P1-53,54,55: Vierpole und Leitungen
Werbung

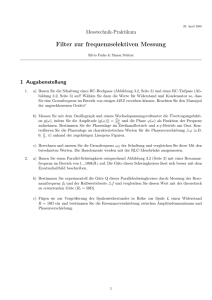
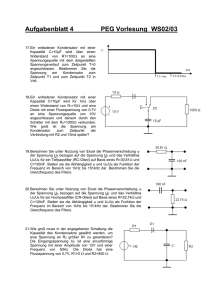
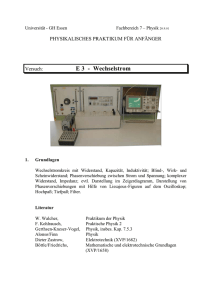
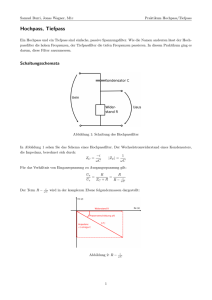
Physikalisches Anfängerpraktikum (P1) - Auswertung P1-53,54,55: Vierpole und Leitungen Benedikt Zimmermann, Matthias Ernst (Gruppe Mo-24) 1 Durchführung 1.1 Messungen des Übertragungsverhaltens des einfachen Vierpols 1.1.1 Messung am Hochpass An einen Hochpass (Reihenschaltung aus Widerstand und Kondensator bei Messung am Widerstand) wurde sinusförmige Wechselspannung der Amplitude Ue =8Vss (alle Spannungen verstehen sich als Spitze-zu-Spitze-Spannungen) und der Frequenz f=1,7kHz angelegt. Dabei wurde zur Messung der Tastkopf mit Spannungsteilerverhältnis 1 1 10 verwendet, es wird also nur 10 der tatsächlich anliegenden Spannung gemessen. Die Kapazität des Kondensators betrug C=1nF. Es wurden verschiedene Widerstände verwendet, diese sind in Tabelle 1 in der ersten Zeile festgehalten. Gemessen wurden oszilloskopisch die folgenden Ausgangsspannungen und Phasenverschiebungen zwischen dem Eingangs- und dem Ausgangssignal: R in kΩ Ua in mV ∆t in µs 1 10 100 1000 8 76 560 780 -150 -130 -75 - 10 Tabelle 1: Messung am einfachen Vierpol: Hochpass 1.1.2 Messung am Tiefpass Es wurden dieselben Messungen wie in 1.1.1 durchgeführt, jedoch wurde die Schaltung nun als Tiefpass, also am Kondensator, oszilloskopisch vermessen. R in kΩ Ua in mV ∆t in µs 1 10 100 1000 800 800 570 8 0 10 70 130 Tabelle 2: Mesung am einfachen Vierpol: Tiefpass 1 1.2 Messungen unter Verwendung des Vierpols als Dierenzier- bzw. Integrierglied 1.2.1 Hochpass als Dierenzierglied An einen Hochpass, bestehend aus einem 1nF-Kondensator und verschiedenen Widerständen (s. Tabelle 3) wurde dreieckförmige Wechselspannung der Amplitude Ue =8Vss und der Frequenz f=1,7kHz angelegt. Die Ausgangsspannung am jeweiligen Widerstand wurde oszilloskopisch gemessen. R in kΩ 1 Ua in mV Qualität von Ua 10 100 1000 5 50 460 800 schön (Rechteck) schön minder schön (Sägezahn) schlecht Tabelle 3: Messung am Vierpol als Dierenzierglied Die Signalformen wurden photographisch festgehalten und sind in Abb. 1 dargestellt. (a) R=1kΩ (b) R=10kΩ (c) R=100kΩ (d) R=1000kΩ Abbildung 1: Signalverlauf bei Einsatz des Hochpasses als Dierenzierglied 1.2.2 Tiefpass als Integrierglied Dieselben Bauteile wie in Abschnitt 1.2.1 wurden nun als Tiefpass eingesetzt. Dabei wurde nun die Ausgangsspannung bei Anlegen von Rechteckspannung derselben Amplitude und Frequenz wie dort vermessen. 2 R in kΩ 1 Ua in mV Qualität von Ua 10 100 1000 800 800 720 130 schlecht kaum besser minder schön (Sägezahn) schön (Dreieck) Tabelle 4: Messung am Vierpol als Integrierglied Auch hier wurden die Signalformen photographisch festgehalten, sie sind in Abb. 2 dargestellt. (a) R=1kΩ (b) R=10kΩ (c) R=100kΩ (d) R=1000kΩ Abbildung 2: Signalverlauf bei Einsatz des Tiefpasses als Integrierglied 1.2.3 Weitere Messungen mit dem Dierenzier- und Integrierglied Testweise wurde sinusförmige Wechselspannung an das Dierenzierglied angelegt. Wenig überraschend wurde diese in phasenverschobene, aber immer noch sinusförmige Wechselspannung transformiert. In weiteren Messungen wurde an das Dierenzierglied Rechteckspannung und an das Integrierglied Dreieckspannung derselben Frequenz und Amplitude wie oben angelegt. Dabei wurde qualitativ das Verhalten beobachstet, dass die Recheckspannung mit dem geeigneten Widerstand zu einzelnen Peaks, die Dreiecksspannung zu annähernd parabelförmigen Bereichen um die Extrema transformiert wurden. Auch diese Verläufe wurden photographiert, Abb. 3 zeigt sie. 3 (a) Dierentiation von Rechteckspannung, R=1kΩ (b) Integration von Dreieckspannung, R=1000kΩ Abbildung 3: Signalverlauf bei den weiteren Messungen 1.3 Messungen am π-Glied und einer sechgliedrigen Drosselkette 1.3.1 Messung des charakteristischen Widerstands der Drosselkette An die sechsgliedrige Drosselkette wurde Rechteckspannung der Frequenz f=10kHz und der Amplitude Ue =6Vss angelegt. Unter Beobachtung der Ausgangsspannung am Oszilloskop wurde ein regelbarer Abschlusswiderstand am Ende der Kette justiert, um das optisch schönste, also glatteste Rechtecksignal zu erhalten. Dieses wurde bei Z0 = 185Ω beobachtet. 1.3.2 Messung der Grenzfrequenz der Drosselkette An die Drosselkette wurde sinusförmige Wechselspannung der Amplitude Ue =6Vss angelegt, wobei der Abschlusswiderstand auf dem vorher bestimmten Wert von Z0 belassen wurde. Dieser Wert wurde auch später im Gegensatz zur Versuchsvorschrift beibehalten, da eine Kompensation der Reexion mit dem gegebenen Widerstand nicht möglich war. Zunächst wurde die Frequenz im Bereich zwischen 1kHz und 1MHz variiert und geprüft, inwiefern die vom Generator erzeugte Spannung frequenzabhängig ist. Die Abhängigkeit war sehr klein, bei 500kHz war kaum eine Änderung zu sehen, bei 1000kHz betrug sie ca. 0 4Vss . Dann wurde die Spannung ausgehend von kleinen Werten so lange gesteigert, bis der Bereich des stärksten Abfalls der Ausgangsspannung gefunden wurde (diese schwankte beim Erhöhen der Spannung immer wieder, brach dann jedoch erheblich ein). Das Verhältnis Ua Ue = 1 10 wurde bei 720kHz erreicht. 1.3.3 Angegeben Daten der Drosselkette µ Für die Drosselkette waren C/2=1nF und L=96 H angegeben. 1.3.4 Messung der Phasenverschiebung der Drosselkette An ein einzelnes π -Glied und an die gesamte Drosselkette wurde jeweils sinusförmige Wech- selspannung verschiedener Frequenzen (siehe Tabelle 5) mit der Amplitude Ue =6Vss angelegt. Auch hier wurde im Gegensatz zur Vorschrift der Abschlusswiderstand bei der oben ermittelten Einstellung belassen. Für beide Anordnungen wurde die Zeitdierenz zweier am Oszilloskop aufeinanderfolgenden Maxima abgelesen. 4 f in kHz ∆t ∆t in in 10 µs (π -Glied) µs (Drosselkette) 100 300 500 0 0,4 0,45 2,5 2,6 2,6 Tabelle 5: Messungen am π -Glied 600 650 690 0,46 0,46 0,44 0,44 0,8 1,35 0,1 0,52 und der Drosselkette Anschlieÿend wurde jeweils an der Drosselkette mittels Variation der Frequenz der Wechselspannung eine bestimmte Phasenverschiebung eingestellt und anschlieÿend am einzelnen π -Glied die Phasenverschiebung bei dieser Frequenz gemessen. π Phasenverschiebung der Drosselkette 2π 3π 4π 5π f in kHz 185 360 520 630 698 ∆t 0,5 0,48 0,46 0,44 0,42 in µs (π -Glied) Tabelle 6: Messungen am π -Glied und der Drosselkette 1.3.5 Beobachtung der Signalform der Drosselkette bei Reexion am Ende Die Drosselkette wurde am Ende kurzgeschlossen, der Anfang jedoch mit einem 220Ω-Widerstand verbunden, rechteckörmige Wechselspannung der Frequenz f=20kHz und der Amplitude Ue =6Vss angelegt. Am Kettenanfang wurde mithilfe des Oszilloskops ein stufenförmig abfallender Verlauf beobachtet (s. Abb. 4). Abbildung 4: Signalverlauf bei Einsatz des Hochpasses als Dierenzierglied 1.4 Messungen am Koaxialkabel 1.4.1 Messung des charakteristischen Widerstands Es wurde wie in Abschnitt 1.3.1 vorgegangen, jedoch wurde die Frequenz der Spannung zu f=1,1MHz gewählt und anstelle der Drosselkette ein Koaxialkabel verwendet. Der gemessene Widerstand betrug Z0 = 50Ω. 5 1.4.2 Direkte Messung der Verzögerungszeit τ 0 An das Kabel wurde rechteckförmige Wechselspannung derselben Frequenz und Amplitude wie vorher angelegt. Am Oszilloskop wurde die Zeitdierenz zwischen Eingangs- und Ausgangsspannung gemessen, diese betrug τ 0 = 0, 055µs. 1.4.3 Messung der Verzögerungszeit bei Kurzschluss des Kabels Wie in Abschnitt 1.3.5 wurde nun das Kabel kurzgeschlossen und am Kettenanfang die Zeitdifferenz der Maxima des Eingangs- und des Ausgangssignals unter Verwendung von Wechselspannung der Frequenz f=1,1MHz gemessen. Sie betrug 0,12 µ s. 1.4.4 Geometrische Daten des Kabels Die geometrischen Daten des Kabels sind l=10m, Cl =10,0m, ri =0,5m und ra =1,75mm. 2 Auswertung 2.1 Auswertung des Übertragungsverhaltens des einfachen Vierpols 2.1.1 Hochpass Aus den gemessenen Werte für die Ausgangsspannung kann das Abschwächungsverhältnis Ua Ue be- rechnet werden. Die Zeitdierenz zwischen den aufeinanderfolgenden Maxima wird nach ∆ϕ = 360◦ · f ∆t in die Phasenverschiebung in Winkelgrad umgerechnet. Beides ist in Tabelle 7 darge- stellt. R in kΩ Ua Ue ∆ϕ ◦ in 1 10 100 1000 0,010 0,095 0,700 0,975 91,8 79,6 45,9 6,1 Tabelle 7: Abschwächungsverhältnis und Phasenverschiebung am Hochpass Der theoretische Verlauf des Abschwächungsverhältnisses ergibt sich nach |Ua | 1 =r 2 , |Ue | 1 + ff0 (1) für die Phasenverschiebung gilt ϕ = arctan f0 . f In Abb. 5 ist das berechnete Abschwächungsverhältnis durchgezogen über (2) log f f0 dargestellt, mit Kreuzen wurden die gemessenen Werte eingezeichnet. Es ist deutlich erkennbar, dass bei niedrigen Frequenzen das eingehende Signal sehr stark abgeschwächt wird, bei hohen so gut wie nicht mehr. Die gemessenen Werte liegen sehr an der berechneten Kurve, jedoch leicht darunter. Dies lässt sich durch die Verluste in der Schaltung erklären. 6 Weiterhin ist in Abb. 5 der Verlauf der berechneten Phasenverschiebung gestrichelt dargestellt, die gemessenen Werte wurden mit Sternen markiert. Diese weichen leicht davon ab, insgesamt stimmt der Verlauf aber mit dem theoretisch erwarteten überein. ϕ[◦ ] Ua Ue 1 90 75 60 45 0.8 0.6 0.4 30 15 0.2 0 -2.5 -2.0 -1.5 -1 -0.5 0 0.5 1 1.5 2 log( ff0 ) Abbildung 5: Übertragungsverhalten und Phasenverschiebung des Hochpasses Abschwächungsverhältnis: berechneter Verlauf durchgezogen, Messwerte als Kreuze Phasenverschiebung: berechneter Verlauf gestrichelt, Messwerte als Sterne 2.1.2 Tiefpass Das Abschwächungsverhältnis und die Phasenverschiebung für den Tiefpass ist in Tabelle 8 dargestellt. R in kΩ Ua Ue ∆ϕ ◦ in 1 10 100 1000 1,000 1,000 0,713 0,100 0 -6,12 -42,84 -79,56 Tabelle 8: Abschwächungsverhältnis und Phasenverschiebung am Tiefpass Der theoretische Verlauf des Abschwächungsverhältnisses ist für den Tiefpass |Ua | 1 =r 2 , |Ue | 1 + ff0 (3) für die Phasenverschiebung gilt nun ϕ = arctan 7 f . f0 (4) In Abb. 6 ist wieder das berechnete Abschwächungsverhältnis durchgezogen über log f f0 dar- gestellt und die gemessenen Werte mit Kreuzen eingezeichnet. Hier ergibt sich ein zum Hochpass komplementäres Bild: tiefe Frequenzen passieren nahezu ungehindert, hohe werden jedoch erheblich gedämpft und deren Phase verschoben. Der berechneten Verlauf der Phasenverschiebung ist wieder gestrichelt dargestellt, die gemessenen Werte ebenfalls mit Sternen markiert. Auch hier weichen die Messwerte der Abschwächung nur wenig, die der Phasenverschiebung etwas stärker vom berechneten Verlauf ab. Auch hier ist aber eine gute Übereinstimmung festzustellen. −ϕ[◦ ] Ua Ue 1 90 0.8 0.6 0.4 75 60 45 30 0.2 15 0 -2.5 -2.0 -1.5 -1 -0.5 0 0.5 1 1.5 2 log( ff0 ) Abbildung 6: Übertragungsverhalten und Phasenverschiebung des Tiefpasses Abschwächungsverhältnis: berechneter Verlauf durchgezogen, Messwerte als Kreuze Phasenverschiebung: berechneter Verlauf gestrichelt, Messwerte als Sterne 2.2 Vierpol als Dierenzier- bzw. Integrierglied 2.2.1 Hochpass als Dierenzierglied Beim Hochpass wird in entsprechenden Frequenzbereichen das Eingangssignal dierenziert. Dies bedeutet im Fall von Dreieckspannung, dass die auf- und absteigenden Flanken steiler werden. Im Extremfall führt das zunächst zu einem konstanten Wert der Ausgangsspannung während der aufsteigenden Flanke des Dreiecks und einen konstanten, aber niedrigeren Wert bei der absteigenden Flanke. An den Stellen, an denen die Flanke wechselt, ist die Dreiecksspannung nicht dierenzierbar. Daher ist an diesen Stellen ein Sprung in der Rechteckspannung zu erwarten. Dieses Verhalten wird tatsächlich auch beobachtet, je kleiner der Widerstand, desto besser entspricht die Ausgangsspannung einer Rechteckspannung (wobei die Amplitude dabei deutlich abnimmt). Dies entspricht der Erwartung, für f f0 gute Dierenziereigenschaften zu beob- achten, da für kleine Widerstände die Grenzfrequenz gemäÿ f0 = 1 2πRC berechnet werden kann und somit für kleine Widerstände die Grenzfrequenz groÿ wird. Allerdings wird in diesem Frequenzbereich das Signal deutlich abgeschwächt, wie in Abb. 5 zu erkennen ist. 8 2.2.2 Tiefpass als Integrierglied Der Tiefpass wirkt bei entsprechenden Frequenzen als Integrierglied, also gerade entgegengesetzt wie der Hochpass. Die steilen Sprünge der Rechteckspannung werden aufgeweicht, sodass im Extremfall die Rechteckspannung zu Dreieckspannung transformiert wird. Mit steigendem Widerstand konnte dieses Verhalten beobachtet werden, auch hier wurde die Amplitude dabei jedoch erheblich kleiner. Dies entspricht wiederum der Erwartung, bei f f0 gute Integriereigenschaften zu nden, da die Grenzfrequenz für groÿe Widerstände klein wird, der Tiefpass im Bereich groÿer Frequenzen das Signal jedoch erheblich abschwächt. 2.2.3 Weitere Messungen mit dem Dierenzier- und Integrierglied Testweise wurde sinusförmige Wechselspannung an das Dierenzierglied angelegt. Wenig überraschend wurde diese in phasenverschobene, aber immer noch sinusförmige Wechselspannung transformiert. Des Weiteren wurde an das Integrierglied Dreiecksspannung angelegt. Das erwartete Verhalten, parableförmige Flanken zu beobachten, wurde bestätigt. Schlieÿlich wurde an das Dierenzierglied noch Rechteckspannung angelegt. Wie erwartet, wurde diese zu einzelnen Spannungspulsen (Peaks) transformiert. 2.3 Messungen am π-Glied und einer sechgliedrigen Drosselkette 2.3.1 Bestimmung des charakteristischen Widerstands der Drosselkette Der theoretische Wert des charakteristischen Widerstands der Drosselkette ist für kleine Frequenzen (f f0 , wie in der Messung verwendet): (0) Z0 r ≈ L C Mit den angegebenen Daten der Drosselkette berechnet er sich zu Wert beträgt Z0 = 185Ω. (5) (0) Z0 = 219Ω. Der gemessene Die Einstellung war jedoch nicht sonderlich genau, da einerseits die beobachtete Rechteckspannung trotz aller Bemühungen immer Verzerrungen aufwies. Auÿerdem war die Skala des Widerstands sehr grob, sodass ein groÿer Ablesefehler in Kauf genommen werden musste. 2.3.2 Bestimmung der Grenzfrequenz der Drosselkette Der theoretische Wert für die Grenzfrequenz ist 1 f0 = √ . π LC (6) Mit den angegebenen Daten der Drosselkette ergibt dies f0 =726kHz, experimentell wurde die Grenzfrequenz zu 720kHz bestimmt. Auch dies war mit einer gewissen Unsicherheit behaftet, da die Ausgangsspannung schon bei kleineren Frequenzen schwankte und die Ablesegenauigkeit am Oszilloskop nicht besonders hoch war. Dennoch stimmt die gemessene Grenzfrequenz sehr gut mit der berechneten überein. 9 2.3.3 Berechnung der Kapazität der Kondensatoren und der Induktivität der Spulen Unter Verwendung der genäherten Formel für den charakteristischen Widerstand kann die Kapazität des Kondensatorpaares gemäÿ C= 1 πZ0 f0 und die Induktivität der Spule zu L= Z0 πf0 be- rechnet werden. Dies ergibt mit den gemessenen Gröÿen den Wert C=2,39nF, also C/2=1,19nF µ und L=81,8 H. Beide Werte stimmen im Rahmen des groÿen Fehlers des charakteristischen µ Widerstandes gut mit den angegebenen Werten C/2=1nF und L=96 H überein. 2.3.4 Bestimmung der Phasenverschiebung der Drosselkette Die Phasenverschiebung der Drosselkette lässt sich nach der Formel ∆ϕ = 2n arcsin f f0 (7) berechnen. Die berechneten Werte sind mit den Messwerten, die gemäÿ ∆φ = 2πf ∆t in von der Zeitdierenz aufeinanderfolgender Maxima in die Phasenverschiebung umgerechnet wurden, in Tabelle 9 aufgeführt. Dabei mussten für die Drosselkette Phasenverschiebungen, die gröÿer als 2π waren, noch korrigiert werden, da dies am Oszilloskop nicht ersichtlich war. Auÿerdem ist in der Tabelle das Verhältnis der gemessenen Phasenverschiebung der Drosselkette zur gemessenen Phasenverschiebung des einzelnen π -Gliedes f in kHz 10 ∆φ/π π -Glied, ∆φ/π π -Glied, ∆φ/π ∆φ/π dargestellt. 100 300 500 600 650 690 berechnet 0,01 0,09 0,27 0,48 0,62 0,71 0,8 gemessen 0 0,08 0,27 0,46 0,55 0,57 0,61 Drosselkette, berechnet 0,05 0,53 1,63 2,9 3,71 4,23 4,79 Drosselkette, gemessen 0,05 0,52 1,56 2,8 3,62 4,13 4,72 - 6,5 5,78 6,09 6,56 7,22 7,77 ∆φDK /∆φπ Tabelle 9: Messungen am π -Glied und der Drosselkette Es ist deutlich zu sehen, dass die gemessenen Phasenverschiebungen für kleine Frequenzen recht gut mit den berechneten übereinstimmen. Bei gröÿeren Frequenzen treten Abweichungen auf, insbesondere beim einzelnen π -Glied. Das Verhältnis sollte idealerweise immer 6 sein, da eine sechsgliedrige Drosselkette eingesetzt wird. Tatsächlich weicht es davon jedoch ab, da auch die einzelnen Phasenverschiebungen schon Abweichungen zeigen. Aus den Phasenverschiebungen am gen vonganzzahligen Vielfache von π π -Glied bei denselben Frequenzen, die Phasenverschiebunan der Kette bewirken, kann nach der Gleichung f0 = f sin kπ 2n (8) jeweils die Grenzfrequenz bestimmt werden. Die Werte sind in Tab. 10 festgehalten. Hier konnte kein vernünftiger Zusammenhang zwischen der Phasenverschiebung der Drosselkette (DK) und dem einzelnen π -Glied festgestellt werden. Jedoch liegen alle Grenzfrequenzen nahe an der gemes- senen sowie an der theoretisch berechneten. Der Mittelwert aus den in der Tabelle aufgeführten Grenzfrequenzen ist 724kHz, dieser stimmt exzellent mit dem theoretisch berechneten überein. 10 π Phasenverschiebung der DK 2π 3π 4π 5π f in kHz 185 360 520 630 698 ∆ϕ/π am π -Glied ∆ϕDK /∆ϕπ 0,09 0,17 0,24 0,28 0,29 10,81 11,57 12,54 14,43 17,06 f0 714,8 720,0 735,4 727,5 722,6 der Drosselkette Tabelle 10: Messungen am π -Glied und der Drosselkette 2.3.5 Signalform der Drosselkette bei Reexion am Ende Zu erwarten ist die Überlagerung der einlaufenden Rechteckspannung mit der reektierten, wobei aufgrund der Reexion am Kettenende und dem damit verbundenen Phasensprung destruktive Interferenz stattndet. Beobachet wird jedoch ein stufenweise abfallender Verlauf der eektiven Spannung. Dies kann durch Reexionen an jedem einzelnen π -Glied erklärt werden. 2.4 Koaxialkabel 2.4.1 Charakteristischer Widerstand des Kabels Der gemessene Widerstand des Kabels wurde zu 50Ω bestimmt. Koaxialkabel mit diesem Widerstand werden in der Praxis häug eingesetzt. 2.5 Verzögerungszeit des Kabels, direkte Messung Die gemessene Verzögerungszeit beträgt τ10 = 0, 0055 µms . 2.6 Verzögerungszeit des Kabels bei Kurzschluss Die gemessene Verzögerungszeit beträgt nun τ20 = 0, 006 µms . Diese stimmt also im Rahmen der Ablesegenauigkeit recht gut mit der vorher gemessenen überein. 2.7 Relative Dielektrizitätskonstante des Kabels Die relative Dielektrizitätskonstante des Kabels wird auf drei Arten berechnet: 1. Ausschlieÿlich aus geometrischen Daten gemäÿ Cl r (Cl , ri , ra ) = ln 2π0 l Dies ergibt ra ri , (9) r (Cl , ri , ra ) = 2, 08. 2. Aus der Verzögerungszeit nach r (τ 0 ) = damit ist r (τ10 ) = 2, 72 bzw. r (τ20 ) = 3, 24. 11 c2 τ 02 , µr (10) 3. Aus dem charakteristischen Widerstand und geometrischen Daten mit der Formel (0) r (Z0 , ri , ra ) Hier erhält man c2 µ20 µr 2 = ln 4π 2 Z02 ra ri . (11) (0) r (Z0 , ri , ra ) = 2, 26. Alles in allem liegen die relativen Diektrizitätskonstanten in derselben Gröÿenordnung, weichen aber doch stark voneinander ab. Insbesondere hat der Fehler in der Verzögerungszeit deutliche Auswirkungen. 12