4. Servoantriebe
Werbung

4.
Servoantriebe
Servomotoren werden, kombiniert mit geeigneter Steuerelektronik wie Servoverstärker und
Servoumrichter, in zunehmenden Umfang dort eingesetzt, wo Drehzahlen in Hochlauf- und
Bremsbetrieben kurzzeitig zu verändern sind. Servomotoren lassen sich in wenigen Millisekunden
aus dem Stillstand auf ihre Nenndrehzahl beschleunigen, in derselben Zeit abbremsen und in ihrer
Drehrichtung umsteuern (reversieren). Sie werden als hochdynamische, beschleunigungsoptimierte Antriebsmaschinen zur Regelung von Winkeln, Lagen und Wegen eingesetzt. Beim
Verfahren von Wegen arbeiten sie im kontinuierlichen Rundlaufbetrieb, für Positionieraufgaben
mit hohem Auflösungsvermögen für die Winkellage.
Anwendungsbereiche sind z.B. Transferstraßen, Druckmaschinen, Handhabungs- und Transportanlagen, Industrieroboter sowie als Vorschubantrieb in numerisch gesteuerten Werkzeugmaschinen.
Eigenschaften von Servomotoren:
höchste Dynamik
große Winkelbeschleunigung,
guter Rundlauf, auch bei kleinen Drehzahlen mit n 1 min-1,
hohe Drehzahlsteifigkeit,
hohe Überlastbarkeit,
gute Positioniergenauigkeit,
Einsatz im Vierquadrantenbetrieb.
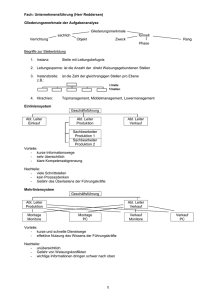
4.1 Bauarten von Servomotoren
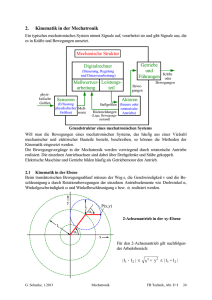
Man unterscheidet Motoren mit Scheibenläufer und Langläufermotoren. Scheibenläufer haben
eine axiale Feldführung, Langläufer die klassische radiale Feldführung. Beide Formen gibt es für
Gleich- und Drehstrom. Bis auf die Drehstrom-Asynchronmotoren werden sie meist permanentmagnetisch erregt. Noch sind Gleichstrommotoren mit elektromechanischer Kommutierung über
Flach- oder Trommelkommutatoren weit verbreitet.
N S
BE
L+
N
IA
L+
B I
A
E
L
L
S
BE
N S Scheibenläufermotor
permanenterregter Langläufermotor
Aufbauprinzip von Servomotoren
Der Trend geht zur elektronischen Kommutierung wie bei bürstenlosen Gleichstrom-Servomotoren oder bei Drehstrom-Synchron-Servomotoren in Scheiben- oder Langläuferbauweise. Bei
ihnen befinden sich die Dauermagnete auf dem rotierenden Läufer.
Drehstrom-Asynchron-Servomotoren werden in vielen neuen Anwendungen mit Servo-Frequenzumrichtern (feldorientierter Regelung) eingesetzt.
Schrittmotoren im Mini- oder Mikroschrittbetrieb können als Servoantriebe eingesetzt werden.
Rückführsysteme mit Lagesensoren werden in Servomotoren integriert bzw. an ihnen angebaut.
Häufig werden Servomotoren mit integriertem Getriebe ausgeführt. Servomotor, Rückführsystem und Getriebe bilden dann eine mechanische Einheit. Über Steckverbinder (Energieund Rückführsystem) wird der Servomotor mit der Steuereinheit verbunden.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
44
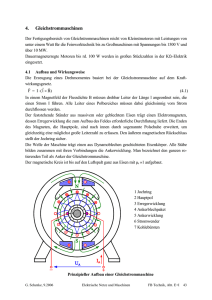
Erregerkreiswerkstoffe
Mit Ausnahme der Drehstrom-Asynchronmotoren sind Servomotoren heute nahezu ausschließlich mit Permanentmagneten bestückt, die konstruktionsmäßig vor Entmagnetisierung zu
schützen sind.
Magnetwerkstoffe sind Samarium-Kobalt (SmCo), Neodym-Eisen-Bor (NdFeB), Hartferrit und
Aluminium-Nickel-Kobalt (AlNiCo).
Werkstoff
SmCo
NdFeB
Hartferrit
AlNiCo
Remanenzflussdichte
BR in mT
980 ... 1050
1150 ... 1300
370 ... 390
1250 ... 1350
Koerzitivfeldstärke
HC in kA/m
700 ... 780
600 ... 800
230 ... 245
55 ... 59
Motorkenndaten
Das Nenndrehmoment MN (Bemessungsdrehmoment) ist das im Dauerbetrieb bei Nenndrehzahl
nN an der Welle abnehmbare Drehmoment, ohne dass sich der Motor unzulässig erwärmt.
Der Nennstrom IN (Bemessungsstrom) fließt bei Belastung mit Nennmoment bei Nenndrehzahl
an Nennspannung.
Das Impulsdrehmoment MImp (Spitzendrehmoment) ist das maximal zulässige Drehmoment,
bei dem weder die mechanischen Berstwerte (Wellenschaden) noch die maximal zulässigen
Kurzzeitgrenzströme überschritten werden. Es kann den drei- bis zehnfachen Wert des Nenndrehmoments aufweisen und verleiht den Servomotoren ihre hohe Dynamik.
Der Kurzzeitgrenzstrom IImp (Impulsstrom) fließt bei Impulsdrehmoment. Die Strombegrenzung wird auf den jeweiligen Scheitelwert des Impulsstroms eingestellt, da sonst bleibende
Abmagnetisierung der Dauermagnete erfolgt.
Das theoretische Stillstandsmoment M0 ist gleich dem theoretischen Dauerdrehmoment bei
Drehzahl Null.
Das statische Stillstandsmoment Ms (reduziertes M0) ist bei Schleichfahrt n 1 min-1 oder bei
blockierter Welle für längere Betriebszeiten (z.B. t 10 min) zulässig. Für kürzere Belastungsphasen ist eine Belastung mit Nenndrehmoment zulässig.
Der Regelungsfaktor kN gibt an, wie sich bei konstanter Klemmenspannung die Motordrehzahl
ändert, wenn an der Welle eine zusätzliche Belastung auftritt. Er entspricht n/ M = kN in der
n = f{M}-Kennlinie.
Die mechanische Zeitkonstante m hängt direkt vom Massenträgheitsmoment J ab ( m = kN · J).
Die elektrische Zeitkonstante e entspricht bei Servo-Gleichstrommotoren A und bei ServoDrehstrommotoren 'L.
Thermische Zeitkonstante heißt die Zeit, in der bei blockierter Welle und I = IN etwa 63 % der
Endübertemperatur erreicht werden. Sie ist von den Wärmeübergangswiderständen abhängig.
Gleichstrom-Scheibenläufermotor
Das Gehäuse besteht vorwiegend aus Aluminium. Vorderes und hinteres Lagerschild (Weicheisen
als magnetischer Rückschluss) umschließen die Läuferscheibe, Kohlebürsten, Lager und das
Magnetsystem. Das Magnetsystem besteht aus axial angeordneten Dauermagneten (vorwiegend
AlNiCo).
Die Ankerscheibe bildet eine trägheitsarme Läuferscheibe aus Isolierstoff, auf die Leiterbahnen
als Kupferwicklung aufgebracht sind (fotochemisches Ätzverfahren oder aufgeklebte Kupferfolie). Die Stromzuführung erfolgt meistens über axial angeordnete Kohlebürsten.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
45
Gleichstrom-Langläufermotor
Gleichstrommotoren mit Langläufer und Stromwender werden als dauermagneterregte und selten
als fremderregte Motoren hergestellt. Häufig werden sie in der Bauform B5 mit rundem oder
quadratischem Einbauquerschnitt als selbst- oder fremdgekühlte Motoren ausgeführt.
Der Anker besteht aus einem schräggenuteten Blechpaket mit kleinem Durchmesser und normaler
Gleichstromankerwicklung. Die Stromzuführung erfolgt je nach Drehzahl über 4, 6 oder 8 Kohlebürsten, die auf einen Kommutator mit hoher Lamellenzahl führen.
Die hohe Lamellenzahl ermöglicht hohe Drehzahlen und das schräggenutete Blechpaket guten
Rundlauf bei kleinsten Drehzahlen. Regelbereiche von 1:10000 werden in Verbindung mit
Servoverstärkern erreicht.
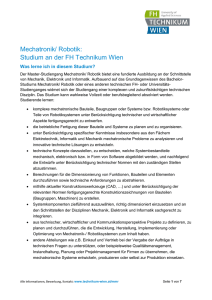
Bürstenloser Gleichstrom-Servomotor
In diesem "elektronisch kommutierten Gleichstrommotor" ist das Konstruktionsprinzip des
mechanisch kommutierten Motors umgekehrt. Mit Ausnahme der Wicklungen entspricht der
mechanische Aufbau dem des permanenterregten Drehstrom-Synchron-Servomotors.
Elektronisch kommutierte Gleichstrommotoren haben drei oder mehr Wicklungsstränge. Kleine
Drehmomentenschwankungen innerhalb einer Umdrehung werden mit 3-, 6- oder 9-phasigem
Gleichstrom von block- oder trapezförmigem Verlauf erreicht.
Bürstenlose Gleichstrom-Servomotoren werden immer mit Rotorlagegeber und bürstenlosem
Drehzahlgeber betrieben. Leistungen von 0,3 bis 30 kW sind üblich.
Die elektronische Kommutierungseinrichtung bestromt die Wicklungen drehwinkelabhängig.
Der Motor weist Nebenschlussverhalten auf. Sein Drehmoment ist vom Strom, seine Drehzahl
von der Umschaltfrequenz der Kommutierungseinrichtung abhängig. Grenzen für die
Höchstdrehzahl bilden die Kugellager-Lebensdauer und die Fliehkräfte, die auf die Magnetbefestigung wirken.
Steuersignal vom Lagegeber
N
S
S
N
Drehzahlregelgerät
mit Ansteuerlogik
Prinzipschaltung eines sechssträngigen Gleichstrommotors
mit elektronischer Kommutierung
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
46
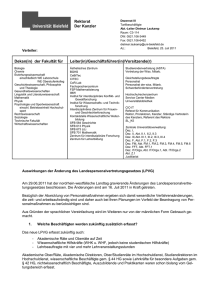
Permanentmagnet
Läufer mit Wicklung
GleichstromTachogenerator
Kollektor mit
Kohlebürsten
Ständer mit
Wicklung
Bürstenloser
Tachogenerator mit
Rotorlagegeber
Permanentmagnet
mechanische Kommutierung
elektrische Kommutierung
Vergleich zweier Stabläufer-Gleichstrommotoren mit mechanischer und elektrischer
Kommutierung von gleicher Antriebsleistung
Drehstrom-Asynchronservomotoren
Drehstrom-Asynchronservomotoren gibt es für Nennleistungen PN = 0,3 kW bei nN = 3000 min-1
bis rd. 100 kW bei 1500 min-1.
Asynchronmaschine und Messgebersystem für Drehzahl und Rotorlage bilden eine mechanische
Einheit.
Um bei der Asynchronmaschine ein ähnlich gutes Führungs- und Lastverhalten wie bei der
Gleichstrommaschine zu erzielen, wird grundsätzlich das Prinzip der feldorientierten
Regelung (Transvektorregelung) angewendet. Die Versorgungs- und Regelungseinrichtungen
bilden Servo-Frequenzumrichter mit mehreren schnellen Mikroprozessoren, die eine hohe
Zahl von Informationen mit spezieller Servo-Software schnell verarbeiten.
Drehstrom-Synchronservomotoren
Drehstrom-Synchronservomotoren sind permanenterregte Synchronmaschinen mit einer dreisträngigen Statorwicklung und permanenterregtem Rotor. Die Synchronmaschine bildet mit
einem absoluten Lagegebersystem eine mechanische Einheit. Im Gegensatz zum elektronisch
kommutierten Gleichstrommotor dient die Wicklung hier zur Erzeugung eines Drehfeldes, so dass
sie mit annähernd sinusförmigem Drehstrom zu speisen ist (Wirkungsweise der
permanenterregten Drehstrom-Synchronmaschine).
Drehstrom-Synchronservomotoren gibt es für Nennleistungen PN = 0,2 kW bei nN = 4000 min-1
bis rd. 50 kW bei 2000 min-1. Ausführungen sind als Scheibenläufer bis P 5 kW oder als Kurzbzw. Langläufer verfügbar.
Das Massenträgheitsmoment von Drehstrom-Synchronservomotoren ist relativ klein, so dass
hohe Dynamik mit ihnen ereicht wird. Die Kühlung ist einfach, da im permanenterregten Läufer
nur geringe Wirbelstromverluste entstehen.
Servo-Frequenzumrichter bilden die Versorgungs- und Regelungseinrichtungen bei DrehstromAsynchronservomotoren und bei Drehstrom-Synchronservomotoren. Die absolute Rotorlage
muss beim Synchronservomotor jedoch immer bekannt sein.
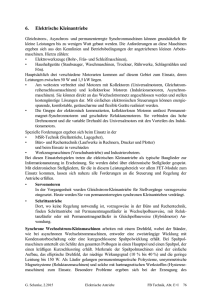
Synchron-Servomotoren MCS
Die Servomotoren MCS sind Drehstrom-Synchronservomotoren mit einem äußerst geringen
Massenträgheitsmoment und einer extremen Überlastfähigkeit. Durch die kontinuierliche
Temperaturmessung mit einem eingebauten Temperatursensor wir ein temperaturunabhängiges
optimales Regelungsverhalten erreicht.
Durch die SepT-Bauform der Statorwicklung (Sinus-Einzelpol-Technologie) in Kombination mit
Hochenergiemagneten aus Neodym-Eisen-Bor (NdFeB) wird bei den MCS-Servomotoren
erreicht, dass Wicklung und Magnete ein verzerrungsfreies sinusförmiges Arbeitsfeld im Motor
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
47
erzeugen. Da kein verzerrtes Feld stört, sind die Rundlaufeigenschaften besonders gut. Lästige
Rastmomente gibt es nicht. Die Leistungsdichte ist hoch, da die Wicklung praktisch nur das
Arbeitsfeld erzeugt. Der Kupferdraht wird nicht wie bei herkömmlichen Statoren durch einen
engen Nutschlitz in die Nut eingebracht, sondern der Pol wird direkt gewickelt. Durch diesen
Kunstgriff passt wesentlich mehr Kupfer in den Stator. Dies führt zu einem kompakten
Aufbau der Motoren und steigert die
Leistungsdichte. Gleichzeitig sind die Pole
sehr fest gewickelt und dadurch extrem
widerstandsfähig und vibrationsfest. Die
Leistungsdichte und die Laufgüte steigen
an, ohne dass die Zuverlässigkeit beeinträchtigt wird. Ein verstärkter Isolationsaufbau mit thermischer Reserve (Lackdraht
nach Isolationsklasse H, Ausnutzung nach
F) sorgt für eine hohe Lebensdauer der
Wicklung.
Bei den Kompaktservomotoren MCS
werden Neodym-Eisen-Bor-Magnete der
neuesten Generation eingesetzt. Sie
verfügen über eine hohe Energiedichte und
Korrosions- und Entmagnetisierfestigkeit
auch bei hohen Temperaturen.
Statorwicklung des Servomotors MCS in
SepT-Aufbau (Sinus-Einzelpol-Technologie)
In den Kompaktservomotoren MCS sind
große Lager eingesetzt. Dadurch lassen
sich auch starke Radialkräfte an der Welle
aufnehmen, ohne dass die Lagerlebensdauer leidet. Die Lager sind mit langlebigem, temperaturfestem Fett ausgestattet
und die Wellen aus standfestem Material
gefertigt. Sie sind für hohe Radial- und
Drehmomentbelastungen ausgelegt.
Synchron-Servomotor der Baureihe MCS
Schrittmotoren als Servoantriebe
Schrittmotoren mit integriertem Gebersystem können grundsätzlich als Servoantriebe eingesetzt
werden. Die Steuereinheit sollte dann neben dem Voll- und Halbschrittbetrieb auch den Minioder Mikroschrittbetrieb beherrschen. Bis zu 250 Mikroschritte pro Vollschritt sind mit neueren
Mikroschrittsystemen möglich.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
48
4.2 Lagegeber
Servoantriebe werden mit integrierten Lagegebern betrieben. Dieses sind Resolver (Drehmelder),
Inkrementalgeber oder Sin-, Cos-Geber.
Resolver
In Aufbau ähnelt der Resolver einem kleinen Elektromotor mit Präzisionswicklung. Der Stator
trägt zwei Wicklungsgruppen, deren Wicklungsebenen senkrecht aufeinander stehen, also
räumlich um 90° zueinander versetzt sind. Der Rotor des Systems trägt eine Wicklung, die über
Schleifkontakte mit Spannung versorgt werden kann, oder an denen man eine im Rotor induzierte
Spannung messen kann.
uS1
Rotor
uR
uR
uS2
u(t)
t
uS1
Stator
uS2
Funktionsprinzip des Resolvers
Phasenauswertung bei Speisung der
Statorwicklungen
Speist man die Statorwicklungen mit einer Wechselspannungen URef von fRef 4 kHz, dann misst
man die im Rotor induzierte Spannung UR und ermittelt hieraus die Phasenverschiebung der
Rotorspannung gegenüber der Referenzspannung. Die Phasenverschiebung entspricht dem Verdrehwinkel der Rotorwicklung gegenüber der Statorwicklung.
Die Spannung am Rotor ergibt sich aus den in der Rotorwicklung induzierten Spannungsanteilen
aus beiden Statorwicklungen:
u R (t ) u S1 (t ) cos
u S2 ( t ) sin
(4.1)
Für die Statorspannungen gilt mit s = 2 · fRef:
u S1 (t) û Ref sin s t
(4.2)
u S2 ( t ) û Ref sin( s t - /2) û Ref cos s t
Aus den Gl. 8.1 und 8.2 ergibt sich die Rotorspannung:
u R (t) û Ref (sin s t cos cos s t sin )
(4.3)
u R (t) û Ref sin( s t
)
Aus der Phasenverschiebung zwischen uR(t) und uS1(t) lässt sich der Verdrehwinkel der Rotorwicklung gegenüber der Statorwicklung ermitteln.
Speist man den Rotor mit der Referenzspannung URef und misst die beiden in den Statorwicklungen induzierten Spannungen US1 und US2, so haben diese den Wert:
u S1
K U Ref sin
u S2
K U Ref cos
(4.4)
Die Referenzspannung wird durch den Verdrehwinkel in seinem Wert amplitudenmoduliert.
Aus der Messung der Spannung an einer Statorwicklung kann man Winkelwerte für in einem
Quadranten ablesen, durch Vergleich beider Ausgangsspannungen wird es möglich, Winkelwerte
zwischen 0° und 360° eindeutig zu messen.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
49
Hüllkurven der modulierten Referenzspannung
uS1
uS2
n·
Amplitudenauswertung bei Speisung
der Rotorwicklung
1 Umdrehung
uS1
uS2
Da man jederzeit innerhalb einer Umdrehung aus der Messung zweier Spannungen eindeutig die
Winkellage des Rotors bestimmen kann, spricht man von einer absoluten Lagemessung. Soll für
die Lagebestimmung eines Linearantriebs die Winkellage über viele Umdrehungen des Resolvers
bestimmt werden, so muss man die Winkelwiederholungen mitzählen, um den absoluten
Lagemesswert zu bestimmen. Man spricht deshalb von einer zyklischen absoluten Messung.
Bei einer Frequenz fRef 4 kHz der Referenzspannung kann man Winkelauflösungen von 10
Winkelminuten erreichen. Die kleine Bauweise und die hohe Genauigkeit sind besondere Vorteile
des Resolversystems, weshalb sie häufig zur Lagemessung in Servoantrieben und Industrierobotern verwendet werden.
Problematisch ist die mechanische Übertragung der Rotorspannung über Schleifkontakte oder
Bürsten. Um störende Kapazitäten und Übergangswiderstände so klein wie möglich zu halten,
werden meist Edelmetallkontaktpaarungen verwendet.
Winkelmeßsystem mit kodierter Maßverkörperung
Besitzt der Geber n Spuren, so kann die absolute Lage auf 2n Teile je Umdrehung bestimmt werden (selten). Einfache Geber mit 26 Teilen bis zu hochauflösenden Gebern mit 218 Teilen je
Umdrehung werden in der Mechatronik eingesetzt. Die einzelnen Spuren werden radial durch
eine fotoelektrische Abtasteinheit in jeder Spur abgetastet (teuer).
Die Teilung der am weitesten innenliegenden
E
und am feinsten geteilten Spur bestimmt die
D
Winkelauflösung des Meßsystems. Entlang
C
einer radialen Abtastlinie stellt dann die Hell-,
B
Dunkel-Kodefolge einen binären Zahlenwert
A
dar, der der zugehörigen Winkellage entspricht.
Die am häufigsten verwendete Codierung ist der
Gray-Code. Diese Codierung hat den Vorteil,
dass bei einem Übergang von einer Position zur
nächsten nur auf einem Ausgangskanal ein Signalwechsel stattfindet. Eine Mehrdeutigkeit der
Position durch die nachgeschaltete Auswertelogik während eines Positionswechsels ist ausgeschlossen.
Codescheibe mit Gray-Code
für Absolutwertgeber
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
50
Jede Codebahn wird von einer ihr zugeordneten optischen Schranke abgetastet. Das Ausgangssignal jeder Schranke wird verstärkt und auf eine Ausgangsstufe weitergeleitet. Die Position steht
direkt nach dem Einschalten an der Schnittstelle für BUS-Systeme parallel oder synchron-seriell
für SSI-Systeme zur Verfügung.
E
D
16
=1
8
4
=1
C
2
=1
B
=1
A
Umkodierung Gray Binär mit XOR
1
Ist eine Position zu erfassen, die über eine Umdrehung hinausgeht, muss ein MULTITURNAbsolutwertgeber eingesetzt werden. MULTITURN-Absolutwertgeber besitzen entweder ein
Untersetzungsgetriebe mit angebrachter absoluter Codescheibe oder einen integrierten Zähler in
dem die zurückgelegten Umdrehungen gespeichert werden. Der Zählerstand wird ebenfalls
parallel im Graycode ausgegeben.
/2
Inkrementalgeber
Die digitalen Geber auf optoelektronischer Basis arbeiten vorrangig nach dem Durchlichtverfahren, teilweise aber auch nach dem Reflexionsverfahren.
Das inkrementale Messverfahren benutzt als Maßverkörperung einen Tragkörper aus Glas, auf
dem eine Gitterteilung aus undurchlässigen Strichen und lichtdurchlässigen Lücken aufgebracht
ist. Anwendung finden Inkrementalgeber mit 512 bis 16384 (29 - 214) Strichen je Umdrehung
(selten 500 und 1000 Striche). Die um
versetzten Striche (Fenster) werden von zwei optoelektronischen Sensoren, die um /4 versetzt sind, abgetastet. Zusätzlich sind auf einer zweiten
Spur eine (Umfangsmarke) oder mehrere Referenzmarken aufgebracht.
Inkrementalgeber werden vorwiegend mit einer Gleichspannung von 5 V bis 8 V versorgt (TTLPegel). Das aufbereitete Signal des optoelektronischen Sensors 1 steht am Encoderanschluss als
A-Signal, das des Sensors 2 als B-Signal und das der Umfangsmarke als Z-Signal zur Verfügung
(zusätzlich häufig A , B und Z ).
2
1 und 2: optoelektronische Sensoren
Prinzip des Inkrementalgebers
1
/4
Die einzelnen Inkremente des Inkrementalgebers werden vorzeichenrichtig in einem VorwärtsRückwärts-Zähler aufsummiert.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
51
H
A
L
t
H
B
L
t
Impulsdiagramm
bei Rechtslauf
H
Z
L
t
H
A
L
t
H
B
L
t
H
Impulsdiagramm
bei Linkslauf
Z
L
t
Durch den einfachen Aufbau des Gebers und den geringen Aufwand für die Auswertung ist die
relative Lagebestimmung preiswert.
Nachteilig bei diesem Verfahren ist, dass bei Fehlzählungen durch Störsignale oder fehlende
Impulse die Fehler aufsummiert werden. Aus diesem Grund sind hohe Anforderungen an die
Störsicherheit des Systems gestellt. Mit dem Umfangsimpuls kann man den Vorwärts-RückwärtsZähler je Umdrehung synchronisieren.
Zur Lagebestimmung muss nach dem Einschalten eine bekannte Marke angefahren werden und
der Vorwärts-Rückwärts-Zähler auf einen Referenzwert gesetzt werden, der häufig Null ist
(Referenzfahrt).
Zur Erhöhung der Genauigkeit kann mit der XOR-Verknüpfung von Kanal A und B eine
Impulsverdoppelung erreicht werden. Die Flankenauswertung dieses Signals ermöglicht eine
Vergrößerung der Auflösung durch Impulsvervierfachung.
Sinus-Cosinus-Geber
Das SinCos-Geber-System ist eine Mischung aus Inkrementalgeber und Absolutwertgeber. Der
Absolutwert wird hierbei zunächst nur beim Einschalten des Gerätes gebildet und über eine RS485-Schnittstelle einem externen Zähler mitgeteilt, der dann von diesem Absolutwert aus
inkremental mit der analogen Sinus/Cosinus-Schnittstelle weiterzählt.
Damit eine hohe Auflösung auch bei großen Drehzahlen möglich ist, wird das Inkrementalgebersignal nicht wie üblich in digitalen Werten, sondern als analoge Sinus/Cosinusspannung
übertragen. Üblich sind Periodenzahlen von 512 oder 1024 pro Umdrehung.
Bei einer Periodenzahl von 512 pro Umdrehung entsteht bei einer Drehzahl n = 12000 min-1 nur
eine Frequenz f = 102,4 kHz, die problemlos auch über weite Strecken übertragbar ist. Bei Gebern
mit der Periodenzahl von 512 pro Umdrehung wird der digitale Absolutwert mit einer Auflösung
von 16384 Schritten pro Umdrehung ermittelt, so dass der Absolutwert gleich 1/32 der 512er
Periode ist.
Die digitale Absolutinformation kann beim Initialisieren nur auf ca. 3 Bogenminuten erfolgen,
da der Unschärfebereich bei 1/8 der 512er Periode liegt. Der Absolutwert wird nach dem
Einschalten der Geberversorgungsspannung oder nach einem Software-Reset innerhalb von 2
Sekunden übertragen.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
52
Nach dem Hochlauf der Betriebsspannung wird die "power up - Sequenz" des Gebers durchlaufen. Während der Initialisierung werden die Parameter übertragen. In der Betriebsart "Default
Serial Mode" wird der Absolutwert zu Beginn dieser Betriebsart übermittelt und mit der
Übertragung der Sinus- und Cosinussignale begonnen. In der anschließenden Betriebsart "User
defined Serial Mode" kann der Geberstatus überprüft werden. Nach einem Software-Reset
beginnt sofort die Initialisierung.
Encoder
Reset
Us
initialize
100 ms
Status
lesen
Default User definded
Default
Serial
Serial
initialize Serial
Mode
Mode
Mode
900 ms
100 ms
User definded
Serial
Mode
900 ms
Power up - Sequenz und Software-Reset
Der Zugriff zu den Prozessdaten, die zur eigentlichen Drehzahlregelung verwendet werden, also
den Sinus- und Cosinussignalen, ist praktisch immer "on line". Der Drehzahlregler hat bei
eingeschalteter Versorgungsspannung zu jeder Zeit Zugriff auf diese Informationen.
Der Signaloffset "REFSIN, REFCOS" liegt auf 2,5 V. Der Toleranzbereich beträgt 2,2 ... 3,4 V.
Der Nennwert für die Signal-Spitze-Spitze-Werte von SIN und COS beträgt 1 Vss. Der Toleranzbereich beträgt 0,9 ... 1,1 V. Der Messschritt nach Arcustangensbildung mit 12 bit Auflösung
beträgt 0,6 Bogensekunden. Die Fehlergrenzen des Prozesskanals liegen zwischen 18 und 40
Bogensekunden.
3,0 V
SIN
REFSIN
REFCOS
2,5 V
Signalspezifikation des
Prozessdatenkanals beim Drehen
der Welle im Uhrzeigersinn
COS
2,0 V
1 Periode = 360° / 512
Sinus-Cosinus-Geber sind als Singleturn- als auch als Multiturngeber mit einer zusätzlichen
Erfassung von 4096 Umdrehungen verfügbar.
Die Schnittstelle zum Motorregler besteht aus dem Prozessdatenkanal (4 Adern für die Sinus- und
Cosinussignale), aus dem Parameterkanal (2 Adern für RS 485) und aus der Spannungsversorgung (2 Adern).
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
53
4.3
Anwendung von Servoantrieben
Vorschubantriebe
Vorschubantriebe werden nicht nach einer Leistungsanforderung, sondern nach dem
erforderlichen Drehmoment ausgewählt. Dieses muss als statisches Stillstandsmoment auch noch
bei der Drehzahl n = 0 aufgebracht werden.
Speziell bei numerisch gesteuerten Werkzeugmaschinen ist der Drehzahlregelbereich > 1:10000.
Er umfasst den Vorschubbereich und den Eilgangbereich. Im Vorschubbereich (d.h. niedrige
Drehzahlen mit n 1 min-1 und große Drehmomente) wird bearbeitet, im Eilgangbereich (hohe
Drehzahlen und geringe Drehmomente) fährt die Maschine z.B. einen Drehmeißel in eine neue
Arbeitsposition. Für diese speziellen Aufgaben werden Drehstrom- und Gleichstromservomotoren
eingesetzt.
Antriebssysteme für Industrieroboter
Die Aufgabe der Servoantriebe ist es, die einzelnen Achsen zum Erreichen einer bestimmten
Position zu bewegen, den Endeffektor (z.B. Hand) zu orientieren und die Last in dieser Lage
festzuhalten.
Die dynamischen Anforderungen, die an Servoantriebe für Industrieroboter zu stellen sind, sind
sehr hoch, da die Gesamtdynamik der Roboterbewegung stark durch das getragene Handhabungsgewicht beeinflusst wird.
Moderne Industrieroboter können heute Verfahrgeschwindigkeiten von 2 m/s erreichen. Diese
Verfahrgeschwindigkeit wird wieder, wie bei der Tragfähigkeit, auf die Flanschplatte am
Handgelenk bezogen. Hohe Verfahrgeschwindigkeit ist bei Industrierobotern erwünscht, um
geringe Prozesszeiten in der Automatisierung zu erreichen.
Im Normalfall werden hohe Geschwindigkeiten nicht für die Gesamtbewegung des Handgelenkes
benötigt, sondern eher für die Einzelachsen bei gleichförmiger Bewegung des Handgelenkes
entlang einer Raumkurve (siehe 3.2).
Je größer der Industrieroboter ist, umso größer sind natürlich die Massenträgheitsmomente, mit
denen die Antriebssysteme umgehen müssen. Um den Roboterarm nicht dynamisch zu überlasten, nehmen daher die Maximalgeschwindigkeiten und -beschleunigungen mit zunehmender
Tragfähigkeit des Roboters ab.
Je höher die Verfahrgeschwindigkeit ist, umso geringer werden die Positioniergenauigkeit und die
Bahngenauigkeit. Das Einfahren in eine bestimmte Position soll in einer kurzen Zeit geschehen.
Hierzu wird eine große maximale Geschwindigkeit angestrebt und bei Annäherung an die
Position mit geringer Geschwindigkeit exakt positioniert.
Die Gesamtzeit für einen Bearbeitungszyklus hängt nicht direkt von der Summe aller Einzelfahrwege ab.
vmax
lange Bewegung
v
Erreichbare Bahngeschwindigkeit
in Abhängigkeit des
zurückzulegenden Weges
kurze Bewegung
s
Die Gesamtzeit tges für einen Bearbeitungszyklus kann bei gegebener Bahngeschwindigkeit v(s)
über den Fahrweg von s1 nach s2 berechnet werden. Für die mittlere Bahngeschwindigkeit v gilt:
v
1
s 2 - s1
s2
(4.5)
v(s) ds
s1
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
54
Die Gesamtzeit tges ergibt sich aus dem gesamten Fahrweg und der mittleren Bahngeschwindigkeit v:
t ges
s 2 - s1
v
(s 2 - s1 ) 2
(4.6)
s2
v(s) ds
s1
Zykluszeitabschätzungen sind schwierig; deshalb erfolgt häufig die Simulation des Prozesses auf
einem PC oder es sind Messungen an Versuchsaufbauten vorzunehmen.
Hohe Verfahrgeschwindigkeiten bei gleichzeitig hohen Positioniergenauigkeiten werden bei
Robotern für die Montage kleiner Teile benötigt. Ein typischer Einsatzfall hierfür ist die
Bestückung von Leiterplatten mit elektronischen Bauteilen. In diesem Fall ist eine große Zahl von
Montagevorgängen notwendig und die zurückzulegenden Wege sind klein.
Zum Erreichen sinnvoller Zykluszeiten benötigt man hohe Geschwindigkeiten und Beschleunigungen. Dabei sind gleichzeitig noch Positioniergenauigkeiten von 10 m - 20 m einzuhalten.
Bei einem solchen Roboter treibt der Servomotor ohne dazwischenliegende Getriebeelemente die
mechanische Rotationsachse.
Der Roboterarm muss sehr starr und massearm ausgeführt sein, um die hohen Beschleunigungen
zum Erreichen einer Bahngeschwindigkeit von 2 m/s auch auf kurzen Verfahrwegen zu erreichen.
Neben der Erhöhung der möglichen Bahnbeschleunigungen führt der Verzicht auf weitere
Getriebeelemente zu einer Erhöhung der Positioniergenauigkeit, da nun Spiel und Ungenauigkeit
in solchen Elementen wegfallen.
Um ausreichend kleine Verfahrwinkel der direkt angetriebenen Achse zu erreichen, muss ein
hochpoliger Servomotor eingesetzt werden.
Die Positioniergenauigkeit gibt an, wie genau ein Punkt im Arbeitsbereich erreicht wird. Die
Wiederholgenauigkeit gibt die relative Position zwischen Objekten an.
Servoantriebe mit Registerregelung
Bei Druckmaschinen, Papiermaschinen, Verpackungsmaschinen, Folienmaschinen und Textilmaschinen werden Servoantriebe mit Registerregelung eingesetzt.
Schwankungen bei den Materialeigenschaften und im Fertigungsprozess wirken sich störend auf
die Gleichmäßigkeit der Lage und Größe des Druckbildes aus. Der Registerregler kompensiert
diese Einflüsse ohne übergeordnete Steuerung.
Die im Servo-Umrichter integrierte Registerregelung richtet die Winkellage von Einzugswalzen,
Druckzylindern, Schneidwalzen oder anderen Bearbeitungsstationen auf die Lage des Druckbildes aus. Schnitte, Perforationen, Prägungen, Klebestellen usw. liegen immer genau dort, wo sie
liegen sollen.
Beim Insetter (Einziehwerk) wird eine vorbedruckte Bahn registerhaltig eingezogen, d.h. die
Bahn ist so dem Druckprozess zuzuführen, dass der Zweitdruck genau am Erstdruck ausgerichtet
wird. Hierzu werden die Lage des Erstdrucks und die Winkellage des Druckzylinders erfasst.
Über die Drehzahl der Insetterwalze wird der Zweitdruck exakt zum Erstdruck positioniert.
Mit moderner Servo-Registerregelung wird
die Registerhaltigkeit verbessert,
die Druckqualität erhöht und
die Makulatur (fehlerhafte Drucke) reduziert.
Dies bereits beim Hochfahren der Maschine.
Querschneider legen den Schnitt relativ zum Druckbild immer an die gleiche Stelle, auch wenn
die Lage des Druckbildes infolge von Inhomogenitäten beim Material oder in der Fertigung
schwanken sollte.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
55
Der Registerregler erfasst die Lage des Druckbildes und die Stellung des Schneidzylinders und
richtet die Winkellage der Schneidwalze exakt auf das Druckbild aus.
Das Schnittregister kann durch Einstellung weniger Parameter flexibel und schnell geändert
werden. Durch die "elektrische Welle" entfällt auch der mechanische Aufwand bei der Anpassung
des Querschneiders an die Vormaschine.
Servoantriebe mit Kurvenscheibenregelung
Mechanische Kurvenscheiben sind oft in Fertigungsmaschinen zu finden. Umstellung oder
Variation des Produktes bedeuten lange und umständliche Rüstzeiten.
Bei Servoantrieben mit Kurvenscheibenregelung können mehrere verschiedene Kurvenscheiben
gespeichert werden, so dass ein Umschalten zwischen diesen Kurven während der Produktion
verzögerungsfrei möglich ist. Hierdurch wird in automatisierten Fertigungsbetrieben eine hohe
Flexibilität erreicht.
Servo-Kurvenscheiben werden beispielhaft bei der Kuvertierung, der Flaschenabfüllung und dem
Konturenschneiden eingesetzt. Integrierte Zusatzfunktionen wie der elektronische Nockenschalter
und der markengesteuerte Kurvenstart können für viele Einsatzfälle genutzt werden.
y
y
y
x
x
y
x
x
Dehnung, Stauchung, Offset in x- und y-Richtung bei der Servo-Kurvenscheibe
Die Dehnung, die Stauchung und der Offset in x- und y-Richtung von abgespeicherten Kurven
erlauben eine einfache Anpassung bei Fertigungs- oder Produktänderungen.
Servoantriebe mit Positionierregelung
Mit dem Positionierregler kann die Punkt zu Punkt Positionierung auch mit Überschleifen mit
Servoantrieben realisiert werden. Grundsätzlich sind die Absolut- und die Relativ-Positionierung
möglich. Das Fahrprofil kann mit linearer und mit S-Rampe (ruckbegrenzt) gewählt werden.
Funktionen wie Referenzieren, Teach-in und Stand-by können genutzt werden.
Anwendung finden Servoantriebe mit Positionierregelung z.B. bei der Lagertechnik und
Verpackungsmaschinen.
Die Positionierregelung ermöglicht den absoluten Synchronlauf von mehreren Antrieben mit
Toleranzen von wenigen Bogenminuten als sog. "Elektrische Welle".
4.4 Servo-Umrichter 9300 für flexible Automatisierung
Die Servo-Umrichter der Familie 9300 mit abgestimmten Motoren- und Getriebemotorenprogramm ergeben ein optimales Antriebssystem. Durch integrierte Technologiefunktionen
entstehen intelligente Antriebe, die unterschiedliche Bewegungen der Maschinen untereinander
genau und präzise koordinieren können.
Flexible Automatisierungslösungen sind mit dem Antriebskonzept auf einer durchgängigen
Plattform möglich.
Als Bindung zu einem übergeordneten Leitsystem sind aufsteckbare Feldbusmodule für RS
232/485, InterBus-S, PROFIBUS oder Ethernet vorhanden. Als Systembus zwischen den ServoUmrichtern und/oder als Bindung zum übergeordneten Leitsystem wird CAN verwendet.
Die Servofamilie mit einheitlicher Hardware umfasst den Leistungsbereich 0,37 kW - 75 kW. Im
gesamten Leistungsbereich können Asynchron-Servomotoren und im unteren Leistungsbereich
bis 10 kW können für sehr hohe Dynamik Synchron-Servomotoren eingesetzt werden.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
56
Wahlweise stehen anflanschbare Getriebe als Schneckengetriebe, als Stirnradgetriebe oder als
Planetgetriebe zur Verfügung. Als kompakte Lösung wird der Servo-Getriebemotor in den
verschiedenen Kombinationen eingesetzt.
Leistungseinheit des Servo-Umrichters 9300
Die netzseitige Einspeisung erfolgt über eine ungesteuerte B6-Schaltung und einen Netzfilter. Der
Netzfilter reduziert den Netzstrom und begrenzt die EMV-Störungen durch geeignete Funkentstörmaßnahmen nach EN 55011 für die Grenzwertklassen A oder B.
Die Gleichspannungszwischenkreise mehrerer Servo-Umrichter können bei Verbund- oder
Mehrachsenanwendungen für den Energieaustausch verbunden werden. Für den Generatorbetrieb
reicht dann ein Bremschopper mit externem Bremswiderstand bzw. für geringe Generatorleistung
ein Bremsmodul (Chopper + Widerstand).
Alternativ bieten die Versorgungs- und Rückspeisemodule der Reihe 9340 besonders bei
Mehrachs- und Verbundantrieben Vorteile. Durch sie wird die Bremsenergie des ServoUmrichters über einen entsprechenden Netzfilter ins Netz zurückgespeist.
Aus der Zwischenkreisspannung erzeugt der kurzschlussfeste Pulswechselrichter die geforderte
3phasige, pulsförmige Wechselspannung mit variabler Frequenz für den Servomotor.
Die feldorientierte Regelung des Pulswechselrichters mit Vector Control (VVC) ermöglicht für
hohe Dynamik Drehmomente bis zu 150 % des Bemessungsdrehmomentes (Nenndrehmoment)
und hohe Stillstandsmomente.
L1
L2
L3
PE
L1 L2 L3 PE
+UG -UG
Versorgungs- / Rückspeiseeinheit 9340
L1 L2 L3 PE
+UG -UG
L1 L2 L3 PE
+UG -UG
Servo-Umrichter 9300
Servo-Umrichter 9300
PE
PE
PE
UVW
M
~
3
PE
UVW
M
~
3
Verbundbetrieb von zwei Servo-Umrichtern mit Netzrückspeisung
EMV-Probleme vermeiden:
Versorgungs- und Rückspeisemodul, die Antriebsregler und die Filter großflächig zur
geerdeten Montageplatte kontaktieren,
Schirm der Energieleitungen sorgfältig mit dem Schirmanschluss der Geräte verbinden,
metallische Kabelverschraubungen für Servomotor verwenden,
getrennte Verlegung von Energie- und Signalleitungen.
Bei der Installation sind die Herstellerangaben zur Filterung, zur Schirmung, zur Erdung und zum
Personenschutz (Fehlerstromschutzeinrichtungen) zu beachten.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
57
Aufbau des Servo-Umrichters 9300
•
Die Einzelachse ist in schmaler Bauform mit separierbarem Kühlkörper realisiert.
•
Netz- und DC-Leistungsanschlüsse sind oben, Motoranschlüsse unten angeordnet.
•
Rückführsysteme werden direkt am Resolvereingang (Resolver) oder am Encodereingang
(TTL-Encoder oder Sin-/Cos-Geber) angeschlossen.
•
Netzausfallüberwachung, Motorphasenüberwachung für Servo-Asynchronmotoren, feldorientierte Regelung und sensorlose Drehzahlregelung erhöhen die Zuverlässigkeit des
Servo-Systems.
•
Für das digitale Gleichlaufsystem sind Leitfrequenz Ein- und Ausgang integriert.
•
Die 6 digitalen Eingänge, die 4 digitalen Ausgänge, die 2 analogen Differenzeingänge und
die 2 analogen Ausgänge sind an aufsteckbare Steuerklemmen angeschlossen.
•
An den Systembus kann eine Klemmenerweiterung mit 8 Klemmen angeschlossen werden,
die frei programmierbar als Ein- oder Ausgang zusätzlich genutzt werden können.
•
Die Parametrierung des Servo-Umrichters kann über einen aufsteckbaren Bedienmodul
erfolgen. Alternativ kann über eine aufsteckbare serielle Schnittstelle die Bediensoftware
Global Drive Control eingesetzt werden.
Steueranschlüsse
Das Automatisierungs-Interface (X1) dient dem Anschluss verschiedener Aufsteckmodule:
Bedienmodul,
Feldbusmodul RS232, RS485 (LECOM-A/B/LI),
INTERBUS, Typ 2111,
PROFIBUS-DP, Typ 2131,
Ethernet.
Über den Systembusanschluss (X4) können über die Klemmen HI, LO und GND mehrere
Antriebsregler untereinander, eine übergeordnete Steuerung oder eine dezentrale Klemmenerweiterung angeschlossen werden. Das CAN-basierende Busprotokoll nach CANopen
ermöglicht bei bis zu 63 Busteilnehmern Datenübertragungsraten von max. 1 MBit/s. Der Zugriff
auf alle Parameter ist über den Systembus möglich.
Die digitalen Signale werden über den 2 x 7poligen Klemmenblock (X5) kontaktiert. Die Pegel
der 6 digitalen Eingänge und der 4 digitalen Ausgänge sind SPS-kompatibel. Für die Ein- und
Ausgänge wird die interne oder eine externe Spannungsversorgung eingesetzt.
Die analogen Signale werden über den 2 x 4poligen Klemmenblock (X6) kontaktiert. Die beiden
Eingänge haben abhängig von der Jumperstellung (X3) den Pegel -10 V bis +10 V oder -20 mA
bis +20 mA. Der Pegel der beiden analogen Ausgänge beträgt -10 V bis +10 V bei einem max.
Strom von 2 mA.
Über den Kaltleiter (PTC) oder einen Thermokontakt kann die Motortemperatur überwacht
werden. In vorkonfektionierten Systemleitungen für Servomotoren des Herstellers ist die Leitung
zur Temperaturrückführung bereits enthalten. Diese Leitungen sind für eine EMV-gerechte
Verdrahtung ausgelegt. Sonst erfolgt der Anschluss über den Resolveranschluss (X7) oder den
Encoderanschluss (X8).
Am Resolveranschluss (X7) wird als Rückführsystem ein 2poliger Resolver (U =10 V, f = 4 kHz)
angeschlossen. Der Resolver und die Resolverzuleitung werden auf Drahtbruch überwacht.
An den Encoderanschluss (X8) wird ein Inkrementalgeber mit zwei um 90° elektrisch versetzten
5-V-Komplementärsignalen (TTL-Geber) angeschlossen. Die Nullspur kann optional angeschlossen werden. Die Eingangsfrequenz beträgt 0 - 500 kHz bei einer Stromaufnahme von 6 mA
je Kanal.
An den Encoderanschluss (X8) kann auch ein einfacher Sinus-Cosinus-Geber mit Nennspannung
5 - 8 V oder ein Sinus-Cosinus-Geber mit Kommunikationsschnittstelle (längere Initialisierungszeit) angeschlossen werden.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
58
Resolver
l < 50 m
+REF
1
-REF
2
3
+COS
4
-COS
5
+SIN
6
-SIN
7
+PTC
8
-PTC
PTC
Resolveranschluss (X7)
9
9-pol. Sub-D-Buchse
l < 50 m
Encoder
RefSIN
B
SIN
B
RefCOS
A
COS
A
Vcc
Vcc
GND
GND
Z / -485
Z
Z / +485
Z
+PTC
+PTC
-PTC
-PTC
1
2
3
4
5
Encoderanschluss (X8)
für Inkremental- oder
Sinus-Cosinus-Geber
6
7
8
9
9-pol. Sub-D-Buchse
Für Folgeantriebe werden der Leitfrequenzeingang (X9) vom Folgeantrieb (Slave) und der
Leitfrequenzausgang (X10) vom Leitantrieb (Master) verbunden.
PTC
Master (X10)
l < 50 m
Slave (X9)
B
1
1
B
A
2
2
A
A
3
3
A
4
4
GND
5
5
GND
Z
6
6
Z
7
7
Z
Z
enable
8
8
Lamp
control
B
9
9
B
9-pol. Sub-D-Buchse
G. Schenke, 1.2013
Leitfrequenzeinund -ausgang
(X9, X10)
9-pol. Sub-D-Buchse
Mechatronik
FB Technik, Abt. E+I
59
Bei Parallelschaltung sind max. 3 Folgeantriebe anschließbar. Bei Reihenschaltung sind beliebig
viele Folgeantriebe anschließbar.
Die Übertragung mit bis zu 500 kHz erfolgt
Rechtslauf
zweispurig mit inversen 5-V-Signalen und
A
der Nullspur. Über Pin 8 kann der Slave den
A
Master überwachen.
B
B
5-V-Signale der LeitfrequenzZ
übertragung bei Rechtslauf
Z
Konfiguration
In der Praxis benötigt jede Anwendung bestimmte, anwendungsspezifische Konfigurationen
(Programme). Im Allgemeinen steht hierfür eine Vielzahl von verschiedenen Funktionsblöcken
zur Verfügung, die in geeigneter Form miteinander verknüpft werden.
Für häufig vorkommende Anwendungen sind die Verknüpfungen in Funktionsblöcken in den
Grundkonfigurationen bereits gespeichert. Sie lassen sich über die Codestelle C0005 auswählen
und aktivieren.
Grundfunktionen der Konfiguration sind:
Drehzahlregelung,
Momentenregelung mit Drehzahlklammerung,
Master bei Leitfrequenzkopplung,
Slave an Leitfrequenzschiene,
Slave an Leitfrequenzkaskade.
Wird eine andere Funktion als eine Grundfunktion gewünscht, so muss der abweichende
Signalfluss konfiguriert werden. Hierzu werden Funktionsblöcke eingebunden oder entfernt, die
Funktionsblöcke neu parametriert und Klemmen umkonfiguriert.
Mit der Wahl der Bedienungsart wird festgelegt, über welche Schnittstelle der Antriebsregler
parametriert oder gesteuert werden soll.
Die Parametrierung erfolgt über das Bedienmodul oder das Feldbusmodul, das an X1 aufgesteckt
ist oder über den Systembus (X4).
Die Steuerung des Antriebsreglers kann über die Klemmen (X5 und X6), das Feldbusmodul an
X1 oder über den Systembus (X4) erfolgen.
Funktionsblöcke, die den Antriebsregler an die verschiedenen Anwendungsfälle anpassen,
besitzen eine bestimmte Anzahl von Ein- und Ausgängen, die sich miteinander verbinden lassen.
Entsprechend ihrer jeweiligen Funktion treten nur bestimmte Signalarten an den Ein- und
Ausgängen auf.
Quasi analoge Signale
Symbol:
Einheit: %
Kennzeichnung: a
Auflösung: 16 Bit
Wertebereich:
±16384 = ±100 %
Digitale Signale
Symbol:
Einheit: binär (HIGH oder LOW)
Kennzeichnung: d
Auflösung: 1 Bit
Drehzahlsignale
Symbol:
Einheit: rpm
Kennzeichnung: phd Auflösung: 16 Bit
Winkelsignale
Symbol:
Einheit: inc
Kennzeichnung: ph Auflösung: 32 Bit
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
60
Es können nur gleiche Signalarten miteinander verbunden werden. Jedem Eingang wird eine
Signalquelle zugewiesen. Ein Eingang kann nur eine Signalquelle haben. Eingänge verschiedener
Funktionsblöcke können dieselbe Signalquelle haben.
Ein Funktionsblock (FB) besteht aus Eingängen, der Funktion und Ausgängen. Über den Namen
des Funktionsblocks ist der FB eindeutig zu identifizieren.
Eingangssymbol
Name des
Eingangs
C1021/1
ParametrierCodestelle
Name des FB
ARITPH2-MODUS
C1020
ARITPH2
ARITPH2-IN1
x
C1022/1
C1021/2
y
±230 - 1
+
_
*
ARITPH2-OUT
/
ARITPH2-IN2
C1022/2
KonfigurationsCodestelle(n)
AnzeigeCodestelle(n)
Funktion
Name des
Ausgangs
Ausgangssymbol
Aufbau eines Funktionsblocks (FB) am Beispiel des Arithmetikblocks ARITPH2
Der FB ARITPH2 errechnet aus zwei Winkeleingangssignalen ein Winkelausgangssignal. Zur
Verfügung stehen 6 Arithmetikblöcke (ARITPH1 ... ARITPH6).
Mehr als 60 Funktionsblöcke stehen für unterschiedliche Konfigurierungen zur Verfügung (z.B.
FB für Logik, Arithmetik, Umrechnung, Leitfrequenz, Motorregelung, -steuerung und –überwachung, Feld- und Systembus).
Bis auf wenige Funktionsblöcke wie DIGIN (digitale Eingänge), DIGOUT (digitale Ausgänge)
MCTRL (Servo-Regelung) müssen alle verwendeten Funktionsblöcke in eine Abarbeitungstabelle eingegeben werden.
Eingangssymbol
Name des
Eingangs
Funktion
Name des FB
AOUT1
C0431
+
AOUT1-IN
X6
62
+
C0434/1
C0433
AOUT1-GAIN
Klemme
X6/62
C0434/3
C0432
Aufbau des
Funktionsblocks
AOUT1
AOUT1-OFFSET
C0434/3
KonfigurationsCodestelle(n)
G. Schenke, 1.2013
AnzeigeCodestelle(n)
Mechatronik
FB Technik, Abt. E+I
61
Die beiden Analogausgänge AOUT1 und AOUT2 können als Monitorausgänge für interne
Analogsignale verwendet werden (-10 V ... +10 V).
Über die Konfigurations-Codestellen C0431, C0432 und C0433 werden die Eingangssignale auf
die Eingangsverknüpfungen, auf Festwerte, direkt auf Ausgangswerte anderer Funktionsblöcke
oder auf einstellbare Werte (über andere Codestellen) gelegt (insgesamt rd. 50 Möglichkeiten).
Die Anzeigen in % erfolgen über C0434/1 (AOUT1-IN), C0434/2 (AOUT1-OFFSET) und
C0434/3 (AOUT1-GAIN).
Funktionsblock MCTRL_MotorControl für die interne Motorreglung
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
62
In allen Konfigurationen wird der Funktionsblock MCTRL (interne Motorreglung) benötigt.
Innerhalb dieses Funktionsblocks befindet sich die Regelung der Antriebsmaschine bestehend
aus: Winkelregler, Drehzahlregler und Motorregelung.
Im FB MCTRL werden folgende Funktionen bearbeitet:
Stromregler (PI-Regler),
Drehmomentenbegrenzung,
Drehmomentenzusatzsollwert,
Drehzahlregler (PID-Regler),
Drehmomentenregelung mit Drehzahlklammerung,
Drehzahlsollwertbegrenzung,
Winkelregler (überlagerter P-Regler mit Begrenzung),
Schnellstop (QSP),
Feldschwächung,
Schaltfrequenzumschaltung.
Eingangssignale: X7 (Resolver), X8 (Encoder), 4 * digital, 9 * analog, 1 * Winkel.
Ausgangssignale: 3 * digital, 7 * analog, 1 * Winkel, 1 * Drehzahl.
In den meisten Konfigurationen wird der Funktionsblock NSET (Drehzahlsollwert-Aufbereitung)
benötigt.
Der Funktionsblock NSET bereitet über Hochlaufgeber oder Festdrehzahlen
den Drehzahlhauptsollwert sowie
einen Zusatzsollwert (oder auch andere Signale)
für die nachfolgende Regelstruktur auf.
G. Schenke, 1.2013
Mechatronik
FB Technik, Abt. E+I
63