DE112009001282B420130606
Werbung

(19)
*DE112009001282B420130606*
(10)
DE 11 2009 001 282 B4 2013.06.06
Patentschrift
(12)
(21) Deutsches Aktenzeichen: 11 2009 001 282.5
(86) PCT-Aktenzeichen: PCT/JP2009/059226
(87) PCT-Veröffentlichungs-Nr.: WO 2009/145085
(86) PCT-Anmeldetag: 19.05.2009
(87) PCT-Veröffentlichungstag: 03.12.2009
(43) Veröffentlichungstag der PCT Anmeldung
in deutscher Übersetzung: 14.04.2011
(45) Veröffentlichungstag
der Patenterteilung: 06.06.2013
(51) Int Cl.:
G01D 5/245 (2006.01)
G01B 7/30 (2013.01)
Innerhalb von drei Monaten nach Veröffentlichung der Patenterteilung kann nach § 59 Patentgesetz gegen das Patent
Einspruch erhoben werden. Der Einspruch ist schriftlich zu erklären und zu begründen. Innerhalb der Einspruchsfrist ist
eine Einspruchsgebühr in Höhe von 200 Euro zu entrichten (§ 6 Patentkostengesetz in Verbindung mit der Anlage zu §
2 Abs. 1 Patentkostengesetz).
(30) Unionspriorität:
2008-138110
27.05.2008
JP
(73) Patentinhaber:
Mitsubishi Electric Corp., Tokyo, JP
(74) Vertreter:
Meissner, Bolte & Partner GbR, 80538, München,
DE
(54) Bezeichnung: Drehwinkelerfassungsvorrichtung
(57) Hauptanspruch: Drehwinkelerfassungsvorrichtung, Folgendes aufweisend:
einen Stator (1), der aus einem Eisenkern mit Zähnen (3)
gebildet ist, wobei der Stator (1) aufweist:
eine Erregerwicklung (4) einer oder mehrerer Phase/n; und
Ausgangswicklungen (4) zweier oder mehrerer Phasen; und
einen Rotor (2) mit einem Schenkelpol,
wobei die Anzahlen von Windungen der Ausgangswicklungen (4) jeweils einen Wert haben, der durch eine Funktion
erhalten wird, die eine Summe oder Differenz zwischen einer Sinuswelle einer räumlichen Ordnung enthält, die gleich
einem Absolutwert einer Summe einer Anzahl M von Schenkelpolen und einer Anzahl N von Erregerpolpaaren ist, und
einer Sinuswelle einer Ordnung, die gleich einer ganzen Zahl
L ist, die sich von einem Absolutwert der Anzahl N von Erregerpolpaaren und einem Absolutwert einer Differenz unterscheidet, die erhalten wird, indem die Anzahl M von Schenkelpolen von der Anzahl N von Polpaaren subtrahiert wird.
(72) Erfinder:
Nakano, Masatsugu, Tokyo, JP; Henmi, Shinsuke,
Tokyo, JP; Akutsu, Satoru, Tokyo, JP
(56) Für die Beurteilung der Patentfähigkeit in Betracht
gezogene Druckschriften:
DE
EP
EP
EP
102 55 888
1 498 699
1 416 254
1 498 699
A1
B1
A1
A1
DE 11 2009 001 282 B4 2013.06.06
Beschreibung
Technisches Gebiet
[0001] Die vorliegende Erfindung bezieht sich auf eine Drehwinkelerfassungsvorrichtung zum Erfassen des
Drehwinkels eines Rotors von beispielsweise einem Motor.
Stand der Technik
[0002] Ein optischer Codierer wird als Drehwinkelerfassungsvorrichtung verwendet, wird aber in einem eingeschränkten Temperaturumfeld eingesetzt, ist vom Aufbau her komplex und teuer. Deshalb wurden als Drehwinkelerfassungsvorrichtung, die vom Aufbau her einfach, kostengünstig und selbst in einem Hochtemperaturumfeld dauerhaft ist, herkömmlicher Weise Drehwinkelerfassungsvorrichtungen angedacht, die eine Veränderung in der Permeanz eines Spalts zwischen einem Rotor und einem Stator nutzen. Beispielsweise sind
in der Patentliteratur eine Drehwinkelerfassungsvorrichtung, die Erregerwicklungen zweier Phasen und eine
Ausgangswicklung einer Phase umfasst, eine Drehwinkelerfassungsvorrichtung, die eine Erregerwicklung einer Phase und Ausgangswicklungen zweier Phasen umfasst, und eine Drehwinkelerfassungsvorrichtung offenbart, deren Wicklungsanzahl variiert, um sich einer Sinuswelle anzupassen (siehe z. B. Patentschriften 1
bis 4).
[0003] Zum Beispiel umfasst die in der Patentschrift 1 offenbarte Drehwinkelerfassungsvorrichtung einen Stator, der aus einem Eisenkern mit Zähnen gebildet ist, um die eine Erregerwicklung einer oder mehrerer Phase/
n und Ausgangswicklungen zweier oder mehrerer Phasen gewickelt sind, und einen Rotor mit einem Schenkelpol. Wenn ein Wellenwinkelmultiplikator größer ausgelegt wird, nimmt in der Proportion auch die Anzahl
von Zähnen zu.
Liste der Anführungen
Patentliteratur
[0004]
[Patentschrift 1] JP 62-58445 B
[Patentschrift 2] JP 49-124508 A
[Patentschrift 3] JP 08-178610 A
[Patentschrift 4] JP 08-178611 A
[Patentschrift 5] DE 102 55 888 A1
[Patentschrift 6] EP 1 498 699 A1
[Patentschrift 7] EP 1 416 254 A1
Zusammenfassung der Erfindung
Technisches Problem
[0005] Bei den herkömmlichen Drehwinkelerfassungsvorrichtungen verursacht eine Erhöhung des Wellenwinkelmultiplikators jedoch eine Zunahme der Anzahl von Zähnen, was eine Be- und Verarbeitbarkeit der Wicklungen herabsetzt. Darüber hinaus führt die Zunahme bei der Anzahl von Zähnen zu einer schmäleren Schlitzbreite, was beim Einführen einer Düse einer Wickelmaschine Schwierigkeit bereitet. Somit liegt ein Problem
in ihrem unrealistischen Aufbau, der sich dann nicht für eine Massenproduktion eignet, wenn die Anzahl von
Zähnen wie oben genannt zunimmt.
[0006] In einem Fall, bei dem wie in den Patentschriften 3 und 4 die Anzahl von Wicklungen je nach der Sinuswelle variiert, gibt es einen Zahn mit einer Wicklung mit einer nur geringen Anzahl von Windungen. Wenn
man einen Wicklungsvorgang unter Verwendung einer Maschine betrachtet, so muss eine Düse einer automatischen Wickelmaschine den Zahn, der eine Wicklung mit nur einer geringen Anzahl an Windungen hat,
bewegen, und es ist eine lange Zeit erforderlich, um die Düse auszurichten, was zu einem Problem eines
geringen Wirkungsgrads der Wicklungsarbeit führt.
[0007] Patentschrift 5 beschreibt eine Rotationswinkelerfassungsvorrichtung mit einem Statorkern, welcher
eine Vielzahl von Kernblättern umfasst, die jeweils eine Vielzahl von Kernelementen aufweisen. Die Kernelemente umfassen dabei jeweils einen Zahnabschnitt und einen Jochabschnitt.
2/46
DE 11 2009 001 282 B4 2013.06.06
[0008] Patentschrift 6 beschreibt ein Drehwinkelerfassungsgerät, bei dem Zwei-Phasen Ausgangswicklungen
um eine Vielzahl von Zähnen des Stators gewickelt sind. Die entsprechenden Zahlen der Wicklungszahlungen
der Zwei-Phasen Ausgangswicklungen werden erhalten, indem m-Phasen Wicklungszahlen (m ist eine ganze
Zahl gleich oder größer 3), die im Vorhinein definiert sind, auf 2-Phasen Wicklungszahlen umgerechnet werden.
Die Windungszahlen der α-Phase Wicklungen und der β-Phase Wicklungen im i-ten Zahn werden dabei gemäß
definierten Formeln festgelegt.
[0009] Nachteiligerweise kann es bei einem Drehwinkelerfassungsgerät gemäß Patentschrift 6 vorkommen,
dass die Anzahl der α-Phase oder β-Phase Wicklungen Null ist
[0010] Patentschrift 7 beschreibt Rotationswinkelerfassungsvorrichtung und eine elektrische Rotationsmaschine. Die Rotationswinkelerfassungsvorrichtung weist dabei einen Stator mit einem Eisenkern mit Zähnen
und mit einer Ein-Phasen-Energiewindung and Zwei-Phasen Ausgangswindungen. Dabei werden insbesondere Vorgaben gemacht für das Verhältnis der Zahl der Polpaare, die Zahl der projizierten Pole des Rotors
und die Zahl der Windungen der Zwei-Phasen Ausgangswindungen.
[0011] Es ist eine Aufgabe der vorliegenden Erfindung, eine Drehwinkelerfassungsvorrichtung mit hoher Erfassungsgenauigkeit bereitzustellen, die, auch wenn der Winkelmultiplikator größer wird, mit einer kleinen Anzahl von Zähnen aufgebaut werden kann, wodurch ihre Bearbeitbarkeit gesteigert und sie für Massenproduktion geeignet wird.
Lösung des Problems
[0012] Eine Drehwinkelerfassungsvorrichtung nach der vorliegenden Erfindung umfasst: einen Stator, der aus
einem Eisenkern mit Zähnen gebildet ist, wobei der Stator umfasst: eine Erregerwicklung einer Phase oder
mehrerer Phasen; und Ausgangswicklungen zweier oder mehrerer Phasen; und einen Rotor mit einem Schenkelpol, wobei die Anzahl von Windungen der Ausgangswicklungen jeweils einen Wert haben, der durch eine
Funktion erhalten wird, die eine Summe oder eine Differenz zwischen einer Sinuswelle einer räumlichen Ordnung, die gleich einem Absolutwert einer Summe einer Anzahl M von Schenkelpolen und einer Anzahl N von
Erregungspolpaaren ist, und einer Sinuswelle einer Ordnung enthält, die gleich einer ganzen Zahl L ist, die sich
von einem Absolutwert der Anzahl N von Erregungspolpaaren unterscheidet, und sich von einem Absolutwert
einer Differenz unterscheidet, die erhalten wird, indem die Anzahl M von Schenkelpolen von der Anzahl N von
Polpaaren subtrahiert wird.
[0013] Darüber hinaus umfasst eine andere Drehwinkelerfassungsvorrichtung nach der vorliegenden Erfindung: einen Stator, der aus einem Eisenkern mit Zähnen gebildet ist, wobei der Stator umfasst: eine Erregerwicklung einer Phase oder mehrerer Phasen; und Ausgangswicklungen zweier oder mehrerer Phasen; und
einen Rotor mit einem Schenkelpol, wobei die Anzahl von Windungen der Ausgangswicklungen jeweils einen
Wert haben, der durch eine Funktion erhalten wird, die eine Summe oder eine Differenz zwischen einer Sinuswelle einer Ordnung, die gleich einem Absolutwert einer Differenz ist, die erhalten wird, indem eine Anzahl M
von Schenkelpolen von einer Anzahl N von Erregungspolpaaren subtrahiert wird, und einer Sinuswelle einer
Ordnung enthält, die gleich einer ganzen Zahl L ist, die sich von einem Absolutwert der Anzahl N von Erregungspolpaaren unterscheidet, und sich von einem Absolutwert einer Summe der Anzahl M von Schenkelpolen und der Anzahl N von Polpaaren unterscheidet.
Vorteilhafte Wirkungen der Erfindung
[0014] Die Drehwinkelerfassungseinheit nach der vorliegenden Erfindung hat eine Wirkung dahingehend,
dass der größte Wert der Anzahl von Windungen kleiner ausgelegt werden kann als im Falle der herkömmlichen Drehwinkelerfassungsvorrichtung und sie somit von ausgezeichneter Wicklungsbearbeitbarkeit ist.
[0015] Darüber hinaus ist die Drehwinkelerfassungsvorrichtung, selbst wenn der Wellenwinkelmultiplikator
größer wird, mit einer geringeren Anzahl von Zähnen aufgebaut als im Falle der herkömmlichen Drehwinkelerfassungsvorrichtung und somit von ausgezeichneter Wicklungsbearbeitbarkeit und für Massenproduktion
geeignet.
Kurze Beschreibung der Zeichnungen
[0016] Fig. 1 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer ersten Ausführungsform der vorliegenden Erfindung darstellt.
3/46
DE 11 2009 001 282 B4 2013.06.06
[0017] Fig. 2 ist ein konkretes Beispiel für Wicklungen in der Drehwinkelerfassungsvorrichtung nach der ersten
Ausführungsform der vorliegenden Erfindung.
[0018] Fig. 3 ist eine konkrete, erläuternde grafische Darstellung der Wicklungen in der Drehwinkelerfassungsvorrichtung nach der ersten Ausführungsform der vorliegenden Erfindung.
[0019] Fig. 4 ist eine weiteres konkretes Beispiel für die Wicklungen in der Drehwinkelerfassungsvorrichtung
nach der ersten Ausführungsform der vorliegenden Erfindung.
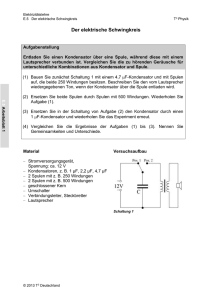
[0020] Fig. 5 ist eine erläuternde grafische Darstellung, die Spannungen von Ausgangswicklungen in der
Drehwinkelerfassungsvorrichtung nach der ersten Ausführungsform der vorliegenden Erfindung darstellt.
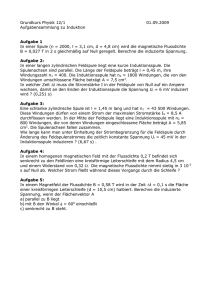
[0021] Fig. 6 ist eine erläuternde grafische Darstellung eines konkreten Beispiels für die Anzahlen von Windungen in einer herkömmlichen Drehwinkelerfassungsvorrichtung.
[0022] Fig. 7 ist eine erläuternde grafische Darstellung eines Vergleichs zwischen der vorliegenden Erfindung
und dem herkömmlichen Beispiel.
[0023] Fig. 8 ist eine erläuternde grafische Darstellung des weiteren konkreten Beispiels für die Wicklungen
in der Drehwinkelerfassungsvorrichtung nach der ersten Ausführungsform der vorliegenden Erfindung.
[0024] Fig. 9 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer zweiten Ausführungsform der vorliegenden Erfindung darstellt.
[0025] Fig. 10 ist ein konkretes Beispiel für Wicklungen in der Drehwinkelerfassungsvorrichtung nach der
zweiten Ausführungsform der vorliegenden Erfindung.
[0026] Fig. 11 ist eine konkrete, erläuternde grafische Darstellung der Wicklungen in der Drehwinkelerfassungsvorrichtung nach der zweiten Ausführungsform der vorliegenden Erfindung.
[0027] Fig. 12 ist eine weiteres konkretes Beispiel für die Wicklungen in der Drehwinkelerfassungsvorrichtung
nach der zweiten Ausführungsform der vorliegenden Erfindung.
[0028] Fig. 13 ist eine erläuternde grafische Darstellung, die Spannungen von Ausgangswicklungen in der
Drehwinkelerfassungsvorrichtung nach der zweiten Ausführungsform der vorliegenden Erfindung darstellt.
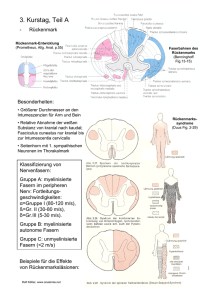
[0029] Fig. 14 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
dritten Ausführungsform der vorliegenden Erfindung darstellt.
[0030] Fig. 15 ist ein konkretes Beispiel für Wicklungen in der Drehwinkelerfassungsvorrichtung nach der
dritten Ausführungsform der vorliegenden Erfindung.
[0031] Fig. 16 ist eine konkrete, erläuternde grafische Darstellung der Wicklungen in der Drehwinkelerfassungsvorrichtung nach der dritten Ausführungsform der vorliegenden Erfindung.
[0032] Fig. 17 ist ein weiteres konkretes Beispiel für die Wicklungen in der Drehwinkelerfassungsvorrichtung
nach der dritten Ausführungsform der vorliegenden Erfindung.
[0033] Fig. 18 ist eine erläuternde grafische Darstellung, die Spannungen von Ausgangswicklungen in der
Drehwinkelerfassungsvorrichtung nach der dritten Ausführungsform der vorliegenden Erfindung darstellt.
[0034] Fig. 19 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
vierten Ausführungsform der vorliegenden Erfindung darstellt.
[0035] Fig. 20 ist ein konkretes Beispiel für Wicklungen in der Drehwinkelerfassungsvorrichtung nach der
vierten Ausführungsform der vorliegenden Erfindung.
[0036] Fig. 21 ist eine konkrete, erläuternde grafische Darstellung der Wicklungen in der Drehwinkelerfassungsvorrichtung nach der vierten Ausführungsform der vorliegenden Erfindung.
4/46
DE 11 2009 001 282 B4 2013.06.06
[0037] Fig. 22 ist eine weiteres konkretes Beispiel für die Wicklungen in der Drehwinkelerfassungsvorrichtung
nach der vierten Ausführungsform der vorliegenden Erfindung.
[0038] Fig. 23 ist eine erläuternde grafische Darstellung, die Spannungen von Ausgangswicklungen in der
Drehwinkelerfassungsvorrichtung nach der vierten Ausführungsform der vorliegenden Erfindung darstellt.
[0039] Fig. 24 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
fünften Ausführungsform der vorliegenden Erfindung darstellt.
[0040] Fig. 25 ist ein konkretes Beispiel für Wicklungen in der Drehwinkelerfassungsvorrichtung nach der
fünften Ausführungsform der vorliegenden Erfindung.
[0041] Fig. 26 ist eine konkrete, erläuternde grafische Darstellung der Wicklungen in der Drehwinkelerfassungsvorrichtung nach der fünften Ausführungsform der vorliegenden Erfindung.
[0042] Fig. 27 ist eine weiteres konkretes Beispiel für die Wicklungen in der Drehwinkelerfassungsvorrichtung
nach der fünften Ausführungsform der vorliegenden Erfindung.
[0043] Fig. 28 ist eine erläuternde grafische Darstellung, die Spannungen von Ausgangswicklungen in der
Drehwinkelerfassungsvorrichtung nach der fünften Ausführungsform der vorliegenden Erfindung darstellt.
[0044] Fig. 29 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
sechsten Ausführungsform der vorliegenden Erfindung darstellt.
[0045] Fig. 30 ist ein konkretes Beispiel für Wicklungen in der Drehwinkelerfassungsvorrichtung nach der
sechsten Ausführungsform der vorliegenden Erfindung.
[0046] Fig. 31 ist eine konkrete, erläuternde grafische Darstellung der Wicklungen in der Drehwinkelerfassungsvorrichtung nach der sechsten Ausführungsform der vorliegenden Erfindung.
[0047] Fig. 32 ist eine weiteres konkretes Beispiel für die Wicklungen in der Drehwinkelerfassungsvorrichtung
nach der sechsten Ausführungsform der vorliegenden Erfindung.
[0048] Fig. 33 ist eine erläuternde grafische Darstellung, die Spannungen von Ausgangswicklungen in der
Drehwinkelerfassungsvorrichtung nach der sechsten Ausführungsform der vorliegenden Erfindung darstellt.
[0049] Fig. 34 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
siebten Ausführungsform der vorliegenden Erfindung darstellt.
[0050] Fig. 35 ist ein konkretes Beispiel für Wicklungen in der Drehwinkelerfassungsvorrichtung nach der
siebten Ausführungsform der vorliegenden Erfindung.
[0051] Fig. 36 ist eine konkrete, erläuternde grafische Darstellung der Wicklungen in der Drehwinkelerfassungsvorrichtung nach der siebten Ausführungsform der vorliegenden Erfindung.
[0052] Fig. 37 ist ein weiteres konkretes Beispiel für die Wicklungen in der Drehwinkelerfassungsvorrichtung
nach der siebten Ausführungsform der vorliegenden Erfindung.
[0053] Fig. 38 ist eine erläuternde grafische Darstellung, die Spannungen von Ausgangswicklungen in der
Drehwinkelerfassungsvorrichtung nach der siebten Ausführungsform der vorliegenden Erfindung darstellt.
[0054] Fig. 39 ist eine erläuternde Ansicht eines Aufbaus einer elektrischen Servolenkungsvorrichtung nach
einer achten Ausführungsform der vorliegenden Erfindung.
[0055] Fig. 40 ist eine erläuternde Ansicht eines Aufbaus einer dynamoelektrischen Maschine nach der achten
Ausführungsform der vorliegenden Erfindung.
5/46
DE 11 2009 001 282 B4 2013.06.06
Beschreibung der Ausführungsformen
Erste Ausführungsform
[0056] Fig. 1 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer ersten Ausführungsform der vorliegenden Erfindung darstellt.
[0057] Die Drehwinkelerfassungsvorrichtung nach der ersten Ausführungsform der vorliegenden Erfindung
umfasst einen Stator 1, der mit Zähnen 3 und Wicklungen 4 versehen ist, die um die Zähne 3 gewickelt sind,
und einen Rotor 2 mit Schenkelpolen. Der einfachen Darstellung halber stellt Fig. 1 nur Hauptteile der Drehwinkelerfassungsvorrichtung dar und lässt Details davon weg, wie etwa ein Isolierteil zwischen der Wicklung 4
und dem Zahn 3, und einen Verbindungsdraht und einen Anschluss der Wicklung 4. Fig. 1 stellt eine Drehwinkelerfassungsvorrichtung dar, bei der es sich bei der Anzahl der Zähne 3 um 10 handelt und der Wellenwinkelmultiplikator 4 beträgt (die Anzahl der Schenkenpole des Rotors 2 beträgt 4). Die den Zähnen 3 gegebenen
Zahlen sind Nummern der Zähne 3, die aus praktischen Gründen vergeben wurden.
[0058] Die Wicklungen 4 umfassen eine Erregerwicklung und eine Ausgangswicklung. Die in Fig. 1 dargestellten Wicklungen 4 sind so um den Zahn 3 gewickelt, dass sie einen dreischichtigen Aufbau bilden. Zum
Beispiel ist die Erregerwicklung an der inneren Umfangsschichtseite um den Zahn 3 und diesem am nächsten
gewickelt, und die Ausgangswicklungen von zwei Phasen sind an der äußeren Umfangsschichtseite um den
Zahn 3 gewickelt. Festzuhalten wäre, dass die Art und Weise des Wicklungsvorgangs für die Wicklungen 4
nicht darauf beschränkt ist und die Ausgangswicklungen auch an der Innenseite der Wicklungen oder in einer
radialen Richtung angeordnet gewickelt sein können.
[0059] Als Nächstes erfolgt eine Beschreibung des Funktionsprinzips der Drehwinkelerfassungsvorrichtung
nach der ersten Ausführungsform der vorliegenden Erfindung.
[0060] Eine Wechselstromspannung wird an die Erregerwicklung angelegt, um der Erregerwicklung einen
Erregerstrom zu liefern. Die Frequenz der Wechselstromspannung beträgt z. B. bis zu 10 kHz. Aufgrund des
Stroms, der durch die Erregerwicklung fließt, wird ein Magnetfluss in einem Spalt zwischen dem Stator 1 und
dem Rotor 2 der Drehwinkelerfassungsvorrichtung erzeugt, und der Magnetfluss geht auch auf die um den
Stator gewickelte Ausgangswicklung über. Im Ergebnis wird in der Ausgangswicklung eine Spannung erzeugt.
[0061] Im Übrigen hat der Rotor 2 eine unregelmäßige Form, wie in Fig. 1 gezeigt ist. In diesem Beispiel hat
der Rotor 2 einen Aufbau mit vier Schenkelpolen. Bei diesem Aufbau verändert sich die Permeanz zwischen
dem Stator 1 und dem Rotor 2, und von daher wird der im Spaltabschnitt erzeugte Magnetfluss von dieser
Veränderung der Permeanz beeinflusst.
[0062] Somit ändert sich der Magnetfluss je nach einem Drehwinkel des Rotors 2, und im Ergebnis ändert
sich auch die in der Ausgangswicklung erzeugte Spannung. Die Anzahl von Windungen ist so gewählt, dass
die Spannungen der Ausgangswicklungen zweier Phasen ein Verhältnis einer Sinuswelle und einer Cosinuswelle im Hinblick auf den Drehwinkel haben und der Drehwinkel entsprechend erfasst werden kann, wenn die
Spannungen der Ausgangswicklungen zweier Phasen gemessen werden.
[0063] Als Nächstes erfolgt eine Beschreibung dahingehend, wie die Anzahl von Windungen der Wicklung
4 in der Drehwinkelerfassungsvorrichtung nach der ersten Ausführungsform der vorliegenden Erfindung zu
wählen sind.
[0064] Fig. 2 ist ein konkretes Beispiel für die Wicklungen 4 in der Drehwinkelerfassungsvorrichtung nach
der ersten Ausführungsform der vorliegenden Erfindung. In Fig. 2 stehen Plus- und Minuszeichen für Wicklungsrichtungen, d. h. das Minuszeichen gibt an, dass die Wicklung in einer zu derjenigen des Pluszeichens
entgegengesetzten Richtung gewickelt ist, und die Zahlen stehen jeweils für die Anzahl von Windungen.
[0065] Als Erstes wird die Erregerwicklung beschrieben.
[0066] Die Erregerwicklung dient dazu, aufgrund eines sie durchfließenden Erregerstroms einen Magnetfluss
zu erzeugen. In dem Beispiel von Fig. 2 sind die Erregerwicklungen um alle Zähne 3 gewickelt und die Anzahl
von Polen beträgt 10, d. h. die Anzahl von Polpaaren beträgt 5. In dem Beispiel von Fig. 2 sind konkret 50
Windungen der Erregerwicklungen so gewickelt, dass sich die Polarität zwischen benachbarten Zähnen 3
unterscheidet.
6/46
DE 11 2009 001 282 B4 2013.06.06
[0067] Andererseits ist die Anzahl M von Schenkelpolen 2 gleich 4, d. h. die Veränderung der Permeanz hat
eine 4. räumliche Ordnung, vorausgesetzt, eine 1. Ordnung ist als eine Komponente mit einem mechanischen
Winkel von 360° definiert, der als eine Periode angesetzt ist.
[0068] Nun wird betrachtet, wie die Ausgangswicklungen in diesem Fall gewickelt sind.
[0069] Um als Drehwinkelerfassungsvorrichtung zu funktionieren, muss der folgende. Magnetfluss unter den
im Spalt erzeugten Magnetflüssen erfasst werden. Konkret hat der Magnetfluss eine räumliche Ordnung, die
gleich einem Absolutwert eines Werts ist, der erhalten wird, indem der Wellenwinkelmultiplikator M zu einer
Anzahl N von Polpaaren der Erregerwicklungen hinzuaddiert wird, oder einem Absolutwert eines Werts, der
erhalten wird, indem der Wellwinkelmultiplikator M von der Anzahl N von Erregerpolpaaren, subtrahiert wird (im
Nachstehenden, wenn in einem mathematischen Ausdruck ausgedrückt, ausgedrückt als {|(Anzahl von Erregerpolpaaren) ± (Wellenwinkelmultiplikator)|, |N ± N|}, worin || ein Symbol ist, das einen Absolutwert darstellt.
[0070] Weil bei der in Fig. 1 dargestellten Drehwinkelerfassungsvorrichtung die Anzahl N von Polpaaren der
Erregerwicklungen 5 beträgt und der Wellenwinkelmultiplikator M 4 ist, hat der zu erfassende Magnetfluss eine
9. oder 1. räumliche Ordnung, die gleich dem Wert |(Anzahl von Erregerpolpaaren) ± (Wellenwinkelmultiplikator)|, d. h. dem Wert |5 ± 4| ist (vorausgesetzt, die 1. räumliche Ordnung stellt eine Komponente mit einem
mechanischen Winkel von 360° dar, der als eine Periode angesetzt ist).
[0071] Um eine solche Auslegung so zu realisieren, dass die Ausgangswicklungen den Magnetfluss der 1.
räumlichen Ordnung erfassen, brauchen die Anzahlen von Windungen der Ausgangswicklungen im Hinblick
auf den mechanischen Winkel der Zähne 3 nur je nach einer Sinuswelle der 1. räumlichen Ordnung zu variieren.
Wenn eine der Ausgangswicklungen zweier Phasen als eine COS-Wicklung, die andere als eine SIN-Wicklung
angesetzt ist, und Ncos(i) und Nsin(i) jeweils die Anzahl der Windungen im i-ten Zahn 3 darstellen (i ist ein ganze
Zahl von 1 bis zu einer Anzahl NS der Zähne 3), dann kann Ncos(i) im Ausdruck (1) und Nsin(i) kann im Ausdruck
(2) ausgedrückt werden, vorausgesetzt, N1 ist eine beliebige reelle Zahl, NS ist die Anzahl der Zähne 3 und
θ1 und θ2 sind beliebige reelle Zahlen.
[Ausdruck 1]
[0072] In diesem Fall ist N1 der größte Wert der Anzahl von Windungen der Ausgangswicklungen von zwei
Phasen. Wenn die Anzahlen von um den Zahn 3 gewickelten Windungen kleiner sind, ist ein Zeitraum, der
für die Wickelarbeit der Zähne 3 erforderlich ist, kürzer, und von daher ist es gewünscht, dass der größte
Wert der Anzahl von Windungen kleiner ist. Wenn technische Wickelvorschriften verglichen werden, in denen
dieselbe Ausgangsspannung erzeugt wird, zeichnet sich diejenige in Massenproduktivität aus, die kleiner im
größten Wert der Anzahl von Windungen ist. Speziell dann, wenn die Anzahl von Windungen je nach der
Sinuswelle variiert, nimmt der größte Wert von Windungen zu und deshalb ist ein langer Zeitraum für die
Wickelarbeit erforderlich, was zu einem Problem führt, dass die Massenproduktivität herabgesetzt ist. Darüber
hinaus variieren die Anzahlen von Windungen aller Wicklungen, was dahingehend zu einem Problem führt,
dass die Wicklungsauslegung schwer nachzuvollziehen ist.
[0073] Angesichts des Vorstehenden löst die Drehwinkelerfassungsvorrichtung nach der ersten Ausführungsform der vorliegenden Erfindung diese Probleme, indem den Ausdrücken (1) und (2) eine Komponente mit
einer anderen als der 1. oder 9. räumlichen Ordnung hinzugefügt wird. Eine weitere harmonische Komponente
wird hinzugefügt, um den Scheitelwert der Sinuswelle zu senken. Anzumerken wäre, dass eine Komponente
mit einer räumlichen Ordnung, die gleich der Anzahl N von Erregerpolpaaren ist, vermieden wird. Wenn die
Komponente mit der räumlichen Ordnung, die gleich der Anzahl N von Erregerpolpaaren ist, enthalten ist,
wird ein Magnetfluss erfasst, der vom Erregerstrom herrührt und eine Ordnung hat, die gleich der Anzahl von
Polpaaren ist, was zu einer geringeren Erfassungsgenauigkeit führt. Dementsprechend ist die Funktion als
Drehwinkelerfassungsvorrichtung gesenkt. Um diesen Fall zu vermeiden, wird hier eine Komponente mit einer
7/46
DE 11 2009 001 282 B4 2013.06.06
5. räumlichen Ordnung vermieden und zum Beispiel eine Komponente mit einer 3. räumlichen Ordnung hinzugefügt. Dabei wird die Anzahl Ncos(i) von Windungen der COS-Wicklung im Ausdruck (3) ausgedrückt, und
die Anzahl Nsin(i) von Windungen der SIN-Wicklung wird in Ausdruck (4) ausgedrückt, vorausgesetzt, dass es
sich bei NS um die Anzahl von Schlitzen handelt, N1, N2, θ1, θ2, η1 und η2 beliebige reelle Zahlen sind, und das
Doppelzeichen in jedem der Ausdrücke (3) und (4) beliebig gewählt ist.
[Ausdruck 2]
[0074] Darüber hinaus erfüllt als ein Verfahren zum Wählen von N2 dessen Sollwert, dass die Anzahlen von
Windungen der COS-Wicklungen im 1. und 2. Zahn zueinander gleich sind. Speziell wird Ncos(1) = Ncos(2)
gelöst, vorausgesetzt, dass NS = 10, θ1 = θ2 = 0 und η1 = η2 = 216° ist, und ein Verhältnis N2/N1 von N2 zu
N1 in Ausdruck (5) ausgedrückt ist.
[Ausdruck 3]
[0075] Auf diese Weise können die Anzahlen der Wicklungen unter den mehreren Zähnen 3 gleich ausgelegt
werden, was insofern eine Wirkung hervorruft, als die Auslegung der Anzahl von Windungen leichter nachzuvollziehen und herzustellen ist als in dem Fall, in dem die Anzahlen von Windungen von allen Zähnen 3
unterschiedlich sind.
[0076] Fig. 2 stellt die Anzahlen der Windungen in jedem der Zähne 3 dar, vorausgesetzt, dass NS = 10, θ1 = θ2
= 0 und η1 = η2 = 216°, N1 = 100 ist, N2 auf den Wert in Ausdruck (5) angesetzt ist und was das Doppelzeichen
betrifft, Plus in Ausdruck (3) verwendet wird, während Minus in Ausdruck (4) verwendet wird. Dezimalzahlen
können hier als Ausdruck der Anzahl von Windungen angenommen werden.
[0077] Fig. 3 ist eine grafische Darstellung, die die Ausgangswicklung von Fig. 2 veranschaulicht, wobei die
Abszissenachse die Zahnnummer und die Ordinatenachse die Anzahl von Windungen darstellt (einschließlich
der Vorzeichen).
[0078] Im Gegensatz zu den Wicklungen der herkömmlichen Drehwinkelerfassungsvorrichtung, bei der die
Anzahl von Windungen sinusförmig variiert, sind die Anzahlen von Windungen in der unmittelbaren Nähe der
Scheitelwerte der Sinuswelle speziell für die COS-Wicklung in den Zähnen 3 mit den Zahnnummern 1, 5, 6
und 10, und für die SIN-Wicklung in den Zähnen 3 mit den Zahnnummern 3 und 8 verringert.
[0079] In den Ausdrücken (1) und (2), welche die Anzahlen von Windungen in der herkömmlichen Drehwinkelerfassungsvorrichtung angeben, sind, wenn N1 = 100 ist, die Anzahlen von Windungen wie in Fig. 6 verteilt.
Wenn die in Fig. 3 und Fig. 6 dargestellten Anzahlen von Wicklungen miteinander verglichen werden, weist
zum Beispiel bei dem Zahn mit der Zahnnummer 3 die Anzahl von Windungen in Fig. 6 den größten Wert auf,
ist aber in Fig. 3 um ca. 20% gesenkt.
[0080] Jedoch wird, auch wenn die größte Anzahl an Windungen verringert wird, die Ausgangsspannung auf
Grundlage eines Parameters der räumlichen Ordnung bestimmt, der gleich dem Absolutwert der Summe ist,
die erhalten wird, indem der Wellenwinkelmultiplikator zur Anzahl N von Erregerpolpaaren hinzuaddiert wird,
oder dem Absolutwert der Differenz, die erhalten wird, indem der Wellenwinkelmultiplikator M von der Anzahl
N von Erregerpolpaaren subtrahiert wird. In diesem Fall wird die Ausgangsspannung auf Grundlage von N1
8/46
DE 11 2009 001 282 B4 2013.06.06
hinsichtlich der 1. räumlichen Ordnung bestimmt, und von daher ist die Ausgangsspannung dieselbe. Somit
kann mit den Wicklungen der Drehwinkelerfassungsvorrichtung nach der ersten Ausführungsform der vorliegenden Erfindung der größte Wert der Anzahl von Windungen gesenkt werden, während die Ausgangsspannung dieselbe ist, was insofern eine Wirkung hervorruft, als der Wirkungsgrad der Wickelarbeit gesteigert wird.
[0081] Fig. 4 stellt die Anzahlen von Windungen, die als ganze Zahlen ausgedrückt sind, in jedem der Zähne
dar, wobei die in Fig. 2 dargestellten Anzahlen von Windungen gerundet sind.
[0082] Fig. 5 ist eine grafische Darstellung von Spannungen der Ausgangswicklungen in dieser Wicklungsfestlegung. In Fig. 5 stellt die Abszissenachse einen Drehwinkel, bei dem es sich um einen mechanischen
Winkel handelt, und die Ordinatenachse einen Scheitelwert der Spannung dar. Plus- und Minuszeichen der
Spannung stellen eine Phasendifferenz dar. Für sowohl die COS-Wicklung als auch die SIN-Wicklung ist eine
Sinuswelle mit einem mechanischen Winkel von 90° erzielt, der als eine Periode angesetzt ist.
[0083] Darüber hinaus beträgt die Phasenverschiebung 22,5°. 22,5 multipliziert mit dem Wellenwinkelmultiplikator 4 ergibt 90°. Mit anderen Worten handelt es sich bei der Phasendifferenz zwischen der COS-Wicklung
und der SIN-Wicklung um einen elektrischen Winkel von 90°. Dies bedeutet, dass die Vorrichtung als eine
Drehwinkelerfassungsvorrichtung funktioniert, bei der der Wellenwinkelmultiplikator 4 beträgt.
[0084] Darüber hinaus bestätigt sich aus dieser Tatsache, dass die Vorrichtung auch dann als eine hochgenaue Drehwinkelerfassungsvorrichtung funktioniert, wenn die Anzahlen von Windungen nicht genau gleich den
Werten der Ausdrücke (3) und (4) sind. In dem hier beschriebenen Beispiel ist die Anzahl von Windungen auf
die nächste ganze Zahl gerundet, aber die vorliegende Erfindung ist nicht darauf beschränkt, und dieselbe
Wirkung lässt sich auch in einem Fall erzielen, in dem die Anzahl von Windungen als eine auf die nächste
ganze Zahl abgekürzte ganze Zahl ausgedrückt ist. Bei den in Fig. 5 dargestellten Wellenformen handelt es
sich um sinusförmige Wellenverläufe, die kaum höhere Oberschwingungen enthalten, und von daher kann
eine hochgenaue Drehwinkelerfassungsvorrichtung erzielt werden.
[0085] Darüber hinaus gibt es in dem Fall, bei dem wie in den Patentschriften 3 und 4 die Anzahl von Windungen je nach der Sinuswelle variiert, einen Zahn 3, der eine Wicklung mit einer nur geringen Anzahl an Windungen hat. Wenn man den Wickelvorgang für die Wicklungen 4 unter Verwendung einer Maschine betrachtet, so
muss eine Düse der automatischen Wickelmaschine den Zahn 3 bewegen, der die Wicklung 4 mit einer nur
geringen Anzahl von Windungen hat, und es wird ein langer Zeitraum zum Ausrichten der Düse benötigt, was
zu einem geringen Wirkungsgrad bei der Wickelarbeit führt. Bei der Drehwinkelerfassungsvorrichtung nach
der ersten Ausführungsform der vorliegenden Erfindung hingegen gibt es keine Wicklung 4 mit einer geringen
Anzahl von Windungen, mit dem Ergebnis, dass der Wirkungsgrad der Wickelarbeit gesteigert ist.
[0086] Darüber hinaus betragen in der technischen Wicklungsauslegung der Drehwinkelerfassungsvorrichtung nach der ersten Ausführungsform der vorliegenden Erfindung die Anzahlen von Windungen der COSWicklungen im Zahn 3, der die Zahnnummern 3 und 8 hat, Null. Wenn solch ein Zahn 3 vorhanden ist, dessen
Anzahl von Windungen Null beträgt, erübrigt es sich, zu erwähnen, dass eine Wirkung der Steigerung des
Wirkungsgrads der Wickelarbeit erzielt wird, weil der Zahn 3 keines Wickelvorgangs mittels der Wickelmaschine bedarf.
[0087] Fig. 8 ist ein grafische Darstellung, die die Anzahlen von Windungen in jedem der Zähne 3 zeigt, vorausgesetzt, dass NS = 10, θ1 = θ2 = 0 und η1 = η2 = 216°, N1 = 100 und N2 = 15 ist, was sich von dem in Ausdruck
(5) erhaltenen Wert unterscheidet. Fig. 8 stellt die Anzahl von Windungen dar, vorausgesetzt, dass, was das
Doppelzeichen betrifft, Plus in Ausdruck (3) verwendet wird, während Minus im Ausdruck (4) verwendet wird.
Selbst wenn der Wert von N2 anders ist, funktioniert die Vorrichtung als Drehwinkelerfassungsvorrichtung, und
somit kann dieselbe Wirkung erzielt werden.
[0088] Als Nächstes erfolgt eine Beschreibung des allgemeinen Vorgehens, wie die Anzahl von Windungen
der Wicklung nach der ersten Ausführungsform der vorliegenden Erfindung zu wählen ist.
[0089] Wenn N die Anzahl von Erregerpolpaaren und M die Anzahl der Schenkelpole des Rotors darstellt,
wird, um aus den im Spalt entstehenden Magnetflüssen eine Komponente einer räumlichen Ordnung zu erfassen, die gleich einem Absolutwert einer Summe ist, die erhalten wird, indem ein Wellenwinkelmultiplikator
M zur Anzahl N von Erregerpolpaaren hinzuaddiert wird, oder einem Absolutwert einer Differenz, die erhalten
wird, indem der Wellenwinkelmultiplikator M von der Anzahl N von Erregerpolpaaren subtrahiert wird, die Ausgangswicklung so um den Zahn 3 gewickelt, dass die Anzahl von Windungen je nach der Wellenform variiert,
9/46
DE 11 2009 001 282 B4 2013.06.06
die erhalten wird, indem eine Sinuswelle einer Ordnung, die gleich dem Absolutwert der Summe ist, die erhalten wird, indem der Wellenwinkelmultiplikator M zur Anzahl N von Erregerpolpaaren hinzuaddiert wird, oder
dem Absolutwert der Differenz, die erhalten wird, indem der Wellenwinkelmultiplikator M von der Summe N
der Erregerpolpaare subtrahiert wird, und eine Sinuswelle einer L-ten Ordnung einander überlagert werden,
um den größten Wert der Anzahl von Windungen zu reduzieren.
[0090] Als der Wert L der Sinuswelle der L-ten Ordnung, der überlagert wird, um den größten Wert der Anzahl
von Windungen zu reduzieren, hat der Wert L einen Absolutwert, der sich von einem Absolutwert von N unterscheidet, um nicht gleich der Anzahl N von Erregerpolpaaren zu sein. Mit anderen Worten erfüllt L|L| ≠ |N|.
[0091] Wenn darüber hinaus die Anzahl N von Erregerpolpaaren gleich dem halben Wert der Anzahl NS von
Zähnen ist, sind eine (|N + M)|-te räumliche Ordnung und eine (|N – M)|-te räumliche Ordnung offensichtlich
gleich in der Verteilung der Anzahlen von Windungen, und von daher ist aus praktischen Gründen L eine ganze
Zahl mit einem Absolutwert, der sich vom Absolutwert der Differenz unterscheidet, die erhalten wird, indem
der Wellenwinkelmultiplikator M von der Anzahl N der Erregerpolpaare subtrahiert wird. Mit anderen Worten
erfüllt L|L| ≠ |N – M|.
[0092] Anzumerken wäre, dass, wenn die Anzahl N von Erregerpolpaaren nicht gleich dem halben Wert der
Anzahl NS von Zähnen ist, L eine ganze Zahl mit einem Absolutwert sein kann, der gleich dem Absolutwert der
Differenz ist, die erhalten wird, indem der Wellenwinkelmultiplikator M von der Anzahl N der Erregherpolpaare
subtrahiert wird. Mit anderen Worten kann L|L| = |N – M| erfüllen.
[0093] Wenn bei der Drehwinkelerfassungsvorrichtung, die den Stator 1 mit der Erregerwicklung einer Phase
und den Ausgangswicklungen zweier Phasen und dem Rotor 2 mit den Schenkelpolen N die Anzahl von Erregerpolpaaren und M die Anzahl von Schenkelpolen des Rotors darstellt, erfüllt die ganze Zahl L|L| ≠ |N| und
|L| ≠ |N – M| und bei den Anzahlen von Windungen der Ausgangswicklungen zweier Phasen handelt es sich
um Werte, die durch eine Funktion erhalten werden, die eine Summe oder Differenz zwischen der Sinuswelle
der (|N + M|)-ten räumlichen Ordnung und der Sinuswelle der L-ten räumlichen Ordnung enthält.
[0094] Die vorstehend erwähnte Tatsache lässt sich wie folgt in mathematischen Ausdrücken weiter eingeschränkt darstellen.
[0095] Die Ausdrücke (6) und (7) stellen die Anzahlen der Windungen der Ausgangswicklungen zweier Phasen dar, die um den i-ten Zahn 3 gewickelt sind. Ncos(i) und Nsin(i) stellen jeweils die Anzahl von Windungen
der Ausgangswicklung dar, die um den i-ten Zahn 3 gewickelt sind. N stellt die Anzahl von Polpaaren der Erregerwicklungen dar, M stellt die Anzahl von Schenkelpolen des Rotors dar und NS stellt die Anzahl von Zähnen
dar. L ist eine ganze Zahl, N1, N2, θ1, θ2, η1 und η2 sind beliebige reelle Zahlen, und das Doppelzeichen ist
in jedem der Ausdrücke (6) und (7) beliebig.
[Ausdruck 4]
[0096] Andererseits unterscheidet sich in einem Fall, in dem die Komponente der (|N – M|)-ten räumlichen
Ordnung erfasst wird, der Absolutwert der ganzen Zahl L vom Absolutwert der Anzahl N von Polpaaren der
Erregerwicklungen, um eine Komponente der Ordnung zu vermeiden, die gleich der Anzahl N von Erregerpolpaaren ist.
[0097] Wenn darüber hinaus die Anzahl N von Erregerpolpaaren gleich dem halben Wert der Anzahl NS von
Zähnen ist, sind die (|N + M|)-te räumliche Ordnung und die (|N – M|)-te räumliche Ordnung offensichtlich gleich
in der Verteilung der Anzahlen von Windungen, und von daher wird die ganze Zahl L aus praktischen Gründen
als den Absolutwert besitzend erachtet, der sich von dem Absolutwert der Summe unterscheidet, die erhalten
10/46
DE 11 2009 001 282 B4 2013.06.06
wird, indem die Anzahl M von Schenkelpolen des Rotor zur Anzahl N von Polpaaren der Erregerwicklungen
hinzuaddiert wird.
[0098] Wenn darüber hinaus die Anzahl N von Erregerpolpaaren nicht gleich dem halben Wert der Anzahl
NS von Zähnen ist, kann die ganze Zahl L den Absolutwert haben, der gleich dem Absolutwert der Summe
ist, die erhalten wird, indem die Anzahl M von Schenkelpolen des Rotors zur Anzahl N von Polpaaren der
Erregerwicklungen hinzuaddiert wird.
[0099] Die vorstehend erwähnte Tatsache lässt sich wie folgt in mathematischen Ausdrücken weiter eingeschränkt darstellen.
[0100] Die Ausdrücke (8) und (9) stellen die Anzahlen der Windungen der Ausgangswicklungen zweier Phasen dar, die um den i-ten Zahn 3 gewickelt sind. Ncos(i) und Nsin(i) stellen jeweils die Anzahl von Windungen
der Ausgangswicklung dar, die um den i-ten Zahn 3 gewickelt ist. N stellt die Anzahl von Polpaaren der Erregerwicklungen dar, M stellt die Anzahl von Schenkelpolen des Rotors dar und NS stellt die Anzahl von Zähnen
dar. L ist eine ganze Zahl, N1, N2, θ1, θ2, η1 und η2 sind beliebige reelle Zahlen, und das Doppelzeichen ist
in jedem der Ausdrücke (8) und (9) beliebig.
[Ausdruck 5]
[0101] Anzumerken wäre, dass die vorliegende Erfindung ungeachtet der Tatsache in die Praxis umgesetzt
wird, ob die Anzahl N von Erregerpolpaaren gleich dem halben Wert der Anzahl NS von Zähnen ist oder nicht.
[0102] Die Beschreibung erfolgte anhand des konkreten Beispiels alleine der 1. räumlichen Ordnung. Wenn
die (|N + M|)-te räumliche Ordnung verwendet wird, wird alternativ N + M = 5 + 4, d. h. die 9. Ordnung in dieser
Ausführungsform erhalten, aber dieselben Wicklungen werden erhalten, indem L = 3 oder 27 angesetzt wird,
mit dem Ergebnis, dass dieselbe Wirkung erzielt werden kann.
[0103] Mit dem vorstehend erwähnten Aufbau kann der größte Wert der Anzahl von Windungen kleiner ausgelegt werden als in dem herkömmlichen Beispiel, was insofern eine Wirkung hervorbringt, als die Wicklungsbearbeitbarkeit ausgezeichnet ist.
[0104] Im herkömmlichen Beispiel ist die Anzahl von Zähnen proportional zum Wellenwinkelmultiplikator.
Wenn der Wellenwinkelmultiplikator zum Beispiel 4 beträgt, ist die Anzahl von Zähnen gleich der Anzahl, die
erhalten wird, indem in einem Fall, in dem der Wellenwinkelmultiplikator 1 beträgt, 4 mit 4 multipliziert wird, d. h.
4 × 4 = 16. In diesem Fall wird die Anzahl von Zähnen 3 hoch und entsprechend ist die Wicklungsbearbeitbarkeit herabgesetzt. Nach der vorliegenden Erfindung handelt es sich bei der Anzahl der Zähne 3 hingegen um
10, auch wenn der Wellenwinkelmultiplikator 4 beträgt. Dementsprechend kann die Drehwinkelerfassungsvorrichtung mit einer geringeren Anzahl der Zähne 3 als in dem herkömmlichen Beispiel bereitgestellt werden,
selbst wenn der Wellenwinkelmultiplikator größer wird.
[0105] Somit hat die Drehwinkelerfassungsvorrichtung nach der ersten Ausführungsform der vorliegenden
Erfindung einen Aufbau, der in der Wicklungsbearbeitung ausgezeichnet und für Massenproduktion geeignet
ist.
Zweite Ausführungsform
[0106] Die vorliegende Erfindung wird nicht nur in dem Fall, in dem es sich bei der Anzahl der Zähne 3 um 10
handelt und der Wellenwinkelmultiplikator 4 beträgt, sondern auch in verschiedenen technischen Auslegungen
in die Praxis umgesetzt.
11/46
DE 11 2009 001 282 B4 2013.06.06
[0107] Fig. 9 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer zweiten Ausführungsform der vorliegenden Erfindung darstellt.
[0108] Die Drehwinkelerfassungsvorrichtung nach der zweiten Ausführungsform der vorliegenden Erfindung
umfasst einen Stator 1, der mit Zähnen 3 und Wicklungen 4 versehen ist, die um die Zähne 3 gewickelt sind,
und einen Rotor 2 mit Schenkelpolen. Der einfachen Darstellung halber stellt Fig. 9 nur Hauptteile der Drehwinkelerfassungsvorrichtung dar und lässt Details davon weg, wie etwa ein Isolierteil zwischen der Wicklung
4 und dem Zahn 3, und einen Verbindungsdraht und einen Anschluss der Wicklung 4.
[0109] Die in Fig. 9 dargestellte Drehwinkelerfassungsvorrichtung ist ein Beispiel, bei dem es sich bei der
Anzahl der Zähne 3 um 8 handelt und der Wellenwinkelmultiplikator 5 beträgt (die Anzahl der Schenkelpole
des Rotors 2 beträgt 5). Die den Zahnabschnitten gegebenen Nummern sind Zahnnummern der Zähne 3, die
aus praktischen Gründen vergeben wurden.
[0110] Ein Funktionsprinzip der Vorrichtung als Drehwinkelerfassungsvorrichtung ist dasselbe wie in der ersten Ausführungsform.
[0111] In dieser Ausführungsform beträgt eine Anzahl N von Erregerpolpaaren 4 und eine Anzahl M von
Schenkelpolen des Rotors beträgt 5. Deshalb beträgt ein Wert |(Anzahl von Erregerpolpaaren) ± (Wellenwinkelmultiplikator)|, d. h. ein Wert |N ± N|, 1 oder 9, und von daher braucht unter den im Spalt erzeugten Magnetflüssen nur eine Komponente einer 1. räumlichen Ordnung oder 9. räumlichen Ordnung in den Ausgangswicklungen erfasst zu werden. Darüber hinaus braucht nur eine Komponente einer Ordnung hinzuaddiert zu
werden, die es ermöglicht, dass der größte Wert der Anzahl von Windungen kleiner ausgelegt werden kann
als im herkömmlichen Fall, bei dem die Anzahl von Windungen je nach der Sinuswelle variiert. In dieser Ausführungsform wird ein Fall betrachtet, bei dem eine Komponente der 1. räumlichen Ordnung erfasst wird. Eine
Ordnung L der hinzuzuaddierenden Komponente wird als 3. Ordnung angesetzt. Dabei werden die Anzahlen
von Windungen in den Ausdrücken (10) und (11) ausgedrückt.
[Ausdruck 6]
[0112] Wenn Ncos(1) = Ncos(2) gelöst ist, vorausgesetzt, dass NS = 8, N1 = 100, θ1 = θ2 = 0 und η1 = η2 = 225°
ist, und was das Doppelzeichen betrifft, Plus in Ausdruck (10) verwendet wird, während Minus in Ausdruck (11)
verwendet wird, ist N2/N1 = 0,4142. Die Anzahlen von Windungen sind in diesem Fall wie in Fig. 10 dargestellt.
Darüber hinaus sind die Anzahlen von Windungen in Fig. 11 veranschaulicht, wobei die Abszissenachse die
Zahnnummer und die Ordinatenachse die Anzahl von Windungen darstellt. Dezimalzahlen können als Ausdruck für die Anzahl von Windungen angenommen werden. In einem Fall, bei dem die Anzahl von Windungen
als Dezimalzahl ausgedrückt ist, wird die Wicklung nicht mit einer Windung um den Zahn 3 gewickelt, sondern der Wicklungsvorgang kann statt dessen zum Beispiel auf halbem Wege zu einem benachbarten Zahn
3 übergehen. Im herkömmlichen Beispiel ist der größte Wert der Anzahl von Windungen gleich N1, d. h. 100,
aber bei der Drehwinkelerfassungsvorrichtung nach der zweiten Ausführungsform der vorliegenden Erfindung
ist der größte Wert der Anzahl von Windungen der Ausgangswicklung 77, was zeigt, dass eine Senkung von
23% erfolgt ist. Fig. 12 stellt Werte dar, die erhalten werden, indem die in Fig. 10 dargestellten Anzahlen
von Windungen gerundet werden. Es erübrigt sich zu erwähnen, dass die Vorrichtung auch in einem solchen
Fall, bei dem die Anzahl von Windungen als ganze Zahl ausgedrückt ist, als Drehwinkelerfassungsvorrichtung
funktioniert. Darüber hinaus wird insofern eine Wirkung hervorgerufen, als die Auslegung einfach ist, weil die
Anzahl von Windungen als ganze Zahl ausgedrückt ist.
[0113] Fig. 13 ist eine grafische Darstellung von Spannungen der Ausgangswicklungen in der technischen
Wicklungsauslegung der zweiten Ausführungsform der vorliegenden Erfindung. Die Abszissenachse stellt einen Drehwinkel als mechanischen Winkel dar, und die Ordinatenachse stellt einen Scheitelwert der Spannung
dar. Plus- und Minuszeichen der Spannung stellen eine Phasendifferenz dar. Bei sowohl der COS-Wicklung
als auch der SIN-Wicklung ist eine Sinuswelle mit einem mechanischen Winkel von 72° erzielt, der als eine
12/46
DE 11 2009 001 282 B4 2013.06.06
Periode angesetzt ist. Darüber hinaus beträgt die Phasenverschiebung 18°. 18 multipliziert mit dem 5 betragenden Wellenwinkelmultiplikator ergibt 90°. Mit anderen Worten handelt es sich bei der Phasendifferenz zwischen der COS-Wicklung und der SIN-Wicklung um einen elektrischen Winkel von 90°. Dies bedeutet, dass
die Vorrichtung als eine Drehwinkelerfassungsvorrichtung funktioniert, bei der der Wellenwinkelmultiplikator 5
beträgt. Bei den in Fig. 13 dargestellten Wellenformen handelt es sich um sinusförmige Wellenverläufe, die
kaum höhere Oberschwingungen enthalten, und vondaher kann nach der vorliegenden Erfindung eine hochgenaue Drehwinkelerfassungsvorrichtung erzielt werden.
[0114] Wenn bei der Drehwinkelerfassungsvorrichtung des herkömmlichen Beispiels der Wellenwinkelmultiplikator 5 beträgt, handelt es sich bei der Anzahl der Zähne 3 um 20. Hingegen handelt es sich bei der Drehwinkelerfassungsvorrichtung nach der zweiten Ausführungsform der vorliegenden Erfindung bei der Anzahl der
Zähne 3 um 8, was viel weniger ist als 20. Mit anderen Worten ist die Drehwinkelerfassungsvorrichtung auch
dann, wenn der Wellenwinkelmultiplikator größer wird, mit einer geringeren Anzahl von Zähnen 3 aufgebaut
als in dem herkömmlichen Beispiel, was insofern eine Wirkung hervorruft, als der Aufbau ausgezeichnet in der
Wicklungsbearbeitbarkeit und für Massenproduktion geeignet ist.
Dritte Ausführungsform
[0115] Fig. 14 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
dritten Ausführungsform der vorliegenden Erfindung darstellt.
[0116] Die Drehwinkelerfassungsvorrichtung nach der dritten Ausführungsform der vorliegenden Erfindung
umfasst einen Stator 1, der mit Zähnen 3 und Wicklungen 4 versehen ist, die um die Zähne 3 gewickelt sind,
und einen Rotor 2 mit Schenkelpolen. Der einfachen Darstellung halber stellt Fig. 14 nur Hauptteile der Drehwinkelerfassungsvorrichtung dar und lässt Details davon weg, wie etwa ein Isolierteil zwischen der Wicklung
4 und dem Zahn 3, und einen Verbindungsdraht und einen Anschluss der Wicklung 4. Die Drehwinkelerfassungsvorrichtung nach der dritten Ausführungsform der vorliegenden Erfindung ist ein Beispiel, bei dem es sich
bei der Anzahl der Zähne um 12 handelt und der Wellenwinkelmultiplikator 5 beträgt (die Anzahl der Schenkelpole des Rotors 2 beträgt 5). Die den Zahnabschnitten gegebenen Nummern sind Zahnnummern der Zähne
3, die aus praktischen Gründen vergeben wurden.
[0117] Ein Funktionsprinzip der Vorrichtung als Drehwinkelerfassungsvorrichtung ist dasselbe wie in der ersten Ausführungsform. In dieser Ausführungsform beträgt eine Anzahl N von Erregerpolpaaren 6 und eine Anzahl M von Schenkelpolen des Rotors beträgt 5. Deshalb beträgt ein Wert |(Anzahl von Erregerpolpaaren) ±
(Wellenwinkelmultiplikator)|, d. h. ein Wert |N ± M|, 1 oder 11, und von daher wird unter den im Spalt erzeugten Magnetflüssen eine Komponente einer 1. räumlichen Ordnung oder 11. räumlichen Ordnung in den Ausgangswicklungen erfasst. Dabei wird eine Komponente einer Ordnung hinzuaddiert, die es ermöglicht, dass
der Wert der Anzahl von Windungen kleiner ausgelegt werden kann als im herkömmlichen Fall, bei dem die
Anzahl von Windungen der Wicklung im Hinblick auf den mechanischen Winkel je nach der Sinuswelle variiert.
In dieser Ausführungsform wird ein Fall betrachtet, bei dem eine Komponente der ersten räumlichen Ordnung
erfasst wird. Eine Ordnung L der hinzuzuaddierenden Komponente wird auf 3 gesetzt. Dabei werden, ähnlich
der zweiten Ausführungsform, die Anzahlen von Windungen in den Ausdrücken (10) und (11) ausgedrückt.
Ncos(1) = Ncos(2) wird gelöst, vorausgesetzt, dass NS = 12, N1 = 100, θ1 = θ2 = 0 und η1 = η2 = 210° ist, und was
das Doppelzeichen betrifft, Plus in Ausdruck (10) verwendet wird, während Minus in Ausdruck (11) verwendet
wird, und es wird N2/N1 erhalten. Die Anzahlen von Windungen sind in diesem Fall wie in Fig. 15 dargestellt.
Darüber hinaus sind die Anzahlen von Windungen in Fig. 16 veranschaulicht, wobei die Abszissenachse die
Zahnnummer und die Ordinatenachse die Anzahl von Windungen darstellt. Dezimalzahlen können als Ausdruck für die Anzahl von Windungen angenommen werden. In einem Fall, bei dem die Anzahl von Windungen
als Dezimalzahl ausgedrückt ist, wird die Wicklung 4 nicht mit einer Windung um den Zahn 3 gewickelt, sondern
der Wicklungsvorgang für die Wicklung 4 kann statt dessen zum Beispiel auf halbem Wege zu einem benachbarten Zahn 3 übergehen. Im herkömmlichen Beispiel ist der größte Wert der Anzahl von Windungen gleich
N1, d. h. 100, aber bei der Drehwinkelerfassungsvorrichtung nach der dritten Ausführungsform ist der größte
Wert der Anzahl von Windungen der Ausgangswicklung 84, was zeigt, dass eine Senkung von 16% erfolgt
ist. Fig. 17 stellt Werte dar, die erhalten werden, indem die in Fig. 15 dargestellten Anzahlen von Windungen
gerundet werden. Es erübrigt sich zu erwähnen, dass die Vorrichtung auch in einem solchen Fall, bei dem
die Anzahl von Windungen als ganze Zahl ausgedrückt ist, als Drehwinkelerfassungsvorrichtung funktioniert.
Darüber hinaus wird insofern eine Wirkung hervorgerufen, als die Auslegung einfach ist, weil die Anzahl von
Windungen als ganze Zahl ausgedrückt ist.
13/46
DE 11 2009 001 282 B4 2013.06.06
[0118] Fig. 18 ist eine grafische Darstellung von Spannungen der Ausgangswicklungen in der technischen
Wicklungsauslegung der dritten Ausführungsform der vorliegenden Erfindung. Die Abszissenachse stellt einen
Drehwinkel als mechanischen Winkel dar, und die Ordinatenachse stellt einen Scheitelwert der Spannung dar.
Plus- und Minuszeichen der Spannung stellen eine Phasendifferenz dar. Bei sowohl der COS-Wicklung als
auch der SIN-Wicklung ist eine Sinuswelle mit einem mechanischen Winkel von 72° erzielt, der als eine Periode angesetzt ist. Darüber hinaus beträgt die Phasenverschiebung 18°. 18 multipliziert mit dem 5 betragenden
Wellenwinkelmultiplikator ergibt 90°. Mit anderen Worten handelt es sich bei der Phasendifferenz zwischen der
COS-Wicklung und der SIN-Wicklung um einen elektrischen Winkel von 90°. Dies bedeutet, dass die Vorrichtung als eine Drehwinkelerfassungsvorrichtung funktioniert, bei der der Wellenwinkelmultiplikator 5 beträgt. Bei
den in Fig. 18 dargestellten Wellenformen handelt es sich um sinusförmige Wellenverläufe, die kaum höhere
Oberschwingungen enthalten, und von daher zeigt sich auch, dass insofern eine Wirkung herbeigeführt werden
kann, als nach der vorliegenden Erfindung eine hochgenaue Drehwinkelerfassungsvorrichtung erzielt werden
kann. Wenn bei dem herkömmlichen Beispiel der Wellenwinkelmultiplikator wie in dieser Ausführungsform 5
beträgt, beträgt die Anzahl der Zähne 20. Hingegen ist die Drehwinkelerfassungsvorrichtung nach der dritten
Ausführungsform der vorliegenden Erfindung so ausgeführt, dass die Anzahl der Zähne 3 12 beträgt, was viel
weniger ist als 20. Mit anderen Worten ist die Drehwinkelerfassungsvorrichtung auch dann, wenn der Wellenwinkelmultiplikator größer wird, mit einer geringeren Anzahl von Zähnen 3 ausgeführt als in dem herkömmlichen Beispiel, was insofern eine Wirkung hervorruft, als der Aufbau ausgezeichnet in der Wicklungsbearbeitbarkeit und für Massenproduktion geeignet ist.
Vierte Ausführungsform
[0119] Fig. 19 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
vierten Ausführungsform der vorliegenden Erfindung darstellt.
[0120] Die Drehwinkelerfassungsvorrichtung nach der vierten Ausführungsform der vorliegenden Erfindung
umfasst einen Stator 1, der mit Zähnen 3 und Wicklungen 4 versehen ist, die um die Zähne 3 gewickelt sind,
und einen Rotor 2 mit Schenkelpolen. Der einfachen Darstellung halber stellt Fig. 19 nur Hauptteile der Drehwinkelerfassungsvorrichtung dar und lässt Details davon weg, wie etwa ein Isolierteil zwischen der Wicklung
4 und dem Zahn 3, und einen Verbindungsdraht und einen Anschluss der Wicklung 4.
[0121] Die Drehwinkelerfassungsvorrichtung nach der vierten Ausführungsform der vorliegenden Erfindung
ist ein Beispiel, bei dem es sich bei der Anzahl der Zähne 3 um 16 handelt und der Wellenwinkelmultiplikator 5
beträgt (die Anzahl der Schenkelpole des Rotors 2 beträgt 5). Die den Zahnabschnitten gegebenen Nummern
sind Zahnnummern der Zähne 3, die aus praktischen Gründen vergeben wurden.
[0122] Ein Funktionsprinzip der Vorrichtung als Drehwinkelerfassungsvorrichtung ist dasselbe wie in der ersten Ausführungsform.
[0123] In dieser Ausführungsform beträgt eine Anzahl N von Erregerpolpaaren 4 und eine Anzahl M von
Schenkelpolen des Rotors beträgt 5. Deshalb beträgt ein Wert |(Anzahl von Erregerpolpaaren) ± (Wellenwinkelmultiplikator)|, d. h. ein Wert |N ± M|, 1 oder 9 und von daher wird unter den im Spalt erzeugten Magnetflüssen eine Komponente einer 1. räumlichen Ordnung oder 9. räumlichen Ordnung in den Ausgangswicklungen
erfasst. Dabei wird eine Komponente einer Ordnung hinzuaddiert, die es ermöglicht, dass der größte Wert der
Anzahl von Windungen kleiner ausgelegt werden kann als im herkömmlichen Fall, bei dem die Anzahl von
Windungen der Wicklung im Hinblick auf den mechanischen Winkel je nach der Sinuswelle variiert. In dieser
Ausführungsform wird ein Fall betrachtet, bei dem eine Komponente der ersten räumlichen Ordnung erfasst
wird. Eine Ordnung L der hinzuzuaddierenden Komponente wird auf 3 gesetzt. Dabei werden, ähnlich der
zweiten Ausführungsform, die Anzahlen von Windungen in den Ausdrücken (10) und (11) ausgedrückt.
[0124] Ncos(1) = Ncos(2) wird gelöst, vorausgesetzt, dass NS = 16, N1 = 100, θ1 = θ2 = 0 und η1 = η2 = 210° ist,
und was das Doppelzeichen betrifft, Plus in Ausdruck (10) verwendet wird, während Minus in Ausdruck (11)
verwendet wird, und es wird N2/N1 erhalten. Die Anzahlen von Windungen sind in diesem Fall wie in Fig. 20
dargestellt. Darüber hinaus sind die Anzahlen von Windungen in Fig. 21 veranschaulicht, wobei die Abszissenachse die Zahnnummer und die Ordinatenachse die Anzahl von Windungen darstellt. Dezimalzahlen können
als Ausdruck für die Anzahl von Windungen angenommen werden. In einem Fall, bei dem die Anzahl von
Windungen als Dezimalzahl ausgedrückt ist, wird die Wicklung 4 nicht mit einer Windung um den Zahn 3 gewickelt, sondern der Wicklungsvorgang für die Wicklung 4 kann statt dessen zum Beispiel auf halbem Wege zu
einem benachbarten Zahn 3 übergehen. Im herkömmlichen Beispiel ist der größte Wert der Anzahl von Windungen gleich N1, d. h. 100, aber bei der Drehwinkelerfassungsvorrichtung nach der vierten Ausführungsform
14/46
DE 11 2009 001 282 B4 2013.06.06
ist der größte Wert der Anzahl von Windungen der Ausgangswicklung ca. 88, was zeigt, dass eine Senkung
von 12% erfolgt ist. Fig. 22 stellt Werte dar, die erhalten werden, indem die in Fig. 20 dargestellten Anzahlen
von Windungen gerundet werden. Es erübrigt sich zu erwähnen, dass die Vorrichtung auch in einem solchen
Fall, bei dem die Anzahl von Windungen als ganze Zahl ausgedrückt ist, als Drehwinkelerfassungsvorrichtung
funktioniert. Darüber hinaus wird insofern eine Wirkung hervorgerufen, als die Auslegung einfach ist, weil die
Anzahl von Windungen als ganze Zahl ausgedrückt ist.
[0125] Fig. 23 ist eine grafische Darstellung von Spannungen der Ausgangswicklungen in der technischen
Wicklungsauslegung der vierten Ausführungsform. In Fig. 23 stellt die Abszissenachse einen Drehwinkel als
mechanischen Winkel und die Ordinatenachse einen Scheitelwert der Spannung dar. Plus- und Minuszeichen
der Spannung stellen eine Phasendifferenz dar. Bei sowohl der COS-Wicklung wie auch der SIN-Wicklung ist
eine Sinuswelle mit einem mechanischen Winkel von 72° erzielt, der als eine Periode angesetzt ist. Darüber
hinaus beträgt die Phasenverschiebung 18°. 18 multipliziert mit dem 5 betragenden Wellenwinkelmultiplikator ergibt 90°. Mit anderen Worten handelt es sich bei der Phasendifferenz zwischen der COS-Wicklung und
der SIN-Wicklung um einen elektrischen Winkel von 90°. Dies bedeutet, dass die Vorrichtung als eine Drehwinkelerfassungsvorrichtung funktioniert, bei der der Wellenwinkelmultiplikator 5 beträgt. Bei den in Fig. 23
dargestellten Wellenformen handelt es sich um sinusförmige Wellenverläufe, die kaum höhere Oberschwingungen enthalten, und von daher zeigt sich auch, dass insofern eine Wirkung hervorgerufen wird, als nach
der vorliegenden Erfindung eine hochgenaue Drehwinkelerfassungsvorrichtung erzielt werden kann. Wenn
bei dem herkömmlichen Beispiel wie in dieser Ausführungsform der Wellenwinkelmultiplikator 5 beträgt, handelt es sich bei der Anzahl der Zähne 3 um 20. Hingegen ist die Drehwinkelerfassungsvorrichtung nach der
vierten Ausführungsform der vorliegenden Erfindung so ausgeführt, dass es sich bei der Anzahl der Zähne
3 um 16 handelt, was weniger ist als 20. Mit anderen Worten ist die Drehwinkelerfassungsvorrichtung auch
dann, wenn der Wellenwinkelmultiplikator größer wird, mit einer geringeren Anzahl von Zähnen 3 aufgebaut
als in dem herkömmlichen Beispiel, was insofern eine Wirkung hervorruft, als der Aufbau ausgezeichnet in der
Wicklungsbearbeitbarkeit und für Massenproduktion geeignet ist.
Fünfte Ausführungsform
[0126] Fig. 24 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
fünften Ausführungsform der vorliegenden Erfindung darstellt.
[0127] Die Drehwinkelerfassungsvorrichtung nach der fünften Ausführungsform der vorliegenden Erfindung
umfasst einen Stator 1, der mit Zähnen 3 und Wicklungen 4 versehen ist, die um die Zähne 3 gewickelt sind,
und einen Rotor 2 mit Schenkelpolen. Der einfachen Darstellung halber stellt Fig. 24 nur Hauptteile der Drehwinkelerfassungsvorrichtung dar und lässt Details davon weg, wie etwa ein Isolierteil zwischen der Wicklung
4 und dem Zahn 3, und einen Verbindungsdraht und einen Anschluss der Wicklung 4.
[0128] Die Drehwinkelerfassungsvorrichtung nach der fünften Ausführungsform der vorliegenden Erfindung
ist ein Beispiel, bei dem es sich bei der Anzahl der Zähne 3 um 10 handelt und der Wellenwinkelmultiplikator 7
beträgt (die Anzahl der Schenkelpole des Rotors 2 beträgt 7). Die den Zahnabschnitten gegebenen Nummern
sind Zahnnummern der Zähne 3, die aus praktischen Gründen vergeben wurden.
[0129] Ein Funktionsprinzip der Vorrichtung als Drehwinkelerfassungsvorrichtung ist dasselbe wie in der ersten Ausführungsform.
[0130] In dieser Ausführungsform beträgt eine Anzahl N von Erregerpolpaaren 5 und eine Anzahl M von
Schenkelpolen des Rotors 2 beträgt 7. Deshalb beträgt ein Wert |(Anzahl von Erregerpolpaaren) ± (Wellenwinkelmultiplikator)|, d. h. ein Wert |N ± M|, 2 oder 12, und von daher braucht unter den im Spalt erzeugten
Magnetflüssen nur eine Komponente einer 2. räumlichen Ordnung oder 12. räumlichen Ordnung in den Ausgangswicklungen erfasst zu werden. Darüber hinaus braucht nur eine Komponente einer Ordnung hinzuaddiert zu werden, die es ermöglicht, dass der größte Wert der Anzahl von Windungen kleiner ausgelegt werden
kann als im herkömmlichen Fall, bei dem die Anzahl von Windungen je nach der Sinuswelle variiert. In dieser
Ausführungsform wird ein Fall betrachtet, bei dem eine Komponente der 2. räumlichen Ordnung erfasst wird.
Eine Ordnung L der hinzuzuaddierenden Komponente wird auf 6 gesetzt, was sich von den Werten in den
vorstehend erwähnten Ausführungsformen unterschiedet. Dabei werden die Anzahlen von Windungen in den
Ausdrücken (12) und (13) ausgedrückt.
15/46
DE 11 2009 001 282 B4 2013.06.06
[Ausdruck 7]
[0131] Ncos(3) = Ncos(4) wird gelöst, vorausgesetzt, dass NS = 10, N1 = 100, θ1 = θ2 = 0 und η1 = η2 = 216°
ist, und was das Doppelzeichen betrifft, Plus in Ausdruck (12) verwendet wird, während Minus in Ausdruck
(13) verwendet wird, und N2/N1 wird erhalten. Die Anzahlen von Windungen sind in diesem Fall wie in Fig. 25
dargestellt. Darüber hinaus sind die Anzahlen von Windungen in Fig. 26 veranschaulicht, wobei die Abszissenachse die Zahnnummer und die Ordinatenachse die Anzahl von Windungen darstellt. Dezimalzahlen können
als Ausdruck für die Anzahl von Windungen angenommen werden. In einem Fall, bei dem die Anzahl von
Windungen als Dezimalzahl ausgedrückt ist, wird die Wicklung 4 nicht mit einer Windung um den Zahn 3 gewickelt, sondern der Wicklungsvorgang für die Wicklung 4 kann statt dessen zum Beispiel auf halbem Wege
zu einem benachbarten Zahn 3 übergehen. Im herkömmlichen Beispiel ist der größte Wert der Anzahl von
Windungen gleich N1, d. h. 100, aber bei der Drehwinkelerfassungsvorrichtung nach der fünften Ausführungsform ist der größte Wert der Anzahl von Windungen der Ausgangswicklung 88, was zeigt, dass eine Senkung
von 12% erfolgt ist. Fig. 27 stellt Werte dar, die erhalten werden, indem die in Fig. 25 dargestellten Anzahlen
von Windungen gerundet werden. Es erübrigt sich zu erwähnen, dass die Vorrichtung auch in einem solchen
Fall, bei dem die Anzahl von Windungen als ganze Zahl ausgedrückt ist, als Drehwinkelerfassungsvorrichtung
funktioniert. Darüber hinaus wird insofern eine Wirkung hervorgerufen, als die Auslegung einfach ist, weil die
Anzahl von Windungen als ganze Zahl ausgedrückt ist.
[0132] Entsprechend den Anzahlen von Windungen der in Fig. 25 bis Fig. 27 dargestellten Wicklungen 4,
betragen die Anzahlen von Windungen der COS-Wicklungen bei den Zahnnummern 2 und 7 Null. Es erübrigt
sich, zu erwähnen, dass, wenn solch ein Zahn 3 vorhanden ist, bei dem die Anzahl von Windungen Null beträgt, eine Wirkung der Steigerung de Wirkungsgrads der Wicklungsarbeit erzielt wird, weil der Zahn 3 keines
Wicklungsvorgangs für die Wicklung 4 mit der Wickelmaschine bedarf.
[0133] Fig. 28 ist eine grafische Darstellung von Spannungen der Ausgangswicklungen in der technischen
Wicklungsauslegung der fünften Ausführungsform. Die Abszissenachse stellt einen Drehwinkel als mechanischen Winkel und die Ordinatenachse einen Scheitelwert der Spannung dar. Plus- und Minuszeichen der
Spannung stellen eine Phasendifferenz dar. Bei sowohl der COS-Wicklung als auch der SIN-Wicklung ist eine Sinuswelle mit einem mechanischen Winkel von 360°/7 ≈ 51,4° erzielt, der als eine Periode angesetzt ist.
Darüber hinaus beträgt die Phasenverschiebung 360°/28 = 12,6°. Mit anderen Worten handelt es sich bei der
Phasendifferenz zwischen der COS-Wicklung und der SIN-Wicklung um einen elektrischen Winkel von 90°.
Dies bedeutet, dass die Vorrichtung als eine Drehwinkelerfassungsvorrichtung funktioniert, bei der der Wellenwinkelmultiplikator 7 beträgt. Bei den in Fig. 28 dargestellten Wellenformen handelt es sich um sinusförmige Wellenverläufe, die kaum höhere Oberschwingungen enthalten, und von daher zeigt sich auch, dass insofern eine Wirkung hervorgerufen wird, als nach der vorliegenden Erfindung eine hochgenaue Drehwinkelerfassungsvorrichtung erzielt werden kann. In dem herkömmlichen Beispiel mit demselben Aufbau wie in dieser
Ausführungsform, bei der der Wellenwinkelmultiplikator 7 beträgt, handelt es sich bei der Anzahl der Zähne 3
um 28. Hingegen ist die Drehwinkelerfassungsvorrichtung nach der fünften Ausführungsform der vorliegenden
Erfindung so ausgeführt, dass die Anzahl der Zähne 3 10 beträgt, was viel weniger ist als 28. Mit anderen
Worten ist die Drehwinkelerfassungsvorrichtung auch dann, wenn der Wellenwinkelmultiplikator größer wird,
mit einer geringeren Anzahl von Zähnen 3 aufgebaut als in dem herkömmlichen Beispiel, was insofern eine
Wirkung hervorruft, als der Aufbau ausgezeichnet in der Wicklungsbearbeitbarkeit und für Massenproduktion
geeignet ist.
Sechste Ausführungsform
[0134] Fig. 29 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
sechsten Ausführungsform der vorliegenden Erfindung darstellt.
16/46
DE 11 2009 001 282 B4 2013.06.06
[0135] Die Drehwinkelerfassungsvorrichtung nach der sechsten Ausführungsform der vorliegenden Erfindung
umfasst einen Stator 1, der mit Zähnen 3 und Wicklungen 4 versehen ist, die um die Zähne 3 gewickelt sind,
und einen Rotor 2 mit Schenkelpolen. Der einfachen Darstellung halber stellt Fig. 29 nur Hauptteile der Drehwinkelerfassungsvorrichtung dar und lässt Details davon weg, wie etwa ein Isolierteil zwischen der Wicklung
4 und dem Zahn 3, und einen Verbindungsdraht und einen Anschluss der Wicklung 4.
[0136] Die Drehwinkelerfassungsvorrichtung nach der sechsten Ausführungsform der vorliegenden Erfindung
ist ein Beispiel, bei dem es sich bei der Anzahl der Zähne 3 um 12 handelt und der Wellenwinkelmultiplikator 7
beträgt (die Anzahl der Schenkelpole des Rotors 2 beträgt 7). Die den Zahnabschnitten gegebenen Nummern
sind Zahnnummern der Zähne 3, die aus praktischen Gründen vergeben wurden.
[0137] Ein Funktionsprinzip der Vorrichtung als Drehwinkelerfassungsvorrichtung ist dasselbe wie in der ersten Ausführungsform.
[0138] In dieser Ausführungsform beträgt eine Anzahl N von Erregerpolpaaren 6 und eine Anzahl M von
Schenkelpolen des Rotors beträgt 7. Deshalb beträgt ein Wert |(Anzahl von Erregerpolpaaren) ± (Wellenwinkelmultiplikator)|, d. h. ein Wert |N ± M|, 1 oder 13 und von daher braucht unter den im Spalt erzeugten Magnetflüssen nur eine Komponente einer 1. räumlichen Ordnung oder 13. räumlichen Ordnung in den Ausgangswicklungen erfasst zu werden.
[0139] Darüber hinaus braucht nur eine Komponente einer Ordnung hinzuaddiert zu werden, die es ermöglicht,
dass der größte Wert der Anzahl von Windungen kleiner ausgelegt werden kann als im herkömmlichen Fall,
bei dem die Anzahl von Windungen der Wicklung je nach der Sinuswelle variiert. In dieser Ausführungsform
wird ein Fall betrachtet, bei dem eine Komponente der ersten räumlichen Ordnung erfasst wird. Eine Ordnung
L der hinzuzuaddierenden Komponente wird auf 3 gesetzt.
[0140] Dabei werden, ähnlich der zweiten Ausführungsform, die Anzahlen von Windungen in den Ausdrücken
(10) und (11) ausgedrückt. Ncos(1) = Ncos(2) wird gelöst, vorausgesetzt, dass NS = 12, N1 = 100, θ1 = θ2 = 0 und
η1 = η2 = 210° ist, und was das Doppelzeichen betrifft, Plus in Ausdruck (10) verwendet wird, während Minus in
Ausdruck (11) verwendet wird, und N2/N1 erhalten wird. Die Anzahlen von Windungen sind in diesem Fall wie
in Fig. 30 dargestellt. Darüber hinaus sind die Anzahlen von Windungen in Fig. 31 veranschaulicht, wobei die
Abszissenachse die Zahnnummer und die Ordinatenachse die Anzahl von Windungen darstellt. Dezimalzahlen
können als Ausdruck für die Anzahl von Windungen angenommen werden. In einem Fall, bei dem die Anzahl
von Windungen als Dezimalzahl ausgedrückt ist, wird die Wicklung 4 nicht mit einer Windung um den Zahn 3
gewickelt, sondern der Wicklungsvorgang für die Wicklung 4 kann statt dessen zum Beispiel auf halbem Wege
zu einem benachbarten Zahn 3 übergehen.
[0141] Im herkömmlichen Beispiel ist der größte Wert der Anzahl von Windungen gleich N1, d. h. 100, aber
bei der Drehwinkelerfassungsvorrichtung nach der sechsten Ausführungsform der vorliegenden Erfindung ist
der größte Wert der Anzahl von Windungen der Ausgangswicklung 84, was zeigt, dass eine Senkung von 16%
erfolgt ist.
[0142] Fig. 32 stellt Werte dar, die erhalten werden, indem die in Fig. 30 dargestellten Anzahlen von Windungen gerundet werden. Es erübrigt sich zu erwähnen, dass die Vorrichtung auch in einem solchen Fall, bei dem
die Anzahl von Windungen als ganze Zahl ausgedrückt ist, als Drehwinkelerfassungsvorrichtung funktioniert.
Darüber hinaus wird insofern eine Wirkung hervorgerufen, als die Auslegung einfach ist, weil die Anzahl von
Windungen als ganze Zahl ausgedrückt ist.
[0143] Fig. 33 ist eine grafische Darstellung von Spannungen der Ausgangswicklungen in der technischen
Wicklungsauslegung der sechsten Ausführungsform. Die Abszissenachse stellt einen Drehwinkel als mechanischen Winkel dar. Die Ordinatenachse stellt einen Scheitelwert der Spannung dar. Ähnlich der fünften Ausführungsform zeigt diese Figur, dass die Vorrichtung als Drehwinkelerfassungsvorrichtung funktioniert, bei der
der Wellenwinkelmultiplikator 7 beträgt. Bei den in Fig. 33 dargestellten Wellenformen handelt es sich um sinusförmige Wellenverläufe, die kaum höhere Oberschwingungen enthalten, und von daher zeigt sich auch,
dass insofern eine Wirkung hervorgerufen wird, als nach der vorliegenden Erfindung eine hochgenaue Drehwinkelerfassungsvorrichtung erzielt werden kann.
[0144] Im herkömmlichen Beispiel mit demselben Aufbau wie in dieser Ausführungsform, in dem der Wellenwinkelmultiplikator 7 beträgt, handelt es sich bei der Anzahl der Zähne 3 um 28. Hingegen ist die Drehwinkelerfassungsvorrichtung nach der sechsten Ausführungsform der vorliegenden Erfindung so ausgeführt, dass
17/46
DE 11 2009 001 282 B4 2013.06.06
die Anzahl der Zähne 3 12 beträgt, was viel weniger ist als 28. Mit anderen Worten ist die Drehwinkelerfassungsvorrichtung auch dann, wenn der Wellenwinkelmultiplikator größer wird, mit einer geringeren Anzahl von
Zähnen 3 ausgeführt als in dem herkömmlichen Beispiel, was insofern eine Wirkung hervorruft, als der Aufbau
ausgezeichnet in der Wicklungsbearbeitbarkeit und für Massenproduktion geeignet ist.
Siebte Ausführungsform
[0145] Fig. 34 ist eine Aufbauansicht, die einen Aufbau einer Drehwinkelerfassungsvorrichtung nach einer
siebten Ausführungsform der vorliegenden Erfindung darstellt.
[0146] Die Drehwinkelerfassungsvorrichtung nach der siebten Ausführungsform der vorliegenden Erfindung
umfasst einen Stator 1, der mit Zähnen 3 und Wicklungen 4 versehen ist, die um die Zähne 3 gewickelt sind,
und einen Rotor 2 mit Schenkelpolen. Der einfachen Darstellung halber stellt Fig. 34 nur Hauptteile der Drehwinkelerfassungsvorrichtung dar und lässt Details davon weg, wie etwa ein Isolierteil zwischen der Wicklung
4 und dem Zahn 3, und einen Verbindungsdraht und einen Anschluss der Wicklung 4.
[0147] Die Drehwinkelerfassungsvorrichtung nach der siebten Ausführungsform der vorliegenden Erfindung
ist ein Beispiel, bei dem es sich bei der Anzahl der Zähne 3 um 16 handelt und der Wellenwinkelmultiplikator 7
beträgt (die Anzahl der Schenkelpole des Rotors 2 beträgt 7). Die den Zahnabschnitten gegebenen Nummern
sind Zahnnummern der Zähne 3, die aus praktischen Gründen vergeben wurden.
[0148] Ein Funktionsprinzip der Vorrichtung als Drehwinkelerfassungsvorrichtung ist dasselbe wie in der ersten Ausführungsform.
[0149] In dieser Ausführungsform beträgt eine Anzahl N von Erregerpolpaaren 8 und eine Anzahl M von
Schenkelpolen des Rotors beträgt 7. Deshalb beträgt ein Wert |(Anzahl von Erregerpolpaaren) ± (Wellenwinkelmultiplikator)|, d. h. ein Wert |N ± M|, 1 oder 15, und von daher wird unter den im Spalt erzeugten Magnetflüssen eine Komponente einer 1. räumlichen Ordnung oder 15. räumlichen Ordnung in den Ausgangswicklungen erfasst. Darüber hinaus braucht nur eine Komponente einer Ordnung hinzuaddiert zu werden, die es
ermöglicht, dass der größte Wert der Anzahl von Windungen kleiner ausgelegt werden kann als im herkömmlichen Fall, bei dem die Anzahl von Windungen sinusförmig variiert. In dieser Ausführungsform wird ein Fall
betrachtet, bei dem eine Komponente der ersten räumlichen Ordnung erfasst wird. Eine Ordnung L der hinzuzuaddierenden Komponente wird auf 3 gesetzt.
[0150] Dabei werden, ähnlich der zweiten Ausführungsform, die Anzahlen von Windungen in den Ausdrücken
(10) und (11) ausgedrückt. N2/N1 wird erhalten, wenn Ncos(1) = Ncos(2) aufgestellt wird, vorausgesetzt, dass
NS = 12, N1 = 100, θ1 = θ2 = 0 und η1 = η2 = 210° ist, und was das Doppelzeichen betrifft, Plus in Ausdruck (10)
verwendet wird, während Minus in Ausdruck (11) verwendet wird. Die Anzahlen von Windungen sind in diesem
Fall wie in Fig. 35 dargestellt. Darüber hinaus sind die Anzahlen von Windungen in Fig. 36 veranschaulicht,
wobei die Abszissenachse die Zahnnummer und die Ordinatenachse die Anzahl von Windungen darstellt. Dezimalzahlen können als Ausdruck für die Anzahl von Windungen angenommen werden. In einem Fall, bei dem
die Anzahl von Windungen als Dezimalzahl ausgedrückt ist, wird die Wicklung 4 nicht mit einer Windung um
den Zahn 3 gewickelt, sondern der Wicklungsvorgang für die Wicklung 4 kann statt dessen zum Beispiel auf
halbem Wege zu einem benachbarten Zahn 3 übergehen. Im herkömmlichen Beispiel ist der größte Wert der
Anzahl von Windungen gleich N1, d. h. 100, aber bei der Drehwinkelerfassungsvorrichtung nach der siebten
Ausführungsform der vorliegenden Erfindung ist der größte Wert der Anzahl von Windungen der Ausgangswicklung 88, was zeigt, dass eine Senkung von 12% erfolgt ist.
[0151] Fig. 37 stellt Werte dar, die erhalten werden, indem die in Fig. 35 dargestellten Anzahlen von Windungen gerundet werden. Es erübrigt sich zu erwähnen, dass die Vorrichtung auch in einem solchen Fall, bei dem
die Anzahl von Windungen als ganze Zahl ausgedrückt ist, als Drehwinkelerfassungsvorrichtung funktioniert.
Darüber hinaus wird insofern eine Wirkung hervorgerufen, als die Auslegung einfach ist, weil die Anzahl von
Windungen als ganze Zahl ausgedrückt ist.
[0152] Fig. 38 ist eine grafische Darstellung von Spannungen der Ausgangswicklungen in der technischen
Wicklungsauslegung der siebten Ausführungsform der vorliegenden Erfindung. In Fig. 38 stellt die Abszissenachse einen Drehwinkel als mechanischen Winkel und die Ordinatenachse einen Scheitelwert der Spannung
dar. Ähnlich der sechsten Ausführungsform zeigt diese Figur, dass die Vorrichtung als Drehwinkelerfassungsvorrichtung funktioniert, bei der der Wellenwinkelmultiplikator 7 beträgt. Bei den in Fig. 38 dargestellten Wellenformen handelt es sich um sinusförmige Wellenverläufe, die kaum höhere Oberschwingungen enthalten,
18/46
DE 11 2009 001 282 B4 2013.06.06
und von daher zeigt sich auch, dass insofern eine Wirkung hervorgerufen wird, als nach der vorliegenden Erfindung eine hochgenaue Drehwinkelerfassungsvorrichtung erzielt werden kann.
[0153] Darüber hinaus handelt es sich in dem herkömmlichen Beispiel mit demselben Aufbau wie in dieser
Ausführungsform, bei dem der Wellenwinkelmultiplikator 7 beträgt, bei der Anzahl der Zähne 3 um 28. Hingegen ist die Drehwinkelerfassungsvorrichtung nach der siebten Ausführungsform der vorliegenden Erfindung
so ausgeführt, dass die Anzahl der Zähne 3 16 beträgt, was viel weniger ist als 28. Mit anderen Worten ist die
Drehwinkelerfassungsvorrichtung auch dann, wenn der Wellenwinkelmultiplikator größer wird, mit einer geringeren Anzahl von Zähnen 3 aufgebaut als in dem herkömmlichen Beispiel, was insofern eine Wirkung hervorruft, als der Aufbau ausgezeichnet in der Wicklungsbearbeitbarkeit und für Massenproduktion geeignet ist.
[0154] Anzumerken wäre, dass die Anzahl von Windungen der Erregerwicklung bei jedem der Zähne 3 in den
vorstehend erwähnten Ausführungsformen eins bis sieben 50 beträgt, die vorliegende Erfindung aber nicht
darauf beschränkt ist, und die Anzahl von Windungen der Erregerwicklung auch angemessen nach Bedarf je
nach den elektrischen Eigenschaften wie etwa der Eingangsimpedanz angesetzt werden kann.
[0155] Darüber hinaus können die Parameter N1 und N2 je nach einem Transformationsverhältnis o. dgl. angemessen angesetzt werden.
[0156] Darüber hinaus erfolgte die Beschreibung nur für eine Drehwinkelerfassungsvorrichtung, bei der der
Wellenwinkelmultiplikator 4, 5 oder 7 beträgt; die vorliegende Erfindung ist aber nicht darauf beschränkt, sondern es lässt sich auch eine Drehwinkelerfassungsvorrichtung mit demselben Gedanken aufbauen, bei der der
Wellenwinkelmultiplikator 1, 2, 3, 6, 8 oder mehr beträgt.
Achte Ausführungsform
[0157] Fig. 39 ist eine Konzeptansicht einer elektrischen Servolenkungsvorrichtung für ein Fahrzeug mit der
darin eingebauten Drehwinkelerfassungsvorrichtung nach der achten Ausführungsform.
[0158] Zuerst erfolgt eine Beschreibung einer elektrischen Servolenkungsvorrichtung für ein Fahrzeug.
[0159] Die elektrische Servolenkungsvorrichtung für ein Fahrzeug umfasst eine Lenksäulenwelle 31, um eine
Lenkkraft von einem Lenkrad 30 zu übertragen. Ein Schneckengetriebe 32 (Details von diesem sind in Fig. 41
weggelassen und es ist nur ein Getriebegehäuse dargestellt) ist mit der Lenksäulenwelle 31 verbunden, die eine Leistung (Drehmoment und U/min) eines von einem Steuergerät 33 gesteuerten Motors 34 überträgt, wobei
eine Drehrichtung um 90° verändert und die Drehung verlangsamt wird, um dadurch ein Unterstützungsdrehmoment zu verstärken. Ein Griffgelenk 35 ist mit dem Schneckengetriebe 32 verbunden, über das die Lenkkraft
übertragen und dabei dessen Richtung verändert wird. Ein Lenkgetriebe 36 (Details von diesem sind in Fig. 41
weggelassen und es ist nur ein Getriebegehäuse dargestellt) ist mit dem Griffgelenk 35 verbunden, das die
Drehung der Lenksäulenwelle 31 verlangsamt und die Drehung in eine lineare Bewegung einer Zahnstange
37 verwandelt, um dadurch eine erforderliche Verlagerung zu erzielen. Durch die lineare Bewegung der Zahnstange 37 werden Räder bewegt, um ein Fahrzeug eine Richtungsänderung oder einen anderen derartigen
Vorgang durchführen zu lassen.
[0160] Bei der wie vorstehend beschriebenen elektrischen Servolenkungsvorrichtung wird eine im Motor 34
auftretende Drehmomentpulsierung über eine Vermittlung des Schneckengetriebes 32 und der Lenksäulenwelle 31 auf das Lenkrad übertragen. Deshalb kann kein ruckfreies Lenkgefühl erzielt werden, wenn eine starke Drehmomentpulsierung im Motor 34 auftritt. Ferner kann, auch wenn der Motor in einem Zustand ist, in dem
kein Unterstützungsdrehmoment erzeugt wird, kein ruckfreies Lenkgefühl erzielt werden, wenn der Motor ein
hohes pulsierendes Drehmoment erzeugt.
[0161] Darüber hinaus ist dann, wenn es sich bei dem Motor 34 um einen bürstenlosen Motor handelt, eine
Einrichtung zum Erfassen eines Drehwinkels eines Rotors notwendig.
[0162] Fig. 40 ist eine Aufbauansicht, die ein Beispiel eines Aufbaus des bürstenlosen Motors darstellt. Der
einfachen Darstellung halber veranschaulicht Fig. 40 nur dessen Hauptbestandteile.
[0163] Ein Statorkern 21 ist durch Aufpressen, Aufschrumpfen oder mit einem Klebstoff an einem Rahmen 20
befestigt. Eine Ankerwicklung 22 ist um den Statorkern 21 gewickelt, und wenn der Ankerwicklung 22 Strom
zugeführt wird, entsteht ein Drehmoment. Ein Rotor umfasst einen Rotorkern 23 und einen Permanentmagne-
19/46
DE 11 2009 001 282 B4 2013.06.06
ten 24. Eine Welle 25 ist in den Rotokern 23 eingepresst und durch Lager 26a und 26b frei drehend gelagert.
Die Welle 25 kann aus einem anderen Werkstoff gebildet sein als der Rotorkern 23, oder kann aus demselben
Werkstoff gebildet sein wie der Rotorkern 23. Der Rahmen 20 ist an einem Gehäuse 27 befestigt. Ein Stator
200 der Drehwinkelerfassungsvorrichtung ist am Gehäuse 27 befestigt, und eine Wicklung 201 ist um den
Stator 200 gewickelt. Ein Rotor 202 ist durch Aufpressen oder ein anderes derartiges Verfahren an der Welle
25 befestigt.
[0164] Auf Grundlage eines von der Drehwinkelerfassungsvorrichtung erfassten Winkels des Rotors 202 wird
der Ankerwicklung 22 des Motors Strom zugeführt. Wenn die Erfassungsgenauigkeit des Winkels gering ist,
verschiebt sich die Phase und entsprechend tritt das Drehmomentpulsieren auf, was zu einem schlechten
Lenkgefühl führt.
[0165] Darüber hinaus ist es vom Montagegesichtspunkt her erwünscht, dass die Drehwinkelerfassungsvorrichtung kleiner ist als der Motor. Zum Beispiel sollte ein Außendurchmesser von dieser die Hälfte oder weniger
des Außendurchmessers des Motors betragen, wie in Fig. 40 dargestellt ist. Wenn der Außendurchmesser
kleiner wird, wird natürlich auch ein Innendurchmesser des Stators 200 der Drehwinkelerfassungsvorrichtung
kleiner. Wenn die Anzahl der Zähne 3 der Drehwinkelerfassungsvorrichtung zunimmt, werden Zwischenräume
zwischen den Zähnen 3 enger, mit dem Ergebnis, dass die Schlitze zur Aufnahme von Wicklungen 4 enger
werden. Die Düse der Wickelmaschine ist schwer einzuführen, und von daher ist der Aufbau in der Wickelbearbeitbarkeit schlechter und nicht für Massenproduktion geeignet. Wenn der Außendurchmesser (Durchmesser) des Motors zum Beispiel 80 mm beträgt, beträgt der Außendurchmesser (Durchmesser) der Drehwinkelerfassungsvorrichtung 40 mm, und der Innendurchmesser des Stators 200 beträgt ca. 20 mm, wobei es sich
um einen weiteren halbierten Wert handelt. Wenn es sich bei der Anzahl der Zähne 3 um 20 handelt, sind die
Zwischenräume zwischen den Zähnen jeweils ungefähr nur 3 mm groß.
[0166] Wird jedoch die Drehwinkelerfassungsvorrichtung nach der vorliegenden Erfindung verwendet, handelt
es sich selbst in einem Beispiel, bei dem der Wellenwinkelmultiplikator 4, 5 oder 7 beträgt, bei der Anzahl der
Zähne 3 um 16 oder weniger, und kann darüber hinaus 12, 10 oder 8 betragen. Dementsprechend kann der
Motor, weil der Wellenwinkelmultiplikator in vielen Fällen gleich der Anzahl von Polpaaren des Motors ausgelegt ist, mit 8 Polen, 10 Polen oder 14 Polen angetrieben und eine in Massenproduktivität ausgezeichnete elektrische Servolenkungsvorrichtung bereitgestellt werden. Ein mehrpoliger Motor mit konzentrierten Wicklungen,
z. B. ein Motor mit 8 Polen und 12 Schlitzen, 10 Polen und 12 Schlitzen, oder 14 Polen und 12 Schlitzen,
kann mit einer niedrigen Drehmomentpulsierung ausgelegt werden, und von daher führt die Fähigkeit, einen
derartigen Motor anzutreiben, zu einer elektrischen Servolenkungsvorrichtung, die ein gutes Lenkgefühl bietet.
[0167] Wenn die Drehwinkelerfassungsvorrichtung nach der vorliegenden Erfindung zum Erfassen des Drehwinkels des Permanentmagnetmotors, der in einer elektrischen Servolenkungsvorrichtung für ein Fahrzeug
eingebaut ist, verwendet wird, kann die Anzahl der Zähne 3 mit 16 oder weniger angesetzt werden.
[0168] Darüber hinaus kann die Anzahl der Zähne 3 kleiner als die Anzahl ausgelegt werden, die erhalten
wird, wenn der Wellenwinkelmultiplikator mit 4 multipliziert wird. Dementsprechend kann der mehrpolige Motor
mit 8 Polen, 10 Polen oder 14 Polen angetrieben werden, und von daher kann das Drehmomentpulsieren des
Permanentmagnetmotors reduziert werden. Als Ergebnis wird bei der elektrischen Servolenkungsvorrichtung
eine Wirkung eines besseren Lenkgefühls hervorgerufen.
[0169] Darüber hinaus hat die Drehwinkelerfassungsvorrichtung nach der vorliegenden Erfindung einen zur
Massenproduktion geeigneten Aufbau.
[0170] Darüber hinaus wird eine Wirkung eines weiteren Bereichs für die Auswahl des Wellenwinkelmultiplikators, d. h. eines weiteren Bereichs für die Auswahl der Anzahl von Polen des Motors hervorgerufen.
Patentansprüche
1. Drehwinkelerfassungsvorrichtung, Folgendes aufweisend:
einen Stator (1), der aus einem Eisenkern mit Zähnen (3) gebildet ist, wobei der Stator (1) aufweist:
eine Erregerwicklung (4) einer oder mehrerer Phase/n; und
Ausgangswicklungen (4) zweier oder mehrerer Phasen; und
einen Rotor (2) mit einem Schenkelpol,
wobei die Anzahlen von Windungen der Ausgangswicklungen (4) jeweils einen Wert haben, der durch eine
Funktion erhalten wird, die eine Summe oder Differenz zwischen einer Sinuswelle einer räumlichen Ordnung
20/46
DE 11 2009 001 282 B4 2013.06.06
enthält, die gleich einem Absolutwert einer Summe einer Anzahl M von Schenkelpolen und einer Anzahl N
von Erregerpolpaaren ist, und einer Sinuswelle einer Ordnung, die gleich einer ganzen Zahl L ist, die sich von
einem Absolutwert der Anzahl N von Erregerpolpaaren und einem Absolutwert einer Differenz unterscheidet,
die erhalten wird, indem die Anzahl M von Schenkelpolen von der Anzahl N von Polpaaren subtrahiert wird.
2. Drehwinkelerfassungsvorrichtung, Folgendes aufweisend:
einen Stator (1), der aus einem Eisenkern mit Zähnen (3) gebildet ist, wobei der Stator (1) aufweist:
eine Erregerwicklung (4) einer oder mehrerer Phase/n; und
Ausgangswicklungen (4) zweier oder mehrerer Phasen; und
einen Rotor (2) mit einem Schenkelpol,
wobei die Anzahlen von Windungen der Ausgangswicklungen (4) jeweils einen Wert haben, der durch eine
Funktion erhalten wird, die eine Summe oder Differenz zwischen einer Sinuswelle einer Ordnung enthält, die
gleich einem Absolutwert einer Differenz ist, die erhalten wird, indem eine Anzahl M von Schenkelpolen von
einer Anzahl N von Erregerpolpaaren subtrahiert wird, und einer Sinuswelle mit einer Ordnung, die gleich einer
ganzen Zahl L ist, die sich von einem Absolutwert der Anzahl N von Erregerpolpaaren und einem Absolutwert
einer Summe der Anzahl M von Schenkelpolen und der Anzahl N von Polpaaren unterscheidet.
3. Drehwinkelerfassungsvorrichtung nach Anspruch 1, wobei Anzahlen von Windungen Ncos(i) und Nsin(i),
worin i eine ganze Zahl ausgehend von 1 bis zu einer Anzahl NS von Zähnen (3) der Ausgangswicklungen (4)
der beiden Phasen ist, die um einen i-ten Zahn (3) gewickelt sind, wie folgt ausgedrückt werden:
[Ausdruck 8]
worin N eine Anzahl von Erregerpolpaaren darstellt, M eine Anzahl der Schenkelpole des Rotor (2) darstellt,
L eine ganze Zahl darstellt, die sich vom Absolutwert der Anzahl von Polpaaren der Erregerwicklung (4) und
vom Absolutwert der Differenz unterscheidet, die erhalten wird, indem die Anzahl der Schenkelpole von der
Anzahl von Polpaaren subtrahiert wird, und N1; N2, θ1, θ2, η1 und η2 jeweils beliebige reelle Zahlen darstellen.
4. Drehwinkelerfassungsvorrichtung nach Anspruch 2, wobei Anzahlen von Windungen Ncos(i) und Nsin(i),
worin i eine ganze Zahl ausgehend von 1 bis zu einer Anzahl NS von Zähnen (3) der Ausgangswicklungen (4)
der beiden Phasen ist, die um einen i-ten Zahn (3) gewickelt sind, wie folgt ausgedrückt werden:
[Ausdruck 9]
worin N eine Anzahl von Erregerpolpaaren darstellt, M eine Anzahl der Schenkelpole des Rotor (2) darstellt,
L eine ganze Zahl darstellt, die sich vom Absolutwert der Anzahl von Polpaaren der Erregerwicklung (4) und
vom Absolutwert der Summe der Anzahl der Schenkelpole und der Anzahl von Polpaaren unterscheidet, und
N1; N2, θ1, θ2, η1 und η2 jeweils beliebige reelle Zahlen darstellen.
21/46
DE 11 2009 001 282 B4 2013.06.06
5. Drehwinkelerfassungsvorrichtung nach Anspruch 1 oder 3, wobei ein Absolutwert der ganzen Zahl L
dreimal so groß ist wie der Absolutwert der Summe der Anzahl M der Schenkelpole und der Anzahl N von
Polpaaren.
6. Drehwinkelerfassungsvorrichtung nach Anspruch 2 oder 4, wobei ein Absolutwert der ganzen Zahl L
dreimal so groß ist wie der Absolutwert der Differenz, die erhalten wird, indem die Anzahl M der Schenkelpole
von der Anzahl N von Polpaaren subtrahiert wird.
7. Drehwinkelerfassungsvorrichtung nach Anspruch 1 oder 2, wobei mindestens einer der Zähne (3) nicht
mit den Ausgangswicklungen (4) der beiden Phasen umwickelt ist.
8. Drehwinkelerfassungsvorrichtung nach Anspruch 1 oder 2, wobei die Ausgangswicklungen (4) der beiden
Phasen, die dieselbe Anzahl von Windungen haben, um mindestens zwei der Zähne (3) gewickelt sind.
9. Drehwinkelerfassungsvorrichtung nach Anspruch 1 oder 2, wobei die Anzahlen von Windungen der Ausgangswicklungen (4) der beiden Phasen jeweils als eine ganze Zahl ausgedrückt sind.
10. Drehwinkelerfassungsvorrichtung nach einem der Ansprüche 1 bis 9, die einen Drehwinkel eines Permanentmagnetmotors erfasst, der in einer elektrischen Servolenkungsvorrichtung für ein Fahrzeug angebracht
ist, wobei die Anzahl der Zähne (3) 16 oder weniger beträgt.
11. Drehwinkelerfassungsvorrichtung nach einem der Ansprüche 3 oder 4, wobei ein Verhältnis N2/N1 der
Zahlen N2 und N1 erhalten wird indem die Gleichung
Ncos(j) = Ncos(j + 1)
gelöst wird, wobei j eine ganze Zahl zwischen 1 und der Anzahl NS der Zähne (3) ist.
Es folgen 24 Blatt Zeichnungen
22/46
DE 11 2009 001 282 B4 2013.06.06
Anhängende Zeichnungen
23/46
DE 11 2009 001 282 B4 2013.06.06
24/46
DE 11 2009 001 282 B4 2013.06.06
25/46
DE 11 2009 001 282 B4 2013.06.06
26/46
DE 11 2009 001 282 B4 2013.06.06
27/46
DE 11 2009 001 282 B4 2013.06.06
28/46
DE 11 2009 001 282 B4 2013.06.06
29/46
DE 11 2009 001 282 B4 2013.06.06
30/46
DE 11 2009 001 282 B4 2013.06.06
31/46
DE 11 2009 001 282 B4 2013.06.06
32/46
DE 11 2009 001 282 B4 2013.06.06
33/46
DE 11 2009 001 282 B4 2013.06.06
34/46
DE 11 2009 001 282 B4 2013.06.06
35/46
DE 11 2009 001 282 B4 2013.06.06
36/46
DE 11 2009 001 282 B4 2013.06.06
37/46
DE 11 2009 001 282 B4 2013.06.06
38/46
DE 11 2009 001 282 B4 2013.06.06
39/46
DE 11 2009 001 282 B4 2013.06.06
40/46
DE 11 2009 001 282 B4 2013.06.06
41/46
DE 11 2009 001 282 B4 2013.06.06
42/46
DE 11 2009 001 282 B4 2013.06.06
43/46
DE 11 2009 001 282 B4 2013.06.06
44/46
DE 11 2009 001 282 B4 2013.06.06
45/46
DE 11 2009 001 282 B4 2013.06.06
46/46