Betrieb der Leistungshalbleiter
Werbung

2.
Betrieb der Leistungshalbleiter
Leistungshalbleiter können in Stromrichterschaltungen nur einwandfrei arbeiten, wenn nachfolgende Voraussetzungen erfüllt werden:
Sie sind vor unzulässigen Spannungs- und Strombeanspruchungen zu schützen.
Steuerbare Leistungshalbleiter benötigen geeignete Steuergeneratoren zur Erzeugung der
notwenigen Steuerströme oder Steuerspannungen.
Die in den Leistungshalbleitern auftretende Verlustwärme muss abgeführt werden.
2.1 Beschaltung
Unter Beschaltung versteht man das Anbringen von Kondensatoren und Widerständen, manchmal
in Kombination mit vorgeschalteten Induktivitäten, zur Bedämpfung von Überspannungen und
zur Vermeidung des Spannungs- und Stromanstiegs in den Leistungshalbleitern.
LR
RB
RB
CB
a)
RB
RP
CB
b)
CB
a) TSE-Beschaltung (RB, CB)
b) TSE-Beschaltung mit Parallelwiderstand RP
für Thyristor-Reihenschaltung
c)
TSE-Beschaltung mit zusätzlicher SerienRP
induktivität LR für Thyristor-Parallelschaltung
Thyristorbeschaltung
c)
Die Beschaltung bei Thyristoren erfüllt die Aufgaben:
Die Bedämpfung von Überspannungen,
die durch den Trägerstaueffekt (TSE) mit
plötzlichem Abreißen des negativen i
T
Rückstromes hervorgerufen werden. Man
spricht dann von der TSE-Beschaltung.
Die Begrenzung der Spannungssteilheit.
Die gleichmäßige Spannungsaufteilung
bei Reihenschaltungen und die gleichmäßige Stromaufteilung bei Parallelschaltungen, und zwar sowohl für den
statischen als auch für den dynamischen
Fall, d.h. bei Ein- und Ausschaltvorgängen.
uT
Verringerung der Spannungsbeanspruchung beim Ausschaltvorgang
durch TSE-Beschaltung
iT
uT
t
t
ohne TSEmit Beschaltung
Transformator- und Lastbeschaltung
Neben der direkten Beschaltung der Leistungshalbleiter können Beschaltungsglieder auch an
anderen Komponenten eines Stromrichters angebracht werden.
Die Transformatorbeschaltung unterdrückt Überspannungen durch Schalthandlungen oder dämpft
einlaufende Überspannungen aus dem speisenden Netz. Das RC-Glied kann direkt oder über eine
Gleichrichterbrücke angeschlossen werden.
G. Schenke, 9.2014
Leistungselektronik
FB Technik, Abt. E+I
16
Bei direktem Netzanschluss ohne Transformator wird meist eine Schutzdrossel eingefügt, hinter
der eine RC-Beschaltung liegen kann. Zusätzlich zur direkten Beschaltung der Leistungshalbleiter
kann eine RC-Beschaltung auf der Lastseite vorgenommen werden.
In kritischen Schaltungen werden auch Varistoren zur Spannungsbegrenzung eingesetzt.
Transformator-, Netzund Lastbeschaltung
Reihen- und Parallelschaltung
Bei hohen Strömen kann Parallelschaltung, bei hohen Spannungen Reihenschaltung mehrerer
Ventile in jedem Schaltungszweig erforderlich werden. Zur gleichmäßigen Aufteilung der
Beanspruchungen sind geeignete Beschaltungen notwendig.
Beschaltung bei GTO-Thyristoren
GTO-Thyristoren müssen vor unzulässigen Spannungsbeanspruchungen beim Abschalten mit
großer Stromsteilheit geschützt werden.
Der Beschaltungskondensator CB wird durch den Abschaltstrom
iA
iA und die zulässige Steilheit der Anodenspannung bestimmt.
Beim Einschalten des GTO-Thyristors entlädt sich der
LK
Kondensator CB über den Widerstand RB. Es entsteht die VerL
lustenergie 0,5 · CB · U2. Bei höheren Schaltfrequenzen wird
diese Verlustenergie hoch, so dass hier auch verlustarme
Beschaltungen verwendet werden.
RB
uA
GTO
CB
D
iA
CB
du A
dt
(2.1)
RCD-Beschaltung eines GTO
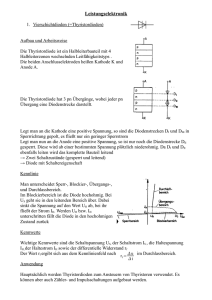
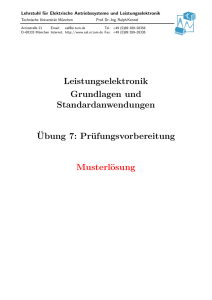
2.2 Zündung
Steuerbare Leistungshalbleiter benötigen grundsätzlich geeignete Steuergeneratoren.
Thyristoren
Thyristoren benötigen einen Steuerstrom, durch den das Ventil bei positiver Sperrspannung
zwischen Anode und Kathode in den leitenden Zustand geschaltet wird - von der positiven
Sperrkennlinie auf die Durchlasskennlinie.
In der Ansteuerschaltung wird das Einschaltsignal des Thyristors zunächst mit der Spannung am
Thyristor synchronisiert. Im Allgemeinen ist dieses die Synchronisation mit der entsprechenden
Phase des Energienetzes. Über eine Steuereinrichtung - im einfachsten Fall ein Potentiometeroder eine Regeleinrichtung wird aus dem Synchronsignal die Phase bestimmt und hieraus ein geeigneter Impuls erzeugt, der periodisch am Ausgang zur Verfügung steht. Die Ansteuerschaltung
kann mit mehreren Transistoren oder einem Mikroprozessor realisiert werden.
Das Ausgangssignal der Ansteuerschaltung wird auf den Eingang des nachgeschalteten Steuerimpulsgenerators gegeben. Für das nachfolgende Schaltungsbeispiel eines Steuerimpulsgenerators
G. Schenke, 9.2014
Leistungselektronik
FB Technik, Abt. E+I
17
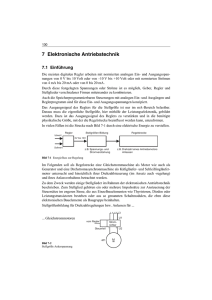
muss dessen Eingangssignal uE aus einem oder mehreren Kurzimpulsen bestehen. Der
Steuerimpulsgenerator wird mit einer Spannung Ub = 15 V ... 60 V betrieben. In ihm erfolgt die
Impulsverstärkung und anschließend die Potentialtrennung im Impulsübertrager TR. Über den
Impulsübertrager als Potentialtrennstelle werden sowohl das Signal als
iG
auch die Steuerleistung uG · iG überUb
tragen. Das Signal muss dabei so kurz
oder der Übertragerkern so groß beuG
messen sein, dass der Impuls übertragen wird ohne dass der Kern in die
Sättigung kommt. Die auf der PrimärTR
seite des Übertragers angeordnete
Diode und Zenerdiode dienen der
Entmagnetisierung des Kerns. Der darSchaltungsbeispiel eines
uE
gestellte Steuerimpulsgenerator ist nur
Steuerimpulsgenerators
für Kurzimpulse mit einem Mindestimpulsabstand geeignet (Impulskamm
bei induktiver Last erforderlich).
Der Zündbereich wird bei Thyristoren von einer oberen und einer unteren Grenzkurve
eingeschlossen. Zündstrom und Zündspannung hängen von der Sperrschichttemperatur j ab. Bei
niedrigen Sperrschichttemperaturen besteht ein großer Zündstrombedarf, bei hohen Sperrschichttemperaturen ein wesentlich niedrigerer. Der Steuerimpulsgenerator ist so zu dimensionieren, dass
im gesamten Temperaturbereich die sichere Zündung entsprechend dem Datenblatt des Thyristors
erfolgt. Der obere Grenzwert der Steuerverlustleistung pG - Produkt von Steuerstrom iG und
Steuerspannung uG - darf nicht überschritten werden.
u
max.
Impulshöhe
0
t
100%
iG
Impulsmindesthöhe
2%
t
2%
Anstiegszeit
Impulsdauer tI
T = 20 ms
iG
Abstiegszeit
t
tI = 10 ... 50 µs
Steuerimpuls für Thyristoren
Impulskammerzeugung
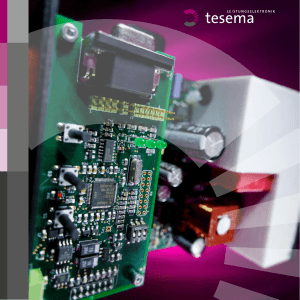
Triacs
Zur Zündung von Triacs kann grundsätzlich eine einfache Schaltung (Phasenanschnittsteuerung)
mit Diacs benutzt werden.
Diacs sind ähnlich wie Transistoren aufgebaut (Zonenfolge P-N-P). Bei einer bestimmten
Spannung UB0 bricht der in Sperrrichtung betriebene PN-Übergang wie bei der Zenerdiode durch.
Unterhalb der Spannung UB0 ist der Diac hochohmig.
Als Lastwiderstand RL sind kleine Kollektormotoren oder Glühlampen denkbar. Die Phasenverschiebung des Gate-Steuerimpulses erfolgt mit dem Potentiometer R2 über den Spannungsverlauf an C3. Wird die Durchbruchspannung des Diac erreicht, dann zündet der Diac über das Gate
den Triac in jeder Netzhalbschwingung.
G. Schenke, 9.2014
Leistungselektronik
FB Technik, Abt. E+I
18
L
RL
R1
230 V~
50 Hz
R4
C1
R2
R1 = 3,3 k
R3 = 15 k
C1 = 0,1 F
C3 = 0,1 F
L = 200 H
R2 = 250 k
R4 = 47
C2 = 0,1 F
C4 = 22 nF
R3
C4
C2
C3
Phasenanschnittsteuerung
mit Diac und Triac
GTO-Steuerimpulsgenerator
Wie bei konventionellen Thyristoren müssen für GTO-Thyristoren Steuerimpulse definierter
Anstiegszeit und Amplitude erzeugt werden. Eine Potentialtrennung zwischen Steuerungs- und
Leistungsteil ist erforderlich.
Der Einschaltvorgang bei GTO-Thyristoren entspricht dem Einschaltvorgang von konventionellen Thyristoren.
Für das Abschalten wird ein negativer Strom mit großer Steilheit und Amplitude erforderlich. Der
negative Gatestrom, den der Steuerimpulsgenerator bereitstellen muss, sollte etwa 40 % des
Laststromes im Scheitelwert erreichen. Manchmal kann ein zusätzlicher Dauerstrom erforderlich
sein.
Der Aufwand für GTO-Steuerimpulsgeneratoren ist sehr hoch.
Bipolare Transistoren
Der Steuergenerator muss den Basisstrom iB, der entsprechend der Stromverstärkung des
Transistors groß sein kann, zur Verfügung stellen. Bei hohen Kollektor-Emitter-Spannungen ist
Potentialtrennung zwischen Steuerungs- und Leistungsteil erforderlich.
Zur Verringerung der Ausschaltverlustleistung und bei höheren Betriebsfrequenzen muss
kurzzeitig beim Ausschalten ein negativer Basisstrom fließen.
MOS-FET und IGBT
Um diese Leistungshalbleiter anzusteuern, wird eine Steuerspannung, die Gate-Source-Spannung
UGS beim MOS-FET und die Gate-Emitter-Spannung UGE beim IGBT, benötigt.
Der Eingangswiderstand liegt im Giga-Ohm-Bereich. Der Eingang erscheint nahezu rein
kapazitiv; im wesentlichen ist die Eingangskapazität Ciss umzuladen.
Die maximale Steuerspannung hängt von der Feldstärke Emax 109 V/m, die in der Oxidschicht
auftreten darf, und von der Dicke dieser Oxidschicht ab. Oxidschichtdicken von 50 - 200 nm
werden verwendet.
Die Hersteller geben die maximale Steuerspannung mit ±20 V an. Für den Betrieb sollten
Steuerspannungen zwischen 10 V und 15 V vorgesehen werden. Der Innenwiderstand der Quelle
sollte 50 betragen.
Beim Ein- und Ausschalten fließt kurzzeitig ein Steuerstrom, der exponentiell abklingt.
Wegen der geringen Steuerleistung ist nur ein geringer Aufwand für den Steuergenerator
erforderlich.
Die Ansteuerung eines MOS-FET bzw. IGBT ist in hohem Maße verantwortlich für das
Schaltverhalten.
G. Schenke, 9.2014
Leistungselektronik
FB Technik, Abt. E+I
19
Wichtige Kriterien für die Treiberschaltung sind die parasitären Kapazitäten des MOS-FET bzw.
IGBT, die Schaltfrequenz und ob es sich um einen High-side-Schalter oder Low-side-Schalter
handelt. Low-side-Treiber und High-side-Treiber können mit diskreten Elementen oder mit
speziellen integrierten Ansteuerschaltungen ohne galvanische Trennung realisiert werden. Mit
galvanischer Trennung sind optisch entkoppelte Ansteuerschaltungen oder Ansteuerschaltungen
mit Übertrager für hohe Anforderungen an Isolation und Prüfspannung möglich.
Low-side-Treiber werden für Low-side-Schalter verwendet bei denen Source (MOS-FET) bzw.
Emitter (IGBT) auf Bezugsmasse liegen.
High-side-Treiber werden für High-side-Schalter verwendet bei denen Source (MOS-FET) bzw.
Emitter (IGBT) auf gleitendem Potential liegen. Dieser Treiber ist komplexer im Aufbau. Highside-Treiber erfordern ggf. eine zusätzliche Hilfsspannung. Weit verbreitet ist die sogenannte
Bootstrapschaltung. Sie kommt ohne Hilfsspannung aus, hat aber den Nachteil, dass keine
statische Ansteuerung des Schalters möglich ist. Anwendung findet diese Schaltung vor allem bei
induktiven Lasten mit maximalen Einschaltzeiten. Sie eignet sich gut für Halb- und Vollbrücken.
+Ud
DB
HB
CB
UVD
Treiber
Pegelumsetzer
HO
HS
HIN
+15 V
UVD
Treiber
LIN
0V
LO
HIN = Eingang für
den High-side-Treiber
LIN = Eingang für
den Low-side-Treiber
HB = Anschluss für
den Bootstrapkondensator
HO = High-sideGateanschluss
HS = High-sideSourceanschluss
LO = Low-sideGateanschluss
Blockschaltbild eines integrierten Schaltkreises mit Low-side-Treiber
und High-side-Treiber für FET- und IGBT-Halbbrücken
Das Blockschaltbild des kombinierten Low-side- und High-side-Treibers zeigt die prinzipielle
Arbeitsweise von Treiberschaltungen für FET und IGBT. Das Eingangssignal LIN wird über
einen Schmitt-Trigger-Eingang und ein UND-Gatter direkt auf den eigentlichen Treiber
geschaltet. Das UND-Gatter schaltet das Eingangssignal nur durch, wenn der Unterspannungsdetektor (UVD) eine ausreichende Versorgungsspannung (+15 V) signalisiert. Das Eingangssignal HIN wird über einen Schmitt-Trigger-Eingang, ein UND-Gatter, einen Pegelumsetzer
(Optokoppler) und ein weiteres UND-Gatter auf den eigentlichen Treiber geschaltet. Dieser
Treiber kann den Ausgang HO nur dann auf High-Pegel schalten, wenn die Versorgungsspannung (+15 V) und die interne Versorgungsspannung des Treibers ausreichend vorhanden
sind. Diese Spannung wird vom externen Bootstrapkondensator CB (unmittelbar am IC)
bereitgestellt. Der Bootstrapkondensator wird über die Bootstrapdiode DB nachgeladen, wenn der
Low-side-FET (IGBT) durchschaltet. Bei integrierten Schaltkreisen mit Ud > 150 V wird eine
externe schnelle Diode verwendet. Für IGBT im mittleren und höheren Leistungsbereich kommen
komplexe Treiber zur Anwendung.
G. Schenke, 9.2014
Leistungselektronik
FB Technik, Abt. E+I
20
MCT
Beim P-Kanal-MCT wird eine negative Gate-Anoden-Spannung UGA zum Zünden und eine
positive Spannung UGA zum Ausschalten benötigt. Für High- und Low-side-Treiberschaltungen
sind die dynamischen Vorgaben beim Ein- und Ausschalten wichtig.
IGCT
Beim IGCT ist die komplexe Ansteuerschaltung des GCT am Modul integriert und für das
Schalten des GCT optimiert. Der IGCT selbst kann mit einem einfachen Signal - z.B. LED-Signal
- angesteuert werden.
2.3 Kühlung
In Leistungshalbleitern treten im Betrieb Verluste auf, die eine Erwärmung hervorrufen.
Abgesehen von den Kupferverlusten in den Zu- und Ableitungen entstehen die Verluste im
eigentlichen Halbleitersystem. Diese Verluste setzen sich aus Durchlass-, Sperr-, Schalt- und
Steuerverlusten zusammen. Die entsprechende Verlustwärme muss über das Gehäuse und den
Kühlkörper an die Umgebung abgeführt werden.
Bei 50-Hz-Anwendungen sind die Durchlassverluste besonders zu berücksichtigen. Ähnlich wie
bei allen Leistungshalbleitern gilt für Thyristoren:
1
T
PT
T
u T iT dt
0
1
T
T
(U T0
rT iT ) i T dt
UT0 ITAV
(2.2)
0
80
iT in A
2
rT ITRMS
60
40
rT =
uT
iT
Die Sperrverluste sind im Allgemeinen gering und können vernachlässigt werden. Die Schaltverluste können bei mittleren
und hohen Schaltfrequenzen
sehr groß sein. Sie sind das
Produkt aus Verlustarbeit beim
Schaltvorgang und der Schaltfrequenz.
20
0
0
0,4
0,8
U(T0)
1,2
1,6
uT in V
Schleusenspannung U(T0) und
Ersatzwiderstand rT
2
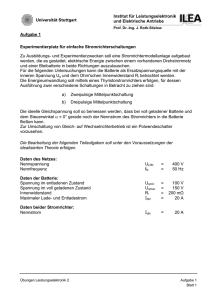
Die Sperrschichttemperatur darf bei Siliziumhalbleitern 150°C nicht überschreiten. Oberhalb von
200°C setzt Eigenleitung im Silizium ein. Die infolge der Verluste im Leistungshalbleiter auftretende Erwärmung kann mit der thermischen Ersatzschaltung angenähert berechnet werden. Zur
vereinfachten Berechnung eines solchen Systems werden der Siliziumscheibe die Sperrschichttemperatur J, dem Gehäuse die Gehäusetemperatur C, dem Kühlkörper die Kühlkörpertemperatur K und der Umgebung die Umgebungstemperatur A zugeordnet.
Die Berechnung der Sperrschichttemperatur J erfolgt bei gegebener gesamter Verlustleistung PT
des Thyristors (Stromrichterventil) und bekannten thermischen Widerständen R th für die Wärmeleitung und den Wärmekapazitäten Cth = V · · c (V = Volumen, = Dichte, c = spezifische
Wärmekapazität) für die Wärmespeicherung analog zum elektrischen Stromkreis.
G. Schenke, 9.2014
Leistungselektronik
FB Technik, Abt. E+I
21
P
J
CthJ
Silizium-Kristall
RthJC
Gehäuse
C
CthC
RthCK
Kühlkörper
K
CthK
RthJC = Wärmewiderstand
Sperrschicht - Gehäuse
RthCK = Wärmewiderstand
Gehäuse - Kühlkörper
RthCK = Wärmewiderstand
Kühlkörper - Umgebung
CthJ = Wärmekapazität
des Silizium-Kristalls
CthC = Wärmekapazität
des Gehäuses
CthK = Wärmekapazität
des Kühlkörpers
RthKA
A
Thermische Kenngröße
Temperaturen und
Wärmewiderstände Rth
bei einem Thyristormodul mit Kühlkörper
Elektrische Kenngröße
Wärmemenge (Energie)
Q in Ws
Ladung
Q in As
Wärmestrom (Leistung)
P in W
Strom
I in A
in K
Spannung
U in V
Wärmewiderstand
Rth in K/W
Widerstand
R in
Wärmekapazität
Cth in Ws/K
Kapazität
C in As/V
Temperaturunterschied
100
70
50
RthKA
K / W 30
20
10
7
5
3
2
1
0
G. Schenke, 9.2014
Analogie thermischer und elektrischer Kenngrößen
Der Wärmewiderstand des Kühlkörpers ist
abhängig vom verwendeten Werkstoff, von
seiner Konstruktion und von der Kühlmittelgeschwindigkeit. Es ist auf einen guten
Wärmeübergang zwischen Leistungshalbleiter und Kühlkörper beim Zusammenbau
zu achten. Dieses wird erreicht durch glatte,
saubere mit Wärmeleitpaste eingeriebene
Stahl 1 mm
Kontaktflächen. Es ist ein gleichmäßiger
Anpressdruck erforderlich.
Neben der natürlichen Luftkühlung wird bei
erhöhten Anforderungen die erzwungene
0,5 Umlaufkühlung (Ventilator) eingesetzt.
1
Wärmewiderstand von
2
Aluminiumblechen,
5
Kantenlänge quadratischer, blanker
Blechdicke in mm
Bleche bei senkrechter Anordnung
(waagerechte Montage A = + 30 %,
4
8
12
16
20
geschwärztes Blech A = - 30 %)
Kantenlänge l / cm
Leistungselektronik
FB Technik, Abt. E+I
22
Müssen große Wärmemengen auf kleinem Raum abgeführt werden, so wird Öl oder Wasser als
Kühlmittel eingesetzt. In Sonderfällen wird bei Stromrichtern die Siedekühlung eingesetzt. Hier
wird das Prinzip der Verdampfungskühlung ausgenutzt.
Beispiel: Thyristor-Modul TT 25N (wird im Labor eingesetzt, wird nicht mehr gefertigt)
ITAVM = 25 A bei tC = 85°C
U(T0) = 1,05 V
rT = 11 m
RthJC = 0,84 K/W (pro Thyristor) RthCK = 0,20 K/W (pro Thyristor)
Jmax = 125°C
2.4 Schaltbedingungen in elektrischen Netzen
Stromrichterschaltungen bestehen aus der Kombination von Spannungsquellen, Transformatoren,
magnetischen und elektrischen Energiespeichern, Energieumsetzern (Wirkwiderstände) und
periodisch betätigten Halbleiternschaltern. Die Halbleiterschalter werden hierbei wie ideale
Schalter betrachtet.
Schalten einer Induktivität
Für das Einschalten einer Induktivität L im Zeitpunkt t0 über einen Wirkwiderstand R an eine
zeitlich konstante Spannung u(t) = Ud gilt:
i(t)
i
t0
R
uL
u(t) = Ud
L
uL
Ud
R
-
t - t0
1- e
di
L
dt
mit
-
L
R
(2.3)
t - t0
Ud e
(2.4)
Schalten einer Induktivität
di
dt
1,0
0,8
uL / Ud
i / Ud 0,6
R
0,4
i
uL
0,2
0
0
t
t0
max
Ud
L
(2.5)
Die maximale Stromänderungsgeschwindigkeit tritt im Schaltzeitpunkt
t0 auf.
Kennzeichnend für das Schalten von
Induktivitäten L ist also, dass die
Spannung uL in Schaltzeitpunkten
sich sprunghaft ändert und der Strom
i knickt, d.h. seine Stromänderungsgeschwindigkeit ändert, jedoch seinen Augenblickswert behält.
Schalten eines Kondensators
Für das Einschalten eines ungeladenen Kondensators C im Zeitpunkt t0 über einen Wirkwiderstand R an eine zeitlich konstante Spannung u(t) = Ud gilt:
-
uC
i
Ud
Ud e
R
1- e
t - t0
mit
(2.6)
R C
t - t0
G. Schenke, 9.2014
(2.7)
Leistungselektronik
FB Technik, Abt. E+I
23
Die maximale Spannungsänderungsgeschwindigkeit tritt im Schaltzeitpunkt t0 auf.
du C
Ud
dt max
R C
Kennzeichnend für das Schalten von Kondensatoren C ist also, dass der Strom i in Schaltzeitpunkten sich sprunghaft ändert und die
Spannung uC knickt, d.h. ihre Spannungsänderungsgeschwindigkeit ändert, jedoch ihren
Augenblickswert behält.
i(t)
t0
R
uC
u(t) = Ud
(2.8)
C
Schalten eines Kondensators
1,0
0,8
uC / U d
i / Ud 0,6
R
0,4
uC
i
0,2
0
0
t
Die Ergebnisse der an zwei einfachen
Netzwerken behandelten Schaltvorgänge lassen sich auch auf umfangreiche Schaltkreise anwenden. Dann
sind jedoch die Summen aller Spannungsquellen, Induktivitäten oder
Kapazitäten zu betrachten. Bei Quellen mit zeitlich veränderlicher Spannung u(t) ist der Augenblickswert der
Spannung im Schaltzeitpunkt t0 zu
berücksichtigen.
t0
Kommutierung
2.5
Allgemein versteht man in der Elektrotechnik unter Kommutierung die Übergabe eines Stromes
von einem Stromzweig auf einen anderen, wobei während der Kommutierungszeit beide Zweige
Strom führen. In der Leistungselektronik werden die am Beginn und am Ende eines jeden
Kommutierungsvorganges stehenden Schaltfunktionen durch Leistungshalbleiter verwirklicht.
Die Kommutierung verläuft nur bei Vorhandensein einer geeigneten Kommutierungsspannung uk
im Kommutierungskreis. Nutzt man als Kommutierungsspannung die im Wechsel- bzw.
Drehspannungsnetz vorhandenen natürlichen Spannungen aus, so spricht man von natürlicher
Kommutierung. Wird die Kommutierungsspannung von einer Last erzeugt, so spricht man auch
von Lastkommutierung.
Wird die Kommutierungsspannung von einem Energiespeicher (Löschkondensator) zur Verfügung gestellt, oder durch Widerstandserhöhung des zu löschenden Stromzweiges (abschaltbarer
Leistungshalbleiter) erzeugt, so spricht man von erzwungener Kommutierung oder Zwangskommutierung.
Während des Kommutierungsvorgangs erfolgt der Übergang des Stromes I vom Stromzweig 1
auf den Stromzweig 2. Im nachfolgenden Bild symbolisieren die Schalter S1 und S2
Stromrichterventile. Bis zum Zeitpunkt t1 fließt der Strom I über den geschlossenen Schalter S1.
Der Kommutierungsvorgang wird durch Schließen des Schalters S2 eingeleitet. Unter dem
Einfluss der Kommutierungsspannung uk fließt der Kommutierungsstrom ik, der den Strom I im
Stromzweig 1 (i1{t}) ab- und im Stromzweig 2 (i2{t}) aufbaut. Wenn der Strom i2{t} den Wert I
erreicht und damit der Strom i1 = 0 geworden ist, wird der Kommutierungsvorgang durch Öffnen
des Schalters S1 zum Zeitpunkt t2 abgeschlossen.
G. Schenke, 9.2014
Leistungselektronik
FB Technik, Abt. E+I
24
u1(t) Stromzweig 1
Lk1
Rk1 S1
I
i1
t1 + t
i1
L
uk(t)
u2(t)
Lk2
I
ik
Stromzweig 2
0
i2
S2
Rk2
i2
t1
t
t
t1
t1 + t
S2 ein
S1 aus
Kommutierungskreis und Stromverlauf
Für die Kommutierungsspannung und die Ströme gelten:
uk
u 2 - u1
I i1 i 2
(2.9)
Für den Kommutierungsvorgang kann die Differentialgleichung (Gl. 2.10) aufgestellt werden.
d
di 2
u1 - L k1 i1 - R k1 i1 u 2 - L k2
(2.10)
- R k2 i 2
dt
dt
Bei großer Induktivität L ist der Strom I während des Kommutierungsvorganges konstant. Mit
den Gln. (2.9 und 2.10) gilt bei konstantem Strom I für die Kommutierungsspannung:
di
uk
R k2 I - (R k1 R k2 ) i1 - (L k1 L k2 ) 1
(2.11)
dt
Werden die Schalter durch ideale Thyristoren ersetzt, die ohmschen Widerstände im Kommutierungskreis vernachlässigt und außerdem angenommen, dass die Kommutierungsinduktivitäten
Lk gleich groß sind, dann ergibt sich nachstehende Ersatzschaltung:
u1
Lk
T1
Id
u2
uk
Lk
T2
iT1
ik
Ld
Id
Ersatzschaltung zum Berechnen
der Kommutierung von T1 auf T2 bei
großer Induktivität Ld (Id = konst.)
iT2
Für die Kommutierungsspannung uk gilt:
di k
uk
u 2 - u1 2 L k
dt
Dabei ist ik der im Kommutierungskreis fließende Kurzschlussstrom. Für ihn gilt:
ik
i T2
Id - i T1
Bei sinusförmig verlaufender Kommutierungsspannung u k
(2.12) für den Verlauf des Kurzschlussstromes ik:
2 Uk
ik
sin t dt
2 Lk
Mit der Anfangsbedingung t0 = , ik = 0 gilt:
(2.12)
(2.13)
2 U k sin t erhält man aus Gl.
(2.14)
2 Uk
(2.15)
(cos - cos t)
2
Lk
Die Kommutierungszeit, während der zwei sich ablösende Ventile (hier Thyristoren) infolge der
im Kommutierungskreis wirksamen Impedanzen gleichzeitig an der Stromführung beteiligt sind,
nennt man Überlappungszeit tu und den entsprechenden Winkel Überlappungswinkel u.
ik
G. Schenke, 9.2014
Leistungselektronik
FB Technik, Abt. E+I
25
uk
u1
u2
u1 + u2
2
t
Zeitverläufe von
Spannungen und
Strömen im
Kommutierungskreis
für = 0°
u0
iT1
iT2
Id
t1
t
t1 + t
uk
u1
u2
u1 + u2
2
t
Zeitverläufe von
Spannungen und
Strömen im
Kommutierungskreis
für = 45°
u
iT1
iT2
Id
t1 t1 + t
t
Der Kommutierungsvorgang endet, wenn der Strom ik den Gleichstrom Id erreicht.
2 Uk
cos - cos (
u)
2
Lk
Für den Anfangsüberlappungswinkel u0 bei = 0 gilt:
I 2
Lk
cosu 0 1 - d
2 Uk
i k (t1
t)
(2.16)
Id
G. Schenke, 9.2014
Leistungselektronik
(2.17)
FB Technik, Abt. E+I
26