stationären Punkt. Der Punkt x0 = 0 ist aber weder eine lokale
Maximalstelle noch eine lokale Minimalstelle der Funktion f .
Satz 3.4.8.
Es seien f ∈ R[x]\R ein nichtkonstantes Polynom und x0 ∈ R ein stationärer Punkt
der Funktion f . Unter diesen Voraussetzungen ist x0 ∈ R eine k-fache Nullstelle des
Polynoms
g(x) = f (x) − f (x0 ),
wobei k ≥ 2 gilt. Man beachte, dass für die Ableitungen der Funktion g gilt
g (j) (x) = f (j) (x) für alle j ∈ N.
3.4. Ableitungen von Polynomen
81
Da x0 eine k-fache Nullstelle von g ist, folgt
g(x) = (x − x0 )k · q(x) mit einem Polynom q ∈ R[x] mit q(x0 ) 6= 0,
also
f (x) = f (x0 ) + (x − x0 )k · q(x) mit einem Polynom q ∈ R[x] mit q(x0 ) 6= 0.
Es können mehrere Fälle eintreten.
1. Fall Es sei k ≡ 0 (mod 2), also k = 2 · ℓ mit ℓ ∈ N, also
f (x) = f (x0 ) + (x − x0 )2·ℓ · q(x) mit einem Polynom q ∈ R[x] mit q(x0 ) 6= 0.
Fall 1.1. Es gelte q(x0 ) > 0, in diesem Fall besitzt die Funktion f im Punkt x0 eine
lokale Minimalstelle.
Fall 1.2. Es gelte q(x0 ) < 0, in diesem Fall besitzt die Funktion f im Punkt x0 eine
lokale Maximalstelle.
2. Fall: Es sei k ≡ 1 (mod 2), also k = 2 · ℓ + 1 mit ℓ ∈ N. In diesem Fall besitzt die
Funktion f im Punkt x0 keine lokale Extremstelle.
Beispiel 3.4.9.
Es sei
f (x) = x7 + 8 · x6 + 23 · x5 + 22 · x4 − 24 · x3 − 80 · x2 − 80 · x − 25
= 7 + (x + 2)4 · (x3 − x − 2), x ∈ R.
|
{z
}
=q(x)
Es gilt
f ′ (x) = (x + 2)3 · (7 · x3 + 6 · x2 − 5 · x − 10), f ′ (−2) = 0,
f ′′ (x) = (x + 2)2 · (42 · x3 + 72 · x2 + 4 · x − 40), f ′′ (−2) = 0,
f ′′′ (x) = 6 · (x + 2) · (35 · x3 + 90 · x2 + 50 · x − 12), f ′′′ (−2) = 0,
f (4) (x) = 840 · x3 + 2880 · x2 + 2760 · x + 528,
f (4) (−2) = −192 6= 0.
Folglich ist x0 = −2 eine 4-fache Nullstelle der Funktion f , und es gilt
q(−2) = −8 + 2 − 2 − 8 < 0,
also besitzt die Funktion f im Punkt x0 = −2 eine lokale Maximalstelle.