und Drallsatz - Ing. Johannes Wandinger
Werbung

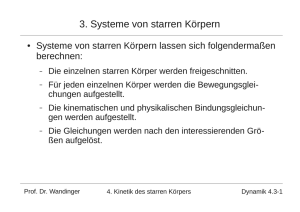
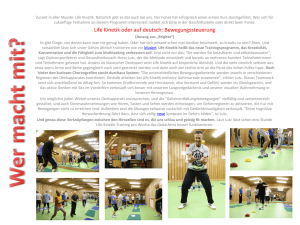
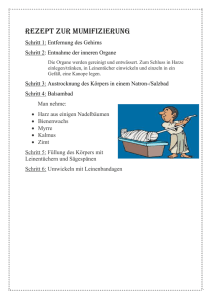
1. Impuls- und Drallsatz ● Impulssatz – ● Bewegung des Schwerpunkts des Körpers aufgrund vorgegebener Kräfte Prof. Dr. Wandinger Drallsatz – Drehung des Körpers aufgrund vorgegebener Momente 3. Kinetik des starren Körpers Dynamik 2 3.1-1 1. Impuls- und Drallsatz 1.1 Bezeichnungen 1.2 Impulssatz 1.3 Drallsatz Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-2 1.1 Bezeichnungen ω Körper K rBP rP rB O Prof. Dr. Wandinger P B rSP rBS rS 3. Kinetik des starren Körpers S K Dynamik 2 3.1-3 1.1 Bezeichnungen ● ● Punkt O ist der Ursprung des ortsfesten Bezugssystems. Punkt B ist ein körperfester Punkt, der als Ursprung eines körperfesten Bezugssystems dient. ● Punkt S ist der Schwerpunkt des Körpers. ● Punkt P ist ein allgemeiner Punkt des Körpers. Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-4 1.1 Bezeichnungen ● ● ● ● Vektor rBP ist der Ortsvektor des Punktes P im körperfesten Bezugssystem. Vektor rBS ist der Ortsvektor des Schwerpunktes S im körperfesten Bezugssystem. Vektor rSP ist der Vektor vom Schwerpunkt S zum Punkt P. Da der Körper starr ist, ändern sich die Vektoren rBP, rBS und rSP für einen körperfesten Beobachter nicht. Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-5 1.1 Bezeichnungen ● Geschwindigkeit des Punktes P: – – Für einen körperfesten Beobachter ist Punkt P in Ruhe: B v P =0 Für einen Beobachter im ortsfesten Bezugssystem hat Punkt P die Geschwindigkeit v P =v B ×r BP Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-6 1.1 Bezeichnungen ● Schwerpunkt S : – Im ortsfesten Bezugssystem gilt laut Definition m r S =∫ r P dm K – Daraus folgt für den Vektor r SP =r P −r S : ∫ r SP dm=∫ r P dm−∫ r S dm=m r S −r S m=0 K – K K Aus r BS =r BP −r SP folgt weiter: m r BS =∫ r BP dm K Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-7 1.2 Impulssatz ● dF P rP O Prof. Dr. Wandinger dm dFi Kräfte am freigeschnittenen Massenelement dm : – äußere Kräfte dF – innere Kräfte dFi – Die inneren Kräfte sind die Kräfte, die die benachbarten Massenelemente auf das betrachtete Massenelement ausüben. 3. Kinetik des starren Körpers Dynamik 2 3.1-8 1.2 Impulssatz ● ● Der Impulssatz für das Massenelement lautet: r̈ P dm=d F d F i Integration über den Körper ergibt ∫ r̈ P dm=∫ d F ∫ d F i K ● K K Wegen Actio = Reactio verschwindet das Integral der inneren Kräfte: ∫ d F i =0 ● Das Integral über die äußeren Kräfte ergibt die resultierende Kraft: ∫ d F=F K ● Aus der Definition des Schwerpunkts folgt: m r S =∫ r P dm K m r̈ S =∫ r̈ P dm K K Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-9 1.2 Impulssatz ● Damit lautet der Impulssatz für den Körper: m r̈ S = F ● Der Schwerpunkt eines starren Körpers bewegt sich so, als ob alle Kräfte an ihm angriffen und die gesamte Masse in ihm vereinigt wäre. Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-10 1.3 Drallsatz ● Aus dem Impulssatz für das Massenelement, r̈ P dm=d F d F i r BP × v̇ P dm=r BP ×d Fr BP ×d F i folgt mit v P = ṙ P : ● Integration über den Körper ergibt: ∫ r BP × v̇ P dm=∫ r BP ×d F ∫ r BP ×d F i K ● K K Die Beiträge der inneren Kräfte heben sich wegen Actio = Reactio auf: ∫ r BP ×d F i =0 K Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-11 1.3 Drallsatz ● Die Beiträge der äußeren Kräfte summieren sich zu dem resultierenden Moment der äußeren Kräfte um den Punkt B: ∫ r BP ×d F = M B K ● Damit bleibt: ∫ r BP × v̇ P dm= M B K Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-12 1.3 Drallsatz ● Das Integral lässt sich weiter umformen: – Zunächst gilt: – Wegen B v P =0 r BP × v̇ P = d r BP ×v P − ṙ BP ×v P dt gilt außerdem: ṙ BP =×r BP und v P =v B ×r BP – Damit folgt: ṙ BP ×v P = ×r BP × v B ×r BP = ×r BP ×v B Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-13 1.3 Drallsatz – Für das Integral gilt also: d r × v̇ dm= ∫ BP P ∫ dt r BP ×v P dm− ×∫ r BP dm ×v B K K K d = ∫ r BP ×v P dm− ×m r BS ×v B dt K ● Definition: Die Größe L B =∫ r BP ×v P dm K wird als Drall oder Drehimpuls bezüglich des Punktes B bezeichnet. Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-14 1.3 Drallsatz ● Damit lautet der Drallsatz in allgemeiner Form: L̇ B −m ×r BS ×v B = M B ● Der Drallsatz wird auch als Drehimpulssatz oder Momentensatz bezeichnet. Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-15 1.3 Drallsatz ● ● Speziell: Schwerpunkt als Bezugspunkt – Wird der Bezugspunkt B in den Schwerpunkt S gelegt, so gilt rBS = 0. – Damit vereinfacht sich der Drallsatz zu – Die Änderung des Dralls bezüglich des Schwerpunkts ist gleich dem Moment der äußeren Kräfte. L̇ S =M S Speziell: Bezugspunkt B ist ortsfest – Für einen ortsfesten Bezugspunkt B gilt vB = 0. – Der Drallsatz vereinfacht sich ebenfalls zu L̇ B =M B . Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-16 1.3 Drallsatz ● Beispiel: Drall der rollenden Scheibe ω vS S – Die Scheibe rollt mit der konstanten Schwerpunktsgeschwindigkeit vS und der konstanten Winkelgeschwindigkeit ω. – Gesucht ist der Drall bezüglich des Schwerpunkts. A Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-17 1.3 Drallsatz – Geometrie: ● Radius R ● Dicke d η ● S ξ d R S ● Die Mittelebene der Scheibe liegt in der ξη-Ebene des körperfesten Koordinatensystems. Der Ursprung des körperfesten Koordinatensystems ist der Schwerpunkt. ξ ζ Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-18 1.3 Drallsatz – Vektoren: ● Allgemeiner Ortsvektor: η r SP = b b b ● Ortsvektor von Punkt A: ω r SA =−R b ● S Winkelgeschwindigkeit: =− b Prof. Dr. Wandinger ξ rSP rSA P A 3. Kinetik des starren Körpers Dynamik 2 3.1-19 3.1 Drallsatz – Kinematik: v P =v S ×r SP – η Rollbedingung: ω v A =v S ×r SA =0 v S =−×r SA =− R b ×b= R b Prof. Dr. Wandinger 3. Kinetik des starren Körpers P rSP S rSA vS ξ vP A Dynamik 2 3.1-20 1.3 Drallsatz – Drall bezüglich Schwerpunkt: ● Geschwindigkeit: LS =∫ r SP ×v P dm K v P =v S ×r SP = R b − b × b b b = R b − b b = [ R b − b ] ● Integrand: r SP ×v P = b b b × [ R b − b ] 2 = [ − b − R b R b b ] 2 2 = [ b R b −R b − b ] Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-21 1.3 Drallsatz ● dm= dV = d dA Integration: d /2 ∫ dm=∫ ∫ K A −d /2 2 =d /2 =∫ 2 A A [ A 2 d dA ∫ −d /2 ] R d dA −d / 2 d /2 =∫ R A −d /2 2 d /2 ∫ R dm=∫ ∫ [ ∫ d d dA=∫ − dA=0 8 8 =−d /2 A [ ] K d dA=∫ d /2 ] d dA=0 ∫ R dm=R∫ dm=R S m=0 K Prof. Dr. Wandinger K 3. Kinetik des starren Körpers Dynamik 2 3.1-22 1.3 Drallsatz ● Das einzige Integral, das nicht verschwindet ist [ d /2 2 2 2 2 d dm= ∫ ∫ ∫ K A −d /2 ] d /2 [ dA=∫ 2 2 A ∫ ] d dA −d /2 =d ∫ 22 dA A ● In Polarkoordinaten gilt: =r cos =r sin 2 2=r 2 dA=r d dr Prof. Dr. Wandinger 3. Kinetik des starren Körpers rdφ dr dφ r Dynamik 2 3.1-23 1.3 Drallsatz ● Damit folgt: 2 2 2 R ∫ dA=∫ ∫ r A 0 0 3 2 dr d =∫ 0 4 r= R r 4 [ ] r =0 2 d =∫ 0 R4 d 4 1 1 = R4= R2 A 2 2 ● Ergebnis: 1 2 1 2 L S =− d⋅ R A b=− R m b 2 2 Prof. Dr. Wandinger 3. Kinetik des starren Körpers Dynamik 2 3.1-24