∑ ∑
Werbung

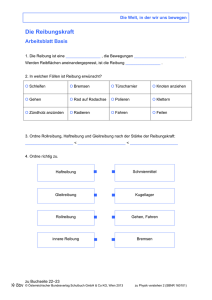
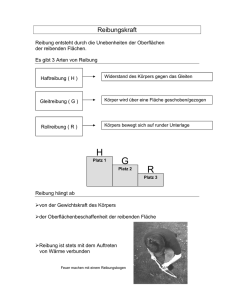
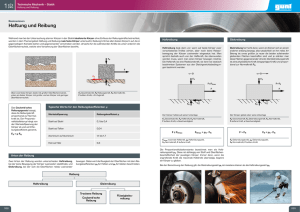
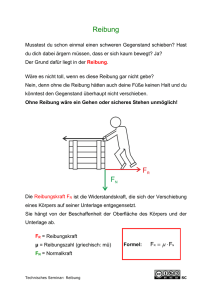
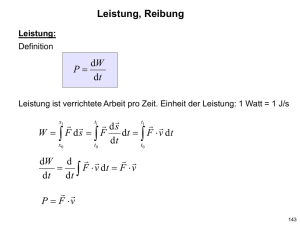
2.3. Das statische Gleichgewicht: Kräfte Drehmomente Greifen mehrere Kräfte F an einem Körper an, so lassen sie sich vektoriell zu einer Gesamtkraft addieren. Kräfte, deren vektorielle Summe verschwindet, lassen einen Körper in Ruhe. Wir betrachten einen in 0 (Koordinatenursprung) drehbar gelagerten Körper: Wenn der Körper K im Punkt 0 drehbar gelagert ist, wird die Wirkung der Kraft Fges umso größer sein, je größer die Kraft selbst ist und je größer der wirksame Kraftarm r ist. Definition des Drehmoments M: Drehmoment Kraft wirksamer Kraftarm M F M rx F M Nm r F r sin (5) Greifen mehrere Drehmomente an K an, dann können sie vektoriell zu einem Gesamtdrehmomentaddiert werden (Superpositionsprinzip, Kräfteparallelogramm(e)). Es gilt: Ein Körper befindet sich im statischen Gleichgewicht, wenn die vektorielle Summe aller angreifenden Kräfte und Drehmomente verschwindet. Fges Fi 0 i (6) M ges M i 0 i Experiment: Hebelgesetz, Drehmomente, Gleichgewichte stabile labile indifferente Gleichgewichte V 4 / 1111 V 3 / 2101 V 3 / 2102 V 3 / 2108 V 4 / 0001 Beim stabilen Gleichgewicht bewegt sich der Körper nach kleinen Störungen infolge von einwirkenden Kräften immer wieder in die Gleichgewichtslage zurück. Er führt dabei Schwingungen um die ehemalige Ruhelage aus. Beim labilen Gleichgewicht verlässt der Körper bei einer Störung sofort die (vorher instabile) Ruhelage und kehrt nicht mehr dorthin zurück. Beim indifferenten Gleichgewicht wechselt der Körper unter dem Einfluss von Kräften in eine neue Gleichgewichtslage. 2.4. Dichte und Massenmittelpunkt Körper unterschiedlicher Stoffe mit gleichen Massen besitzen i.A. unterschiedliche Volumina. Die Stoffe werden charakterisiert durch die Stoffeigenschaft Dichte. Definition: mittlere Dichte Dimension: Masse des Körpers m Volumen des Körpers V (7) kg m3 Bei vielen Körpern ist die Dichte an verschiedenen Stellen unterschiedlich: x, y, z . Solche Körper heißen inhomogene Körper. Man muss eine lokale Dichte r x, y, z definieren: x, y , z dm dV (8) Die Gesamtmasse des Körpers berechnet sich dann nach: m Körper dm x, y, z dV x, y, z dxdydz (9) V Bei der Beschreibung der Bewegung von Körpern kann man die Verteilung der Masse auf ein ausgedehntes Volumen oft außeracht lassen und sie sich in einem Punkt konzentriert denken: dem Massenmittelpunkt MMP (Konzept des Massenpunktes). Der MMP besitzt darüber hinaus bei vielen mechanischen Problemen eine ausgezeichnete Bedeutung. Seine Lage (Ortskoordinaten) lässt sich experimentell und (zumindest in einfachen Fällen) rechnerisch bestimmen. Wir betrachten zunächst den eindimensionalen Fall: An einer masselosen Stange sind an den Stellen xi die Masse mi befestigt. Die Koordinate des Massemittelpunktes ergibt sich als gewichtetes Mittel aller Koordinaten xi xs m3 m1 m2 x1 x2 x3 m1 m2 m3 m1 m2 m3 m1 m2 m3 oder allgemein n xs i 1 mi m j 1 (10) xi n j Beim 3D-Fall gilt analoges für die Koordinaten y und z. Vektoriell zusammengefasst ergibt sich als Ortsvektor des Massemittelpunktes R R m r m r M m i i i (11) i j r xi , yi , zi R xs , ys , zs M mj Gesamtmasse Experimente: Schwerpunktmodelle V3/1501 V3/1502 V3/1503 Im Falle der kontinuierlichen Masseverteilung wird dieser gedanklich in (kleine) Massenelemente dm aufgeteilt. Aus der Summation über einzelne Massepunkte wird dann eine Integration über den gesamten Köper R 1 M m0 lim r i mi 1 rdm M (12) Mit Hilfe der Dichte ergibt sich ein Volumenintegral dm dV , wenn const R 1 r dV M (13) Beispiel zur Bedeutung des Massemittelpunktes: masselose Stange mit den zwei Massen m1 und m2 Frage: An welchen Stellen xs müsste eine Gegenkraft F an der Stange angreifen, die der gesamten Gewichtskraft G G1 G2 das Gegengewicht hält und den Gesamtkörper in der waagerechten Lage belässt? Die Gegengewichtsbedingungen (vgl. Gleichung (2.7)) fordern: - für die Kräfte: F 0 und i i - für die Drehmomente: M i D.h. für unser Beispiel: i 0 F G1 G2 und G1 xs x1 G2 x2 xs oder xs x1G1 x2G2 x1 m1 g x2 m2 g m1 x1 m2 x G1 G2 m1 g m2 g m1 m2 Die Koordinaten des Angriffspunktes xs der Kraft F muss also gerade die des Massemittelpunktes (Schwerpunktes) sein! Allgemein: Im Gleichgewicht kann die Resultierende paralleler Kräfte im Massemittelpunkt angreifend gedacht werden bzw. ein im Massemittelpunkt (SP) unterstützender Körper ist in jeder Lage im statischen Gleichgewicht. 2.5. Reibungskräfte zwischen festen Körpern Die Reibung ist wichtig für viele Bewegungsabläufe. Ohne Reibung könnte man nicht laufen, fahren, bremsen. Reibung bei Bewegung(en) in Flüssigkeiten und Gasen wird als innere Reibung bezeichnet. Reibung zwischen festen Körpern heißt äußere Reibung. Die mit der äußeren Reibung verbundenen mikrophysikalischen Vorgänge sind äußerst kompliziert. Was geschieht auf nanoskaliger und atomarer Ebene? Hier sollen nur phänomenologische Beziehungen betrachtet werden; diese sind oft nur näherungsweise gültig. Die Newton‘schen Axiome 1 und 2 sind Idealisierungen; im täglichen Leben beobachtet man anderes. Nach dem Trägheitsprinzip sollte ein auf waagerechter Ebene rutschender Körper seine Geschwindigkeit für immer beibehalten. Tatsächlich kommt der Körper aber früher oder später zur Ruhe. Nach dem Aktionsprinzip sollte eine beliebig kleine Kraft einen Körper in Bewegung setzen können. Ist jedoch Reibung mit im Spiel, dann vermag eine beliebig kleine Kraft keineswegs den Körper zu bewegen bzw. zu beschleunigen. 2.5.1. Haftreibung: Ein Körper haftet auf seiner Unterlage. Es gibt nie ganz glatte Oberflächen, sondern immer mikroskopische Verhakungen. Kräfte, die kleiner sind als die Haftreibungskraft, lassen den Körper in Ruhe, siehe dazu die Skizze an der Tafel. • Der Körper „antwortet“ in diesem Falle nach dem Gegenwirkungsprinzip mit einer gleich großen Gegenkraft (actio = reactio). Experimente: FHR FHR Auflagefläche Haftreibung unabhängig von der Größe der Auflagefläche FHR Normalkraft Haftreibung ist proportional zur Normalkraft FHR H FN (14) H : Haftreibungskoeffizient Bis hierher am 03.12.2015, Ende der 8. Vorlesung ################################################################################## Der Haftreibungskoeffizient H lässt sich z.B. an einer schiefen Ebene ermitteln: Winkel, deren Schenkel paarweise aufeinander stehen, sind gleich. Man misst den Neigungswinkel max , bei dem der Körper gerade zu gleiten beginnt. Hangabtriebskraft: FH FHR G sin max Normalkraft: FN G cos max Aus FHR H FN folgt: H tan max Experimente: Klotz auf Wagen auf geneigter Ebene Schüttkegel aus verschiedenen Materialien H : spezifisch für bestimmte Stoffpaarungen und Oberflächen MH Stahl/Stahl 0,5 (trocken) 0,1 (ölschmierig) Glas/Glas 0,9 Eis/Eis (-10°C) 0,3 2.5.2. Gleitreibung Nach Überwindung der Haftreibung gleitet der Körper mit der Geschwindigkeit v . Dazu bedarf es der Kraft F , um diese Geschwindigkeit aufrecht zu erhalten. Die ihr entgegengesetzt gerichtete und betragsmäßig gleich große, von der Reibung herrührende Kraft heißt: Gleitreibungskraft FGR . Nährungsweise ist diese geschwindigkeitsunabhängig FGR G FN mit G H (15) Die Richtung von Reibungskräften ist immer entgegengesetzt zur Bewegungsrichtung des Körpers. 2.5.3. Rollreibung Ohne Haftreibung könnte ein Rad auf seiner Unterlage nicht rollen, sondern nur gleiten. Die Rollreibung hat ihre Ursache in der Deformation von Rad und Unterlage (an der Kontaktstelle). Beide sind keine ideal festen starren Körper. FRR R FN (16) Mitunter berücksichtigt man, dass die Rollreibung vom Radius des Rades abhängen muss. Bei gleicher Normalkraft drückt sich ein kleines Rad tiefer in die Unterlage als ein großes. Die die Bewegung hemmende Reibungskraft muss also für ein kleines Rad größer sein. Eine relativ gute Annäherung an die praktische Realität gelingt mit einer entsprechend aufgestellten Beziehung. l FRR FN r l: charakteristische Rollreibungslänge r: Radius des Rades MR Autoreibung auf Asphalt 0,025 Stahl auf Stahl 0,003 2.5.4. Seilreibung Experimente: Seilreibung an der Rolle, siehe auch Tafelbild(er) l 5 104 m