3. Systeme von starren Körpern
Werbung

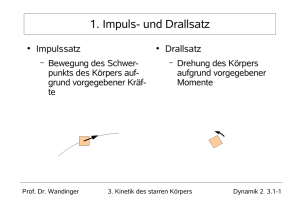
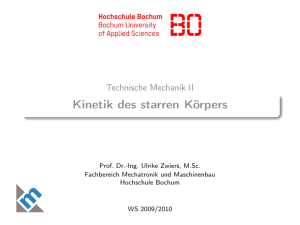
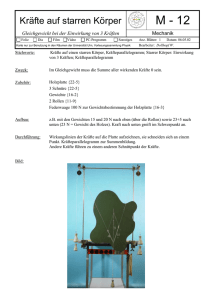
3. Systeme von starren Körpern ● Systeme von starren Körpern lassen sich folgendermaßen berechnen: – Die einzelnen starren Körper werden freigeschnitten. – Für jeden einzelnen Körper werden die Bewegungsgleichungen aufgestellt. – Die kinematischen und physikalischen Bindungsgleichungen werden aufgestellt. – Die Gleichungen werden nach den interessierenden Größen aufgelöst. Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-1 3. Systeme von starren Körpern ● Beispiel: Beschleunigendes Fahrzeug – Es wird berücksichtigt, dass die Räder eine Masse haben und sich drehen. L1 mF L2 S h mR, JR, r Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-2 3. Systeme von starren Körpern – Das Fahrzeug wird als starrer Körper der Masse mF angesehen. – Jedes der vier Räder hat die Masse mR, das Massenträgheitsmoment JR um seinen Schwerpunkt und den Radius r. – An den beiden Hinterrädern greift jeweils ein Antriebsmoment M an. – Gesucht ist die Beschleunigung a des Fahrzeugs. Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-3 3. Systeme von starren Körpern – Freigeschnittenes System: A M y Ay x M H1 GR N1 Prof. Dr. Wandinger B Bx By GF Ay Ax S Ax By Bx GR H2 N2 4. Kinetik des starren Körpers Dynamik 4.3-4 3. Systeme von starren Körpern – – Rollbedingung am Rad: v vr =0 =− r a ̇=− r ω v r Impuls- und Drallsatz für das Fahrzeug: ∑ F x =m a x : ∑ F y =0 : ∑ M S =0 : Prof. Dr. Wandinger 2 A x −B x =m F a 2 A y B y −G F =0 2 M 2 h A x −B x −2 L 1 A y 2 L 2 B y =0 4. Kinetik des starren Körpers Dynamik 4.3-5 3. Systeme von starren Körpern – Impuls- und Drallsatz für das Hinterrad: ∑ F x =m a x : ∑ F y =0 : ∑ M A=J A ̇ – − A x H 1=m R a − A y −G R N 1=0 : −M r H 1 =J R ̇ Impuls- und Drallsatz für das Vorderrad: ∑ F x =m a x : ∑ F y =0 : ∑ M B =J B ̇ Prof. Dr. Wandinger B x −H 2 =m R a −B y −G R N 2 =0 : −r H 2 =J R ̇ 4. Kinetik des starren Körpers Dynamik 4.3-6 3. Systeme von starren Körpern – Addition der Impulssätze in x-Richtung (Sätze für Räder mit 2 multipliziert) ergibt: 2 H 1 −H 2 = m F 4 m R a – Aus dem Drallsatz für das Hinterrad folgt: a M a r H 1 =M J R ̇=M −J R H 1= −J R 2 r r r – Aus dem Drallsatz für das Vorderrad folgt: r H 2 =−J R ̇= J R Prof. Dr. Wandinger a a H 2 =J R 2 r r 4. Kinetik des starren Körpers Dynamik 4.3-7 3. Systeme von starren Körpern – Einsetzen in den addierten Impulssatz führt auf JR M 2 −4 2 a= m F 4 m R a r r – m F 4 m R 4 r2 M a=2 r Damit gilt für die Beschleunigung: a= – JR 2 M /r m F 4 m R J R /r 2 Aus den restlichen Gleichungen können die Kräfte in den Radlagern ermittelt werden. Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-8 3. Systeme von starren Körpern ● ● Wenn das System nach Berücksichtigung der kinematischen Bindungen nur noch einen Freiheitsgrad hat, kann die Bewegungsgleichung für diesen Freiheitsgrad auch aus dem Arbeitssatz gewonnen werden. Lösungsweg: – Definition der kinematischen Größen – Aufstellen der kinematischen Bindungsgleichungen – Ermittlung der Ausdrücke für die Energien und Arbeiten – Ansetzen des Arbeitssatzes Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-9 3. Systeme von starren Körpern ● Beispiel: Schrägaufzug J2 , r2 M J1 , r1 mA mG α Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-10 3. Systeme von starren Körpern – Gegeben: ● ● ● ● Der Schrägaufzug mit der Gesamtmasse mA wird über eine Antriebstrommel mit dem Radius r2 und dem Massenträgheitsmoment J2 mit dem konstanten Moment M angetrieben. Die Massenträgheitsmomente der Laufräder können vernachlässigt werden. Die Umlenkrolle hat den Radius r1 und das Massenträgheitsmoment J1. Das Gegengewicht hat die Masse mG. Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-11 3. Systeme von starren Körpern – Gesucht: ● – Beschleunigung, mit der sich bewegt der Aufzug nach oben bewegt Lösungsweg: ● ● Zunächst wird mit dem Arbeitssatz die wegabhängige Geschwindigkeit des Schrägaufzugs ermittelt. Daraus kann dann die gesuchte Beschleunigung berechnet werden. Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-12 3. Systeme von starren Körpern – Kinematische Größen: φ2 sG φ1 sA NNG NNA α Prof. Dr. Wandinger 4. Kinetik des starren Körpers sG Dynamik 4.3-13 3. Systeme von starren Körpern – Kinematische Bindungen: v A = ṡ A , vG = ṡG , v G =2 v A sG =2 s A vG v A 1= ̇1= = , 2 r1 r1 vG vA 2= ̇2 = =2 r2 r2 – Lageenergie: ● Als Nullniveau für die Lageenergie des Aufzugs und des Gegengewichts wird jeweils die Ruhelage gewählt: G E A s A =m A g s A sin G E G s A =−m G g sG =−2 mG g s A sA 2 =2 r2 Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-14 3. Systeme von starren Körpern – Kinetische Energien: ● Schrägaufzug: 1 2 E s A = m A v A 2 K A ● ● ● Umlenkrolle: 1 1 J1 2 K 2 E 1 s A = J 1 1 = 2 v A 2 2 r1 Antriebstrommel: – Gegengewicht: 1 K 2 2 E G s A = m G v G =2 mG v A 2 Arbeit des Antriebsmoments: sA W M s A =M 2 =2 M r2 – Arbeitssatz: J2 2 1 2 E s A = J 2 2 =2 2 v A 2 r2 K 2 Prof. Dr. Wandinger 4. Kinetik des starren Körpers E KA E GK E 1K E 2K E GA E GG =W M Dynamik 4.3-15 3. Systeme von starren Körpern – J2 2 1 1 J1 M m A 2 mG 2 2 2 v A m A g sin −2 mG g s A=2 s A 2 2 r1 r2 r2 Geschwindigkeit: J2 2 1 1 J1 M m A 2 mG 2 2 2 v A = 2 2 mG g−m A g sin s A 2 2 r1 r2 r2 2 v 2A =2 Prof. Dr. Wandinger M 2 mG g−m A g sin r2 sA J1 J2 m A4 mG 2 4 2 r1 r2 4. Kinetik des starren Körpers Dynamik 4.3-16 3. Systeme von starren Körpern – Beschleunigung: dv A 1 d 2 a A =v A = vA ds A 2 ds A Prof. Dr. Wandinger M 2 2 mG g−m A g sin r2 a A= J1 J2 m A4 mG 2 4 2 r1 r2 4. Kinetik des starren Körpers Dynamik 4.3-17 3. Systeme von starren Körpern ● Ausblick: – Wenn das System nach Berücksichtigung der kinematischen Bindungen mehr als einen Freiheitsgrad hat, führt der Arbeitssatz nicht zum Ziel, da er nur eine Gleichung liefert. – In diesem Fall ist der Lagrange-Formalismus eine elegante Möglichkeit, die Bewegungsgleichungen aufzustellen, ohne dass die einzelnen Körper des Systems freigeschnitten werden müssen. Prof. Dr. Wandinger 4. Kinetik des starren Körpers Dynamik 4.3-18