A. Was ist und was soll die Topologie?
Werbung

Topologie
Vorlesungsmitschrieb
Autoren:
Stephan Hilb,
Verena Treitz
Universität Stuttgart
kompiliert: 10.01.2017 16:05
letzte Änderung: 04.05.2015 18:21
https://github.com/stev47/uni
Inhaltsverzeichnis
A. Was ist und was soll die Topologie?
A1. Zentrales Beispiel: Flächen . . . . . . . . . . . . . . . . . . . . . .
7
7
I.
9
Analytische Topologie
B. Metrische Räume
B1. Reelle Zahlen . . . . . . . . . . . . . . . . . . . . . .
B2. Skalarprodukt und Norm . . . . . . . . . . . . . . . .
B2.1. Skalarprodukt . . . . . . . . . . . . . . . . . .
B2.2. Norm . . . . . . . . . . . . . . . . . . . . . .
B3. Metrische Räume . . . . . . . . . . . . . . . . . . . .
B3.1. Metriken und metrische Räume . . . . . . . .
B3.2. Metriken unter Abbildungen . . . . . . . . .
B3.3. Umgebungen, Offen- und Abgeschlossenheit
B4. Konvergenz und Stetigkeit . . . . . . . . . . . . . . .
B4.1. Konvergenz von Funktionenfolgen . . . . . .
B4.2. Zusammenhang . . . . . . . . . . . . . . . . .
B4.3. Äquivalenz von Metriken . . . . . . . . . . .
B5. Vollständige metrische Räume . . . . . . . . . . . . .
B6. Kompaktheit . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
11
11
12
14
14
16
17
19
20
21
23
24
26
C. Topologische Räume
C1. Grundlagen . . . . . . . . . . . . .
C1.1. Abbildungen und Stetigkeit
C2. Umgebungen . . . . . . . . . . . . .
C2.1. Konvergenz . . . . . . . . .
C2.2. Funktionenräume . . . . . .
C2.3. Punktweise Konvergenz . .
C2.4. Gleichmäßige Konvergenz .
C2.5. Kompakte Konvergenz . . .
C3. Inneres, Abschluss, Rand . . . . . .
C4. Basen und Erzeugendensysteme . .
C4.1. Topologische Basis . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
31
33
34
36
38
38
39
39
40
42
42
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
Inhaltsverzeichnis
C4.2. Erzeugendensystem . . . . . . . . .
C4.3. Zweites Abzählbarkeitsaxiom . . . .
C4.4. Diskrete Teilmengen . . . . . . . . .
C4.5. Dichte Teilmengen . . . . . . . . . .
C5. Teilräume und Quotientenräume . . . . . . .
C5.1. Teilraumtopologie . . . . . . . . . .
C5.2. Einbettungen . . . . . . . . . . . . .
C5.3. Überdeckungen . . . . . . . . . . . .
C5.4. Verklebung stetiger Abbildungen . .
C5.5. Quotiententopologie . . . . . . . . .
C6. Summen und Produkte topologischer Räume
C6.1. Summentopologie . . . . . . . . . .
C6.2. Produkttopologie . . . . . . . . . . .
C7. Filter . . . . . . . . . . . . . . . . . . . . . .
C7.1. Von Folgen zu Filtern . . . . . . . . .
C7.2. Bildfilter . . . . . . . . . . . . . . . .
C7.3. Produkträume . . . . . . . . . . . . .
C7.4. Ultrafilter . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
43
43
44
45
46
47
48
49
50
51
53
53
54
56
56
57
58
58
D. Kompaktheit
D1. Grundlagen . . . . . . . . . . . . . . . .
D1.1. Kompaktheit unter Abbildungen
D1.2. Summen . . . . . . . . . . . . . .
D1.3. Charakterisierung durch Filter .
D1.4. Produkte . . . . . . . . . . . . . .
D2. Lokale Kompaktheit . . . . . . . . . . . .
D2.1. Topologische Vektorräume . . . .
D3. Alexandroff-Kompaktifizierung . . . . .
D4. Die Kompakt-Offen-Topologie . . . . . .
D5. Trennungsaxiome und Metrisierbarkeit .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
61
61
63
64
65
65
66
68
71
72
72
E. Zusammenhang und Homotopie
E1. Zusammenhang . . . . . . . . .
E2. Wegzusammenhang . . . . . . .
E3. Lokaler Zusammenhang . . . .
E4. Homotopie stetiger Abbildungen
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
79
79
82
84
85
Sprache der Kategorien
Kategorien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Funktoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Natürliche Transformationen . . . . . . . . . . . . . . . . . . . . .
89
89
91
93
F. Die
F1.
F2.
F3.
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Inhaltsverzeichnis
II. Geometrische Topologie
95
G. Simpliziale Komplexe
G1. Simplizialkomplexe . . . . . . . . . . . . . .
G1.1. Simplizes . . . . . . . . . . . . . . .
G1.2. Affine Simplizialkomplexe . . . . . .
G1.3. Kombinatorische Simplizialkomplexe
G2. Triangulierung topologischer Räume . . . .
G2.1. Zentrische Unterteilung . . . . . . .
G2.2. Produkte von Komplexen . . . . . .
G2.3. Euler-Charakteristik . . . . . . . . .
G3. Simpliziale Approximation . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
97
97
97
99
101
103
103
104
105
106
H. Abbildungsgrad und Topologie des Rn
H1. Die Umlaufzahl . . . . . . . . . . . . . . . . . . . . . . . .
H2. Der Abbildungsgrad . . . . . . . . . . . . . . . . . . . . . .
H3. Satz vom Igel . . . . . . . . . . . . . . . . . . . . . . . . . .
H4. Der Satz von Borsuk-Ulam . . . . . . . . . . . . . . . . . .
H5. Invarianz der Dimension, des Randes und der Orientierung
H6. Jordan-Schoenflies . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
109
109
111
112
113
115
116
I. Klassifikation der Flächen
I1. Mannigfaltigkeiten . . . . . . . . . .
I2. Projektive Räume . . . . . . . . . . .
I2.1.
Reell-projektive Räume . . . .
I3. Klassifikation geschlossener Flächen .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
119
119
120
121
121
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
III. Algebraische Topologie
J. Die
J1.
J2.
J3.
J4.
Fundamentalgruppe π1 (X, x0 )
Das Fundamentalgruppoid π(X) . . . . . . . . . . . . . . .
Die Fundamentalgruppe eines punktierten Raumes (X, x0 )
Polygonale Fundamentalgruppe . . . . . . . . . . . . . . .
Simpliziale Fundamentalgruppe . . . . . . . . . . . . . . .
J4.1.
Anwendung auf berandete Flächen . . . . . . . . .
J4.2.
Abelsch-Machung . . . . . . . . . . . . . . . . . .
J4.3.
Projektive Räume . . . . . . . . . . . . . . . . . . .
125
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
127
127
129
131
132
133
134
135
K. Überlagerungen
137
K1. Überlagerungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
K2. Hochhebung von Wegen . . . . . . . . . . . . . . . . . . . . . . . 139
5
Inhaltsverzeichnis
K3. Galois-Korrespondenz . . . . . . . . . . . . . . . . . . . . . . . . . 142
6
A. Was ist und was soll die
Topologie?
Dieser Frage wollen wir natürlich im Laufe der gesamten Vorlesung auf den Grund
gehen. Deshalb zunächst eine vorläufige Antwort: Topologie ist qualitative Geometrie.
Homöomorphie gehört zu den Begriffen, mit denen die Topologie qualitative Aussagen über die Geometrie verschiedener Räume macht.
Beispiel A0.1
Ränder von Dreiecken, Quadraten und Kreisen sind homöomorph. Flächen von
Dreiecken, Quadraten und Kreisen sind homöomorph. Die Ränder sind jedoch
nicht zu den Flächen homöomorph.
A1. Zentrales Beispiel: Flächen
Definition A1.1
Eine (berandete) Fläche ist ein metrischer Raum, der lokal homöomorph ist zu
R2+ := {(x, y) ∈ R2 | x ≥ 0}
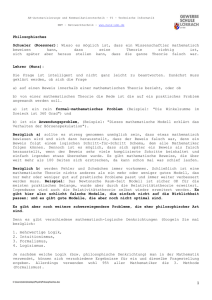
Beispiel A1.2
Zu g ∈ N, r ∈ N≥1 betrachten wir
+
−
Fg,r
:= Fg,r
:=
+
Flächen ohne Rand: Fg+ := Fg,0
, Fg− := Fg+ /{±1}.
±
sind kompakte und zusammenhängende Flächen.
Diese Beispiele Fg,r
Es stellen sich folgende Fragen
1) Ist unsere Liste vollständig?
2) Ist unsere Liste redundanzfrei?
Beispiel A1.3
±
Sind diese Beispiele homöomorph zu Fg,r
?
7
14.10.2013
A | Was ist und was soll die Topologie?
Satz A1.4 (Klassifikation der kompakten Flächen)
Jede kompakte, zusammenhängende Fläche F ist homöomorph zu genau einem
±
der Modelle Fg,r
.
Wir werden in dieser Vorlesung wie folgt vorgehen:
1. Analytische Topologie
2. Geometrische Topologie
3. Algebraische Topologie
8
Teil I.
Analytische Topologie
9
B. Metrische Räume
B1. Reelle Zahlen
Satz B1.1 (Existenz und Eindeutigkeit der reellen Zahlen)
Es existiert ein vollständiger, geordneter Körper (R, +, ·, <).
Je zwei solcher Körper sind isomorph mittels eines eindeutig bestimmten Körperisomomorphismus.
B2. Skalarprodukt und Norm
B2.1. Skalarprodukt
Definition B2.1 (Skalarprodukt)
Sei V ein linearer Raum. Eine Abbildung ⟨ · , · ⟩ : V × V → C heißt Skalarprodukt, falls folgende Eigenschaften erfüllt sind:
(S0) ⟨x, x⟩ ∈ R≥0 ,
(S1) ⟨x, x⟩ > 0 für x ̸= 0,
(S2) ⟨y, x⟩ = ⟨x, y⟩,
(S3) ⟨x, λy + µz⟩ = λ⟨x, y⟩ + µ⟨x, z⟩.
Wir nennen einen linearen Raum V mit Skalarprodukt auch Prähilbertraum.
Bemerkung
(S0) bis (S3) enthalten ein redundante Eigenschaft, so ist z.B. die Eigenschaft
(S0) redundant, da sie aus (S1) und (S3) folgt.
Definition B2.2
Sei K ∈ {R, C}. Auf dem Vektorraum V := Kn definiert ⟨ · , · ⟩ : V × V → K
⟨
⟩
(x1 , . . . , xn ), (y1 , . . . , yn ) := x1 y1 + · · · + xn yn .
das Standardskalarprodukt auf K.
11
B | Metrische Räume
Beispiel B2.3
Sei Ω eine Menge, KΩ := {f : Ω → K},
{
}
K(Ω) = f : Ω → K : f hat endlichen Träger .
Dann ist
∑
⟨f, g⟩ :=
f (x)g(x)
x∈Ω
ein Skalarprodukt auf K(Ω) .
Beispiel B2.4
Auf V = C([a, b], C) ist
∫
⟨f, g⟩ =
1
b−a
b
f (x)g(x)dx
a
ein Skalarprodukt.
15.10.2013
B2.2. Norm
Satz B2.5
Sei V ein K-Vektorraum und ⟨ · , · ⟩ ein Skalarprodukt. Dann gilt die CauchySchwartz-Ungleichung (CSU):
|⟨u, v⟩|2 ≤ ⟨u, u⟩⟨v, v⟩.
√
Hieraus folgt für die Norm |u| := ⟨u, u⟩
(N0) |0| = 0
(N1) |v| > 0 für v ̸= 0
(N2) |λv| = |λ||v| für v ∈ V, λ ∈ K.
(N3) |u + v| ≤ |u| + |v| (Dreiecksungleichung)
Beweis:
Übung
□
Definition B2.6
Eine Norm auf V ist eine Abbildung | · | : V → R≥0 , die (N0-3) erfüllt. V mit
| · | nennen wir dann normierter Vektorraum.
Beispiel B2.7
Auf Rn gibt es folgende besonders bekannte Normen:
12
Skalarprodukt und Norm | B2
• Taxinorm oder ℓ1 -Norm:
|x|1 = |x1 | + · · · + |xn |.
• Euklidische Norm oder ℓ2 -Norm:
√
|x|2 = |x1 |2 + · · · + |xn |2 .
• Supremumsnorm oder ℓ∞ -Norm:
|x|∞ := sup{|x1 |, . . . , |xn |}
• Allgemeine ℓp -Norm (1 ≤ p < ∞):
(
) p1
|x|p := |x1 |p + · · · + |xn |p
Bemerkung
Im Rn gilt
|x|∞ ≤ |x|2 ≤ |x|1 ≤ n|x|∞
Beispiel B2.8
Sei K ∈ {R, C} und Ω eine beliebigen Menge. Wir schreiben
KΩ := Abb(Ω, K) := {f : Ω → K};
∥f ∥∞ := |f |Ω := sup{|f (x)| : x ∈ Ω};
) p1
(
∑
∥f ∥p :=
|f (x)|p ,
(1 ≤ p < ∞);
x∈Ω
{
}
ℓ (Ω) := f : Ω → K : ∥f ∥p < ∞ ,
p
(1 ≤ p ≤ ∞).
ℓp (Ω) ist mit ∥ · ∥p ein normierter Vektorraum.
Beispiel B2.9
Sei K ∈ {R, C}. Sei Ω ⊆ Kn messbar, f : Ω → K messbar,
(∫
) p1
p
∥f ∥p :=
|f (x)| dx
{ x∈Ω
}
Lp (Ω) := f : Ω → K : ∥f ∥p < ∞
Aus ∥f ∥p = 0 folgt nur f = 0 fast überall, also ist ∥ · ∥p auf Lp (Ω) noch keine
Norm. Setze
{
}
N := f : Ω → K : f (x) = 0 für fast alle x ∈ Ω
Lp := Lp /N
Auf Lp (Ω) ist ∥ · ∥p nun tatsächlich eine Norm.
13
B | Metrische Räume
Beispiel B2.10
Für Matrizen A ∈ Km×n setze
(
|A| :=
m ∑
n
∑
|aij |2
) 12
.
i=1 j=1
Dies ist die euklidische Norm auf Kmn . Sie erfüllt
|AB| ≤ |A||B|,
A ∈ Km×n , B ∈ Kn×m .
Insbesondere also auch |Av| ≤ |A||v| für v ∈ Kn (= Kn×1 ).
Beispiel B2.11
Kn×n ist eine Algebra über K mit Norm |A| wie oben.
Definition B2.12
Eine normierte K-Algebra ist eine Algebra (Ai ) über K mit einer Norm | · | :
A → R≥0 , sodass |uv| ≤ |u||v| für alle u, v ∈ A gilt.
Beispiel B2.13
Sei K = R, C. Beispiele für normierte Algebren sind
• Kn×n
• ℓ∞ (Ω, K)
B3. Metrische Räume
B3.1. Metriken und metrische Räume
Definition B3.1 (Metrik)
Eine Metrik auf einer Menge X ist eine Abbildung d : X × X → [0, ∞], die
folgende Eigenschaften erfüllt:
(M0) d(x, x) = 0,
(M1) d(x, y) > 0 für x ̸= y,
(M2) d(x, y) = d(y, x),
(M3) d(x, z) ≤ d(x, y) + d(y, z).
Das Paar (X, d) heißt dann metrischer Raum.
Definition B3.2 (Halbmetrik)
Eine Halbmetrik auf X ist eine Abbildung d : X × X → [0, ∞], die (M0), (M2),
(M3) aus B3.1 erfüllt.
14
Metrische Räume | B3
Bemerkung
Im Gegensatz zur Metrik dürfen also x ̸= y existieren mit d(x, y) = 0.
Beispiel B3.3
Der euklidische Abstand im Rn ,
d(x, y) := |x − y|2 :=
√
(x1 − y1 )2 + · · · + (xn − yn )2
ist eine Metrik und definiert den euklidischen metrischen Raum (X, d).
Beispiel B3.4
Auf einer beliebigen Menge X lässt sich die diskrete Metrik durch
{
d(x, y) =
0 x=y
,
1 x=
̸ y
definieren. Wir nennen (X, d) dann einen diskreten metrischen Raum.
Beispiel B3.5
Die französische Eisenbahnmetrik d : Rn × Rn → R≥0 ist gegeben durch
{
|x − y|2
d(x, y) :=
|x|2 + |y|2
Rx = Ry
.
Rx ̸= Ry
Beispiel B3.6 (Teilräume)
Ist (X, d) ein metrischer Raum und A ⊆ X, dann ist dA := dA×A : A × A →
[0, ∞] eine Metrik auf A.
Beispiel B3.7 (Produkträume)
∏
Seien (X, di ) mit i ∈ I metrische Räume. Auf X =
i∈I Xi (dem Produktraum) erhalten wir die Supremumsmetrik
d(x, y) := sup{di (xi , yi ) : i ∈ I}.
Beispiel B3.8 (Abbildungsräume)
Sei X eine Menge und (Y, dy ) ein metrischer Raum. Der Raum Y X =
Abb(X, Y ) trägt die Metrik
d(f, g) := sup{dy (f (x), g(x)) : x ∈ X},
wobei f, g : X → Y .
15
B | Metrische Räume
B3.2. Metriken unter Abbildungen
Definition B3.9
Eine isometrische Einbettung von (X, dX ) in (Y, dY ) ist eine Abbildung f :
X → Y mit
dX (a, b) = dY (f (a), f (b))
für alle a, b ∈ X.
Ist f bijektiv, so heißen f Isometrie und die beiden metrischen Räume (X, dX ),
(Y, dY ) isometrisch.
Bemerkung
• Die Forderung dX (a, b) = dY (f (a), f (b)) liefert Stetigkeit und Injektivität umsonst.
• Die isometrische Einbettung ist auch eine Einbettung gemäß C5.9. Insbesondere induziert jede isometrische Einbettung einen Homöomorphis∼
=
mus X −
→ f (X) gemäß B4.2 und C1.15.
Beispiel B3.10
Verschiebungen, Drehungen und Spiegelungen auf Rn sind Isometrien.
Beispiel B3.11
Sei m ≤ n, dann ist f : Rn → Rn mit
f (x1 , . . . , xm ) = (x1 , . . . , xm , 0, . . . , 0)T
eine isometrische Einbettung.
Beispiel B3.12
Die Räume ℓ2 (Z, C) und L2 ([0, 2π], C) sind isometrisch dank Fourier-Analyse/Synthese.
Bei der isometrischen Einbettung wurde dX (a, b) = dY (f (a), f (b)) gefordert.
Betrachte nun eine schwächere Aussage. Seien (X, dX ), (Y, dY ) metrische Räume.
Jede Funktion f : X → Y erfüllt
ld(a, b) ≤ d(f (a), f (b)) ≤ Ld(a, b)
für alle a, b ∈ X mit den Konstanten l = 0, L = ∞. Fordert man nun nicht-triviale
Konstanten, so erhält man die folgende Definition.
Definition B3.13
Seien (X, dX ), (Y, dY ) metrische Räume und f : X → Y eine Funktion. Wir
nennen f Lipschitz-stetig wenn
l · dX (a, b) ≤ dY (f (a), f (b)) ≤ L · dX (a, b)
16
Metrische Räume | B3
für ein L mit 0 ≤ L < ∞ und für alle a, b ∈ X gilt.
Ist zusätzlich 0 < l ≤ L < ∞, so heißt f bi-Lipschitz-stetig.
Beispiel B3.14
• f ist Isometrie genau dann, wenn l = L = 1 genügt.
• f ist konstant genau dann, wenn L = 0 genügt.
Beispiel B3.15
• f : [0, 1] → [0, 1], f (x) = x2 ist lipschitz-stetig vermöge L = 2, l = 0.
√
• g : [0, 1] → [0, 1], g(x) = x ist nicht lipschitz-stetig, es genügt L =
∞, l = 12 .
B3.3. Umgebungen, Offen- und Abgeschlossenheit
Definition B3.16
In einem metrischen Raum (X, d) ist der offene Ball um a ∈ X mit Radius
r ∈ [0, ∞] die Menge
B(a, r) := B(X,d) (a, r) := {x ∈ X : d(a, x) < r}.
Der abgeschlossene Ball ist
B(a, r) := B (X,d) (a, r) := {x ∈ X : d(a, x) ≤ r}.
Definition B3.17
Bezüglich eines metrischen Raumes (X, d) führen wir folgende Begriffe ein:
• Eine Menge U ⊆ X heißt Umgebung von a in (X, d), wenn ε > 0 existiert,
sodass B(X,d) (a, ε) ⊆ U .
• Die Menge U heißt offen in (X, d), wenn sie Umgebung jedes Punktes a ∈ U
ist.
• Eine Menge A ⊆ X heißt abgeschlossen in (X, d), wenn X \ A offen in
(X, d) ist.
Die Familie aller offenen Mengen heißt Topologie des Raumes (X, d).
Proposition B3.18
• Jeder offene Ball ist offen.
• Jeder abgeschlossene Ball ist abgeschlossen.
• (O1) ∅, X sind offen.
(O2) U1 , . . . , Un offen =⇒ U1 ∩ · · · ∩ Un offen.
(O3) Ui offen (i ∈ I) =⇒
∪i∈I Ui offen.
17
B | Metrische Räume
• (A1) ∅, X sind abgeschlossen.
(A2) A1 , . . . , An abgeschlossen =⇒ A1 ∪ · · · ∪ An offen.
(A3) Ai abgeschlossen (i ∈ I) =⇒
∩i∈I Ai offen.
Beweis:
□
Übung.
Proposition B3.19
In einem metrischen Raum (X, d) ist eine Menge A ⊆ M genau dann abgeschlossen, wenn für jede konvergente Folge (xn )n∈N in X mit xn ∈ A der
Grenzwert in A liegt: xn → a ∈ A.
Beweis:
„ =⇒ “: Sei (xn )n∈N mit xn ∈ A konvergent gegen a ∈ X und X \ A offen.
Angenommen a ∈ X \ A, dann existiert ε > 0 mit B(a, ε) ∩ A = ∅.
Also xn ̸→ a, ein Widerspruch, also a ∈ A.
„ ⇐= “: Angenommen X \ A nicht offen, d.h.
∃x ∈ X \ A ∀ε > 0 ∃aε ∈ B(x, ε) : aε ∈ A.
Definiere damit die Folge (xn ) mit xn := a n1 ∈ A. (xn ) konvergiert per
definitionem gegen x ∈ X, aber x ̸∈ A, ein Widerspruch.
□
Definition B3.20
Zu M ⊆ X definieren wir das Innere von M in (X, d) durch
{
}
M̊ := x ∈ X M ist Umgebung von x in (X, d)
{
}
= x ∈ X ∃ε > 0B(x, ε) ⊆ M
{
}
U ⊆ M : U ist offen in (X, d) .
=
∪
Der Abschluss (oder abgeschlossene Hülle) von M in (X, d) ist
{
}
M := x ∈ X Jede Umgebung von x in (X, d) schneidet M
{
}
= x ∈ X ∀ε > 0 : B(x, ε) ∩ M ̸= ∅
{
}
A ⊇ M A ist abgeschlossen in (X, d)
=
∩
Der Rand ∂M von M in (X, d) ist
∂M := M \ M̊
18
Konvergenz und Stetigkeit | B4
Konvention B3.21
Im Rn betrachten wir
Dn := {x ∈ Rn : x21 + · · · + x2n ≤ 1},
Bn := {x ∈ Rn : x21 + · · · + x2n < 1},
Sn−1 := {x ∈ Rn : x21 + · · · + x2n = 1}.
In Übungsaufgabe Blatt1, S4.1 wird gezeigt, dass es sich hierbei um n-, bzw.
n − 1-dimensionale Mannigfaltigkeiten handelt, siehe auch Kapitel I1.
21.10.2013
Bemerkung B3.22
Wir verwenden für ein Mengensystem A die folgende Notation für die Vereinigung über alle enthaltenen Mengen
∪A = ∪ A = ∪A .
i
A∈A
i∈I
B4. Konvergenz und Stetigkeit
Sei im Folgenden (X, d) stets ein metrischer Raum.
Definition B4.1
Eine Folge (xn )n∈N in X konvergiert gegen a ∈ X, wenn d(xn , a) → 0, d.h.
∀ε > 0 ∃m ∈ N ∀n ≥ m : d(xn , a) < ε,
oder mit anderen Worten: Jede Umgebung von a enthält fast alle Folgenglieder.
Definition B4.2
Eine Funktion f : X → Y heißt stetig in einem Punkt a ∈ X, wenn
∀ε > 0 ∃δ > 0 : ∀x ∈ X : dX (x, a) < δ =⇒ dY (f (x), f (a)) < ε.
Die Funktion f : X → Y heißt stetig (auf ganz X), wenn
∀a ∈ X ∀ε > 0 ∃δ > 0 ∀x ∈ X : dX (x, a) < δ =⇒ dY (f (x), f (a)) < ε
und gleichmäßig stetig, wenn
∀ε > 0 ∃δ > 0 ∀x, a ∈ X : dX (x, a) < δ =⇒ dY (f (x), f (a)) < ε
Die Menge aller stetigen Abbildung f : X → Y bezeichnen wir mit C(X, Y ).
Ist f bijektiv und sowohl f , als auch f −1 stetig, so heißt f Homöomorphismus.
19
B | Metrische Räume
Satz B4.3
Seien (X, dX ), (Y, dY ) metrische Räume und f : X → Y , dann sind äquivalent:
1) f ist stetig gemäß B4.2,
2) f ist folgenstetig, d.h. aus xn → a in X folgt f (xn ) → f (a) in Y ,
3) Für V ⊆ Y offen ist f −1 (V ) ⊆ X offen,
4) Für V ⊆ Y abgeschlossen ist f −1 (V ) ⊆ X abgeschlossen.
Beweis:
□
Übungsaufgabe Blatt1, V2.2.
B4.1. Konvergenz von Funktionenfolgen
Definition B4.4
Eine Folge fn : X → Y konvergiert punktweise gegen f : X → Y , wenn für
alle x ∈ X gilt fn (x) → f (x), d.h.
∀x ∈ X ∀ε > 0 ∃m ∈ N ∀n ≥ m : dY (fn (x), f (x)) ≤ ε.
Hingegen konvergiert fn : X → Y gleichmäßig gegen f : X → Y , wenn
∀ε > 0 ∃m ∈ N ∀n ≥ m ∀x ∈ X : dY (fn (x), f (x)) ≤ ε,
|
{z
}
⇐⇒ d(fn ,f )≤ε
wobei
d(f, g) := sup{dY (f (x), g(x)) : x ∈ X}.
Beispiel B4.5
Sei fn : [0, 1] → R, fn (x) := xn . Dann konvergiert (fn ) punktweise gegen
f : [0, 1] → R mit f (x) = 0 für 0 ≤ x < 1 und f (x) = 1 für x = 1.
Die Konvergenz ist nicht gleichmäßig, denn
|fn − f |[0,1] = 1
Beispiel B4.6
∑n
Die Polynome fn (x) =
k=0
f (x) = cos(x).
(−1)k 2k
2k! x
konvergieren in jedem x ∈ R gegen
Die Konvergenz ist jedoch nicht gleichmäßig, denn es gilt
|fn − f |R = ∞.
Wir haben aber immerhin gleichmäßige Konvergenz auf jedem Kompaktum
[−r, r] ⊆ R.
20
Konvergenz und Stetigkeit | B4
Satz B4.7
Konvergiert fn → f gleichmäßig und sind alle fn stetig, so auch f .
Beweis:
Siehe Übungsaufgabe Blatt1, S3.3.
□
B4.2. Zusammenhang
Satz B4.8 (Zwischenwertsatz)
Jede stetige Funktion f : X := [a, b] → R hat die Zwischenwerteigenschaft
(siehe auch E1.1): zu y ∈ R mit f (a) ≤ y ≤ f (b) existiert x ∈ R mit x ∈ [a, b]
mit f (x) = y.
Bemerkung
Die Vollständigkeit von R ist hierfür wesentlich: die stetige Funktion f :
Q → Q mit f (x) = x2 − 2 hat nicht die ZWE, da f (1) = −1 < 0 und
f (2) = 2 > 0, aber es existiert kein x ∈ Q mit f (x) = 0.
Beweis:
Siehe Übungsaufgabe Blatt0, 1.2.
□
Satz B4.9
Für jeden metrischen Raum (X, d) sind folgende Aussagen äquivalent:
(1) Jede stetige Funktion f : X → R hat die Zwischenwerteigenschaft,
(2) Für jede stetige Funktion f : X → R ist f (X) ⊆ R ein Intervall,
(3) Jede stetige Funktion f : X → {0, 1} ⊆ R ist konstant.
(4) Für jede offene Zerlegung X = A ⊔ B gilt A = ∅ oder B = ∅.
In diesem Fall nennen wir (X, d) zusammenhängend.
Beweis:
(1) =⇒ (2) =⇒ (3) sind klar.
(3) =⇒ (4)
Sei X = A ⊔ B eine offene Zerlegung und f : X → {0, 1} ⊆ R mit
f (A) = {0} und f (B) = {1}. f ist stetig, also konstant und somit A = ∅
oder B = ∅.
(4) =⇒ (1)
Angenommen f : X → R stetig und zu a, b ∈ X existiert y ∈ R mit
f (a) < y < f (b) aber y ̸∈ f (X). Dann wäre A = f −1 (R<y ) und
B = f −1 (R>y ) eine offene Zerlegung von X. Wegen a ∈ A und b ∈ B
widerspricht dies (4).
□
21
B | Metrische Räume
Beispiel B4.10
• Jedes Intervall I ⊆ R ist zusammenhängend (gerade die Aussage des Zwischenwertsatzes, B4.8).
• R \ {a} ist nicht zusammenhängend (A = R<a , B = R>a sind nichtleere
offene Zerlegungen).
Satz B4.11
Ist f : X → Y stetig und X zusammenhängend, so ist auch f (X) ⊆ Y zusammenhängend.
Beweis:
Ist f (X) nicht zusammenhängend, also f (X) = A⊔B eine offene Zerlegung
mit A ̸= ∅ ̸= B, dann auch X = f −1 (A) ⊔ f −1 (B) und somit X nicht
zusammenhängend.
□
Definition B4.12
Ein Weg im Raum X ist eine stetige Abbildung γ : [0, 1] → X. Dabei heißt γ(0)
Anfangspunkt und γ(1) Endpunkt.
Der Raum X heißt wegzusammenhängend, wenn zu jedem Paar a, b ∈ X ein
Weg von a nach b in X existiert (d.h. γ : [0, 1] → X stetig mit γ(0) = a, γ(1) =
b).
Beispiel B4.13
Rn ist wegzusammenhängend.
Rn \ {x0 } ist wegzusammenhängend für n ≥ 2
Sn ist wegzusammenhängend für n ≥ 1.
Satz B4.14
Jeder wegzusammenhängende Raum ist zusammenhängend. Die Umkehrung
gilt im Allgemeinen nicht.
Beweis:
Angenommen X = A ⊔ B sei offene Zerlegung mit a ∈ A und b ∈ B.
Dann existiert ein Weg γ : [0, 1] → X mit γ(0) = a und γ(1) = b. Also
ist [0, 1] = f −1 (A) ⊔ f −1 (B) eine offene Zerlegung mit 0 ∈ f −1 (A) und
1 ∈ f −1 (B), ein Widerspruch.
Betrachte als Gegenbeispiel
{
} (
)
X := (x, sin( x1 )) x ∈ R > 0 ∪ {0} × [0, 1] .
X ist zusammenhängend, aber nicht wegzusammenhängend.
22
□
Konvergenz und Stetigkeit | B4
B4.3. Äquivalenz von Metriken
Definition B4.15
Zwei Metriken d, e : X × X → [0, ∞] heißen (topologisch) äquivalent, wenn
sie die selben offenen Mengen definieren.
Wir nennen d feiner als e (oder e gröber als d), wenn jeder ε-Ball von e einen
δ-Ball von d enthält, d.h.
∀a ∈ X ∀ε > 0 ∃δ > 0 : B(X,d) (a, δ) ⊆ B(X,e) (a, ε).
Proposition B4.16
Seien d, e Metriken auf einer Menge X. Dann sind folgende Aussagen äquivalent:
(1) d ist feiner als e
(2) Jede Umgebung bezüglich e ist auch Umgebung bezüglich d.
(3) Jede offene Menge bezüglich e ist auch offene Menge bezüglich d.
(4) Die Identität Id : (X, d) → (X, e), x 7→ x ist stetig.
(5) Gilt xn → a bezüglich d, dann auch xn → a bezüglich e.
(6) Ist f : X → Y stetig bezüglich e, dann auch bezüglich d.
(7) Ist f : Y → X stetig bezüglich d, dann auch bezüglich e.
Seien | · | und ∥ · ∥ zwei Normen auf einem K-Vektorraum V . | · | ist genau dann
feiner als ∥ · ∥, wenn ein L ∈ R>0 existiert mit ∥x∥ ≤ L|x| für alle x ∈ V . Insbesondere sind | · | und ∥ · ∥ genau dann äquivalent, wenn l, L ∈ R>0 existiert,
sodass
l|x| ≤ ∥x∥ ≤ L|x|
für alle x ∈ X gilt.
Beispiel B4.17
Sei 1 ≤ p < q ≤ ∞.
(1) Auf Rn sind die ℓp -Norm und die ℓq -Norm äquivalent.
(2) Auf RN ist die ℓp -Norm echt feiner als die ℓq -Norm.
Betrachte dazu
{
fn (k) =
n− p
0
1
1≤k≤n
.
k>n
Es gilt
|fn |p = 1,
|fn |q = n q − p → 0
1
1
(n → ∞).
23
B | Metrische Räume
(3) Auf C([a, b], R) ist die Lq -Norm echt feiner als die Lp -Norm.
(4) Auf CC (R, R) (stetige Funktionen mit kompaktem Träger) sind Lq - und
Lp -Norm unvergleichbar.
Beispiel B4.18 (Äqivalente, gestauchte Metriken)
Ist d : X ×X → [0, ∞] eine Metrik, so auch die gestauchte Metrik d′ : X ×X →
[0, 1], definiert durch
d(x,y)
d′ (x, y) := 1+d(x,y)
.
Hieraus lässt sich d rekonstruieren durch
d(x, y) =
d′ (x,y)
1−d′ (x,y) .
Diese beiden sind äquivalent, d.h. sie definieren die selben Topologien.
Gleiches gilt für die gekappte (oder gestutzte) Metrik, gegeben durch
d∗ (x, y) := min{d(x, y), 1}.
Für A, B ⊆ X und a, b ∈ X definieren wir
d(a, B) := inf{d(a, b) : b ∈ B},
d(A, B) := inf{d(a, b) : a ∈ A, b ∈ B}.
22.10.2013
B5. Vollständige metrische Räume
Definition B5.1
Eine Folge (xn )n∈N in einem metrischen Raum (X, d) heißt Cauchy-Folge, wenn
∀ε > 0 ∃n ∈ N, ∀p, q ≥ n : d(xp , xq ) ≤ ε.
Wir nennen (X, d) vollständig, wenn jede Cauchy-Folge in (X, d) einen Grenzwert in X besitzt.
Bemerkung B5.2
Jede konvergente Folge ist eine Cauchy-Folge, aber im Allgemeinen nicht umgekehrt.
Beispiel B5.3
In X =]0, 1] ist xn = 2−n eine Cauchy-Folge, aber nicht konvergent.
∑n 1
In Q ist xn =
k=0 k! eine Cauchy-Folge, aber nicht konvergent.
24
Vollständige metrische Räume | B5
Satz B5.4
R ist vollständig (bezüglich der üblichen euklidischen Metrik).
Ebenso C und Rn , Cn für n ≥ 1.
Satz B5.5
Seien (Xi , di ) vollständige metrische Räume für i ∈ I. Dann ist auch X =
∏
i∈I Xi vollständig bezüglich der Supremums-Metrik
d(x, y) := sup{di (xi , yi ) : i ∈ I}.
Beweis:
Sei (xn )n∈N eine Cauchy-Folge in (X, d). Dann ist für i ∈ I auch jede
Komponenten-Folge (xn,i )n∈N eine Cauchy-Folge in (Xi , di ). Dank Vollständigkeit existiert xi ∈ Xi mit xn,i → xi . Definiere x = (xi )i∈I ∈ X.
Zu ε > 0 existiert m ∈ N sodass für n, k > m gilt
di (xn,i , xk,i ) ≤ ε
Für k → ∞ erhalten wir
di (xn,i , xi ) ≤ ε
für n ≥ m und i ∈ I. Also d(xn , x) ≤ ε für n ≥ m und somit xn → x.
□
Lemma B5.6
Sei (X, d) vollständig und A ⊆ X. Dann ist (A, dA ) vollständig genau dann,
wenn A in X abgeschlossen ist.
Beweis:
Nutze B3.19:
„ =⇒ “: Sei (xn )n∈N eine konvergente Folge in X mit xn ∈ A, dann ist
(xn )n∈N auch Cauchy-Folge in A, also xn → a ∈ A.
„ ⇐= “: Sei (xn )n∈N eine Cauchy-Folge in A, dann ist (xn )n∈N auch eine
Cauchy-Folge in X, also konvergent. Wegen der Abgeschlossenheit also
xn → a ∈ A.
□
Satz B5.7
Ist (Y, dY ) vollständig, so auch Abb(X, Y ) = Y X mit der Supremumsmetrik.
Hierin ist C(X, Y ) abgeschlossen und somit ebenfalls vollständig.
Beweis:
Anwenden von B5.5.
□
25
B | Metrische Räume
Beispiel B5.8
C([0, 1] → R) sind vollständig bezüglich der Supremums-Metrik.
Das Prinzip der Vollständigkeit hat in der Analysis viele Anwendungen: Banachscher Fixpunktsatz, Satz von Picard-Lindelöf, Potenzreihen (in R, C oder BanachAlgebren).
B6. Kompaktheit
Definition B6.1
Ein metrischer Raum (X, d) heißt kompakt, wenn jede offene Überdeckung eine
endliche Teilüberdeckung enthält, d.h. zu jeder Überdeckung X = ∪i∈I Ui mit
n
Ui ⊆ X offen existieren i1 , . . . , in ∈ I mit X = ∪k=1 Uik .
Beispiel B6.2
• Für (X, d) mit diskreter Metrik ist (X, d) genau dann kompakt, wenn X
endlich ist.
• Rn ist nicht kompakt.
Beweis:
Betrachte
Rn =
∪ B(0, n).
n∈N
Hier existiert keine endliche Teilüberdeckung.
□
Definition B6.3
Wir nennen δ ∈ R>0 Lebesgue-Zahl einer Überdeckung X = ∪i∈I Ui , wenn
zu jedem x ∈ X ein Index j ∈ I existiert, sodass B(x, δ) ⊆ Uj gilt.
Beispiel B6.4
• Ist (X, d) diskret, dann ist δ ∈]0, 1] Lebesgue-Zahl zu jeder Überdeckung,
denn B(x, δ) = {x}.
• Betrachte
R=
∪ ]n − 1, n + 1[.
n∈Z
Hier ist jede Zahl δ ∈]0, 12 ] Lebesgue-Zahl.
• Betrachte
R=
∪ ] log n, log(n + 2)[,
n∈N
wobei log 0 := −∞. Hierzu existiert keine Lebesgue-Zahl, denn für n ≥ 1
26
Kompaktheit | B6
gilt
n→∞
| log(n + 2) − log(n)| = log( n+2
−−−→ 0.
n )−
Definition B6.5
Ein metrischer Raum (X, d) heißt totalbeschränkt, wenn zu jedem ε > 0 endliche viele Punkte a1 , . . . , an ∈ X existieren mit X = B(an , ε) ∪ . . . ∪ B(an , ε).
Bemerkung B6.6
Jeder totalbeschränkte Raum ist auch beschränkt, umgekehrt im Allgemeinen
jedoch nicht.
Beweis:
Für alle x ∈ X ist
{
}
d(x, a1 ) < ε + max d(a1 , ak ) : k = 2, . . . , n =: R,
also X ⊆ R(a1 R) und somit X beschränkt.
Als Gegenbeispiel betrachte ℓ∞ (N, R). In diesem Raum ist B(0, 1) beschränkt, aber nicht totalbeschränkt: für die kanonische (abzählbar unendliche) Basis (en )n∈N gilt nämlich
|en − em |∞ = 1
Für ε =
1
2
n ̸= m.
kann B(ai , ε) aber höchstens ein en enthalten.
□
Proposition B6.7
In Rn ist jede beschränkte Menge A ⊆ Rn total beschränkt.
Beweis:
Übung.
□
Satz B6.8 (Charakterisierung kompakter metrischer Räume)
Sei (X, d) ein metrischer Raum. Dann sind folgende Eigenschaften äquivalent:
(1) (X, d) ist kompakt gemäß B6.1.
(2) Abzählbare Kompaktheit: Jede abzählbare Überdeckung enthält eine endliche Teilüberdeckung.
(3) Häufungspunkte: Jede Folge (xn )n∈N in X hat einen Häufungspunkt a ∈
X.
(4) Folgenkompaktheit: Jede Folge (xn )n∈N in X hat eine in X konvergente
Teilfolge.
(5) Pseudokompaktheit: Jede stetige Funktion f : X → R nimmt Minimum
und Maximum an, d.h. es gibt a, b ∈ X mit f (a) ≤ f (x) ≤ f (b) für alle
x ∈ X.
27
B | Metrische Räume
(6) Lebesgue-Kompaktheit: (X, d) ist totalbeschränkt und jede offene Überdeckung erlaubt eine Lebesgue-Zahl.
(7) Heine-Borel-Lebesgue-Kompaktheit: (X, d) ist totalbeschränkt und vollständig.
Beweis:
(1) =⇒ (2): Dies ist trivial.
(2) =⇒ (3)
Sei (xn )n∈N eine Folge und En = {xk : k ≥ n}. Dann ist An = En
abgeschlossen und Un = X \ An offen. Wegen E0 ⊇ E1 ⊇ · · · ⊋ ∅ gilt
A0 ⊇ A1 ⊇ · · · ⊋ ∅ und U0 ⊆ U1 ⊆ · · · ⊊ X.
Offenbar ist jeder Punkt a ∈ A := ∩n∈N An ein Häufungspunkt von
(xn )n∈N . Angenommen A = ∅, dann wäre
X=X\
∩A
n
n∈N
=
∪U
n
n∈N
eine abzählbare offene Überdeckung ohne endliche Teilüberdeckung, ein
Widerspruch zur Voraussetzung. Also besitzt (xn )n∈N einen Häufungspunkt.
(3) =⇒ (4)
Sei (xn )n∈N eine Folge in X mit Häufungspunkt a ∈ X. Wähle n0 ∈ N beliebig. Für jedes k ∈ N≥1 enthält B(a, 2−k ) unendlich viele Folgenglieder
xn , also existieren nk > nk−1 mit xnk ∈ B(a, 2−k ). Dann ist xnk → a.
(4) =⇒ (5)
Es existiert eine Folge (xn ) in X mit f (xn ) → sup f . Nach Voraussetzung besitzt (xn )n∈N eine konvergente Teilfolge (xnk )k∈N Grenzwert b.
Es gilt weiterhin f (xnk ) → sup f und dank Stetigkeit f (xnk ) → f (b),
also f (b) = sup f .
(5) =⇒ (6)
Zeige, dass jede offene Überdeckung eine Lebesgue-Zahl erlaubt und dass
(X, d) totalbeschränkt ist.
Lebesgue-Zahl
Sei X Pseudokompakt und X = ∪i∈I Ui offene Überdeckung, Ai =
X \ Ui . Dann ist f : X → R ∪ {∞} mit
f (x) = sup{d(x, Ai ) : i ∈ I}
stetig (sogar lipschitz-stetig, Übung). Dank (5) existiert x0 ∈ X mit
f (x0 ) = inf f . Für jedes x ∈ X existiert i ∈ I mit x ∈ Ui , also
x ̸∈ Ai . Da Ai abgeschlossen ist, folgt d(x, Ai ) > 0 (siehe Übung),
28
Kompaktheit | B6
also f (x) > 0. Insbesondere gilt inf f = f (x0 ) > 0. Jedes δ ∈]0, inf f [
ist eine Lebesgue-Zahl.
Totalbeschränktheit
Angenommen es existiert ε > 0 sodass für jede endliche Familie
a1 , . . . , an ∈ X gilt B(a1 , ε) ∪ · · · ∪ B(an , ε) ⊊ X. Per Induktion
k−1
existierten damit für k ∈ N ak ∈ X \ ∪i=1 B(ai , ε) mit d(ak , aj ) ≥ ε
für alle k ̸= j. Die Funktionen fn : X → [0, 1] mit
{
}
fn (x) = max 0, 1 − 3ε d(x, an )
sind stetig mit paarweise disjunktem Träger supp fn ⊆ B(an , 3ε ). Also
ist
∑
nfn (x)
f (x) =
n∈N
stetig, aber nach oben unbeschränkt, besitzt also insbesondere kein Maximum.
(6) =⇒ (7)
Sei (xn )n∈N eine Cauchy-Folge in (X, d). Angenommen zu jedem a ∈ X
existiert ε > 0 sodass Ua = B(a, ε) nur endlich viele xn enthält. Zur
Überdeckung
X=
Ua
∪
a∈X
existiert nach Voraussetzung eine Lebesgue-Zahl 0 < δ ≤ ε nach (6). Wegen Totalbeschränktheit existiren a1 , . . . , an mit X = B(a1 , δ) ∪ . . . ∪
B(an , δ). Da jedes B(ak , δ) ⊆ Uak nur endlich viele xn enthält, besitzt
(xn )n∈N nur endlich viele Folgengleieder, ein Widerspruch. Es gibt folglich mindestens einen Häufungspunkt a ∈ x.
Da (xn ) Cauchy-Folge ist, kann a nur einziger Häufungspunkt sein, also
xn → a.
(7) =⇒ (4)
(0)
Sei (xk )k∈N ein Folge in X. Wir definieren nun für jedes n ∈ N≥1 Folgen
(n)
(xk )k∈N .
Sei also n ∈ N≥1 . Nach Voraussetzung existieren a1 , . . . , am ∈ X mit
m
X = ∪k=1 B(ak , 2−n ). Mindestens eines der B(ak , 2−n ) enthält un(0)
(n)
endlich viele Folgenglieder von (xk )n∈N . Sei (xk )n∈N die Teilfolge be(n)
(n)
stehend aus diesen Folgengliedern. Es gilt d(xp , xq ) < 21−n für alle
p, q ∈ N.
(k)
Definiere (ξk )k∈N durch ξk := xk als Diagonalfolge. (ξk )k∈N ist eine
Cauchy-Folge, da d(ξp , ξq ) < 21−n für alle p, q ≥ n ∈ N≥1 ist. Nach
29
B | Metrische Räume
(0)
Voraussetzung konvergiert (ξk )k∈N schließlich als Teilfolge von (xk )k∈N
in X.
(6) =⇒ (1)
Sei X = ∪i∈I Ui eine Überdeckung von X. Nach Voraussetzung existiert
eine Lebesgue-Zahl δ > 0, sodass ∀x ∈ X ∃j(x) ∈ I : B(x, δ) ⊆ Uj(x) .
Da X nach Voraussetzung totalbeschränkt ist, existieren a1 , . . . , an ∈ X
n
mit X = ∪k=1 B(ak , δ). Damit ist
n
X=
n
∪ B(a , δ) ⊆ ∪ U
k
k=1
j(ak )
k=1
endliche Teilüberdeckung von X = ∪i∈I Ui .
30
□
C. Topologische Räume
28.10.2013
C1. Grundlagen
Definition C1.1
Eine Topologie auf einer Menge X ist ein System T ⊆ P(X) von Teilmengen
von X mit folgenden Eigenschaften:
(O1) ∅, X ∈ T ,
(O2) O1 , . . . , On ∈ T =⇒ O1 ∩ · · · ∩ On ∈ T ,
(O3) Oi ∈ T für i ∈ I =⇒
∪i∈I Oi ∈ T .
Das Paar (X, T ) nennen wir dann topologischer Raum.
Eine Teilmenge Y ⊆ X nennen wir offen, wenn Y ∈ T , und abgeschlossen,
wenn X \ Y ∈ T .
Beispiel C1.2 (Kleinste Beispiele)
• X = ∅, T = {∅},
• X = {a}, T = {∅, X},
• Für X = {a, b} gibt es vier Topologien:
{∅, X},
{∅, {a}, X},
{∅, {b}, X},
{∅, {a}, {b}, X}.
• Die Anzahl möglicher Topologien auf einer Menge mit n Elementen wird
in C.1 dargestellt.
Beispiel C1.3 (diskrete Topologie)
T = P(X) auf X.
Beispiel C1.4 (indiskrete Topologie)
T = {∅, X} auf X.
Beispiel C1.5 (metrische Topologie)
Sei d : X × X → [0, ∞] eine Metrik auf einer Menge X. Dann ist die metrische
Topologie auf (X, d) gegeben durch
{
}
Td := O ⊆ X : ∀a ∈ O ∃ε > 0 : B(a, ε) ⊆ O
31
C | Topologische Räume
n = |x|
0
1
2
3
4
5
tn = Anzahl der Topologien auf X
1
1
4
29
355
6942
Tabelle C.1.: Anzahl der Topologien auf einer Menge X mit n Elementen, asym2
ptotisches Verhalten: log tn ∼ n4
{
}
= O ⊆ X : ∀a ∈ O ∃ε > 0 : d(a, x) < ε =⇒ x ∈ O .
Bemerkung
Die offenen Mengen hinsichtlich einer metrischen Topologie Td auf X entsprechen den offenen Mengen gemäß B3.17 auf dem metrischen Raum (X, d).
Definition C1.6 (metrisierbare Topologie)
Eine Topologie T heißt metrisierbar, wenn es eine Metrik d gibt mit T = Td .
Beispiel C1.7
Die diskrete Topologie ist metrisierbar (dank der diskreten Metrik).
Die indiskrete Topologie hingegen nicht (für |x| ≥ 2). (Jede metrische Topologie trennt je zwei Punkte a ̸= b, die indiskrete Topologie tut das nicht, siehe
auch C2.11).
Definition C1.8
Sind T1 ⊆ T2 ⊆ P(X) Topologien auf X, so nennen wir T1 gröber als T2 , bzw.
T2 feiner als T1 .
Beispiel C1.9 (Ordnungstopologie)
Sei (X, <) eine linear geordnete Menge (z.B. (R, <)). Wir nennen O ⊆ X offen,
wenn zu jedem x ∈ O ein offenes Intervall I ⊆ X existiert mit x ∈ I ⊆ O. Das
System T< dieser offener Mengen heißt Ordnungstopologie von (X, <).
Beispiel C1.10 (Koendliche Topologie)
Setze
T := {O ⊆ X : X \ O ist endlich} ∪ {∅}.
32
Grundlagen | C1
Beispiel C1.11 (Koabzählbare Topologie)
Setze
T := {O ⊆ X : X \ O ist abzählbar} ∪ {∅}.
Bemerkung C1.12
Es gilt stets
Tindiskret ⊆ Tkoendlich ⊆ Tkoabzählbar ⊆ Tdiskret
(der Feinheit nach geordnet: nach links hin gröber, nach rechts hin feiner).
C1.1. Abbildungen und Stetigkeit
Bemerkung C1.13
Seien X, Y beliebige Mengen mit Teilmengen U, Ui ⊆ X, V, Vi ⊆ Y . Es gelten
die folgenden Zusammenhänge (leichte Übung):
)
(
)
(
Ui =
f (Ui ),
f −1
Vi =
f (Vi )
f
(
f
∪
∪
)
∩ U ⊆ ∩ f (U ),
i∈I
i∈I
i
i∈I
i
f
−1
i∈I
f (X \ U ) ̸= Y \ f (U ),
(
∪
∩
)
∩ V = ∩ f (V )
i∈I
i∈I
i
i∈I
i
i∈I
f −1 (Y \ V ) = X \ f (Vi ).
Man sieht, dass sich die Umkehrfunktionen besser bezüglich den Mengenoperationen verhalten. Dies wird im Folgenden für weiterführende Definitionen
interessant.
Definition C1.14
Eine Abbildung f : (X, TX ) → (Y, TY ) heißt
• stetig, wenn
∀V ∈ TY : f −1 (V ) ∈ TX .
• offen, wenn
∀U ∈ TX : f (U ) ∈ TY .
• abgeschlossen, wenn
∀X \ A ∈ TX : Y \ f (A) ∈ TY .
Bemerkung
Diese Eigenschaften sind voneinander unabhängig, d.h. man findet Beispiele, die jeweils unterschiedliche Eigenschaften abdecken. In Tabelle C.2 sieht
man Beispiele für stetige Funktionen, welche Offen- und Abgeschlossenheit
jeweils unterschiedlich erfüllen. Entsprechende Beispiele für nicht-stetige
Funktionen erhält man durch Modifikation dieser an einem Punkt
33
C | Topologische Räume
f :R→R
x 7→ x
x 7→ x2
x 7→ arctan(x)
1
x 7→ 1+x
2
stetig
✔
✔
✔
✔
offen
✔
✘
✔
✘
abgeschlossen
✔
✔
✘
✘
Tabelle C.2.: Beispiele stetiger Funktionen für Offen- und Abgeschlossenheit
Definition C1.15
Ein Homöomorphismus f : (X, TX ) → (Y, TY ) ist eine bijektive Abbildung
f : X → Y , sodass f und f −1 stetig sind.
Bemerkung C1.16
Auch für bijektives f folgt aus der Stetigkeit von f im Allgemeinen nicht die
Stetigkeit von f −1 . Betrachte dazu folgende Gegenbeispiele:
• f : [1, 2[∪[3, 4[→ [1, 3[ definiert durch
{
x
x ∈ [1, 2[
f (x) =
.
x − 1 x ∈ [3, 4[
Anschaulich gesprochen „flickt“ f beide Intervalle zusammen, während f −1
sie wieder „zerreißt“. f ist bijektiv und stetig, aber kein Homöomorphismus.
• f : [0, 1[→ S1 ⊆ C definiert durch
f (t) = e2πit = (cos(2πt), sin(2πt))
ist bijektiv, stetig, aber kein Homöomorphismus (es gibt sogar keinen Homöomorphismus zwischen [0, 1[ und S1 , siehe dazu auch H2.6).
C2. Umgebungen
Sei im folgenden (X, T ) ein topologischer Raum, x ∈ X.
Definition C2.1
Eine Menge O heißt offene Umgebung von x in (X, T ), wenn x ∈ O ∈ T gilt.
Die Menge aller offenen Umgebungen von x in (X, T ) bezeichnen wir mit
UxO := UxO (T ) := {O ∈ T : x ∈ O}.
Eine Menge U heißt Umgebung von x in (X, T ), wenn sie eine offene Umgebung von x enthält. Die Menge aller Umgebungen von x in (X, T ) bezeichnen
34
Umgebungen | C2
wir mit
{
}
Ux := Ux (T ) := U ⊆ X : ∃O ∈ T : x ∈ O ⊆ U
Definition C2.2
Eine Familie Bx ⊆ Ux heißt Umgebungsbasis von x in (X, T ), wenn jede Umgebung U von x eine Umgebung V ∈ Bx enthält.
Bemerkung
Ux lässt sich dann darstellen durch
{
}
Ux = U ⊆ X : ∃V ∈ Bx : V ⊆ U .
Beispiel C2.3
• Ux ist eine Umgebungsbasis, ebenso UxO .
• In jedem metrischen Raum (X, d) bilden die Bälle B(a, ε) um a ∈ X mit
ε > 0 eine Umgebungsbasis von a, ebenso B(a, k1 ) mit k ∈ N≥1 (diese ist
sogar abzählbar).
Definition C2.4 (Stetigkeit in einem Punkt)
Eine Abbildung f : (X, TX ) → (Y, TY ) heißt stetig im Punkt a ∈ X, wenn aus
V ∈ Uf (a) stets f −1 (V ) ∈ Ua folgt.
Definition C2.5 (Erstes Abzählbarkeitsaxiom)
Ein topologischer Raum (X, T ) erfüllt das erste Abzählbarkeitsaxiom (1AA),
wenn jeder Punkt a ∈ X eine abzählbare Umgebungsbasis besitzt.
Bemerkung
Hat a eine abzählbare Umgebungsbasis (Vn )n∈N , so hat a auch eine abzählbare offene Umgebungsbasis, etwa (V̊n )n∈N . Durch Übergang zu Un := V̊0 ∩
· · · ∩ V̊n erhalten wir sogar eine offene Basis der Form U0 ⊇ U1 ⊇ U2 ⊇ · · · .
Beispiel C2.6
1. Jeder metrische Raum erfüllt das erste Abzählbarkeitsaxiom mit Umgebungsbasis Bi := {B(x, k1 ) | k ∈ N≥1 }.
2. Auf einer überabzählbaren Menge X, etwa X = R, erfüllen die koendliche und die koabzählbare Topologie das erste Abzählbarkeitsaxiom nicht.
Wegen des vorigen Beispiels sind diese also nicht metrisierbar.
35
C | Topologische Räume
C2.1. Konvergenz
Definition C2.7 (Konvergenz)
Eine Folge (xn )n∈N in X konvergiert gegen a ∈ X bezüglich T , wenn jede
Umgebung U von a in (X, T ) fast alle Folgenglieder enthält, d.h.
∀U ∈ Ua (T ) ∃m ∈ N ∀n ≥ m : xn ∈ U.
Wir schreiben dann
T
(xn )n∈N −
→ a.
Proposition C2.8
Eine Folge (xn ) in X konvergiert gegen a ∈ X genau dann, wenn
∀V ∈ Ba ∃m ∈ N ∀n ≥ m : xn ∈ V.
Grenzwerte sind im Allgemeinen nicht eindeutig, betrachte dazu folgendes Beispiel:
Beispiel C2.9
Ist (X, {∅, X}) ein indiskreter Raum, so konvergiert jede Folge gegen jeden
beliebigen Punkt a ∈ X.
Definition C2.10
Ein topologischer Raum (X, T ) heißt hausdorffsch, wenn zu je zwei Punkten
a ̸= b in X disjunkte Umgebungen existieren, d.h. U ∈ Ua , V ∈ Ub , so dass
U ∩ V = ∅.
Beispiel C2.11
Jeder metrische Raum ist hausdorffsch.
Satz C2.12
Ist (X, T ) hausdorffsch, dann hat jede Folge in X höchstens einen Grenzwert
in X.
Die Umkehrung gilt, wenn (X, T ) das erste Abzählbarkeitsaxiom erfüllt.
Beweis:
Sei (xn ) eine Folge in X mit xn → a und xn → b. Angenommen a ̸= b, dann
existieren mit der Hausdorff-Eigenschaft U ∈ Ua , V ∈ Ub mit U ∩ V = ∅,
ein Widerspruch zu xn → a, xn → b.
Zeige nun die Umkehrung unter der Voraussetzung des ersten Abzählbarkeitsaxioms. Sei dazu a, b ∈ X mit a ̸= b und seien Ba bestehend aus
U0 ⊇ U1 ⊇ · · · und Bb bestehend aus V0 ⊇ V1 ⊇ · · · zwei absteigende,
abzählbare Umgebungsbasen (siehe Bemerkung in C2.5) von a, bzw. b. Wenn
36
Umgebungen | C2
i, j ∈ N existieren mit Ui ∩ Vj = ∅, so sind wir fertig. Angenommen jedoch,
für alle i, j ∈ N ist Ui ∩ Vj ̸= ∅. Definiere dann die Folge (zi )i∈N durch
zi ∈ Ui ∩ Vi ̸= ∅.
Für jedes U ∈ Ba existiert damit m ∈ N, sodass zn ∈ U für n ≥ m und
analog für Bb . Also konvergiert zi → a und zi → b. Da jede Folge nach
Voraussetzung höchstens einen Grenzwert in X besitzt, gilt a = b, ein Widerspruch. Somit ist die Aussage gezeigt.
□
29.10.2013
Satz C2.13
Jede Umgebungsbasis Bx von x in (X, T ) erfreut sich folgender Eigenschaften
(UB1) Bx ̸= ∅ ∧ ∀U ∈ Bx : x ∈ U ⊆ X,
(UB2) ∀U, V ∈ Bx ∃W ∈ Bx : W ⊆ U ∩ V .
Erfüllt ein System von Umgebungsbasen (Bx )x∈X die Bedingungen (UB1-2),
dann wird die Topologie
{
}
TBX := O ⊆ X : Zu jedem x ∈ O existiert ein Ux ∈ Bx mit Ux ⊆ O
auf X induziert und Bx ist für jedes x ∈ X eine Umgebungsbasis von x im
Raum (X, TBX ).
Beweis:
TBX ist eine Topologie:
(O1) folgt aus (UB1).
(O2) folgt aus (UB2): Für U, V ∈ TBX ist W := U ∩ V ∈ TBX zu zeigen. Zu
x ∈ W = U ∩ V existieren Ux ∈ Bx mit Ux ⊆ U und Vx ∈ Bx mit
Vx ⊆ V . Mit (UB2) existieren Wx ∈ Bx mit Wx ⊆ Ux ∩ Vx :
x ∈ Wx ⊆ Ux ∩ Vx ⊆ U ∩ V = W.
Somit gilt W ∈ TBX .
(O3) gilt nach Konstruktion.
□
Beispiel C2.14
1.) Metrische Topologien sind vorgegeben durch
Bx := {B(x, ε) : ε > 0},
2.) Ordnungstopologien durch
Bx := {]a, b[: a < x < b}.
37
C | Topologische Räume
C2.2. Funktionenräume
Wir betrachten jetzt Funktionenräume, speziell den Raum aller Funktionen f :
R → R. Sei dazu im Folgenden stets fn : R → R eine Funktionenfolge und
f : R → R eine Funktion.
C2.3. Punktweise Konvergenz
Bekanntermaßen konvergiert fn punktweise gegen f genau dann, wenn
∀x ∈ R : fn (x) → f (x),
oder ausführlicher: wenn
∀x ∈ R ∀ε > 0 ∃m ∈ N ∀n ≥ m : |fn (x) − f (x)| < ε.
Es wäre naheliegend, Umgebungen folgendermaßen zu definieren:
U (f ; x, ε) := {g : R → R : |g(x) − f (x)| < ε}.
Diese erfüllen (UB1), aber nicht (UB2). Für J ⊆ R endlich und ε ∈ R>0 definieren
wir deshalb
U (f ; J, ε) := {g : R → R : ∀x ∈ J : |g(x) − f (x)| < ε}.
Diese erfüllen (UB1) und auch (UB2), denn
U (f ; J ∪ J ′ , min{ε, ε′ }) ⊆ U (f ; J, ε) ∩ U (f, J ′ , ε′ )
Die Umgebungsbasis Bf := {U (f, J, ε | J ⊆ X endlich, ε > 0}. definiert eine
Topologie Tpw (“pointwise”) gemäß C2.13.
Mit dieser Topologie gilt punktweise Konvergenz fn → f genau dann, wenn
Tpw
fn −−→ f .
Satz C2.15
Tpw erfüllt das Hausdorff-Axiom, aber nicht das erste Abzählbarkeitsaxiom. Insbesondere ist die Topologie Tpw also nicht metrisierbar.
Beweis:
Seien f, g ∈ X mit f ̸= g, d.h. es existiert x ∈ R mit d := |f (x) − g(x)| > 0.
Wähle U := U (f ; {x}, d2 ), V := U (g, {x}, d2 ) als Umgebungen um f , bzw. g.
Dann ist U ∩ V = ∅, denn für h ∈ U ∩ V wäre
d = |f (x) − g(x)|
≤ |f (x) − h(x)| + |h(x) − g(x)| <
38
d
2
+
d
2
= d,
Umgebungen | C2
ein Widerspruch. Also ist Tpw hausdorffsch.
Angenommen (Un )n∈N ist eine abzählbare Umgebungsbasis der Nullfunktion, dann existiert für jede Umgebung Un eine endliche Menge Jn ⊆ R und
εn > 0 mit U (0; Jn , εn ) ⊆ Un . Die Menge J = ∪k∈N Jk ⊆ R ist abzählbar,
also R \ J ̸= ∅. Für x0 ∈ R \ J enthält die Umgebung U (0; {x0 }, 1) keine
der Umgebungen Un , denn für jedes n ∈ N ist mit der Wahl
{
0 x∈J
f (x) :=
2 x∈R\J
f ∈ Un , aber f ̸∈ U (0; {x0 }, 1).
□
C2.4. Gleichmäßige Konvergenz
Wir wissen, fn → f konvergiert gleichmäßig, wenn
∀ε > 0 ∃m ∈ N ∀n ≥ m ∀x ∈ R : |fn (x) − f (x)| ≤ ε,
|
{z
}
|fn −f |R ≤ε
also genau dann, wenn
|fn − f |R → 0.
Die gleichmäßige Konvergenz wird also gewissermaßen von der Supremumsnorm
„kontrolliert“. Naheliegend sind demnach folgende Umgebungen:
U (f, ε) := B(f, ε) = {g : R → R : ∀x ∈ R : |g(x) − f (x)| < ε}.
Die Umgebungsbasis Bx , bestehend aus all diesen Umgebungen (für alle ε > 0),
erfüllt (UB1-2) und definiert so die Topologie Tuni (“uniform convergence”). Tuni
ist eine metrische Topologie bezüglich der Supremumsmetrik
d(f, g) := |f − g|R := sup |f (x) − g(x)|.
x∈R
C2.5. Kompakte Konvergenz
Mit den Begriffen der punktweisen und gleichmäßigen Konvergenz ergibt sich al∑ ∞ xk
lerdings noch ein Problem: Potenzreihen wie exp(x) =
k=0 k! oder sin(x) =
∑∞
∑
2k+1
2k
∞
k x
k x
k=0 (−1) (2k+1)! oder cos(x) =
k=0 (−1) (2k)! konvergieren punktweise
für jedes x ∈ R, aber nicht gleichmäßig auf R. Um diesen Potenzreihen einen passenderen Konvergenzbegriff zu geben, definieren wir die kompakte Konvergenz.
39
C | Topologische Räume
Wir sagen, fn → f konvergiert kompakt genau dann, wenn fn |[−r,r] → f |[−r,r]
gleichmäßig auf jedem kompakten Intervall [−r, r] konvergiert, also genau dann,
wenn
∀r ∈ R>0 ∀ε ∈ R>0 ∃m ∈ N ∀n ≥ n ∀x ∈ [−r, r] : |fn (x) − f (x)| ≤ ε .
|
{z
}
|fn −f |[−r,r]≤ε
Für K = [−r, r] und ε > 0 setzen wir
U (f ; K, ε) := {g : R → R : ∀x ∈ K : |f (x) − g(x)| < ε}.
Dies erfüllt offensichtlich (UB1) und auch (UB2), denn
U (f ; K ∪ K ′ , min{ε, ε′ }) ⊆ U (f ; K, ε) ∩ U (f ; K ′ , ε′ )
und erzeugt damit die Topologie Tkpkt .
Satz C2.16
fn konvergiert gegen f auf jedem Kompaktum genau dann, wenn fn → f
bezüglich Tkpkt konvergiert.
Bemerkung C2.17
Es gilt
Tpw ⊊ Tkpkt ⊊ Tuni .
Satz C2.18
Tkpkt ist metrisierbar.
Beweis:
Idee: für k ∈ N betrachte dk (f, g) := |f − g|[−k,k] und
d(f, g) =
∞
∑
2−k d∗k (f, g) ∈ [0, 1],
k=1
wobei d∗k die auf [0, 1] gekappte Metrik ist. d(f, g) ist dann eine Metrik auf
RR und induziert Tkpkt (siehe dazu Übungsaufgabe S 4.1, Blatt 3).
□
C3. Inneres, Abschluss, Rand
Sei (X, T ) ein topologischer Raum und M ⊆ X. Ein Punkt x ∈ X heißt
• innerer Punkt von M in (X, T ), wenn
M ∈ Ux .
40
Inneres, Abschluss, Rand | C3
• äußerer Punkt von M in (X, T ), wenn
(X \ M ) ∈ Ux .
• Berührungspunkt von M in (X, T ), wenn
∀U ∈ Ux : U ∩ M ̸= ∅.
• Randpunkt von M in (X, T ), wenn
∀U ∈ Ux : U ∩ M ̸= ∅ =
̸ U ∩ (X \ M ).
• Häufungspunkt von M in (X, T ), wenn
∀U ∈ Ux : (U \ {x}) ∩ M ̸= ∅.
• isolierter Punkt von M in (X, T ), wenn
∃U ∈ Ux : U ∩ M = {x}.
Definition C3.1
Wir definieren das Innere einer Menge M ⊆ X als
M̊ := KT (M ) := {x ∈ X : M ∈ Ux }
=
∪{U ∈ T : U ⊆ M },
den Abschluss als
M := HT (M ) := {x ∈ X : ∀U ∈ Ux : U ∩ M ̸= ∅}
=
∩{A ⊇ M : X \ A ∈ T }
und den Rand als
∂M := M \ M̊ ,
bzw. δT (M ) := HT (M ) \ KT (M ).
Satz C3.2 (Charakterisierung des Abschlusses durch Folgen)
Sei (X, T ) ein topologischer Raum, A ⊆ X und x ∈ X. Wenn es eine Folge
(an )n∈N aus A gibt mit an → x in (X, T ), dann gilt x ∈ A.
Die Umkehrung gilt, wenn das 1AA erfüllt, d.h. x eine abzählbare Umgebungsbasis hat.
41
C | Topologische Räume
Definition C3.3
Eine Teilmenge M ⊆ X heißt
• dicht in (X, T ), wenn M = X,
• diskret in (X, T ), wenn jeder Punkt x ∈ M isoliert ist.
Beispiel C3.4
Q ⊆ R ist dicht, Z ⊆ R ist diskret.
C4. Basen und Erzeugendensysteme
C4.1. Topologische Basis
Definition C4.1 (Basis)
Eine Teilmenge B ⊆ T heißt Basis der Topologie T , wenn jede offene Menge
U ∈ T eine Vereinigung von offenen Mengen aus B ist, also
}
{
T =
S:S⊆B .
∪
Beispiel C4.2
1) Jede Topologie T hat eine Basis, z.B. B = T .
2) Die übliche Topologie auf R hat als Basis B = {]a, b[: a < b}.
3) Jeder metrische Raum (X, Td ) hat als Basis B = {B(a, ε) : a ∈ X, ε > 0}.
04.11.2013
Proposition C4.3
Sei (X, T ) ein topologischer Raum und B ⊆ T . Dann sind folgende Aussagen
äquivalent:
1) B ist Basis von T , d.h.
2)
3)
∀U ∈ T ∃S ⊆ B : U =
∀U ∈ T : U =
∪ S,
∪{B ∈ B : B ⊆ U },
∀U ∈ T ∀x ∈ U ∃B ∈ B : x ∈ B ⊆ U.
Demnach ist B genau dann eine Basis von T , wenn Bx := {B ∈ B : x ∈ B}
für jedes x ∈ X eine Umgebungsbasis ist.
Beweis:
1) =⇒ 2) =⇒ 3) =⇒ 1) lässt sich einfach nachvollziehen.
42
□
Basen und Erzeugendensysteme | C4
Satz C4.4
Jede Basis B einer Topologie T auf X erfreut sich folgender Eigenschaften
(B1) X = ∪ B,
(B2) Für U, V ∈ B existiert S ⊆ B mit
U ∩V =
∪ S.
Erfüllt umgekehrt B ⊆ P(X) die Bedingungen (B1-2), so ist
{
}
T =
S:S⊆B
∪
eine Topologie auf X mit Basis B.
C4.2. Erzeugendensystem
Satz C4.5 (Erzeugendensystem)
Sei S ⊆ P(X). Setze
{
}
B := S1 ∩ . . . ∩ Sn : n ∈ N, S1 , . . . , Sn ∈ S
{
}
T :=
B′ : B′ ⊆ B .
∪
Dann ist T die gröbste (kleinste) Topologie, die S enthält und B ist eine Basis
von T .
Wir nennen S ein Erzeugendensystem (oder Subbasis) von T .
Beispiel C4.6
• Ist S selbst eine Topologie, dann ist S = B = T .
• Für S = ∅ ist B = {X} (leerer Schnitt ist X), T = {∅, X}.
• Aus
{
}
S = ]a, +∞[, ] − ∞, b[: a, b ∈ R
erhalten wir
{
}
B = S ∪ {R} ∪ ]a, b[: a < b ∈ R ,
T = Ordnungstopologie (übliche Topologie) auf R.
C4.3. Zweites Abzählbarkeitsaxiom
Definition C4.7 (Zweites Abzählbarkeitsaxiom)
Ein topologischer Raum (X, T ) erfüllt das zweite Abzählbarkeitsaxiom (2AA),
wenn für T eine abzählbare Basis existiert.
43
C | Topologische Räume
Beispiel C4.8
• Betrachte X := R mit der üblichen Topologie T und der Basis B = {]a, b[:
a, b ∈ R}. Eine abzählbare Basis wäre
{
}
B′ = ]a, b[: a, b ∈ Q ⊆ B.
Also erfüllt R das zweite Abzählbarkeitsaxiom.
• Betrachte X := Rn mit der euklidischen Topologie T und Basis
{
}
B = ]a1 , b1 [× · · · ×]an , bn [: a1 < b1 , . . . , an < bn in R .
Werden ai , bi rational gewählt, so erhält man eine abzählbare Basis für Rn .
Satz C4.9
Ist B eine Basis der Topologie T auf X, dann ist
Φ : T → P(B) : Φ(U ) := {B ∈ B : B ⊆ U }
injektiv. Ist B abzählbar, so folgt
card(T ) ≤ card(R) = card(Rn ).
Bemerkung
Sei T die euklidische Topologie auf Rn (n ≥ 1). Nach C4.8 besitzt Rn eine abzählbare Basis, also gilt mit C4.9 card(T ) ≤ card(R) und dank der Injektion
R → T : r 7→ B(0, r) sogar
card(T ) = card(R).
Beweis:
Φ ist injektiv, da sich wegen U = ∪ Φ(U ) eine Umkehrabbildung Φ−1 :
P(B) → T : S 7→ ∪ S mit Φ−1 ◦ Φ = Id definieren lässt.
□
C4.4. Diskrete Teilmengen
Lemma C4.10
Sei (X, T ) ein topologischer Raum mit Basis B. Zu jeder diskreten Teilmenge
A ⊆ X existiert eine Injektion A
B, also card(A) ≤ card(B).
Beweis:
Zu a ∈ A existiert eine Umgebung Ua ∈ T mit Ua ∩ A = {a}. Somit
existiert Ba ∈ B mit a ∈ Ba ⊆ Ua . Die Zuordnung a 7→ Ba ist injektiv,
denn Ba ∩ A = {a} liefert a zurück.
□
44
Basen und Erzeugendensysteme | C4
Satz C4.11
Sei Cb (R, R) der Vektorraum aller stetigen und beschränkten Funktionen f :
R → R mit der Supremumsnorm |f | := sup{|f (x)| : x ∈ R}.
(Cb (R, R), | · |) erfüllt das erste Abzählbarkeitsaxiom, aber nicht das zweite.
Beweis:
Sei A = {0, 1}Z (überabzählbar). Jede Folge a = (ak )k∈Z ∈ A definiert
fa : R → R durch
fa (x) := (1 − t)ak + tak+1 ,
x = k + t, k ∈ Z, t ∈ [0, 1]
(lineare Splineinterpolation). Die Zuordnung A → Cb (R, R) : a 7→ fa ist
injektiv, denn a = fa |Z . Die Menge {fa : a ∈ A} ist also überabzählbar und
diskret, denn |fa − fb | = 1 für a ̸= b. Also ist nach C4.10 jede Basis von
Cb (R, R) überabzählbar.
□
C4.5. Dichte Teilmengen
Satz C4.12
Erlaubt T eine abzählbare Basis B, dann auch eine abzählbare dichte Teilmenge
A ⊆ X.
Beweis:
Zu B ∈ B mit B ̸= ∅ wählen wir aB ∈ B beliebig. Die Menge A = {aB :
B ∈ B} ist abzählbar und dicht, denn zu jeder offenen Menge U ̸= ∅ existiert
∅ ̸= B ∈ B mit B ⊆ U , also ist aB ∈ B ⊆ U (siehe auch Definition des
Abschlusses C3.1).
□
Definition C4.13
Ein topologischer Raum (X, T ) heißt separabel, wenn eine abzählbare dichte
Teilmenge A ⊆ X existiert.
Satz C4.14
Sei (X, d) ein metrischer Raum und A ⊆ X eine abzählbare dichte Teilmenge.
Dann ist
{
}
B = B(a, k1 ) : a ∈ A, k ∈ N≥1 .
eine abzählbare Basis von (X, d). Insbesondere ist damit das zweite Abzählbarkeitsaxiom erfüllt.
Beweis:
B ist offensichtlich abzählbar. Zeige, dass B Basis von (X, d) ist, d.h. für alle
U ∈T
{
}
U=
B(a, k1 ) ∈ B : B(a, k1 ) ⊆ U .
∪
45
C | Topologische Räume
„⊇“ ist klar, zeige also „⊆“: Sei dazu x ∈ U beliebig und k ∈ N≥1 mit
B(x, k2 ) ⊆ U . Da A dicht ist, existiert a ∈ A ∩ B(x, k1 ), also
x ∈ B(a, k1 ) ⊆ B(x, k2 ) ⊆ U,
}
{
und damit x ∈ ∪ B(a, k1 ) ∈ B : B(a, k1 ) ⊆ U .
□
Beispiel C4.15
Qn liegt dicht in Rn , also besitzt Rn nach C4.14 die abzählbare Basis
{
}
B = B(a, k1 ) : a ∈ Qn , k ∈ N≥1
und erfüllt das zweite Abzählbarkeitsaxiom.
Satz C4.16
Sei Ω eine Menge und 1 ≤ p ≤ ∞. Dann ist ℓp (Ω) genau dann separabel, wenn
Ω abzählbar ist.
Insbesondere sind Rn = ℓ2 ({1, . . . , n}), sowie ℓ2 (N) und ℓ2 (Z) separabel und
erfüllen das zweite Abzählbarkeitsaxiom.
C5. Teilräume und Quotientenräume
Seien f : X → Y und Vi ⊆ X, i ∈ I, dann gilt
f −1 (Y \ V ) = X \ f −1 (V )
(
)
f −1
Vi =
f −1 (Vi )
∩
∩
(
)
∪V = ∪f
i∈I
f
−1
i∈I
i
i∈I
−1
(Vi )
i∈I
(siehe auch Blatt 1, Übungsaufgabe V 1.1).
Definition C5.1
f
g
Seien X → Y → Z Abbildungen.
(1) Zurückziehen (pullback): Jede Topologie TZ auf Z induziert eine Topologie
g ∗ TZ auf Y durch
{
}
g ∗ TZ := g −1 (W ) : W ∈ TZ .
Diese heißt initiale Topologie bezüglich g und ist per definitionem genau
die gröbste Topologie, für die g stetig ist.
46
Teilräume und Quotientenräume | C5
(2) Vorschieben (push forward): Jede Topologie TX auf X induziert eine Topologie f∗ TX auf Y durch
{
}
f∗ TX = V ⊆ Y : f −1 (V ) ∈ TX .
Diese heißt finale Topologie bezüglich f und ist per definitionem genau die
feinste Topologige auf Y , für die f stetig ist.
Beispiel C5.2
Sei f : X → Y konstant und TX , TY Topologien auf X, bzw. Y . Dann gilt
• f ∗ TY = {∅, X} ist die indiskrete Topologie auf X,
• f∗ TX = P(Y ) ist die diskrete Topologie auf Y .
Beispiel C5.3
Sei n ≥ m. Betrachte die Einbettung s und die Projektion p:
s : Rm → Rn , (x1 , . . . , xm ) 7→ (x1 , . . . , xm , 0, . . . , 0),
p : Rn → Rm , (x1 , . . . , xn ) 7→ (x1 , . . . , xm ).
Dann ist s∗ TRn = TRm und p∗ TRn = TRm .
C5.1. Teilraumtopologie
Definition C5.4
Sei (X, TX ) ein topologischer Raum, A ⊆ X und ιA : A → X, a 7→ a die
Inklusion von A in X. Die initiale Topologie bezüglich ιA auf X
TA := {A ∩ U : U ∈ TX }
∗
= {ι−1
A (U ) : U ∈ TX } = ιA TX
nennen wir Teilraumtopologie auf A in X und (A, TA ) einen Teilraum von
(X, TX ).
Beispiel C5.5
• Die Teilraumtopologie von R in C ist die übliche Topologie auf R.
• Ist (X, d) ein metrischer Raum, A ⊆ X und dA = d|A×A . Dann gilt
(A, TA ) = (A, TdA ).
• Die Teilraumtopologie TA einer diskreten Menge A ⊆ X bildet die diskrete
Topologie auf A.
Konvention C5.6
Im Folgenden bezeichne für eine Teilmenge A ⊆ X soweit nicht anders festgelegt mit TA die Teilraumtopologie auf A in X und mit ιA die Inklusion von A
in X.
47
C | Topologische Räume
Wir sagen außerdem z.B. für eine Menge U ⊆ X: „U ist offen in A“, statt „A∩U
ist offen bezüglich (A, TA )“.
Bemerkung C5.7
Sei A ⊆ X. Eine offene Menge O ⊆ A liegt auch in X, ist aber im Allgemeinen
nicht offen in X.
So ist z.B. ]0, 1[ offen in R, aber nicht offen in C.
Der folgende Satz zeigt, dass sich die Teilraumtopologie auch anderweitig charakterisieren lässt.
Satz C5.8 (Universelle Abbildungseigenschaft)
Sei (X, TX ) ein topologischer Raum und A ⊆ X. Für eine Topologie T auf A
sind folgende Aussagen äquivalent:
(1) T ist die Teilraumtopologie auf A in X, d.h. T ist die gröbste Topologie
auf A, für die ιA : (A, T ) → (X, TX ) stetig ist.
(2) Für jeden topologischen Raum (Y, TY ) ist eine Funktion f : (Y, TY ) →
(A, T ) genau dann stetig, wenn g := ιA ◦ f : (Y, TY ) → (X, TX ) stetig
ist.
Y
f
A
g
ιA
X
Beweis:
„ =⇒ “: Sei T = ι∗A TX die Teilraumtopologie von A in X. f : Y → A ist
stetig genau dann, wenn
TY ⊇ {f −1 (U ) : U ∈ T } = f ∗ TA = f ∗ (ι∗A TX )
{
}
= f −1 (ι−1
(U
))
:
U
∈
T
X
A
= (ιA ◦ f )∗ TX ,
also genau dann, wenn (ιA ◦ f ) : Y → X stetig ist.
□
C5.2. Einbettungen
Definition C5.9
Seien (X, TX ) und (Y, TY ) topologische Räume. Eine Abbildung f : (X, TX ) →
(Y, TY ) heißt Einbettung, wenn f ein Homöomorphismus von X auf das Bild
f (X) ⊆ Y induziert.
48
Teilräume und Quotientenräume | C5
Beispiel C5.10
R kann in C eingebettet werden.
05.11.2013
Beispiel C5.11
Rm
Rn , (x1 , . . . , xn ) 7→ (x1 , . . . , xm , 0, . . . , 0) ist eine Einbettung.
p : [0, 1[→ C, p(t) = e2πit ist stetig und injektiv, aber keine Einbettung.
C5.3. Überdeckungen
Definition C5.12
Ein System von Teilmengen {Xi }i∈I , Xi ⊆ X oder eine Überdeckung X =
∪i∈I Xi heißt
• punktweise endlich, wenn für jeden Punkt x ∈ X die Menge Ix := {i ∈ I :
x ∈ Xi } endlich ist,
• lokal-endlich, wenn jeder Punkt x ∈ X eine Umgebung U in X besitzt,
sodass die Indexmenge IU := {i ∈ I : Xi ∩ U ̸= ∅} endlich ist.
Beispiel C5.13
• Die Überdeckung
R=
∪ ] − n, n[
n∈N
ist weder punktweise, noch lokal endlich.
• Die Überdeckung
R=
∪ {x}
x∈R
ist punktweise, aber nicht lokal endlich.
• Die Überdeckung
R=
∪ ]n − 1, n + 1[
n∈Z
ist sowohl punktweise, als auch lokal endlich.
Satz C5.14
Sei X = ∪i∈I Xi eine offene Überdeckung, oder eine lokal endliche abgeschlossene Überdeckung.
Eine Teilmenge V ⊆ X ist genau dann offen (abgeschlossen), wenn V ∩ Xi in
jedem Teilraum Xi offen (bzw. abgeschlossen) ist.
Beweis:
Sei Vi := V ∩ Xi , es gilt dann V = ∪i∈I Vi . Seien alle Xi offen. Da Vi in Xi
offen ist, existiert Ṽi in X offen mit Vi = Ṽi ∩ X. Da Xi in X offen ist, ist
49
C | Topologische Räume
auch Vi offen in X. Damit ist auch V = ∪i∈I Vi offen in X.
Abgeschlossenheit genauso durch Komplementbildung. Für lokal-endliche
abgeschlossene Überdeckungen analog (Übung).
□
C5.4. Verklebung stetiger Abbildungen
Betrachte f : R → R definiert durch
{
f (x) =
1 x∈Q
.
0 x∈R\Q
f ist unstetig, obwohl aus zwei stetigen Funktionen verklebt. Dagegen ist die Funktion f : Q → Q mit
{
0 x2 > 2
f (x) =
.
1 x2 < 2
stetig. h : R → R mit
{
0 x<0
h(x) =
1 x≥0
ist unstetig. k : R → R mit
{√
3
x
x≥0
k(x) =
√
− 3 −x x ≤ 0
ist stetig.
Satz C5.15
Sei (X, T ) ein topologischer Raum, X = ∪i∈I Xi und fi : Xi → Y stetig mit
fi |Xi ∩Xj = fj |Xi ∩Xj für alle i, j ∈ I.
Dann ist f =
i ∈ I.
∪i∈I fi : X → Y
die einzige Abbildung mit f |Xi = fi für alle
Ist die Überdeckung (Xi )i∈I offen oder lokal-endlich abgeschlossen, so ist f
stetig.
Beweis:
Sei V ⊆ Y offen. Da fi : Xi → Y stetig, ist fi−1 (V ) ⊆ Xi offen in Xi . Damit
ist U = f −1 (V ) offen in X, denn U ∩ Xi = fi−1 (V ) ist offen in jedem Xi .□
50
Teilräume und Quotientenräume | C5
C5.5. Quotiententopologie
Definition C5.16
Sei (X, T ) ein topologischer Raum und R ⊆ X × X eine Äquivalenzrelation
auf X. Sei Q := X/R die Quotientenmenge und q : X → Q die Quotientenabbildung. Auf Q definieren wir die Quotiententopologie TQ als
{
}
TQ := U ⊆ Q : q −1 (U ) ⊆ T = q∗ T .
Wir nennen dann (Q, TQ ) Quotientenraum von (X, T ) bezüglich R.
Beispiel C5.17
Betrachte X = [−1, 1]2 ⊆ R2 mit f : [−1, 1]2 → R3 definiert durch
3 cos(πs)
f (s, t) = 3 sin(πs) .
t
f bildet X auf eine Zylinderoberfläche im R3 ab. Definiere jetzt g : [−1, 1]2 →
R3 mit
(3 + t sin( πs
2 )) cos(πs)
g(s, t) = (3 + t sin( πs
2 )) sin(πs)
t cos( πs
)
2
Dies verklebt linke und rechte Seite von X gegenläufig zu einem Möbiusband
im R3 .
Satz C5.18 (Universelle Abbildungseigenschaft)
Sei (X, TX ) ein topologischer Raum, R eine Äquivalenzrelation mit Quotientenraum Q := X/R und Quotientenabbildung q : X → Q. Für eine Topologie
T auf Q sind folgende Aussagen äquivalent:
(1) T ist die Quotiententopologie auf Q, d.h. T ist die feinste Topologie auf
Q, für die q : (X, TX ) → (Q, T ) stetig ist.
(2) Für jeden topologischen Raum (Y, TY ) ist g : (Q, TQ ) → (Y, Ty ) genau
dann stetig, wenn f = g ◦ q : X → Y stetig ist.
Definition C5.19
Eine Abbildung f : (X, TX ) → (Y, Ty ) heißt Identifizierung, wenn sie bezüglich
der Äquivalenzrelation
{
}
Rf = (x, x′ ) ∈ X × X : f (x) = f (x′ )
einen Homöomorphismus auf dem Quotientenraum X/Rf nach Y induziert.
Bemerkung
Jede Identifizierung muss surjektiv sein.
51
C | Topologische Räume
Beispiel C5.20
Die Abbildung p : Rn → Rm , (x1 , . . . , xn ) 7→ (x1 , . . . , xm ) ist eine Identifizierung.
Beispiel C5.21
p : [0, 1[→ S1 , p(t) = e2πit ist stetig und surjektiv, sogar bijektiv, aber keine
Identifizierung.
Satz C5.22 (Kanonische Faktorisierung)
Jede stetig Abbildung f : X → Y faktorisiert gemäß f = ι ◦ f ◦ q in die (surjektive) Quotientenabbildung q : X
X/Rf , die induzierte stetige Bijektion
f : X/Rf → f (X) und die Inklusion ι : f (X)
y.
X
f
q
X/Rf
Y
ι
f
f (X)
Beispiel C5.23 (Universelle Überlagerung der Kreislinie)
Betrachte auf S1 = {(x, y) ∈ R2 : x2 + y 2 = 1} die Abbildung p : R → S1 ,
definiert durch
(
)
p(t) = e2πit = cos(2πt), sin(2πt) .
Es gilt p(t) = p(t′ ) ⇐⇒ t − t′ ∈ Z.
p ist eine Identifizierung, induziert also einen Homöomorphismus p : R/Z →
S1 .
Beweis:
Es gibt zwei Arten, dies zu beweisen.
Implizite Methode
R/Z = q(R) = q([0, 1]) ist kompakt, S1 ist hausdorffsch, also ist jede stetige Bijektion p : R/Z → S1 ein Homöomorphismus (Kanonische Faktorisierung und abgeschlossene Menge wird auf eine abgeschlossene Menge
abgebildet).
Explizite Methode
Für
52
U1 = {(x, y) ∈ S1 : x > 0},
V1 =] − 14 , 14 [,
U2 = {(x, y) ∈ S1 : y > 0},
V2 =]0, 12 [,
U3 = {(x, y) ∈ S1 : x < 0},
V3 =] 14 , 34 [,
U4 = {(x, y) ∈ S1 : y < 0},
U5 = U1 ,
V4 =] 12 , 1[,
V5 = V1 + 1
Summen und Produkte topologischer Räume | C6
konstruieren wir sk : S1 ⊇ Uk → Vk ⊆ R durch
1
2π
1
2π
1
2π
1
2π
s1 (x, y) =
s2 (x, y) =
s3 (x, y) =
s4 (x, y) =
arctan( xy ),
1
arctan( −x
y ) + 4,
−y
arctan( −x
) + 12 ,
x
arctan( −y
) + 34 ,
s5 (x, y) = s1 (x, y) + 1.
∼
=
−
→
∼
=
sk : Uk
Vk ist ein Homöomorphismus mit Inversen p|Vk : Vk −
→ Uk .
Leider lassen sich die sk : Uk → R nicht verkleben, aber im Quotentenraum geht es.
Wir erhalten sk : Uk → R/Z und diese verkleben wir zu s : S1 → R/Z.
Nach Konstruktion gilt
s ◦ p = IdS1 ,
p ◦ s = IdR/Z .
□
11.11.2013
C6. Summen und Produkte topologischer Räume
C6.1. Summentopologie
Definition C6.1
Seien (X, TX ) und (Y, TY ) topologische Räume mit X ∩ Y = ∅. Auf X ⊔ Y
definieren wir die Summentopologie
{
}
T := U ⊔ V : U ∈ TX , V ∈ TY .
Den Raum (X ⊔ Y, T ) = (X, TX ) ⊔ (Y, TY ) nennen wir Summe oder disjunkte
Vereinigung dieser topologischen Räume.
Definition C6.2
Seien (Xλ , Tλ ) für λ ∈ Λ topologische Räume. Wir schreiben
(
)
Xλ :=
Xλ × {λ} .
⊔
λ∈Λ
∪
λ∈Λ
Hierzu gehören die kanonischen Inklusionen ιλ : Xλ
X, ιλ (x) = (x, λ).
Die Summentopologie auf X := ⊔λ∈Λ Xλ ist gegeben durch
{
}
T :=
Uλ : Uλ ∈ Tλ .
⊔
λ∈Λ
53
C | Topologische Räume
Satz C6.3
Es existieren bijektive Abbildungen
(
)
∼ ∏
C
Xλ , Y −
→
C(Xλ , Y ),
⊔
λ∈Λ
f 7→ (f ◦ ιλ )λ∈Λ ;
λ∈Λ
( ∏
)
∼ ∏
C Y,
Xλ −
→
C(Y, Xλ ),
λ∈Λ
f 7→ (pλ ◦ f )λ∈Λ .
λ∈Λ
Beispielsweise entspricht f : R → Rn einem Tupel (f1 , . . . , fn ) mit fk : R →
R.
C6.2. Produkttopologie
Betrachtet man Produkte von topologischen Räumen, so ist folgende Definition
anschaulich naheliegend.
Definition C6.4
Seien (X, TX ), (Y, TY ) topologische Räume. Eine Menge W ⊆ X × Y heißt
offen in der Produkttopologie, wenn es zu jedem (x, y) ∈ W offene Umgebungen
x ∈ U ∈ TX und y ∈ V ∈ TY gibt, sodass U × V ⊆ W .
Bemerkung
Demnach wäre
{
}
B(x,y) := U × V : x ∈ U ∈ TX , y ∈ V ∈ TY ,
eine Umgebungsbasis der Produkttopologie. Außerdem definiert
{
B := U × V : U ∈ TX , V ∈ TY }
eine Basis. Wählt man hier stattdessen U, V aus einer Basis von TX , bzw. TY ,
so erhält man ebenfalls eine Basis der Produkttopologie.
Beispiel C6.5
Die Produkttopologie auf R × R = R2 ist die euklidische. Die Produkttopologie
auf Rm × Rn = Rm+n ist ebenfalls die euklidische.
Definition C6.6
Seien (Xλ , Tλ ) topologische Räume (λ ∈ Λ). Wir definieren das Produkt
X :=
∏
{
}
Xλ := (xλ )λ∈Λ : xλ ∈ Xλ .
λ∈Λ
Hierzu gehören die kanonischen Projektionen pλ : X → Xλ : pλ ((xµ )µ∈Λ ) =
xλ . Eine Menge W ⊆ X heißt offen in der Produkttopologie, wenn sie zu jedem
54
Summen und Produkte topologischer Räume | C6
Punkt x = (xλ )λ∈Λ eine Menge der Form
−1
p−1
λ1 (Uλ1 ) ∩ · · · ∩ pλn (Uλn )
enthält, wobei λ1 , . . . , λn ∈ Λ, Uλk ∈ Tλk .
Bemerkung
Wir wollen, dass jede Projektion pλ : X → Xλ stetig ist, d.h. zu Uλ ∈ Tλ
soll p−1
λ (U ) ∈ T .
Bemerkung
Wird Tλ erzeugt von Eλ , dann wird T erzeugt von
E :=
∪ p (E )
∗
λ
λ
λ∈Λ
{
=
}
(
)
.
Uµ ∃λ ∈ Λ : Uλ ∈ Eλ ∧ ∀µ ̸= λ : Uµ = Xµ
µ∈Λ
∏
Hat Tλ als Basis Bλ , dann hat T als Basis
∏
∃λ1 , . . . , λn ∈ Λ :
(
)
B=
U µ∈Λ µ Uλi ∈ Bλi ∧ ∀µ ̸∈ {λ1 , . . . , λn } : Uµ = Xµ
Beispiel C6.7
• Für Λ = {1, 2} so erhalten wir X1 × X2 wie oben.
• Auf Rn = R × · · · × R erhalten wir die euklidische Topologie.
∏
• Auf RR = x∈R R ist die Produkttopologie die Topologie der punktweisen
Konvergenz.
Metrisierbarkeit von Produkträumen
Satz C6.8
∏
Sei (X, T ) = λ∈Λ (Xλ , Tλ ), wobei jedes Xλ mindestens zwei Punkte enthält.
Dann sind folgende Aussagen äquivalent:
1) jeder Raum (Xλ , Tλ ) ist metrisierbar und Λ ist abzählbar,
2) das Produkt (X, T ) ist metrisierbar.
Beweis:
„ =⇒ “: d : X × X → R≥0 definiert eine Metrik auf (X, T ) durch
d(x, y) =
mit ai > 0,
∑
ai d∗i (xi , yi )
i∈I
∑
i∈I
ai < ∞, siehe auch Übungsaufgabe S 4.1, Blatt 3.
55
C | Topologische Räume
„ ⇐= “: Wenn (X, T ) metrisierbar ist, dann sind auch (Xλ , Tλ ) metrisierbar
(betrachte Xλ dazu als Teilmenge von X, jeweils ergänzt durch aµ , µ ̸=
λ und nehme die Metrik von X eingeschränkt auf diese Teilmenge).
Angenommen I ist überabzählbar, dann liefert z.B. RR einen nicht metrisierbaren Raum (siehe C2.15), ein Widerspruch.
□
Beispiel C6.9
{0, 1}N ist homöomorph zur Cantor-Menge C ⊆ [0, 1].
C7. Filter
C7.1. Von Folgen zu Filtern
Konvergenz von (xn )n∈N → a bedeutet, dass jede offene Umgebung U ∈ Ua (T )
ein Endstück Em = {xn : n ≥ m} enthält. Das System E = {Em : m ∈ N}
erfreut sich folgender Eigenschaften
(FB1) E ̸= ∅ und ∅ ̸∈ E,
(FB2) U, V ∈ E =⇒ ∃W ∈ E : W ⊆ U ∩ V .
Aus E enthalten wir
{
}
F := ⟨E⟩X := F ⊆ X : E ⊆ F für ein E ∈ E .
Für F gilt
(F1) X ∈ F und ∅ ̸∈ F,
(F2) U, V ∈ F =⇒ U ∩ V ∈ F,
(F3) U ∈ F , U ⊆ V ⊆ X =⇒ V ∈ F.
Definition C7.1
Ein Mengensystem F ⊆ P(X) heißt Filter, wenn (F1-3) gilt.
Ein Mengensystem E ⊆ P(X) heißt Filterbasis, wenn (FB1-2) gilt.
Beispiel C7.2
Für a ∈ X in einem topologischen Raum (X, T ) ist Ua (X, T ) ein Filter, ein
sogenannter Umgebungsfilter.
Jede Umgebungsbasis Bx ist eine Filterbasis.
Bemerkung C7.3
Konvergenz (xn )n∈N → a bedeutet F ⊇ Ua .
56
Filter | C7
Definition C7.4
Sei (X, T ) ein topologischer Raum, F ein Filter auf X, a ∈ X. Der Filter F
konvergiert gegen a in (X, T ), geschrieben F → a, wenn F ⊇ Ua .
Beispiel C7.5
Betrachte
{
}
F = F ⊆ R : [0, ε] ⊆ F für ein ε > 0 .
F konvergiert gegen 0, denn F ⊇ U0 . Dagegen konvergiert
{
}
F ′ = F ⊆ R : [0, 1 + ε] ⊆ F für ein ε > 0 .
gegen kein a ∈ R.
Bemerkung C7.6
Filter auf X sind die echten Ideale in der Mengenalgebra (P(X), ∩, ∪).
C7.2. Bildfilter
Definition C7.7
Ist F ein Filter auf X und f : X → Y eine Abbildung, dann ist
{
}
f (F) := V ⊆ Y : ∃U ∈ F : f (U ) ⊆ V
ein Filter auf Y , genannt Bildfilter.
Satz C7.8
Sei f : (X, TX ) → (X, TY ) eine Abbildung. Dann sind folgende Aussagen
äquivalent:
1) f ist stetig in a ∈ X,
2) aus F → a folgt f (F) → f (a),
3) für Ua gilt f (Ua ) → f (a).
Beweis:
(1) =⇒ (2): Sei f stetig in a, d.h. für V ∈ Uf (a) gilt f −1 (V ) ∈ Ua . Wegen
F ⊇ Ua folgt U := f −1 (V ) ∈ F .
Wegen V ⊇ f (U ) gilt V ∈ f (F), also f (F) ⊇ Uf (a) .
(2) =⇒ (3): trivial.
12.11.2013
(3) =⇒ (1): Sei V ∈ Uf (a) . Wegen f (Ua ) → f (a) gilt f (Ua ) ⊇ Uf (a) ∋ V ,
also existiert ein U ∈ Ua mit f (U ) ⊆ V , also ist f −1 (V ) Umgebung
von a.
□
57
C | Topologische Räume
C7.3. Produkträume
Ähnlich wie im Rn Folgen genau dann konvergieren, wenn ihre Koordinatenfolgen konvergieren, lässt sich eine analoge Aussage für Filter auf Produkträumen
zeigen.
Satz C7.9
∏
Ein Filter F auf X =
i∈I Xi konvergiert genau dann gegen x = (xi )i∈I ,
wenn der Bildfilter jeder Projektion pi (F) auf Xi gegen xi konvergiert.
Beweis:
„ =⇒ “: pi ist stetig und die Aussage folgt mit vorigem Satz.
„ ⇐= “: Es gelten pi (F) ⊇ Uxi für jedes i ∈ I. Nach Definition der Produkt-
topologie ist
Bx =
{
∩p
−1
i (Ui )
: J ⊆ I endlich, Ui ∈ Uxi
}
i∈J
eine Umgebungsbasis von x. Wegen pi (F) ⊇ Uxi ∋ Ui folgt p−1
i (Ui ) ∈
F. Nach (F2) auch ∩i∈J p−1
□
i (Ui ) ∈ F, also F ⊇ Bx , also F ⊇ Ux .
C7.4. Ultrafilter
Definition C7.10 (Ultrafilter)
Ein Filter F auf X heißt Ultrafilter (oder maximaler Filter), wenn er sich nicht
weiter verfeinern lässt, d.h. für jeden Filter F ′ ⊇ F auf X gilt F ′ = F.
Beispiel C7.11
Zu a ∈ X ist
⟨a⟩ := {U ⊆ X : a ∈ U }
ein Ultrafilter.
Beweis:
Sei F ′ ⊇ F. Angenommen ∃F ∈ F ′ , aber F ̸∈ F . Dann ist a ̸∈ F . Wegen
{a} ∈ F ⊆ F ′ und (F2) enthält F ′ dann F ∩ {a} = ∅, ein Widerspruch zu
(F1).
□
Beispiel C7.12
Für A ⊆ X ist
⟨A⟩ := {U ⊆ X : A ⊆ U }
ein Filter, aber maximal nur für A = {a}, denn sonst gilt für jedes a ∈ A
⟨a⟩ ⊋ ⟨A⟩.
58
Filter | C7
Satz C7.13
Ein Filter F auf X ist maximal genau dann, wenn er für jede Menge A ⊆ X
entweder A oder X \ A enthält.
Beweis:
„ ⇐= “: Sei F ′ ⊋ F. Dann existiert A ∈ F ′ mit A ̸∈ F. Nach Voraussetzung
ist (X \ A) ∈ F ⊆ F ′ . Wegen (F2) enthält F ′ auch A ∩ (X \ A) = ∅,
ein Widerspruch zu (F1).
„ =⇒ “: Sei F ein maximaler Filter und A ⊆ X. Wenn A ∩ U = ∅ für ein
U ∈ F , dann U ⊆ (U \ A) ∈ F . Andernfalls ist A ∩ U ̸= ∅ für alle
U ∈ F und wir erhalten einen Filter
{
}
F ′ = ⟨F, ⟨A⟩⟩ = U ∩ V : U ∈ F , A ⊆ V ⊆ X .
Es gilt F ′ ⊇ F und F ′ ∋ A. Da F maximal, folgt A ∈ F ′ = F.
□
Satz C7.14
Jeder Filter auf X ist in einem maximalen Filter enthalten.
Beweis:
Sei S die Menge aller Filter auf X, die F enthalten. Diese ist geordnet durch
Inklusion. Nach dem Lemma von Zorn hat jede geordnete Menge S, in der
jede Kette eine obere Schranke besitzt, ein maximales Element.
□
59
D. Kompaktheit
D1. Grundlagen
Definition D1.1 (Kompakter topologischer Raum)
Ein topologischer Raum (X, T ) heißt kompakt, wenn zu X = ∪i∈I Ui mit
n
Ui ∈ T endlich viele Indizes i1 , . . . , in ∈ I existieren mit X = ∪k=1 Uik .
Beispiel D1.2
• Jeder Raum mit indiskreter Topologie ist kompakt.
• Rn = ∪n∈N B(0, n) enthält keine endliche Teilüberdeckung, Rn ist also
mit euklidischer Topologie nicht kompakt.
• Für einen diskreten Raum (X, T ) gilt:
(X, T ) kompakt ⇐⇒ X endlich.
Definition D1.3 (Kompakte Teilmenge/Kompakter Teilraum)
(1) A ⊆ X heißt kompakt in (X, TX ), wenn jede offene Überdeckung von A,
∪i∈I Ui ⊇ A, mit Ui ∈ TX eine endliche Teilüberdeckung enthält.
(2) A ⊆ X heißt relativ kompakt in (X, TX ), wenn A in (X, TX ) kompakt ist.
Bemerkung D1.4
Sei (A, TA ) ein Teilraum von (X, T ). K ⊆ A ist kompakt in (X, T ) genau
dann, wenn K kompakt in (A, TA ) ist.
Insbesondere ist der Teilraum (A, TA ) genau dann kompakt (gemäß D1.1), wenn
A ⊆ X in (X, TX ) kompakt ist (gemäß D1.3).
Beweis:
„ =⇒ “: Sei
∪i∈I Ui ⊇ K, Ui ∈ TA eine offene Überdeckung von K in
(A, TA ). Nach Definition des Teilraums existieren Vi ∈ T : Ui = Vi ∩ A
für alle i ∈ I.
∪V
i
i∈I
⊇A∩
∩ A) ⊇ K
∪ V = ∪ (V
| {z }
i
i∈I
i
i∈I
=Ui
ist eine offene Überdeckung von K in (X, TX ) mit endlicher Teilüber61
D | Kompaktheit
deckung ∪k=1 Vik ⊇ K. Also ist
n
n
n
∪
k=1
∪
Uik = A ∩
Vik ⊇ A ∩ K = K
|{z}
k=1
=Vik ∩A
eine endliche Teilüberdeckung von ∪i∈I Ui ⊇ K.
∪i∈I Ui ⊇ K, Ui ∈ T eine offene Überdeckung von K in
(X, T ) und Vi := A ∩ Ui ∈ TA für i ∈ I.
„ ⇐= “: Sei
∪
i∈I
∪
Vi = A ∩
Ui ⊇ A ∩ K = K
|{z}
i∈I
=A∩Ui
ist eine offene Überdeckung von K in (A, TA ) mit endlicher Teilüberden
ckung ∪k=1 Vik ⊇ K. Also ist
n
∪U
ik
n
⊇A∩
k=1
∪U
ik
n
=
k=1
∪
=A∩Uik
z}|{
Vik ⊇ K
k=1
eine endliche Teilüberdeckung von ∪i∈I Ui ⊇ K.
□
Beispiel D1.5
• Jede endliche Menge A ⊆ X ist kompakt.
• Z ⊆ R ist nicht kompakt, ebensowenig Q ⊆ R.
• ]0, 1] ⊆ R ist nicht kompakt, aber relativ kompakt in R, denn ]0, 1] = [0, 1]
(Abschluss in R).
Satz D1.6 (Kompakte Ordnungstopologie, Charakterisierung)
Sei (X, <) ein geordnete Menge. Genau dann ist jedes Intervall [a, b] in X kompakt bezüglich der Ordnungstopologie, wenn (X, <) vollständig geordnet ist
(d.h. (X, <) erfüllt das Supremums-Axiom).
Beispiel D1.7
• (R, <) ist vollständig geordnet und jedes Intervall [a, b] ⊆ R ist kompakt.
• (Q, <) ist nicht vollständig geordnet und jedes Intervall [a, b]Q mit a < b
ist nicht kompakt.
Sei ξ ∈ [0, 1] \ Q, z.B. ξ =
√
2
2 .
Dann bilden
Sn = [0, ξ − n1 [Q ,
eine offene Überdeckung [0, 1]Q =
Teilüberdeckung.
62
Tn =]ξ + n1 , 1]Q
∪n∈N Sn ∪ ∪n∈N Tn ohne endliche
Grundlagen | D1
Lemma D1.8
Sei (X, T ) hausdorffsch, A ⊆ X kompakt und b ∈ X \ A. Dann existieren
offene Umgebungen U von A in X und V von b in X mit U ∩ V = ∅.
Beweis:
Zu a ∈ A existieren a ∈ Ua ∈ T und b ∈ Va ∈ T mit Ua ∩ Va = ∅. Da A
kompakt, gilt A ⊆ Ua1 ∪ · · · ∪ Uan =: U und V := Va1 ∩ · · · ∩ Va1 ∋ b. □
Satz D1.9
Sind A, B kompakt mit A ∩ B = ∅ in einem Hausdorff-Raum (X, T ), dann
existieren A ⊆ U ∈ T und B ⊆ V ∈ T mit U ∩ V = ∅.
Beweis:
□
Analog zu oben.
18.11.2013
Satz D1.10
In jedem kompakten Raum (X, T ) ist jede abgeschlossene Teilmenge A ⊆ X
kompakt.
Beweis:
Sei A ⊆ ∪i∈I Ui mit Ui ∈ T , dann ist
X = (X \ A) ∪
∪U
i
= (X \ A) ∪ Ui1 ∪ · · · ∪ Uin ,
i∈I
also A ⊆ Ui1 ∪ · · · ∪ Uin .
□
Satz D1.11
In einem Hausdorff-Raum (X, T ) ist jede kompakte Teilmenge A ⊆ X abgeschlossen.
Beweis:
Nach D1.8 findet sich zu jedem b ∈ X \ A eine offene Umgebung in X \ A.□
D1.1. Kompaktheit unter Abbildungen
Satz D1.12
Ist X kompakt, f : X → Y stetig, dann ist f (X) ⊆ Y kompakt.
Beweis:
Sei f (X) ⊆ ∪i∈I Vi mit Vi ∈ Ty . Da f stetig ist
Ui = f −1 (Vi ) ∈ TX
und X = ∪i∈I Ui = ∪k=1 Uik Aus f (Ui ) ⊆ Vi folgt
n
f (X) ⊆ f (Ui1 ) ∪ · · · ∪ f (Uin ) ⊆ Vi1 ∪ · · · ∪ Vin .
□
63
D | Kompaktheit
Satz D1.13
Ist X kompakt, f : X → R stetig, so existieren a, b ∈ X mit
f (a) ≤ f (x) ≤ f (b)
für alle x ∈ X.
Beweis:
□
Leicht nachvollziehbar.
Satz D1.14
Sei X kompakt, Y hausdorffsch. Dann ist jede stetige Abbildung f : X → Y
abgeschlossen und induziert in der kanonischen Faktorisierung ein Homöomorphismus f .
f
X
q
Y
ι
X/Rf
f
f (X)
Beweis:
Sei A ⊆ X abgeschlossen. Da X kompakt, ist auch A kompakt und damit
wegen Stetigkeit von f auch f (A). Da Y hausdorffsch, ist also auch f (A)
abgeschlossen.
□
Beispiel D1.15
∼
=
Wir wissen R/Z −
→ S 1 . Die Abbildung p : R → S1 mit p(t) = e2πit ist
stetig, surjektiv und p(x) = p(x′ ) ⇐⇒ x − x′ ∈ Z. In der kanonischen
Faktorisierung erhalten wir
R
p
S1
.
q
R/Z
p
S1
Da R/Z = q([0, 1]) kompakt ist und S1 ⊆ R2 hausdorffsch, ist p ein Homöomorphismus.
Beispiel D1.16
Dn /Sn−1 ∼
= Sn
D1.2. Summen
Satz D1.17
Sei (Xλ )λ∈Λ eine Familie topologischer Räume mit Xλ ̸= ∅. Die Summe X =
⊔λ∈Λ Xλ ist genau dann kompakt, wenn alle Xλ kompakt sind und Λ endlich
64
Grundlagen | D1
ist.
Beweis:
„ ⇐= “: klar
∪λ∈Λ Xλ offene Überdeckung ohne echte Teilüberdeckung. Also ist Xλ abgeschlossen in X, also kompakt.
□
„ =⇒ “: Angenommen Xλ offen, dann ist X =
D1.3. Charakterisierung durch Filter
Satz D1.18
Ein topologischer Raum (X, T ) ist genau dann kompakt, wenn jeder Ultrafilter
F auf X konvergiert, also ein x ∈ X existiert mit F ⊇ Ux .
Beweis:
„ =⇒ “: Sei X kompakt und F ein Ultrafilter. Angenommen F konvergiert
nicht, d.h. jeder Punkt x ∈ X hat eine offene Umgebung x ∈ Ux ∈ T
mit Ux ̸∈ F . Da X kompakt, existiert eine Überdeckung X = Ux1 ∪· · ·∪
Uxn mit Ux1 , . . . , Uxn ̸∈ F. Da F ein Ultrafilter ist, gilt X \Ux1 , . . . , X \
Uxn ∈ F . Nach (F2) ist
(X \ Ux1 ) ∩ . . . ∩ (X \ Uxn ) = X \ (Ux1 ∪ . . . ∪ Uxn ) = ∅ ∈ F,
ein Widerspruch zu (F1).
„ ⇐= “: Angenommen X ist nicht kompakt, d.h. es existiert X =
Ui ∈ T ohne endliche Teilüberdeckung. Dann ist
{
}
E=
X\
∪i∈I Ui ,
∪ U |J ⊆ I endlich
i
i∈J
eine Filterbasis. Diese erzeugt einen Filter und dieser liegt in einem Ultrafilter F auf X. Nach Voraussetzung konvergiert F gegen ein x ∈ X,
d.h. F ⊇ Ux . Wegen X = ∪i∈I Ui existiert j ∈ I mit x ∈ Uj ∈ T , also
Uj ∈ Ux ⊆ F. Andererseits gilt X \ Uj ∈ E ⊆ F. Nach (F2) ist also
Uj ∩ (U \ Uj ) = ∅ ∈ F, ein Widerspruch zu (F1).
□
D1.4. Produkte
Satz D1.19 (Tychonoff, 1930)
Seien (Xi , Ti )i∈I nicht-leere topologische Räume. Der Produktraum (X, T ) =
∏
i∈I (Xi , Ti ) ist kompakt genau dann, wenn jeder Raum (Xi , Ti ) kompakt ist.
65
D | Kompaktheit
Beweis:
„ =⇒ “: pi : X → Xi ist stetig und surjektiv, also ist Xi kompakt.
„ ⇐= “: Sei F ein Ultrafilter auf X. Dann ist pi (F) ein Ultrafilter auf Xi
(Übungsaufgabe). Da Xi kompakt, existiert xi ∈ Xi mit pi (F) → xi .
Dann konvergiert F auf X gegen x = (xi )i∈I .
□
Beispiel D1.20
• {0, 1}N ist kompakt.
• [a1 , b1 ] × · · · × [an , bn ] ⊆ Rn ist kompakt.
∏
•
[ak , bk ] ⊆ RN ist kompakt.
∏ k∈N
R
•
x∈R [ax , bx ] ⊆ R ist kompakt.
Beispiel D1.21 (Hilbert-Würfel)
Der Hilbert-Würfel [0, 1]N ist kompakt und metrisierbar. Ebenso in ℓ2 (N) ist
der Hilbert-Quader
}
{
1
= [0, 1] × [0, 12 ] × [0, 13 ] × · · ·
H = f : N → R| ≤ f (k) ≤ k+1
Es gilt H ∼
= [0, 1]N .
Satz D1.22 (verwandte Kompaktheitsbegriffe)
Für topologische Räume gilt
• Kompaktheit impliziert abzählbare Kompaktheit
• abzählbare Kompaktheit impliziert Kompaktheit unter Voraussetzung des
zweiten Abzählbarkeitsaxioms
• Folgenkompaktheit impliziert abzählbare Kompaktheit
• abzählbare Kompaktheit impliziert Folgenkompaktheit unter Voraussetzung des ersten Abzählbarkeitsaxioms.
• Abzählbare Kompaktheit impliziert Pseudokompaktheit
Beweis:
Wie im metrischen Fall.
□
D2. Lokale Kompaktheit
Definition D2.1
Ein Raum (X, T ) heißt lokal-kompakt, wenn jede Umgebung eines Punktes eine
kompakte Umgebung enthält, d.h.
∀x ∈ X ∀U ∈ Ux ∃K ∈ Ux : K ⊆ U und K kompakt.
66
Lokale Kompaktheit | D2
Beispiel D2.2
• Rn ist lokal-kompakt.
• Kein Punkt x ∈ Q besitzt eine kompakte Umgebung, insbesondere ist also
Q nicht lokal-kompakt.
Satz D2.3
Sei (X, T ) ein Hausdorff-Raum und zu jedem Punkt x ∈ X existiere eine kompakte Umgebung. Dann ist (X, T ) lokal-kompakt.
Beweis:
Sei x ∈ X und K ∈ Ux kompakt. Zu jeder offenen Umgebung U ∈ Ux
müssen wir eine kompakte Umgebung KU ∈ Ux mit KU ⊆ U finden.
Setze
A := K \ U
(A kompakt) und seien V, W offene Umgebungen von x, bzw. A mit V ∩W =
∅ (Hausdorff-Eigenschaft). Setze
KU := K \ W
KU ist abgeschlossen und kompakt und zudem eine Umgebung von x, denn
x ∈ K ∩ V ⊆ K \ W = KU . Weiterhin gilt KU ⊆ U .
□
Korollar D2.4
Jeder kompakte Hausdorff-Raum ist lokal-kompakt.
Beweis:
Der Raum ist kompakte Umgebung eines jeden seiner Punkte, also folgt die
Aussage direkt mit D2.3.
□
Lemma D2.5
Ist (X, T ) lokal-kompakt, so auch jeder offene und jeder abgeschlossene Teilraum.
Beweis:
Für einen Teilraum (O, TO ) mit beliebigem x ∈ O ∈ T und Umgebung
x ∈ U ∈ TO existiert V ∈ T mit U = V ∩ O ∈ T . Also existiert eine
kompakte Teilmenge K ⊆ U , welche auch kompakt in (O, TO ) ist.
□
Satz D2.6
Sei (X, T ) ein topologischer Raum, U ⊆ X offen und A ⊆ X abgeschlossen.
• Ist (X, T ) lokal-kompakt und Y = U ∩ A mit Teilraumtopologie TY , dann
ist Y lokal-kompakt.
• Ist (X, T ) hausdorffsch, so gilt auch die Umkehrung.
67
D | Kompaktheit
• Ist Y ⊆ X lokal-kompakter Teilraum, so existiert eine Zerlegung Y =
U ∩ A mit U, (X \ A) ∈ T .
Definition D2.7
Sei (X, T ) ein topologischer Raum. Eine Menge U ⊆ X heißt K-offen, wenn
für jedes Kompaktum K ⊆ X die Schnittmenge U ∩ K offen in (K, TK ) ist.
Dies definiert die kompakt erzeugte Topologie
{
}
KT := U ⊆ X|U ist K-offen .
Lemma D2.8
Es gilt
T ⊆ KT = K(KT )
und die kompakten Teilräume sind dieselben.
Satz D2.9
Jeder lokal-kompakte Raum (X, T ) ist kompakt erzeugt, d.h. KT = T .
Beweis:
Wir zeigen KT ⊆ T . Sei U ∈ KT , d.h. U ⊆ X mit U ∩ K offen in jedem
Kompaktum K ⊆ X. Wir zeigen U ∈ T . Zu x ∈ U existiert eine kompakte
Umgebung K in X, also U ∩ K offen in K, d.h. es existiert V ∈ T mit
U ∩ K = V ∩ K. Dies ist eine Umgebung von x in X, da V und K solche
sind. Also ist auch U ⊇ V ∩ K ein Umgebung von x ∈ X. Damit ist U offen
in X, also U ∈ T .
□
19.11.2013
Satz D2.10
Jeder metrische Raum ist kompakt erzeugt.
Sogar jeder topologischer Raum mit erstem Abzählbarkeitsaxiom ist kompakt
erzeugt.
Satz D2.11
Ein Hausdorff-Raum ist genau dann kompakt erzeugt, wenn er Quotient eines
lokal-kompakten Raumes ist.
D2.1. Topologische Vektorräume
Definition D2.12
Ein topologischer R-Vektorraum (X, T , +, ·) ist ein R-Vektorraum mit einer
Hausdorff-Topologie T auf X, sodass Addition + : X × X → X und Skalarmultiplikation · : R × X → X stetig sind.
68
Lokale Kompaktheit | D2
Beispiel D2.13
• (Rn , TRn , +, ·),
• Jeder normierte R-Vektorraum (X, | · |),
• Auf R(N) , Cc (R, R), C([0, 1], R) definieren die p-Normen mit 1 ≤ p ≤ ∞
überabzählbar viele Vektorraumtopologien.
• RR mit der Topologie der punktweisen, gleichmäßigen oder kompakten
Konvergenz
Lemma D2.14
(1) Jede Translation τv : X → X : x 7→ x + v ist ein Homöomorphismus.
(2) Jede Streckung µa : X → X : x 7→ ax mit a ∈ R \ {0} ist ein Homöomorphismus.
(3) Jede Umgebung U von 0 ist absorbierend, d.h. X = ∪n∈N nU .
(4) Jede Umgebung U von 0 enthält eine ausgeglichene, offene Umgebung
V ⊆ U , d.h. [−1, 1]V = V .
Beweis:
(3) Für x ∈ X ist f : R → X mit f (a) = ax stetig als Komposition
f :R
R × {x}
R×X
X .
Also ist n−1 x → 0 für n → ∞, d.h. es gibt m ∈ N sodass n−1 x ∈ U
für alle n ≥ m. Somit x ∈ nU für n ≥ m.
(4) Die Skalarmultiplikation mit a, m : R × X → X, m(a, x) = ax ist
stetig (Argument wie oben). Für 0 ∈ U ∈ T ist m−1 (U ) ⊆ R × X
offen. Wegen m(0, 0) = 0 gilt (0, 0) ∈ m−1 (U ). Es existiert ε ∈ R>0
und 0 ∈ W ∈ T sodass ] − ε, ε[×W ⊆ m−1 (U ). Damit ist V =
□
∪0<|a|<ε aW ⊆ U offen und ausgeglichen.
Satz D2.15
Sei (Rn , TRn , +, ·) der euklidische Vektorraum und (X, T , +, ·) ein beliebiger
topologischer R-Vektorraum. Dann gelten folgende Aussagen
1) Jede lineare Abbildung f : Rn → X ist stetig.
2) Ist f injektiv, so ist f auch abgeschlossen.
3) Ist f bijektiv, so auch homöomorph.
Beweis:
(1) Sei e1 , . . . , en ∈ Rn die Standardbasis und vi = f (ei ), i = 1, . . . , n.
Dank R-Linearität gilt
f (a) = a1 v1 + . . . + an vn .
69
D | Kompaktheit
f ist also stetig, denn
∼
=
f : Rn −
→ (R × {v1 }) × · · · × (R × {vn })
(R × X) × · · · × (R × X)
·n
+n
→ X × ··· × X → X
ist als Komposition stetig.
(2) In Rn sei K0 = B(0, 1), Kr = B(0, 2r ) \ B(0, 2r−1 ). Die Familie
(Kr )r∈N von Kreisringen ist kompakt und abgeschlossen und lokalendlich. Die Bilder (f (Kr ))r∈N sind dies ebenfalls:
Da f injektiv ist, folgt aus 0 ̸∈ K1 auch 0 = f (0) ̸∈ f (K1 ), d.h. es
existiert eine Umgebung U von 0 mit U ∩ K1 = ∅. U enthält eine ausgeglichene Umgebung V von 0. Dann ist 2−v V ⊆ V disjunkt von K1 ,
also ist V ∩ 2r K1 = ∅, d.h. V ∩ Kr = ∅ für r ≥ 1. Jeder Punkt x liegt
in einer offenen Menge 2k V , diese schneidet nur endlich viele Kr .
Für A ⊆ Rn abgeschlossen ist A∩Kr kompakt, also f (A∩Kr ) kompakt,
also abgeschlossen. Damit ist f (A) = ∪r∈N f (A ∩ Kr ) abgeschlossen,
da lokal-endliche Vereinigung.
(3) klar
□
Korollar D2.16
Die euklidische Topologie auf Rn ist auf (Rn , +, ·) die einzige Vektorraumtopologie.
Auf jeden endlich-dimensionalen R-Vektorraum existiert genau eine Vektorraumtopologie.
Bemerkung
√
Auf Qn stimmt dies nicht. So ist Q2 ⊆ R2 und Q[ 2] ⊆ R Q-linear isomorph
mit
√
√
f : Q2 → Q[ 2], f (a, b) = a + b 2,
aber die Teilraumtopologien sind verschieden. f ist stetig, aber kein Homöomorphismus:
√ Zu n ∈ N existieren a√n , bn ∈ Z mit (an , bn ) ̸= (0, 0) und
|an + bn 2| < n1 . Damit ist an + bn 2 → 0, aber (an , bn ) ̸→ (0, 0).
Lemma D2.17
Sei B eine Umgebungsbasis von U in X. Für A ⊆ X gilt A = ∩U ∈B A + U
Beweis:
Für x ∈ X ist Bx = {x − U : U ∈ B} eine Umgebungsbasis. Genau dann
gilt x ∈ A, wenn (x − U ) ∩ A ̸= ∅ für alle U ∈ B. Das bedeutet, für jedes
70
Alexandroff-Kompaktifizierung | D3
U ∈ B existiert a ∈ (x − U ) ∩ A, also x ∈ a + U .
□
Satz D2.18
Ein topologischer R-Vektorraum (X, T , +, ·) ist genau dann lokal-kompakt,
wenn dimR X < ∞.
Beweis:
„ ⇐= “: Klar mit vorigem Satz
„ =⇒ “: Es existiert eine offene Umgebung 0 ∈ V ∈ T um 0 mit V kompakt.
Für U ∈ U0 gilt X = ∪n∈N 2n U (absorbierend), also
V ⊆V ⊆
∪2 U
k
k∈N
und damit V ⊆ V ⊆ 2n U für n groß genug, d.h. 2−n V ⊆ U , also ist
{2−n V : n ∈ N} eine Umgebungsbasis von O. Mit V ist auch x + 12 V
offen für jedes x ∈ X, also V ⊆ X = ∪x∈X x + 12 V . Da V kompakt,
ist damit
V = (x1 + 12 V ) + · · · + (xm + 21 V ).
Sei Y = Rx1 + · · · + Rxm . Aus V ⊆ Y + 12 V und 12 Y = Y folgt
1
1
1
1
1
2 V ⊆ Y + 2 V , also V ⊆ Y + 2 V ⊆ Y + Y + 4 V ⊆ Y + 2 V . Per
−n
Induktion gilt V ⊆ Y + 2 V , somit auch
V ⊆
∩ Y +2
−n
V = Y = Y.
n∈N
Es folgt X = ∪n∈N nV ⊆ Y , also ist
dimR X = dimR Y ≤ m < ∞.
□
D3. Alexandroff-Kompaktifizierung
Definition D3.1
Eine Kompaktifizierung eines topologischen Raumes (X, T ) ist ein Paar (Y, κ)
bestehend aus einem kompakten Hausdorff-Raum Y und einer Einbettung κ :
X
Y mit κ(X) = Y .
Beispiel D3.2
• ]0, 1]
[0, 1],
• ] − 1, 1[
•R
[−1, 1],
R = R ∪ {±∞},
71
D | Kompaktheit
• Bn
Dn ,
∼
=
• die stereographische Projektion κ : Rn −
→ Sn \ {p}
Sn .
Satz D3.3 (Alexandroff)
Sei (X, T ) ein topologischer Raum und ∞ ̸∈ X. Auf X̂ := X ∪ {∞} definieren
wir die Alexandroff-Topologie
{
}
T̂ := T ∪ X̂ \ K|K ⊆ X kompakt und abgeschlossen .
Dies ist eine Topologie auf X̂. Der Raum (X̂, T̂ ) ist kompakt und hierin ist
(X, T ) ein offener Teilraum. Die Topologie T̂ ist die feinste mit dieser Eigenschaft.
Genau dann ist (X̂, T̂ ) hausdorffsch, wenn (X, T ) hausdorffsch und lokalkompakt ist.
D4. Die Kompakt-Offen-Topologie
25.11.2013
Die Kompakt-Offen-Topologie wird in den Übungen Blatt 3, Abschnitt 3 behandelt.
D5. Trennungsaxiome und Metrisierbarkeit
Mit „Trennen zweier Mengen A, B“ meinen wir in topologischen Räumen das
Finden von zwei disjunkten (offenen) Umgebungen um A, bzw. B.
Je nach Topologie ist das Trennen unterschiedlicher Mengen unter verschieden
starken Voraussetzungen möglich, oder auch nicht.
Definition D5.1 (Trennungsaxiome)
Für einen topologischen Raum (X, T ) definieren wir folgende Trennungseigenschaften:
(T0 ) Zu a, b ∈ X, a ̸= b hat einer eine Umgebung, die den anderen nicht
enthält.
(T1 ) Zu a, b ∈ X, a ̸= b haben beide jeweils eine Umgebung, die den anderen nicht enthält.
(T2 ) Zu a, b ∈ X, a ̸= b existieren disjunkte Umgebungen (Hausdorff-Eigenschaft).
(T3 ) Zu A ⊆ X abgeschlossen und b ∈ X \ A existieren disjunkte Umgebungen.
72
Trennungsaxiome und Metrisierbarkeit | D5
(T4 ) Zu A, B ⊆ X abgeschlossen und disjunkt existieren disjunkte Umgebungen.
(T5 ) Zu A, B ⊆ X mit A ∩ B = A ∩ B = ∅ existieren disjunkte Umgebungen.
(T2 / ) Zu a, b ∈ X, a ̸= b existiert f : X → [0, 1] stetig mit f (a) = 0, f (b) =
1.
1
2
(T3 / ) Zu A ⊆ X abgeschlossen und b ∈ X \ A existiert f : X → [0, 1] stetig
mit f |A = 0, f (b) = 1.
1
2
(T4 / ) Zu A, B ⊆ X abgeschlossen und disjunkt existiert f : X → [0, 1]
stetig mit f |A = 0, f |B = 1.
1
2
(T5 / ) Zu A, B ⊆ X abgeschlossen und disjunkt existiert f : X → [0, 1]
stetig mit f −1 (0) = A, f −1 (1) = B.
1
2
Bemerkung D5.2
Jeder metrische Raum (X, T ) erfüllt alle Trennungseigenschaften aus D5.1. Beliebige disjunkte Mengen lassen sich in (X, T ) im Allgemeinen jedoch nicht
trennen.
Beweis:
Wähle im Fall von T5 explizit als Umgebungen
{
}
U := x ∈ X|d(x, A) < d(x, B) ⊇ A
{
}
V := x ∈ X|d(x, B) < d(x, A) ⊇ B.
T1 , T2 , T3 und T4 folgen auf ähnliche Weise.
Im Fall von T5 / lässt sich explizit f : X → [0, 1] wählen als
1
2
f (x) :=
d(x,A)
d(x,A)+d(x,B) .
T2 / , T3 / und T4 / folgen wieder auf ähnliche Weise.
1
2
1
2
1
2
Beliebige disjunkte Mengen lassen sich nicht trennen: in R lassen sich Q und
R \ Q beispielsweise nicht trennen.
□
Für die Trennungseigenschaften in topologischen Räumen gelten die Zusammenhänge wie in D.1 dargestellt.
Definition D5.3
Ein topologischer Raum (X, T ) heißt
1) hausdorffsch, wenn T2 erfüllt ist,
2) regulär, wenn T1 und T3 erfüllt sind,
73
D | Kompaktheit
T1
T0
T1
T1
T3
T2
Kompaktheit
X endlich
T1
T2 /
1
T1
T3 /
1
2
T5
T4
Kompaktheit
∨ 2AA
∨ Lindelöf
T4 /
1
2
2
T5 /
1
2
Abbildung D.1.: Zusammenhänge zwischen Trennungseigenschaften
3) vollständig regulär, wenn T1 und T3 / erfüllt sind,
1
2
4) normal, wenn T1 und T4 erfüllt sind,
5) vollständig normal, wenn T1 und T5 erfüllt sind,
6) perfekt normal, wenn T1 und T5 / erfüllt sind.
1
2
Lemma D5.4 (Tychonoff)
2AA und T3 impliziert T4 .
Satz D5.5 (Urysohn)
Sei (X, T ) ein T4 -Raum. Dann gilt T4 / .
1
2
Bemerkung
T4 besagt insbesondere: Zu A ⊆ O mit A abgeschlossen und O offen existiert
U offen mit A ⊆ U ⊆ U ⊆ O.
Beweis:
Sei A, B ⊆ X abgeschlossen, A ∩ B = ∅. Setze A0 = A0 := B, A1 := X \ A.
A1 ist offene Umgebung von A0 . Sei f0 : X → [0, 1] definiert durch f0 |A1 =
0, f0 |A = 1. Nach T4 existiert A 21 ∈ T mit
B = A0 ⊆ A 12 ⊆ A 12 ⊆ A1
Sei f : X → [0, 1], f |A 1 = 0, f |A1 \A 1 = 12 , f |A = 1.
2
Per Induktion erhalten wir A
2
k
2n
∈ T mit
B = A 20n ⊆ A 21n ⊆ A 21n ⊆ · · · ⊆ A 2nn−1 ⊆ A 2nn = X \ A.
2
Wir definieren fn : X → [0, 1] durch f |A 1 = 0,
2n
f
= 2kn
A k+1 \A
2n
74
k
2n
2
Trennungsaxiome und Metrisierbarkeit | D5
und f |A = 1. Für jedes x ∈ X ist fn (x) ∈ [0, 1] monoton wachsend in n. Also
fn (x) → f (x) ∈ [0, 1], fn konvergiert gleichmäßig gegen f : X → [0, 1].
Für n ∈ N wird X überdeckt durch
Un0 = A 21n
Un1 = A 22n \ A 20n
..
.
n
Un2
..
.
=
−1
= A 2nn \ A 2nn−2
2
2
n
Un2 = X \ A 2nn−1 .
2
Auf Unk schwankt fn um höchstens 2−n und f um höchstens 2 · 2−n . Zu
jedem x ∈ X und ε > 0 wählen wir n ∈ N so dass 2−n+1 < ε. Es gilt
x ∈ Unk für ein k. Dann ist
f (Unk ) ⊆]f (x) − ε, f (x) + ε[.
□
Das bedeutet, f ist stetig.
Lemma D5.6
Sei A ⊆ X abgeschlossen und φ : A → [−s, s] stetig. Dann existiert Φ : X →
[−s, s] stetig mit
|φ(a) − Φ(a)| ≤ 23 s
für alle a ∈ A.
Beweis:
Setze M := φ−1 ([−s, − 3s ]), N := φ−1 ([ 3s , s]). M, N sind ebgeschlossen.
Nach Urysohn existiert Φ : X → [− 3s , 3s ] mit Φ|M = − 3s , Φ|N = 3s .
□
Satz D5.7 (Tietze)
Sei (X, T ) ein T4 -Raum. Ist A ⊆ X abgeschlossen und f : A → [a, b] stetig.
Dann existiert F : X → [a, b] stetig mit F |A = f .
Beweis:
Sei o.B.d.A. [a, b] = [−1, 1]. Zu f : A → [−1, 1] existiert Φ0 : X → [− 13 , 13 ]
wie im Lemma. Der Fehler auf A ist φ0 = f − Φ0 |A : A → [− 32 , 32 ]. Zu φ0
existiert Φ1 : X → [− 13 · 23 , 13 · 23 ] wie im Lemma.
Per Induktion für n ∈ N ergibt sich der verbleibende Fehler als
(
)
φn = f − Φ0 + Φ1 + · · · + Φn : A → [−( 23 )n+1 , ( 23 )n+1 .
A
75
D | Kompaktheit
Dank Lemma
Φn+1 : X → [− 13 ( 23 )n+1 , 13 ( 23 )n+1 ]. Damit konver∑ existiert
n
giert Fn = k=0 Φn gleichmäßig auf X, denn
n
∑
∥Φk ∥ ≤
k=0
∞
∑
1 2 k
3(3)
= 1.
k=0
Die Grenzfunktion F : X → R ist also stetig als glechimäßiger Grenzwert
stetiger Funktionen und erfüllt
∥F ∥ ≤
∞
∑
∥Φk ∥ = 1,
k=0
also F (X) ⊆ [−1, 1]. Wegen φn → 0 gilt f − Fn |A → 0, also F |A = f . □
Korollar D5.8
Sei (X, T ) ein T4 -Raum. Ist A ⊆ X abgeschlossen, f : A → Rn stetig, so
existiert F : X → Rn stetig mit F |A = f .
Bemerkung
Der Zielraum Rn ist wesentlich. Sei Y = R \ {0}, X = [−1, 1], A =
{−1, 1}, f : A → Y, f (±1) := ±1. Hier existiert nach Zwischenwertsatz
keine stetige Fortsetzung.
Satz D5.9 (Metrisierbarkeitssatz von Urysohn, 1924)
Sei (X, T ) ein topologischer Raum, der dem zweiten Abzählbarkeitsaxiom genügt. Dann sind äquivalent
1) X ist metrisierbar,
2) X ist regulär, d.h. T1 und T3 ist erfüllt,
3) X ist normal, d.h. T1 und T4 ist erfüllt,
4) X ist homöomorph zu einem Teilraum von [0, 1]N (Hilbertwürfel).
Beweis:
„(1) =⇒ (2)“: klar
„(2) =⇒ (3)“: Folgt mit Lemma von Tychonoff.
„(3) =⇒ (4)“: Sei B eine abzählbare Basis. Sei I die abzählbare Menge aller
Paare i = (U, V ) mit U, V ∈ B und U ⊆ V .
Dank Urysohn existiert fi : X → [0, 1] mit fi |U = 0, fi |X\V = 1.
Wir erhalten hieraus h : X → [0, 1]I , h(x) = (fi (x))i∈I . Dies ist eine
Einbettung.
„(4) =⇒ (1)“: [0, 1]N ist metrisierbar, etwa durch
d(x, y) =
∞
∑
k=0
76
2−k−1 |xi − yi |,
Trennungsaxiome und Metrisierbarkeit | D5
siehe Übungsaufgabe.
□
77
E. Zusammenhang und
Homotopie
26.11.2013
E1. Zusammenhang
Definition E1.1
Sei f : X → R eine stetige Funktion. Wir definieren die Zwischenwerteigenschaft als
∀y ∈ R, a, b ∈ X : f (a) ≤ y ≤ f (b) =⇒ ∃x ∈ X : f (x) = y.
Satz E1.2
Sei (X, T ) ein topologischer Raum. Dann sind folgende Aussagen äquivalent:
(1) Jede stetige Funktion f : X → R hat die Zwischenwerteigenschaft
(2) Für f : X → R stetig ist f (X) ⊆ R ein Intervall.
(3) Jede stetige Funktion f : X → {0, 1} ⊆ R ist konstant.
(4) Jede stetige Funktion f : X → Y in einen diskreten Raum Y ist konstant.
(5) Für jede offene Zerlegung X = A ⊔ B gilt A = ∅ oder B = ∅.
(X, T ) mit diesen Eigenschaften nennen wir zusammenhängend.
Beweis:
„(1) =⇒ (2) =⇒ (3)“: Leicht nachvollziehbar.
„(3) =⇒ (4)“: Sei x ∈ X, y := f (x) und g : Y → {0, 1} ⊆ R, g(y) :=
1, g|Y \{y} := 0. g ist stetig, da Y diskret, also konstant g = 1 nach
Voraussetzung. Damit ist auch f (X) ⊆ g −1 (1) = {y}, also f konstant.
„(4) =⇒ (5)“: Sei f : X → {0, 1}, f |A := 0, f |B := 1. f ist stetig (al-
le möglichen Urbilder sind offen in X), also ist f nach Voraussetzung
konstant und damit A = f −1 ({0}) = ∅ oder B = f −1 ({1}) = ∅.
„(5) =⇒ (1)“: Sei f : X → R stetig. Angenommen es existieren y ∈ R
und a, b ∈ X mit f (a) ≤ y ≤ f (b), aber y ̸∈ f (X). Dann wäre X = A⊔
B mit A = f −1 (R<y ) ∋ a, B = f −1 (R>y ) ∋ b eine offene Zerlegung
von X, ein Widerspruch zur Voraussetzung.
□
79
E | Zusammenhang und Homotopie
Beispiel E1.3
• Jedes Intervall I ⊆ R ist zusammenhängend (nach Zwischenwertsatz, B4.8).
• R \ {a} ist nicht zusammenhängend, denn R \ {a} = R<a ⊔ R>a ist offene
Zerlegung.
• Q ist nicht zusammenhängend (für ξ ∈ R \ Q ist Q = Q<ξ ⊔ Q>ξ offene
Zerlegung).
Satz E1.4
Sei (X, <) linear geordnet. Jedes Intervall I ⊆ X ist zusammenhängend genau
dann, wenn X vollständig geordnet und zu allen a, b ∈ X, a < b ein Zwischenwert c ∈ X, a < c < b existiert.
Beweis:
Wie in R, bzw. Q.
□
Beispiel E1.5
• (R, <) ist vollständig geordnet, also jedes Intervall I ⊆ R zusammenhängend.
• Das Intervall [0, 1]Q ist nicht zusammenhängend, denn für ξ ∈ [0, 1]\[0, 1]Q
ist
{
} {
}
[0, 1]Q = x ∈ Q|0 ≤ x < ξ ⊔ x ∈ Q|ξ < x ≤ 1
eine offene Zerlegung. Also ist (Q, <) nicht vollständig geordnet.
Satz E1.6
Sei f : X → Y stetig. Falls X zusammenhängend ist, dann auch f (X).
Beweis:
Ist f (X) = A ⊔ B offene Zerlegung, so auch X = f −1 (A) ⊔ f −1 (B), also
A = ∅ oder B = ∅.
□
Lemma E1.7
Sei X ein topologischer Raum und Ai ⊆ X für i ∈ I zusammenhängend. Für
jedes Paar i, j ∈ I existiere eine Kette i = i0 , i1 , . . . , in = j in I mit Aik−1 ∩
Aik ̸= ∅ für k = 1, . . . , n.
Dann ist A = ∪i∈I Ai zusammenhängend.
Beweis:
Sei f : A → {0, 1} stetig. Dann ist fi := f |Ai : Ai → {0, 1} stetig, also fi
konstant, kurz fi = ci . Für i = i0 , . . . , in = j wie oben gilt dann ci = · · · =
cj .
□
Lemma E1.8
Seien X1 , . . . , Xn zusammenhängend, so auch X = X1 × · · · × Xn .
80
Zusammenhang | E1
Beweis:
Sei a ∈ X und f : X → {0, 1} stetig. Zu b ∈ X betrachte
Ai = {b1 } × · · · × {bi−1 } × Xi × {ai+1 } × · · · × {an }
∼
= Xi .
Es gilt a ∈ A1 , b ∈ An und Ai−1 ∩Ai ∋ (b1 , . . . , bi−1 , ai , . . . , an ). Nach dem
Lemma ist A1 ∪ · · · ∪ An zusammenhängend, also f (b) = f (a) = const. □
Lemma E1.9
Sei (X, T ) ein topologischer Raum, A ⊆ X zusammenhängend und A ⊆ B ⊆
A. Dann ist auch B zusammenhängend.
Beweis:
Sei f : B → {0, 1} stetig, dann ist f |A = c konstant. Die Abbildungen
f, c : B → {0, 1} sind stetig und stimmen auf A überein. A ist dicht in B
und {0, 1} ist hausdorffsch. Also gilt f = c.
□
Satz E1.10 (Zusammenhang der Produkttopologie)
Sei (X∏
i )i∈I eine Familie topologischer Räume mit Xi ̸= ∅. Der Produktraum
X = i∈I Xi ist genau dann zusammenhängend, wenn jedes Xi zusammenhängend ist.
Beweis:
„ =⇒ “: Klar, da pi : X → Xi stetig und surjektiv ist.
„ =⇒ “: Sei a ∈ X. Für J ⊆ I endlich sei
AJ :=
∏
i∈I
{
Ai ,
Aj :=
Xj
j∈J
.
{aj } j ∈ I \ J
Aj ist zusammenhängend nach obigem Lemma. Damit ist auch A =
∪J AJ zusammenhängend, denn AJ ∩ Aj ∋ {a}.
∏
Es gilt außerdem A = X: Jede offen Menge U ⊆ X enthält i∈I Ui ,
wobei Ui ⊆ Xi offen und Ui = Xi für i ∈ I \ J außerhalb einer endlichen Menge. Ist U nicht-leer, dann gilt Ui ̸= ∅ für alle i ∈ I. Demnach
existiert b ∈ U mit bj ∈ Uj für alle j ∈ J und bi = ai für alle i ∈ I \ j.
Damit gilt b ∈ AJ , also b ∈ U ∩ A.
□
Definition E1.11
Sei (X, T ) ein topologischer Raum. Für x, y ∈ X definieren wir x ≡ y durch
die Bedingung, dass x, y in einer zusammenhängenden Teilmenge von X liegen.
Dies ist eine Äquivalenzrelation.
81
E | Zusammenhang und Homotopie
Die Äquivalenzklasse Z(x) von x ∈ X heißt (Zusammenhangs-)Komponente
von x in X. Dies definiert die Zerlegung
Z(X) := {Z(x) : x ∈ X}.
Beispiel E1.12
• X ist zusammenhängend genau dann, wenn Z(X) = {X}.
• Z(R \ {0}) = {R<0 , R>0 }.
• Z(Q) = {{x} : x ∈ Q}.
Satz E1.13
(1) Z(x) ist der größte zusammenhängende Teilraum von X, der x enthält.
(2) Jede Komponente Z(x) ist abgeschlossen.
(3) Ist die Zerlegung Z(X) endlich, so ist jede Komponente offen und X =
⊔ Z(X) ist eine Summentopologie.
Satz E1.14
(1) Ist f : X → Y stetig, so gilt f (Z(x)) ⊆ Z(f (x)).
(2) Wir erhalten hieraus Z(f ) : Z(X) → Z(Y ) : Z(x) 7→ Z(f (x)).
(3) Es gilt Z(IdX ) = IdZ(X) und Z(g ◦ f ) = Z(g) ◦ Z(f ).
Beweis:
(1) und (2) sind klar nach den vorigen Ergebnissen, zeige noch (3). Es gilt
Z(g ◦ f )(Z(x)) = Z(g(f (Z(x))))
= Z(g)(Z(f (Z(x))))
= Z(g)(Z(f )(Z(x)))
= (Z(g) ◦ Z(f ))(Z(x)).
□
E2. Wegzusammenhang
Analog zum Weg in metrischen Räumen definieren wir Wege in topologischen
Räumen.
Definition E2.1
Ein Weg im topologischen Raum (X, T ) ist eine stetige Abbildung γ : [0, 1] →
X. Dabei heißt γ(0) = a Anfangspunkt und γ(1) = b Endpunkt.
Der Raum X heißt wegzusammenhängend, wenn zu jedem Paar a, b ∈ X ein
Weg von a nach b in X existiert (d.h. γ : [0, 1] → X stetig mit γ(0) = a, γ(1) =
b).
82
Wegzusammenhang | E2
Wir definieren die Menge aller Wege P (X) und die Menge aller Wege von a
nach b, P (X, a, b) als
P (X) = C([0, 1], X),
P (X, a, b) = {γ : [0, 1] → X stetig : γ(0) = a, γ(1) = b}.
Außerdem folgende Abbildungen, bzw. Operatoren:
1) X
P (X), a 7→ consta[0,1] ,
2) : P (X, a, b) → P (X, b, a), γ(t) := γ(1 − t),
3) ∗ : P (X, a, b) × P (X, b, c) → P (X, a, c) durch
{
γ1 (2t)
0 ≤ t ≤ 21
(γ1 ∗ γ2 )(t) :=
.
γ2 (2t − 1) 12 ≤ t ≤ 1
Definition E2.2
Wir nennen x, y ∈ X verbindbar in X (durch einen Weg in X), wenn ein Weg
γ : [0, 1] → X von γ(0) = x nach γ(1) = y existiert. Dies ist eine Äquivalenzrelation.
Die Äquivalenzklasse [x] von x heißt Weg(-zusammenhangs)komponente. Dies
definiert die Zerlegung
{
}
π0 (X) := [x]|x ∈ X .
X heißt wegzusammenhängend, wenn π0 (X) = {X}.
Beispiel E2.3
• Jedes Intervall I ⊆ R ist wegzusammenhängend.
• Jede sternförmige Menge X ⊆ Rn ist wegzusammenhängend.
• Sn ⊆ Rn+1 ist wegzusammenhängend für n ≥ 1.
Satz E2.4
Wegzusammenhang impliziert Zusammenhang, aber nicht umgekehrt.
Beweis:
Wie im metrischen Fall. Gegenbeispiel in E2.5.
□
Beispiel E2.5 (Sinuskurve des Topologen)
Sei
{(
)
}
A := x, sin( πx ) |x ∈ (0, 1] ,
{ }
B := 0 × [−1, 1].
83
E | Zusammenhang und Homotopie
Dann ist C := A ∪ B = A zusammenhängend, aber nicht wegzusammenhängend.
02.12.2013
Satz E2.6
Ist f : X → Y stetig und X wegzusammenhängend, so auch f (X).
Satz E2.7
∏
Seien (Xi , Ti ) mit Xi ̸= ∅ topologische Räume. Genau dann ist i∈I Xi wegzusammenhängend, wenn jeder Raum Xi dies ist.
Beweis:
Folgt mit universeller Abbildungseigenschaft und dem letzten Satz.
□
Satz E2.8
1) Ist f : X → Y stetig, so gilt
f ([a]X ) ⊆ [f (a)]Y .
2) Wir erhalten mit 1) die Abbildung
π0 (f ) : π0 (X) → π0 (Y ) : [a]X 7→ [f (a)]Y .
3) Es gilt π0 (IdX ) = Idπ0 (X) und π0 (g ◦ f ) = π0 (g) ◦ π0 (f ). Das folgende
Diagramm kommutiert:
X
π0 (X)
π0 (g◦f )
f
π0 (Y ) .
Y
g◦f
g
Z
π0 (f )
π0 (Z)
π0 (g)
Beweis:
3) Es gilt
π0 (g ◦ f )([a]X ) = [(g ◦ f )(a)]Z = [g(f (a))]Z = π0 (g)([f (a)]Y )
= π0 (g)(π0 (f )([a]X )) = (π0 (g) ◦ π0 (f ))([a]X ). □
E3. Lokaler Zusammenhang
Definition E3.1
Ein topologischer Raum (X, T ) heißt lokal (weg-)zusammenhängend in a ∈ X,
wenn jede offene Umgebung von a in X eine (weg-)zusammenhängende offene
Umgebung enthält.
84
Homotopie stetiger Abbildungen | E4
Beispiel E3.2
• Rn ist lokal wegzusammenhängend, denn B(a, ε) ist sternförmig und somit wegzusammenhängend. Ebenso jeder topologische Vektorraum (ausgeglichene Umgebung ist sternförmig).
• Ist X lokal wegzusammenhängend, so auch jede offene Teilmenge U ⊆ X.
Beispiel E3.3
• Die „Sinuskurve des Topologen“ (siehe E2.5) ist zusammenhängend, aber
nicht lokal zusammenhängend.
• Der „rationale Kamm“
X = ([0, 1] × {0}) ∪ ([0, 1]Q × [0, 1])
ist wegzusammenhängend, aber nicht lokal wegzusammenhängend.
• X = [0, 1] ∪ [2, 3] ist lokal (weg-)zusammenhängend, aber nicht global
(weg-)zusammenhängend.
Zu jedem Raum X haben wir die Zerlegungen X = ⊔ Z(X) und X = ⊔ π0 (X).
Satz E3.4
Ist X lokal zusammenhängend, so ist X = ⊔ Z(X) eine offene Zerlegung.
Ist X lokal wegzusammenhängend, so ist X = ⊔ π0 (X) eine offene Zerlegung.
In diesem Fall gilt π0 (X) = Z(X).
Beweis:
Leicht nachzuvollziehen.
□
E4. Homotopie stetiger Abbildungen
Definition E4.1
Eine Homotopie ist eine stetige Abbildung H : [0, 1] × X → Y . Für jedes
t ∈ [0, 1] ist dann Ht : X → Y mit Ht (x) := H(t, x) stetig.
Zwei stetige Abbildungen f, g : X → Y heißen homotop in Y , wenn es eine
Homotopie H : [0, 1] × X → Y mit H0 = f und H1 = g gibt. Wir schreiben
dann H : f ≃ g, oder f ≃ g
Ist f : X → Y homotop zu const∗X : X → {∗} ⊆ Y , so nennen wir f
nullhomotop, Kurz f ≃ ∗.
Der Raum X heißt zusammenziehbar, wenn ∃∗ ∈ Y : IdX ≃ ∗.
Beispiel E4.2
Sei X ⊆ Rn sternförmig bezüglich a ∈ X (z.B. X = Rn , a = 0). Dann ist X
85
E | Zusammenhang und Homotopie
zusammenziehbar mittels
H : [0, 1] × X → X,
H(t, x) = (1 − t)x + ta.
H ist wohldefiniert und stetig für alle (t, x) ∈ [0, 1] × X. Es gilt H0 =
IdX , H1 = constaX .
Satz E4.3
Seien f, g : X → Sn stetig und nirgends antipodal, d.h. f (x) ̸= −g(x) für alle
x ∈ X. Dann sind f und g homotop in Sn mittels
H(t, x) :=
(1 − t)f (x) − tg(x)
.
|(1 − t)f (x) − tg(x)|
Beweis:
□
klar
Korollar E4.4
Ist f : X → Sn stetig, aber nicht surjektiv, so gilt f ≃ ∗.
Beweis:
Es gibt zwei Möglichkeiten, dies zu beweisen:
1. Wähle a ∈ Sn \ f (X) und g = const−a
X , dann ist f ≃ g gemäß E4.3.
2. Mittels stereographischer Projektion. Für a ∈ Sn \ f (X) ist Sn \ {a} ∼
=
Rn und Rn ≃ ∗ wie in E4.2.
□
Definition E4.5
Die Homotopie lässt folgende Eigenschaften zu
(1) Zu f : X → Y haben wir H : f ≃ f mit H(t, x) = f (x).
(2) Zu H : f ≃ g definieren wir H : g ≃ f mit H(t, x) := H(1 − t, x).
(3) Zu H : f ≃ g und K : g ≃ h definieren wir (H ∗ K) : f ≃ h durch
{
H(2t, x)
0 ≤ t ≤ 12
(H ∗ K)(t, x) =
.
K(2t − 1), x) 12 ≤ t ≤ 1
Insbesondere ist damit Homotopie eine Äquivalenzrelation.
Definition E4.6
Die Menge der Homotopieklassen von C(X, Y ) bezeichnen wir mit
[X, Y ] := C(X, Y )/ ≃ .
86
Homotopie stetiger Abbildungen | E4
Satz E4.7
Aus H : f0 ≃ f1 : X → Y und K : g0 ≃ g1 : Y → Z folgt L : g0 ◦ f0 ≃ g1 ◦ f1
mittels
L(t, x) = K(t, H(t, x)).
Wir schreiben auch Lt = Kt ◦ Ht .
Korollar E4.8
Wir haben eine Kategorie Toph:
• Objekte sind topologische Räume X, Y, Z, . . . ,
• Morphismen sind Homotopieklassen [f ] von stetigen Abbildungen f :
X →Y,
• Die Komposition ist [g] ◦ [f ] = [g ◦ f ].
Satz E4.9
Der Funktor π0 : Top → Set ist homotopie-invariant, d.h. aus f ≃ g folgt
π0 (f ) = π0 (g).
Top
π0
Set .
q
Toph
π0
Definition E4.10
Zwei Räume X, Y heißen homotopie-äquivalent, geschrieben X ≃ Y , wenn es
stetige Abbildungen f : X → Y und g : Y → X gibt mit g ◦ f ≃ IdX und
f ◦ g ≃ IdY .
Beispiel E4.11
1) Falls X ∼
= Y , dann auch X ≃ Y .
∼ Y , z.b. R ̸∼
2) Aus X ≃ Y folgt nicht X =
= R2 , aber R ≃ R2 ≃ ∗.
Beispiel E4.12
Sei X = Sn und Y = Rn+1 \ {0}. Dann sind X und Y homotopie-äquivalent.
Beweis:
Sei f : X
Y die Inklusion und g : Y → X, g(y) =
g ◦ f = IdX , zeige noch f ◦ g ≃ IdX :
y
|y| .
Offenbar ist
i) f ◦ g ist Retraktion, d.h. (f ◦ g)|X = IdX ,
ii) H : [0, 1] × Y → Y mit
H(t, y) = (1 − t)y + t(f ◦ g)(y) ∈ Y
87
E | Zusammenhang und Homotopie
ist ein Deformationsretraktion, d.h. stetig mit H0 = IdY , H1 (Y ) ⊆ X
und H1 |X = IdX .
iii) H ist eine starke Deformationsretraktion, d.h. zusätzlich gilt Ht |X = IdX
für alle t ∈ [0, 1].
Also ist f ◦ g ≃ IdX .
88
□
F. Die Sprache der Kategorien
03.12.2013
F1. Kategorien
Definition F1.1 (Katogorie)
Eine (Links)Kategorie C = (Ob, Mor, ◦) hat folgende Bestandteile:
a) eine Klasse Ob von Objekten A, B, C, D, . . . ∈ Ob,
b) zu A, B ∈ Ob eine Klasse Mor(A, B) von Morphismen von A nach B,
c) zu A, B, C ∈ Ob eine Verknüpfung
◦ : Mor(B, C) × Mor(A, B) → Mor(A, C).
wobei folgende Bedingungen erfüllt sein müssen:
1) Zu jedem B ∈ Ob existiert IdB ∈ Mor(B, B), sodass für alle A, C ∈
Ob, f ∈ Mor(A, B), g ∈ Mor(B, C) gilt
IdB ◦f = f,
g ◦ IdB = g.
2) Es gilt Assoziativität, d.h. für alle A, B, C, D ∈ Ob, f ∈ Mor(A, B), g ∈
Mor(B, C), h ∈ Mor(C, D) gilt
h ◦ (g ◦ f ) = (h ◦ g) ◦ f.
Bemerkung
Die Verknüpfung ist derart gewählt, dass nach links hin verknüpft wird (wie
bei der Komposition von Funktionen auch). Kategorien mit Verknüpfung
nach rechts hin heißen Rechtskategorien.
Beispiel F1.2
• Top: (topologische Räume, stetige Abbildungen, Komposition)
•
– Set: (Mengen, Abbildungen, Komposition).
– Setinj : (Mengen, injektive Abbildungen, Komposition).
– Setsur : (Mengen, surjektive Abbildungen, Komposition).
• FinSet: (endliche Mengen, Abbildungen, Komposition)
89
F | Die Sprache der Kategorien
• (X, ≤, Transitivität)
• Grp: (Gruppen, Gruppenhomomorphismen, Komposition)
• FinGrp: (endliche Gruppen, Gruppenhomomorphismen, Komposition)
• Ab: (abelsche Gruppen, Gruppenhomomorphismen, Komposition)
• VecK : (K-Vektorräume, K-lineare Abbildungen, Komposition)
• MatK : (N, Matrizen über K, Multiplikation)
MatK (q, r) × Mat(p, q) → MatK (p, r)
Ein Diagramm
Kommutative Diagramme
B
f
g
h
A
C
kommutiert, falls h = g ◦ f .
Beispiel F1.3
•
B
f
g
IdB
A
f
C
g
B
•
B
f
g
h◦g
(h◦g)◦f
A
D
h◦(g◦f )
g◦f
h
C
• g ist Linksinverse von f ; g ist Rechtsinverse von f ; f und g sind zueinander
invers:
X
IdX
X
90
f
Y
Y
g
IdY
g
X
X
f
Y
f
IdX
X
Y
IdY
g
f
Y
Funktoren | F2
Definition F1.4
• Zwei Morphismen f : X → Y und g : Y → X in C heißen zueinander
invers, wenn g ◦ f = IdX und f ◦ g = IdY gilt.
• Wir nennen f : X → Y in C invertierbar, oder einen C-Isomorphismus,
∼
=
geschrieben f : X −
→ Y , wenn es zu f einen inversen Morphismus g :
Y → X in C gibt.
• Zwei Objekte X, Y ∈ C heißen isomorph, geschrieben X ∼
= Y , wenn ein
Isomorphismus f : X → Y existiert.
Beispiel F1.5
• In Set sind Bijektionen Isomorphismen.
• In (X, ≤, Transitivität) bedeutet Isomorphie Gleichheit.
• In VecK K-lineare Isomorphismen.
• In MatK beudetet Isomorphie m = n in N.
• In Grp Gruppenisomorphismen.
• In Top Homöomorphismen.
F2. Funktoren
Definition F2.1
Seien C, D Kategorien. Ein kovarianter Funktor F : C → D ordnet jedem Objekt
X in C ein Objekt F (X) in D zu und jedem Morphismus f : X → Y in C
einen Morphismus F (f ) : F (X) → F (Y ) in D, sodass F (IdX ) = IdF (X) und
F (g ◦ f ) = F (g) ◦ F (f ).
F (Y )
Y
f
X
7→
g
h
Z
F (f )
F (X)
F (g)
F (h)
F (Z)
Beispiel F2.2
• kontravarianter Funktor:
HomK ( · , K) : VecK → Vec
V 7→ V ∗ = HomK (V, K)
(f : V → W ) 7→ (f ∗ : W ∗ → V ∗ , f ∗ (h) = h ◦ f )
91
F | Die Sprache der Kategorien
• kovarianter Funktor:
HomK (X, · ) : VecK → VecK
V 7→ HomK (X, V )
(f : V → W ) 7→ (f∗ : Hom(X, V ) → Hom(X, V ), f∗ (h) = f ◦ h)
Definition F2.3
Ein kontravarianter Funktor G : C → D ordnet jedem Objekt X in C ein Objekt
G(X) in D zu und jedem Morphismus f : X → Y in C einen Morphismus G(f ) :
G(Y ) → G(X) in D, sodass G(IdX ) = IdG(X) und G(g ◦ f ) = G(f ) ◦ G(g)
G(Y )
Y
f
X
7→
g
h
Z
G(f )
G(X)
G(g)
G(h)
G(Z)
Beispiel F2.4
• Zusammenhangskomponenten
Z : Top → Set
X 7→ Z(X)
(f : X → Y ) 7→ (Z(f ) : Z(X) → Z(Y ))
• Wegzusammenhangskomponenten
π0 : Top → Set
X 7→ π0 (X)
(f : X → Y ) 7→ (π0 (f ) : π0 (X) → π0 (Y ))
• „Vergiss“-Funktor (die Topologie wird „vergessen“)
V : Top → Set
(X, T ) 7→ X
(f : (X, TX ) → (Y, TY )) 7→ (f : X → Y )
• Potenzmenge (kovariant)
P∗ : Set → Set
X, 7→ P(X)
(f : X → Y ) 7→ (f∗ : P(X) → P(y), f∗ (A) := f (A))
92
Natürliche Transformationen | F3
• Potenzmenge (kontravariant)
P ∗ : Set → Set
X 7→ P(X)
(f : X → Y ) 7→ (f ∗ : P(Y ) → P(X), f ∗ (B) := f −1 (B))
F3. Natürliche Transformationen
Definition F3.1
Seien F, G : C → D Funktoren. Eine (natürliche) Transformation t : F → G
ordnet jedem Objekt X in C einen Morphismus t(X) : F (X) → G(X) in D zu,
sodass für jeden Morphismus f : X → Y in C die Gleichung t(Y ) ◦ F (f ) =
G(f ) ◦ t(X) gilt.
X
F (X)
f
t(X)
G(X)
F (f )
Y
F (Y )
G(f )
t(Y )
G(Y )
∼
=
Gilt hierbei t(X) : F (X) −
→ G(X) für alle X, so heißt t (natürliche) Äquivalenz von F und G.
Beispiel F3.2
π0 (X)
a7→[a]X
X
t(X)
f
π0
π0 (Y )
b7→[b]Y
Y
t(Y )
b7→ZY (b)
a7→ZX (a)
Z(X)
Z(f )
Z(Y )
mit
t(X) : π0 (X) → Z(X)
[a]X 7→ ZX (a)
Bemerkung
Lokale wegzusammenhängende Räume bilden eine Unterkategorie von Top.
Hierauf sind die Funktoren π0 und Z natürlich äquivalent.
93
Teil II.
Geometrische Topologie
95
G. Simpliziale Komplexe
09.12.2013
G1. Simplizialkomplexe
G1.1. Simplizes
Definition G1.1
Sei V ein R-Vektorraum und v0 , v1 , . . . , vn ∈ V . Wir nennen v0 , v1 , . . . , vn
affin unabhängig, wenn v1 − v0 , v2 − v0 , . . . , vn − v0 linear unabhängig sind.
Bemerkung
Die Wahl von v0 ist willkürlich und unerheblich, äquivalent wäre: v0 −
vk , . . . , vk−1 − vk , vk+m − vk , . . . , vn − vk linear unabhängig für beliebiges
k ∈ N.
Proposition G1.2
Sei V ein R-Vektorraum.
v0 , v1 , . . . , vn ∑
∈ V sind affin
genau dann,
∑n
∑
∑ unabhängig
n
n
n
′
′
wenn aus i=0 ti vi =
t
v
und
t
=
t
für
alle
i ∈ I folgt
i=0 i i
i=0 i
i=0 i
ti = t′i .
Beweis:
„ =⇒ “: Es gilt
0=
n
∑
z
(t′i
− ti )vi −
i=0
n
∑
=0
}|
(t′i
{
− ti )v0 =
i=0
n
∑
(t′i − ti )(vi − v0 ),
i=1
wegen der affinen Unabhängigkeit ist {vi − v0 }ni=1∑linear unabhängig,
∑n ′
n
also t′i = ti für alle i ∈ {1, . . . , n} und somit dank i=0 ti =
i=0 ti
auch t′0 = t0 .
∑n
′
„ =⇒ “: Sei
i=1 λi (vi − v0 ) = 0. Setze ti = 0 für i ∈ {0, . . . , n}, t0 :=
−λ1 − λ2 − · · · − λn und ti := λi für i ∈ {1, . . . , n}. Dann ist
n
∑
ti = 0 =
i=0
n
∑
i=0
t i vi = 0 =
n
∑
t′i
i=0
n
∑
i=1
λi (vi − v0 ) =
n
∑
t′i vi
i=0
97
G | Simpliziale Komplexe
also t′i = ti = 0 und somit auch λi = 0.
□
Definition G1.3 (Standardsimplex)
Für n ∈ N0 ist der n-dimensionale Standardsimplex definiert als der Raum
{
}
∆n := (t0 , . . . , tn ) ∈ Rn+1 |t0 , . . . , tn ≥ 0, t0 + · · · + tn = 1 .
Wir definieren außerdem ∆−1 := ∅.
Konvention G1.4
Im Folgenden sei V stets ein R-Vektorraum und v0 , . . . , vn ∈ V affin unabhängig.
Definition G1.5 (affiner Simplex)
Die konvexe Hülle von v0 , . . . , vn ist der affine n-Simplex
∆ := [v0 , v1 , . . . , vn ]
}
{
:= t0 v0 + t1 v1 + · · · + tn vn |(t0 , . . . , tn ) ∈ ∆n .
Im Kontext von ∆ nennen wir t0 , t1 , . . . , tn auch baryzentrische Koordinaten.
Der affine (−1)-Simplex sei [∅] := ∅.
Außerdem definieren wir die Abbildungen vert : ∆ → P(V ), dim : ∆ → N0
durch
vert : [v0 , . . . , vn ] 7→ {v0 , . . . , vn },
dim : [v0 , . . . , vn ] 7→ n.
Bemerkung
Nach G1.2 sind die baryzentrischen Koordinaten eindeutig.
Konvention G1.6
Soweit nicht anders angemerkt sei ∆ := [v0 , v1 , . . . , vn ] stets der von
v0 , . . . , vn aufgespannte affine Simplex.
Das Attribut „affin“ wird bei Simplizes oft weggelassen.
Beispiel G1.7
• Der n-dimensionale Standardsimplex ist ein affiner n-Simplex:
∆n = [e0 , . . . , en ] ⊆ Rn+1
98
Simplizialkomplexe | G1
• ∆n ⊆ Rn+1 ist gemäß G1.8 homöomorph zu
{
}
[0, e1 , . . . , en ] = (t1 , . . . , tn ) ∈ Rn t1 , . . . , tn ≥ 0, t1 + · · · + tn ≤ 1
⊆ Rn .
Bemerkung G1.8
Der Standardsimplex ∆n und der affine n-Simplex ∆ sind homöomorph vermö∼
=
ge h : ∆n −
→ ∆,
h(t0 , . . . , tn ) = t0 v0 + · · · + tn vn .
Beweis:
Surjektivität folgt direkt aus der Definition, Injektivität aus der Eindeutigkeit der baryzentrischen Koordinaten und die Homöomorphie damit mittels
D2.15.
□
Definition G1.9
1) Für S ⊆ vert(∆) heißt [S] eine Seite von ∆, kurz [S] ≤ ∆.
Eine Seite [S] ≤ ∆ heißt echt, kurz [S] < ∆, falls [S] ̸= ∆.
2) Der Rand von ∆ ist ∂∆ := ∪[S]<∆ [S], das Innere ist Int ∆ := ∆ \ ∂∆.
Bemerkung
Rand und Inneres sind nur dann gleichbedeutend mit den bisherigen topologischen Definitionen, wenn wir die Topologie des affinen Vektorraums zugrundelegen und nicht die des gesamten Vektorraums.
So ist beispielsweise für ∆ := [0, e1 ] ⊆ R2 der Rand des Simplex
{
}
∂∆ = (0, 0), (1, 0) = ∂T∆ ∆,
während ∂TV ∆ = ∆.
G1.2. Affine Simplizialkomplexe
Im Folgenden wollen wir komplexere Gebilde, bestehend aus Simplizes, betrachten und beschreiben. Diese sogenannten Simplizialkomplexe werden im Wesentlichen durch die Simplizes beschrieben aus denen sie bestehen, inklusive Simplizes
niederer Dimensionen, welche beispielsweise gemeinsame Kanten oder Ecken beschreiben.
Definition G1.10 (affiner Simplizialkomplex)
Ein (affiner) Simplizialkomplex K in V ist eine Menge von affinen Simplizes
∆ ⊆ V , mit den Eigenschaften
99
G | Simpliziale Komplexe
0) ∅ ∈ K,
1) ∆′ ≤ ∆ ∈ K =⇒ ∆′ ∈ K,
2) ∆1 , ∆2 ∈ K =⇒ ∆1 ∩ ∆2 ≤ ∆1 , ∆2 .
Wir vereinbaren die Dimension
{
}
dim K := sup dim ∆|∆ ∈ K ,
die Eckenmenge
Ω(K) :=
∪
{
}
vert ∆|∆ ∈ K ,
und den Polyeder
|K| :=
∪K = ∪
{
}
∆|∆ ∈ K .
Jedes Simplex ∆ ∈ K versehen wir mit seiner euklidischen Topologie.
Das Polyeder |K| versehen wir mit seiner simplizialen Topologie: eine Menge
U ⊆ |K| sei offen, wenn für jeden Simplex ∆ ∈ K die Menge U ∩ ∆ offen in ∆
ist.
Beispiel G1.11 (Gegenbeispiele)
Beispiel G1.12
• Für eine Eckenmenge Ω ist
{
}
K = {∅} ∪ {a} : a ∈ Ω
ein 0-dimensionaler Simplizialkomplex. Es gilt |K| = Ω und die simpliziale
Topologie stimmt mit der diskreten überein.
• Ein Simplizialkomplex K mit dim K ≤ 1 heißt simplizialer Graph. Siehe für
Details Übungsblatt 9, Teil 3.
• Die simpliziale Sinuskurve des Topologen (A bestehend aus abzählbar vielen geraden Strecken entlang der Sinuskurve, B als die vertikale Strecke).
Hier sind A und B disjunkt und beide offen (in E2.5 war B nicht offen in
A ∪ B).
Bemerkung G1.13
Ist K in V lokal-endlich, so stimmen die simpliziale Topologie auf |K| und die
Teilraumtopologie auf |K| ⊆ V überein.
Im Allgemeinen gilt das nicht, siehe „unendlicher Stern“, Übungsaufgabe: Blatt
9, 2.3.
Beweis:
siehe G3.2.
100
□
Simplizialkomplexe | G1
G1.3. Kombinatorische Simplizialkomplexe
Es liegt nahe, dass ein Simplizialkomplex auch beschrieben werden könnte durch
Angabe der Eckpunkte und der Information, welche k Eckpunkte zu affinen (k−1)Simplizes verbunden werden sollen. Beispielsweise
{
}
K := ∅, {a}, {b}, {c}, {d}, {a, b}, {b, c}, {a, c}, {c, d}, {a, b, d} .
Auf diese Art gegebene Simplizialkomplexe nennen wir kombinatorische Simplizialkomplexe.
Definition G1.14 (kombinatorischer Simplizialkomplex)
Ein kombinatorischer Simplizialkomplex ist ein System K endlicher Mengen mit
den Eigenschaften
0) ∅ ∈ K,
1) T ⊆ S ∈ K =⇒ T ∈ K.
Wir vereinbaren für S ∈ K die Dimension dim S = |S|−1 und für K: dim K :=
sup{dim S|S ∈ K}, sowie die Eckenmenge
Ω(K) :=
∪ K := ∪ S.
S∈K
Konvention G1.15
Im Folgenden sei K soweit nicht anders festgelegt stets ein kombinatorischer
Simplizialkomplex mit Eckenmenge Ω = Ω(K).
Definition G1.16 (Darstellung, Realisierung)
Eine Darstellung f : K → V ist eine Abbildung f : Ω(K) → V , so dass
1) für S ∈ K ist f (S) ⊆ V affin unabhängig,
2) für S, T ∈ K gilt [f (S)] ∩ [f (T )] = [f (S ∩ T )].
Damit ist K := Kf := {[f (S)]|S ∈ K} ein affiner Simplizialkomplex. Das
Polyeder |K|f := |K| heißt topologische Realisierung von K mittels f .
Definition G1.17 (kanonische Realisierung)
Sei im R-Vektorraum RΩ die kanonische Basis (es )s∈Ω gegeben durch es : Ω →
R mit es (s) := 1 und es (s′ ) := 0 für s′ ̸= s.
Die Abbildung f : Ω → RΩ : s 7→ es heißt kanonische Darstellung von K. Der
Komplex K := {[f (s)]|s ∈ K} heißt kanonischer affiner Simplizialkomplex zu
K und |K| := |K| heißt kanonische Realisierung von K.
Bemerkung
Wir können die kanonische Realisierung auch folgendermaßen charakterisie101
G | Simpliziale Komplexe
ren:
{
|K| =
}
∑
x : Ω → [0, 1] supp(x) ∈ K,
x(s) = 1 .
s∈Ω
Dies erlaubt die Beschreibung eines Punktes x ∈ |K| durch eindeutige baryzentrische Koordinaten.
Beispiel G1.18
Zu Dn := P({0, 1, . . . , n}) ist die kanonische Realisierung das Standardsimplex ∆n = [e0 , . . . , en ] ⊆ Rn+1 zusammen mit all seinen Seiten.
Bemerkung G1.19
Für jede beliebige Darstellung f von K exstiert ein Homöomorphismus h :
∼
=
|K| −
→ |K|f zwischen der kanonischen Realisierung und der Realisierung
durch f , definiert durch
h(x) =
∑
x(s)f (s)
s∈Ω
Beweis:
□
Funktioniert wie in G1.8.
Definition G1.20
Seien K, L Simplizes. Eine simpliziale Abbildung f : K → L ist eine Abbildung
f : Ω(K) → Ω(L) mit S ∈ K =⇒ f (S) ∈ L.
Dies definiert außerdem eine Abbildung f = |f | : |K| → |L| durch affine
Fortsetzung
|f | :
∑
x(s)es 7→
s∈Ω(K)
∑
s∈Ω(K)
x(s) f (es ) .
| {z }
=ef (s)
Bemerkung G1.21
Kombinatorische Simplizialkomplexe mit ihren simplizialen Abbildungen bilden die Kategorie SComp, ebenso wie affine Simplizialkomplexe mit ihren simplizialen Abbildungen die Kategorie AComp bilden. Die Funktoren real für die
Realisierung und vert als Abbildung auf die Eckpunkte bilden folgenden Zusammenhang.
SComp
102
real
vert
AComp
Triangulierung topologischer Räume | G2
G2. Triangulierung topologischer Räume
Definition G2.1
Sei X ein topologischer Raum. Eine Triangulierung (K, h) von X ist ein Tupel
(K, h) bestehend aus einem Simplizialkomplex K und einem Homöomorphis∼
=
mus h : |K| −
→ X.
Beispiel G2.2
Für einen Simplex ∆ = [v0 , . . . , vn ] haben wir affine Unabhängigkeit der Vektoren v0 , . . . , vn ∈ V verlangt. Lässt man diese Bedingung weg, so erhält man
ein Polytop P = [v0 , . . . , vn ], welches die konvexe Hülle endlich vieler Punkte
v0 , . . . , vn ∈ V darstellt.
Tetraeder, Hexaeder (Würfel), Oktaeder, Ikosaeder sind Beispiele für Polytope,
darunter ist jedoch nur der Tetraeder auch ein Simplex (im R3 können höchstens vier Vektoren affin unabhängig sein).
In Simplizes sind die baryzentrischen Koordinaten eindeutig, bei Polytopen ist
das im Allgemeinen jedoch nicht der Fall. Betrachte für ±e1 , ±e2 ∈ R2 beispielsweise das Polytop [±e1 , ±e2 ] (Raute), dann ist 0 = 12 e1 + 12 (−e1 ) =
1
1
2 e2 + 2 (−e2 ).
Analog zu simplizialen Komplexen kann man polytopale Komplexe einführen.
Kegelkonstruktion
G2.1. Zentrische Unterteilung
Ein Oktaeder ist gegeben durch [±e1 , ±e2 , ±e3 ]. Dies ist kein Simplex, aber kann
in acht Simplizes aufgeteilt werden, indem der Ursprung hinzugenommen wird.
Definition G2.3
Sei K ein polytopaler Komplex. Eine Unterteilung von K ist ein Komplex K′
mit |K′ | = |K|, sodass jedes Polytop P ∈ K Vereinigung von endlich vielen
P ′ ∈ K′ ist.
Bemerkung
(Lokal-)Endlichkeit und Dimension bleiben erhalten.
Definition G2.4
Sei L ⊆ K ein Teilkomplex. Eine Unterteilung von K relativ zu L ist eine Unterteilung K′ mit L ⊆ K′ (d.h. P ∈ L werden nicht unterteilt).
Satz G2.5
Sei K ein polytopaler Komplex und L ⊆ K ein simplizialer Teilkomplex, etwa
103
10.12.2013
G | Simpliziale Komplexe
L = {∅}. Dann wird K trianguliert durch zentrische Unterteilung K′ aller Polytope P ∈ K \ L, wobei wir zu jedem P ein Zentrum xP ∈ Int P willkürlich
vorgeben können.
Beweis:
′
′
Induktion über die Skelette K≤0
:= K≤0 . Sei n ≥ 1 und K<n
eine simpliziale
Unterteilung von K<n . Wir setzen dann
{
′
K≤n
}
P
∈
K
\
L,
dim
P
=
n,
′
:= K<n
∪ [v0 , . . . , vk , xP ]|
.
′
[v0 , . . . , vk ] ∈ K<n
∩ ∂P, k < n
□
Beispiel G2.6
• Baryzentrische Unterteilung
• Zentrische Unterteilung mit beliebigen Zentren und L = K≤1
Definition G2.7
Sind x1 , . . . , xn die Eckpunkte des Polytops P , so heißt
β(P ) :=
1
n x1
+ · · · + n1 xn
das Baryzentrum von P . Wählt man im Satz xP := β(P ) für alle P ∈ K \ L, so
nennen wir β(K, L) := (K′ , L) die baryzentrische Unterteilung von K relativ
zu L.
G2.2. Produkte von Komplexen
Produkte von Simplizes sind im Allgemeinen keine Simplizes (∆1 × ∆1 ergibt ein
Quadrat, kein Dreieck).
Satz G2.8
Sind K ∈ V, L ∈ W polytopale Komplexe, so auch
{
}
K × L = P × Q|P ∈ K, Q ∈ L
ein polytopaler Komplex in V ×W . Die baryzentrische Unterteilung M = (K×
L)′ ist ein simplizialer Komplex und liefert eine Triangulierung |M| = |K × L|.
Sind K, L (lokal-)endlich, so auch K × L und M. Die polytopale Topologie auf
|K × L| stimmt mit der Produkttopologie auf |K| × |L| überein.
104
Triangulierung topologischer Räume | G2
G2.3. Euler-Charakteristik
Definition G2.9 (Euler-Charakteristik)
Sei K ein endlicher polytopaler Komplex mit Dimension n = dim K. Definiere
die Anzahl der d-dimensionalen Polytope von K als
{
}
fd := P ∈ K| dim P = d .
Die Euler-Charakteristik ist gegeben durch
∑
χ(K) :=
(−1)dim P =
∅̸=P ∈K
n
∑
(−1)d fd .
d=0
Beispiel G2.10
Der n-Simplex ∆n ∼
= Sn−1 werden trianguliert
= Dn und sein Rand ∂∆n ∼
durch
Dn = P({0, 1, . . . , n})
bzw.
S n−1 = Dn \ {{0, 1, . . . , n}}.
Es gilt
χ(D0 ) = 1
χ(S −1 ) = 0
χ(D1 ) = 2 − 1 = 1
χ(S 0 ) = 2
χ(D2 ) = 3 − 3 + 1 = 1
χ(S 1 ) = 3 − 3 = 0
χ(D3 ) = 4 − 6 + 4 − 1 = 1
χ(S 2 ) = 4 − 6 + 4 = 2
Proposition G2.11
Es gilt
χ(Dn ) = 1,
χ(S n ) = 1 + (−1)n .
Beweis:
Übungsaufgabe Blatt 9, V1.1.
□
Beispiel G2.12
Triangulierungen für S2 :
χ(∂Tetraeder) = 4 − 6 + 4 = 2
χ(∂Oktaeder) = 6 − 12 + 8 = 2
105
G | Simpliziale Komplexe
χ(∂Hexaeder) = 8 − 12 + 6 = 2
χ(∂Dodekaeder) = 20 − 30 + 12 = 2
χ(∂Ikosaeder) = 12 − 30 + 20 = 2
Satz G2.13 (Satz von Euler)
Jede Triangulierung (oder polytopale Unterteilung) von S2 erfüllt χ(K) = 2.
Satz G2.14 (Euler-Poincaré)
Seien K, L endliche polytopale Komplexe. Aus |K| ∼
= |L| folgt χ(K) = χ(L).
Bemerkung
Mit Hilfe diesen Satzes lässt sich die Euler-Charakteristik eines Polytops als
diejenige einer beliebigen Triangulierung definieren.
G3. Simpliziale Approximation
Definition G3.1
Sei K ein (kombinatorischer) Simplizialkomplex mit kanonischer Realisierung
|K| ⊆ RΩ . Definiere die simpliziale Metrik auf der Realisierung als
{
}
d(x, y) := max |x(s) − y(s)| : s ∈ Ω
Satz G3.2
Die simpliziale Topologie auf |K| ist feiner als die metrische Topologie. Sie stimmen überein, wenn K lokal-endlich ist.
Beweis:
□
Leicht nachzuvollziehen
Definition G3.3
Zu a ∈ Ω(K) betrachten wir den offenen Stern
}
Int |S| : a ∈ S ∈ K
}
= x ∈ |K| : x(a) > 0 = B(a, 1)
˚
stK (a) :=
∪
{
{
und den abgeschlossenen Stern
stK (a) :=
∪
{
}
|S| : a ∈ S ∈ K .
Satz G3.4
Jede Ecke a ∈ Ω(K) ist starker Deformationsretrakt von stK (a) ⊆ |K|, ebenso
von B(a, ε) für 0 < ε ≤ 1. Jeder Punkt a ∈ |K| ist starker Deformationsretrakt
einer offenen Umgebung a ∈ U ⊆ |K|.
106
Simpliziale Approximation | G3
Beweis:
Wähle H : [0, 1] × stK (a) → stK (a) durch
H(t, x) = ta + (1 − t)x.
Dies ist wohldefiniert, da stK (a) sternförmig und stetig, da stetig auf jedem
Simplex. Es gilt H0 = Id und H1 = constast (a) , sowei H(t, a) = a für alle
K
t ∈ [0, 1].
Allgemein für a ∈ |K| wählen wir eine zentrische Zerlegung mit a als Ecke.□
Lemma G3.5
Jeder n-Simplex ∆ = [v0 , . . . , vn ] realisiert seinen Durchmesser auf den Ecken:
{
}
diam ∆ := max d(vi , vj )|i, j = 0, . . . , n .
Nach baryzentrischer Unterteilung gilt für jeden Teilsimplex ∆′ ⊆ ∆ die Ungleichung
diam ∆′ ≤
n
n−1
diam ∆.
Satz G3.6
Sei K ein Simplizialkomplex kanonisch realisiert durch K in RΩ . Sei |K| =
∪i∈I Ui eine Überdeckung durch offene Mengen Ui ⊆ |K|.
Dann existiert eine simpliziale Unterteilung K′ des Polyeders |K| = |K′ |, sodass
für jede Ecke a ∈ Ω(K′ ) der abgeschlossene Stern stK′ (a) ganz in einer Menge
Ui enthalten ist.
Beweis:
Wir zeigen den Satz für endliches K. Dann ist |K| kompakt und die simpliziale Topologie wird von der simplizialen Metrik induziert. Es existiert zu
(Ui )i∈I eine Lebesgue-Zahl λ > 0, d.h. für X ⊆ |K| mit diam X < λ existiert
n
i ∈ I mit X ⊆ Ui . Sei n = dim K und q = n+1
< 1. Wir wählen m ∈ N so,
λ
m
dass q < 2 . In der m-fachen baryzentrischen Unterteilung K′ = β m K hat
jeder Simplex ∆ ∈ K Durchmesser diam(∆) < λ2 , also jeder abgeschlossene
Stern Durchmesser < λ.
□
Bemerkung G3.7
Seien K, L simpliziale Komplexe und φ : K → L die simpliziale Abbildung mit
affiner Fortsetzung |φ| : |K| → |L|. Es gilt
|φ|(˚
st(a, K)) ⊆ ˚
st(φ(a), L),
|φ|(st(a, K)) ⊆ st(φ(a), L).
107
16.12.2013
G | Simpliziale Komplexe
Definition G3.8
Sei f : |K| → |L| stetig. Eine simpliziale Approximation von f ist eine Abbildung φ : Ω(K) → Ω(L) mit
f (˚
st(a, K)) ⊆ ˚
st(φ(a), L)
für alle a ∈ Ω(K).
Lemma G3.9
(1) φ ist simplizial, d.h. für S ∈ K =⇒ φ(S) ∈ L.
(2) Für jedes x ∈ |K| liegen f (x) und |φ|(x) in einem gemeinsamen Simplex
von |L|.
(3) Die Abbildungen f und |φ| sind homotop vermöge
H(t, x) = (1 − t)f (x) + t|φ|(x).
Beweis:
□
Übung
Satz G3.10
Jede stetige Abbildung f : |K| → |L| ist homotop zu einer Abbildung g : |K| =
|K ′ | → |L|, die simplizial ist auf einer hinreichend feinen Unterteilung K ′ von
K.
Beweis:
st(b, L) ist eine offen Überdeckung von |L| und damit
|L| = ∪b∈Ω(L) ˚
|K| =
∪
f −1 (˚
st(b, L))
b∈Ω(L)
ebenfalls. Es existiert eine Unterteilung K ′ , sodass für jede Ecke a ∈ Ω(K ′ )
ein φ(a) ∈ Ω(L) existiert mit st(a, K ′ ) ⊆ f −1 (st(φ(a), L)). Also
f (˚
st(a, K ′ )) ⊆ f (st(a, K ′ )) ⊆ ˚
st(φ(a), L).
□
Satz G3.11
Für m < n ist jede stetige Abbildung f : Sm → Sn zusammenziehbar.
Beweis:
∼
∼
=
=
Wir triangulieren |S m | −
→ Sm und |S n | −
→ Sn . Es genügt also zu zeigen:
m
n
Jede stetige Abbildung f : |S | → |S | ist zusammenziehbar. Zu einer
hinreichend feinen Unterteilung K von S m existiert eine simpliziale Appro∼
=
ximation φ : K → S n mit f −
→ |φ| : |S m | = |K ′ | → |S n |. Wegen
∼
m
=
dim K = dim S = m < n = dim S n ist |φ| nicht surjektiv, somit |φ| −
→ ∗.
Erinnerung:
|S n | \ {q} ∼
= Sn \ {p} ∼
= Rn ≃ ∗.
□
108
H. Abbildungsgrad und Topologie
des Rn
H1. Die Umlaufzahl
Wir wollen jeder stetigen Abbildung γ : [0, 1] → C∗ := C \ {0} mit γ(0) = γ(1)
eine Umlaufzahl zuordnen, später sogar allgemein Sn → Rn \ {0}.
Satz H1.1
Sei V = Rd (oder ein normierter R-Vektorraum). Für jede offene Menge X ⊆ V
gilt: jeder Weg γ : [0, 1] → X ist homotop in X relativ zu {0, 1} zu einer
polygonalen Abbildung |w| : [0, 1] → X.
Je zwei polygonale Wege sind genau dann homotop in X relativ der Endpunkte
{0, 1}, wenn sie polygonal homotop sind. Dabei heißen polygonale Wege w, w′
polygonal homotop in X, wenn sie sich durch folgende elementare Homotopien
ineinander überführen lassen:
v0 . . . vk−1 vk vk+1 . . . vn ≈ v0 . . . vk−1 vk+1 . . . vn
mit [vk+1 , vk , vk+1 ] ⊆ X.
Beweis:
□
Wie in der simpliziale Approximation.
Definition H1.2
Für jeden polygonalen Weg w = v0 v1 . . . vn in C∗ definieren wir
deg(w) :=
1
2π
n
∑
∠(vk−1 , vk ).
k=1
Beispiel H1.3
Für ∆ = [v0 , v1 , v2 ] und w = v0 v1 v2 v0 gilt
0 ̸∈ ∆ =⇒ deg(w) = 0,
0 ∈ Int ∆ =⇒ deg(w) = ±1.
109
H | Abbildungsgrad und Topologie des Rn
Lemma H1.4
Für w = v0 . . . vn mit v0 = vn gilt deg(w) ∈ Z.
Beweis:
Anschaulich: Winkel werden addiert und summieren sich zu Vielfachen von
2π.
□
Lemma H1.5
Aus w ≈ w′ folgt deg(w) = deg(w′ ).
Lemma H1.6
Jeder Polygonzug w = v0 v1 . . . vn ist kürzbar bis alle Winkel ∠(vk−1 , vk ) gleiches Vorzeichen haben.
Beweis:
□
Anschaulich klar.
Satz H1.7
Seien w = v0 v1 . . . vn und w′ = v0′ v1′ . . . vn′ ′ Polygonzüge mit v0 = v0′ und
vn = vn′ ′ . Genau dass gilt w ≈ w′ , wenn deg(w) = deg(w′ ).
Beweis:
Siehe Skizze: Unterteile, dann ist w ≈ w′ .
17.12.2013
□
Alternative Betrachtung der Umlaufzahl
{
0
)
η(u, v) := 1 (
2 sign Im(u) − sign Im(v)
dann ergibt sich deg(v0 . . . vn ) =
∑n
k=1
[u, v] ∩ R<0 = ∅
.
sonst
η(vk−1 , vk ).
Bemerkung H1.8
Für γ : [0, 1] → C∗ stetig und stückweise C 1 mit γ(0) = γ(1) gilt
∫
deg(γ) =
1
2πi
1
t=0
γ ′ (t)
γ(t) dt.
Reell betrachten wir das Vektorfeld f : R2 \ {0} → R2 → {0} mit
1
x2 +y 2 (−y, x).
f (x, y) :=
Es gilt rot(f ) = 0, aber f besitzt kein Potential. Es gilt
∫
deg(γ) =
110
1
2π
1
t=0
f (γ(t))γ ′ (t)dt
Der Abbildungsgrad | H2
H2. Der Abbildungsgrad
Für k ∈ Z haben wir φk : S1 → S1 , φ(z) = z k . Reell betrachtet gilt
φk (cos t, sin t) = (cos kt, sin kt).
Allgemeiner definieren wir φk : Rn+1 → Rn+1 durch
φk (r cos t, r sin t, x3 , . . . , xn+1 ) := (r cos kt, r sin kt, x3 , . . . , xn+1 ).
Satz H2.1 (Brouwer-Hopf)
Die Abbildung Z → [Sn , Sn ], k 7→ [φk ] (d.h. von Z zur Homotopieklasse aller
Abbildungen von Sn nach Sn ) ist bijektiv. Es gibt also eine inverse Bijektion
deg : [Sn , Sn ] → Z, deg(φk ) = k.
Beweis: (Beweis-Idee)
Simpliziale Approximation und Umläufe zählen für n = 1.
Beispiel H2.2
Für jede Matrix A ∈ GLn+1 (R) definiere fA : Sn → Sn durch fA (x) :=
(stetig). Für
E± = diag(1, ±1, 1, . . . , 1)
□
Ax
|Ax|
ist fE± = φ±1 . Also ist deg(fE±1 ) = ±1 = sign det(E± ).
Proposition H2.3
Für A ∈ GLn+1 (R) gilt deg(fA ) = sign det(A).
Beweis:
Es gilt π0 (GLn+1 (R)) = {[E+ ], [E− ]}. Jeder Weg γ : [0, 1] → GLn+1 (R) von
A nach E± definiert eine Homotopie von fA nach fE± vermöge H(t, x) =
γ(t)x
□
|γ(t)x| . Also gilt deg(fA ) = deg(fE± ) = sign det A.
Korollar H2.4
deg(f ◦ g) = deg(f ) deg(g).
Beweis:
Es gilt f ≃ φk , g ≃ φl , also f ◦ g ≃ φk ◦ φl = φkl .
□
Korollar H2.5
Ist f : Sn → Sn ein Homöomorphismus, so gilt deg(f ) = ±1.
Korollar H2.6
Es gilt Sn ̸≃ ∗.
111
H | Abbildungsgrad und Topologie des Rn
Beweis:
Es gilt [S n , ∗] = {∗}, [Sn , Sn ] ∼
= Z. Es existiert keine Bijektion zwischen {∗}
und Z, also ist ∗ ̸≃ Sn .
□
Korollar H2.7
Es gilt Sn ⊆ Dn+1 ist kein Retrakt.
Beweis:
Sei ι : Sn
Dn+1 die Inklusion. Angenommen es gäbe r : Dn+1 → Sn mit
r ◦ ι = IdSn .
Dn+1
ι≃∗
Sn
[S ,−]
===⇒
r
Id≃∗
[Sn , Dn ] = {∗}
n
Sn
ι∗
Z∼
= [Sn , Sn ]
ein Widerspruch zu Sn ̸≃ ∗, bzw. zu Z ̸∼
= {∗}.
r∗
Id∗
[Sn , Sn ] ∼
=Z
□
Satz H2.8
Sei A ⊆ Rn kompakt und Å ̸= ∅. Dann existiert keine Retraktion r : A → ∂A.
Beweis:
Angenommen r : A → ∂A wäre eine Retraktion, also stetig und r|∂A =
Id∂A . Wir können o.B.d.A. annehmen, dass 0 ∈ Å ⊆ A ⊆ Bn . Betrachte
g : Dn → Sn−1 mit
{
x
x ∈ Dn \ Å
g(x) := |x|
.
r(x)
x∈A
|r(x)|
g ist wohldefiniert, stetig und erfüllt g|Sn−1 = IdSn−1 , ein Widerspruch zu
Sn+1 ⊆ Dn ist kein Retrakt.
□
Satz H2.9 (Brouwerscher Fixpunktsatz)
Jede stetige Abbildung f : Dn → Dn besitzt (mindestens) einen Fixpunkt, d.h.
es existiert a ∈ Dn mit f (a) = a.
Beweis:
Siehe Skizze
□
H3. Satz vom Igel
Definition H3.1
Ein tangentiales Vektorfeld auf Sn ist eine Abbildung v : Sn → Rn+1 mit
⟨x, v(x)⟩ = 0.
112
Der Satz von Borsuk-Ulam | H4
Satz H3.2 (Der Satz vom gekämmten Igel)
(1) Ist n ungerade, so existiert ein nirgends verschwindendes Vektorfeld auf
Sn
(2) Für n gerade, hat jedes tangentiale Vektorfeld mindestens eine Nullstelle.
Beweis:
(1) Sei n = 2m − 1 und betrachte v : Rn+1 → Rn+1 definiert durch
v(x1 , x2 , . . . , x2m−1 , x2m ) := (−x2 , x1 , . . . , −x2m , x2m−1 ).
Dies definiert v : Sn → Rn+1 mit ⟨x, v(x)⟩ = 0.
(2) Zu v : Sn → Rn+1 betrachte H : [0, 1] × Sn → Sn definiert durch
Ht (x) :=
x+tv(x)
|x+tv(x)| .
Wenn v nirgends verschwindet, dann ist H1 (x) ̸= x für alle x. Wir
betrachten K : [0, 1] × Sn → Sn , definiert durch
Kt (x) :=
(1−t)H1 (x)−tx
|(1−t)H1 (x)−tx| .
Kt ist wohldefiniert wegen H1 (x) ̸= x und stetig. Es gilt K0 =
H
K
H1 , K1 = − Id. Dann gilt IdSn ≃ H1 ≃ − IdSn . Es gilt aber
deg(IdSn ) = 1,
deg(− IdSn ) = (−1)n+1 = −1.
Ein Widerspruch zur Homotopieinvarianz des Abbildungsgrad.
□
H4. Der Satz von Borsuk-Ulam
Wir beobachten: ist k ungerade, so gilt φk (−x) = −φk (x). Gilt nun auch die
Umkehrung?
Satz H4.1 (Borsuk-Ulam)
Sei f : Sn → Sn stetig mit f (−x) = −f (x). Dann ist deg(f ) ungerade.
Beweis:
Folgt
□
07.01.2014
Korollar H4.2
Für m > n existiert keine stetige Abbildung f : Sm → Sn mit f (−x) = −f (x).
113
H | Abbildungsgrad und Topologie des Rn
Beweis:
Angenommen f : Sm → Sn sei stetig und ungerade. Auch die Standardeinbettung ι : Sn
Sm ist ungerade. Somit ist auch g = ι◦f : Sm → Sm ungerade. Wegen deg(g) ungerade und damit insbesondere deg(g) ̸= 0 gilt g ̸≃ ∗.
Andererseits ist ι zusammenziehbar und damit auch g = ι ◦ f ≃ ∗ ◦ f = ∗,
ein Widerspruch.
□
Korollar H4.3
Ist f : Sn → Rn stetig, so existiert x ∈ Sn mit f (−x) = f (x).
Beweis:
Der Fall n = 0 ist trivial (S0 = {±1}, R0 = {0}). Der Fall n = 1 ist leicht
mit dem Zwischenwertsatz (betrachte g(x) = f (x) − f (−x)).
Angenommen f (x) ̸= f (−x) für alle x ∈ Sn . Dann wäre g(x) =
f (x)−f (−x)
n
→ Sn−1 , ein Wider|f (x)−f (−x)| eine stetig ungerade Abbildung g : S
spruch zum letzten Korollar.
□
Satz H4.4
Seien A1 , . . . , An ⊆ Rn kompakt (es reicht auch messbar und beschränkt).
Dann existiert mindestens eine affine Hyperebene H ⊆ Rn sodass µ(Ak ∩
H+ ) = µ(Ak ∩ H− ) für alle k = 1, . . . , n.
Beweis:
Setze µk (B) := µ(Ak ∩ B) und nutze den folgenden Satz.
□
Satz H4.5
Seien µ1 , . . . , µn endliche Borel-Maße, wobei jede affine Hyperebene H Maß 0
hat. Dann existiert H ⊆ Rn sodass µk (H+ ) = µk (H− ) für alle k.
Beweis:
Jeder Vektor v = (v0 , . . . , vn ) ∈ Sn definiert Halbräume
H+ (v) := {x ∈ Rn : v1 x1 + · · · + vn xn > v0 },
H− (v) := {x ∈ Rn : v1 x1 + · · · + vn xn < v0 }.
Hierbei gilt H+ (−v) = H− (v). Für v = (1, 0, . . . , 0) gilt H+ (v) =
∅, H− (v) = Rn . Wir definieren fk : Sn → R durch fk (v) = µk (H+ (v))
und erhalten f : Sn → Rn , f = (f1 , . . . , fn ). Dies Abbildung ist stetig
(Übung). Dann existiert v ∈ Sn mit f (v) = f (−v) nach letztem Korollar,
also µk (H+ (v)) = µk (H− (v)) für alle k = 1, . . . , n.
□
114
Invarianz der Dimension, des Randes und der Orientierung | H5
H5. Invarianz der Dimension, des Randes und der
Orientierung
Satz H5.1
Für m ̸= n gilt Sm ̸≃ Sn und insbesondere Sm ∼
̸= Sn .
Beweis:
Sei o.B.d.A. m > n. Angenommen Sm ≃ Sn , d.h.
Sm
IdSm
Sm
f
Sn
g
IdSn
f
.
Sn
Dann gilt g ≃ ∗ nach G3.11, also auch IdSm ≃ g ◦ f ≃ ∗, ein Widerspruch
□
zu Sm nicht zusammenziehbar (siehe H2.6).
Korollar H5.2
Für m ̸= n gilt Rm ∼
̸= Rn .
Beweis:
∼
=
Angenommen f wäre eine Homöomorphismus Rm −
→ Rn . Im Fall m = 0
m
folgt sofort n = 0, sei also m, n ≥ 1. Sei x ∈ R , y = f (x) ∈ Rn . Dann
erhalten wir
Rn \{y}
S
m−1
f |Rm \{x}
≃ R \ {x} −−−−
−−→ Rn \ {y} ≃ Sn−1
∼
m
=
also Sm−1 ≃ Sn−1 und somit m = n.
Alternativ lässt dies auch mit der Alexandroff-Kompaktifizierung beweisen:
∼
=
Widerspruch mittels des fortgesetzten Homömomorphismus fˆ : Sm −
→
n
S .
□
Satz H5.3
Sei 0 ≤ m < n. Sei U ⊆ Rn offen, x ∈ U .
(1) In jede Umgebung U von x in U existieren stetige Abbildungen f :
Sn−1 → U ′ \ {0}, die nicht zusammenziehbar sind. Kurz: [Sn−1 , U ′ \
{0}] ̸= {∗}.
(2) Hingegen existieren Umgebungen U ′ von x in U , sodass [Sm−1 , U ′ \
{0}] = {∗}.
Hierdurch wird n allein durch topologische Eigenschaften des Raumes U festgelegt.
115
H | Abbildungsgrad und Topologie des Rn
Beweis:
Es existiert r ∈ R>0 mit B(x, 2r) ⊆ U . Wir erhalten f = fx,r : Sn−1
U \{x} mit f (s) = x+rs. Wäre f nullhomotop in U , so auch die Komposition
Sn−1
f
∼
=
ι
≃
U \ {x} −
→ Rn \ {x} → Rn \ {0} → Sn−1
Das steht im Widerspruch zu deg(IdSn−1 ) = 1. Hingegen ist jede stetig Abbildung f : Sm−1 → B(x, r) \ {0} zusammenziehbar, denn
∼
=
f
Sm−1 → B(x, r) \ {x} ←
− Rn \ {0} ≃ Sn−1
v
→7 v
x + r 1+|v|
□
Satz H5.4 (Invarianz der Dimension)
Sei U ⊆ Rp offen und V ⊆ Rq offen und nicht-leer. Wenn ein Homeomorphis∼
=
mus f : U → V existiert, so gilt p = q.
13.01.2014
H6. Jordan-Schoenflies
Satz H6.1 (Jordan-Schoenflies)
Sei C ⊆ R2 eine Jordan-Kurve, d.h. C ∼
= S1 .
1) Jordan-Zerlegung: R2 \ C = A ⊔ B mit A, B offen und wegzusammenhängend, B beschränkt und A unbeschränkt.
2) ∂A = ∂B = C, A = A ∪ C, B = B ∪ C.
3) Schoenfließ: B ∼
= B2 , B ∼
= D2 .
∼
=
4) Verschärfung: ∃h : R2 −
→ R2 : h(C) = S1 .
Beweis: (für polygonale Kurven S1 ∼
= C ⊆ R2 )
Sei C = [v0 , v1 ]∪[v1 , v2 ]∪· · ·∪[vn−1 , vn ] mit vn = v0 und [vi−1 , vi [∩[vj−1 v, vj [=
∅ für alle i ̸= j.
□
1) folgt aus den Lemmas, 2) Übung.
Lemma H6.2
R2 \ C hat mindestens zwei Komponenten.
Beweis:
Es gibt f : R2 \ C → {0, 1} stetig und surjektiv:
f (x) = deg(C − x)
116
mod 2.
Jordan-Schoenflies | H6
f ist lokal konstant und damit insbesondere stetig. f ist surjektiv, beide Werte
werden angenommen.
□
Lemma H6.3
R2 \ C hat höchstens zwei Komponenten.
Beweis:
Wähle
ε < δ(C) :=
1
2
{
}
min d([vi−1 , vi ], [vj−1 , vj ]])|[vi−1 , vi ] ∩ [vj−1 , vj ] = ∅ .
Sei U := {x ∈ R2 : d(x, C) ≤ ε2 }. Es gilt U ∼
= C × [−1, 1] (Zylinder), oder
U ∼
= Möbius-Band, wobei das Möbius-Band jedoch nicht in Frage kommt
(letztes Lemma).
Wähle a, b ∈ R2 links und rechts von der Kurve in U . Jeder Punkt x ∈ R2
lässt sich jetzt entlang von U ohne C zu schneiden entweder zu a oder b
verbinden.
□
Lemma H6.4
B = B ∪ C lässt sich triangulieren.
Beweis:
Zunächst bilden die Halbebenenschnitte entlang der Kanten eine polytopale
Unterteilung und diese lässt sich durch baryzentrische Unterteilung in eine
simpliziale Unterteilung überführen.
□
Definition H6.5
Sei T eine Triangulierung von B. Ein Dreieck △ = [a, b, c] ∈ T heißt einklappbar, wenn △ ∩ C = [a, b] oder △ ∩ C = [a, b] ∪ [b, c].
Lemma H6.6
∼
=
Zu jedem einklappbarem Dreieck △ existiert h : R2 −
→ R2 mit h(B) = B \ △.
Lemma H6.7
Hat T mindestens 2 Dreiecke, so mindestens 2 einklappbare.
Beweis:
Zeige per Induktion über n = die Anzahl der Dreiecke. Für n = 2 ist die Aussage klar. Sei n ≥ 3. Jede Kante von C liegt in einem Dreieck △ = [a, b, c] ∈
T . Sei △ o.B.d.A. nicht einklappbar. Teile auf in linke und rechte Seite und
wende Induktionsvoraussetzung auf die kleineren beiden Teile an, so findet
man jeweils ein einklappbares Dreieck △′ , bzw. △′′ , die nicht △ sind. Diese
sind auch einklappbar im ursprünglichen B.
□
14.01.2014
117
H | Abbildungsgrad und Topologie des Rn
Satz H6.8 (Jordan-Brouwer-Trennungssatz)
Für Sn−1 ∼
= S ⊆ Rn hat das Komplement Rn \ S genau zwei Komponenten:
Rn \ S = A ⊔ B
mit A, B offen, zusammenhängend, B beschränkt, A unbeschränkt.
Satz H6.9 (Alexander)
Ist A kompakt, so haben für je zwei Einbettungen f, g : A
mente Rn \ f (A) und Rn \ g(A) gleich viele Komponenten.
Rn die Komple-
Satz H6.10 (Invarianz des Gebiets)
Sei U ⊆ Rn offen und f : U → Rn injektiv und stetig. Dann ist die Bildmenge
V = f (U ) offen in Rn und f : U → V ist ein Homöomorphismus.
Beweis:
Für n = 1 ist dies leicht zu zeigen mit dem Zwischenwertsatz.
Wir zeigen, dass f offen ist in jedem Punkt x ∈ U . Sei r > 0 mit B(x, 2r) ⊆
U und S := ∂B(x, r) ∼
= Sn−1 . Dann trennt C := f (S) ∼
= Sn−1 den
n
n
Raum R in zwei Komponenten R \ C = A ⊔ B wie in Jordan-BrouwerTrennungssatz Auch B ′ = f (B(x, r)) ist zusammenhängend, ebenso A′ =
Rn \ f (B(x, r)) (Satz von Alexander). Also Rn \ C = A′ ⊔ B ′ . Daraus folgt
A = A′ und B = B ′ . Insbesondere ist f (B(x, r)) in Rn offen.
□
118
I. Klassifikation der Flächen
I1. Mannigfaltigkeiten
Definition I1.1
Ein Raum M heißt lokal euklidisch der Dimension n, wenn zu jedem x ∈ M eine
∼
=
offene Umgebung U ⊆ M existiert und ein Homöomorphismus h : U −
→ Rn
Beispiel I1.2
1) Jede offene Menge M ⊆ Rn ist lokal euklidisch der Dimension n.
2) Sn ⊆ Rn+1 ist lokal euklidisch der Dimension n.
3) Dn ⊆ Rn ist nicht lokal euklidisch (jede Umgebung für Punkte auf dem
Rand sind nicht homöomorph zu Rn )
4) Die Gerade mit doppeltem Ursprung ist lokal-euklidisch, aber nicht hausdorffsch.
Wir vereinbaren für n ≥ 1:
Rn≥0 := {x ∈ Rn : x1 ≥ 0},
∂Rn≥0 := {x ∈ Rn : x1 = 0},
Int Rn≥0 := {x ∈ Rn : x1 > 0}.
Im Fall n = 0 setzen wir dagegen R0≥0 := {0}, ∂R0≥0 := ∅, Int Rn≥0 := {0}.
Definition I1.3
Sei M ein topologischer Raum, sodass
1) M hausdorffsch und
2) jede Komponente von M eine abzählbare Basis der Topologie hat (zweites
Abzählbarkeitsaxiom).
Wir nennen M eine n-Mannigfaltigkeit, wenn gilt
∼
=
3) Zu x ∈ M existiert eine offene Umgebung U ⊆ M und h : U −
→ V auf
eine offene Menge V ⊆ Rn≥0 .
119
I | Klassifikation der Flächen
Int M := {x ∈ M : ∃h : h(x) ∈ Int Rn≥0 }
∂M := {x ∈ M : ∃h : h(x) ∈ ∂Rn≥0 }
Ist M kompakt und ∂M = ∅, so heißt M geschlossen. Ist M nicht kompakt und
∂M = ∅, so heißt M offen.
Satz I1.4
Ist M ̸= ∅ sowohl m-, als auch n-Mannigfaltigkeit, so gilt m = n.
Beweis:
□
Folgt aus Invarianz der Dimension.
Definition I1.5
Ein Atlas von M ist eine Familie von Karten
h
i
A = (M ⊇ Ui −∼
→
Vi ⊆ Rn≥0 )i∈I
=
mit M = ∪i∈I Ui und Ui , Vi offen.
∼
=
Zu i, j ∈ I sei Uij := Ui ∩ Uj , Vij = hi (Uij ), hij : Vi ⊇ Vij −
→ Vji ⊆ Vj mit
−1
hij = hj ◦ hi |Vij .
Man nennt hij den Kartenwechsel von i nach j. Ein Atlas A heißt
• orientiert, wenn alle hij orientierungserhaltend sind,
• C r -glatt, wenn alle hij C r -glatt sind.
I2. Projektive Räume
Bisher haben wir meist die Sphären als Teilräume betrachtet:
Sn = {x ∈ Rn+1 : x20 + · · · + x2n = 1} ⊆ Rn+1 .
Wir können Sphären aber auch als Quotienten betrachten:
(Rn+1 \ {0})/R>0 ∼
= Sn .
(d.h jeweils zwei Vektoren in Rn+1 \ {0} werden miteinander identifiziert, wenn
sie voneinander mit einem positiven Faktor linear abhängig sind). Aber warum
und wie funktioniert das?
Rn+1 \ {0}
x
x7→( |x|
,|x|)
rv →7(v,r)
q
(Rn+1 \ {0})/R>0
120
x
x7→ |x|
∼
=
Sn × R>0
pr1
Sn
Klassifikation geschlossener Flächen | I3
I2.1. Reell-projektive Räume
Setze
RPn := (Rn+1 \ {0})/(R \ {0})
CPn := (Cn+1 \ {0})/(C \ {0})
Sei q : X := Rn+1 \{0} → RPn die Quotientenabbildung. Zu x = (x0 , . . . , xn ) ∈
X schreiben wir q(x) = [x0 : . . . : xn ]. Dies nennen wir homogene Koordinaten,
denn es gilt
[x0 : . . . : xn ] = [λx0 : . . . : λxn ]
für alle λ ∈ R \ {0}.
Bemerkung I2.1
Es gilt RPn ∼
= Sn /{±1}. Insbesondere ist damit RPn kompakt.
RPn ist eine kompakte n-Mannigfaltigkeit ohne Rand.
Beweis:
Rn+1 \ {0}
x
x7→ |x|
ι
p
q
RPn
Sn × R>0
∼
=
Sn \ {±1}
□
I3. Klassifikation geschlossener Flächen
Modellflächen
Beispiel I3.1
• F0+ = S2
• F1+ = S1 × S1
• F2+
• F3+
Dies sind zusammenhängende, kompakte 2-Mannigfaltigkeiten ohne Rand. Sie
sind zudem orientierbar (dafür steht das +). Es gibt zudem eine Familie nichtorientierbarer, geschlossener Flächen: Fg− := Fg+ /{±1}
121
I | Klassifikation der Flächen
• F0− = S2 /{±1} ist die reell-projektive Ebene,
• F1− = (S1 × S1 )±1 ist die Kleinsche Flasche.
20.01.2014
Triangulierte Modellflächen
Setze
Q0 := [−2, 2] × [−2 × 2]
Q1 := Q0 \ ([−1, 1] × [−1, 1])
g
Qg :=
∪ (Q
1
− 2 − 2g + 4k)
g≥2
k=1
und
Hg := Qg × [−1, +1] ⊆ R3
Hg nennen wir Henkelkörper vom Geschlecht g.
Satz I3.2
Für g ∈ N ist Fg+ := ∂Hg eine zusammenhängende, geschlossene, orientierbare Fläche. Es gilt χ(Fg+ ) = 2 − 2g. Auch Fg− = Fg+ /{±1} ist eine zusammenhängende, geschlossene, nicht-orientierbare Fläche. Es gilt χ(Fg− ) = 1 − g.
Satz I3.3
Sei K ein Simplizialkomplex. Die topologische Realisierung |K| ist genau dann
eine Fläche, wenn der Stern jeder Ecke eine der folgenden Formen hat:
Die Ecke liegt im Inneren mit sternförmig anliegenden Dreiecken, oder sie liegt
auf dem Rand mit sternförmig anliegenden Dreiecken.
Beweis:
Übung
Polygonmodelle Sei n ∈ N≥1 , γk : [0, 1] → S1 = ∂D2 , γk (t) = e
für k = 1, . . . , n. Sei w = w1 . . . wn ein Wort in a±1 , b±1 , c±1 , . . .
□
2πi
n (k−1+t)
Für wk = wl , identifiziere γk (t) ∼ γl (t), für wk = wk−1 identifiziere γk (t) ∼
γl (1 − t).
Definition I3.4
D2 /⟨w⟩ := D2 / ∼
Beispiel I3.5
• D2 /⟨aa−1 ⟩ ∼
= S2
• D2 /⟨aa⟩ ∼
= RP2
122
Klassifikation geschlossener Flächen | I3
• D2 /⟨aba−1 b−1 ⟩ ∼
= S1 × S1
• D2 /⟨abab−1 ⟩ ∼
= (S1 × S1 )/{±1} (Kleinsche Flasche)
Satz I3.6
D2 /⟨w⟩ ist genau dann eine geschlossene Fläche, wenn jeder Buchstabe in w
genau zweimal vorkommt.
Tritt ein Buchstabe in w zweimal mit gleichem Exponenten auf, so ist D2 /⟨w⟩
nicht-orientierbar, andernfalls orientierbar.
Beispiel I3.7 (Kanonische Beispiele)
−1
−1 −1 ∼
+
+
(1) D2 /⟨a1 b1 a−1
1 b1 . . . ag bg ag bg ⟩ = Fg , χ(Fg ) = 2 − 2g.
∼ F − , χ(F − ) = 1 − g.
(2) D2 /⟨c0 c0 . . . cg cg ⟩ =
g
g
Lemma I3.8
Jede zusammenhängende, geschlossene, triangulierte Fläche F ist homöomorph zu D2 /⟨w⟩ mit einem geeigneten Wort w.
Lemma I3.9
• Es gilt
D2 /⟨. . . aε . . . aδ . . .⟩ = D2 /⟨. . . bε . . . bδ . . .⟩,
solange a, b sonst nicht vorkommen.
• D2 /⟨w1 w2 . . . wn ⟩ ∼
= D2 /⟨w2 . . . wn w1 ⟩
• Es gilt
D2 /⟨. . . abb−1 c . . .⟩ = D2 /⟨. . . ac . . .⟩
solange b sonst nicht vorkommt.
Lemma I3.10
Jede Kreuzhaube . . . c . . . c . . . können wir gruppieren zu . . . cc . . . .
Lemma I3.11
Es gilt D2 /⟨. . . xcc . . .⟩ = D2 /⟨. . . ccx . . .⟩.
Lemma I3.12
Jeder Henkel . . . a . . . b . . . a−1 . . . b−1 . . . kann gruppiert werden zu . . . aba−1 b−1 . . . .
Lemma I3.13
D2 /⟨. . . aba−1 b−1 x . . .⟩ = D2 /⟨. . . xaba−1 b−1 . . .⟩.
Lemma I3.14
D2 /⟨. . . ccaba−1 b−1 . . .⟩ = D2 /⟨. . . ccaabb . . .⟩.
123
I | Klassifikation der Flächen
Satz I3.15
Mit obigen Umformungen kann jedes Flächenwort w überführt werden in w =
−1
−1
c1 c1 . . . ck ck a1 b1 a−1
. . . al bl a−1
1 b
l bl .
Für k ≥ 1 kann dies weiter vereinfacht werden zu w = c1 c1 . . . ck′ ck′ mit
k ′ = k + 2l.
21.01.2014
+
−
Flächen ohne Rand: Fg+ . Flächen mit r ≥ 1 Randkomponenten: Fg,r
, Fg,r
Satz I3.16 (Klassifikation kompakter Flächen)
Jede zusammenhängende kompakte Fläche F (eventuelle mit Rand) ist homöoε
morph zu genau einem der obigen Modelle Fg,r
.
Genauer gilt mit r Randkomponenten und Euler-Charakteristik χ: ist F orientierbar, so gilt ε = +, χ(F ) = 2 − 2g − r, andernfalls gilt ε = − und
χ(F ) = 1 − g − r.
Beweis:
□
Analog zum geschlossenen Fall.
Es gilt Fg+
R3 und F±
g,r
R3 für r ≥ 1, aber Fg− ̸
R3 . Warum?
Satz I3.17
Ist S ⊆ R3 eine zusammenhängende, kompakte Fläche. Ist S berandet, so ist
R3 \ S zusammenhängend. Ist S geschlossen, so gilt R3 \ S = A ⊔ B mit A, B
offen, zusammenhängend, A unbeschränkt, B beschränkt, ∂A = ∂B = S, also
A = A ∪ S, B = B ∪ S. In diesem Fall ist S orientierbar.
Beweis: (im polyedralen Fall)
Analog zum Satz von Jordan für S1 ∼
= C ⊆ R2 . Dann kann S orientiert
werden durch den von B nach außen zeigenden Normalenvektor.
□
124
Teil III.
Algebraische Topologie
125
J. Die Fundamentalgruppe
π1(X, x0)
Bisher hatten wir π0 : Top → Set, unser Ziel ist π1 : Top∗ → Grp.
J1. Das Fundamentalgruppoid π(X)
Definition J1.1
Setze
P (X) := C([0, 1], X) = {γ : [0, 1] → X stetig},
P (X, a, b) := C([0, 1], X) = {γ : [0, 1] → X stetig mit γ(0) = a, γ(1) = b}
und
(1) X
P (X) vermöge a 7→ 1a , 1a (t) = a,
(2) : P (X, a, b) → P (X, b, a), γ(t) = γ(1 − t),
(3) ∗ : P (X, a, b) × P (X, b, c) → P (X, a, c) mit
{
γ1 (2t)
0 ≤ t ≤ 21
(γ1 ∗ γ2 )(t) =
.
γ2 (2t − 1) 21 ≤ t ≤ 1
Definition J1.2
Zwei Wege α, β ∈ P (X, a, b) heißen äquivalent, geschrieben a ∼ b, wenn es
eine stetige Abbildung H : [0, 1]×[0, 1] → X mit H(0, t) = α(t) und H(1, t) =
β(t) für alle t ∈ [0, 1] und H(s, 0) = a, H(s, 1) = b für alle s ∈ [0, 1].
Wir setzen Π(X, a, b) := P (X, a, b)/ ∼.
Proposition J1.3
Die Äquivalenz von Wegen „∼“ ist eine Äquivalenzrelation.
Aus H : α ∼ β folgt H : α ∼ β, also
: Π(X, a, b) → Π(X, b, a), [α] := [α].
127
J | Die Fundamentalgruppe π1 (X, x0 )
Aus H : α ∼ α′ und K : β ∼ β ′ folgt H ∗ K : α ∗ β ∼ α′ ∗ β ′ , also
∗ : Π(X, a, b) × Π(X, b, c) → Π(X, a, c), [α] ∗ [β] := [α ∗ β].
Beweis:
Reflexivität, Symmetrie, Transitivität klar.
Inversion mit H(s, t) = H(s, 1 − t). Verknüpfung ähnlich wie oben.
□
Satz J1.4
Jeder topologische Raum X definiert eine Kategorie Π(X):
(a) Objekte sind die Punkte a, b, c ∈ X,
(b) Morphismen sind [α] ∈ Π(X, a, b),
(c) Die Verknüpfung ∗ ist die obige.
Diese Verknüpfung erfüllt also
(1) Identität: Für α ∈ P (X, a, b) gilt 1a ∗ α ∼ α ∼ α ∗ 1b also [1a ] ∗ [α] =
[α] = [α] ∗ [1b ],
(2) Assoziativität: Für α ∈ P (X, a, b) und β ∈ P (X, b, c) und γ ∈ P (X, c, d)
gilt (α ∗ β) ∗ γ ∼ α ∗ (β ∗ γ), also ([α] ∗ [β]) ∗ [γ] = [α] ∗ ([β] ∗ [γ]).
Außerdem gilt noch
(3) Inverse: Für α ∈ P (X, a, b) gilt α∗α ∼ 1a , α∗α ∼ 1b , also [α]∗[α] = [1b ]
und [α] ∗ [α] = [1b ].
Beweis:
(1) Es gilt H : 1a ∗ α ∼ α mit
{
H(s, t) =
a
0 ≤ t ≤ 1−s
2 .
2t−1+s
α( 1+s ) 1−s
≤
t
≤
1
2
Analog α ∗ 1b ∼ α.
(2) Setze
(3) Setze
128
4t
α( 1+s )
H(s, t) = β(4t − 1 − s)
4t−2−s
γ( 2−s )
0 ≤ t ≤ 1+s
4
2+s
1+s
.
≤
t
≤
4
4
2+s
4 ≤t≤1
0 ≤ t ≤ 1−s
α(2t)
2
1+s
1−s
H(s, t) = α(1 − s)
.
≤
t
≤
2
2
1+s
α(2 − 2t)
≤
t
≤
1
2
□
Die Fundamentalgruppe eines punktierten Raumes (X, x0 ) | J2
27.01.2014
J2. Die Fundamentalgruppe eines punktierten
Raumes (X, x0 )
Definition J2.1
Wir setzen
π1 (X, x0 ) := Π(X, x0 , x0 )
mit [α] · [β] := [α ∗ β].
(π1 (X, x0 ), ·) bildet eine Gruppe.
Beispiel J2.2
Betrachte
(
) ∼
=
deg : π1 (C \ {0}, 1), · −
→ (Z, +).
Dies ist ein Gruppenisomorphismus.
Verschieben des Fußpunktes
Proposition J2.3
Jeder Weg γ ∈ P (X, x0 , x1 ) induziert einen Gruppenisomorphismus
∼
=
hγ : π1 (X, x0 ) −
→ π1 (X, x1 ),
[α] 7→ [γ ∗ α ∗ γ],
hγ : π1 (X, x1 )
[β] 7→ [γ ∗ β ∗ γ].
∼
=
−
→
π0 (X, x1 ),
Ist γ ′ ∈ P (X, x0 , x1 ) ein weiterer Weg, so gilt
hγ ′ = c−1 · hγ · c
mit c = [γ ∗ γ ′ ] ∈ π1 (X, x1 ).
Beweis:
Direkt nachzurechnen.
□
Definition J2.4
X heißt einfach zusammenhängend, wenn π0 (X) = {X} und π1 (X, x0 ) = {1}.
Beispiel J2.5
Rn ist einfach-zusammenhängend, ebenso X ⊆ Rn sternförmig.
Beispiel J2.6
Sn ist wegzusammenhängend für n ≥ 1 und einfach zusammenhängend für
n ≥ 2.
129
J | Die Fundamentalgruppe π1 (X, x0 )
Beweis:
Funktioniert mit stereographischer Projektion und simplizialer Approximation.
□
Funktorialität
Lemma J2.7
Jede stetige Abbildung f : (X, x0 ) → (Y, y0 ) induziert einen Gruppenhomomorphismus f# := π1 (f ) : π1 (X, x0 ) → π1 (Y, y0 ) mit f# ([α]) = [f ◦ α].
Beweis:
□
Nachrechnen.
Satz J2.8
Wir erhalten einen (kovarianten Funktor) π1 : Top∗ → Grp.
(Y, y0 )
f
(X, x0 )
π1 (Y, y0 )
π
−
→
g
h=g◦f
(Z, z0 )
π1 (f )
π1 (X, x0 )
π1 (g)
π1 (h)
π1 (Z, z0 )
Beweis:
□
Nachrechnen.
Korollar J2.9
Angenommen f : (X, x0 ) → (Y, y0 ) ist ein Homöomorphismus, d.h. stetig und
es existiert g : (Y, y0 ) → (X, x0 ) stetig mit g ◦f = id(X,x0 ) und f ◦g = id(Y,y0 ) .
Dann ist f# : π1 (X, x0 ) → π1 (Y, y0 ) ein Isomorphismus, denn
g# ◦ f# = (g ◦ f )# = (id(X,x0 ) )# = idπ1 (X,x0 )
und f# ◦ g# = idπ1 (Y,y0 ) .
Satz J2.10
Für f, g : (X, x0 ) → (Y, y0 ) impliziert jede Homotompie H : f ≃ g relativ zu
x0
π1 (f ) = π(g) : π1 (X, x0 ) → π1 (Y, y0 ).
Beweis:
Nachrechnen.
130
□
Polygonale Fundamentalgruppe | J3
Korollar J2.11
Sind f : (X, x0 ) → (Y, y0 ) und g : (Y, y0 ) → (X, x0 ) mit g ◦ f ≃ id(X,x0 )
relativ zu x0 und f ◦ g ≃ id(Y,y0 ) relativ zu y0 , dann erfüllt f# : π1 (X, x0 ) →
π1 (Y, y0 ) und g# : π1 (Y, y0 ) → π1 (X, x0 )
g# ◦ f# = idπ1 (X,x0 ) .
f# ◦ g# = idπ1 (Y,y0 ) ,
J3. Polygonale Fundamentalgruppe
Definition J3.1
Sei V ein R-Vektorraum und x0 ∈ X ⊆ V .
pl
π1 := {Polygonzüge in (X, x0 )}/polygonale Homotopie.
Satz J3.2
Für X ⊆ Rd offen und x0 ∈ x haben wir
pl
φ : π1 (X, x0 ) → π1 (X, x0 ),
φ([w]) = [|w|],
wobei mit |w| die topologische Realisierung gemeint ist.
Beweis:
Funktioniert mit Polygonaler Approximation von Wegen und Homotopien.□
Satz J3.3
∼
=
Wir erhalten so deg : π1 (C∗ , 1) −
→ Z.
Satz J3.4
Für X = C\{0, −1, −2, . . . , 1−n} ist π1 (X, 1) frei vom Rand n, d.h. es existiert
∼
=
ψ : (X, 1) −
→ ⟨s1 , . . . , nn |−⟩.
Bemerkung
Für n = 0, X = C ist π1 (X, 1) = {1}. Für n = 1, X = C∗ ist π1 (X, 1) ∼
=
(Z, +) = (⟨s1 |−⟩, ·).
Beweis:
Ähnliche Idee wie bei der Umlaufzahl: zähle Übergänge auf der negativen
reellen Achse zwischen den Segmenten im jeweiligen Erzeuger s1 , . . . , sn .
Für [u, v] ⊆ X, setze
{
1
η(u, v) =
sεk
[u, v] ∩ R<0 = ∅
[u, v] ∩ Sk ̸= ∅
131
J | Die Fundamentalgruppe π1 (X, x0 )
wobei ε := 12 [sign Im u − sign Im v]. Setze jetzt
η(v0 v1 v2 . . . vn−1 vn ) := η(v0 v1 ) · η(v1 v2 ) · · · · · η(vn−1 vn )
pl
und ψ : π1 (X, 1) → ⟨s1 , . . . , sn |−⟩ mit ψ([w]) = η(w).
Dies ist ein Gruppenhomomorphismus (surjektiv, injektiv: nachrechnen und
Induktion).
□
Beispiel J3.5
Sei X = C \ {0, 1}.
−1
Es gilt s1 s−1
2 ̸≃ s2 s1 .
J4. Simpliziale Fundamentalgruppe
Definition J4.1
Sei K ein Simplizialkomplex mit Eckenmenge Ω und x0 ∈ Ω. Sei |K| ⊆ R(Ω)
die topologische Realisierung und
π1 (K, x0 ) :=
{Kantenzüge in (|K|, x0 ) mit Eckenmenge Ω}
.
polygonaler Homotopie
Satz J4.2
∼
=
Wir haben φ : π1 (K, x0 ) −
→ π1 (|K|, x0 ) mit φ([w]) = [|w|].
Beweis:
Funktioniert mit simplizialer Approximation.
□
Beispiel J4.3
Betrachte S1 ∼
= |K| mit
{
}
K = {a}, {b}, {c}, {a, b}, {b, c}, {c, a} .
Wege auf S1 können wir also als Wörter in Ω darstellen.
Satz J4.4
Für jeden Baum T gilt π1 (T, x0 ) = {1}.
Beweis:
|T | ≃ ∗.
□
Satz J4.5
Sei K ein zusammenhängender Graph, T ⊆ K ein Spannbaum von K und x0
ein Ecke.
132
Simpliziale Fundamentalgruppe | J4
Dann ist π1 (|K|, x0 ) frei über |K \ T | Erzeugern, genauer existiert ein Isomorphismus
ψ : π1 (|K|, x0 ) → F := ⟨S|R⟩
mit Erzeugern
S = {sab |{a, b} ∈ K \ T }
und Relationen
{
}
R = sab sba |{a, b} ∈ K \ T } .
Beweis:
Ähnlich wie für C \ {0, −1, . . . , 1 − n}.
□
28.01.2014
J4.1. Anwendung auf berandete Flächen
+
Für einen passenden Graphen K ist |K| zu Fg,r
homotopie-äquivalent. Es gilt
+
⟨a1 , b1 , . . . , ag , bg , d2 , . . . , dr |−⟩ ≃ π1 (|K|, x0 ) ≃ π1 (Fg,r
, x0 ),
wobei a, b, d jeweils Kanten im Henkel sind (durch Wegnehmen entsteht ein
Baum).
Genauso
−
π1 (Fg,r
) ≃ ⟨c0 , . . . , cg , d2 , . . . , dr |−⟩.
Satz J4.6
Sei K ein zusammenhängender Simplizialkomplex, T ⊆ K ein Spannbaum und
∼
=
x0 eine Ecke. Dann haben wir ψ : π1 (K, x0 ) −
→ G = ⟨S|R⟩ mit Erzeugern
S = {sab |{a, b} ∈ K} und Relationen
{
}
R = {sab |{a, b} ∈ T } ∪ sab sba , aab sbc sca |{a, b, c} ∈ K .
Beweis:
Wir wohldefinieren ψ : π1 (K, x0 ) → G durch
π([v0 v1 . . . vn−1 vn ]) = sv0 v1 sv1 v2 · · · svn−1 svn
und φ : G → π1 (K, x0 ) durch
φ(sab ) = x0 · · · a ∗ab ∗ b · · · x0 .
| {z }
| {z }
in T
Wir prüfen φ ◦ ψ = id und ψ ◦ φ = id.
in T
□
133
J | Die Fundamentalgruppe π1 (X, x0 )
Satz J4.7
Es existieren Gruppenisomorphismen
∼
−1
−1 −1
=
π1 (Fg+ , x0 ) −
→ ⟨a1 b1 , . . . , ag bg |a1 b1 a−1
1 b1 . . . ag bg ag bg ⟩,
∼
=
π1 (Fg− , x0 ) −
→ ⟨c0 , c1 , . . . , cg |c0 c0 c1 c1 · · · cg cg ⟩.
Beweis:
−1
−1 −1
Betrachte Fg± = D2 /⟨w⟩ mit w = a1 b1 a−1
1 b1 · · · ag bg ag bg , bzw. w =
1
2
1
c0 c0 c1 c1 · · · cg cg . Wir triangulieren S ⊆ D , sowie S /⟨w⟩ ⊆ D2 ⟨w⟩. Sei
L ⊆ K dieser Komplex. π1 (|L|, x0 ) ≃ ⟨a1 , b1 , . . . , ag , bg |−⟩. Wähle ein Dreieck △ ∈ K, setze K ′ := K \ {△}. Wir haben eine Homotopie-Äquivalenz
zwischen |L| und |K ′ |.
Der Kantenweg w′ = x0 · · · a ∗ abc∗ c · · · x0 in K ′ entspricht w in L, genauer
r# ([w′ ]) = [w].
∼
∼
inc
#
=
=
⟨a1 , b1 , . . . , ag , bg |−⟩ −
→ π1 (|L|, x0 ) −
→ π1 (|K ′ |, x0 ) −−→
π1 (|K|, x0 ),
wobei inc# Quotient mit w als einzige Relation.
□
Beispiel J4.8
• F0− = RP2 und π1 (RP2 , x0 ) ≃ Z/2.
• F1+ = S1 × S1 (Torus). π1 (F1+ , x0 ) = ⟨a, b|aba−1 b−1 ⟩, d.h. aba−1 b−1 = 1,
also ab = ba. Somit ist π1 (F1+ , x0 ) ∼
= Z × Z.
J4.2. Abelsch-Machung
Es gilt
⟨
π1 (Fg+ )ab
⟩
[a1 , b1 ] = · · · = [ag , bg ] = 1,
= a1 , b1 , . . . , ag , bg [ai , aj ] = [ai , bj ] = [bi , bj ] = 1
⟨
⟩
= a1 , b1 , . . . , ag , bg [ai , aj ] = [ai , bj ] = [bi , bj ] = 1
∼
= Z2g .
und
π1 (Fg− )ab = ⟨c0 , c1 , . . . , cg |c20 c21 . . . c2g = 1, [ci , cj ] = 1⟩
∼
= /⟨2c0 + 2c1 + · · · + 2cg = 0⟩
∼
= Z/2 × Zg .
134
Simpliziale Fundamentalgruppe | J4
Satz J4.9
Die Gruppen π1 (Fg± , x0 ) sind untereinander nicht isomorph, d.h. aus π1 (Fgε ) ∼
=
π1 (Fhδ ) folgt (g, ε) = (h, δ).
Korollar J4.10
Aus Fgε ∼
= Fhδ folgt (g, ε) = (h, δ).
Bemerkung
Hieraus folgt insbesondere, dass χ(Fgε ) eine topologische Invariante ist.
Korollar J4.11
Aus Fgε ≃ Fhδ folgt (g, ε) = (h, δ).
J4.3. Projektive Räume
Wir kennen RPn = Sn /{±1} und π1 (S1 , 1) ∼
= Z/2.
RP1 = S1 /{±1} ∼
= S1 ,
RP2 = S2 /{±1},
π1 (S1 , 1) ∼
= Z;
2
π1 (RP , x0 ) ∼
= Z/2;
RP3 ,
..
.
π1 (RP3 , x0 ) ∼
= Z/2;
..
..
.
.
Für orthogonale Gruppen
SO2 R ∼
= S1 ,
SO3 R ∼
= RP3 ,
π1 (SO2 R, 1) ∼
= Z;
π1 (SO3 R, 1) ∼
= Z/2.
135
K. Überlagerungen
03.02.2014
K1. Überlagerungen
Definition K1.1
Seien X, X̃ topologische Räume, p : X̃ → X surjektiv. Eine offene Menge
U ⊆ X wird durch p trivial überlagert, wenn Ũ = p−1 (U ) = ⊔i∈I Ũi disjunkte Vereinigung von offenen Mengen Ũi ⊆ X̃i ist, sodass für jedes i ∈ I die
→ Ui ein Homöomorphismus ist.
Einschränkung pi = p|U
Ũ
i
X̃
p
X
Die Abbildung p heißt Überlagerung, wenn jeder Punkt x ∈ X eine offene Umgebung U ⊆ X besitzt, die von p trivial überlagert wird.
Sie heißt n-blättrig, wenn |p−1 (x)| = n für alle x ∈ X. Sie heißt trivial, wenn
ganz X trivial überlagert wird.
Bemerkung
p ist insbesondere stetig. Die Anzahl der Blätter ist für jede Zusammenhangskomponente konstant.
Beispiel K1.2
• idX : X → X ist eine Überlagerung, ebenso jeder Homöomorphismus
∼
=
p : X̃ −
→ X.
• q : X × F → X mit q(x, y) = x und diskreter Faser F = q −1 (x) für alle
x ∈ X.
• p : X̃ = [−1, 1] → X = [0, 1], p(x) = x2 . Dies ist keine Überlagerung,
denn die Blätterzahl ist nicht konstant.
• p∗ : X̃ = [−1, 1] \ {0} → X = [0, 1] \ {0}, p∗ (x) = x2 ist eine Überlagerung.
• p : D2 → D2 mit p(z) = z 2 ist keine Überlagerung, denn die Blätterzahl ist
nicht konstant. Hingegen ist p : D2 \ {0} → D2 \ {0}, p(z) = z 2 ist eine
137
K | Überlagerungen
nicht-triviale Überlagerung.
∑∞
zk
k=0 k! .
• exp : (C, +) → (C∗ , ·), exp(z) =
Es gilt ker(exp) = 2πiZ.
p : (R, +) → (S , 1), p(t) = e = (cos t, sin t). Es gilt ker(p) = 2πZ.
1
it
x+iy →7(x,y)
C
R×R
exp
C∗
exp
(x,y)7→(e ,e )
rs→7(r,s)
R
C
x
iy
C∗
R>0 × S1
q
p
C/2πiZ S1
∼
=
∼
=
R/2πZ
• Komplexe Wurzeln
C
u
u7→w=e n
C∗
u7→eu
pn :w7→wn
C∗
• Geometrische Beispiele
– q : Sn
– q:
Fg+
RPn = Sn /{±}
Fg− = Fg+ /{±}
p
– Graph, Y → X, X = Y /{±} (zweiblättrig) χ(X) = −1, χ(Y ) = −2
q
Graph, Z → X (dreiblättrig, aber Z) χ(Y ) = −3
Ebenso für Flächen.
• Sei p : C → C eine Polynomabbildung, p(z) = z n + a1 z n−1 + · · · + an mit
a1 , . . . , an ∈ C, n ≥ 1. Dann ist p surjektiv und außerhalb der kritischen
Werte eine n-blättrige Überlagerung.
Definition K1.3
Sei G eine Gruppe und X eine Menge. Eine Linksoperation von G auf X ist
eine Abbildung φ : G × X → X, geschrieben (g, x) 7→ g · x = gx, sodass
1x = x, g(hx) = (gh) · x.
Die definiert x ∼ y durch ∃g ∈ G : y = gx. Für x ∈ X heißt Gx := {gx : g ∈
G} die Bahn von x unter G. Der Bahnenraum ist G
X := {Gx : x ∈ X}, kurz
φ
G→X
q
GX.
Beispiel K1.4
1) (R, +) operiert auf C durch φ : R × C → C, (t, z) 7→ e2πit · z.
138
Hochhebung von Wegen | K2
2) (R, +) operiert auf C durch ψ : R × C → C, (t, z) 7→ t + z.
3) T = 2πiZ operiert auf C durch T × C → C, (t, z) 7→ t + z.
4) (Z2 , +) operiert auf C durch Z2 × C → C, (t, z) 7→ t + z.
Definition K1.5
Die Operation φ : G×X → X heißt stetig, wenn für jedes g ∈ G die Abbildung
φg : X → X, x 7→ gx stetig ist (also mit φg−1 = φ−1
g ein Homömmorphismus).
Die Operation φ heißt frei, wenn gx ̸= x für alle g ∈ G \ {1} und alle x ∈ X.
Die Operation φ heißt frei diskontinuierlich, wenn jeder Punkt x ∈ X eine
Umgebung U ⊆ X besitzt, sodass U ∩ gU = ∅ für alle g ∈ G \ {1}.
Satz K1.6
φ
q
Sei G → X → X := G
X̃ eine freie diskontinuierliche Operattion. Dann ist q eine Überlagerung.
Beweis:
□
Klar aus Definition.
04.02.2014
K2. Hochhebung von Wegen
Das Hochebungsproblem sucht f˜ in dem folgenden Diagramm:
(X̃, x̃0 )
f˜
(W, w0 )
f
p
(X, x0 )
Satz K2.1
Sei p : (X̃, x̃0 ) → (X, x0 ) eine Überlagerung. Zu jeder stetigen Abbildung
f : ([0, 1]n , 0) → (X, x0 ) existiert genau eine Hochhebung f˜ : ([0, 1]n , 0) →
(X̃, x̃0 ) stetig mit p ◦ f˜ = f .
Beweis:
Folgende Skizze mit Kompaktheit und Lebesgue-Zahl. Für beliebiges n per
Induktion.
□
Anwendung auf Wege und Homotopien
139
K | Überlagerungen
Satz K2.2
Jede Überlagerung p : (X̃, x̃) → (X, x) induziert Bijektionen
P (X̃, x̃)
quot
Π(X̃, x̃)
Pb P#
P (X, x)
Pb P#
quot
Π(X, x)
mit P# (α̃) = p ◦ α̃, Pb (α) = α̃ (Hochebung von Wegen), bzw. P# ([α̃]) = [p ◦
α̃], Pb ([α]) = [α̃] (Hochhebung von Homotopien).
Korollar K2.3
Der Gruppenhomomorphismus p# : π1 (X̃, x̃) → π1 (X, x) ist injektiv.
Beispiel K2.4
π1 (K, a) ∼
= ⟨s, t|−⟩π1 (K̃, ã) ∼
= ⟨s1 , s2 , t1 |−⟩
p# : π1 (K̃, ã) → π1 (K, a)
s1 7→ s
s2 7→ t−1 st
t1 7→ t2
Das heißt, die freie Gruppe ⟨s, t, |−⟩ von Rang 2 hat als freie Untergruppe
⟨s, t−1 st, t2 ⟩ vom Rang 3.
Satz K2.5
Sei p : X̃ → X eine Überlagerung. Zu jedem Weg α : ([0, 1], 0) → (X, x)
und x̃ ∈ p−1 (x) existiert genau eine Hochhebung α̃ : ([0, 1], 0) → (X̃, x̃). Wir
setzen x̃ · [α] := α̃(1). Dies ist wohldefiniert und erfüllt x̃ · [1x ] = x̃, sowie
(x̃ · [α]) · [β] = x̃ · ([α] · [β]).
Beispiel K2.6
Betrachte p : R → S1 , p(t) = e2πit . Hebe α : ([0, 1], 0) → (S1 , x) hoch zu
α̃ : ([0, 1], 0) → (R, x̃) mit p ◦ α̃ = α, d.h. α(t) = e2πitα̃(t) .
α̃(t) − α̃(0) misst die Winkeländerung, x̃ · [α] = x̃ + deg(α).
Korollar K2.7
G := π1 (X, x0 ) operiert auf F = p−1 (x0 ) durch F × G → F mit (x̃, [α]) 7→
x̃ · [α].
140
Hochhebung von Wegen | K2
Satz K2.8
∼
=
Für p : (R, 0) → (S1 , 1) mit p(t) = e2πit erhalten wir deg : π1 (S1 , 1) −
→Z
durch 0 · [α] = deg([α]).
Satz K2.9
∼
=
Für q : S2 → RP2 , q(x) = {±x} erhalten wir h : π1 (RP2 , x0 ) −
→ {π1} ∼
= Z/2
durch x̃0 · [α] = h([α]) · x̃0 .
Satz K2.10
φ
q
Für jede Überlagerung G → X̃ → X gilt:
1) die Operation von G kommutiert mit dem Fasertransport durch Π(X):
(g · x̃) · [α] = g · (x̃ · [α]).
2) für jeden Basispunkt x̃0 ∈ x und x0 = q(x̃0 ) haben wir einen Gruppenhomomorphismus h : π1 (X, x0 ) → G mit x̃0 · [α] = h([α])x̃0 .
3) Ist X̃ wegzusammenhängend, so ist h surjektiv.
{
}
im(h) = g ∈ G|x̃0 und gx̃0 sind in X̃ verbindbar
4) Ist X̃ einfach wegzusammenhängend, so ist h bijektiv.
(
)
ker(h) = q# π1 (X̃, x̃0 )
Ist also X̃ wegzusammenhängend, sohaben wir die kurze exakte Sequenz, d.h.
q#
h
1 → π1 (X̃, x̃0 ) −→ π1 (X, x0 ) −
→G→1
mit q# injektiv, h surjektiv, ker(h) = im(q# ).
Beispiel K2.11
φ
q
Z−
→ (R, 0) → (S1 , 1), q(t) = e2πit
q#
π1 (R, 0)
π1 (S1 , 1)
h
Z
∼
=
Z
0
Z
Beispiel K2.12
Sn q
{±1} −→
RPn Für n ≥ 2:
π1 (Sn , x̃0 )
∼
=
0
q#
π1 (RPn , x0 )
h,∼
=
{±1}
∼
=
∼
=
Z/2
Z/2
141
K | Überlagerungen
Für n = 1:
q#
π1 (S1 , x̃0 )
π1 (RP1 , x0 )
·2
{±1}
∼
=
∼
=
Z/2
Z/2
∼
=
Z
h,∼
=
Beispiel K2.13
(
)
ρ
− sin(2πt)
Z → R → SO2 , ρ(t) = cos(2πt)
sin(2πt) cos(2πt)
ρ#
π1 (R, 0)
π1 (SO2 , 1)
h,∼
=
∼
=
∼
=
∼
=
Z
0
{±1}
Z
Beispiel K2.14
{±1} → S3 → SO3
ρ#
π1 (S3 , 1)
π1 (SO3 , 1)
{±1}
∼
=
∼
=
Z/2
Z/2
∼
=
0
h,∼
=
K3. Galois-Korrespondenz
Beispiel K3.1
∼
=
deg : π1 (S1 , 1) −
→ Z. Untergruppen von Z: {0} und nZ für n ∈ N≥1 .
pn : (S1 , 1) → (S1 , 1), z 7→ z n ,
p0 : (R, 0) → (S , 1), t 7→ e
1
2πit
im(pn )# = nZ
,
im(pn )# = 0
Satz K3.2
Zu X zusammenhängend und lokal einfach zusammenhängend existiert eine
q
universelle Überlagerung G → X̃ → X, d.h. π0 (X̃) = {X̃} und π1 (X̃, x̃0 ) =
∼
=
{1}, also h : π1 (X, x0 ) −
→ G.
Jede zusammenhängende Überlagerung p : (Y, y0 ) → (X, x0 ) definiert eine
Untergruppe im(p# ) < G.
Zu jeder Untergruppe U < G existiert p : (Y, y0 ) → (X, x0 ) mit im(p# ) = U .
Diese Überlagerung ist eindeutig bis auf Isomorphie.
142
Vorlesungen
14.10.2013, 7
15.10.2013, 12
21.10.2013, 19
22.10.2013, 24
28.10.2013, 31
29.10.2013, 37
04.11.2013, 42
05.11.2013, 49
11.11.2013, 53
12.11.2013, 57
18.11.2013, 63
19.11.2013, 68
25.11.2013, 72
26.11.2013, 79
02.12.2013, 84
03.12.2013, 89
09.12.2013, 97
10.12.2013, 103
16.12.2013, 107
17.12.2013, 110
07.01.2014, 113
13.01.2014, 116
14.01.2014, 117
20.01.2014, 122
21.01.2014, 124
27.01.2014, 129
28.01.2014, 133
03.02.2014, 137
04.02.2014, 139
143