Kapitel 7 - antriebstechnik.fh
Werbung

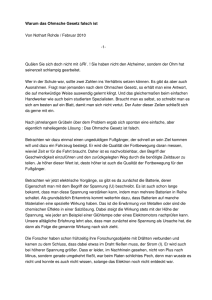
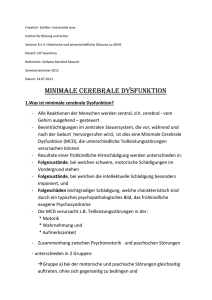
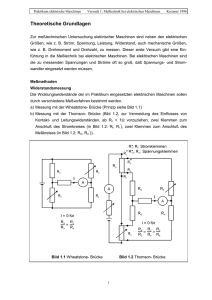
7 Drehstromsteller Drehstromsteller werden zur verlustlosen Steuerung von Dreiphasensystemen eingesetzt. Die Frequenz wird nicht verändert. Sie werden im unteren Leistungsbereich zum Spannungsanlauf und zur Drehzahlregelung von Asynchronmotoren mit Widerstandsläufern verwendet. Der Sternpunkt der Wicklungen ist dort meistens nicht zugänglich. Im oberen Leistungsbereich werden Kompensationsanlagen mit Drehstromstellern betrieben. Übungsziele: • Untersuchung verschiedener W3-Schaltungen: mit zugänglichem Sternpunkt; mit unzugänglichem Sternpunkt • Vergleich von Leiter- und Strangspannungen als Funktion des Steuerwinkels • Vergleich von Leiter- und Strangströmen als Funktion des Steuerwinkels • Vergleich der Sperrspannungsverläufe • Verlauf der Wirk- und Blindleistungen als Funktion des Steuerwinkels • Verlauf der Oberschwingungen im Strom als Funktion des Steuerwinkels Übungsdateien: MATHCAD: SIMPLORER: 7.1 w3l.mcd; w3r.mcd w3rl_y.ssh; w3rl_y_m.ssh; Verbraucher mit zugänglichem Sternpunkt Beim Anschluss dreier Wechselstromsteller an ein Dreiphasennetz entsteht ein Drehstromsteller W3. Wenn der Verbraucher in Sternschaltung einen zugänglichen Sternpunkt besitzt (Bild 7.1), beeinflussen sich die Phasen untereinander nicht. Die Spannungen und Ströme am Verbraucher haben die gleiche Kurvenform wie beim Anschluss an eine W1-Schaltung. Mit dieser Schaltungsvariante werden dynamische Kompensatoren gebaut. 7.2 Verbraucher mit unzugänglichem Sternpunkt 95 Bild 7.1: Drehstromsteller mit verbundenem Sternpunkt 7.2 Verbraucher mit unzugänglichem Ster npunkt Häufig ist der Sternpunkt der Last nicht zugänglich. Das ist z.B. bei Asynchronmotoren der Fall, die durch Drehstromsteller gesteuert werden. Dann sind die Spannungs- und Stromverläufe einer Phase nicht mehr voneinander unabhängig. Die Leiter- und Strangspannungen an der Last beeinflussen sich untereinander je nach Schaltzustand der Ventile (Bild 7.2). Bild 7.2: Drehstromsteller ohne Sternpunktanschluss 7 Drehstromsteller 96 7.2.1 Konstruktion der Lastspannungen Aus den sinusförmig angenommenen Strangspannungen u S des Netzes wird durch den Steller die variable Lastspannung u L durch Anschnittsteuerung erzeugt. Der entsprechende Effektivwert ULα wird gegenüber der speisenden Netzspannung US über α verringert. Index S kennzeichnet die speisende Spannung und Index L die Lastspannung. Im Folgenden sollen die Lastspannung u L1 im Strang 1 und die Leiterspannung u L12 zwischen Strang 1 und Strang 2 aus der speisenden Spannung u S in Abhängigkeit von den Schaltstellungen konstruiert werden. Ein Schalter pro Phase symbolisiert in Bild 7.3 eine Gruppe antiparallel geschalteter Ventile. Die Spannungsric htungen sind durch die Zahlenfolge der Indizes am Pfeil vorgegeben. Technisch sinnvolle Schaltzustände sind in Bild 7.3 gezeichnet. Es gibt vier sinnvolle Schaltzustände, die sich in Zeitintervallen von 30° ändern. Bild 7.3: Schaltzustände 7.2 Verbraucher mit unzugänglichem Sternpunkt 97 Im Folgenden werden aus den Schaltzuständen die Leiterspannung und die Strangspannung einer Phase an der Last hergeleitet. Dieses Verfahren wird in MATHCAD zur Berechnung der Laste xtremfälle verwendet, um die Spannungen und Ströme als Funktion des Steuerwinkels zu berechnen. Es werden vier Fälle unterschieden: a) S 1 und S2 sind geschlossen: u L12 = u S12 = u S1 - u S2 u L1 = u S12 = (uS1 - u S2)/2 Leiterspannung Strangspannung b) S 1 und S3 sind geschlossen: u L12 = u L1 = (uS1 - u S3 )/2 - u 13 / = u S13 /2 Leiter- und Strangspannung c) S 2 und S3 sind geschlossen: u L12 = (uS3 - u S2 )/2 = -u S23 /2 u L1 = 0 Leiterspannung Strangspannung d) S1 und S2 und S3 sind geschlossen: u L12 = u S12 = u S1 - u S2 Leiterspannung Die rein ohmsche und die rein induktive Last unterscheiden sich durch die verschiedene Stromführungsdauer τd , die für diese beiden besonderen Lastfälle ohne iterative Verfahren ermittelt wird. In der Datei w3r.mcd für den rein ohmschen Lastfall und der Datei w3l.mcd für den rein induktiven Lastfall erfolgt die Berechnung durch MATHCAD. Der Steuerwinkel α wird vom Nulldurchgang der speisenden Strangspannung gemessen. Für die ohmsche Last wird der Steuerbereich in vier Abschnitte unterteilt: • Im Bereich 0 ≤ α ≤ 60° gilt abwechselnd Fall a), b) oder d) Jedes leitende Ventil übernimmt während des Stromführungswinkels τd = π - α den Laststrom. • Im Bereich 60° ≤ α ≤ 90° gilt abwechselnd Fall a), b) Jedes leitende Ventil übernimmt während des Stromführungswinkels τd = 2π/3 den Laststrom. • Im Bereich 90° ≤ α ≤ 150° gilt abwechselnd Fall a), b) Der Strangstrom besteht aus zwei Teilstücken der Stromführungsdauer τd = 5π/6 unterbrochen durch Lücken der Dauer α - π/2. • Im Bereich 150° ≤ α 180° ist nur ein Schalter geschlossen. Es kann deswegen kein Strom fließen. 7 Drehstromsteller 98 Im rein induktiven Lastfall kann der Steller nur mit Steuerwinkeln 90° ≤ α ≤ 150° arbeiten, da für kleinere α bereits Vollsteuerung erreicht wird: • Im Bereich 90° ≤ α ≤ 120° gilt abwechselnd Fall a), b) oder d) Jedes leitende Ventil übernimmt während des Stromführungswinkels τd = 2 (π – α) den Laststrom. • Im Bereich 120° ≤ α ≤ 150° gilt abwechselnd Fall a), b) Der Strangstrom lückt. Er besteht aus zwei Teilstücken 7.2.2 Konstruktion der Sperrspannungen Ideale Ventile besitzen im geschalteten Zustand keinen Innenwiderstand. Am Ventilsatz im Strang 1 liegt z.B. nur Sperrspannung u v1 an, wenn der Schalter S 1 offen ist. Das Ventil führt nach den Voraussetzungen keinen Strom. Es sind folgende drei Schalterstellungen möglich: • S 2 ist geschlossen und S 3 ist offen: u v1 = u S1 – u S2 = u S12 • S 2 ist offen und S 3 ist geschlossen: u v1 = u S1 – u S3 = u S13 = -u S31 • S 2 und S3 sind geschlossen: u v1 = u S1 – (uS2 + u S3 )/2 = 3/2 u S Die Leiter- und Strangspannungen u L12 und u L1 folgen je nach Schalterstellung den Kurvenverläufen der speisenden Spannung u S. Bei ideal ohmscher und rein induktiver Last kann man die Effektivwerte als Funktion des Steuerwinkels α für die verschiedenen Bereiche abschnittsweise geschlossen berechnen. Die Steuerkennlinien in Bild 7.4 setzen sich deshalb aus mehreren Teilstücken zusammen. Sie sind Grenzkennlinien für gemischt ohmsch-induktive Lasten. Der Steuerwinkel α muss immer die Bedingung nach Gleichung (7.1) erfüllen, da sonst keine Aussteuerung erfolgt. Der Stromrichter ist dann wirkungslos. Steuerbedingung für ohmsch-induktive Lasten: ωL αmin > arctan =ϕ R (7.1) 7.2 Verbraucher mit unzugänglichem Sternpunkt 99 Tabelle 7.1: Steuerkennlinien Steuerbereich 0° ≤ α ≤ 60° U Lá 3α 3 = 1− + sin 2α UL 2ð 4ð Z=R Steuerbereich 60° ≤ α≤ 90° Z=R U Lá = UL 1 3 3 3 − + sin (2α + 30 ° ) 2 4ð 4ð Steuerbereich 90° ≤ α≤ 150° Z=R U Lá = UL 5 3α 3 − + sin (2α + 60 ° ) 4 2ð 4ð Steuerbereich 90° ≤ α≤ 120° Z = ωL U Lá = UL 5 3α 3 − + sin 2α 2 ð 2ð Steuerbereich 120° ≤ α ≤ 150° Z = ωL U Lá = UL 5 3α 3 − + sin (2α + 60 ° ) 2 ð 2ð Nach den Gleichungen in Tabelle 7.1 wurden die Steuerkennlinien in Bild 7.4 für rein ohmsche und für reine induktive Last bestimmt. Sie grenzen den steuerbaren Spannungsbereich ab. Zwischen den Kennlinien liegen die Zustände, die nur mit dem SIMPLORER zu simulieren sind. 1 ϕ = 0° ϕ = 90° 0,8 0,6 0,4 0,2 0 0° 30° 60° 90° 120° Bild 7.4: Steuerkennlinien der W3-Schaltung α 150° 100 7 Drehstromsteller Beim gewählten Steuerwinkel α = 110° liegen Kennlinien für die beiden besonderen Lastzustände im steuerbaren Bereich. Deswegen können beide Programme mit gleichem Steuerwinkel arbeiten. Die Spannungsverläufe über der Zeit lassen sich mit MATHCAD berechnen. Die Bilder 7.5 und 7.6 aus den Dateien w3l.mcd; w3r.mcd zeigen die Strangspannungen an der Last bei α = 110°. Diese Betriebszustände liegen direkt auf den Steuerkennlinien und nicht im Bereich zwischen ihnen. Die jeweilige Grundschwingung der stark verzerrten Spannung ist eingezeichnet. Die Spannungen können mit MATHCAD leicht in ihre sinusförmigen Bestandteile zerlegt werden. Ebenso wie bei der Wechselwegschaltung wird auch hier die Minderung der Wirkleistung durch einen starken Anstieg der Blindleistung erkauft. Bild 7.5: Strangspannung bei rein ohmscher Last bei α = 110° Bild 7.6: Strangspannung bei rein induktiver Last bei α = 110° 7.2 Verbraucher mit unzugänglichem Sternpunkt 101 Bild 7.7: W3-Schaltung aus SIMPLORER-Datei Wird die SIMPLORER-Datei w3rly.ssh geladen, liegt auf der Schematic-Oberfläche die Schaltung nach Bild 7.7. Damit können im Gegensatz zur Simulation in MATHCAD alle Zwischenzustände bei ohmsch-induktiver Last untersucht werden. Durch Doppelklick auf die Bauelemente werden die entsprechenden Daten geändert. Die Übergangswiderstände des Netzes können durch Eingabe entsprechender Werte der Leitungswiderstände simuliert werden. Das Beispiel in Bild 7.8 ist im ViewTool des SIMPLORER mit einer Last aus R = 10 Ω und L = 5 mH beim Steuerwinkel von α = 110° ausgegeben. Es handelt sich also um eine ohmsche Last mit induktivem Anteil. Mit diesen Lastwerten wird ϕ = 8,9°. Der Strom lückt. Die Spannungen liegen nicht mehr symmetrisch zu ihrem Nulldurchgang. Ohne induktive Glättung verschwinden die Nulldurchgänge der Spannung, siehe Bild 7.5. Der Betriebspunkt liegt zwischen den Steuerkennlinien (Bild 7.4). Bei dieser Last muss der kleinste Steuerwinkel α min >8,9° sein, um eine wirksame Verkleinerung der Ausgangsspannung zu erreichen. Bild 7.9 zeigt nochmals die Lastströme mit den Sperrspannungen. Sie liegen an den Ventilen, wenn sie nicht durchgeschaltet sind. Über den Scheitelwert der Sperrspannungen kann die maximale Spannungs belastung der Ventile bestimmt werden. 102 7 Drehstromsteller Bild 7.8: Spannung und Strom bei ohmsch-induktiver Last bei α = 110° Bild 7.9: Sperrspannung und Strom bei ohmsch-induktiver Last bei α = 110° 7.3 Oberschwingungen 7.3 103 Oberschwingungen Mit den MATHCAD-Dateien w3r.mcd oder w3l.mcd kann der Drehstromsteller mit den Grenzlasten des idealisierten ohmschen Widerstandes oder der idealisierten Induktivität hinsichtlich des Oberschwingungsverhaltens experimentell untersucht werden. Oberschwingungsbehaftete Leiterströme können über Zuleitungsinduktivitäten des Netzes auch die Eingangsspannung verzerren. Da sich die Grundschwin gung des Leiterstromes gegenüber der Netzspannung durch die Ansteuerung mit dem Steuerwinkel α verschiebt, wird das Netz mit Steuerblindleistung belastet, auch wenn nur ein ohmscher Widerstand angeschlossen ist. Die Amplitudenspektren der Spannungsverläufe aus Bild 7.5 und Bild 7.6 sind in Bild 7.10 und Bild 7.11 gezeigt. Die Spektren sind auf den Scheitelwert der je weiligen Grundschwingung bezogen. Wie in allen Drehstromsystemen entfallen sämtliche durch drei teilbaren Oberschwingungen. Es wird vorgeschlagen die Leistungsanalysen selbst durchzuführen, wie es bei der W1-Schaltung gezeigt wurde. Bild 7.10: Amplitudenspektrum des Beispiels für rein ohmsche Last Bild 7.11: Amplitudenspektrum des Beispiels für rein induktive Last