Aufgabensammlung
Werbung

Aufgabensammlung
Signale und Systeme 2
für die BA-Studiengänge EIT, II und MT (5. FS)
Dr. Mike Wolf und Dr. Ralf Irmer, Fachgebiet Nachrichtentechnik
Version vom 4. Februar 2015
24
7
Analoge Systeme und Laplace-Transformation
7.14 Betrachtet wird der nachfolgend skizzierte RC-Hochpass.
C
R
(a) Geben Sie die Übertragungsfunktion Gp (p) in Polynomform an.
(b) Geben Sie die Übertragungsfunktion Gp (p) in Pol-Nullstellenform an.
(c) Skizzieren Sie das PN-Bild.
(d) Geben Sie die Übertragungsfunktion G(f ) an.
(e) Skizzieren Sie den Betragsverlauf 20 log10 |G(f )| dB im logarithmischen Maßstab.
(f) Ermitteln Sie die Gruppenlaufzeit (Formel und Skizze).
(g) Ermitteln Sie aus der Übertragungsfunktion Gp (p) in Pol-Nullstellenform die SprungL
antwort h(t) (Formel und Skizze). Es gilt exp(at) ❝ s
1
p−a .
(h) Ermitteln Sie die Impulsantwort (Formel und Skizze).
(i) Ermitteln Sie die Antwort des Filters auf einen relativ breiten Rechteckimpuls.
7.15 Betrachtet wird der nachfolgend skizzierte Tiefpass 2. Ordnung.
(a) Geben Sie die Übertragungsfunktion Gp (p) in Polynomform an.
(b) Überführen Sie die Übertragungsfunktion in die Standardform
Gp (p) =
ω02
,
p2 + p ωQ0 + w02
wobei ω0 = 2πf0 die Resonanz-Kreisfrequenz und Q die Güte ist.
(c) Berechnen Sie die Pole und Nullstellen in Abhängigkeit der Parameter Q und
ω0 . Skizzieren
Sie das PN-Diagramm; unterscheiden Sie dabei die Fälle Q = 1/2,
√
Q = 1/ 2 und Q = 1.
(d) Berechnen Sie den Amplitudengang |G(f )|.
(e) Berechnen Sie den Wert |G(f0 )| in Abhängigkeit des Parameters Q.
(f) Skizzieren Sie den Betragsverlauf 20 log 10 |G(f )| dB für die Fälle Q = 1/2, Q = 2
und Q = 10 im logarithmischen Maßstab.
(g) Berechnen Sie die Gruppenlaufzeit und diskutieren Sie die Werte an den Stellen
f = 0 und f = f0 .
25
7.16 Betrachtet wird wiederum ein Tiefpass 2. Ordnung gemäß
Gp (p) =
p2
ω02
,
+ p ωQ0 + w02
wobei eine Güte Q > 1/2 vorausgesetzt wird. Für die Pole gilt
r
1
ω0
± jω0 1 −
.
p1/2 = −
2Q
4Q2
(a) Gp (p) ist auch als Partialbruch gemäß
Gp (p) =
a1
a2
+
p − p1 p − p2
darstellbar. Berechnen Sie a1 und a2 .
(b) Berechnen Sie die Impulsanwort. Beachten Sie den Hinweis aus Aufgabe 7.14 (g).
7.17 Betrachtet wird ein System 1. Ordnung mit folgender Übertragungsfunktion
Gp (p) =
1
pT
1 − pT
=
−
.
1 + pT
1 + pT
1 + pT
wobei T (T > 0, reell) eine Zeitkonstante ist.
(a) Skizzieren Sie das PN-Diagramm.
(b) Skizzieren Sie den Amplitudengang |G(f )|.
L
(c) Berechnen Sie die Impulsantwort. Hinweis: Es gilt p · Up (p) s ❝
26
d u(t)
dt .
8
Hilbert-Transformation
8.1 Die Hilbert-Transformation H{u(t)} eines Signals u(t) ist wie folgt definiert
Z ∞
1
u(τ )
H{u(t)} = ·
dτ.
π −∞ t − τ
(a) Drücken Sie die Hilbert-Tranformation als Faltungsoperation aus.
(b) Mit welcher Operation korrespondiert die Hilbert-Tranformation von u(t) im Frequenzbereich?
1 ❝
Hinweis: − jπt
s sgn(f)
8.2 Berechnen Sie die Hilbert-Transformierten H{u(t)} der folgenden Zeitfunktionen:
(a) u(t) = U0 ,
(b) u(t) = U0 δ(t),
(c) u(t) = U0 cos(2πf0 t).
8.3 Es sei
y(t) = H{u(t)} .
Wie lautet die Vorschrift für die inverse Hilbert-Transformation H−1 {y(t)}? Welche
Bedingungen muss u(t) erfüllen, damit gilt u(t) = H−1 {y(t)}?
8.4 Gegeben ist der Realteil Re{G(f )} der Übertragungsfunktion G(f ) eines kausalen LTISystems mit der Impulsantwort g(t).
Re{G(f )}
1
−fg
fg
f
Bestimmen Sie
(a) die Impulsantwort g(t) und
(b) den Imaginärteil Im{G(f )} der Übertragungsfunktion (Formel und Skizze).
27
8.5 Für Minimalphasensysteme mit der Übertragungsfunktion G(f ) = |G(f )|ej ϕ(f ) besteht
zwischen dem Dämpfungsverlauf
adB (f ) = −20 log10 |G(f )| dB
und dem Phasenverlauf ϕ(f ) der folgende Zusammenhang
ϕ(f ) =
ln 10
· H {adB (f )} .
20
Bestimmen Sie zum nachfolgend skizzierten Dämpfungsverlauf eines Minimalphasensystems den Phasenverlauf ϕ(f ).
adB (f )
aS : Sperrdämpfung
aS
fg
−fg
f
8.6 Mit Hilfe eines Hilbert-Transformators lässt sich ein Einseitenband Bandpass-Signal
erzeugen. Zeigen Sie anhand eines (reellen) Tiefpass-Signals u1 (t) mit dem Spektrum
U1 (f ) und der Bandbreite B, dass eine Quadratur-Upconversion der Signale u1 (t) und
H{u1 (t)} gemäß
um (t) = u1 (t) · cos(2πfc t) − H{u1 (t)} sin(2πfc t)
ein Einseitenband-Signal erzeugt. Für die Trägerfrequenz fc soll gelten fc ≫ B.
8.7 Wie lautet die Impulsantwort eines bandbegrenzten Hilbert-Transformators mit der
Übertragungsfunktion
f − fg /2
f + fg /2
− rect
?
G(f ) = j · rect
fg
fg
28
9
Bandpass-Tiefpass-Transformation
9.1 Geben Sie für die beiden folgenden Bandpass-Signale die entsprechenden komplexen
Einhüllenden uT1 (t) bzw. uT2 (t) an. Die Bandpass-Tiefpass-Transformation soll bzgl.
der Frequenz fc durchgeführt werden.
(a) u1 (t) = U0 cos(2πfc t)
(b) u2 (t) = U0 sin(2πfc t)
9.2 Die folgende Abbildung zeigt das Spektrum X(f ) eines (reellen) Bandpass-Signals.
(a) Skizzieren Sie das Spektrum XT (f ) des zugehörigen Tiefpass-Signals, wenn die
Bandpass-Tiefpass-Transformation bzgl. der Frequenz fc durchgeführt wird.
(b) Ermitteln Sie das zugehörige komplexe Tiefpass-Signal xT (t).
(c) Wie lauten die Inphase- und die Quadraturkomponente von x(t)?
X(f )
X0
−fc
fc
f
−X0
2B
9.3 Die folgende Abbildung zeigt das Spektrum X(f ) eines (reellen) Bandpass-Signals.
(a) Skizzieren Sie das Spektrum XT (f ) des zugehörigen Tiefpass-Signals, wenn die
Bandpass-Tiefpass-Transformation bzgl. der Frequenz fc durchgeführt wird.
(b) Ermitteln Sie das zugehörige komplexe Tiefpass-Signal xT (t).
X(f )
X0
−fc
fc
B
29
f
9.4 Gegeben sei das folgende komplexe Tiefpass-Signal
xT (t) = j X0 si(πBt)
(a) Berechnen Sie das zugehörige Bandpass-Signal x(t), wenn bzgl. der Transformation vom komplexen Tiefpass-Bereich in den Bandpass-Bereich die Mittenfrequenz
fc = 5 B vorausgesetzt wird.
(b) Ermitteln Sie die spektrale Amplitudendichte X(f ) des Bandpass-Signals x(t).
9.5 Betrachtet wird ein Amplitudenmoduliertes Signal u1 (t) ohne Träger gemäß
u1 (t) = U0 cos(2πfs t) sin(2πfc t)
mit fc ≫ fs ,
das über einen Bandpass mit der Übertragungsfunktion
f − fc − B/2
f + fc + B/2
G(f ) = rect
+ rect
B
B
mit
B = 2fs
übertragen wird.
(a) Ermitteln Sie das Zeitsignal u2 (t) und dessen Spektrum U2 (f ) am Ausgang des
Bandpasses (Formel).
(b) Führen Sie bzgl. der Frequenz fc eine Bandpass-Tiefpass-Transformation des Eingangssignals durch. Skizzieren Sie uT1 (t) und das zugehörige Spektrum UT1 (f ).
(c) Skizzieren Sie Impulsantwort gT (t) und Übertragungsfunktion GT (f ) des Bandpasses im äquivalenten Tiefpass-Bereich.
Beachten Sie, dass die Transformation wieder bzgl. der Frequenz fc vorgenommen
werden muss.
(d) Ermitteln Sie das Ausgangssignal uT2 (t) und dessen Spektrum UT2 (f ) im äquivalenten Tiefpass-Bereich (Formel und Skizze).
30
10
Filter mit zeitdiskreter Impulsantwort
10.1 Die folgende Skizze zeigt ein (lineares zeitinvariantes) Übertragungssystem mit zeitdiskreter Impulsantwort. Es enthält neben den Konstantenmultiplikatoren und dem
Additionsglied ein ideales Verzögerungsglied mit der Impulsantwort ge (t) = δ(t − t0 ).
u1 (t)
−1
1
t0
u2 (t)
(a) Wie lautet die Z-Transformierte Gze (z) des Elementarsystems mit der Impulsantwort ge (t) = δ(t − t0 )?
(b) Ermitteln Sie die Impulsantwort g(t) des Übertragungssystems durch Ablesen“
”
aus der Schaltung und skizzieren Sie diese.
(c) Skizzieren Sie die zugehörige Sprungantwort h(t).
(d) Ermitteln Sie die Z-Transformierte Gz (z) des Übertragungssystems sowohl durch
Ablesen aus der Schaltung (vgl. Anhang A, Seite 38) als auch durch Z-Transformation
der Impulsantwort g(t) zugeordneten Zahlenfolge c(n).
(e) Skizzieren Sie das PN-Bild (PN: Pol-Nullstellen).
(f) Ermitteln Sie die Übertragungsfunktion G(f ) des Gesamtsystems durch FourierTransformation von g(t) sowie alternativ aus der Z-Transformierten Gz (z).
(g) Skizzieren Sie den Betragsverlauf |G(f )|.
10.2 Die folgende Skizze zeigt ein FIR-Filter.
u1 (t)
t0
t0
1
1
u2 (t)
−2
(a) Interpretieren Sie den Begriff FIR-Filter“.
”
(b) Ermitteln Sie die Impulsantwort g(t) des Übertragungssystems durch Ablesen“
”
aus der Schaltung und skizzieren Sie diese.
(c) Skizzieren Sie die zugehörige Sprungantwort h(t).
(d) Ermitteln Sie die Z-Transformierte Gz (z) des Übertragungssystems sowohl durch
Ablesen aus der Schaltung auch durch Z-Transformation der der Impulsantwort
g(t) zugeordneten Zahlenfolge c(n).
31
(e) Skizzieren Sie das PN-Bild (PN: Pol-Nullstellen).
(f) Ermitteln Sie die Übertragungsfunktion G(f ) des Gesamtsystems durch FourierTransformation von g(t) sowie alternativ aus der Z-Transformierten Gz (z).
(g) Skizzieren Sie den Betragsverlauf |G(f )|.
10.3 Weisen Sie nach, dass eine reelle Nullstelle z1 = ± 1 mit einem frequenzproportionalen
Phasenwinkel korrespondiert.
10.4 Weisen Sie nach, dass der Betragsverlauf |G(f )| der Übertragungsfunktion
Gz (z) = kz
z−
1
z1∗
z − z1
,
0 < |z1 | < 1
konstant ist (Allpass).
10.5 Das angegebene System wird mit einem periodischen Rechtecksignal u1 (t) gemäß Skizze
beaufschlagt.
Ermitteln Sie das Ausgangssignal u2 (t).
u1 (t)
t0
u2 (t)
u1 (t)
t0
2
4V
t
t0
10.6 Bzgl. der Übertragungsfunktion
Gz (z) =
kz (z + 0.1)
z
sind gesucht
(a) das Blockschaltbild,
(b) die Impulsantwort g(t),
(c) die Konstante kz unter der Randbedingung, dass gilt G(0) = 1.
32
10.7 Für die skizzierte PN-Konfiguration
jIm{z}
kz = 1,
a
0<a<1
1
Re{z}
a
sind gesucht
(a) die Übertragungsfunktion Gz (z),
(b) das Verzweigungsnetzwerk ( Modellrealisierung“),
”
(c) die Impulsantwort g(t) für a2 = 1/2,
(d) der Betrags- und der Phasenverlauf |G(f )| bzw. ϕ(f ).
10.8 Gegeben ist folgendes Verzweigungsnetzwerk
u1 (t)
u2 (t)
−0,5
t0
(a) Handelt es sich um ein IIR- oder ein FIR-Filter?
(b) Ermitteln Sie die Übertragungsfunktion Gz (z).
(c) Skizzieren Sie das PN-Bild.
(d) Ist das System stabil? Begründen Sie Ihre Aussage.
(e) Stellen Sie durch Rücktransformation von Gz (z) die Rekursionsgleichung auf (Differenzengleichung), die das System im Zeitbereich beschreibt.
(f) Skizzieren Sie die Impulsantwort g(t), die sich durch Ablesen aus dem Verzweigungsnetzwerk ergibt. Vergleichen Sie die Stoßgewichte der zeitdiskreten Impulsantwort mit den Zahlenwerten, die sich durch Einsetzen des Anfangswerts 1“ aus
”
der Rekursionsgleichung ergeben.
(g) Skizzieren Sie die Sprungantwort h(t).
(h) Skizzieren Sie den Betrags- und den Phasenverlauf |G(f )| bzw. ϕ(f ).
33
10.9 Gegeben ist folgendes Verzweigungsnetzwerk
u1 (t)
1
−b
0 < b < 1,
t0
reell
u2 (t)
b
(a)
(b)
(c)
(d)
Ermitteln Sie die Übertragungsfunktion Gz (z).
Skizzieren Sie das PN-Bild.
Ist das System stabil? Begründen Sie Ihre Aussage.
Stellen Sie durch Rücktransformation von Gz (z) die Rekursionsgleichung auf (Differenzengleichung), die das System im Zeitbereich beschreibt.
(e) Skizzieren Sie die Gewichtsfunktion g(t), die sich durch Ablesen aus dem Verzweigungsnetzwerk ergibt. Vergleichen Sie die Stoßgewichte der zeitdiskreten Impulsantwort mit den Zahlenwerten, die sich durch Einsetzen des Anfangswerts 1“ aus
”
der Rekursionsgleichung ergeben.
(f) Skizzieren Sie die Sprungantwort h(t).
(g) Skizzieren Sie den Betrags- und den Phasenverlauf |G(f )| bzw. ϕ(f ).
10.10 Gegeben ist ein Filter mit der folgenden Impulsantwort
g(t) = δ(t) + 3 δ(t − t0 ) − δ(t − 3 t0 ).
(a) Skizzieren Sie das dazugehörige Verzweigungsnetzwerk.
(b) Geben Sie die Formeln für die Übertragungsfunktionen G(f ) sowie Gz (z) dieses
Filters an.
Das Eingangssignal u1 (t) sei gegeben durch
u1 (t) =
2
X
n=0
c1 [n]δ(t − n · t0 ),
mit
c1 [0] = 2
c1 [1] = 1 .
c1 [2] = 3
(c) Berechnen Sie das Ausgangssignal u2 (t) mit Hilfe der Matrix-Vektor-Schreibweise
auf zwei verschiedene Arten.
(d) Stellen Sie die in (c) berechnete Beziehung zwischen u1 (t) und u2 (t) in MatrixVektor-Schreibweise so dar, dass die Systemmatrix C circ zyklisch wird.
(e) Geben Sie die Eigenvektoren der in (d) berechneten zyklischen Systemmatrix C circ
an. Wie lassen sich die Eigenwerte von C circ berechnen (die Eigenwerte müssen
nicht explizit berechnet werden, die Vorschrift genügt)?
34
Anhang
A
Analoge Filter und Laplace-Transformation
A.1
Laplace-Transformation
Beim Entwurf und der Analyse von Filtern spielt die Laplace-Transformation eine wesentliche Rolle. Die Laplace-Transformation kann als eine Erweiterung der Fourier-Transformation
aufgefasst werden.
Hinreichend für die Konvergenz des Fourierintegrals im klassischen Sinn“, d.h. ohne
”
die Zuhilfenahme von Distributionen, ist die absolute Integrierbarkeit der Zeitfunktion. Beispielsweise sind periodische Zeitsignale nicht ohne weiteres“ Fourier-transformierbar, da das
”
Fourier-Integral bei der Grundfrequenz f0 (und gegebenenfalls auch bei ganzzahligen Vielfachen von f0 ) betragsmäßig unendlich ist. Aber auch wenn die Stoßfunktion zugelassen wird,
konvergiert das Fourier-Integral für exponentiell anwachsende Signale nicht.
Die Laplace-Transformation erweitert nun die Klasse der transformierbaren Signale durch
eine zusätzliche exponentielle Wichtung mit exp(−σt), σ ≥ 0, reell. Werden kausale Zeitfunktionen vorausgesetzt (jedes realisierbare System hat eine kausale Impulsantwort), dann gilt
für die Fourier-Transformierte der Funktion g(t) unter Berücksichtigung der Wichtung
Z ∞
−σt
s
❝
g(t) · e−σt · e−j2πf t d t.
e
· g(t)
0
Mit der Substitution p = σ + j2πf ergibt sich die Definition der Laplace-Transformierten
Gp (p) einer Zeitfunktion g(t):
Z ∞
L s
❝
g(t) · e−pt d t.
g(t)
Gp (p) =
0
Die Laplace-Transformation ist prinzipiell auf kausale Zeitfunktionen zugeschnitten. Die Bildvariable p = σ + j2πf ist komplex bzw. zweidimensional. Durch die Wichtung e−σt sind
nun auch exponentiell anwachsende Zeitfunktionen transformierbar, die unter anderem im
Zusammenhang mit instabilen Systemen auftreten können. Wird ein Filter beispielsweise
aktiv realisiert und enthält Rückkopplungen, dann kann sich die Impulsantwort bei ungünstiger Dimensionierung exponentiell aufschauckeln“. Ein solches System ist mit der Fourier”
Transformation nicht mehr behandelbar.
Ist g(t) jedoch zugleich im klassischen Sinn, d.h. ohne die Zuhilfenahme von Distributionen, Fourier-transformierbar, dann folgt mit σ = 0 bzw. p = j2πf für die Übertragungsfunktion
G(f ) = Gp (p)|p=j2πf = Gp (j2πf ).
Nach der oben formulierten hinreichenden Bedingung für die Existenz des Fourier-Integrals
muss dies für alle BIBO-stabilen (kausalen) Systeme mit
Z ∞
|g(t)|dt < ∞
0
gelten.
35
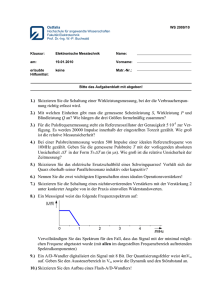
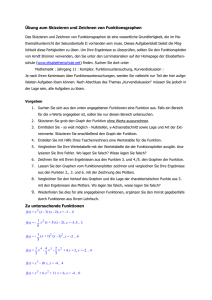
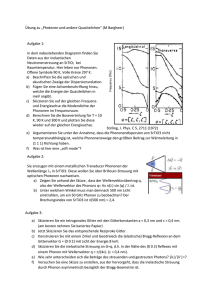
uL (t)
iL (t)
R
u1 (t)
C
iC (t)
u2 (t)
L
u1 (t)
R
u2 (t)
Abbildung 1: Tiefpass-Filter 1. Ordnung mit den Blindelementen C oder L.
A.2
A.2.1
Beschreibung analoger Filter
Beispiel: Tiefpass 1. Ordnung
Zunächst soll der RC-Tiefpass im linken Teil von Abb. 1 betrachtet werden. Der physikalische
Zusammenhang zwischen dem Strom iC (t) durch die Kapazität und der Spannung u2 (t) über
der Kapazität lautet
Z t
d u2 (t)
1
iC (t) = C ·
iC (τ )d τ.
bzw. uC (t) = ·
dt
C 0
Unter Anwendung des Differentationssatzes bzw. des Integrationssatzes der Laplace-Transformation folgt daraus für die Beschreibung im Bildbereich unmittelbar
IC (p) = p C · U2 (p) bzw. UC (p) =
1 1
· · IC (p).
p C
(1)
Differentiation und Integration im Zeitbereich korrespondieren also mit einfachen algebraischen Operationen im Bildbereich. Demnach ist die Übertragungsfunktion Gp (p) des RCTiefpasses gegeben durch
Gp (p) =
U2 (p)
1
=
U1 (p)
1 + pT
mit T = RC.
(2)
Für den physikalischen Zusammenhang zwischen dem Strom iL (t) und der Spannung uL (t)
über der Induktivität im rechten Teil von Abb. 1 gilt analog
Z t
d iL (t)
1
uL (t) = L ·
uL (τ )d τ.
bzw. iL (t) = ·
dt
L 0
Die Korrespondenz im p-Bereich ist
UL (p) = p L · IL (p) bzw. IL (p) =
1 1
· · UL (p).
p L
Damit gilt für die Übertragungsfunktion Gp (p) wieder
Gp (p) =
1
1 + pT
36
mit T =
R
.
L
(3)
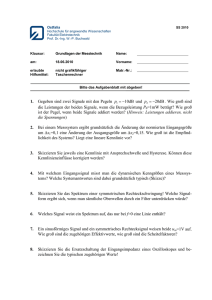
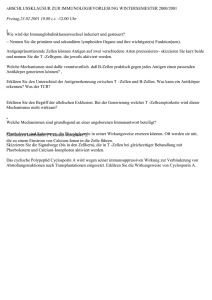
u1 (t)
α0
ge (t)
−β0
αM
α1
ge (t)
−β1
ge (t)
−βM
u2 (t)
ge (t)
−βN−1
1−βN
Abbildung 2: Analoges Verzweigungsnetzwerk N -ter Ordnung. Das enthaltene Elementarsystem mit der Impulsantwort ge (t) ist ein idealer Integrator mit Gpe (p) = 1/p. Zu beachten
sind die negativen Vorzeichen an den Konstantenmultiplikatoren im Rückwärtszweig.
A.2.2
Verzweigungsnetzwerk als systemtheoretisches Modell
Ein Filter bzw. Analog-Netzwerk N -ter Ordnung enthält genau N -Blindelemente (Kapazitäten/Induktivitäten). Für jedes Blindelement ist der Zusammenhang zwischen Strom und
Spannung im Bildbereich durch Gl. (1) bzw. Gl. (3) vorgegeben. Dabei spielt immer der
Term 1/p (idealer Integrierer) bzw. p (idealer Differenzierer) eine Rolle. Tatsächlich kann
jedes RLC-Netzwerk N -ter Ordnung systemtheoretisch durch das in Abb. 2 dargestellte Verzweigungsnetzwerk modelliert werden, das als Elementarsystem mit der Impulsantwort ge (t)
genau N ideale Integratoren mit
1
(4)
Gpe (p) =
p
enthält. Da sich die Integration im Zeitbereich im Bildbereich der Laplace-Transformation
durch den einfachen rationalen Ausdruck gemäß Gl. (4) darstellen lässt, kann die Übertragungsfunktion Gp (p) des Netzwerks als die folgende gebrochen rationale Funktion N -ten
Grades dargestellt werden:
PM
µ
α0 + α1 p + · · · + αM pM
µ=0 αµ p
.
(5)
Gp (p) = PN
=
ν
β0 + β1 p + · · · + βN pN
ν=0 βν p
Der Grad N des Nennerpolynoms wird durch die Anzahl der Elementarsysteme vorgegeben
— in der Praxis also durch
der in der Schaltung enthaltenen Blindelemente.
P die Anzahl
µ vom Grad M enthält M Nullstellen (wobei hier mehrDas Zählerpolynom M
α
p
µ=0 µ
fache Nullstellen auch mehrfach gezählt werden sollen). Diese Nullstellen sind zugleich auch
Nullstellen der Übertragungsfunktion Gp (p) und damit Nullstellen schlechthin. Das NennerP
µ
polynom N
µ=0 βµ p enthält entsprechend des Grades N Nullstellen, die bezogen auf Gp (p)
als Polstellen“ bezeichnet werden. Komplexe Null- bzw. Polstellen müssen bei reellen Im”
pulsantworten g(t) immer als konjugiert komplexe Paare auftreten, denn anderenfalls wäre
Gp (j2πf ) keine bzgl. konjugiert gerade Funktion mehr. Mit den Nullstellen p0µ und Polstellen
pν kann die gebrochen rationale Funktion nach Gl. (5) auch in die folgende Linearfaktorform
überführt werden
Gp (p) = kp
(p − p01 ) (p − p02 ) . . . (p − p0M )
(p − p1 ) (p − p01 ) . . . (p − pN )
37
mit kp =
αM
.
βN
(6)
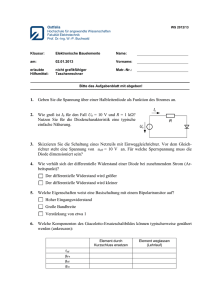
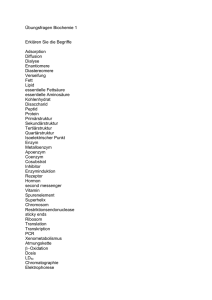
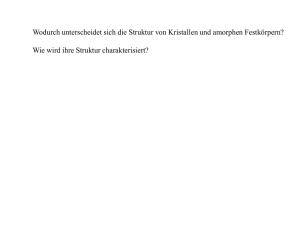
j Im{p}
−1/T
Re{p}
Abbildung 3: PN-Bild eines RC-Tiefpasses.
Eine einzelne Nullstelle ergibt ein nicht realisierbares System. Deshalb muss in der Praxis
immer gelten N ≥ M . Es sei darauf hingewiesen, dass die Linearfaktorform nach Gl. (6)
gerade in der Praxis bedeutsam ist, da praktische Systeme (inbesondere aktive Analogfilter)
höherer Ordnung häufig als Kaskade (Kettenschaltung) von Einzelsystemen 1. und 2. Ordnung
realisiert werden.
Eine Darstellung der Null- und Polstellen in der komplexen p-Ebene ist (zumindest mit
etwas Erfahrung) sehr aussagekräftig. Man spricht vom sogenannten PN-Bild“. Für den
”
beispielhaft betrachteten Tiefpass mit der Übertragungsfunktion nach Gl. (2) gilt
1
1
1
= ·
1 + pT
T p+
Gp (p) =
1
T
.
Er hat die Polstelle p1 = −1/T . Abb. 3 zeigt das zugehörige PN-Bild. Der Pol liegt in der
linken Halbebene.
Tatsächlich müssen immer alle Pole in der linken Halbebene liegen, damit ein System stabil
ist. Nur in diesem Fall darf für die Analyse der Übertragungsfunktion G(f ) die Bildvariable p
in Gp (p) zu p = j2πf gesetzt werden. Beispielsweise gilt ein idealer Integrator als Einzelsystem
als nicht stabil, da die Polstelle der Übertragungsfunktion im Ursprung und damit auf der
imaginären Achse liegt.
B
B.1
Filter mit zeitdiskreter Impulsantwort
Verzweigungsnetzwerk
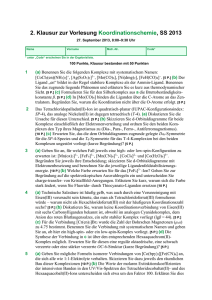
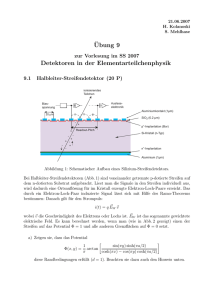
u1 (t)
Vorwärts (Feedforward)-Zweig
α0
t0
−β0
αM
α1
t0
−β1
t0
−βN−1
−βM
Rückkoppel (Feedback)-Zweig
38
u2 (t)
t0
1−βN
• Mit der z-Transformierten Gz (z) = z −1 des Elementarsystems folgt für die Übertragungsfunktion des Gesamtsystems (Realisierbarkeit bedingt N ≥ M )
PM
µ
µ=0 αµ z
ν
ν=0 βν z
Gz (z) = PN
= kz ·
(z − z01 )(z − z02 ) . . . (z − z0M )
(z − z1 )(z − z2 ) . . . (z − zN )
mit kz =
αM
βN
(7)
• für reellwertige Impulsantworten werden auch reellwertige Koeffizienten αµ und βν gefordert; deshalb müssen komplexe Pole oder komplexe Nullstellen immer in konjugiert
komplexen Paaren auftreten
• IIR-Filter werden üblicherweise als Kaskade von Filtern 1. und 2. Ordnung realisiert.
(Bei einem Digitalfilter muss beispielsweise der Einfluss der Koeffizientenquantisierung
berücksichtigt werden. Hier zeigt die Kaskadierung deutliche Vorteile gegenüber einer
Direktform.)
B.2
Beitrag einer Nullstelle zur Frequenzcharakteristik
j Im{z}
gedachtes
j
ej2πfx t0
Koordinatensystem
|
f x)
(
G
|
ϕ(fx )
2πfx t0
1
39
Re{z}
B.3
Beitrag einer Polstelle zur Frequenzcharakteristik
j Im{z}
gedachtes
j
ej2πfx t0
Koordinatensystem
−
)|
1
(f x
|G
-ϕ(fx )
2πfx t0
1
B.4
Re{z}
Zulässige PN-Lagen für kausale, stabile Systeme
• für den Grad N des Nennerpolynoms muss gelten: N ≥ M
• alle Pole müssen im Inneren des Einheitskreises liegen
B.5
Allpass-Konfigurationen
• ist jeder Pol mit einer konjugiert reziproken Nullstelle gepaart, gilt also z0ν = 1/zν∗ ∀ν,
dann ergibt sich ein konstanter Betragsverlauf |G(f )|, wobei G(f ) = Gz (z)|z=ej2πf t0
1
• die Gruppenlaufzeit Tgr (f ) = − 2π
·
positiv
d ϕ(f )
df
ist im Bereich 0 ≤ f < 1/(2t0 ) grundsätzlich
• dementsprechend ist der Phasengang ϕ(f ) eines Allpasses im Bereich 0 ≤ f < 1/(2t0 )
monoton und niemals positiv
B.6
Minimalphasen-Konfigurationen
• Liegen alle Nullstellen z0µ , µ = 0, . . . , M , im Inneren des Einheitskreises oder auf dem
Einheitskreis, und entspricht die Anzahl der Nullstellen der Anzahl der Pole, dann
spricht man von einem Minimalphasen-System.
• solche Minimalphasen-Systeme haben die folgenden wichtigen Eigenschaften:
– im Vergleich zu anderen Konfigurationen mit identischem Betragsgang besitzt die
Minimalphasen-Konfigurationen die geringste Gruppenlaufzeit1
1
Jedes Nicht-Minimalphasen-System, dass sich durch eine rationale Funktion entsprechend Gleichung (7)
40
– im Vergleich zu anderen Konfigurationen mit identischem Betragsgang besitzt die
Minimalphasen-Konfigurationen die geringste Phasenlaufzeit bzw. Phasenverzögerung2
– Die Phase eines Minimalphasen-Systems ist vollständig durch den Amplitudengang
bestimmt. Zwischen dem Dämpfungsverlauf
adB (f ) = −20 log10 |G(f )| dB
und dem Phasenverlauf ϕ(f ) besteht der folgende Zusammenhang
ϕ(f ) =
ln 10
· H {adB (f )} .
20
Dieser Zusammenhang folgt aus der Tatsache, dass das sogenannte Cepstrum“
”
ln (G(f )) = ln (|G(f )|) + jϕ(f ) = −
adB (f )
+ jϕ(f )
20 log10 (e)
bei Minimalphasensystems mit einer kausalen Zeitfunktion korrespondiert. Bei kausalen Zeitfunktionen
ergibt sich der Imaginärteil des Spektrums durch die Hilbert-Transformation des Realteils – verbunden
mit einer Vorzeichennumkehr.
– liegen alle M = N Nullstellen im Inneren des Einheitskreises, so ist die inverse
Systemfunktion 1/Gz (z) kausal und stabil; ein solches Minimalphasen-System lässt
sich daher perfekt entzerren
darstellen lässt, kann in ein Allpass-Teilsystem und ein Minimalphasen-Teilsystem zerlegt werden. Da ein
Allpass im Bereich 0 ≤ f < 1/(2t0 ) eine prinzipiell positive Gruppenlaufzeit aufweist, fällt die Gruppenlaufzeit
des Gesamtsystems notwendigerweise größer als die Gruppenlaufzeit des Minimalphasen-Teilsystems aus. Dabei
haben das Gesamtsystem uns das Minimalphasen-Teilsystem einen identischen Betragsgang.
2
Hier gilt entsprechend, dass ein Allpass im Bereich 0 ≤ f < 1/(2t0 ) eine prinzipiell negative Phase ϕ(f ) besitzt. Die Phase eines aus einem Allpass-Teilsystem und einem Minimalphasen-Teilsystem zusammengesetzten
Systems muss daher negativer“ ausfallen als die eines Minimalphasen-(Teil)systems.
”
41
C
Bandpass-Tiefpass-Transformation
C.1
Grafische Veranschaulichung
Re{X(f )}
B
A
−fc
Im{X(f )}
BP-TP
√
Re{XT (f )}
2B
√
fc
f
2A
Im{XT (f )}
0
f
• Betrachtet wird ein beliebiges reelles Bandpass-Signal x(t) mit der Fouriertransformierten X(f ), wobei X(0) = 0 vorausgesetzt wird.
• Das Bandpass-Signal kann in Verbindung mit der Frequenz fc vollständig durch das
äquivalente Tiefpass-Signal xT (t) s ❝ XT (f ) beschrieben werden.
• Da für XT (f ) im allgemeinen gilt XT (f ) 6= XT∗ (−f ), ist xT (t) im allgemeinen komplex.
Ausnahmen bilden sogenannte symmetrische Bandpass-Signale“, die für f > 0 die
”
Bedingung X(fc + f ) = X ∗ (fc − f ) erfüllen.
• Da fc willkürlich gewählt werden kann, existieren beliebig viele Möglichkeiten der Zuordnung.
C.2
Transformationsvorschrift für Signale
• Signale werden lt. unserer Definition so transformiert, dass diese nach der BP-TP
Transformation die gleiche Energie bzw. Leistung besitzen.
• Im Frequenzbereich gilt (GH (f ) ist die Fouriertransformierte eines Hilbert-Transformators):
GH (f )
1
XT (f ) = √ X + (f + fc ) mit
2
z }| {
X (f ) = X(f ) + j · [−j · sgn(f )]X(f ).
+
• Im Zeitbereich gilt:
1
1
xT (t) = √ x+ (t)e−j2πfc t = √ e−j2πfc t [x(t) + j · H{x(t)}] .
2
2
• Umgekehrt gilt für das Spektrum im Bandpass-Bereich:
1
1
X(f ) = √ XT (f − fc ) + √ , XT∗ (−(f + fc ))
2
2
42
• und für das Zeitsignal x(t) im Bandpass-Bereich:
i∗
1 h
1
√ xT (t)ej2πfc t + √ xT (t)ej2πfc t ,
2
2
o
n
√
j2πfc t
=
und mit xT (t) = xTr (t) + j · xTi (t),
2 · Re xT (t) e
√
√
= xTr (t) · 2 · cos(2πfc t) − xTi (t) · 2 · sin(2πfc t).
√
√
2 · xTr (t) und 2 · xTi (t) werden als Inphase- und Quadraturkomponente bezeichnet;
ej2πfc t als komplexer Träger.
x(t) =
C.3
Transformationsvorschrift für Systeme
Bandpass-Bereich
x(t)
g(t)
Tiefpass-Bereich
y(t)
xT (t)
gT (t)
yT (t)
• Gegeben sei ein LTI-Bandpass-System. Für das Ausgangssignal gilt bei reeller Impulsantwort g(t) die Beziehung: y(t) = x(t) ∗ g(t).
• Ziel: Konsistente Beschreibung im TP-Bereich gemäß: yT (t) = xT (t) ∗ gT (t).
• Abweichend zu Signalen wird für Systeme im Frequenzbereich definiert
GH (f )
z }| {
1
GT (f ) = G+ (f + fc ) mit G+ (f ) = G(f ) + j · [−j · sgn(f )]G(f ).
2
• Im Zeitbereich gilt dementsprechend:
gT (t) =
1
1 +
g (t)e−j2πfc t = e−j2πfc t [g(t) + j · H{g(t)}] .
2
2
• Die BP-TP-Zuordnung von Signalen unterscheidet sich demnach um den Faktor
der BP-TP-Zuordnung bei Systemen.
√
2 von
• Dementsprechend gilt für die Beschreibung des Systems im reellen Bandpass-Bereich
auch
– Frequenzbereich: G(f ) = GT (f − fc ) + G∗T (−(f + fc )),
– Zeitbereich:
o
n
g(t) = 2 · Re gT (t) ej2πfc t
und mit gT (t) = gTr (t) + j · gTi (t),
= gTr (t) · 2 · cos(2πfc t) − gTi (t) · 2 · sin(2πfc t).
43