Projektarbeit - Emerging Attraction
Werbung

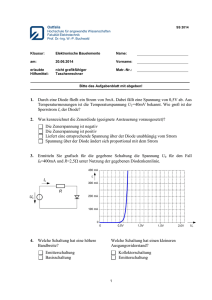
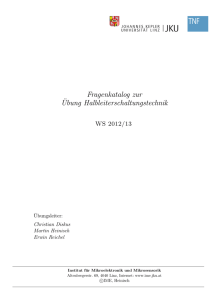
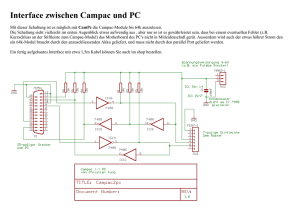
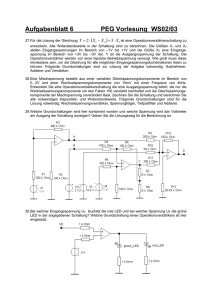
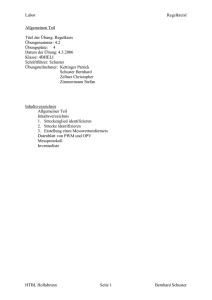
Projektarbeit Entwicklung des Leistungsteils eines Frequenzumrichters zur dq-Regelung eines Asynchronmotors Name, Vorname: Pek, Kevin Matrikelnummer: 530960 Studiengang: Elektrische Energiesystemtechnik Bearbeitungszeitraum: WS14/15 Inhaltsverzeichnis 1 Vorwort 3 2 Allgemeines 3 2.1 Frequenzumrichter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.2 dq-Regelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 Ausgangssituation 4 3.1 Prinzipschaltung des Antriebs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 3.2 Der Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 3.3 Ansteuerung und LTSpice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 3.3.1 Vorteile von PWM gegenüber Blockumrichtung . . . . . . . . . . . . . . . . . . . . . 5 3.3.2 PWM-Signal (einphasig und dreiphasig) 6 3.4 . . . . . . . . . . . . . . . . . . . . . . . . . Eagle - Einfach Anzuwendender Grascher Layout Editor 3.4.1 Eine neue Bibliothek in Eagle anlegen . . . . . . . . . . . . . . . . . . . . 9 . . . . . . . . . . . . . . . . . . . . . . . . . . 9 4 Konstruktion des Umrichters 11 4.1 Potentialgleichheit dank level-shift-function . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 4.2 Sicherheit durch shortcut-shutdown-function . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 4.3 General Application Circuit Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 4.3.1 Elektrolytkondensator || Kondensator || Z-Diode . . . . . . . . . . . . . . . . . . . . . 13 4.3.2 RC-Tiefpasslter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 4.4 Erweiterung der Schaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4.1 Galvanische Trennung durch Optokoppler 4.4.2 13 . . . . . . . . . . . . . . . . . . . . . . . . 13 Hardwareverriegelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 4.4.3 Endgültige Schaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 4.4.4 Stückliste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 5 Fortführung des Projekts 18 5.1 Platinenlayout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 5.2 Elektromagnetische Verträglichkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 5.3 Regelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 6 Fazit 19 2 1 Vorwort Diese Projektarbeit beschäftigt sich mit der Planung eines Frequenzumrichters zur dq-Regelung eines Drehstromasynchronmotors. Hierbei wird aufgrund des Umfangs möglichst kompakt die Herangehensweise an die Aufgabe erläutert und die Eigenschaften des Umrichters und der Ansteuerung erklärt. 2 Allgemeines In diesem Kapitel werden Grundlagen über Umrichter und die dq-Regelung erklärt. 2.1 Frequenzumrichter Ein Frequenzumrichter ist ein Gerät, welches eine Wechselspannung in eine Wechselspannung anderer Amplitude und/oder Frequenz umwandelt. Frequenzumrichter sind beispielsweise bei der Versorgung von elektrischen Maschinen von entscheidender Bedeutung, um der Maschine (oder im Falle eines Generators dem Netz) die richtige Spannung und Frequenz zu liefern. Auÿerdem wird heutzutage die Drehzahl elektrischer Drehstrommaschinen durch eine Änderung von Frequenz und Spannung herbeigeführt, was ebenfalls mit Umrichtern realisieren wird. Dabei unterscheidet man in erster Linie zwischen indirekten und direkten Umrichtern. Ein indirekter Umrichter besitzt im Gegensatz zu einem direkten Umrichter einen Gleichspannungs- oder Gleichstromzwischenkreis. Bei einem Gleichspannungszwischenkreis wird die Spannung mittels eines Kondensators konstant gehalten (auch U-Umrichter genannt), bei einem Gleichstromzwischenkreis wird der Strom mit Hilfe einer Induktivität konstant gehalten (I-Umrichter). Ein indirekter Umrichter ist im Prinzip eine Reihenschaltung von Gleichrichter und Wechselrichter. Die Gleichrichtung und die Wechselrichtung in einem Umrichter sind fast immer als Brückenschaltung ausgeführt. Auÿerdem unterscheidet man zwischen geregelten und gesteuerten Umrichtern. Eine Regelung ist dann sinnvoll, wenn eine Störgröÿe auftreten kann, beispielsweise ein unvorherbestimmtes Widerstandsmoment an der Welle des Asynchronmotors, wodurch sich eine andere Drehzahl einstellen würde. Dieses Projekt handelt von einem einem geregelten Spannungszwischenkreisumrichter. 2.2 dq-Regelung Eine besondere Form der Regelung eines Elektromotors ist die dq-Regelung, welche hochdynamisch Drehzahl und Moment regeln kann. Dabei werden aus den realen Wechselgröÿen der Maschine mittels der Clarke-ParkTransformation rotorfeste Gleichgröÿen gebildet. Zusammen mit den Daten eines Motorenmodells, welches aus den transformierten Strömen und aus der Zwischenkreisspannung die Drehzahl, den Fluss und den Rotorwinkel schätzt, werden diese Gleichgröÿen nach einem Soll-Istwert-Vergleich mittels der inversen Clarke-ParkTransformation in reale Gröÿen zurückgerechnet. Ein Motorenmodell bei Asynchronmotoren erweist sich komplexer als beispielsweise bei Synchronmotoren, da Asynchronmotoren sich nicht exakt mit mit dem Drehfeld des Ständers mitdrehen, sondern um eine Drehzahldierenz (Schlupf ) langsamer sind. Dieser Schlupf ist auÿerdem nicht konstant, sondern lastabhängig. 3 3 Ausgangssituation Der Umrichter soll einen Motor versorgen. Dieser bendet sich in einem Prüfstand zusammen mit einer Drehzahl-Drehmomenten-Messwelle und einer Bremse als Belastungseinheit (siehe Abbildung 1). Abbildung 1: Prüfstand mit Bremse, Messwelle und Motor 3.1 Prinzipschaltung des Antriebs Die Prinzipschaltung des Antriebs setzt sich wie folgt zusammen: Abbildung 2: Prinzipschaltung eines Antriebs Ein Gleichrichter liefert eine Gleichspannung, welche in einem Gleichspannungszwischenkreis konstant gehalten wird. Dies erfolgt mittels eines Elektrolytkondensators und gegebenenfalls eines zusätzlichen Folienkondensators. Der Elektrolytkondensator sorgt dafür, dass eine möglichst konstante Gleichspannung abgegeben werden kann, indem er den 300-Hz-Rippel der gleichgerichteten Spannung glättet. Der Folienkondensator hingegen sorgt lediglich für die Glättung und Filterung von Spannungsspitzen. Diese entstehen durch das schnelle Schalten des Wechselrichters, was zu einer Schaltüberspannung am Halbleiter führt. Deswegen ist es angebracht, den Folienkondensator so nah wie möglich an dem Wechselrichter zu platzieren. Im Wechselrichter erfolgt nun mittels einer Drehstrombrückenschaltung die dreiphasige Wechselrichtung der Gleichspannung. Es werden drei zeitliche Ströme gemessen (wahlweise auch nur zwei, da man den dritten nach der Knotenregel errechnen kann). Danach werden sie softwaretechnisch mittels der Clarke-Park-Transformation in einen d-Strom und einen q-Strom zerlegt. Dabei ist der q-Strom direkt proportional zum Drehmoment. Der d-Strom wird nur für die Feldschwächung benötigt. Diese hat zur Folge, dass die Drehzahl über die Nenndrehzahl hinaus erhöht werden kann. Da diese beiden Ströme Gleichgröÿen sind, können diese einfacher geregelt werden. Zusammen 4 mit einem Motorenmodell werden nach Soll-Istwert-Vergleichen für die q-Komponente und die d-Komponente diese beiden in einer Rücktransformation in reale Gröÿen zurückgerechnet. Diese sind Ausgangsbasis für die Ansteuerung des Wechselrichters. 3.2 Der Motor Bei dem zur Verfügung stehenden Motor handelt es sich um einen zweipoligen Drehstrom-Asynchronmotor vom Hersteller EMK Motoren mit der Bezeichnung EC FS 71 1-2. Die Daten des Motors können dem Ausschnitt des Datenblattes in Abbildung 3 entnommen werden: Abbildung 3: Auszug aus dem Datenblatt von EMK Motoren Für die Konstruktion des Umrichters sind insbesondere folgende Werte wichtig: Nennspannung Un (Dreieck/Stern): 230 V/400 V Nennstrom In : 900 mA Anlaufstrom Ia : 6,1 x In = 4,88 A Siehe dazu Abschnitt 4. 3.3 Ansteuerung und LTSpice Die Ansteuerung des Motors soll mittels Pulsweitenmodulation (PWM) erfolgen. Für die Simulationen wurde das Programm LTSpice von Programm kann unter Linear Technology verwendet, ein kostenloses Spice-basiertes Programm. Das http://www.linear.com/designtools/software/#LTspice/ heruntergeladen werden und kann analoge und digitale elektrische Schaltungen simulieren.. 3.3.1 Vorteile von PWM gegenüber Blockumrichtung Die PWM bietet gegenüber der Blockkommutierung folgende Vorteile: 1. Der Strom hat eine höhere Qualität bezüglich der Sinusform (geringerer Gehalt an Oberwellen). 2. Die Zwischenkreisgleichspannung muss nicht variabel sein und kann konstant gehalten werden. 5 Nachteile wären wiederum, dass aufgrund der höheren Taktrate und schnelleren Halbleiter höhere EMVProbleme entstehen und es zu einer höheren Geräuschentwicklung kommen kann. Motoren werden, je nach Gröÿe, mit Taktfrequenzen von 2,5 kHz bis 16,7 kHz angesteuert. Je gröÿer der Motor (bei gleicher Spannung), desto gröÿer sind die elektrischen Ströme, desto gröÿer die Leiterquerschnitte und dementsprechend kleiner die Induktivität, desto geringer die Taktfrequenz. Da es sich um einen recht kleinen Motor handelt, ist die PWM relativ hochfrequent und somit an der Grenze des für das menschliche Ohr hörbaren Bereiches. Auÿerdem ist eine PWM mit höheren Kosten verbunden. 3.3.2 PWM-Signal (einphasig und dreiphasig) Eine PWM kann im einfachsten Fall durch einen Vergleich eines Dreieck- und eines Sinussignals erzeugt werden. Dadurch wird jener Sinus in ein pulsweitenmoduliertes Signal zerlegt. Die Frequenz des Dreiecksignals entspricht der Frequenz der PWM. Bei einer Brückenschaltung (siehe Abbildung 4) mit vier Ventilen erzeugen jeweils zwei diagonal gegenüberliegende Ventile das PWM-Signal einer Halbwelle. Die jeweils anderen beiden Ventile werden invers dazu angesteuert, sprich wenn Ventil 1 und 4 leitend sind, sind Ventil 2 und 3 sperrend beziehunsweise anders herum. Abbildung 4: Ventilkennzeichnung in einer H-Brücke Abbildung 5 zeigt zur besseren Übersicht ein PWM-Signal mit nur 2 kHz. Im untersten Plot wird die Erzeugung eines Signals mittels einer Sinusfunktion und einer Dreiecksfunktion dargestellt und in den oberen beiden Plots zwei zueinander inverse PWM-Signale. 6 Abbildung 5: Modulation eines einphasigen PWM-Signals Es darf aber nicht passieren, dass ein Brückenkurzschluss auftritt, sprich das Oberschalter und Unterschalter gleichzeitig leitend sind. Im idealen Betrieb ist dies auch nicht der Fall. Da allerdings der Wechsel zwischen den Ventilpaaren gleichzeitig geschieht, könnte es aufgrund von Laufzeiten doch möglich sein, den Zwischenkreis kurzzuschlieÿen. Um dies zu verhindern, wird eine Totzeit zwischen den Steuersignalen von Oberschalter und Unterschalter eingefügt, sodass eine Pause während des Wechsels sicher gestellt werden kann. Bei IGBTs beträgt diese Totzeit in der Regel 500 ns bis 3 µs (siehe Abbildung 6, 7 und Abschnitt 4.4.2). Abbildung 6: PWM mit Totzeit 7 Abbildung 7: PWM mit Totzeit (vergröÿert) Um insgesamt ein dreiphasiges Signal zu erhalten, wird dieser Vorgang in einer Drehstrombrückenschaltung je 120° elektrisch versetzt wiederholt (siehe Abbildung 8). Hier sind nun in einem Plot die jeweilige Sinuskurve, der zugehörige Oberschalter und der zugehörige Unterschalter abgebildet. Abbildung 8: 3-phasige PWM mit Totzeit Aus diesen PWM-Signalen erhält man wiederum einen Sinus, wenn man hinter den Ausgang ein PT1-Glied schaltet, beispielsweise eine Induktivität L, um nach uL = L · diL dt das digitale Signal wieder zu analogisieren. Dies wäre bei dem ohmsch-induktiven Verhalten der Motorwicklungen schon der Fall und somit würden sie den Strom näherungsweise zu einer Sinusfunktion formen (siehe dazu Abbildung 9). 8 Abbildung 9: PT1-Verhalten der Motorwicklungen 3.4 Eagle - Einfach Anzuwendender Grascher Layout Editor Das Design der Platine für den Umrichter erfolgte über das Program Eagle von Cadsoft. Eagle ist ein Leiter- plattenentwicklungsprogramm und wie der Titel schon verrät einfach zu bedienen und selbsterklärend in den Grundfunktionen. Es erwies sich als umständlich, eine Bibliothek anzlegen, was im folgenden Abschnitt erklärt wird. Das Programm kann unter http://www.cadsoft.de/download-eagle/ heruntergeladen werden. 3.4.1 Eine neue Bibliothek in Eagle anlegen Auch wenn in Eagle viele Bauteile bereits vorhanden sind und viele Hersteller von Haus aus fertige EagleBibliotheken für ihre Bauteile zum Download bereitstellen, kommt es durchaus vor, dass man eine eigene Bibliothek anlegen muss. Das erfolgt in drei Schritten: 1. Als erstes erstellt man ein Symbol als Schaltzeichen für den Schaltplan (siehe Abbildung 10). 9 Abbildung 10: Erstellung eines Schaltzeichens 2. Danach zeichnet man das Gehäuse als Package für das spätere Layout auf dem Board. Hierbei ist es wichtig die Zeichnung des Bauteils maÿstabsgerecht anzufertigen (siehe Abbildung 11). Abbildung 11: Design eines Packages 3. Anschlieÿend verbindet man das Symbol und das Package zu einem Device indem man die Anschlusspins des Symbols den Lötpins des Packages zuordnet (siehe Abbildung 12). 10 Abbildung 12: Verknüpfung Schaltzeichen und Package 4 Konstruktion des Umrichters Der Umrichter besteht aus einem Gleichrichter, einem Gleichspannungszwischenkreis und einem Wechselrichter. Für die Wechselrichtung wird das FNB41060 von Fairchild verwendet, ein IGBT-Wechselrichtermodul ausgeführt als Drehstrombrückenschaltung. Dieses Modul ist mit einer Versorgungsgleichspannung beziehungsweise Zwischenkreisspannung von bis zu 450 V für die Nennspannung des Motors ausgelegt (230 V in Δ), kann mit einer Sperrschichtbetriebstemperatur bis 100 °C problemlos den Anlaufstrom des Motors (4,88 A) zum asynchronen Hochlauf am Netz bereitstellen und kann mit Taktfrequenzen bis 20 kHz arbeiten (siehe Literaturverzeichnis [6, 7]). Zusätzlich ist intern eine Schnittstelle zur Temperaturmessung, eine shortcut-shutdown-function und eine level-shift-function eingebaut. Letztere werden im Folgenden erklärt. 4.1 Potentialgleichheit dank level-shift-function Normalerweise besteht bei einem Wechselrichter das Highside-Problem. Dabei ist das Bezugspotential der Steuerspannungen der Ventile von Highside und Lowside unterschiedlich. Beispielsweise bei einer Drehstrombrückenschaltung mit IGBTs schalten diese bei einer Gate-Emitter-Spannung von 15 V, die Zwischenkreisspannung betrage 400 V. Die Ansteuerung der Lowside-IGBTs wäre einfach zu realisieren, indem man einfach eine Spannung von 15 V gegenüber Masse an das Gate anlegt. Bei den HighsideIGBTs muss allerdings eine Spannung von 400 V + 15 V angelegt werden. Dies ist meistens umständlich und erfordert eine zusätzliche Schaltung, eine galvanisch getrennte Treiberstufe. Das Wechselrichtermodul FNB41060 beinhaltet allerdings eine interne level-shift-function, welche dieses HighsideProblem behebt. 11 4.2 Sicherheit durch shortcut-shutdown-function Sollte es in einer Halbbrücke zu einem Kurzschluss kommen, wird der erhöhte Strom über einen Tiefpass detektiert und dank der shortcut-shutdown-function durch den Impuls an werden automatisch die Lowside-Ventile geönet. Gleichzeitig kann über P in 10 Csc (siehe Abbildung 13) P in 11 VF O ein Spannungs-Signal für den detektierten Fehlerstrom an die Microcontroller Unit (MCU) gegeben werden. 4.3 General Application Circuit Example Im Datenblatt AN-9070 des Moduls ist eine typische Beschaltung abgebildet, auf welche nun näher eingegangen wird (siehe Abbildung 13). Abbildung 13: General Application Circuit Example Dabei ist für das Ablesen der Werte der Kondensatoren zu beachten: Die Kondensatoren sind meist mit einem dreistelligen Wert versehen, zum Beispiel 102. Um daraus auf den Wert der Kapazität zu schlieÿen, geben die ersten beiden Ziern eine Mantisse an und die dritte den Exponenten von 10. Die Einheit ist typischerweise pF. Also gilt für einen Kondensator mit dem Wert 102: 102 = ˆ 10 · 102 pF = 1000 pF = 1 nF Widerstände werden häug mit 100R bezeichnet, was lediglich 100 Ω heiÿt, oder mit 4K7, was so viel bedeutet wie 4,7 kΩ. Was in Abbildung 13 unverständlich ist, ist die Verwendung zwei verschiedener Massesymbole für das gleiche elektrisch miteinander verbundene Potential. Durch diese elektrische Verbindung ist die Versorgung der Steuerseite des Moduls und der Versorgung der Leistungsseite nicht galvanisch getrennt, was jedoch wichtig sein 12 kann (siehe dazu Abschnitt 4.4.1). 4.3.1 Elektrolytkondensator || Kondensator || Z-Diode Eine Parallelschaltung von Elektrolytkondensator, Folienkondensator und Z-Diode (zum Beispiel zwischen P in 25 VS (u) und P in 26 VB (u) ) ist eine Blockung und Begrenzung der Spannung. Der Elektrolytkondensator und Folienkondensator haben die gleichen Aufgaben wie bereits im Abschnitt 3.1 erwähnt. Die in Sperrrichtung betriebene Zenerdiode dient zur Spannungsbegrenzung für den Fall einer längerzeitigen Spannungsüberhöhung. Dabei bedient sie sich ihres Zener-Eektes, welcher bewirkt, dass sie ab einer bestimmten Durchbruchspannung in Sperrrichtung leitend wird, bis wieder über der Diode maximal die Durchbruchspannung anliegt. Diese Parallelschaltung wird über eine sogenannte Bootstrap-Schaltung mit P in 17 VCC verbunden, in diesem Fall über eine Diode. Beim Einschalten des Moduls wird die Kapazität der Parallelschaltung über die Diode schnell aufgeladen beziehungsweise bei Spannungsabsenkungen nachgeladen. 4.3.2 RC-Tiefpasslter f Vor den Eingängen der Steuersignale sind Tiefpass-Filter angebracht. Die Grenzfrequenz g errechnet sich aus Widerstand und Kapazität zu: fg = 1 1 1 = = = 1, 6 MHz 2·π·τ 2·π·R·C 2 · π · 100 Ω · 1 nF Somit dämpfen die Tiefpässe Signale mit Frequenzen im MHz-Bereich. Darunter fallen Störungen, die durch das schnelle Schalten der IGBTs entstehen. Für die Zeitkonstante τ des Tiefpasses gilt: τ = R · C = 100 Ω · 1 nF = 100 ns Dadurch sind die Pegelwechsel der Ansteuersignale um ca. 100 ns verzögert, sodass diese vom nachfolgenden Logikbaustein verspätet erfasst werden. Bei der in Abschnitt 3.3.2 erwähnten Totzeit von mindestens 500 ns ist dies noch erträglich. 4.4 Erweiterung der Schaltung Da es sich bei der in Abbildung 13 gezeigten Schaltung um eine Beispielschaltung handelt, kann diese noch verändert werden. Es wird eine galvanische Trennung und eine Hardwareverriegelung eingefügt. 4.4.1 Galvanische Trennung durch Optokoppler Auch wenn aufgrund der zuvor erwähnten level-shift-function die Highside- und Lowside-Signale nicht im Potential getrennt werden müssen, ist es dennoch wichtig diese insgesamt vom Leistungsteil und dem Netz zu trennen. Im Falle eines Fehlers auf der Leistungsseite können dadurch die Steuerungssignale nicht durch Fehlerströme beeinusst werden. Ebenso sind die Steuerungssignale geschützt, falls es zu einer Störung auf 13 der Netzseite der Steuerung kommt. Wie in Abschnitt 4.3 erwähnt, ist es wichtig die Steuerung von der Leistungsseite galvanisch zu Trennen. Aus Sicherheitsgründen soll die Masse der Steuerung geerdet sein. Allerdings ist -Ud des Gleichspannungszwischenkreises (welche laut Abbildung 13 mit der Masse der Steuerung elektrisch verbunden ist) nicht gleich dem Schutzleiter PE (es sei denn es würde ein Transformator verwendet und -Ud geerdet werden). Die galvanische Trennung lässt sich durch Optokoppler realisieren, beispielsweise dem Dieser bringt eine Gatterlaufzeit (Propagation-delay-time) von tpd = tpdHL = tpdLH Avago ACPL-K34T. mit sich, welche die Reaktion des Ausgangs um eine gewisse Zeit verzögert. Dadurch, dass die Laufzeit das Einschalten genauso lange verzögert wie das Ausschalten, kann es nicht zu Überschneidungen von Highside- und Lowside-Signal kommen. Zusätzlich kann der Optokoppler auch mit verschiedenen Spannungsniveaus arbeiten, zum Beispiel 5 V Input von der MCU und 15 V Output für das Modul. Dabei ist darauf zu achten, dass die Versorgung der Optokoppler nicht aus der nichtisolierten Versorgungsspannung stammt. Abhilfe würde entweder ein galvanisch getrennter Gleichspannungswandler (Flyback-Converter) oder ein Netzteil mit ausreichend hoher Isolationsspannung schaen. Auÿerdem wird vor den Eingang ein Widerstand geschaltet, der den Strom begrenzt. Bei etwa 10 mA Eingangsstrom und 5 V Signalen ergibt sich für R: R= UBezug − UF,Diode 5 V−2 V = 300 Ω = Imax,Diode 10 mA Abbildung 14: Galvanische Trennung der Steuersignale 14 4.4.2 Hardwareverriegelung Um einen Brückenkurzschluss zu verhindern, wird als weitere Vorsichtsmaÿnahme hardwareseitig eine Verriegelung mit Totzeit eingebaut (da im gleichen Moment ein Schalter schlieÿt und ein zweiter sich önet). Die eingebaute shortcut-shutdown-function hat den Nachteil, dass sie erst reagiert, wenn bereits ein Kurzschluss vorliegt. Eine Verriegelung vor der Steuerseite des Moduls soll grundsätzlich diese Situation verhindern. Um ein gleiches Verhalten von Lowside und Highside zu ermöglichen, muss die Schaltung dementsprechend symmetrisch aufgebaut sein. Dies lässt sich mit einem RS-Flipop realisieren mit einem Ausgang für Highside und einem für Lowside. Hierbei wird bei einem Kurzschluss-Eingangssignal von S = R = 1 der aktuelle Zustand gespeichert. Aufgrund der in Abschnitt 3.3.2 erwähnten Totzeit gibt es Zustände, in denen beide Signale gleich Null sind. In Fachbüchern ndet man häug ähnliche Aussagen wie: Ein RS-Flipop hat die Eigenschaft, einen Ausgang zu setzen, zurückzusetzen und zu speichern. Der zweite Ausgang sei dabei stets komplementär. Wenn an beiden Eingängen des Flipops Signale so angelegt werden würden, dass Ausgangsseitig sich zwei gleiche Zustände einstellen, würde das Flipop einen nicht-erlaubten Zustand annehmen. (Siehe Literaturverzeichnis [2]) Diese Aussage bezüglich des nicht-erlaubten Zustands sind in der Digitaltechnik richtig. Elektrisch gesehen kann ein Flipop jedoch diesen nicht-erlaubten Zustand annehmen und auch wieder verlassen. Würde bei dem in Abbildung 15a gezeigten Flipop eingangsseitig S=R=0 anliegen, stellt sich ausgangsseitig Q = Q̄ = 1 ein. Wird nun eingangsseitig einer der Eingänge verändert, reagiert die Schaltung dementsprechend und es stellt sich der jeweilige Ausgang ein. Das einzige Problem, dass auftreten kann, ist dass vom Eingangszustand S = R = 0 auf S = R = 1 gewechselt wird. In diesem Fall kann man nicht vorherbestimmen, welcher Ausgang sich einstellt; entweder wird der vorherige gespeichert oder aber es stellt sich je nachdem welches der beiden Gatter schneller gearbeitet hat einer der Ausgänge auf 1 und der andere auf 0. Letzteres wird häug auch als race-condition bezeichnet. Abbildung 15b zeigt die entsprechende Wahrheitstabelle des RS-Flipops. Abbildung 15: RS-Flipop mit Wahrheitstabelle (Siehe Literaturverzeichnis [3]) 15 Als Einschaltverzögerung für die in Abschnitt 3.3.2 erwähnte Totzeit wird in beiden Rückführungen des Flipops ein RDC-Glied eingesetzt, also eine Parallelschaltung von einer Diode über dem Widerstand eines Tiefpasses. Dadurch kann der Kondensator des Tiefpasses nach einer Einschaltzeit/Totzeit geladen werden (logisch 1 ausgeben) und über die Diode zügig entladen werden (logisch 0 ausgeben). Für die Werte von R und C des Tiefpasses muss gelten, dass die Zeitkonstante einen Wert von 500 ns bis 3 µs besitzt (wie in Abschnitt 3.3.2 erwähnt). τ = R · C = 500 ns...3 µs Gewählt wurden R = 3 kΩ, C = 1 nF und der NAND-Schmitt-Trigger 74HC132. Dieser arbeitet mit etwa 5 V, daher liegt es nahe die Schaltung vor der galvanischen Trennung durch die Optokoppler anzubringen. Es wird ein NAND-Gatter mit Schmitt-Trigger-Eingängen verwendet, um das Problem unterschiedlicher Ein- und Ausschaltschwellen zu beheben. Im Anschluss werden beide Ausgänge noch invertiert, sodass mit positiver Logik angesteuert werden kann. Insgesamt werden für eine Phase dadurch vier Gatter benötigt. Zuletzt sei zu beachten, dass die einzelnen Gatter so versorgt werden wie die Optokoppler, also durch eine geerdete Versorgungsspannung. Abbildung 16: Hardwareverriegelung 4.4.3 Endgültige Schaltung Insgesamt ergibt sich nach Bearbeitung der zuvor behandelten Aspekte folgende in Abbildung 17 gezeigte Schaltung: 16 Abbildung 17: Vollständige Schaltung (zur besseren Übersicht aufgetrennt) 4.4.4 Stückliste Für die Schaltung werden die in Abbildung 18 aufgelisteten Bauteile benötigt: 17 Bauteil Bezeichnung Anzahl Wechselrichtermodul FNB41060 1 Optokoppler ACPL-K34T 7 Schmitt-Trigger-NAND 74HC132 12 Kondensator 100 nF / 35 V 3 1 nF / 50 V 8 33 nF / 35 V 1 100 nF / 630 V 1 Elektrolytkondensator Widerstand 1 nF 6 680 µF / 630 V 1 33 µF / 35 V 4 220 µF / 35 V 1 100 Ω / 125 mW 62 Ω / 125 mW 6,8 kΩ / 125 mW 4,7 kΩ / 125 mW 300 mΩ / 250 mW 20 mΩ / 5 W 3 kΩ 8 Diode 1N4004 6 Z-Diode 1N4749 4 1 1 1 6 6 6 Abbildung 18: Stückliste 5 Fortführung des Projekts Um den Umrichter zu bauen, sind noch folgende Schritte notwendig. 5.1 Platinenlayout Ein Layout der Schaltung muss noch erstellt werden und anschlieÿend das Board hergestellt werden. Die Leistungsseite wurde noch nicht galvanisch von der Versorgung der Steuerseite des Moduls getrennt. Zusätzlich muss mit dem Laboringenieur für Elektrische Maschinen und Antriebe geklärt werden, welche Netzteile zur Versorgung des Leistungsteils zur Verfügung stehen, sodass für diese ein zugehöriger Stecker auf der Platine eingeplant werden kann. Weitere Hinweise zum Layout können in den Leiterplatten-Layout-Richtlinien der Elektronikwerkstatt Technische Fakultät Universität Erlangen oder den entsprechenden DIN Normen nachgelesen werden (siehe Literaturverzeichnis [4]). 5.2 Elektromagnetische Verträglichkeit Ein weiterer noch zu behandelnder Aspekt ist die Elektromagnetische Verträglichkeit. Elektromagetische Störungen können entweder leitungsgebunden oder feldgebunden auftreten. Durch die galvanische Trennung der Steuerungssignale des Wechselrichtermoduls sind diese gegen leitungsgebundene Störungen geschützt. Feldgebundene Störungen müssen noch unter anderem durch das Platinenlayout (Antenne-Sender-EmpfängerPrinzip) und entsprechende Abschirmung der Leitungen unterbunden werden. 18 5.3 Regelung Für den Aufbau der Regelung müssen noch Stromwandler zur Strommessung ausgewählt werden. Früher waren Nachteile der digitalen Regelung die höheren Kosten und der Quantisierungsfehler bei A/DWandlern und D/A-Wandlern. Heutzutage bestehen diese Probleme nicht mehr. Beispielsweise ein 12-bit Wandler besitzt 212 = 4096 Stufen. Bei 5 V entspräche eine Stufe 5 4096 V = 1, 22 mV, was einen sehr kleinen Quantisierungsfehler ausmacht. Für die Regelung benötigt man ein Motorenmodell, mit dem diese arbeiten kann, zum Beispiel um den Verdrehwinkel zu erhalten. Mit diesem Modell kann eine Regelung aufgebaut werden. 6 Fazit Das Projekt war sehr umfangreich und konnte insgesamt noch nicht praktisch fertig gestellt werden. Dennoch war es sehr lehrreich und hat die Anwendung von elektronischen/ leistungselektronischen Grundlagen gut verdeutlicht. Es wurde die Generierung eines pulsweitenmodulierten Signals untersucht, sowohl für den einphasigen als auch dreiphasigen Fall. Dabei wurde deutlich, dass eine Totzeit zwischen den Steuersignalen von Oberschalter und Unterschalter wichtig ist. Anschlieÿend wurde für den Umrichter ein Wechselrichtermodul ausgewählt und dessen empfohlene Beschaltung analysiert. Diese wurde um gewisse Komponenten erweitert, beispielsweise die galvanischen Trennung durch Optokoppler oder die Hardwareverriegelung gegen das Kurzschlieÿen einer Halbbrücke. Dies Alles führte zu einem vollständigen Schaltplan für Gleichspannungszwischenkreis und Wechselrichter. Abbildungsverzeichnis 1 Prüfstand mit Bremse, Messwelle und Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 2 Prinzipschaltung eines Antriebs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 3 Auszug aus dem Datenblatt von EMK Motoren . . . . . . . . . . . . . . . . . . . . . . . . . 5 4 Ventilkennzeichnung in einer H-Brücke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 5 Modulation eines einphasigen PWM-Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 6 PWM mit Totzeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 7 PWM mit Totzeit (vergröÿert) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 8 3-phasige PWM mit Totzeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 9 PT1-Verhalten der Motorwicklungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 10 Erstellung eines Schaltzeichens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 11 Design eines Packages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 12 Verknüpfung Schaltzeichen und Package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 13 General Application Circuit Example 12 14 Galvanische Trennung der Steuersignale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 14 15 RS-Flipop mit Wahrheitstabelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 16 Hardwareverriegelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 17 Vollständige Schaltung (zur besseren Übersicht aufgetrennt) 18 Stückliste . . . . . . . . . . . . . . . . . . 17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 Literaturverzeichnis [1] Steuerverfahren für selbstgeführte Stromrichter; Felix Jenni, Dieter Wüest; vdf Hochschulverlag AG an der ETH Zürich; Stuttgart; Teubner; 1995 [2] Digitaltechnik: Lehr- und Übungsbuch für Elektrotechniker und Informatiker; Klaus Fricke; Springer Verlag; 7. Auage; 2014; [3] Basic Flip Flops; Circuits Today; www.circuitstoday.com/ip-ops; Stand 2014 [4] Leiterplatten-Layout-Richtlinien; Elektronikwerkstatt der Technischen Fakultät, MEW Universität Erlangen; http://www.mew.uni-erlangen.de/leiterplattenfertigung/lp-ri.pdf; Stand 08/2014 [5] EMK Niederspannungsmotoren; EMK-Motoren; http://www.dentgmbh.de/Downloads.html?le=tl_les/Downloads/Ka Katalog-2012.pdf; 2012 [6] AN-9070 Motion SPM(R)45 Users Guide; Fairchild Semiconductor; www.fairchildsemi.com; Rev. 2.0.2; 29/08/2009 [7] FNB41060 Motion SPM(R)45 Datasheet; Fairchild Semiconductor; www.fairchildsemi.com; Rev. C3; 01/2014 [8] 74HC132 Datasheet; NXP Semiconductors; www.nxp.com; Rev.2; 2013 [9] ACPL-K34T Datasheet; Avago Technologies; www.avagotech.com; 13/03/2013 20