Numerik des 2D Transports von geladenen Teilchen in fluktuirenden
Werbung

Fachbereich Mathematik / Informatik
Fach Angewandte Systemwissenschaft
Numerik des 2-D-Transports von
geladenen Teilchen in fluktuierenden
Magnetfeldern
Diplomarbeit
von Florian Lampa
Betreuer:
Prof. Dr. May-Britt Kallenrode
Universität Osnabrück, Fachbereich Physik
Akad. Direktor i. R. Klaus Brauer
Universität Osnabrück, Fachbereich Mathematik / Informatik
Osnabrück, den 09. November 2006
Inhaltsverzeichnis
1 Einführung
5
2 Grundlagen
2.1 Definition wichtiger physikalischer Größen . . . . . . .
2.1.1 Der Pitchwinkel . . . . . . . . . . . . . . . . . .
2.1.2 Magnetische Steifigkeit . . . . . . . . . . . . . .
2.1.3 Magnetisches Moment . . . . . . . . . . . . . .
2.1.4 Grundgleichungen des Elekromagnetismus . . .
2.1.5 Wichtige Meßgrößen im interplanetaren Raum
2.2 Transportprozesse in Plasmen der inneren Heliosphäre
2.2.1 Konvektion . . . . . . . . . . . . . . . . . . . .
2.2.2 Fokussierung . . . . . . . . . . . . . . . . . . .
2.2.3 Resonanzstreuung . . . . . . . . . . . . . . . .
3 Partielle Differentialgleichungen
3.1 Klassifikation und analytische Lösungswege
3.2 Numerik . . . . . . . . . . . . . . . . . . .
3.2.1 Übergang zu finiten Differenzen . . .
3.2.2 Konsistenz . . . . . . . . . . . . . .
3.2.3 Stabilität eines Differenzenverfahrens
3.2.4 Additives Differenzen-Verfahren . .
4 Gleichungen interplanetaren Transports
4.1 Transport nach Roelof . . . . . . . .
4.2 Numerische Behandlung . . . . . . .
4.3 Erweiterter Transport nach Ruffolo .
4.4 Implementation in GREF . . . . . .
.
.
.
.
5 Einführung von Querdiffusion
5.1 Bisherige Entwicklung . . . . . . . . .
5.2 Erweiterte Transportgleichung . . . .
5.3 Numerische Behandlung . . . . . . . .
5.3.1 Wahl des Differenzenverfahrens
5.3.2 Anfangs- und Randbedingungen
5.3.3 Konsistenz . . . . . . . . . . .
5.3.4 Stabilität . . . . . . . . . . . .
5.3.5 Lösungsverfahren . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
7
8
8
9
11
12
14
15
15
.
.
.
.
.
.
21
21
24
24
26
26
32
.
.
.
.
35
35
37
40
42
.
.
.
.
.
.
.
.
47
47
49
53
53
56
58
60
65
3
5.4
Implementation in gref . . . . . . . .
5.4.1 Zusätzliche Parameter . . . . .
5.4.2 Differenzenschemata . . . . . .
5.4.3 Auswertungs- und Plotroutinen
.
.
.
.
.
.
.
.
.
.
.
.
6 Validierung und Tests
6.1 Analyse des Querdiffusionsschemas . . . . .
6.1.1 Konservatives Verfahren ? . . . . . .
6.1.2 Vergleich mit analytischer Lösung .
6.2 Querdiffusion im homogenen Magnetfeld . .
6.3 Fits an Intensitäts- und Anisotropieverläufe
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
68
68
70
71
.
.
.
.
.
73
73
73
74
78
80
7 Schlußfolgerungen und Ausblick
A Anhang
A.1 Physikalische Größen und Symbolverzeichnis . . .
A.2 Programmiertechnische Hinweise . . . . . . . . . .
A.2.1 Portierung von f77- auf f95-Standard . . . .
A.2.2 Compilerwahl . . . . . . . . . . . . . . . . .
A.2.3 Installation . . . . . . . . . . . . . . . . . .
A.2.4 Protokollierte Änderungen am Quellcode des
B Abbildungsverzeichnis
87
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
Programms gref
89
90
91
91
92
94
95
97
1 Einführung
Der Transport von energiereichen, geladenen Partikeln im interplanetaren Magnetfeld (IMF) der inneren Heliosphäre - auch solare Komponente der kosmischen Strahlung genannt - wird bereits seit erster indirekter Messungen über Neutronenmonitore in den Jahren 1942 erforscht (siehe [9]). Die Beoachtungen haben bereits helfen
können, die wichtigsten Prozesse dieser, im MeV-Bereich liegenden Teilchen wie
Elektronen, Protonen und α-Teilchen zu identifizieren. Hierzu gehören die Konvektion entlang der Feldlinien des IMF, Diffusion an magnetischen Irregularitäten
, Fokussierung sowie adiabatische Dezelleration und Konvektion infolge des Sonnenwindeinflusses. Letzterer darf nicht mit den eigentlich beoachteten Ladungen
verwechselt werden. Zwar hat er ebenso wie diese seinen Ursprung in der Sonne,
ist aber letztlich als kontinuierlicher, radial abströmender Fluß thermischen Hintergrundplasmas anzusehen, das u.a. für die Form des IMF verantwortlich ist. Es
ist gemäß der Annahmen der Magnetohydrodynamik weder polarisier- noch magnetisierbar und kann wegen einer sehr hohen Leitfähigkeit keine elektrischen Felder
entwickeln, die wiederum mit den Bestandteilen der solaren kosmischen Strahlung
über Coulombkräfte wechselwirken. Die gesuchten, von Satelliten detektierten Partikel hingegen lassen vermuten, daß deren Eintrag eher impulsiven, oder zumindest
zeitlich begrenzten Charakters ist und vorzugsweise während starker Sonnenaktivität stattfindet (Flares und koronale Massenausstöße).
Alle Transportprozesse in der inneren Heliosphäre sind durch die Lorentzkraft bestimmt, so daß der Transport aufgrund der Gyration der Teilchen um die Feldlinie
im Wesentlichen entlang eben dieser Führungsfeldlinie erfolgt. Folglich war man bis
dato bemüht, entsprechende Transportgleichungen zu entwickeln und an den Meßdaten zu validieren. Bei sehr schnellen Teilchen kann man die Sonnenwindeffekte
vernachlässigen, was schließlich 1969 zum Ausbreitungsmodell von Roelof in Form
einer partiellen Differentialgleichung (PDE) geführt hat. Diese wurde 1995 von Ruffolo um die durch den Sonnenwind verursachten Impulsänderungen erweitert.
Diverse numerische Methoden wurden getest und Fits der Simulationsergebnisse
an die Meßdaten unternommen, um ein Abschätzung über die Stärke der Streuung parallel zu den Feldlinien in Form der mittleren freien Weglänge zu erhalten.
Man war und ist sich wegen der Intensitäts- und Anisotropieprofile darüber einig,
daß dieser Prozess zu den dominierenden im interplanteren Raum gehört. Die Intensitäten weisen im zeitlichen Verlauf einen schnellen und steilen Anstieg in der
Anfangsphase und ein langsam abfallendes Profil im Anschluß. Erste Hinweise auf
dieses typische diffusive Verhalten mit einer δ-Injektion zu Beginn konnten bereits
Meyer u. a. geben.
Allerdings mußte man eine Diskrepanz zwischen diesen Weglängen und denen aus
5
6
KAPITEL 1. EINFÜHRUNG
der Theorie um einen Faktor von bis zu 30 hinnehmen. Man vermutet die Ursache in
einer unzureichenden Interpretation der Magnetfeldfluktuationen, die die Diffusion
bestimmen. Es ist davon auszugehen, daß diese anisotrop auf die geladenen Teilchen reagieren - man hat bislang jedoch die Komponenten senkrecht zur Feldlinie
vernachlässigt, da das IMF die Vorzugsrichtung für die Partikelbewegung vorgibt.
Alternative Modelle sahen eine Behandlung der Diffusion im Dreidimensionalen in
Form eines gewöhnlichen Diffusionstensors vor, der jedoch nicht mehr die wichtigen
Prozesse entlang der Feldlinien wiedergeben konnte - insbesondere die Fokusierung in
divergierenden Feldern. Im Rahmen dieser Arbeit wurde eine korrekte Abschätzung
des diffusiven Transports durch einen additiven Term in den beiden o.g. Transportgleichungen in vereinfachter Geometrie realisiert. Der entsprechende Algorithmus
wurde dann in das Programm gref bzw. ngref (Ruffolo-Gleichung) implementiert
und dabei derart angelegt, daß dieser auf die übrigen Effekte und komplexeren Geometrien angepasst werden kann.
Während die Kapitel 2 und 3 die physikalischen Grundlagen des interplanetaren
Transports geladener Teilchen bzw. den Umgang mit partiellen Differentialgleichungen und deren numerische Behandlung im Allgemeinen rekapitulieren, werden im
darauf folgenden Kapitel 4 die Transportgleichungen von Roelof und Ruffolo in
Kürze vorgestellt. Dabei wird auch auf die Umsetzung dieser in den entsprechenden
FORTRAN-Code des Programms (n)gref eingegangen, zumal die Implementation
des Querdiffusionsterms sich an diesem orientiert.
Das Kaptitel 5 beschäftigt sich ausschließlich mit der Einführung von Querdiffusion. Es zeigt auf, wie diese mathematisch beschrieben und analytisch gelöst werden
kann, um diese Ergebnisse mit denen des numerischen Verfahrens vergleichen zu
können. Es findet hier die Entscheidung über ein angemessenes Differenzenverfahren hinsichtlich guter Konsistenz- und Stabilitätseigenschaften statt. Dokumentiert
wird zudem, inwiefern sich der Programmcode von gref dann ändert. Die Ausführung
verstricken sich jedoch nicht in Details. Vielmehr geht es darum, dem Anwender den
problemlosen Umgang mit gref zu ermöglichen und dem Software-Entwickler eine
erste Anlaufstelle für mögliche Ergänzungen bzw. Änderungen zu bieten. Um die
Umgestaltung des Quellcodes dennoch nachvollziehen zu können, werden die neuen
und modifizierten Bestandteile im Anhang unter A.2.4 protokolliert.
Ob das Querdiffusionsschema an sich und als Teil des Gesamtverfahrens korrekt
funktioniert und bereits durch angepasste Parameter gegebene Intensitäts- und Anisotropieverläufe wiedergeben kann, ist Gegenstand von 6. Die Wahl der Querdiffusionsgrößen orientiert sich jedoch nicht nur daran. Es wird anschaulich begründet,
warum und wie auch die Zahl der Rechenoperationen und Speicherplatz eine Rolle
spielen. Schließlich werden die Simulationsergebnisse qualitativ mit entsprechenden
Meßergebnissen verglichen.
Aufgezeigt wird dann am Ende noch in Kap. 7, wo die Grenzen dieser Modellerweiterungen liegen und welche Verbesserungen möglich wären.
2 Grundlagen der Plasma- und
Astrophysik
2.1 Definition wichtiger physikalischer Größen
2.1.1 Der Pitchwinkel
Unter der Voraussetzung, daß die solare kosmische Strahlung eine geringe (Energie)Dichte aufweist, kann man vereinfachend von einem ”Einzelteilchenmodell” ausgehen, wonach die geladenen Partikel als Verbund nicht auf die äußeren Felder wirken
können. Stattdessen wird die Teilchenbewegung im Wesentlichen durch das äußere Magnetfeld B beeinflußt. In solch einem Fall läßt sich für jedes um q geladene,
bewegte Teilchen eine Bewegungsgleichung über die Lorentz-Kraft aufstellen:
dv
.
(2.1)
dt
Sie wirkt senkrecht zum Feld und der Geschwindigkeit v des Teilchens. In Gegenwart eines homogenen, statischen Magnetfeldes führt dies zu einer gleichförmigen
Kreisbewegung in der Ebene senkrecht zu B sowie einer im Allgemeinen von Null
verschiedenen, konstanten Geschwindigkeitskomponente entlang des Feldes. Verfolgt
man den Pfad des Teilchens im Raum, so beschreibt es eine Spiralbahn um eine fiktive Gerade - der Feldlinie. Man sagt auch, es gyriere” um die besagte Führungs”
feldlinie. Der Umlaufsinn ist dabei ladungsabhängig, der Radius des Orbits - auch
Larmor-Radius genannt, ergibt sich nach Lösen der Bewegungsgleichung (2.1) zu
mv⊥
rL =
.
(2.2)
|q|B
FL = q · v × B ≡ m
Wegen ω =
Oszillators
v
rL
lautet die nicht-relativistische Gyrationsfrequenz dieses harmonischen
|q|B
.
(2.3)
m
Der Neigungswinkel α der Teilchenbahn zum Magnetfeld läßt sich durch das
Verhältnis der Geschwindigkeiten senkrecht (v⊥ ) und tangential, sprich parallel zum
Feld (v|| ) beschreiben
ω=
tan(α) =
v⊥
v||
(2.4)
7
8
KAPITEL 2. GRUNDLAGEN
Die Projektion der Teichengeschwindigkeit auf die Richtung des B-Feldes,
µ = cos(α)
(2.5)
der sogenannte ”Pitchkosinus”, spielt im Rahmen der Diffusionsprozesse entlang der
Magnetfeldlinie ein wichtige Rolle.
2.1.2 Magnetische Steifigkeit
Die magnetische Steifigkeit beschreibt die Fähigkeit eines geladenen Teilchens, dem
Einfluß des ihn umgebenen elektromagnetischen Feldes zu widerstehen:
P =
p⊥
.
q
(2.6)
p⊥ ist der Betrag des zu B senkrecht stehenden Impulses und q die Ladung des betrachteten Teilchens. Folglich ist der Larmorradius (2.2) der magnetischen Steifigkeit
direkt proportional mit rL = P/B. Man kann Teilchen gleicher magnetischer Steifigkeit sinngemäß zu Gruppen zusammenfassen, da sie alle diesselbe Bahn durchlaufen.
Die Geschwindigkeit ihres Durchlaufens hängt von v|| ab.
2.1.3 Magnetisches Moment
Bei stromdurchflossenen Leiterschleifen in einem homogenen Magnetfeld ist bekannt,
daß hierbei ein Drehmoment wirkt, das die Leiterschleifenebene orthogonal zu B
ausrichtet. Dabei wechselwirkt das Magnetfeld mit dem magnetischen Moment der
Leiterschleife.
Allgemein ist das magnetische Moment über
M = IAn
in [Am2 ]
(2.7)
mit I = Ringstrom
A = durch Leiterschleife umschlossene Fläche
n = Normalenvektor auf A (Richtung von Stromflußrichtung abhängig)
definiert.
Ein solches Moment bildet sich auch bei gyrierenden, geladenen Teilchen. Mit
I = qω/(2π) und A = πrL2 und dem Larmorradius (2.2) ergibt sich:
M=
2
Wkin,⊥
mv⊥
=
2B
B
(2.8)
Der Drehimpuls
L = mrL × v⊥ = mrL v⊥
(2.9)
2.1. DEFINITION WICHTIGER PHYSIKALISCHER GRÖSSEN
9
ist mit dem magnetischem Moment verknüpft.
2
2
mv⊥
(2.3) v⊥ q (2.9) qL
=
=
2B
2ω
2
Die vektorielle Darstellung lautet somit:
M=
(2.10)
qL
1
B
= qrL × v⊥ = −Wkin,⊥ 2
(2.11)
2
2
B
Das Moment ist stets dem äußeren Feld entgegengerichtet. Es ist zudem, wie
die kinetische Energie eine Erhaltungsgröße, sofern das Magnetfeld konstant bleibt
bzw. sich nur langsam (adiabatisch) ändert. Dies ist eine unmittelbare Konsequenz
aus (2.1), wenn man diese Gleichung mit v multipliziert und den rechtsseitigen
Differentialausdruck durch Wkin ausdrückt (siehe auch [19], S.24).
M=
2.1.4 Grundgleichungen des Elekromagnetismus
Die Maxwell’schen Gleichungen bilden die Grundlage zur Beschreibung der Dynamik von elektromagnetischen Feldern und den mit ihnen verbundenen geladenen
Teilchen bzw. Teilchenströmen.
Maxwell’sche Gleichungen im Vakuum
Im Jahr 1873 führte Maxwell eine vereinheitlichte Theorie über die Zusammenhänge
von Ladungen, elektrischen und magnetischen Feldern ein. Da das Plasma im interplanetaren Raum eine relativ geringe Dichte aufweist, lassen sich die vier Maxwell’schen Gleichungen auf jene für das Vakuum vereinfachen. Im wesentlichen bedeutet dies, daß das Plasma weder magnetisiert noch polarisiert werden kann. Ersteres erlaubt nicht, daß das Magnetfeld seinerseits weitere geladene (Kreis-)Ströme
induziert, die mit dem umgebenden Feld wechselwirken können. Im anderen Fall
dürfen keine elektrischen Felder existieren, die die Bestandteile des Plasmas derart ausrichten, daß ein E-Feld entsteht, das dem äußeren entgegenwirkt (siehe auch
[32],S.918-19 bzw. 725-27).
Der Gaußsche Satz für elektrische Felder E - hier in Poisson-Schreibweise - identifiziert Ladungen als Quellen elektrischer Felder:
ρc
(2.12)
∇E =
0
mit ρc = Ladungsdichte in [As/m3 ]
0 = elektrische Feldkonstante (siehe Anhang) .
Wenn man über das Gesamtvolumen V integriert und anschließend den Gaußschen
Integralsatz (siehe [32], S.704)
I
Z
EdA =
∇EdV
S
V
10
KAPITEL 2. GRUNDLAGEN
auf den Satz anwendet, lässt sich zudem erkennen, daß die Änderung des elektrischen
Flußes ∂t φe = ∂t E/A, also der zeitliche Wechsel der Zahl der Feldlinien pro Fläche,
allein durch die Ladungsänderung bestimmt ist.
Analog gibt es eine Formulierung für magnetische Felder, wonach er magnetische
Fluß durch eine geschlossene Oberfläche stets null ist - gleichbedeutend mit der
Tatsache, daß die Zahl der ein- und austretenden B-Feldlinien identisch ist. Im Gegensatz zu elektrischen Feldern existieren hier also keine magnetischen Monopolfelder; die Feldlinen bilden also um ihre Quellen (siehe (2.14) und (2.15)) geschlossene
Gebilde:
∇B = 0 .
(2.13)
Das Faraday-Gesetz stellt fest, daß ein elektrisches Feld durch ein sich zeitlich
änderndes Magnetfeld B erzeugt wird.
∇×E=−
∂B
∂t
(2.14)
Durch Anwendung
R des Stoke’schen Integralsatzes (siehe [32], S.866), der ein Oberflächen-Integral O dA in ein Integral einer geschlossenen Kurve C überführt,
Z
I
Z
∂φm
∂
BdA ⇔
= − Edl
∇ × EdA = −
∂t O
∂t
C
O
erkennt man, daß ein zeitlich variabler magnetischer Fluß φm durch eine Fläche S
ein elektrisches Feld (oder auch eine elekromotorische Kraft (EMK), siehe auch [19],
S.19) in seiner Umgebung hervorruft. Diese wiederum erzeugt ein B-Feld, das dem
ursprünglichen entgegensetzt ist (Lenzsche Regel).
Das Ampre’sche Gesetz zeigt, daß ein geladener Teilchenstrom ein rotierendes
(Wirbel-) Magnetfeld hervorruft. An dieser Stelle käme im allgemeinen Fall noch
ein additiver Anteil hinzu, der die Erzeugung eines B-Feldes durch ein sich zeitlich
änderndes elektrisches Feld bewirkt. Wegen der Annahmen der Nicht-Polarisierbarkeit
interplanetarer Plasmen entfällt dieser jedoch:
∇ × B = µ0 j
(2.15)
mit j = Ladungsstromdichte in [A/m2 ]
µ0 = magnetische Feldkonstante (siehe Anhang) .
Verallgemeinertes Ohm’sches Gesetz
Elektrische Felder rufen in Plasmen Ladungsströme hervor. Das Ohmsche Gesetz
verknüpft beide über die elektrische Leitfähigkeit, die im anisotropen Fall statt eines
Skalars einen Tensor darstellen kann.
j = σ (E + u × B)
(2.16)
2.1. DEFINITION WICHTIGER PHYSIKALISCHER GRÖSSEN
11
mit j = Ladungsstromdichte in [A/m2 ]
σ = elektrische Leitfähigkeit (siehe Anhang)
u = Relativgeschwindigkeit zwischen Plasma und Beobachter in [km/s]
Im Falle eines Beoachters, der sich nicht im Bezugssystem des sich ausbreitenden
Plasmas befindet, kommt noch ein induziertes elektrisches Feld u × B hinzu.
Kontinuitätsgleichung
Die Kontinuitätsgleichung gilt als eine der wichtigsten partiellen Differentialgleichungen zur Beschreibung des Erhalts einer Eigenschaft in biologischen, chemischen oder physikalischen Systemen.
∂
+ ∇j() = s()
∂t
(2.17)
In einem Volumenelement wird die Änderung einer Eigenschaft - dies können
beliebige Dinge wie Ladungen, Massen, Populationen, Energie oder deren Dichten
sein - durch Flüsse j in das System hinein (und/ oder hinaus) und einen Quellterm
s() (chemische Reaktionen, Reproduktion biologischer Organismen, o.ä.) bestimmt.
Ihre Anwendung im Numerischen ist hierbei besonders anschaulich: Der (Phasen)Raum wird in diskretisierte Elementarvolumen unterteilt und für jede dieser Zellen
eine Bilanz der (Phasenraum-)Dichte aufgestellt.
2.1.5 Wichtige Meßgrößen im interplanetaren Raum
Spätere Tests und Validierungen am Modell erfordern zunächst, die Zusammenhänge
zwischen den numerischen Ergebnissen und entsprechenden Meßgrößen herzustellen.
Differentielle Intensität: Sie ist allgemein definiert, als die Zahl der am Ort x aus
Richtung n den Raumwinkel dΩ und die darauf senkrecht stehende Fläche σ zur
Zeit t durchsetzenden Teilchen aus dem Energieintervall [E + dE]:
I(x, E, n, t)dE, dΩ, dt
[I] =
Anz.d.T eilchen
M eV · s · sr · cm2
Es handelt sich um eine direkt meßbare Größe, die allerdings aufgrund des endlich
großen Öffnungswinkels eines Detektorteleskops (Meßgerät auf HELIOS-Satellit) nur
angenähert bestimmt werden kann. Für den Fall, daß der Satellit rotiert und daher
eine kontinuierliche Winkelverteilung gemessen werden kann, kommt ein spezielles
Meßverfahren unter Annahme gyrotroper Pitchwinkelverteilungen zum Zuge ([15],
S.12-22). Letzteres bedeutet, daß alle Teilchen unter verschiedenen Azimuthwinkeln
ϕ gleich stark vertreten sind. Wegen einer speziellen Ausrichtung des Detektorteleskops relativ zur Gyrationsachse der geladenen Teilchen, entsprechen die gemessenen
Höhenwinkel ϑ den Pitchwinkeln der Teilchen. Allerdings wird nur in acht Sektoren mit einem jeweiligen Öffnungswinkel von 45◦ gemessen und gemittelt. Zudem
werden die Ladungen beschränkten Energiekanälen zugeordnet.
12
KAPITEL 2. GRUNDLAGEN
Hiermit reduziert sich Abhängigkeit der differenziellen Intensität ausschließlich
auf µ = cos (α) und das jeweilige Energieintervall. Um einen kontinuierlichen Verlauf
von I(µ) näherungsweise zu rekonstruieren, kann man die Intensität durch LegendrePolynome bis zu vierter Ordnung approxmieren ([15],S. 22-24).
I(µ) =
∞
X
gn Pn (µ)
n=0
Die Legendrepolynome bilden eine Orthogonalbasis, so daß die berechneten Legendrekoeffizienten eindeutig bestimmt sind. Zudem kann man ihnen eine konkrete
physikalische Bedeutung zuordnen - was eine Analyse der Pitchwinkelverteilungen
(PWV) gegenüber einer Begutachtung per Auge bedeutend einfacher gestaltet.
Der nullte Koeffizient umschreibt den isotropen Anteil der PWV - also der über
alle Richtungen n gemittelten (omnidirektionalen) differenziellen Intensität
I = g0
(2.18)
Die übrigen Koeffizienten - dividiert durch g0 - entsprechen den Anisotropien |A|
n-ter Ordnung
gn
(2.19)
g0
Sie geben ein Maß für das Verhältnis von gerichteter Teilchenströmung zu der
Strömung, die man erhält, wenn sich alle Teilchen in einem Volumenelement der
Dichte UE mit der Geschwindigkeit v/3 bewegen ([15], S. 12). Üblicherweise gibt
man A als vorzeichenbehafteten Skalar an, wenn man damit ausdrücken möchte,
wie sich die Teilchen entlang einer Feldlinie (Vorzugsrichtung) orientieren. Sie ist
negativ bei einer entgegen der Polarität gerichteten Bewegung, positiv bei gleicher
Orientierung und null bei isotroper Verteilung.
Die differenzielle Intensität ist letztlich über die Phasenraumdichte f im Programm (n)gref über die Relation
|An | =
I(x, E, µ, t) = p2 f (x, t, p, µ)
p mit dem Betrag des Teilchenimpulses (2.20)
verknüpft ([15],S. 25). Die skalare Größe f beschreibt die Zahl pro Phasenvolumen an (über eine Gyration gemittelten) geladenen Teilchen mit den Eigenschaften:
Position x auf der Feldlinie, Zeitpunkt t, Impuls p und dem Pitchkosinus µ.
2.2 Transportprozesse in Plasmen der inneren
Heliosphäre
Die maßgeblichen Einflußfaktoren zur Beschreibung des interplanetaren Transports
energiereicher, geladener Teilchen - hierzu gehören hauptsächlich Elektronen, Pro-
2.2. TRANSPORTPROZESSE IN PLASMEN DER INNEREN
HELIOSPHÄRE
13
tonen, Heliumionen (α-Teilchen) - sind der Solarwind und das interplanetare Magnetfeld.
Letzteres hat seinen Ursprung im solaren Magnetfeld. Jedes Gestirn mit einem
flüssigen Kern erzeugt durch den Dynamoeffekt ([19],S. 79-84) ein ihn umgebendes
Magnetfeld, das im Vakuum und ohne Einflüsse von weiteren Ladungsträgern gemäß
des Gaußschen Gesetzes für Magnetfelder (2.13) geschlossene Feldlinien ausbildet.
Einzelne geladene Teilchen können diesen nicht entkommen, da diese sich durch
Gyrationsbewegungen eine Vorzugrichtung entlang dieser Linien erhalten. Die hohe Energiedichte des radial von der Sonne abströmenden Sonnenwindes sorgt jedoch
dafür, daß dieser vielmehr den Verlauf des Magnetfeldes beeinflußt als umgekehrt das
Feld die Richtung des Ladungstransports (eingefrorenes Magnetfeld). Stellenweise
nimmt die Form des Feldes die eines Monopols an, wie bei elektrischen Feldern von
Punktladungen üblich. Der Sonnenwind, dessen Plasmabestandteile durch Wechselwirkungen mit elektromagnetischen Wellen und Turbulenzen, aber auch durch
Neuorientierung und Verbinden von ursprünglich getrennten Magnetfeldlinien in
der Korona (Feldlinienverschmelzung oder Rekonnektion,[19], S.74-78) zusätzliche
Bewegungsenergie erfahren, weist eine ausreichend vorhandene Dichte an Ladungsträgern auf und ist zudem ein zwischen 400 und 800km/s schneller kontinuierlicher
Fluß. Dieser trägt das B-Feld radial nach außen - man spricht vom magnetohydrodynamischen Prinzip der ”eingefrorenen” Feldlinien ([19], S. 66,67). Es gilt unter
der Voraussetzung, daß die Leitfähigkeit σ einen gegen unendlich strebenden Wert
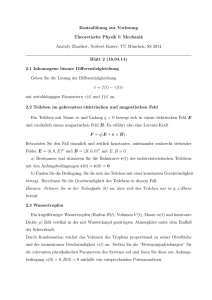
annimmt. Gleichzeitig rotiert die Sonne und damit die Fußpunkte der Feldlinien mit
konstanter Winkelgeschwindigkeit ω um ihre eigene Achse, so daß das Magnetfeld
die Form einer archimedischen Spirale annimmt (siehe Abb. 2.1).
Abbildung 2.1: Das interplanetare Magnetfeld in Form einer archimedischen Spirale
([19],S.160)
Die 1/r2 -Abhängigkeit war wegen des Gaußschen Gesetzes (2.13) zu erwarten, die
konkrete Abhängigkeit von der Sonnenwindgeschwindigkeit vSW und der mittleren,
14
KAPITEL 2. GRUNDLAGEN
solaren Winkelgeschwindigkeit ω kann mit Hilfe des Faraday’schen, Ohm’schen
und Ampèreschen Gesetzes sowie der Annahme von σ → ∞ und einem zeitlich
konstanten Magnetfeld hergeleitet werden ([19], S. 159):
1
B(r) = B(r0 ) 2
r
s
1+
ω sin θr
vSW
2
(2.21)
mit θ ∈ [0, 180] als heliographische Breite.
Das Feld erfüllt auch weiterhin das Gaußsche Gesetz - der magnetische Nettofluß
bleibt null, da sich die Regionen gleicher Polaritäten (Feldlinien-Richtungen) regelmäßig abwechseln (siehe Abb. 2.21). Wie viele es davon gibt, hängt von der Aktivität der Sonne ab. Im solaren Minimum (geringe Aktivität) ist eine dem Äquator
nahe fiktive Grenzlinie zu beobachten, die Regionen gleicher Polarität voneinander
trennt. Direkt an dieser neutralen Linie heben sich die Feldlinien gegenseitig auf,
so daß Teilchen dort der Sonne entkommen können. Die Ladungen bewegen sich
in einer Schicht, die bis weit in die Heliospäre (Einflußgebiet des Sonnenwindes,
innerhalb des Sonnensystems) hinausgetragen wird: die sogenannte die heliosphärische Strömungsschicht (heliospheric current sheet, HCS ). Die Überexpansion des
Sonnenwindes ([19],S. 155,156) trägt zudem dazu bei, daß auch Ladungen, die vorzugsweise an den Polen über offene Feldlinie entkommen konnten, letzlich auch über
die o.g. Schicht weitertransportiert werden und auf ihrem Weg dorthin die Feldlinien
entsprechend verformen (Ballerina-Modell ).
Daher sind Messungen innerhalb des Neigungswinkels der neutralen Linie, der mit
zunehmender Sonnenaktivität ansteigt, von besonderem Interesse.
2.2.1 Konvektion
Die Bewegung schneller, geladener Teilchen (nicht jene des Sonnenwindes) entlang des archimedischen Feldes beschreibt einen großskaligen Transportprozess. Ihre Geschwindigkeit v erhalten sie unter anderem durch die Umwandlung magnetischer Energie während eines Flares oder koronalen Massenausstoßes. Ohne weitere Einflußfaktoren und in einem homogenen Magnetfeld würde jede Ladung eine
gleichförmige Bewegung mit konstanter Kreisfrequenz ausführen (siehe (2.1)). Offenbar entscheidet der Neigungswinkel - sofern man ihn als konstant für diesen vereinfachenden Fall annimmt - darüber, ob das Teilchen seine kinetische Energie vollständig
in eine konstante, gerichtete Richtung oder teilweise (oder ganz) in Gyration umsetzt. Unabhängig davon, welche Annahmen man an die zeitliche Variabilität dieser
Größen stellt - in jedem Fall gibt die Bewegung entlang der Magnetfeldlinien eine
Vorzugsrichtung vor, an der sich auch das Transportmodell nach Roelof orientiert
(sieh Kap. 4.1). Erst bei niederenergetischen Teilchen spielt auch die Konvektion
durch den Sonnenwind eine Rolle, so daß sich eine Betrachtung des Transports im
Koordinatensystem des Solarwindes anbietet (siehe Ruffolo in Kap. 4.3).
2.2. TRANSPORTPROZESSE IN PLASMEN DER INNEREN
HELIOSPHÄRE
15
2.2.2 Fokussierung
Die Fokussierung ist eine unmittelbare Konsequenz divergierender bzw. konvergierender Magnetfeldlinien und dem Erhalt des magnetischen Moments (2.11). Das
magnetische Moment M bleibt konstant, sofern sich das umgebende Magnetfeld
während einer Gyration nur langsam im Vergleich zur Zeitskala der Gyration und
auch nur geringfügig (gegenüber der Feldstärke) ändert (siehe auch [19], S.35-36). Da
ein Einfluß durch elektrische Felder nicht berücksichtigt wird, bleibt die kinetische
Energie erhalten, zumal die Lorentzkraft (2.1) lediglich senkrecht zur Teilchenbewegung angreift und nur eine Änderung in der Richtung, nicht aber im Betrag bewirkt.
1
1
Ekin = mv 2 = mv|| + M B
2
2
Ekin setzt sich der Bewegung längs (parallel) der Magnetfeldlinie und senkrecht dazu als Gyrationsenergie zusammen. Im divergierenden (schwächer werdenen) B-Feld
wird demnach der Verlust an Gyrationsenergie durch eine zunehmende Driftenergie kompensiert; d.h. die geladenen, bewegten Teilchen gehen von einer Spiralbahn
asymptotisch in eine vorwärtsgerichtete Bewegung über - der Neigungswinkel geht
gegen null. Umgekehrt führen konvergierende Felder zum ”Aufspiralen” eines Ladungspartikels und schließlich zur Umkehr der Bewegungsrichtung entlang der Feld2
linie (siehe [19],S.39-40). Konkret läßt sich wegen m · v⊥
/2mB = const. an zwei
Orten unterschiedlicher Feldstärke das Verhältnis des Neigungswinkels zu B wie
folgt ermitteln:
v 2 sin (α2 )2
v 2 sin (α)2
=
B1
B2
(2.22)
Die bewegte Ladung am Ort 1 erfährt im weiteren Verlauf eine Richtungsumkehr
im Punkt m = 2 (Spiegelpunkt), wenn die Bedingung
r
B1
µ1 = 1 −
(2.23)
Bm
erfüllt ist. Weist das Teilchen einen größeren Pitchwinkel auf, passiert es den Spiegelpunkt - umgekehrt wechselt es bereits davor die Richtung.
Fokussierung ist in der gesamten Heliosphäre zu beobachten. Meist sind die Magnetfeldgradienten im interplanetaren Raum jedoch nicht so stark, daß sie zu einer
Spiegelung führen. Mit zunehmenden Abstand von der Sonne geht der Neigungswinkel im Mittel von α ≈ 90◦ bis zur oberen Erdatmosphäre auf 0.7◦ zurück.
2.2.3 Resonanzstreuung
Wenngleich das spiralförmige Magnetfeld eine Vorzugsrichtung für die Bewegung der
Teilchen angibt, so ist dieses großskalige, durch eine zeitabhängige Funktion exakt
16
KAPITEL 2. GRUNDLAGEN
Abbildung 2.2: Leistungs-Dichte-Spektrum der Magnetfeldfluktuationen ([19],S.166)
und eindeutig beschriebene Feld von stochastischen Fluktuationen unterschiedlichster Art und Ursache überlagert. Üblich ist es, die Fluktuationen in Form eines
Potenzgesetzes der Form
f (k|| ) = C · k||−q
(2.24)
mit k|| als parallel zum Magnetfeld orientierter Wellenzahl, der Steigung q und der
Konstante C als Maß für die Stärke der Fluktuationen zu beschreiben (siehe Abb.
2.2.3).
(2.24) trägt der Tatsache Rechnung, daß Fluktuationen auf verschiedenen Skalen
mit unterschiedlicher Wirkung auf das Plasma existieren. Als Ursachen sind unter
anderem die Strömungsstruktur des Sonnenwindes, die photosphärische Supergranulation ([19], S.139-140), Alfvén-Wellen (transversale, parallel zu B sich ausbreitende, ungedämpfte elektromagnetische Wellen), Ion-Zyklotron- und Akustische Wellen
([19], S.104,102) zu nennen.
Gemessene Zeit-Intensitäts-Profile zeugen von (Diffusions-)Streuprozessen, deren
Ursachen man in der Interaktion zwischen die fluktuierenden Anteilen des Magnetfeldes und den Plasmabestandteilen sieht. Man geht davon aus, daß im interplanetaren
Raum Streuung aufgrund von Coulombwechselwirkung - also Wechselwirken von geladenen Teilchen am Hintergrundplasma, keine bedeutende Rolle spielt, zumal die
Ladungsdichten sehr gering sind. Diese Art von Wechselwirkung würde in den meisten Fällen eine deutliche Ablenkung der Reaktionspartner von ihrer ursprünglichen
Bahn bedeuten. Stattdessen hat sich die Theorie durchgesetzt, daß die Teilchen im
Wechselwirkungs-Fall nur um kleine Winkel von ihrer ursprünglichen Bahn abwei-
2.2. TRANSPORTPROZESSE IN PLASMEN DER INNEREN
HELIOSPHÄRE
17
chen. Formal läßt sich der Prozess - betrachtet man das Plasma als Konglomerat
einzelner Teilchen - als räumliche Diffusion im Pitchwinkel beschreiben:
∂
∂f
κ(µ)
∂µ
∂µ
mit der Phasenraumdichte f (t, s, µ) und dem Pitchwinkel-Diffusionskoeffizienten
(PWDK) κ(µ), der mit der mittleren freien Weglänge entlang der Feldlinie im folgenden Zusammenhang steht([15],S. 28, F. 2.15):
Z +1
3
(1 − µ2 )2
λ|| = v
dµ
(2.25)
8 −1
κ(µ)
Pitchwinkelstreuung führt auf größeren Skalen von λ|| zur 1D-Diffusion entlang
der Magnetfeldlinie, kann aber nicht durch eine 1D-Diffusion ersetzt werden, da
jede einzelne Wechselwirkung die Geschwindigkeit des Teilchens parallel zum Feld
ändert. Die wäre bei eindimensionaler Diffusion nicht der Fall.
Die Form des Diffusionskoeffizienten wird wesentlich durch die Annahmen der
Quasilinearen Theorie geprägt (siehe [19] S. 231-234 und den darin enthaltenen
Verweisen). Während die übrigen Transportprozesse der Fokussierung und Konvektion (Kap. 2.2.1 und 2.2.2) durch eine eindeutige und lösbare Bewegungsgleichung
(4.1) beschrieben sind, sind die stochastischen Welle-Teilchen-Wechselwirkungen nur
unvollständig verstanden und quantifizierbar, so daß gewisse Vereinfachungen notwendig sind. Basierend auf der Störungstheorie werden bei den Fluktuationen Effekte zweiter Ordnung und höher vernachlässigt. Man betrachtet letztlich nur jene
Größen f0 , B0 und E0 , die sich nur 1 langsam ändern, sowie kleine Störungen dieser Größen, so dass alle relevanten Gleichungen linearisiert werden können - entweder durch Taylorreihen-Entwicklung oder durch Anwendung der Reynolds-Theoreme
([19], S.92).
Das interplanetare Magnetfeld (2.21) gibt den Plasmateilchen über die Lorenzkraft (2.1) eine Vorzugsrichtung vor. Aber es ist von Effekten linearer Ordnung,
den fluktuierenden Bestandteilen f1 , B1 und E1 bzgl. ausgewählter Raumrichtungen überlagert. Diese mitteln sich zwar über einen längeren Meßzeitraum heraus,
haben jedoch einen diffusiven Einfluß auf die energiereichen Ladungen.
Man erklärt sich die Welle-Teilchen-Wechselwirkung anschaulich mit dem ResonanzPrinzip, d.h. man sieht eine Interaktion genau dann als sehr wirkungsvoll an, wenn
die Fluktuationswellen ”in Resonanz” mit dem Teilchen sind. Dann führt eine einzelne Streuung zu einer kleinen Pitchwinkelstreuung während einer Gyration, wobei
die Änderung im Neigungswinkel davon abhängt, mit welchem Teil der Welle das
Teilchen wechselwirkt. Wenn es bei jeder Gyration in gleicher Phasenlage zur Welle
ist, erfolgt die Streuung immer in gleicher Richtung und erzeugt damit auch einen
1
im Sinne von 1.: zeitliche Variation ist klein gegenüber der Gyrations(Umlauf-)zeit Tc ; 2.: räumliche Variation senkrecht zum Feld ist klein im Vergleich zum Larmorradius rl (2.2) und 3.:
die räumliche Variation entlang der Feldlinie ist klein gegenüber der nach Tc zurückgelegten
Strecke
18
KAPITEL 2. GRUNDLAGEN
Abbildung 2.3: Resonanzstreuuung ([20],S.80)
makroskopischen Effekt. Sieht das Teilchen immer einen anderen Teil der Welle (keine feste Phasenlage, d.h. während einer Gyration wird nicht genau eine Wellenlänge
erfasst), so sind die einzelnen Streuungen unterschiedlich stark und unterschiedlich
gerichtet, so dass sie sich im Mittel aufheben.
Vereinfachend betrachtet man nur jene Fluktuationen, die sich parallel zum Magnetfeld B0 (mit parallen Wellenvektoren λ|| ) ausbreiten (slab-Modell ). In Abb. 2.3
ist der Resonanzfall skizziert: Er tritt ein, wenn die Wellenzahl exakt der zurückgelegten Strecke während einer Gyration Tc entspricht
λ|| = v|| · Tc .
Die Stärke der Wechselwirkung wird durch das Leistungs-Dichte-Spektrum (2.24)
festgelegt.
Die klare Trennung zwischen sich nur langsam ändernden Anteilen und dem fluktuierenden wird über die Vlasov -Gleichung
q
∂f0
q
∂f0
+ v∇f0 + v × B0 ·
=−
∂t
m
∂v
m
∂f1
(E1 + v × B1 )
∂v
(2.26)
gemacht. Lösungen existieren, sofern die Partikeleigenschaften wie die magnetische
Steifigkeit (2.6) und die Fluktuationen über ein Potenzgesetz (2.24) bekannt sind.
Basierend auf dem Leistungs-Dichte-Spektrum läßt sich des Form den PWDK ableiten:
κ(µ) = A (1 − sign(µ))|µ|q−1 + H (1 − µ2 ) .
(2.27)
Diffusion mit q = 1 geschieht immer isotrop, d.h. Teilchen unterschiedlichen Neigungswinkels werden ähnlich stark gestreut. Mit anwachsendem q bilden sich eine
Resonanzlücke um µ = 0, die sich mit dem Parameter H ganz oder teilweise wieder
auffüllen läßt. Wenn nicht, erfahren Teilchen, deren Bewegung sich fast ausschließlich
in Gyration ausdrückt (α = 0), keine Streuung mehr. Ist die Lücke signifikant breit,
können die SEPs ohne weitere Einflüsse keine Richtungsumkehr mehr erfahren (entkoppeltes Verhalten von sich sonnenabgewandt und sonnenzugewandt bewegenden
Teilchenpopulationen).
2.2. TRANSPORTPROZESSE IN PLASMEN DER INNEREN
HELIOSPHÄRE
19
Die theoretischen Berechnungen, die sich aus den o.g. Annahmen ableiten, ließen sich in der Vergangenheit durch entsprechende Meßdaten über Intensitäts- und
Anisotropieverläufe gut vergleichen, da auch diese nur in einer Vorzugsrichtung gemessen wurden. Gleichzeitige omnidirektionale Messungen waren zwar schon üblich,
allerdings wurde bei der Auswertung die Anisotropie stets bezüglich der Magnetfeldrichtung (also mit Vorzugsrichtung) bestimmt. Ein möglicher Quertransport wurde
bis dato nicht in Betracht gezogen, so daß zu vermuten ist, daß die vollständige
Abhängigkeit des Diffusionskoeffizienten D(µ) von den Magnetfeldfluktuationen in
Form eines Korrelationstensors nicht bekannt ist (siehe [5]).
20
KAPITEL 2. GRUNDLAGEN
3 Partielle Differentialgleichungen
Es soll an dieser Stelle ein kurzer Überblick über lineare, partielle Differentialgleichungen und deren numerische Behandlung gegeben werden. Da in Rahmen dieser
Arbeit der dynamische Transport in zwei Raumdimensionen behandelt wird, beschränkt man sich an dieser Stelle auf Funktionen
u : R3 → R : u = u(t, x1 , x2 )
in drei unabhängigen Variablen, wobei t hierbei die Rolle der Zeit übernimmt. x1
und x2 sind die Raumkoordianten, die der Einfachheit halber im kartesischen Koordinatensystem angegeben werden. Die nun folgende Theorie ist auf den Fall n
unabhängiger Variablen erweiterbar, soll aber der Übersichtlichkeit halber nicht verallgemeinert werden.
3.1 Klassifikation und analytische Lösungswege
Definition Es sei u -wie oben definiert - eine reellwertige Funktion in 3 unabhängigen
Variablen, die hinreichend oft nach ihren Variablen differenzierbar ist. Man
einige sich dabei auf folgende Notation:
uxj (t, x1 , x2 ) =
∂u(t, x1 , x2 )
∂xj
j = 1, 2 und ut (t, x1 , x2 ) =
∂u(t, x1 , x2 )
,
∂t
welche dann analog auch für Ableitungen höherer Ordnung anzuwenden ist.
Dann heißt die folgende Beziehung, in der die unabhängigen Variablen, die
Funktion u und deren Ableitungen auftreten können
F (t, x1 , x2 , u, ut , ux1 , ux2 , ut,t , . . . , ux2 ,x2 , ut,x1 ,x1 , . . . ) = 0
(3.1)
eine partielle Differentialgleichung(PDE) n-ter Ordnung (wenn n die höchste
Ableitung in (3.1) ist) ([2],S.2).
Sie heißt zudem linear, wenn in (3.1) keine Produkte von Ableitungen auftauchen.
Gleichungen diesen Typs von maximal 2. Ordnung sollen hier Anwendung finden.
21
22
KAPITEL 3. PARTIELLE DIFFERENTIALGLEICHUNGEN
Man klassifiziert diese in den Kategorien elliptisch, hyperbolisch und parabolisch.
Wie diese Typeinteilung formal vorgenommen wird und welche konkrete physikalische Bedeutung dahinter steckt, soll nun im Folgenden erläutert werden.
Die Definitionen rühren ursprünglich von der Bestimmung der charakteristischen
Gleichungen (Charakteristiken) einer PDE her. Hierzu muß die PDE, wenn sie denn
höherer Ordnung als eins ist, zunächst in ein System von PDE’s erster Ordnung
umgeformt werden - was im Fall linearer, aber auch quasilinearer Gleichungen ([2],S.
59ff.) möglich ist. Das System für PDEs 2. Ordnung nimmt dann folgende Form an:
2
L(u) = At
mit u
At , Axj
L(u), b
∂u
∂u X
+
Axj
+b=0
∂t
∂x
j
j=1
(3.2)
= (u1 , u2 )
∈ R2×2 j = 1, 2
∈ R2 .
Die Lösung der PDE entspricht einer Hyperebene im (t, x1 , x2 , u(t, x1 , x2 ))-Raum,
der sogenannten Integralfläche (Fiele x2 weg, hätte man es mit ein ”richtigen” Fläche
im 3-D-Raum zu tun). Charakteristiken sind folglich Projektionen von Höhenlinien
- z.B. für u(t, x1 , x2 ) = 0. Physikalisch kann man sie als jene Zustandspfade interpretieren, in denen eine Eigenschaft bzw. Information u erhalten bleibt.
Man nehme eine Flächenfunktion φ : Rn → R mit φ(t, x1 , x2 ) = 0 an. Bildet man
nun die charakteristische Matrix
2
∂φ X ∂φ
+
Axj
A = At
t
∂x
j
j=1
und wählt die Ableitungen derart, daß die Determinante von A (charakteristische
Form) gleich Null ist, so lassen sich die Charakteristiken daraus bilden. Dies ist
mathematisch gleichbedeutend damit, daß man den Differentialoperator L(u) als
Linearkombination der Differentialoperatoren
Lj (u) = At +
2
X
j=1
Axj
∂u
∂xj
schreiben kann1 . Man sagt in diesem Fall auch, die Ableitung von u liege innerhalb
des von φ definierten Gebietes.
Die Zahl an reellwertigen Chrakteristiken entscheidet letztlich darüber, welchem
der o.g. Typen eine PDE zugeordnet werden kann. Grundsätzlich läßt sich im Zweidimensionalen feststellen, daß sich hyperbolische PDE’s durch zwei reellwertige Charakteristiken auszeichnen. Sie beschreiben reversible Prozesse, die man in der Zeit
1
Man kann das Vorgehen auch durch eine Eigenwertbestimmung von A ersetzten. So getan in
anwendungsfreundlicher Weise in [2] auf den Seiten 84ff.
3.1. KLASSIFIKATION UND ANALYTISCHE LÖSUNGSWEGE
23
zurückverfolgen kann (z.B. Advektion/Konvektion, Wellenphänomene). Diese verhalten sich dynamisch: Eine der unabhängigen Variablen übernimmt daher die Funktion der Zeit t. Dynamisch, aber irreversibel in ihrem beschriebenen Verhalten sind
parabolische PDE’s (Diffusion und Dispersion). Hier ist nur eine reelle Charakteristik zu finden. Ganz im Gegensatz dazu stellen die Lösungen der elliptischen PDE’s
statische Zustände dar - es gibt hier keine zeitliche Abhängigkeit. Die unabhängigen
Varibalen repräsentieren in vielen Anwendungen Ortskoordinanten, so auch in der
Laplace-Gleichung (siehe [31],S.508). Die charakteristischen Gleichungen sind hier
rein imaginär.
Die Degenerierung von Charakteristiken hat letztlich zur Folge, daß u.U. statt zwei
nur eine oder gar keine Anfangsbedingungen (z.B. bei der Laplace-Gleichung) angegeben werden müssen, um ein konkretes Problem lösen zu können. In Kap. 5.2 wird
bei der Einführung von Querdiffusion (parabolischer Typ) nachvollzogen, warum
aufgrund der berechneten Charakteristiken nur eine Anfangsbedingung notwendig
ist.
Sofern u(t, x1 , x2 ) auf einem unbegrenzten (x1 , x2 )-Raum definiert ist, spricht man
von der reinen Anf angswertaugabe (AWA). Physikalischen Problemen sind im Allgemeinen räumliche Grenzen gesetzt, so daß zusätzliche Randbedingungen benötigt
werden.
Man unterscheidet zwischen drei Randbedingungen:
u(t, L1 , x2 ) = u1,L1 (t, x2 ) und u(t, x1 , L2 ) = u2,L2 (t, x2 ) Dirichlet − Bedingung,
∂u(t, x1 , L2 )
∂u(t, L1 , x2 )
= u3,L1 (t, x2 ) und
= u4,L2 (t, x1 ) Neumann − Bedingung
∂x2
∂x1
δ1 ux2 (t, L1 , x2 ) + δ2 u(t, L1 , x2 ) = u5,L1 (t, x2 ) und
δ3 ux1 (t, x1 , L2 ) + δ4 u(t, x1 , L2 ) = u6,L2 (t, x1 )
Robin − Bedingung ,
wobei L1 und L2 Platzhalter für die Ränder bzgl. x1 bzw. x2 darstellen.
Während eine gewöhnliche Differentialgleichung (siehe z.B. [4],S.19ff) gleicher
Ordnung unter sehr generalisierten Bedingungen (u.a. Lipschitz-Stetigkeit) eine allgemeine Lösung besitzt, die von 2 beliebigen Integrationskonstanten abhängig ist,
besteht die Lösung der PDE 2. Ordnung aus maximal zwei Funktionentypen. Möchte
man eine Lösung für ein konkretes Problem ermitteln, sind neben der Anfangsbedingung u(0, x1 , x2 ) = u0 (x1 , x2 ) Randbedingungen - wie oben definiert - notwendig.
Geschlossene analytische Lösungen sind meistens nur unter sehr vereinfachenden
Annahmen zu finden
24
KAPITEL 3. PARTIELLE DIFFERENTIALGLEICHUNGEN
• Konstante und/oder nullwertige Koeffizenten vor u und dessen Ableitungen
• Vereinfachte Anfangs- und Randbedingungen, z.B. homogene Diriclet-Randbedingungen
mit u1 = u2 ≡ 0
• Niederdimensionale Probleme wie die lineare Konvektionsgleichung oder die
Wärmeleitungsgleichung bzgl. einer Ortsvariablen (siehe Kap. 5.2)
Die Wellengleichung ∂ 2 u/∂t2 = c2 ∂ 2 /∂x2 lässt sich nach d’Alembert unter Vorgabe
zweier Anfangskurven direkt aus der allgemeinen Lösung ermitteln ([2],S.89-92). Ein
weiteres mathematsches Hilfsmittel wäre die Laplace-Transformation([2],S.102-110)
bei linearen PDE’s mit konstanten Koeffizienten.
Für alle übrigen Fälle ist eine numerische Behandlung unumgänglich.
3.2 Numerik
Wie in 5.2 für den parabolischen Typ gezeigt, sind geschlossene exakte Lösungen partieller Differentialgleichungen sind nur unter sehr vereinfachten Annahmen möglich.
Daher kommt an dieser Stelle das Finite-Differenzen-(FD-)Verfahren in Betracht.
Ziel hierbei ist es, die Differentialausdrücke durch geeignete Differenzenausdrücke
zu ersetzen. Sie sollten der wahren” Lösung möglichst nahe kommen und zugleich
”
gute Stabilitätseigenschaften aufweisen. Unvermeidliche Rundungsfehler aufgrund
der begrenzten Speichergröße für die Zahlenrepräentation und wegen der Diskrepanz zwischen exakter und numerischer Lösung sollten sich im Laufe des Verfahrens
nicht beliebig aufakkumukieren können.
An dieser Stelle beschränkt man sich auf Lösungsfunktionen der Form
u:Ω→R
mit (t, z) ∈ Ω ⊂ R2 ,
die auf dem Gebiet [0, N ] × Ω = [0, L] definiert sind.
3.2.1 Übergang zu finiten Differenzen
Wichtigstes Instrumentarium in diesem Zusammenhang bildet der Taylor’sche Satz.
Eine hinreichend oft differenzierbare, stetige Funktion u : Ω → R kann in der Umgebung von einem Punkt zl ∈ [0, L] (oder analog für tn ∈ [0, T ]) durch entsprechende
Taylorreihen-Elemente approximiert werden:
u(tn , zl +dz) = u(tn , zl )+dz
∂u(tn , zl ) 1 2 ∂ 2 u(tn , zl ) 1 3 ∂ 3 u(tn , zl )
+ dz
+O((dz)4 )
+ dz
2
3
∂z
2!
∂z
3!
∂z
(3.3)
O((dz)4 ) steht stellvertretend für alle übrigen Glieder, deren Ordnung mindestens
vier entsprechen, also Potenzen≥ 4 enthalten.
3.2. NUMERIK
25
Möchte man Differenzenausdrücke aus den Taylorreihenelementen entwickeln, die
auf dem gesamten beschränkten Definitionsbereich gültig sind und konstante Schrittweiten enthalten, kommt dies einer Diskretisierung von Ω gleich. Man definiere hierzu das äquistante Gitter folgendermaßen:
tn = t0 + n · dt
für n = 1, 2, . . . , N
zl = zl + l · dz
für l = 1, 2, . . . , Z
In der Regel gilt t0 = z0 = 0. Der Zeitschritt ist dt, der des Raumes dz. Sie legen
jeweils die Anzahl der Unterteilungen des Definitionsbereichs fest (lt = T /dt,lz =
L/dz). Die Näherungswerte der exakten Funktion u seien mit unl bezeichnet. Grundsätzlich darf man also davon ausgehen, daß jeder diskretisierte Werte einen Index aufweist.
Diese Definition gestaltet die Schreibweise der Differenzenausdrücke übersichtlicher. Stellt man die Taylorreihe (3.3) in der folgenden Weise um:
un − unl
1 ∂ 2 u(tn , zl )
1 2 ∂ 3 u(tn , zl )
∂u(tn , zl )
= l+1
− dz
dz
−
− O(dz3 ) ,
∂z
dz
2!
∂z 2
3!
∂z 3
(3.4)
−u0
erhält man den approximativen Ausdruck u1dx
für die erste Ableitung nach z im
(exemplarisch gewählten) Punkt zl : die Vorwärtsdifferenz. Analog erhält man für
eine Taylorentwicklung mit −dx die Rückwärtsdifferenz
un − unl−1
1
∂ 2 u(tn , zl )
1 2 ∂ 3 u(tn , zl )
∂u(tn , zl )
= l
+ dz ·
−
dz
+ O(dz3 )
∂z
dz
2!
∂z 2
3!
∂z 3
(3.5)
Viele andere Differenzenausdrücke lassen sich durch Kombination von (3.4) und
(3.5) konstruieren. Addiert man beide und teilt anschließend durch zwei, erhält man
die zentrale Differenz
5
un − unl−1 1
∂u(tn , zl )
∂ 3 u(tn , zl ) 1
4 ∂ u(tn , zl )
= l+1
− (dz)2
−
(dz)
−O((dz)7 ) (3.6)
∂z
2dz
3!
∂z 3
5!
∂z 5
Eine zweite Ableitung ergibt sich ,wenn man (3.4) von (3.5) subtrahiert und dann
durch dz dividiert:
unl+1 − 2unl + unl−1 dz 2 ∂ 4 u(tn , zl )
∂ 2 u(tn , zl )
=
−
+ O((dz)4 )
2
2
4
∂z
(dz)
4!
∂z
(3.7)
- der 2. Differenzenquotient.
Es handelt sich ebenfalls um einen zentrierten Differenzenquotienten. Man wird
noch im Kapitel 5.3 erkennen, daß dieser formal - mit Ausnahme der Faktoren vor
den ui - auch dem Differenzenschema der Querdiffusion entspricht - mit einem dominierenden Faktor für den zentral liegenden Wert ul .
26
KAPITEL 3. PARTIELLE DIFFERENTIALGLEICHUNGEN
3.2.2 Konsistenz
Um ein adäquates Differenzenschema konstruieren zu können, ist es essenziell, daß
die Differentialausdrücke(-gleichungen) hinreichend gut durch Differenzenterme(gleichungen) dargestellt werden. Hilfreich ist hierbei die Einführung des sogenannten
lokalen Diskretisierungsfehlers nl - oder auch Konsistenzfehler bzw. lokaler Abbruchfehler (truncation error) genannt. Man erhält ihn, indem man die exakte Lösung
u(t, x) in die Differenzengleichung einsetzt. Man würde in der Theorie einen genauen Wert für den Diskretisierungsfehler erhalten. In der Regel ist die exakte Lösung
jedoch unbekannt. Man kann jedoch eine Abschätzung erhalten, indem man formal die exakte Lösung u : Ω → R um den Punkt (tn , zl ) ∈ R entwickelt und in
die Differentialgleichung einsetzt. Das erste Reihenglied wäre dann null, da u(tn , zl )
die ursprüngliche PDE löst. Folglich entsprechen die Restglieder der Differenzenausdrücke aus Kapitel 3.2.1 dem Konsistenzfehler.
Die Regel ist, diese - wie im vorherigen Kapitel angedeutet - in der O-Notation
zusammenzufassen. Mit O((dz)n ) möchte man ausdrücken, daß ein genäherter mathematischer Ausdruck sich von der exakten Funktion (Ausdruck) um eine Vielfaches
von (dz)n und höherer Potenzen unterscheidet.
Insofern kann man die Konsistenzfehler der oben hergeleiteten Differenzenausdrücke im Folgenden knapp formulieren mit:
nl = O((dz))
für die Vorwärts- und Rückwärtsdifferenz
nl = O((dz)2 )
für die zentrale Differenz
nl = O((dz)2 )
für den 2. Differenzenquotienten.
und
Letzterer gilt im Übrigen auch an den Gitterrändern für die Neumann-Bedingung
(siehe [31], S. 527). Grundsätzlich ist jedes Differenzenschema konsistent ([4],S.10),
wenn
nl → 0
bei dt, dz → 0
Offenbar sind Vor- wie Rückwärtsdifferenz konsistent in der Ordnung eins - und
die übrigen beiden jeweils in der Ordnung zwei. Der Konsistenzfehler des FiniteDifferenzen-Verfahrens berechnet sich aus der Summe der Konsistenzfehler eines
jeden darin enthaltenen Differenzenausdrucks. Der Betrag des Fehlers ist von der
Position xl und dem Zeitpunkt tn unabhängig, da der Konsistenzfehler über die
exakte Lösungsfunktion definiert wurde ([4], S. 10). Essenziell ist, daß dabei nl → 0
bei jeder Art von asymptotischen Verhalten von dt oder dx gilt.
3.2.3 Stabilität eines Differenzenverfahrens
Zusammen mit der Konsistenz bildet die Stabilität das zweite notwendige und hinreichende Kriterium für die Konvergenz der Differenzenschemas (Lax-ÄquivalenzKriterium,[2],S.136) gegen die exakte Lösung.
3.2. NUMERIK
27
Man spricht von einem konvergenten Differenzenverfahren von der Ordnung k in
der Maximumsnorm, wenn
||u(t, z) − ũ||∞ = max ||u(tn , zl ) − unl || ≤ C(dt + dz)k
n,l
für C ∈ R+
(3.8)
gilt. ũ beschreibt die numerische Lösung in allen Gitterpunkten, unl ist der Näherungswert für die exakte Lösung am Gitterpunkt (tn , zl ). Mit dt, dz → 0 gehen also
im Konvergenzfall die numerischen Näherungen in die exakte Lösung über. Da ein
Rechner einen Wert nur mit endlicher Stellenzahl darstellen kann und - selbst wenn
er es könnte - die Anzahl der Rechenoperationen exponentiell zunimmt, wird man
nie eine exakte Übereinstimmung erzielen können.
Andere Normen können hier ebenso verwendet werden, stellen aber eine schwächere Bedingung an
die Stabilität des Differenzenverfahrens. So hat die euklidische
pP
n
2
x ∈ Rn eine mittelnde Eigenschaft, die hochfrequente
Norm ||x||2 =
i=1 xi
Anteile in x - also betragsmäßig große Komponenten in x - dämpft.
Damit ein numerisches Verfahren stabil ist, sollte sich eine anfängliche Störung
(bedingt durch die endlichen Schrittweiten) zumindest nicht beliebig aufsummieren.
(n)
Man muß daher fordern, daß die Größen ul innerhalb eines beschränken Bereichs
verbleiben
||unl ||∞ ≤ C(dt, dz, u0 (x), u1 (t, 0), u2 (t, L))
∀ n = 0, 1, . . . , ∞.
(3.9)
Die obere Grenze ist sowohl von den Schrittweiten als auch den Anfangs- (u0 (t))
und Randbedingungen u1 (t, 0) und u2 (t, L) abhängig.
Die Ungleichung (3.9) rührt ursprünglich von der Behandlung eines Differenzenschemas als Cauchy-Problem her (siehe [30], S.384 und [2], S. 132-136). Unter der
(n)
Bedingung, daß alle diskreten Werte ul bzgl. der Zeit separierbar sind, kann man
das Schema als
v(n+1) = Qv(n) + q(n)
(n)
(n)
mit v(n) = (u1 , . . . , uL )T
(n)
(n)
q(n) = (q1 , . . . , qL )T Quellterm, Inhomogenität
Q ∈ RL×L
formulieren. n-fache Anwendung der Ungleichung (beginnend bei t0 ) unter Einbeziehung der Anfangs- und Randbedingungen sowie des Quellterms führen dann - wie
noch gezeigt wird - zu der allgemeinen Abschätzung (3.9), sofern der Operator Q
einer Selbstabbildung in einem Banachraum B (linear, normiert, jede Cauchy-Folge
konvergiert gegen ein x0 ∈ B) gleicht und Qn ∀n ≤ N gleichmäßig beschränkt ist.
Es gibt eine allgemein gültige Theorie über Stabilität der Differenzenverfahren
- leider jedoch nicht für jeden Anwendungsfall einen leicht durchzuführenden Algorithmus ([2],S. 136-37). Parabolische Probleme können in eine Eigenwertanalyse
28
KAPITEL 3. PARTIELLE DIFFERENTIALGLEICHUNGEN
überführt werden, wenn man mit dem Separationsansatz u(t, x) = v(t) · w(x) beginnt (siehe [12],S. 303).
Um eine Abschätzung in der Maximumsnorm bzgl. der Stabilität eines Verfahrens
für parabolische wie hyperbolische PDEs zu erhalten, wird das Maximumsprinzip
([30],S. 258-64 und [27]) angewendet.
Hierzu wird das Differenzenschema in kanonischer Schreibweise verfasst.
A(P )u(P ) −
X
B(P, Q)u(Q) = F (P )
P ∈ω
(3.10)
Q∈ω\P
Die etwas kryptisch wirkende Gleichung (3.10) stellt den Differenzenausdruck bzgl.
eines inneren Punktes P des äquidistanten Gitters
ω = {(tn , zl )|n = 1, 2, . . . , N ; l = 1, 2, . . . , L − 1}
dar. A(P ), B(P, Q) und F (P ) sind Gitterfunktion, die auf ω angewendet werden. Sie
(n)
legen letztlich fest, mit welchen Koeffizienten die einzelnen ul versehen werden.
Ein gesonderte Behandlung erfahren die Randknoten P an den äußeren Grenzen
des Gitters γ ⊂ ω ω = ω + γ
u(P ) = µ(P )
für P ∈ γ,
weil sie bereits im Voraus bekannt ist. Auf (3.10) angewendet, gilt trivialerweise
A(P ) = B(P, Q) ≡ 0 und F (P ) = µ(P ) für alle P ∈ γ. Über sie werden die
Anfangs- und die Randbedingungen definiert.
Damit die noch folgenden Aussagen des Maximumsprinzips gelten können, müssen
gewisse Vorraussetzungen erfüllt sein (bzw. werden):
(a) Zwei Gitterpunkte P1 und Pm müssen über eine Sequenz von Nachbarpunkten
P2 → · · · → Pm−1 miteinander verbunden sein:
Pi+1 = ω\ {Pi }
∀i = 1, 2, . . . , m − 1 ,
B(Pi , Pi+1 ) 6= 0
∀i = 1, 2, . . . , m − 1
mit
Dies entspricht bei parabolischen wie hyperbolischen PDEs der natürlichen
Vorstellung, alle ul zu einem bestimmten Zeitpunkt aus Werten früherer Zeitpunkte bestimmen zu wollen.
(b) Bedingung an die Gitterfunktionen:
A(P ) ≥ 0, B(P, Q) ≥ 0,
X
D(P ) := A(P ) −
B(P, Q) > 0
Q∈ω\P
(3.11)
3.2. NUMERIK
29
Folgende Bedingungen erfüllen die Kriterien des Maximumsprinzips ebenso
([30], S.264):
|A(P )| =
6 0, |B(P, Q)| =
6 0,
X
D(P ) := |A(P )| −
|B(P, Q)| > 0
(3.12)
Q∈ω\P
(c)
u(P ) 6= const.
∀P ∈ ω + γ
Das Problem kann mit Lu(P ) = D(P )u(P ) +
Lu(P ) = F (P )
P
Q∈ω\{P }
B(P, Q)(u(P ) − u(Q)) als
(3.13)
zusammengefaßt werden. Gilt Lu(P ) ≥ 0 ∀P ∈ ω und u(P ) ≥ 0 ∀p ∈ γ, so kann
u(P ) ∀P ∈ ω nicht negativ werden und ist nach oben hin gemäß
F (P ) max ||u|| ≤ max ||µ(P )|| + max P ∈ω
P ∈γ
P ∈ω+γ D(P ) (3.14)
beschränkt. Die Herleitung geschah in zwei Schritten. Die Gesamtlösung kann man
sich als Summe der Lösung der homogenen Gleichung Lu(P ) = 0 (inklusive Randpunkte) und der Lösung der inhomogenen Gleichung mit homogenen Randbedingungen µ(P ) = 0 ∀ P ∈ γ vorstellen. Im ersten Fall ergibt sich dann der erste
Summand, der andere ist die Abschätzung für die inhomogene Lösung. Hierzu muß
man lediglich die Voraussetzungen auf (3.13) anwenden und die Beträge bilden.
Anwendung wird das Maximumsprinzip in den Stabilitätsbetrachtungen des Querdiffusionsschemas in Kap. 5.3.4 finden. Für eine detailliertere Beweisführung wird
die o.g. Quelle empfohlen. Alternativ kann man prüfen, ob die Matrix des aus dem
Differenzenschema (3.10) hervorgehenden Systems algebraischer, linearer Gleichungen das sogenannte M-Kriterium erfüllt ([12],S. 20-21). Dieses Vorgehen macht eine
Abschätzung letztlich einfacher - allerdings müssen hierzu die Matrizen dünn besetzt
sein und noch einige weitere Eigenschaften erfüllt sein. Zudem ist die Beweisführung
dort nur schwer nachvollziehbar.
Eine einfache und flexible Alternative stellt die Fourierstabilitätstechnik nach von
Neumann dar. Sie zielt allerdings auf eine Stabilitätsbedingung in der euklidischen
Norm ab; folglich kann sie nur Aussagen in abgeschwächter Form gegenüber der o.g.
Abschätzung liefern. Außerdem setzt sie voraus, daß die Lösung als Superposition
von Wellenfunktionen unterschiedlicher Wellenzahl ρ darstellbar ist (Fourierreihe/integral).
X
u(t, z) =
d(t) · expiρz
(3.15)
ρ
30
mit
KAPITEL 3. PARTIELLE DIFFERENTIALGLEICHUNGEN
ρ = 2π
Wellenzahl
L
L = zL − z0
Periode in x
i
imaginäre Einheit mit i2 = −1
Falls es mehr als zwei unabhängige Variablen gibt - also t, x1 , . . . , xn−1 -, sind x und
ρ als Elemente des Rn−1 aufzufassen.
Der Ansatz funktioniert nur bei linearen, homogenen Differentialgleichungen bzw.
Differenzenausdrücken mit konstanten Koeffizienten - ohne dabei die Randbedingungen einzubeziehen. Kommt noch ein zusätzlicher Quellterm q dazu, muß dessen
Eintragsmenge über die Simulationszeit hinweg beschränkt sein.
Die Gesamtlösung ist genau dann stabil, wenn die Amplitude einer Anfangsstörung
d(0) im Laufe des Verfahrens gedämpft wird - und zwar für alle Wellenzahlen. Der
Ansatz (3.15) ist derart angelegt, daß Ort und Zeit getrennt betrachtet werden (Separationansatz).
Das Differenzenschema bzgl. eines Punktes zl̃ nimmt vektoriell folgende Gestalt
an (siehe [2],S. 133ff):
e (n+1) = Pv(n)
Pv
(3.16)
mit
v(n)
..
.
(n)
u
l̃−1
= u(n)
l̃
(n)
u
l̃+1
..
.
,
wobei die Komponentenzahl in v von der Differenzenapproximation im Punkt z0
abhängig ist. Die Indizes der beteiligten, diskretisiert vorliegenden Eigenschaften ul
werden in den Indexmengen Je ⊂ Ω für t = tn+1 und J ⊂ Ω für t = tn zusammene
e ∈ Rm×dim(J)
gefasst (Ω = {k ∈ Z|k ∈ [(n − 1)/2), n/2]}). Die Operatoren P
,P ∈
Rm×dim(J) in (3.16) sind im hier vorliegenden Fall einer PDE (m = 1) zu Vektoren ”degeneriert”. Sie setzen sich wiederum als Summe schrittweitenabhängiger
Koeffizienten bzw. konstanter Matrizen zusammen.
X
e=
e µ (dt, dz)v n+1
P
P
µ
µ∈Je
P=
X
Pµ (dt, dz)vµn
µ∈J
(3.17)
3.2. NUMERIK
31
Bei Je = {0} handelt es sich um ein rein explizites Verfahren, andernfalls implizit.
e invertierbar ist, folgt nach Umformen weiter
Sofern P
−1
e
v(n+1) = P(dt)
P(dt)v(n)
(3.18)
Unter der Annahme, daß dz in gleicher Weise gegen null strebt wie dt, kann man
diese bei den Stabilitätsbetrachtungen vernachlässigen.
Setzt man nun
(n)
vk := u(tn , xk ) = d(n) expiρ(x0 +k·dx)
und den analogen Ausdruck für t = tn+1 ein und kürzt expiρx0 heraus, so nimmt die
Iterationsvorschrift diese Form an:
d(n+1) = (
X
X
Peµ (dt) expiµϕ )−1 (
Pµ (dt) expiµϕ ) d(n)
mitϕ = dx · ρ (3.19)
µ∈J
µ∈Je
|
{z
}
F(dt,ϕ)
F(dt, ϕ) ist die sogenannte Verstärkungsmatrix, dessen Eigenwerte λi über die Stabilität des Verfahrens entscheiden. Ausgehend von der Anfangsbedingung d(0) muß
man F (dt, φ) sν -mal anwenden, um d(s) zu erhalten.
d(s) = F(dt, ϕ)sν d(0)
Das Verfahren ist für eine Folge von Differenzenoperatoren stabil im Sinne von Lax
und Richtmeyer, wenn eine von sν unabhängige Konstante K ∈ R+ existiert, derart
daß
kF(dtν , ϕ)sν k ≤ K
∀sν =
tend
dtν
lim dtν = 0
ν→∞
(3.20)
bei monoton fallenden Schrittweiten dt1 , dt2 , dt3 , . . . ([2],S.136).
Angenommen,
alle Elemente v, d werden in der euklidischen Norm
p
k ∈ {m ∈ N|m < n} gemessen, so ist eine dazu ver||v||2 = v12 + · · · + vk2
trägliche Matrixnorm
die Spektralnorm
q
t
t
||F(dt, φ)|| = λmax (F F) (siehe [2],S.138-39). F ist die transponierte, komplex
konjugierte Matrix F. Der Spektralradius %(F) = maxi |λi | steht mit der Spektralnorm in dem Verhältnis:
(%(F))s ≤ ||Fs ||
t
t
Wenn F normal im Sinne von F F = FF ist, ist nach (3.20) Stabilität gegegeben
für
|λi | ≤ 1
∀i = 1, . . . , k
(3.21)
32
KAPITEL 3. PARTIELLE DIFFERENTIALGLEICHUNGEN
Man kann die Bedingung (3.21) wegen s = tend /dt noch um lineare Terme in dt
ergänzen, ohne die Stabilität zu gefährden:
|λi | ≤ 1 + O(dt)
∀i = 1, . . . , k
(3.22)
(3.21) und (3.22) sind notwendige Bedingungen für die Stabiltät, sofern F nicht
normal ist - falls doch, gelten beide als hinreichend ([27]).
Bei der Festlegung auf ein Differenzenschema für die Querdiffusion in Kapitel
5.3 werden die hier vorwiegend theoretisch vorliegenden Betrachtungen beispielhaft
nachvollzogen.
3.2.4 Additives Differenzen-Verfahren
Bei PDEs linearen Typs kann das entsprechende Differenzenschema auch bei mehreren unabhängigen Variablen in kompakter Matrizenschreibweise formuliert werden:
(n+1) (n+1)
ṽ
Lh
(n)
= Lh ṽ(n) + Q(n) ,
(3.23)
sofern man im Voraus die numerischen Werte der Lösungsfunktion in fester Reihenfolge in einem Vektor arrangiert. Man nehme als Beispiel die Funktion
u : R3 → R
mit u = u(t, x, y)
(t, x, y) ∈ [0, tN ] × [x0 , . . . , xI ] × [y0 , . . . , yJ ]
(n)
Definiert man die Näherungswerte im Punkt (tn , xi , yj ) mit ui,j , bietet sich beispielsweise für ṽ(n) ∈ RI·J folgende Anordnung an:
(n)
(n)
(n)
(n)
(n)
(n)
(n)
(n)
ṽ(n) = (u1,1 , u1,2 , · · · , u1,J , u2,1 , u22 , · · · , u2,J , u31 , · · · , uI,J )t .
Q ∈ RI·J faßt durch Anfangsbedingungen vorgegebene Terme in den ui,j sowie Quellfunktionen q(xi , yj ) zum Zeitpunkt tn zusammen. Der Differenzenoperator
(n+1)
Lh
ist offensichtlich linear, besteht er doch aus den Koeffizienten der Linearkombinationen in den ui,j . Er entspricht einer Abbildung zwischen zwei linearen,
normierten Vektorräumen
(n+1)
Lh
: (X, ||.||a ) → (Y, ||.||b )
und ist im Sinne von
(n+1)
||Lh
ṽ||b ≤ M ||ṽ||a
∀ṽ ∈ X
(für M > 0 und einer beliebigen Norm) beschränkt - so wie es jeder linearer
Operator in einem endlichdimensionalen Raum ist ([30],S. 42).
3.2. NUMERIK
33
Sofern auf den Räumen X und Y zusätzlich ein Skalarprodukt (Lh ṽ1 , ṽ2 ) ∀v1 , v2 ∈
X mit (Lh v, v) = ||ṽ||2b definiert ist (Hilbert-Räume), muß des weiteren
||Lh ṽ||b ≥ δ||ṽ||a
(3.24)
für ein geeignetes δ > 0 gelten, damit die Matrix Lh invertierbar ist und der nächste
Zeitschritt im Verfahren vollzogen werden
kann. Diese Ungleichung ist bei positiv
PI·J
definiten Matrizen Lh = (lst ) mit |lss | ≥ t=1,t6=s ||lst || immer erfüllbar, denn
||Lh ṽ||b · ||ṽ||a
Cauchy−Bedingung
≥
pos.def.
(Lh F, ṽ)
≥
δ||ṽ||2a
Alle oben genannten Kriterien müssen erfüllt sein, damit der nächste Zeitschritt
ausgeführt werden kann. Selbst wenn dies bei dem voraussichtlich hoch komplexen
Differenzenoperator Lh gegeben wäre, muß mit einem rechenintensiven Inversionsverfahren gerechnet werden. Auf diese Schwierigkeit weist auch Brauer auf den Seiten
172-180 bzw. 167 im Falle der Wärmeleitung in zwei Raumdimensionen hin.
Die mehrdimensionale Aufgabe kann daher auf eine weniger kompliziert Weise
gelöst werden, indem man das Problem in eine Summation eindimensionaler Probleme überführt, für die es jeweils ein entsprechendes Lösungsverfahren gibt. Man
spricht in diesem Zusammenhang von additiven Differenzenverfahren oder lokal eindimensionalen Schemata ([15], S. 71-72; [30], S.591-593, S. 600). Sie bilden keine
neue Lösungsmethode für Differenzengleichungen, sondern bieten lediglich eine andere Auffassung der Differenzenschemata an sich. So kann man z.B. das CrankNicolson-Verfahren (siehe Kap. 5.3) als zweischichtiges Verfahren ansehen, wobei
der Diffusionsterm alternierend implizit und explizit approximiert wird.
Man formuliert (3.23) im Sinne der summarischen Approximation als Summe der
Einzeloperatoren
2p X
1 ṽ(n+ν/p) − ṽ(n+(ν−1)/p)
ν=1
p
dτ
= Lν ṽ
(n+(ν−1)/p)
(n+(ν−1)/p)
+Q
(s, µ)
(3.25)
Die Quellterme Q(n+(ν−1)/p) müssen ebenso differenzierbar sein wie Q(n+1) und sie
müssen der Normierungsbedingung
p
X
Q(n+(ν−1)/p) = Q(n+1)
ν=1
gehorchen ([30], S.596).
Jeder der Summanden (3.25) repräsentiert ein eindimensionales Anfangsrandwertproblem, in dem Sinne, daß jeweils nur bzgl. einer unabhängigen Variablen ein Differenzenschema gebildet und gelöst wird. Die Differenzenoperatoren reduzieren sich
hierdurch auf eine einfache Tridiagonalgestalt, so daß jeder Zeitschritt in linearer
Laufzeit abgearbeitet werden kann (siehe Kap. 5.3).
34
KAPITEL 3. PARTIELLE DIFFERENTIALGLEICHUNGEN
Dies muß in fest vorgegebener Reihenfolge ν = 1 → 2 → · · · → 2p passieren, wobei
hier eine symmetrische Anordnung mit
1
L
für 1 ≤ ν ≤ p
2 ν
Lν =
1
L
für p ≤ ν ≤ 2p
2 2p−ν+1
angewendet wird. Diese symmetrisierte Folge hat den Vorteil, daß die ursprüngliche
Konsistenz eins in der Zeit wegen der Vorwärtsdifferenz um einen Grad steigt ([30],
S. 628). Dazu müssen die Operatoren sowie die Anfangskurve ṽ(0) und die Randbedingungen hinreichend glatt sein. Diese Anordnung der Operatoren verbessert die
numerischen Ergebnisse insgesamt, denn im Allgemeinen vertauschen die Operatoren Lν ν = 1, 2, . . . , p nicht und die numerischen Lösungen unterscheiden sich - je
nach dem, welche der Anfangsrandwertaufgaben zuerst gelöst wird.
Man kann (3.25) um beliebig viele jeweils zweifach vorkommende Differenzenausdrücke bzgl. anderer unabhängiger Größen erweitern, ohne die quadratische Konsistenz in der Zeit zu gefährden - so geschehen in der um den p- (Impuls-)Transport
erweiterten Ruffolo-Gleichung (siehe Kap. 4.3) und in der Querdiffusion entlang der
zur Feldlinie orthogonalen Koordinate z (siehe Kap. 5.3).
Der Konsistenzfehler in den übrigen Variablen ist derselbe wie in der Ausgangsgleichung (3.23), da diese formal mit der summarischen Approximation identisch ist.
Das Differenzenschema bzgl. s oder µ allein muß nicht notwendigerweise die Konsistenzbedingungen erfüllen ([30], S. 592-593).
Die Bedingung an die Stabilität
max ||u(xi , yj ) − ui,j ||a ≤ C(∆x + ∆y)
i,j
mit der exakten Lösungsfunktion u in allen Gitterpunkten (xi , yj ) ergibt sich durch
Aufsummieren der Stabilitätsbedingungen, d.h. Stabilität des additiven Verfahrens
ist gegeben, wenn jeder Transport für sich stabil ist ([15],S. 72). In [30] kann man
dies auf den Seiten 610 − 614 beispielhaft bei der Behandlung der mehrdimensionalen Wärmeleitungsgleichung nachvollziehen.
4 Gleichungen interplanetaren
Transports
4.1 Transport nach Roelof
Der Transport energiereicher, geladener Teilchen in der inneren Heliospäre wird
durch die Roelof’sche Gleichung ([15],S.25-46) beschrieben. Sie ist für jene Partikel gedacht, deren Ausbreitungsgeschwindigkeit bedeutend größer ist als die des
Sonnenwindes, so daß man für diesen speziellen Fall die zusätzliche Konvektion
und adiabatische Dezelleration ([15], S.93ff) durch den Sonnenwind vernachlässgen
kann. Des weiteren bleiben Beschleunigungseffekte durch elektrische und zeitlich
variable magnetische Felder und ”Effekte höherer Ordnung” wie Gradienten- und
Krümmungsdrift und räumliche Gradienten senkrecht zum mittleren Magnetfeld
außen vor.
∂f
v(1 − µ2 ) ∂f
∂
∂f
+ vµ
+
+
∂t
∂s
2L(s) ∂µ ∂µ
∂f
D(µ)
∂µ
= Q(t, s, µ)
(4.1)
Hierbei bezeichnet f (t, s, µ) die über eine Gyration gemittelte Phasenraumdichte
(siehe (2.20)). Die PDE ist eine spezielle Ausprägung der Liouville-Gleichung und
beschreibt entsprechend der Reihenfolge der Differentialterme in (4.1) Konvektion
entlang der Magnetfeldlinie, Fokussierung an divergierenden bzw. konvergierenden
Magnetfeldern sowie Pitchwinkel-Streuuung durch Wechselwirkung der solaren Partikel mit Feldfluktuationen (siehe auch Kap 2.2). Q als Quellterm beschreibt den
meist impulsiven, kurzzeitigen Eintrag von energiereichen Ladungen nahe der Sonne.
Da die Phasenraumdichte entlang ihres zurückgelegten Weges im Phasenraum
erhalten bleiben soll, muß ihr totales Differential
∂f
ds ∂f
dµ ∂f
df
≡
+
+
=0
dt
∂t
dt ∂s
dt ∂µ
(4.2)
identisch null ergeben. Die Koeffizienten der partiellen Ableitungen für die Konvektion und Fokussierung können so wie folgt bestimmt werden:
v|| =
ds
= v cos (α) = vµ
dt
Projektion der Teilchengeschwindigkeit auf die Feldlinie
35
36
KAPITEL 4. GLEICHUNGEN INTERPLANETAREN
TRANSPORTS
Der Fokussierungsterm (µ -abhängig) kann durch die Kettenregel der Differentiation aufgelöst werden
dµ
dµ ∂B ds
=
dt
dB ∂s dt
Da das Magnetfeld der archimedischen Spirale (2.21) nur als Funktion B(r(s)) des
Radius bekannt ist, folgt weiter
dµ
dµ ∂B ∂r(s) ds
=
dt
dB ∂r ∂s dt
Setzt man nun die Ableitung der momenterhaltenden Reflexionsbedingung (2.23)
r
B
µ= 1−
Bs Magnetfeldstärke im Spiegelpunkt,
Bs
∂r B und ∂s r(s) mit
1 p
2
βr 1 + (βr) + arcsin (βr)
s(r) =
2β
(siehe [15],S. 27,Gl. 2.12) durch Nullstellenbestimmung ein, ergibt sich der Fokussierungsterm zu
v(1 − µ)2
dµ
=
dt
2L(s)
mit der Fokussierungslänge L(s) = −
B
∂s B
(4.3)
Der vierte linksseitige Term in (4.1) entspricht der Streuung an Feldfluktuationen
(siehe Kap. 2.2.3) Der Diffusionskoeffizient ([15],S.71) ist
D(µ) = A (1 − sign(µ)σ)|µ|1−q + H (1 − µ2 ),
(4.4)
wobei dessen Anwendung im Rahmen dieser Arbeit für der vereinfachten Fall
q = 1.6 und H = σ = 0 beschränkt sein soll.
Als Quellfunktion Q(t, s, µ) kommt eine zeitliche wie räumliche δ-Injektion in
Frage. Alternativ bietet sich ein zeitlicher Verlauf gemäß des Reid-Axford -Profils
tA
t
C
Q(t) = exp − −
t
t
tV
; t ≥ 0, C ∈ R+
(4.5)
Die Parameter tA und tV legen die Anstiegs- bzw. die Endphase des Injektionsprofils
fest.
Da die Tranportprozesse entlang einer Magnetfeldlinie stattfinden, bewegt man
sich ausschließlich im Eindimensionalen. Die innere Grenze, die den Fußpunkt einer
4.2. NUMERISCHE BEHANDLUNG
37
Feldlinie auf bzw. nahe der Sonnenoberfläche bildet, ist durch vollständige Reflexion
der geladenen Teilchen realisiert (1. Randbedingung). Teilchen, sich auf die Sonne
zu bewegen, kehren ihre Bewegungsrichtung infolge konvergierender Feldlinie (Fokussierung) augenblicklich um. Nicht weit davon (oder gar genau dort) werden die
Teilchen dem System zugeführt. Der übrige Raum bleibt in der Anfangsphase teilchenfrei.
Für den äußeren Rand macht eine partielle Reflexion Sinn - insbesondere für den
Fall, daß sich diese und der Beobachtungsort nicht sehr weit voneinander entfernt
befinden. Bei großen Distanzen ist die Reflexionsbedingung zu vernachässigen, da in
der Regel nur wenige Teilchen innerhalb des Beoachtungszeitraums zurückgestreut
werden. Um bei der Umsetzung der Transportgleichung auf dem Computer Speicherplatz und Rechenzeit zu sparen, wird üblicherweise ein Kompromiß bzgl. der
Reflexion und der Wahl der äußeren Grenze getroffen.
4.2 Numerische Behandlung
Das mehrdimensionale Problem des interplanetaren Transports kann nicht analytisch - außer unter vereinfachenden Annahmen - gelöst werden. Folglich wurde ein
Finite-Differenzen-Verfahren konstruiert, das ein Diskretisierung des Phasenraums
nötig macht.
µ−Gitter : µi = −1 + (i + 21 )∆µ i = 0, 1, . . . , I − 1
s−Gitter :
sj = j∆s
j = 0, 1, . . . , J − 1
n
τ −Gitter :
τ = n∆τ
n = 0, 1, . . . , N
(4.6)
wobei die Zeit t durch den Faktor der konstanten Teilchengeschwindigkeit v umskaliert wurde und somit in der Dimension [AU ] auftritt. Die Notation wurde von
Hatzky übernommen.
Bei der Konstruktion der verschiedenen Differenzenverfahren gilt als oberste Maxime die Einhaltung physikalischer Prinzipen (Konservativität), von denen die Erhaltungsgesetzte die wichtigsten sind. Erst danach folgen die Konsistenz- und Stabilitätsordnung, wobei bzgl. letzterem eine quadratische Ordnung angestrebt ist.
Der s-Transport
Die korrespondierende lineare, hyperbolischen PDE beschreibt Konvektion für
konstante Ausbreitungsbedingungen, die durch das gängige explizite first-orderupwind -Verfahren approximiert wird ([15], S.48-60). Erster Ordnung bedeutet in
diesem Fall, daß die PDE
∂ξ
∂ξ
+a
=0
∂τ
∂s
(4.7)
KAPITEL 4. GLEICHUNGEN INTERPLANETAREN
TRANSPORTS
38
nur konstante Koeffizienten enthält. Formal enspricht der Differenzenausdruck der
zweifachen Anwendung der Vor- bzw. Rückwärtsdifferenz - die Konsistenzordnung
ist daher eins.
(n+1)
= ξj
(n+1)
= ξj
ξj
ξj
(n)
− γi (ξj
(n)
− ξj−1 )
(n)
− γi (ξj
(n)
für µi ≥ 0
(n)
− ξj+1 )
(n)
für µi < 0
(4.8)
Da sich die neuen Werte unmittelbar aus denen der ”alten” Zeitschicht ergeben,
reduziert sich Aufwand auf N · (J − 1) Rechenoperationen - bedeutet also linearer
Aufwand pro Zeitschritt. Nach der Lax-Richtmyer-Theorie lässt sich die Stabilitätsbedingung unmittelbar ablesen. Die Verstärkungsmatrix (vgl. 3.19) ist auf 1 × 1
reduziert und dessen Eintrag entspricht dem Eigenwert - der skalaren CFL-Zahl
, die die Courant-Friedrichs-Levy-Bedingung
γi = µi ∆τ
∆s
max |γi | ≤ 1
i
erfüllen muß, damit das Verfahren auch konvergent in der Maximumsnorm ist. Zudem erfüllt es trivialerweise das Maximumsprinzip (inverse Monotonie), was anschaulich auch bedeutet, daß die numerischen Werte im Bereich
(n)
inf ξj
j
(n+1)
≤ ξj
(n)
≤ sup ξj
∀n = 0, 1, . . . , N
j
bleiben, womit das Verfahren konservativ ist. Die Schrittweiten wurden zudem derart gewählt, daß es in den betragsmäßig größten Werten des Pitchwinkels, also in
den äußeren Punkten des µ-Gitters exakt ist (µ1/2 = µI−1/2 = 1).
Im Bereich starker Gradienten neigt das Schema zu starken Schwingungen aufgrund der dem first-order-upwind-Verfahren innewohnenden Dispersions- und Dissipationsfehler. Damit es dennoch konservativ bleibt, wurde das Fluxlimiterverfahren
angewendet. Man benutzt das Lax-Wendroff-Schema zweiter Ordnung, welches das
first-order-Verfahren impliziert.
(n+1)
ξj
(n)
= ξj
γ 2 (n)
γ (n)
(n)
(n)
(n)
− (ξj+1 − ξj−1 ) + (ξj+1 − ξj + ξj−1 )
2
2
Es ist für ein variablen Verlauf der Geschwindigkeit a(s) geeignet ([15],S. 54) muß
aber gemäß Lax-Richtmyer die Bedingung
∆t ≤
∆x
|a(sj )|
∀j = 0, . . . , J − 1
erfüllen, um stabil zu sein ([4], S.13-14).
Man führt irreguläre Punkte j ± 1/2 ein, die den Grenzen von Elementarvolumina
entsprechen (control volume approach). Über diese Grenzen kann man die advektiven
Flüsse
(n)
Fj+1/2 = aj+1/2 ξj
1
(n)
(n)
+ aj+1/2 (1 − γj+1/2 )(ξj+1 − ξj )Φj (θj )
2
(4.9)
4.2. NUMERISCHE BEHANDLUNG
39
definieren, deren zweiter Term mit dem Fluxlimiter (monotonized-centered)
ξj − ξj−1
1 + θj
,2
mit θj =
Φ(θj ) = max 0, min 2θj ,
2
ξj+1 − ξj
versehen ist. Dieser ist von den Schrittweiten ds und dµ unabhängig, so daß es im
Gegensatz zum ursprünglich verwendeten flux corrected transport (FCT) ([15], S.
53-56) auch für kleine γi robust - dafür aber auch rechenintensiver - arbeitet. Das
Schema im Ganzen:
dτ
(n+1)
(n)
(4.10)
ξj
= ξl + (Fj+1/2 − Fj−1/2 )
ds
Dadurch verhält sich (4.10) in Regionen mit glatter Lösung in zweiter Ordnung
und neigt bei starken Gradienten wegen des Fluxlimiters nicht mehr zu Schwingungen.
Der µ-Transport
Die PDE ist ein Stellvertreter für eine lineare, parabolische Konvektions-Diffusions
Gleichung.
∂ξ
∂
∂
∂ξ
+
(b(µ)ξ) +
D(µ)
=0
(4.11)
∂t ∂µ
∂µ
∂µ
Der Fokussierungsterm wird durch die zentrale Differenz (siehe 3.6) - die Pitchwinkelstreuuung durch den 2. Differenzenquotienten approximiert. Der Konsistenzfehler
(n)
ergibt sich somit zu i = O(dτ + (dµ)2 ).
Bei hinreichend glatten Verläufen der Phasenraumdichte wird ein implizites Verfahren mit quadratischer Konvergenzordnung bzgl. der Zeit herangezogen - vorzugsweise nach Ablauf einer gewissen Zeitspanne nach Beginn der Teilcheninjektion. Die
diskreten Werte des Diffusionskoeffizienten an den Grenzen der Elementarvolumina ai±1/2 sind nicht unmittelbar bekannt und werden daher durch die Methode der
Integro-Interpolation ([15], S.64 und Kap. 5.3) ermittelt.
Stellt man die Differenzengleichungen für alle i zusammen, erhält man ein lineares
Gleichungssystem mit einer Systemmatrix in Tridiagonalgestalt, deren diagonale
Dominanz gewährleistet sein muß, damit das Verfahren stabil ist. Dies führt zu
einer Bedingung an die Fokussierungslänge: ([15],S. 62):
∆µ
(4.12)
L ≥ ∆τ 1 +
2
Eine weitere Einschränkung ergibt sich aus der Tatsache, daß die beiden µ-Terme
in der Transportgleichung sich ”konkurrierend” verhalten. Nahe der Sonne dominiert die Fokussierung, weit im interplanetaren Raum ist die Pitchwinkel-Streuuung
stärker vertreten. Es hat sich gezeigt, daß
max |
i
bi
ai±1/2
|<2
bi Koeffizient des Fokussierungsterms
KAPITEL 4. GLEICHUNGEN INTERPLANETAREN
TRANSPORTS
40
gelten muß.
In der Literatur wird dieser Sachverhalt mit singulär gestörtes Problem umschrieben ([15],S. 69). Durch zusätzliche Einführung des Parameters
χ(ρi+1/2 ) = ρi+1/2 coth ρi+1/2
mit ρi+1/2 =
b̃∆µ
2ãi+1/2
(4.13)
kann das Schema entsprechend angepasst werden. Es lautet dann für ein i ∈ {0, 1, . . . , I}
L∆µ ξi =
bi+1/2 ξi − bi−1/2 ξi−1
1 −
χ̃i+1/2 ai+1/2 (ξi+1 − ξi ) − χ̃i−1/2 ai−1/2 (ξi − ξi−1 )
2
∆µ
(∆µ)
(4.14)
Es handelt sich hierbei um eine Variante des sogenannten Il’jin-Schemas ([15], S.69),
das bei hinreichend großer Diffusion in der Ordnung zwei konvergiert, ansonsten verliert es eine Ordnung bzgl. der Maximumsnorm.
Die Injektionsfunktion
Diese ist als zeitlich variable Randbedingung beim s-Transport realisiert. Alle
hierbei einfallenden Teilchen haben eine isotropen µ-Verlauf in positiven Halbraum.
(n+1)
ξi,0
(n+1)
= ξi,0
(n)
+ γi (qr (n∆τ, µi ) − ξi,0 )
gref erlaubt für die Quellfunktion q drei Einstellungsmöglichkeiten:
1. Einen zeitlich konstanten Eintrag, der insbesondere beim Vergleich der numerischen Ergebnisse mit der stationären Lösung von Bedeutung ist.
2. Einen impulsiven, einmaligen Eintrag zu Beginn der Simulation (δ-Injektion).
3. Eine zeitlich variable Injektion gemäß des Reid-Axford -Profils:
C
tA
t
qr (t) = exp − −
t
t
tV
(4.15)
.
4.3 Erweiterter Transport nach Ruffolo
Ein kurze Vorstellung der um die Sonnenwindeffekte erweiterte Transportgleichung
- inbesondere des numerischen Teils - ist vonnöten, auch wenn das ngref -Programm
nicht direkt von ergänzenden Implementationen betroffen ist. Denn die Querdiffusionsterme sind derart formuliert, daß sie leicht an ngref angepasst werden können
4.3. ERWEITERTER TRANSPORT NACH RUFFOLO
41
(siehe Kap. 4.4).
Der Ruffolo-Transport berücksichtigt jene Teilchen, deren Geschwindigkeit v in
derselben Größenordnung wie die Sonnenwindgeschwindigkeit vSW liegt, denn hier
hat die Konvektion durch den Solarwind eine zunehmende Bedeutung. Außerdem
wachsen die Abweichwinkel zwischen der radialen Orientierung und dem Verlauf der
Feldlinie mit dem Abstand zur Sonne, so daß auch dort die Wirkung des Sonnenwindes stark ist. Mit der Expansion des Sonnenwindes spielt adiabatische Dezelleration
(p0 -Term in 4.16) eine große Rolle. Das Plasma als Gas interpretiert, kühlt es mehr
und mehr ab, da die in das Plasma eingefrorenen Magnetfelder als Streuzentren
auseinanderdriften.
∂
(µ0 v 0 )2
∂F
0 0
+
µv + 1−
vSW sec (ψ) F
∂t
∂s
c2
02
∂
01 − µ
0 ∂F
F − κ(s, µ ) 0 = Q(t, s, µ0 , p0 )
+ 0 v
∂µ
2L(s)
∂µ
∂
sec (Ψ)
d
0
02
02
− 0 p vSW
(1 − µ ) + cos (Ψ) (sec (Ψ))µ F
∂p
2L(s)
dr
(4.16)
Die Verteilungsfunktion F (t, s, µ0 , p0 ) mit den bereits bekannten Größen der Zeit, der
Raumkoordinate entlang der Feldlinie(n) und dem Pitchwinkel ist um die Impulskoordinate erweitert worden. Nicht nur dies macht den Unterschied zur Phasenraumdichte aus, sondern auch, daß sie proportional zu einer differentiellen Intensität ist,
die anstelle von Energie- in einem Impuls-Spektrum angegeben wird ([15],S. 94).
Zudem ist F in einem mit dem Sonnenwind mitbewegten Koordinatensystem angegeben, so daß entsprechende Transformationen µ 7→ µ0 bzw. p 7→ p0 durchzuführen
waren. Da das ortsfeste System zudem mit der Sonnen mitrotiert wird, liegen die
Werte der Verteilungsfunktion stets auf derselben Feldlinie. Dies auch nötig, da sonst
”im Allgemeinen die Pitchwinkelverteilungen (...) nicht erhalten bleiben ([15], S. 96).
Auch diese Transportgleichung ist durch ein additives Differenzenverfahren - ähnlich dem von Roelof in Kap. 4.1 - approximiert worden, wobei beim räumlichen wie
auch dem µ0 -Transport die nun variable Teilchengeschwindigkeit berücksichtigt wird.
Im Konkreten bedeutet dies für den Term des Pitchwinkels, daß er um den Faktor
der Teilchengeschwingkeit ergänzt wird. Außerdem bietet sich die Festlegung auf ein
Fluxlimiter-Verfahren zur Lösung des s-Transports an, da die langsamsten Teilchen
die obere Stabilitätschranke, die CFL-Zahl, weiter nach unten drücken und es bei
FCT zu der unerwünschten ”Terrassenbildung” ([15],S.55-56) kommen würde. Der
Differentialterm des p0 -Transports entspricht wie der Konvektionsterm einer hyperbolischen PDE 1. Ordnung. Die Impulswerte werden in eine logarithmische Skalierung überführt, so daß wegen der ”linearen Charakteristiken” ([15],S. 111) auch hier
der flux-corrected-transport(FCT) oder eine Fluxlimiter-Methode zur Wahl stehen.
Die einem Potenzgesetz in p0 entsprechende Anfangsbedingung ist auf das begrenzte
42
KAPITEL 4. GLEICHUNGEN INTERPLANETAREN
TRANSPORTS
Gebiet [2MeV,3.9GeV] festgelegt. Teilchen mit Energien kleiner als 2MeV verlassen
das Simulationsgebiet, ohne den Verlauf der numerischen Lösung weiter zu stören.
Die obere Grenze ist durch Teilchen, die sich annähernd mit Lichtgeschwindigkeit
fortbewegen, festgelegt. Diese Geschwindigkeit wird nur noch, so Hatzky, durch den
Dezellerationsterm beeinflußt, so daß die Rasterpunkte im oberen p0 -Gitter auch
weiterhin einem Potenzgesetz entsprechen ([15], S.114).
4.4 Implementation in GREF
Das ursprünglich in FORTRAN77 geschriebene Programm gref implementiert die
Roelofsche Transportgleichung. Die Umsetzung des numerischen Verfahrens in entsprechenden Quellcode soll an dieser Stelle nicht im Detail beschrieben werden. Interessenten, die mit der numerischen Behandlung vertraut sind, können sich direkt
am Quellcode und den darin enthaltenen Referenzen orientieren. Die überarbeitete
Fassung gemäß Fortran90-Syntax (siehe Kap. A) ist zudem um weitere Kommentare
ergänzt worden.
Hier sollen Informationen nur so weit vermittelt werden, wie es der normale Anwender für einen vernünfigen Umgang erwartet. Die Erwähnung programmiertechnischer Details tritt dann auf, wenn es um die Erweiterung des Programms um die
Querdiffusion und anderer Aktualisierungen geht.
Das Programm besteht im Ganzen aus 4 Quelldateien sowie einer zusätzlichen für
das Programm para, mit dem sich die Simulationsparameter nachträglich korrigieren lassen bzw. diese neu festgelegt werden. Insofern unterscheidet es sich in seiner
Struktur nur unwesentlich von ngref.
Der Einstieg in das Programm geschieht in der Quelldatei gref.f95. In ihr sind
einige wenige, wichtige globale Variablen festgelegt, wie z.B.: Anzahl der Stützstellen bzgl. des µ und s-Transports sowie bzgl. der Zeit und Typ des numerischen
Verfahrens. Zudem ruft gref an dieser Stelle in korrekter Reihenfolge die einzelnen
Subroutinen - allesamt in den drei übrigen Dateien ausgelagert - auf.
Bevor die eigentliche Rechnung beginnt, wird das numerische Modell in der Subroutine ginout mit entsprechenden Parametern versorgt, die aus einer formatierten
Konfigurationsdatei stammen (Defaultname: grefin.dat). Da diese für die spätere
Analyse diverser Szenarien mit zusätzlicher Querdiffusion ein wichtige Rolle spielen, sind diese in Abb. 4.4 - in rot kommentiert - beschrieben. Ausdrücke in runden
Klammern entsprechen dem Bezeichner der jeweiligen Variable im Quellcode.
Zeile 5: Es handelt sich hierbei um zwei Buchstaben mit jeweils eigener Bedeutung. Der erste kann wahlweise S oder W sein. Mit S wird angezeigt, daß die Werte
des PWDK an den Stützstellen über das S labmodell (2.27) berechnet wurden. Dessen Parameter H, σ und q sind in Zeile 6 zu finden. Andernfalls hat der Anwender
über das Programm para die Werte selbst festgelegt.
4.4. IMPLEMENTATION IN GREF
43
Abbildung 4.1: Struktur der Eingabedatei - Kommentartext in rot, variierte
Simulations-Parameter in grün
KAPITEL 4. GLEICHUNGEN INTERPLANETAREN
TRANSPORTS
44
Der zweite Buchstabe bestimmt die Art und Weise, mit der die Werte des Diffusionskoeffizienten an das numerische Verfahren angepasst wurden. Lautet das Zeichen
Y es oder J a, erfolgte im Falle des Slabmodells eine Interpolation über die IntegroMethode (5.13) und bei den von Hand eingegebenen PWDK durch lineare Interpolation. Andernfalls (Eingabe: N ) findet keine besondere Umwandlung statt.
Zeile 9: Der Buchstabe mit dem Bezeichner mea legt die Form des interplanetaren
Magnetfeldes fest. Möglich sind folgende Einstellungen:
A,a
Archimedisches Spiralfeld (siehe auch Abb. 2.1)
B,b
Archimedisches Feld mit überlagerter magnetischer Flasche
E,e
Exponentielles Feld
F,f
Archimedisches Feld mit überlagerten Fluktuationen
H,h Homogenes Feld (parallel Feldlinien)
M,m Monopolfeld (radiales Feld)
Zeile 28: ns bestimmt die räumliche Variation der Stärke der Streuung. Hier
stehen folgende Varianten zu Auswahl:
ns = 1:
Diffusionskoeffizient ist unabhängig von s.
ns = 2:
Variation entlang der Magnetfeldspirale, die ungefähr auf einen vom
radialen Abstand unabhängigen Diffusionskoeffizienten führt.
ns = 3:
Diffusionskoeffizient ist stückweise linear (Stützstellen und Werte
an den Stützstellen in den Zeilen 3134).
ns = 4:
Der räumlicher Diffusionskoeffizient stückweise konstant (Steuerung über die Zeilen 3134)
ns = 5:
Variation entlang des archimedischen Spiralfeldes ist vom Radius
abhängig.
ns = 6:
Diffusionskoeffizient für Spiralfeld ist mit statistischen Fluktuationen überlagert.
Für ein radiales und ein archimedisches Feld sind ns = 2, 6 eine vernünftige Annahme (sofern man die Polaritäten außer acht lässt). ns = 1 kommt bei einem
homogenen Feld in Frage.
Dann werden im Voraus einige Berechnungen vorgenommen, um das eigentliche
numerische Verfahren effizienter zu gestalten und Rechenoperationen zu sparen.
Zu diesen Größen gehören die ortsabhängigen Diffusionskoeffizienten und Fokussierungslängen, die zugleich mit den entsprechenden Schrittweiten und sonstigen
Größen gemäß der in Kap. 4.2 vorgestellten Differenzenverfahren (4.10) und (4.14)
4.4. IMPLEMENTATION IN GREF
45
multipliziert werden.
An dieser Stelle wurde - wie später noch gezeigt wird - der zusatzlicher Quellcode
mit entsprechenden Initialisierungen für die Querdiffusion eingefügt.
Alle Parameter und exemplarisch ausgewählte Zwischengrößen werden in die Protokolldatei (Default-Name: 001GRF.DAT ) geschrieben, um die richtige Funktionsweise der Subroutine sowie die eigenen Eingaben über die Konfigurationsdatei prüfen
zu können.
Die für das numerische Verfahren relevanten Parameter werden zudem in der
Binärdatei outbin mit dem Standard-Dateinamen 001BIN.DAT gespeichert, damit
andere Unterprogramme auf die Daten zurückgreifen können, ohne daß aufwendige
Leseoperationen in der formatierten Eingabedatei getätigt werden müssen.
Die berechneten Zwischenwerte werden über die Argumentliste der Subfunktion
den übrigen Prozeduren zur Verfügung gestellt, so auch gcalc, das im Wesentlichen
folgende Aufgaben übernimmt:
1. Einlesen aller Parameter aus der Binärdatei, die zuvor in ginout angelegt worden ist.
2. Zusammen mit den berechneten Faktoren für den s- und µ-Tranport aus der
Argumentliste wird die Phasenraumdichte über das in Kap. 4.2 beschriebene
Verfahren bestimmt.
3. Die zeitlich gemittelten Pitchwinkelverteilungen (PWVs) werden an ausgewählten Orten auf der Feldlinie durch Legendre-Polynome bis zu 4. Ordnung gefittet (siehe Kap. 2.1.5) und die entsprechenden Koeffizienten in die spaout-Datei
geschrieben.
4. Zeitgleich wird die Binärdatei outbin um die unausgewerteten, aber zeitlich
gemittelten PWVs am Beoachtungsort ergänzt, damit sie u.a. den AnalyseRoutinen lefit und intensi zur Verfügung stehen.
Hier findet sich in der überarbeiteten Fassung von gref das numerische Verfahren
des Querdiffusionstransports wieder, welches das eigentliche additive Differenzenverfahren in symmetrischer Weise erweitert.
46
KAPITEL 4. GLEICHUNGEN INTERPLANETAREN
TRANSPORTS
5 Einführung von Querdiffusion
5.1 Bisherige Entwicklung
Fits der Transportgleichung (4.1) lassen vermuten, daß der interplanetare Transport
energiereicher, geladener Teilchen vorzugsweise parallel zu den Magnetfeldlinien geschieht. Prozesse senkrecht dazu, wie die Krümmungs- und Gradientendrift, die
ihre Ursache in der Struktur des IMF oder lokaler, dem IMF überlagerter Felder
haben (vgl. [19], S. 31-32), sowie ein random walk der IMF-Linien und Resonanzstreuung (siehe [17], S.19.039), seien zu vernachlässigen. Die Ungenauigkeit in der
Bestimmung der mittleren freien Weglänge, die sich durch (simultanes) Fitten der
Transportgleichung an Intensitäts- und Anisotropieveräufe ergibt, sei weitaus größer
als der Fehler ohne die o.g. Effekte.
Es wird daher vorgeschlagen bzw. angenommen, daß der Diffusionskoeffizient D⊥
bei etwa einem Zehntel des Koeffizienten parallel zur Feldlinie anzusiedeln sei (siehe
[17], S. 19.039 und den Referenzen darin).
Nichtsdestotrotz könnte die bisherige Vernachlässigung solcher Prozesse eine Erklärung dafür sein, warum der Vergleich der λr , die sich sowohl aus den Fits als
auch der Analyse der Magnetfeldfluktuationen gemäß der Standard-Quasi-LinearenTheorie (siehe Kap. 2.2.3) ergeben, eine deutliche Abweichung zwischen diesen beiden aufweist. Dies ist unabhängig davon, ob man Unterscheidungen bzgl. der magnetischen Steifigkeit (2.6) oder der jeweiligen Ereignisse macht. Grundsätzlich waren
die gefitteten Weglängen deutlich größer als die aus der QLT (magnitude-Problem):
λQLT << λf it .
Während die QLT mit größer werdender magn. Steifigkeit P eine ebenso wachsende Weglänge prognostiziert, zeigen viele Fits zusammengenommen eine von der
Steifigkeit unabhängige Streuuung (flatness-Problem, [19], Kap. 7.4.2, S. 239). Die
Weglängen befinden sich bis auf einige wenige Ausnahmen innerhalb des Bereichs
λ ∈ [0.08, 0.3] AU (Palmer consensus range). In Event-zu-Event-Betrachtungen
können zwar beide Ansätze zur Interpretation des interplanetaren Transports die
hohe Variabilität räumlich wie zeitlich bestätigen, der jeweilige Beitrag zur Streuung fällt jedoch unterschiedlich aus. Zudem hat sich gezeigt, daß das Verhältnis der
Weglängen zw. Protonen und Elektronen nicht einheitlich gegeben werden konnte.
Die Parameteranpassung in der Transportgleichung ergab einen Wert von
λp
= 1.6 ± 0.9,
λe
47
48
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
während das aus der QLT gewonnene Verhältnis etwa viermal so groß war ([19], S.
239).
Die Ursache der λf it /λQLT -Diskrepanz könnte u.a. in einer unzureichenden Interpretation der magnetischen Feldfluktuationen liegen. Das slab-Modell geht davon
aus, daß alle in den Fluktuationen steckende Energie nur über jene transversal und
parallel zum Magnetfeld B0 sich ausbreitende Wellen unterschiedlichster Wellenzahl
k in eine entsprechende Streuung der Ladungspartikel umgesetzt wird. Der Ansatz
der dynamischen 2-D-Turbulenz ([19], S. 241) sieht zusätzlich einen streuenden Effekt senkrecht zur Feldlinie. Diese dabei beteiligten Fluktuationen würde mit einem
etwa 80% igen Anteil am Gesamtenergiegehalt der Flukatuation die Streuung durch
den slab-Ansatz verringern - also die Wellenlänge λQLT erhöhen und somit die Diskrepanz zu den gefitteten Weglängen ausgleichen. Außerdem kann man die P -(Un)Abhängigkeit der Wellenlängen im Bereich kleiner Steifigkeiten erklären, wonach
sich dort die Weglängen von Elektronen und Protonen entkoppeln (siehe Abb. 5.1).
Abbildung 5.1: Zusätzliche dynamische 2-D Turbulenz nähert die freien Weglängen
der consensus range an und reduziert das flatness-Problem auf die
Elektronen. Quelle: [1]
Beide Ansätze können jedoch auch weiterhin nur als Näherungen zur Lösung des
Diskrepanz-Problems angesehen werden. Es ist davon auszugehen, daß die Fluktuationen räumlich wie zeitlich gleichmäßig verteilt sind - ohne fest umrissene Streuzentren oder dominierende Streueffekte in einigen wenigen Richtungen bzgl. der Feldlinien. Allerdings ist der Nachweis dieser Vermutungen durch Satelliten-Messungen
nur schwer zu bestätigen, da Teilchen nur ortsfest (bzgl. des Radius) detektiert
worden sind. Möglich ist theoretisch einen hohe Variablität - mit wechselnden, un-
5.2. ERWEITERTE TRANSPORTGLEICHUNG
49
terschiedlich stark ausgeprägten Streuzentren, deren Verteilungen je nach Feldlinie
anders geartet sind.
5.2 Erweiterte Transportgleichung
In einem ersten Schritt wird die Roelof’sche-Transportgleichung (4.1) um ein weiteren diffusiven Term mit der verallgemeinerten Ortskoordinate z erweitert.
∂f v(1 − µ2 ) ∂f
∂
∂f
+ vµ +
+
∂t
∂s
2L(s) ∂µ ∂µ
∂f
∂
∂f
κ(µ)
−
κ(s, z)
= Q(t, s, z) (5.1)
∂µ
∂z
∂z
z ist hierbei als senkrecht zur betrachteten Feldlinie zu sehen. Natürlich ist dann
im Laufe der Berechnungen z der Geometrie des Magnetfeldes entsprechend anzupassen. κ(s, z) ist der Diffusionskoeffizient, dessen Betrag in der Regel ortsabhängig
ist.
Betrachtet man die Querdiffusion gesondert, also:
∂
∂f
=
∂t
∂z
∂f
κ(s, z)
∂z
.
(5.2)
Es handelt sich hierbei um eine lineare partielle Differentialgleichung 2. Ordnung
vom parabolischen Typ. Sie beschreibt formal dynamische, irreversible TransportProzesse. Sie können nicht in der Zeit zurückverfolgt werden - basieren sie doch
mikroskopisch betrachtet auf Zufallsbewegung des Mediums (Energie, Materie). Makroskopisch gesehen ist das Medium bestrebt, Konzentrationsgradienten auszugleichen. Die dabei entstehenden Flüsse werden durch die Fick’schen Gesetze mathematisch beschrieben, wonach der Diffusionsfluß dem negativen Dichtegradienten proportional ist (siehe z.B. [2],S.23-24). Einsetzen in Kontinuitätsgleichung (2.17) ohne
zusätzlichen Quellterm ergibt die o.g. Gleichung (5.2).
Eine analytische, geschlossene Lösung ist nur unter sehr vereinfachten Geometrien
und einem isotropen (konstanten) Diffusionskoeffizienten möglich. Man spricht dann
von der Wärmeleitungsgleichung. Im eindimensionalen Fall (wie auch hier) ist (5.2)
der Separationsansatz f (t, z) = T (t)Z(z) möglich ([4],S.54). Setzt man dies ein, folgt
Z 00
T0
=κ
T
Z
κ = const. , −∞ < z < +∞
mit der Anfangsbedingung
f (0, z) = m0 δ(z − z0 ),
δ Dirac’sche Deltafunktion .
Nach Farlow existiert dann die Fundamentallösung
X
λk z
λk z
2
f (t, z) =
Ak sin( √ ) + Bk cos( √ ) exp−λk t .
κ
κ
k
(5.3)
50
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
Jede Linearkombination über k löst die Differentialgleichung, da diese linear ist.
Von der Wahl der Anfangsbedingungen (initial value problem) hängt es ab, ob sich
für f (t, z) ein Ausdruck mit endlich vielen Termen ergibt. In jedem Fall genügt genau
eine Anfangsbedingung, da die Projektion jeder beliebigen Anfangskurve f (0, z) in
die t − z-Ebene der (einzigen) Charakteristik bei t = 0 entspricht.
Um diese näher spezifizieren zu können, wandelt man (5.2) mit g(t, z) = ∂f /∂z
in ein System 1. Ordnung um:
∂g
∂f
−κ
=0
∂t
∂z
∂f
=g
∂z
(5.4)
In Matrixschreibweise:
1 0
0 0
∂
∂t
f
g
+
0 −κ
1 0
∂
∂z
f
g
=
0
g
.
(5.5)
Die Determinante der charakteristischen Matrix (vgl. 3.1)
∂
∂
1 0
0 −κ
A=
+
∂t 0 0
∂z 1 0
lautet
|A| = −κ
∂
∂z
f
g
2
.
Sie ist wegen der fehlenden Zeitableitung degeneriert. Ergo gibt es nur eine Charakteristik, die zur z-Achse parallele Linien ausbildet. Dies ist, wie oben bereits
erwähnt, die Projektion der Anfangsbedingung mit t = 0 = const.
Wählt man als Anfangsbedingung eine δ-Injektion der Masse m0 im Punkt z0 ,
also
f (0, z0 ) = m0 und f (0, z) = 0 für z 6= z0
und einen konstanten Streukoeffizienten κ, ist die Angabe einer geschlossenen, analytischen Lösung möglich:
m0 −(z−z0 )2
e 4κt
f (t, z) = √
4πκt
t > 0.
(5.6)
Diese soll im weiteren Verlauf durch Vergleich mit den numerischen Lösungen
helfen, ein adäquates Differenzenverfahren und die zugehörigen Randbedingung zu
wählen (siehe Kap. 6.1.2).
5.2. ERWEITERTE TRANSPORTGLEICHUNG
51
Ein direkter Vergleich mit den Simulationsergebnissen senkrecht zu Feldlinie am
Beoachtungsort verbietet sich jedoch, da zu jedem Zeitpunkt solare Partikel durch
diverse Prozesse in das System hinein- bzw. herausgetragen werden.
Es ist außerdem anzunehmen, daß der Diffusionskoeffizient in den z-Koordinaten
variiert, insbesondere in der komplexen Magnetfeld-Geometrie des IMF. Im Rahmen
dieser Arbeit werden daher die Konsistenz- und Stabilitätseigenschaften solcher Verfahren mit variablem Diffusionskoeffizienten untersucht. Konkrete Anwendung durch
ein implementiertes Querdiffusions-Schema soll an dieser Stelle noch nicht erfolgen.
Stattdessen wird vorerst vereinfachend angenommen, daß κ in z konstant ist und
sich allenfalls mit wachsendem Abstand von der Sonne ändert. Der Maximalbetrag
des Diffusionskoeffizienten soll nun unter der in Kap. 5.1 angesprochenen Annahme, daß dieser ein Zehntel des Koeffizienten parallel zur Feldlinie beträgt, ermittelt
werden:
κ⊥ =
1
· κ||
10
(5.7)
κ|| ist jedoch nur indirekt zu ermitteln, indem man die Abhängigkeit zwischen der
mittleren freien Weglänge parallel zum Magnetfeld und dem PWDK (2.25) ausnutzt.
Reduziert man die Querdiffusion auf die Ebene der Sonnen-Ekliptik (so auch getan
im Programm gref ), lautet der parallele Streukoeffizient
1
κ|| = vλ|| ,
2
(5.8)
mit der Teilchengeschwindigkeit v in [AU/h].
Im Ganzen kann also der Querdiffusionskoeffizient mit
Z
3 2 +1 (1 − µ2 )2
v
dµ
κ⊥ =
160
κ(µ)
−1
(5.9)
angegeben werden.
Die Streuung ist in der Regel noch vom Sonnenabstand r bzw. dem Ort auf der
Feldlinie s anhängig. Daher weist der Pitchwinkeldiffusionskoeffizient noch einen
zusätzlichen Multiplikator in Form einer s-abhängigen Funktion κ(s) auf. Im Falle
eines homogenen Feldes entspricht diese einer Konstanten. Für κ(s) ≡ 1 stellt (5.9)
bereits den vollständigen Audruck für den Querdiffusions-Koeffizienten dar.
In der Geometrie des archimedischen Spiralfeldes ist κ(µ) mit dem KosinusQuadrat des Spiralwinkels Ψ zu gewichten:
κ(s) := sin2 (Ψ) =
1
vSW
ω sin(θ)r(s)
+1
,
um die Konstanz der radialen mittleren freien Weglänge λr zu erhalten (vgl. Kap.
5.1). Infolgedessen nimmt die PWDK-Streuung mit wachsendem Abstand ab . Es
wird angenommen, daß die Magnetfeld-Fluktuationen als Ursache der Diffusion im
52
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
Pitchwinkel in gleichem Maße auch senkrecht zum B-Feld wirken. Insofern kann der
Ausdruck für κ(s) übernommen werden.
Da aber die Querdiffusion vorzugsweise als ein Phänomen der äußeren Heliosphäre
auftritt, dessen Ursachen nicht nur in Feldfluktuationen liegen, wird im Hinblick auf
die Auswertung der Intensitäts- und Anisotropieprofile κ⊥ (s) mit dem Sinusquadrat
des Neigungswinkels multipliziert.
3 2
v tan2 (Ψ)
κ⊥ (s) =
160
Z
+1
−1
(1 − µ2 )2
dµ
κ(µ)
(5.10)
In den Auswertungen (Kap. 6.3) wird sich zeigen, daß diese Annahme bei der
Rekonstruktion der Messungen in kleinen Abständen zur Sonne berechtigt ist.
5.3. NUMERISCHE BEHANDLUNG
53
5.3 Numerische Behandlung
Gesucht ist ein Differenzenverfahren, das sowohl einen Approximationsfehler als auch
eine Stabilität (ohne allzu einschränkende Bedingungen an die Schrittweitenwahl)
in möglichst hoher Ordnung aufweist. Angestrebt wird die quadratische Ordnung.
Dies darf den Algorithmus jedoch nicht zu rechenintensiv gestalten. Auch soll eine
effiziente und sparsame Nutzung des Speicherplatzes berücksichtigt werden.
5.3.1 Wahl des Differenzenverfahrens
Zur Approximation der Differentialausdrücke in z wird das räumliche Gitter der
ursprünglichen Verfahrens (4.6) um die äquidistanten Gitterpunkte
{zl = l · dz | l = 0, 1, . . . , lz + 1}
dz =
Lz
> 0 konstante Schrittweite
lz + 2
ergänzt.
Im Fall eines homogenen Magnetfeldes sind diese Koordinaten linear und entsprechen dem realen Abstand zur Feldlinie. Bei einem Radialfeld (und näherungsweise
dem Spiralfeld bei geringen Sonnenabständen) handelt es sich um Winkelangaben.
Hier müsste demnach die Bogenlänge in Abhängigkeit vom Radius r ermittelt werden, um an die Distanz zur Feldlinie zu gelangen. Eine spezielle Anpassung an die
Geometrie des Spiralfeldes soll nicht Gegenstand dieser Arbeit sein. Ersatzweise
bleibt die Option, diese indirekt über die räumliche Variation des Querdiffusionskoeffizieten zu realisieren.
Der Querdiffusionstransport wird im Rahmen des additiven Differenzenverfahrens
(siehe Kap. 3.2.4) als eindimensionales Problem behandelt, d.h. es wird ein Schema
lediglich in z entworfen und um den Bruchteil 1/p eines Zeitschritts iterativ durchgeführt. Für den Transport energiereicher Partikel nach Roelof zzgl. Querdiffusion
ist p = 6. Die Schemata in s, µ und z werden wegen der symmetrischen Gestalt
des additiven Differenzenverfahrens jeweils zweimal für einen ganzen Zeitschritt im
Gesamtverfahren durchgeführt.
Da im Verfahren bzgl. z die übrigen unabhängigen Variablen (s,µ,p) konstant gehalten werden, seien bei der nun folgenden Konstruktion eines geeigneten Verfahrens
die numerischen wie analytischen Funktionswerte ξ bzw. f der Phasenraumdichte
an den Gitterpunkten (tn , zl ) mit
(n)
ξl
(n)
ξ0
(n)
bzw. fl
= f(tn , zl )
(0)
ξl
bzw. f(0, zl )
= g1 (tn ) und
bezeichnet.
(n)
ξlz+1
n = 1, 2, . . . , N ; l = 1, 2, . . . , lz
l = 1, 2, . . . , lz
= g2 (tn ) n = 0, 1, . . . , N
(Anfangsbedingung)
( Randbedingungen) (5.11)
54
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
Als Differenzenschema bietet sich für parabolische PDE’s im Allgemeinen das
3-Punkte-Schema
n+1
n
n
ξ n+1 − 2ξln+1 + ξl−1
− 2ξln + ξl−1
ξl+1
ξln+1 − ξln
= θDz l+1
+(1−θ)D
z
dt
(dz)2
(dz)2
θ ∈ [0, 1] (5.12)
an. Die Zeitableitung ist hierbei durch die Vorwärtsdifferenz und der Diffusionsterm durch den 2. Differenzenquotienten ausgedrückt worden. Die Struktur des numerischen Verfahrens für den interplanetaren Transport lässt bei der Wahl des Differenzenquotienten bzgl. t keine andere Wahl zu. Die zentrale Differenz bzgl. der
Zeit, wie bspw. im stabilen DuFort-Frankel -Schema ([2], S. 153-156), kommt daher
nicht in Betracht.
Der 2. Differenzenquotient in z wird in der Literatur typischerweise zur Approximation von Diffusionstermen herangezogen. Von der Gewichtung θ hängt es letztlich
ab, ob das Verfahren explizit oder implizit gerechnet werden soll. Im ersteren Fall
ergeben sich die neuen Werte jeweils und unmittelbar aus den alten. Beim implziten
Vorgehen müssen alle Werte zeitgleich gelöst werden. Hierzu wird ein Gleichungssystem aufgestellt, dessen Lösung bedeutend mehr Rechenoperationen benötigt als
im expliziten Fall (siehe Kap. 5.3.5).
Möchte man mit nicht konstanten (anisotropen) Diffusionskoeffienten Dz = κ(z)
arbeiten, gestalten sich die Koeffizienten im 2. Differenzenquotienten anders. Hierbei kann man von dem sogenannten control volume approach Gebrauch machen, wie
es auch Hatzky in seiner Dissertation getan hat ([15], S.64). Die Unterteilung des
Raumes in äquidistante Gitter kommt dabei einer Aufteilung in Elementarvolumina
gleich, in denen die physikalischen Gesetze des Teilchen- und Energieerhalts gelten
sollen. Diese Gesetze müssen auch im Rahmen dieser Arbeit noch vor der Wahl des
Differenzenschemas oberstes Prinzip sein. Dazu gehört auch, daß die Phasenraumdichte nicht negativ werden darf. Da der Diffusionskoeffizient an den irregulären
Punkten l± 21 eines jeden Elementarvolumens l nicht unmittelbar bekannt ist, können
die diffusiven Flüsse φl± 1 in und aus dem Element nur über eine Mittelung von D(z)
2
bestimmt werden. Dies geschah über die Integro-Interpolations-Methode
Z +1
−1
dµ
ai+1/2 = dµ
.
(5.13)
D(µ)
0
Der Ausdruck ist die Ausprägung eines pattern functionals ([30],S.146-147,461),
das ursprünglich die Bestimmung von Koeffizienten in einem homogenen Differenzenausdruck vereinheitlichen sollte. Sie können nicht beliebig bestimmt werden, da
sie die Konsistenz und Stabilität beeinflussen können ([30], S. 146). Man darf an
dieser Stelle annehmen, daß die Funktionale linear und nicht negativ sind. Damit
die Approximation 2. Ordnung im 2. Differenzenquotienten erhalten bleibt, m“ussen
an das Funktional
cl+1/2 := C[D(zl + s · dz)]
s ∈ [−1/2, +1/2]
(5.14)
5.3. NUMERISCHE BEHANDLUNG
55
die Bedingungen
1
(5.15)
2
geknüpft sein. Dies ist eine unmittelbare Folge aus der Tatsache, daß die Differerenzenausdrücke von D(z) sowie seiner Ableitung an den Grenzen der Elementarvolumia eine Konsistenz 2. Ordnung aufweisen müssen (siehe [30], S. 157-158). Man
erkennt leicht, daß die Integro-Interpolation diese Voraussetzungen erfüllt. Allerdings ist sie wegen der Intergralberechung sehr rechenintensiv. Alternativ gelingt
eine Festlegung der cl+1/2 ∀l = 0, 1, . . . , Z − 1 durch lineare Interpolation:
C[1] = 1 und C[s] =
D(zl+1 ) + D(zl )
.
(5.16)
2
Die Rechenoperationen sind in linearem Aufwand zu schaffen. Im Falle eines nahezu konstanten Diffusionskoeffizienten genügt diese Näherung, um auch die Erhaltungsgesetze zu erfüllen.
Letztlich muß vom Diffusionskoeffizienten nur gefordert werden, daß er durch
cl+1/2 := C[D(zl + s · dz)] =
0 < C1 ≤ D(s, z) < C2
∀ s, z
für zwei geeignete positive Konstanten M1 und M2 beschränkt ist ([30],S 461). Dies
entspricht u.a. dem physikalischen Grundsatz, daß die Eigenschaft f (t, z) nicht in
Richtung zunehmender Dichte fließen darf.
Der konservative Verfahren lautet somit
∂
∂z
φl+ 1 − φl− 1
∂f (t, z) 2
2
≈
κ(z)
+ O((dz)2 )
∂z
dz
z=zl
(5.17)
mit
φl+ 1
2
φl− 1
2
∂f (t, z) ξl+1 − ξl
=
≈ cl+ 1
2
∂z
dz
z=zl+ 1
2
∂f (t, z) ξl − ξl−1
=
≈ cl− 1
2
∂z
dz
z=z 1
l− 2
und im Ganzen
ξln+1 − ξln
=
dt
θ
n+1
n+1
− (cl+ 1 + cl− 1 )ξln+1 + cl− 1 ξl−1
cl+ 1 ξl+1
2
2
2
(dz)2
2
+(1−θ)
n
n
cl+ 1 ξl+1
− (cl+ 1 + cl− 1 )ξln + cl− 1 ξl−1
2
2
2
2
(dz)2
(5.18)
56
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
5.3.2 Anfangs- und Randbedingungen
Die Diskretisierung in z sieht vor, daß die ursprünglich betrachtete Feldlinie im
Programm gref bzw. ngref mittig im z-Intervall plaziert wird.
Die Anfangsbedingung soll in einem ersten Schritt ausschließlich durch das Injektionsprofil auf dieser Feldlinie geprägt sein, während der Eintrag jenseits von
z = 0 vorerst nicht statttfindet. So lassen sich, wie im Auswertungsteil (Kap. 6)
veranschaulicht, die diffusiven Prozesse quer zum Magnetfeld gut simulieren und
nachvollziehen.
Im Falle einer δ-Injektion im Punkt s = sjinj gilt also
f (t0 , s, z)|s=sj ≡ 0
∀zl mit l = 1, . . . , lz
und ∀sj mit j = 1, . . . , jinj −1, jinj +1, . . . , J.
Eine Ausnahme bildet jene s-Koordinate am Eintragsort sjinj auf der Feldlinie: Dort
gilt für das Anfangs-Diffusionsprofil in z-Koordinaten
(0)
(0)
(0)
F(t0 , sjinj ) = (ξ1 , ξ2 , . . . , ξlz )T = (0, . . . , 0,
q0
|{z}
, 0, . . . , 0)T ,
(lz+1)/2- ter Eintrag
sofern q0 die einmalige Eintragsmenge bezeichnet. Ein alternatives Querprofil auf
Höhe von sjinj ist auch möglich - wird aber nicht zu den Standard-Einstellungen des
räumlichen 2-D-Transports gehören und muß manuell vorgenommen werden (siehe
Kap. 5.4.1).
Da das Verfahren konservativ (Erhalt der Phasenraumdichte) sein soll, wird zunächst
an den äußeren Rändern z1/2 und zlz+1/2 Reflexion eingeführt. Damit verbietet sich
der Fluß von Phasenraumdichte über diese Grenzen hinaus. Der diffusive Transport ist ausschließlich durch den lokal vorhandenen räumlichen Gradienten bestimmt
(gemäß 1. Fick’schem Gesetz). Daher kann man diese Forderung durch homogene
Neumann-Randbedingungen (??) ausdrücken:
∂f ∂f =
=0
∂z z=z1/2
∂z z=zlz+1/2
Mittels Approximation durch Vorwärts-(bzw. Rückwärts-)Differenz kann man die
Randpunkte im Differenzenverfahren wegen
(n)
(n)
ξ0 = ξ1
(n)
(n)
und ξlz+1 = ξlz
eleminieren.
Für den Fall, daß keine oder nur wenige Teilchen innerhalb der Simulationszeit den
äußeren Rand erreichen, ist die Diffusion mit einem gaußkurven-artigen Profil entlang der z-Achse adäquat wiedergegeben. Hierzu müssen entweder die Streuwirkung
klein oder die Ränder ausreichend weit von der Feldlinie entfernt sein.
In der archimedischen Spiral-Geometrie des Interplanetaren Magnetfeldes des Sonnensystems nimmt der Einfluß der Querdiffusion jedoch stark zu. Es ist daher damit
5.3. NUMERISCHE BEHANDLUNG
57
zu rechnen, daß erstere oben genannte Bedingung nur in geringem Sonnenabstand also innerhalb weniger AU - erfüllt werden kann. Computertechnische Einschränkungen verbieten zudem zu viele Gitterpunkte in z. Speicherbedarf und die Anzahl der
Rechenoperationen könnten sonst u.U. zu groß werden. Gewünscht ist vorerst, die
Simulation eines Szenarios noch im Minutenbereich ablaufen lassen zu können (maximal eine halbe bzw. ganze Stunde).
Um also zu verhindern, daß im beschränkten Bereich senkrecht zur Feldlinie infolge der äußeren Reflexion zu viele Teilchen auf die mittigen Feldlinien ”zurückgestreut” werden und das Diffusionsprofil verloren geht, soll anteilig das Verlassen
solarer Partikel über den betrachteten Bereich hinaus erlaubt sein. Man setzt die
Phasenraumdichte am Rand auf
f (t, s, µ, z = z0 ) = u1 (t) ≡ 0 und f (t, s, µ, z = zlz+1 ) = u2 (t) ≡ 0,
was den homogenen Dirichlet-Bedingungen entspricht. Der Fluß über die Grenzen hinaus ist hierdurch jedoch sehr viel größer als im analytischen Falle. Das zIntervall leert sich daher schneller als der identische Ausschnitt bzgl. der analytischen
Lösungsfunktion. Daher wird der Fluß mit dem Reflexionskoeffizienten ν ∈ [0, 1] gewichtet:
∂f φ1/2 = (1 − ν) ·
∂z z=z1/2
∂f φlz+1/1 = (1 − ν) ·
∂z z=zlz+1/2
(5.19)
Für ν = 1 kann die o.g. totale Reflexion eingeführt werden. Bei ν 6= 1 ist eine
Anpassung von ν an die konstant gehaltenen Schrittweiten dt und dz sowie an κ(z),
die Anzahl der Stützstellen lz und die Simulationsdauer erforderlich. Bzgl. letzterem
aus dem Grunde, weil jede Wahl von ν 6= 1 letztlich zur Entleerung des Raumes in
z führt. Man kann diesen Zeitpunkt jedoch beliebig hinauszögern. Dieser sollte erst
weit nach Ende der eigentlichen Simulationszeit eintreten.
Alternativ oder in Kombination mit dem oben Gesagten bietet es sich an, die
Schrittweite dz an die Stärke der Streuung an Magnetfeldfluktuationen anzupassen
- möchte man eine Obergrenze an Gitterpunkten (gewählt im Sinne vertretbarer
Rechenzeiten) nicht überschreiten. Allerdings verringert sich dann mit wachsender
Schrittweite die Genauigkeit des jeweiligen numerischen Verfahrens.
Wie groß und unter welchen Annahmen ν gewählt werden kann, - und in welchem
Verhältnis dies zur Wahl der Schrittweite steht, soll Gegenstand der Kapitel 6.1.2
und 6.3 sein.
58
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
5.3.3 Konsistenz
Der Konsistenzfehler des in Kap. 5.3.1 gewählten Schemas beträgt
(a) O(dt + (dz)2 ) bei beliebigem θ 6=
(b) O((dt)2 + (dz)2 ) bei θ =
1
2
1
2
(Crank-Nicolson) .
Um dies zu beweisen, setzt man zuerst (formal) die in eine Taylorreihe entwickelte
exakte Lösungsfunktion f = f (t, z) für θ = 0 in (5.18) ein und stellt jeweils nach
.
∂ξ
den Differenzenausdrücken um. Man einige sich auf die Notation: ξ= ∂ξ
und ξ 0 = ∂z
∂t
(analog für höhere Ableitungen).
Die diskretisierte Zeitableitung entspricht der bekannten Vorwärtsdifferenz (3.4),
dessen Konsistenzfehler unmittelbar nach Umstellung der Reihenentwicklung in t zu
identifizieren ist:
(n+1)
(n)
l
=
ξl
(n)
.
...
1 .. 1
− ξl
− ξ= dt ξ + dt2 ξ +O(dt3 )
dt
2!
3!
Während dieser leicht als Fehler linearer Ordnung zu beschreiben ist, ist dies bei
(5.20) beim Differenzenausdruck der Querdiffusion nicht offensichtlich. Dieser ist
dem 2. Differenzenquotienten ähnlich. Er stellt sich aber wegen des ortsabhängigen
Diffusionskoeffizienten zzgl. der Taylorelemente etwas unübersichtlich dar:
cl−1/2 ξl−1 − (cl−1/2 + cl+1/2 )ξl + cl+1 ξl+1/2
=
dz 2
cl+1/2 − cl−1/2 0 cl−1/2 + cl+1/2 00
ξ +
ξ +
dz
2
1
1
dz(cl+1/2 − cl−1/2 )ξ 000 + dz 2 (cl−1/2 +
3!
4!
cl+1/2 )ξ 0000 + O(dz 3 )
(5.20)
Der Differenzenquotient ist durch zweifache Anwendung des zentralen Differenzenquotienten (3.6) ermittelt worden. Dasselbe Resultat erhält man, wenn man zunächst
den Differentialausdruck derart umschreibt, daß
∂ξ
∂κ(z) ∂ξ
∂2ξ
∂
κ(z)
=
·
+ κ(z) 2 .
∂z
∂z
∂z
∂z
∂z
Approximiert man den ersten Summanden durch eine zentrale Differenz und den
zweiten durch den 2. Differenzenquotienten (jeweils im Punkt zl ), so entspricht dies
formal dem Ausdruck in (5.20) in der 2. Zeile; wobei: ∂z κ(z)|z=zl = (cl+1/2 −cl−1/2 )/dz
und κ(z)|z=zl = (cl−1/2 + cl+1/2 )/2.
5.3. NUMERISCHE BEHANDLUNG
59
Subtrahiert man diesen Differential- vom Differenzenterm, ergibt sich der gesuchte
Konsistenzfehler zu
(n)
l
1
1
dz(cl+1/2 − cl−1/2 )ξ 000 + dz 2 (cl−1/2 + cl+1/2 )ξ 0000 + O(dz 3 )
3!
4!
=
(5.21)
bzw. analog für tn+1 . Er ist wie der ”normale” 2.Differenzenquotient konsistent in
der Ordnung O(dz 2 ), sofern der Diffusionskoeffizient über ein gültiges pattern Funktional (siehe 5.3.1) an den irregulären Gitterpunkten berechnet worden ist.
Um quadratische Ordnung in der Zeit des Crank-Nicolson-Verfahrens (b) zu beweisen, einige man sich zunächst darauf, den Konsistenzfehler zum Zeitpunkz tn+1
zu bestimmen. Dies verändert die Ordnung nicht, wie Chattot auf den Seiten 14-15
gezeigt hat.
Hierzu muß man wissen, daß die Transformation n 7→ n + 1 , also tn+1 = tn + dt mit
.
ξ (n) = ξ (n+1) − dt ξ
gelingt. Das Vorgehen funktioniert mit jeder stetig nach t differenzierbaren Funktion.
Das vollständige Differenzenschema zzgl. der Taylorreihenelemente für θ = 1/2
sieht dann so aus:
(n+1)
ξl
(n)
− ξl
dt
1
−
2
(
(n)
(n+1)
(n)
cl−1/2 (ξl−1 + ξl−1 ) − (cl−1/2 + cl+1/2 )(ξl
dz 2
(n+1)
+ ξl
(n)
(n+1)
) + cl+1/2 (ξl+1 + ξl+1 )
)
=
1 ..
1 ...
ξ +dt2 ξ +O(dt3 ) −
2!
3!
1 cl+1/2 − cl−1/2
∂ 0 cl−1/2 + cl+1/2
∂ 00
(2 − dt )ξ +
(2 − dt )ξ −
2
dz
∂t
2
∂t
1 cl+1/2 − cl−1/2
∂ 000 cl+1/2 + cl−1/2 2
∂ 0000
3
dz(2 + dt )ξ +
dz (2 − dt )ξ + O(dz )
2
3!
∂t
4!
∂t
(5.22)
.
ξ −dt
mit der nur hier geltenden abkürzenden Schreibweise ξ = ξ(tn+1,zl ). Man erkennt
den Differentialaudruck für die Differenzengleichung wieder. Dieser kürzt sich bei
(n+1)
der Bestimmung von l
heraus. Zudem ist darin die einfache Ableitung der Differentialgleichung nach der Zeit enthalten. Diese ist Null und fällt daher auch heraus.
Der Konsistenzfehler sieht letztlich so aus:
(n+1)
l
= dt2
cl+1/2 + cl−1/2 2
1 ...
∂
ξ +O(dt3 ) +
dz (2 + dt )ξ 0000 + O(dz 3 ) .
3!
12
∂t
(5.23)
60
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
Aus dem Produkt dt · dz 2 läßt sich nach Chattot auf Seite 16 nicht schlußfolgern,
daß dann die Konsistenzordnung eins in der Zeit vorliegt. Üblich und legitim ist in
solchen Fällen immer, dz → 0 gehen zu lassen, um die Ordnung in t zu ermitteln.
Es läßt sich also feststellen, daß das Crank-Nicolson-Verfahren sowohl in der räumlichen wie auch in der zeitlichen Schrittweite quadratisch konsistent ist. Es ist also
nach Ausschluß vieler anderer Schemata das Verfahren der Wahl, sofern es das zweite notwendige und hinreichende Kriterium für Konvergenz - die Stabilität - erfüllt.
5.3.4 Stabilität
An dieser Stelle soll zunächst eine Abschätzung in der Maximumsnorm erfolgen, da
dies auch im Falle eines sehr variablen Diffusionskoeffizienten eine sinnvolle obere
Schranke C
(n+1)
|ul
| ≤ C(dt + dz)k
C>0
∀n = 0, 1, . . . , N
ergibt, sofern die Schrittweiten es zulassen. Man verfaßt also das Differenzenschema
in kanonischer Form gemäß (3.10) für ein beliebiges θ ∈ [0, 1]:
mit
θdt θdt
(n)
(n+1)
(n+1)
(n+1)
+Fl (5.24)
= 2 cl−1/2 ξl−1 + cl+1/2 ξl+1
1 + 2 (cl−1/2 + cl+1/2 ) ξl
dz
dz
(n)
Fl
=
(1 − θ)dt
(n) (1 − θ)dt
(n)
(n)
(n+1)
1−
(c
+
c
)
ξ
+
(cl−1/2 ξl−1 +cl+1/2 ξl+1 )+dtϕl
.
l−1/2
l+1/2
l
dz2
dz2
Wegen P = (tn+1 , zl ) lauten offenbar die Koeffizienten (Netzfunktionen)
θdt
(cl−1/2 + cl+1/2 ),
dz 2
(1 − θ)dt
B1 (P, (tn+1 , zl−1 )) :=
cl−1/2 ,
dz 2
(1 − θ)dt
B2 (P, (tn+1 , zl+1 )) :=
cl+1/2 ,
dz 2
(1 − θ)dt
B3 (tn , zl ) := 1 −
(cl−1/2 + cl+1/2 ),
dz 2
(1 − θ)dt
B4 (P, (tn , zl+1 )) :=
cl−1/2 ,
dz 2
(1 − θ)dt
B5 (P, (tn , zl+1 )) :=
cl+1/2 .
dz 2
A(P ) := 1 +
(5.25)
(5.26)
5.3. NUMERISCHE BEHANDLUNG
61
Offenbar sind pro Zeitschicht drei benachbarte Punkte am Differenzenschema
(5.24) beteiligt. Man spricht daher von einem Drei-Punkte-Schema. Damit die dis(n)
kretisierten Werte ξl ∀n = 0, 1, . . . , N beschränkt bleiben, müssen zunächst die
Faktoren A und Bi i = 1, . . . , 5 derart gewählt werden, daß die Voraussetzungen des
Maximumsprinzips (3.2.3) erfüllt sind.
P
Zunächst erkennt man, daß D(P ) = A − 5i=1 Bi ≥ 1 ∀ P ∈ ω ist . Würde man
das Schema in Form eines Gleichungssystems formulieren, so wäre die Matrix bzgl.
tn+1 tridiagonal mit den Einträgen B1 , +A, B2 in jeder inneren Zeile. In den äußeren
würde, den Randbedingungen entsprechend, der linke bzw. rechte Wert entfallen.
Mit D(P ) > 0 ∀ P ∈ ω ist die Matrix demnach streng diagonal dominant.
Alle Gitterpunkte P ∈ ω = {(tn , zl )|n = 0, 1, . . . , N ; l = 0, 1, . . . , L} des Schemas
sind über (5.24) miteinander verbunden, zumal alle diskreten Werte einer Zeitschicht
gleichzeitig gelöst werden. Würde man z.B. P = (tn+1 , zl+1 ) wählen, funktioniert das
Schema in der Form (5.24) nicht.
Man kann des Weiteren von einer nicht-konstanten Lösung ausgehen. Dies wäre
der triviale Fall, der sowohl die PDE als auch das Differenzenschema exakt lösen
würde. Hier ist dann eine Stabilitätsanalyse überflüssig, da u(t, u) = const. für alle
Zeiten erhalten bleiben würde, ohne daß sich infolge einer endlichen Zahlenrepräsentation eines Computers Anfangsstörungen aufakkumulieren.
Auch gilt u(P ) ≥ 0, da im Zusammenhang mit den Erhaltungsgesetzen für die
Phasenraumdichte gefordert wurde, daß diese nicht negativ werden darf.
(n)
Eine Restriktion an die Schrittweiten gibt es für den Koeffizienten B3 von ξl :
Damit dieser nicht negativ wird, muß
1
(1 − θ)C2 dt
≤
2
dz
2
mit C2 = max cl+1/2 , cl−1/2
(5.27)
l
erfüllt sein.
Damit sind alle notwendigen Bedingungen für Stabilität in der Maximumsnorm
gegeben und man kann feststellen, daß die numerisch berechnete Phasenraumdichte
für jeden Verfahrenschritt positiv bleibt und eine obere Grenze mit
(n+1)
max |ξl
l
(n)
(n)
(n)
(n)
| ≤ max |Fl | = max |ξl |+max(|u1 (tn )|, |u2 (tn )|)+dt max φl +dt max |ϕl |
l
l
l
l
(5.28)
besitzt.
Wendet man diese Ungleichung für jeden Zeitschritt n = 0, 1, . . . , N an, so ergibt
sich:
X
(N +1)
(0)
max |ξl
| ≤ max |f0 (z)|+max max |u1 (tk )|, max |u2 (tk )| +dt
max |ϕl | .
l
z
k
k
n=0,...,N
l
62
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
(5.29)
Wegen der homogenen Dirichlet-Randbedingungen (vgl. Kap. 5.3.2) und der Ho(n)
mogenität des Querdiffusions-Verfahrens (ϕl ≡ 0 ∀l, n) vereinfacht sich die Abschätzung
zu:
(N +1)
max |ξl
(n)
| ≤ max |f0 (z)| + max fz̃
z
l
n
.
(5.30)
Zwischenfazit: Ist also die Anfangskurve f0 (z) räumlich-, die Randbedingungen
u1 (t) und u2 (t) zeitlich beschränkt und erfüllen die Schrittweiten das Stabilitätskriterium (5.27), so ist das gewichtete 3-Punkte-Schema (5.18) stabil bzgl.
der Maximumsnorm.
Uneingeschränkte Stabilität ist offenbar lediglich für θ = 1 gegeben. Das Verfahren ist dann implizit und wird als Laasonen-Verfahren bezeichnet. Alle übrigen
bekannten Verfahren sind nicht stabil in der Maximumsnorm bei beliebiger Wahl
der Schrittweiten. Für θ = 0.5 (Crank-Nicolson-Verfahren) muß zum einen
dtC2
≤1
(5.31)
dz 2
gelten, zum anderen müssen die. o.g. Beschränktheit der Anfangskurve erfüllt sein.
Darauf weist auch Hatzky auf den Seiten 70-71 hin. Insbesondere in der Anfangsphase eines Ereignisses solle man ”in Bereichen(...), in denen sich sehr hohe anisotrope
Pitchwinkelverteilungen einstellen (...), zunächst mit dem rein impliziten Verfahren
rechnen, um dann später in die Crank-Nicolson-Variante überzugehen”. So kann
man zumindest anteilig die quadratische Konsistenzordnung in der Zeit (siehe Kap.
5.3.3) erhalten.
Das explizite Richardson-Verfahren (θ = 0) ist nicht zu empfehlen. Es ist nicht
maximumsstabil und die obere Grenze für die Schrittweiten-Wahl ist nur halb so
groß wie bei Crank-Nicolson.
Da das Crank-Nicolson-Verfahren bzgl. der Maximumsnorm stabil ist, kann man
zudem erwarten, daß es dies auch bzgl. jeder anderen Norm (z.B. euklidisch) ist.
Bei den beiden anderen o.g. Verfahren muß dies explizit nachgewiesen werden. Dazu
greift man auf die von-Neumann-Analyse aus Kap. 3.2.3 zurück, zumal diese auf
eine Abschätzung in der euklidischen (L2 -)Norm abzielt.
Um den Verstärkungsfaktor zu bestimmen, werden das Differenzenverfahren (5.18)
gemäß (3.16) in vektorieller Schreibweise verfasst:
θdtcl−1/2
(dz)2
(cl+1/2 +cl− 1 )θdt
−
2
(dz 2 )
θdtc
− (dzl+1/2
2)
(n+1)
ξl−1
(n+1)
=
+1
1−
· ξl
(n+1)
ξl+1
(1−θ)dtcl−1/2
(dz)2
(cl+1/2 +cl− 1 )(1−θ)dt
2
(dz)2
(1−θ)dtcl+1/2
(dz)2
(n)
ξ
l−1
· ξ (n)
.
l
(n)
ξl+1
5.3. NUMERISCHE BEHANDLUNG
63
(5.32)
Da in jedem Zeitpunkt drei, räumlich benachbarte Größen am Differenzenschema
beteilt sind, sind die Indexmengen J = Je = −1, 0, +1 identisch. Der Verstärkungsfaktor ist dann nach (3.19)
F (dt, ϕ) =
(1−θ)dtcl−1/2
(dz)2
−
exp−iϕ +1 −
θdtcl−1/2
(dz)2
exp−iϕ +
(cl+1/2 +cl− 1 )(1−θ)dt
2
(dz 2 )
(cl+1/2 +cl− 1 )θdt
2
(dz 2 )
+
+1−
(1−θ)dtcl+1/2
(dz 2 )
θdtcl+1/2
(dz 2 )
exp+iϕ
exp+iϕ
⇔
F (dt, ϕ) = θ +
1
1+
dtθ
(c
dz 2 l−1/2
+ cl+1/2 − cl−1/2 exp −iϕ − cl+1/2 expiϕ )
− 1 . (5.33)
Für einen räumlich konstanten Diffusionskoeffizienten c := cl+1/2 , ∀l = 0, . . . , lz
gilt |F (dt, ϕ)| ≤ 1 genau dann, wenn:
dt
1
(1 − 2θ) ≤ .
(5.34)
2
dz
2
Das rein explizite Verfahren nach Richardson (θ = 0) für isotrope Diffusion
schränkt die Wahl der Schrittweiten deutlich ein und sollte nicht zur Wahl stehen. Eine Halbierung von dz muß dann immer eine Viertelung des Zeitschritts mit
sich ziehen. Für θ ≥ 21 ist das Verfahren (5.12) bedingungslos stabil. Da zudem
im Speziellen für θ = 12 die Konsistenzordnung in der Zeit auf zwei steigt, sollte
das Crank-Nicolson- Verfahren bei ”glatten” Verläufen des Diffusionsprofils in zRichtung verwendet werden.
c
Im Falle eines variablen Diffusionskoeffizienten ist eine allgemeingültige Stabilitätsbedingung in Abhängigkeit von θ aus (5.33) nur schwer zu ermitteln. Dennoch
bietet sich die Analyse nach von Neumann an, weil die Alternative - die in Kapitel 3.2.3 angesprochene Eigenwertanalyse - komplizierte Matrixoperationen und die
Auswertung von langen Eigenwerten λi (dt, dz, c1−1/2 , c1+1/2 ) ∀i = 1, . . . , lz mit vielen
Fallunterscheidungen zur Folge hat (mehr Informationen hierzu unter [31], S. 552ff.).
Daher wird nun geprüft, inwiefern sich die Stabilitätsbedingungen bei θ = 0, 21
und 1 ändern, wenn man mit einem variablen Diffusionskoeffizienten rechnet. Die
folgenden Rechnung wurden allesamt mit Mathematica[33] durchgeführt.
Laasonen (θ = 1)
F (dt, ϕ) =
dz 2
dz 2 + dt(cl−1/2 + cl+1/2 − cl−1/2 e−iϕ − cl+1/2 e+iϕ )
(5.35)
64
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
|F (dt, ϕ)| = r
1
1+
(cl−1/2 +cl+1/2 )dt(1−cos (ϕ))
dz 2
2
+
(cl−1/2 −cl+1/2 )dt sin (ϕ)
dz 2
2 ≤ 1 (5.36)
Die Ungleichung (5.36) ist für jede Wahl der Schrittweite und des Diffusionskoeffizienten erfüllt, denn die erste Klammer in der Wurzel ist stets ≥ 1 und die zweite
immer ≥ 0. Daher bleibt das Laasonenverfahren auch für räumlich variable Diffusionskoeffizienten bedingungslos stabil.
Richardson (θ = 0)
F (dt, ϕ) = 1+
dt
(c
+
c
)(cos
(ϕ)
−
1)
+
i(c
−
c
)
sin
(ϕ)
(5.37)
l−1/2
l+1/2
l+1/2
l−1/2
dz 2
v
!
u
2 2
u
(c
+
c
)dt
sin
(ϕ/2)
(−cl−1/2 + cl+1/2 )dt sin (ϕ) 2
l−1/2
l+1/2
t
|F (dt, ϕ)| =
1−2
+
dz 2
dz 2
(5.38)
Formuliert man (5.38) nun in der Form
s
(cl−1/2 + cl+1/2 )dt sin (ϕ/2)2
+ dt2 h1 + dt4 h2
|F (dt, ϕ)| = 1 − 4
dz 2
(5.39)
mit
h1 = −
2
(cl−1/2 + cl+1/2 ) sin (ϕ/2)2
dz 2
und
h2 =
2
(cl−1/2 + cl+1/2 ) sin (ϕ/2)2
dz 2
2
+
2
1
(−cl−1/2 + cl+1/2 ) sin (ϕ)
.
dz 2
Abgeschwächte Stabilität in (5.39) nach von Neumann ist also gegeben, wenn alle
Glieder mit einer kleineren Ordnung als O(dt) betragsmäßig kleiner oder gleich eins
sind, also:
(cl−1/2 + cl+1/2 )dt sin (ϕ/2)2 1 − 4
≤1.
dz 2
Dies ist offenbar für
(cl−1/2 + cl+1/2 )dt
1
≤
2
dz
2
∀l = 1, . . . , lz
(5.40)
5.3. NUMERISCHE BEHANDLUNG
65
erfüllt. Die Schrittweiten stehen im gleichen Verhältnis zueinander wie bei einem
konstanten Diffusionskoeffizienten. Da nicht mit adaptiven Schrittweiten gerechnet
wird, schränkt der Maximalwert des Diffusionskoeffizienten die Wahl von dt und dz
weiter ein.
Crank-Nicolson (θ = 12 )
F (dt, ϕ) =
4dz 2
−1
2dz 2 − (cl−1/2 + cl+1/2 )dt(1 − cos (ϕ)) + i(cl−1/2 − cl+1/2 )dt sin (ϕ)
(5.41)
F (dt, ϕ) ist stets kleiner als eins, denn der Verstärkungsfaktor wird für ϕ = π
maximal
F (dt, π) =
4dz 2
4dz 2
−
1
≤
−1=1.
2dz 2 − 2(cl−1/2 + cl+1/2 )
2dz 2
Minimiert man F (dt, ϕ) mit ϕ = 0, erhält man
F (dt, 0) =
4dz 2
−1.
2dz 2 + 2(cl−1/2 + cl+1/2 )
(5.42)
Es gilt F (dt, ϕ) ≤ 1 für jede Wahl von dt, dz und cl+1/2 ∀l = 0, . . . , lz. Daher ist
bedingungslose Stabilität auch hier gegeben.
5.3.5 Lösungsverfahren
Aufgrund der guten Stabilitäts- und Konsistenzeigenschaften kommen nur die impliziten Verfahren nach Crank-Nicolson und Laasonen in Betracht. Dies läuft, wie
(n+1)
bereits in (5.5) gesehen, auf simultanes Lösen aller ξl
∀l = 1, . . . , lz in einem
tridiagonalen, linearen Gleichungssystem hinaus.
b1
a1
0
..
.
0
··· ···
0
..
..
..
.
.
b2 c 2
.
..
... ... ... ...
.
... ... ... ...
clz−1
· · · · · · 0 alz−1 blz
c1
0
(n+1)
ξ1
..
.
.
..
.
..
(n+1)
ξlz
=
(n)
(n)
F1
..
.
..
.
..
.
(5.43)
Flz
Die Gaußelimination ist ein Verfahren zur direkten Lösung eines linearen Gleichungssystems mit lz Gleichungen in lz Unbekannten (siehe [31], S. 11-26). Grundidee hierbei ist, die ursprünglich quadratische, nicht singuläre Matrix A = (ai,j )
66
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
in eine obere Dreiecksgestalt zu überführen, so daß dann anschließend die Lösung
für verschiedene b und ξ in linearer Laufzeit durch Vor- bzw. Rückwärtseinsetzen
einfach gelingt.
Im (k+1)-ten Eliminationsschritt reduziert sich das Problem auf eine Matrix A(k) =
(k)
(k)
(k)
(ai,j ) ∈ R(lz−k−1)×(lz−k−1) , indem man das lik = aik /akk -fache der k-ten Gleichung
(k)
von der i-ten abgezogen wird (∀i = k + 1, . . . , lz). Die Wahl des Pivotelements apk
ist entscheidend für die Genauigkeit des Verfahrens. Man kann auch ein anderes Element aus der Matrix A(k) wählen, wenn man eine entsprechende Zeilenvertauschung
vornimmt. Dies machst insbesondere dann Sinn, wenn das Pivotelement sehr viel
kleiner ist als die übrigen Elemente der Zeile. Dann würde den übrigen Zeilen u. U.
ein betragsmäßig hoher Wert aufaddiert, so daß es zu Stellenauslöschung kommt. Da
das System aber diagonal dominant ist, kann man aber stets nach Diagonalstrategie
(k)
vorgehen und immer den obersten Koeffizient akk wählen.
Der Aufwand aller Eliminationsschritte durch Bildung der Quotienten lij mit i −
j ≥ 0 und entsprechender Subtraktionen findet in der Größenordnung O((lz)3 ) statt.
Es wird aber kein zusätzlicher Speicherplatz benötigt, denn das Verfahren entspricht
formal einer Zerlegung von A in zwei Dreiecksmatrizen (LR-Dekomposition):
1
0
...
..
.
..
.
···
...
···
...
0
..
.
..
.
l12
.
..
..
A = LR =
.
.
..
.
..
..
..
.
.
0
llz,1 · · · · · · llz,lz−1 1
m11 m12 · · ·
.
0 m22 . .
..
..
..
.
.
.
..
..
..
.
.
.
0
··· ···
· · · m1,lz
..
...
.
..
..
.
.
..
..
.
.
0 mlz,lz
. (5.44)
Hiermit können die Matrixelemente aij sukzessiv durch die transformierten Größen
ersetzt werden.
Bei tridiagonalen Systemen läßt sich der Speicherplatzbedarf reduzieren, da lediglich Platz für die Vektoren a, b, c, ξ (n+1) und r geschaffen werden muß. Die Matrizen
L und R haben formal nur noch eine untere bzw. obere Nebendiagonale:
1 0 ··· ··· 0
m 1 c1 0 · · ·
0
..
.
.
. . . ..
.
.
l1 . . . .
0 m2 . . . .
.
.
. .
.
.
.
.
.
.
. . .. ;
.. .. ..
L = 0 .. ..
R = ..
0
. (5.45)
. .
.. . . . . . . . . 0
... . . . . . . . . . clz−1
0 · · · 0 llz−1 1
0 · · · · · · 0 mlz
Die Größen mi und mi lassen sich sukzessive gemäß Gaußalgorithmus bestimmen:
m 1 = b1
für i = 1, . . . , lz − 1 :
li = ai /mi
mi+1 = bi+1 − li · ci
(5.46)
5.3. NUMERISCHE BEHANDLUNG
67
Die Matrixelemente ci i = 1, · · · , lz − 1 bleiben bei dieser Transformation unverändert - folglich gilt r = c und es braucht kein zusätzlicher Speicherplatz reserviert werden.
Nun folgt das Rückwärts-Einsetzen Ly − t = 0 ,da neben A auch t von der
Transformation betroffen ist. Dessen transformierter Vektor wird in y zwischengespeichert.
y1 = t1
für i = 2, 3, . . . , lz :
yi = ti − li−1 · yi−1
(5.47)
Bei der Implementation werden Zerlegung und Rückwärtseinsetzen in einer Rechenschleife durchgeführt, was den Aufwand noch einmal verkürzen wird.
Schließlich kann die Phasenraumdichte ξ (n+1) durch Vorwärtseinsetzen Rξ (n+1) +
y = 0 ermittelt werden:
ξlz = −ylz /mn
füri = lz − 1, lz − 2, . . . , 1 :
ξi = −(yi + ci · ξi+1 )/mi
(5.48)
Den Algorithmen ist anzusehen, daß der Aufwand zur Lösung des Gleichungssystems von linearer Ordnung ist (Laufzeit für einen Zeitschritt) - sich also nur
um einen konstanten Faktor vom Aufwand für explizite Verfahren unterscheidet. Es
kommt noch der Vorteil hinzu, daß das Gleichungssystem nur dort zu lösen ist, wo
bereits Partikel den Raum durch feldparallele Prozesse gefüllt haben. Der Beitrag
der Querdiffusion zum Gesamtverfahren liegt zwar in der Größenordnung O(Z · J 2 ),
der Faktor im Ausdruck dieser O-Notation reduziert sich jedoch um die Häfte.
Was die Rechenzeit für ein Szenario maßgeblich in die Höhe treibt, ist auch weiterhin der Transport tangential zu den Feldlinien, wie er ursprünglich in gref implementiert wurde. Der Aufwand hierfür beträgt O(J 2 · I). Da analog jenseits der
Ursprungs-Feldlinie dasselbe Verfahren angewendet wird, muß an dieser Ausdruck
noch mit der Gitterzahl Z multipliziert werden.
Insgesamt beträgt die Laufzeit des numerischen Verfahrens der um die Querdiffusion erweiterten Transportgleichung in f (t, s, µ, z):
f (t, s, µ, z) ∈ O N · J 2 · Z(I + 1) .
68
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
5.4 Implementation in gref
Der Quellcode zur Querdiffusion wurde weitestgehend in das Modul perpdiff ausgelagert, um Ergänzungen im Originalcode des Programms gref und seiner modernisierten Fassung zu minimieren. Direkt im Quellcode von gref durchgeführte Änderungen wurden der Vollständigkeit halber zusammen mit denen in diesem Kapitel
genannten im Anhang A.2.4 protokolliert.
5.4.1 Zusätzliche Parameter
Die eigentliche Rechengröße - die Phasenraumdichte entlang der Feldlinie - wird
auch weiterhin in einem separaten mehrdimensionalen Array verwaltet. Sie wird um
ein Array uz ergänzt, das die Phasenraumdichte jenseits der Feldlinie enthält.
Hier ein Überblick über alle relevanten Größen bzgl. der numerischen Behandlung
von Querdiffusion:
dz
Konstante Schrittweite in z-Richtung. Im homogenen Feld ist diese in AU
angegeben - im Radialfeld als Winkel in ◦ .
lz
Anzahl der Stützstellen bzgl. z; Default: lz = 1001
perpdif f ac Koeffizienten des Querdiffusionsschemas: θ κ⊥dz(s)dt
für θ = 1, 21
2
uz
Phasenraumdichte f (t, s, µ, p, z)|z6=0,t=tn jenseits der ursprünglichen Feldlinie zu einem festen Zeitpunkt tn
zlocs
Anzahl der räumlich äquidistanten Ausgaben in z-Richtung
zf rac
Reflexionskoeffizient ν an den Rändern ν ∈ [0, 1]
zsorce
Diskretisierte Werte der Quellfunktion für z 6= 0; Standardmäßig sieht man
keine Injektion von Partikeln jenseits von z = 0 vor. Abweichungen davon
müssen manuell vorgenommen werden.
zspaout
Name der plotfähigen Ausgabedatei, die die omnidirektionale Intensität und
Anisotropie 1. Ordnung senkrecht zum Magnetfeld bzgl. des Ausgabeortes
sout zum Zeitpunkt t = tend enthält.
Das Verfahren und dessen mehrdimensionales Gitter sind derart angelegt, daß
die ursprüngliche Feldlinie mittig im z-Bereich plaziert ist. Daher sollte lz einen
ungeraden Wert aufweisen. Dann gibt es jeweils pro Richtung (lz−1)/2 Gitterpunkte
in z.
5.4. IMPLEMENTATION IN GREF
69
Die Parameter dz, lz, zlocs, zf rac und zspaout müssen nicht manuell im Quellcode abgeändert werden, sondern werden in der genannten Reihenfolge aus den letzten
beiden Zeilen der Konfigurationsdatei (Z. 41-42) ausgelesen (siehe auch Abb. 4.4).
70
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
Die Parameter der Querdiffusion werden beim Aufruf der Routine
subroutine init(dt, lt, lls, lmu, llp, speed, ohh, qq, sigg, &
kappa_parallel, kappa_r, ns)
mit
dt
lt
lls
lmu
llp
ns
speed
ohh, qq, sigg
kappa parallel
kappa r
Zeitschritt in [AU] (in GREF mit speed multipliziert)
Maximale Anzahl an Zeitschritten (nur für Quellfunktion relevant)
Anzahl der Stützstellen entlang der Feldlinie
Anzahl der µ-Stützstellen
Anzahl der Impulsstützstellen
s-Abhängigkeit der Querdiffusion
Teilchengeschwindigkeit in [AU/h]
Parameter des PWDK (default: 0.0, 1.6, 0.0)
Diff.-koeff. parallel zur Feldlinie
Maximalbetrag des PWDK (siehe ginout)
mit entsprechenden Werten versehen und der Querdiffusionskoeffizient bestimmt
(vgl. Kap. 5.2). Dies muß im Unterprogramm ginout geschehen, nachdem die sAbhängigkeit des PWDK ermittelt worden ist.
Einige Größen müssen aus dem gref-Programm übernommen werden - möchte
man die strikte Trennung zwischen Querdiffusion und dem Originalcode beibehalten. Manche von ihnen werden erst in gcalc berechnet, so daß ein weiterer Initialisierungsaufruf in gcalc mit
subroutine init2(muneg, mupos, frac, akh, &
eta, tdsmu, focfac, r2l)
nötig wird. Die Bezeichner in der Argumentliste sind aus gref bekannt.
Hier sei noch angemerkt, daß die Faktoren des Transports in z (in perpdiffac (vgl.
5.4.1)) wegen der Gewichtung θ = 12 um denselben Faktor kleiner sein müssen.
5.4.2 Differenzenschemata
Der zusätzliche Transport senkrecht zum Magnetfeld erhöht den Phasenraum um
eine Dimension. Der Transport in s und µ - implementiert in der Routine gcalc muß daher analog parallel zur ursprünglichen Feldlinie stattfinden.
Dies gewährleisten die
subroutine nextRoelofSStep(kk, jmax)
für die Konvektion und die
subroutine nextRoelofMuStep(kk, jk, jmax)
5.4. IMPLEMENTATION IN GREF
71
für die Fokussierung und Pitchwinkel-Streuuung. Der Code ist im wesentlichen mit
jenem aus gcalc identisch. Die Operationen werden jedoch auf anderen Datenstrukturen ausgeführt.
Die Ganzzahl jk bezeichnet jenen Index im s-Array, ab dem vom Crank-NicolsonVerfahren in das Laasonen-Verfahren gewechselt wird. jmax ist ein Index desselben
Feldes. Jenseits davon ist der Phasenraum noch leer, so daß hier noch keine Berechnungen in µ und z vollzogen werden müssen.
Die eigentliche Querdiffusion für den konstanten Diffusionkoeffizienten κ⊥ (s) wurde in der
subroutine nextRoelofZStep(kk, jk, jmax, u)
implementiert (wahlweise Crank-Nicolson und/oder Laasonen). Jeder Aufruf entspricht einem Verfahrensschritt in der Querdiffusion bzgl. jeder Position s senkrecht
zur Feldlinie, sofern bereits solare Partikel durch Prozesse entlang der Feldlinie an
s vorbeigezogen sind. Teilchen unterschiedlichen Neigungswinkels erfahren hierbei
diesselbe Streuwirkung. Die Phasendichte auf der mittigen Feldlinie -u- ist sowohl
Ein- wie Ausgabeparameter, da die Struktur des originalen Programms ungetastet
bleiben soll.
Der Impulsindex kk verät, daß alle drei Subroutinen so angepasst werden können,
daß sie auch in ngref integriert werden können. Für k = 1 wird der Transport ohne
Sonnenwindeffekte realisiert. Im Fall k > 1 werden die Datenstrukturen bei zusätzlicher Impulsabhängigkeit entsprechend erweitert (siehe z.B. eta, tdsmu). Geringfügige Ergänzungen sind dennoch notwendig - so muß für den Konvektionsteil die Phase
berücksichtigt werden, in der die Partikel mit µ < 0 infolge des Sonnenwindes ihre
Bewegungsrichtung umkehren. Beim µ-Transport sind die Randbedingungen nicht
mit denen aus der Roelof-Gleichung identisch.
Aufrufe dieser drei Routinen müssen jeweils zweimal wegen des symmetrisierten
additiven Differenzenverfahrens in gcalc abgesetzt werden. Die Schemata, die den
Transport parallel zur ursprünglichen Feldlinie beschreiben, werden jeweils unmittelbar nach den Verfahren für den Transport auf der Feldlinie (z = 0) eingefügt. Die
Aufrufe für die Querdiffusion werden mittig in das Gesamtverfahren gesetzt, womit
Phasenraumdichte die Bezugsfeldlinie wechseln kann und der Transport schließlich
im Zweidimensionalen stattfindet.
5.4.3 Auswertungs- und Plotroutinen
Mit der nun zweidimensionalen Betrachtung interplanetaren Transports von SEPs
muß nun auch für den ”Beoachtungsort” eine Koordinate zusätzlich angeben werden
(sout, zout). Die Führungsfeldlinie gilt hierbei stets als Bezugslinie, d.h. für alle
Messorte auf der Linie gilt zout = 0. Mit beiden Größen werden auf die aus gref
bekannte Weise die zeitabhängigen Intensitäts- und Anisotropieproile ermittelt.
Eine grafische, raumbezogene Auswertung der Phasenraumdichte gelingt einerseits
quer zur Feldlinie am Beoachtungsort. Dazu ist lediglich der Aufruf von
72
KAPITEL 5. EINFÜHRUNG VON QUERDIFFUSION
subroutine zprofile()
nach Beendigung der Rechenschleife in gcalc abzusetzen. Sie wird in der Regel verwendet, um den Erhalt des Diffusionsprofil zu prüfen, d.h. man kann sich auf Höhe
des Beoachters vergewissern, daß noch keine solare Partikel in bedeutender Anzahl
bereits den äußeren Rand erreicht haben.
Analog kann das Profil entlang der Führungsfeldlinie mit
subroutine sprofile(u)
bestimmt werden. Als Ergebnis erhält man beim Aufruf der jeweiligen Routine eine
plotfähige Datei, die ein Spalte für die Ortsangabe, eine zweite für die omnidirektionale Intensität und eine weitere für die Anisotropie erster Ordung enthält.
Kernstück zur Auswertung des dynamischen Verhaltens des Gesamt-Transports
bildet
subroutine plot2d(u, sskp, zskp, timestamp, ns) .
Sie erzeugt eine Plotdatei der Intensitäten bzgl. eines räumlichen Gitternetzes,
dessen ”Maschenweiten” über sskp und zskp vorgegeben werden. Spaltenweise sind
hierbei im homogen Magnetfeld die Werte z, s und I (Intensität) eingetragen - für
das Radialfeld in der Reihenfolge z (als Winkel in ◦ , Partikel mit 90◦ bzw. 270◦
liegen auf der Führungsfeldlinie), I und s (als Radius). Baut man plot2d in die
Rechenschleife von gcalc ein, kann in beliebigen Zeitabständen Momentaufnahmen
vom aktuellen Zustand erzeugen. Die aktuelle Zeit wird dann an das Ende des Dateinamens geschrieben.
6 Validierung und Tests
6.1 Analyse des Querdiffusionsschemas
Die implementierten numerischen Verfahren lassen sich unabhängig vom Gesamtverfahren testen, indem man in einem gesonderten Programm manuell die s-Abhängigkeit des Diffusionskoeffizienten und eine Anfangsbedingung entlang der Feldlinie
vorgibt und anschließend iterativ die Subroutine der Querdiffusion aufruft.
6.1.1 Konservatives Verfahren ?
Geprüft wurde in einem ersten Schritt, ob das Verfahren in (nahezu) allen Zeitpunkten konservativ ist. Um starke Flüsse zwischen den Elementarvolumina zu provozieren, wurde ein ausreichend großer Diffusionskoeffizient sowie die Schrittweiten
dt = dz = 0.1 gewählt. Es wurde zudem einmalig eine Menge vom Betrag 1 in die
Mitte des Simulationsintervalls injiziert. Die äußeren Grenzen wurden eng an den
Eintragsort gezogen (100 z-Stützstellen insgesamt), um auch die dortige Reflexion
testen zu können.
Unabhängig vom Verfahren hat sich beim Rechnen mit Zahlen einfacher Genauigkeit (Datentyp: real ) gezeigt, daß Rundungseffekte an sechster bzw. siebter
Nachkommastelle und Stellenauslöschungen dazu führen, daß unbeabsichtigt Phasenraumdichte dem System zu- bzw. abgeführt wird. Besonders stark ist dieser Effekt
bei hohen diffusiven Flüssen zu beoachten. Durch Setzen der Compileroption −r8
, die eine Umstellung auf eine Zahlenrepräsentation höherer Genauigkeit bewirkt
(techn. Details siehe auch A.2), wird das Problem minimiert, jedoch nicht gänzlich ausschaltet. Grundsätzlich kann man die Lösungen linearer Gleichungssysteme
durch ein Iterationsverfahren verbessern (siehe [25], S. 47-48). Dies macht jedoch
in jedem Schritt weitere Matrizenoperationen notwendig, die die Laufzeit des Programms zusätzlich erhöhen. Daher soll hier darauf verzichtet werden.
Der Zuwachs an Phasenraumdichte ist zu vernachlässigen, da die Simulationszeiten in der Größenordnung von Stunden bzw. von ein paar Tagen liegen. Wegen der konstanten, mit der Teilchengeschwindigkeit v multiplizierten Schrittweite dt = 0.0103 (in gref ) übersteigt die Zahl der Iterationen, mit denen das Verfahren durchlaufen wird, in der Regel nicht 106 Schritte. Eigene Simulationen mit
dem Laasonen-Verfahren haben gezeigt, daß nach einem solchen Programmdurchlauf 0.0001% der Eintragsmenge mehr vorhanden war. Andere Schrittweiten wur-
73
74
KAPITEL 6. VALIDIERUNG UND TESTS
den ausprobiert; und es konnte nachgewiesen werden, daß die Differenz zur Eintragsmenge um einige Größenordnungen kleiner war als die Konvergenzordnung des
Laasonen-Verfahrens. Das Crank-Nicolson-Verfahren arbeitet ebenso verlässlich, sofern die Stabilitäts-Bedingung (5.31) erfüllt ist. Andernfalls wird die Phasenraumdichte ins Negative gezwungen. Da das Schema jedoch nach jedem Schritt die berechneten Werte mit Absolutbeträgen versieht, wird dem System künstlich Phasenraumdichte hinzugefügt.
6.1.2 Vergleich mit analytischer Lösung
Unter den vereinfachenden Bedingungen eines konstanten Diffusionskoeffizienten κ⊥
(vgl. 5.10) und eines einmaligen Eintrags der Menge m0 am Ort z0 (δ-Injektion) gibt
es die in Kap. 5.2 erwähnte geschlossene, analytische Lösung
f (t, z) = √
−(z−z0 )2
m0
e 4κ⊥ t
4πκ⊥ t
t > 0,
(6.1)
die bzgl. des Raumes mit z ∈ [−∞, +∞] unbeschränkt definiert ist.
Um zu prüfen, ob diese mit der numerischen Lösung des Querdiffusions-Transports
übereinstimmt, müssen die Intervallgrenzen bzgl. des Injektionsortes so weit nach
außen verschoben werden, daß sie während der gesamten Simulation keinen Einfluß
ausüben können. Alternativ - und stets im richtigen Verhältnis zu den Rändern gesehen - , kann man die Flüsse zwischen den Elementarzellen minimieren, um dasselbe
Ergebnis zu erhalten wie bei Erstgesagtem.
In welchem Verhältnis die Intervallbreite und Streustärke stehen, lässt sich unmittelbar aus (6.1) bestimmen: Der Abstand zd zum Injektionsort, an dem nur noch
der Bruchteil der Eintragsmenge vorhanden ist, kann durch Umstellen der oben
genannten Gleichung nach z bestimmt werden:
zd = z0 +
q
√
−ln 4πκ⊥ t 4Dz t
∈ [0, 1].
(6.2)
darf hierbei - je nach Wahl von Dz und t - eine bestimmte Obergrenze nicht
überschreiten. Man würde dann umsonst versuchen, den Ort der Phasenraumdichte
f (t, zd ) = · m0 ausfindig zu machen, da die Phasenraumdichte bereits unter diese
Menge ”diffundiert” ist.
Die Breite des z-Intervalls Lz beträgt das Doppelte des Wurzelausdrucks.
Lz = 2 · zd
(6.3)
Es handelt sich um eine Mindestangabe, die erfüllt sein muß, um für → 0 die
Möglichkeit zu eröffnen, daß man mittels eines geeigneten numerischen Verfahrens
das Diffusionsprofil approximieren kann.
6.1. ANALYSE DES QUERDIFFUSIONSSCHEMAS
75
Letztlich hängt es von der gewünschten Anzahl an Gitterpunkten, der Simulationsdauer und dem Diffusionskoeffizienten ab, wie groß die Schrittweite dz zu wählen
ist.
Modelliert man in einem homogenen Feld, wird üblicherweise in kartesischen Koordinaten gerechnet. Hierfür gelingt oben genannte Abschätzung immer, zumal der
Raum in s- bzw. z-Richtung beliebig groß gewählt werden kann. Möglich ist, daß die
Intervallbreite Lz im Rahmen des Gesamtverfahrens durchaus kleiner gewählt werden kann, wenn die Partikel schnell genug feldparallel weiter transportiert werden.
In der Radialgeometrie und in jener des archimedischen Feldes sollen die Bereiche
in z-Richtung geschlossene Kurven repräsentieren. Da man sich hier auf ein Radialfeld als eine erste Näherung für ein Spiralfeld für kleine Sonnenabstände beschränkt,
hat man es demnach mit Kreisbahnen zu tun. Insbesondere bei kleinen radialen
Abständen und hinreichend großer Diffusion erreichen die Partikel sehr schnell diesen endlich großen Rand. In die angepasste Geometrie übertragen, bedeutet dies, daß
sich Partikel, die ursprünglich auf der mittigen Ursprungsfeldlinie injiziert wurden,
auf der sonnenabgewandten Seite wieder ”treffen”. Sofern die Streuwirkung nahe
der Sonne tatsächlich so stark ist, kann dieser Vorgang durchaus physikalisch begründet werden. Numerisch müßten dann periodische Randbedingungen eingeführt
werden, um den o.g. Vorgang zu realisieren. Die symmetrische Anordnung der Gitterpunkte und ein in z 1 konstanter Diffusionskoeffizient erfüllen diese Periodizität
formal genauso, sofern an den Rändern vollständige Reflexion eingeführt wird. Dies
soll bei entsprechenden Auswertungen der Intensitäts- und Anisotropieprofile (siehe
6.3), wo in der Radial-Geometrie gerechnet wird, berücksichtigt werden. Insofern ist
keine Modifikation des Modells notwendig.
Die Wahl der Schrittweite dz im Radialfeld spielt daher nur dann eine Rolle, wenn
man das Stabiltätskriterium des Crank-Nicolson-Verfahren erfüllen muß. Dies ginge
jedoch mit restriktiven Bedingungen an die räumliche Auflösung sowie die Teilchengeschwindigkeit v und den Pitchwinkeldiffusionskoeffizienten κ(µ, s) einher. Die
beiden letzteren Größen bilden über (5.10) den Querdiffusionskoeffizienten. Es ist
zu erwarten, daß es nicht immer möglich ist, ein Teilchenereignis in vertretbarer
Simulationszeit abbilden zu können.
Möchte man aber dennoch auf eine Konvergenz 2. Ordnung bzgl. der Zeit nicht
verzichten, soll nun separat geprüft werden, ob die beiden implementierten Verfahren
die Diffusionsaufgabe bei beliebiger Wahl der Ränder erfüllen können.
1
ein symmetrisches Profil des Querdiffusions- Koeffizienten bzgl. der Ursprungsfeldlinie ist ebenso
möglich
76
KAPITEL 6. VALIDIERUNG UND TESTS
Abbildung 6.1: Vergleich zwischen analytisch ermittelten Diffusionsprofilen und
den entsprechenden numerischen Lösungen des Laasonenverfahrens.
Oben die Gegenüberstellung bei schwacher Streustärke Dz = 0.01
und unten für Dz ≈ 2 (lz = 401, = 0.01).
Abb. 6.1 stellt beispielhaft numerische und analytische Lösungen des Laasonen-
6.1. ANALYSE DES QUERDIFFUSIONSSCHEMAS
77
Verfahrens für unterschiedliche Streustärken gegenüber (5 Stunden nach der Injektion). Wie zu erwarten, muß man das z-Intervall bei wachsender Diffusion und
langer Simulationszeit entsprechend größer wählen als bei der Wahl kleiner Werte
für tend und/oder Dz . Da man hier die Gitterpunktzahl bei lz = 401 und die zeitliche Schrittweite dt = 0.0103 festhält, bedeutet dies einen höheren Wert für die
räumliche Schrittweite.
Insbesondere in der Anfangsphase und bei einer Parameter-Konfiguration, die das
Stabilitätskriterium des Crank-Nicolson-Verfahrens (in der Maximumsnorm) verletzt, zeigen sich die Vorteile des Laasonen-Verfahrens (siehe Abb. 6.2). Es ist bei
jeder Wahl der Schrittweiten und des Diffusionskoeffizienten stabil, während die
Alterative bereits nach einem Verfahrensschritt Rückgabewerte liefert, die der negativen Phasenraumdichte nahe kommen.
Sind alle Kriterien erfüllt und der Intervallabstand hinreichend groß festgelegt,
können beide Verfahren den Diffusionsprozess gut abbilden, ohne daß die Differenz
zur exakten Lösung die Konvergenzordnung verletzt.
Im Hinblick auf das Gesamtverfahren sollte das Crank-Nicolson-Schema aber erst
spät im Verfahren und weit hinter der zu erwartenden Ausbreitungsfront eingesetzt
werden, weil dort hinreichend glatte Profile der Phasenraumdichte zu erwarten sind.
Abbildung 6.2: Numerisches Verhalten von Laasonen- und Crank-NicolsonVerfahren bei identischer Wahl der Schrittweiten und des Diffusionskoeffizienten. Hier 0.01 Sekunden nach einer Delta-Injektion.
Da der Querdiffusions-Koeffizient im archimedischen Spiralfeld wegen der Gewich-
78
KAPITEL 6. VALIDIERUNG UND TESTS
tung mit dem Sinusquadrat des Spiralwinkels (vgl. (5.10)) sein Maximum im größten
simulierten Abstand aufweist, muß die Schrittweitenwahl von dz dort getroffen werden.
6.2 Querdiffusion im homogenen Magnetfeld
Abbildung 6.3: Räumliche Verteilung der omnidirektionalen Intensität in einem homogenen Magnetfeld. Oben das Profil 12 min nach einer δ-Injektion
in (0,0.05), unten nach 5 Stunden und 7 Minuten. Parameter: dz =
ds = 0.01, κ⊥ = 5.2E-03, θ = 60◦ , ν = 1.0
6.2. QUERDIFFUSION IM HOMOGENEN MAGNETFELD
79
Natürlich ist der Quertransport unter den vereinfachten Bedingungen eines homogenen Magnetfeldes konstruiert und entspricht nicht den wirklichen, physikalischen
Gegebenheiten im interplanetaren Magnetfeld. Dennoch gewinnt man eine erste gute
Abschätzung über die Stärke der Querdiffusion im Gesamtverfahren. Die Einstellungen in gref sehen hierbei den Wechsel von Phasenraumdichte zu linearer Dichte sowie einen konstanten Diffusionskoeffizienten κ⊥ vor, dessen Bestimmung über (5.8)
erfolgt. Obwohl die Feldliniendichte demzufolge konstant ist und die Fokussierung
somit verschwindet, bleibt noch der Vergleich zwischen feldparalleler und der senkrecht zum Magnetfeld stattfindenden Diffusion.
In Abbildung 6.3 ist eine Draufsicht auf die Ebene der Sonnenekliptik zu erkennen,
wobei sich die Führungsfeldlinie senkrecht und in der Mitte des Bildes befindet. Sie
”schneidet” die Sonne, die als Bezugspunkt in (x,y) = (0,0) plaziert ist. Die übrigen
Feldlinien sind parallel zur mittleren arrangiert. Demnach findet entlang der Abzisse
(x-Achse) der Quertransport statt. Für diesen wurde über (6.2) jener Abstand des
Injektionsortes vom Rand ermittelt, der auch nach 6 Stunden Simulationszeit ein
Diffusionsprofil erwarten läßt. Wie man der Grafik ansehen kann, erreichen nur wenige Partikel den äußeren Rand (die linke bzw. rechte Seite des zweidimensionalen
Plots), so daß die im vorherigen Kapitel 6.1.2 gemachte Abschätzung erfüllt werden
kann. Ein waagerechter Schnitt durch die Ebene zeigt den Verlauf einer Gaußkurve,
wie sie bei isotroper Diffusion zu erwarten ist. Da die Phasenraumdichte symmetrisch
bzgl. der mittigen Feldlinie verteilt ist und keine numerischen Artefakte aufgetreten sind, kann man dies bereits als korrekte Funktionsweise der Querdiffusion als
Bestandteil des additiven Differenzen-Schemas werten.
Beachtet man die Dynamik über volle 6 Stunden hinweg, ist zu erkennen, daß
sich der Schwerpunkt nur unwesentlich von der Sonne wegbewegt. Anfangs ist der
Transport schneller; er verlangsamt sich jedoch stetig. Der Grund hierfür ist, daß
alle Partikel mit einem positiven Pitchkosinus injiziert werden, d.h. ihre Geschwindigkeitkomponente entlang des Magnetfeldes zeigt von der Sonne weg. Die Streuung
im Pitchwinkel sorgt letztlich dafür, das am Ende die Mittelung über alle µ Null
ergibt. Der Transport hat dann in beide Richtungen - sowohl in s (feldparallel)
und z nur noch diffusiven Charakter (die von der Sonne wegtreibende Kraft der
Fokussierung fehlt ohnehin). Offenbar findet die Streuung in beide Richtungen in
derselben Größenordnung statt. Die Teilchendichte ist in jedem Raumwinkel etwa
gleich stark vertreten. Das Profil ist nur aufgrund der Injektion in den positiven
µ-Halbraum etwas verzerrt. Insofern ist mit der Gewichtung κ|| : κ⊥ = 10 : 1 eine
gute Abschätzung gelungen.
Das räumliche Profil der Anisotropie für ein s = const. zeigt, daß diese über
alle z hinweg konstant bleibt, sofern man den Genauigkeitsfehler infolge endlicher
Schrittweiten vernachlässigt. Aufgrund der Konstruktion des Querdiffusionsterms
wird bei der Streuung nicht zwischen Partikeln unterschiedlichen Neigungswinkels
unterschieden.
Die oben gewonnenen Erkenntnisse lassen sich sowohl durch den Einsatz des
Crank-Nicolson-Verfahrens als auch des Laasonenverfahrens gewinnen. Allerdings
80
KAPITEL 6. VALIDIERUNG UND TESTS
mußte bei Verletzung des Stabilitätskriteriums (5.31) aus den in Kapitel 6.1.2 erwähnten Gründen in der Anfangsphase ausschließlich auf Laasonen zurückgegriffen werden.
6.3 Fits an Intensitäts- und Anisotropieverläufe
Behält man jene Parameterkonfiguration eines Teilchenereignisses bei, die für einen
hinreichend guten Fit der Intensitäts- und Anisotropieprofile mittels des numerischen Roelof-Modells ermittelt wurden, und wendet diese nun auf das zweidimensionale Verfahren an, können die Effekte der Querdiffusion gut beoachtet werden.
Die Gültigkeit der gewonnenen Ergebnisse ist natrlich außerhalb von r = 0.5 AU
anzuzweifeln, da nur in der vereinfachten Geometrie eines Radialfeldes gerechnet
wird.
Um in vertretbarer Zeit zu Ergebnissen zu kommen, wurde hierbei lediglich eine
Winkelauflösung von dz = 2.384◦ gewählt. Das macht das Crank-Nicolson-Verfahren
für einen Vielzahl von abzubildenden Ereignissen unbrauchbar und soll daher an
dieser Stelle vorab keine Anwendung finden. Da zudem nicht abzuschätzen ist, wie
weit die Querdiffusion die SEPs von der Führungsfeldlinie treibt, wurde die gesamte
Ebene der Sonnenekliptik abgedeckt. Daher wird jede Kreisbahn im Radialfeld mit
der Anzahl lz = 151 an Gitterpunkten belegt.
Die zu erwartenden Auswirkungen zusätzlicher Querdiffusion können in Abb. 6.4
bestätigt werden. Sie zeigt entsprechende Profile des Ereignisses vom 02.03.80, deren
Rekonstruktion an dieser Stelle stellvertretend für die übrigen, gefitteten Ereignisse
nachvollzogen werden soll. Auf die Besonderheit der anderen Events wird hingewiesen. Die entsprechenden gefitteten Kurven sind im Abbildungsverzeichnis einzusehen
(Kap. B).
Wie man in Abb. 6.4 sieht, befindet sich die Intensität (unterste Kurve) stets
unterhalb jener, die man bei einer Simulation ohne Querdiffusion erhält. Die Partikel werden noch vor Erreichen des Beobachtungsortes auf der Führungsfeldlinie
derart stark gestreut, daß sie eine andere Magnetfeldlinie als Bezugslinie verwenden. Sie können daher nicht mehr detektiert werden (sofern sie nicht doch noch
zurückgestreut werden). Der Anteil jener detektierten Partikel, die im Roelof’schen
Transportmodell später eintreffen würden, ist im 2-D-Transport noch geringer, weil
die Querdiffusion länger auf sie einwirken konnte. Im Ganzen führt dies zu einem
noch stärker abfallenden Profil. Die schnellsten Teilchen erreichen den Detektor geringfügig später - auch als Folge des Quertransports.
Diese Effekte verstärken sich, wenn die Partikel stark gestreut werden und/ oder
der Beoachtungsort weit entfernt ist.
Die Anisotropie bleibt in beiden Fällen (in Rahmen der Ungenauigkeit) unverändert,
da der Quertransport nicht zwischen Partikeln unterschiedlichen Neigungswinkels
zur Feldlinie unterscheidet (vgl. Abbildungsverzeichnis B).
6.3. FITS AN INTENSITÄTS- UND ANISOTROPIEVERLÄUFE
81
Abbildung 6.4: Profile des Teilchenereignisses vom 02. März 1980 mit variierten Parametern (Werte siehe Grafik, Delta-Injektion)
Die Validität des 2-D-Modells muß sich nach den Intensitäts- und Anisotropieprofilen richten - insofern müssen geeignete Parameter angepasst werden. Die Art
der Injektion darf nicht verändert werden. Sie hat unmittelbar eine Änderung des
zeitlichen Verlaufs der Anisotropie zur Folge. Ein Wechsel von der Delta-Injektion
zu jener, wie sie durch das Reid-Axford-Profil (4.15) vorgegeben wird, würde den
Anteil an Partikeln mit µ > 0 über einen längeren Zeitraum höher halten. Das
Anisotropie-Profil würde langsamer gegen Null streben.
Sinnvoll hingegen ist eine Verringerung der mittleren freien Weglänge λr . Dies
würde im Roelof’schen Transport bedeuten, daß zwar weniger Teilchen den Beobachtungsort später erreichen - diese aber dafür tendenziell den Beoachtungsort nicht
so schnell verlassen. Die Folge ist, daß das Intensitätsprofil später auf der Zeitachse
beginnt und daß das Profil (ohne Querdiffusion) in der abfallenden Phase flacher
verläuft.
Da die mittlere, freie Weglänge λr = cos2 (Ψ)λ|| über (2.25) mit dem PWDK verknüpft ist - und dieser wiederum wegen (5.10) mit κ⊥ - wird zugleich der Transport
senkrecht zum Magnetfeld gemindert (man will damit ausdrücken, daß der Quertransport seine Ursache u.a. in der Pitchwinkelstreuung hat).
82
KAPITEL 6. VALIDIERUNG UND TESTS
Man kann daher vermuten, daß sich für eine geeignete Wahl von λr die teilchenabtragende Querdiffusion und das verlangsamte Passieren der Partikel am Detektor
gegenseitig derart kompensieren, daß die Steigung in der zweiten Phase des Intensitätsverlaufs jener des Roelof-Transports entspricht. In der Tat konnte für jedes
der Ereignisse eine hinreichend guter Wert für dieses Kriterium gefunden werden
(vgl. obereres und 2. Profil von unten in Abb. 6.4). Allerdings erreichen die ersten
Teilchen den Satelliten erst mit Verzögerung (im Minuten-Bereich). Der Effekt liegt
aber noch im Rahmen der Meßgenauigkeit, denn die Zeitauflösung der Teilchen liegt
in dieser Größenordnung. Zudem kann man aus elektromagnetischen Beobachtungen
nicht genau auf den Injektionszeitpunkt schließen. Im Hinblick auf die Verzgerung
ist der neue Fit daher nicht schlechter als der alte.
Hinzu kommt, daß die Verzögerung ohnehin um mehr als die Hälfte verkürzen und
in kleinen Radialabständen sogar fast gänzlich eliminieren kann, zumal mehr Teilchen injiziert werden müssen, um die Verluste durch Querdiffusion auszugleichen.
Das Mehr an Phasenraumdichte erhöht aufgrund des starken räumlichen Gradienten in der inneren Heliosphäre den Diffusionsfluß. Dadurch wird der SEP-Strom am
Beobachtungsort geringfügig schneller. Dies macht ggfs. Nachkorrekturen von λ||
notwendig. Das Resultat ist dann letztlich an der oberen, feinpunktierten Kurve in
Abb. 6.4 zu erkennen.
Schwierigkeiten ergeben sich bei der Rekonstruktion des ansteigenden Profils und
des Maximums im Intensitätsprofil: Die anfangs eng umrissenen, räumlichen Strukturen der Ausbreitungsfront (erkennbar am ”scharfen” Maximum im Intensitätsprofil) sind, sobald sie den Detektor erreichen, durch die 2D-Diffusion bereits deutlich
”glatter” geworden. Das Profil der Querdiffusion kann in diesem Bereich dem real gemessenen nicht mehr folgen. Dieses Verhalten hat sich in radialen Distanzen
von 0.5 AU und darüber hinaus gezeigt (so auch in dem hier illustrierten Beispiel).
Alle Fits bzgl. dieses Raumabschnitts sind aber ohnehin nicht repräsentativ genug,
da dort die Geometrie des IMF bereits nicht mehr einem Radialfeld gleicht (siehe
Abb. 2.1) und sich für langsame Partikel Sonnenwindeffekte bemerkbar machen sollten. Gleiches zeigt sich aber auch bei jenen solaren Partikeln, die aufgrund starker
Streuprozesse in kleinen Abständen erfasst werden. Der Unterschied ist jedoch geringer. Hinzu kommt, daß im Rahmen dieser Arbeit kein Ereignis mit r < 0.5 AU
identifiziert werden konnte, das mit großen Weglängen gefittet werden konnte.
Die Ergebnisse aller Fits sind in Tab. 6.3 zusammengestellt.
6.3. FITS AN INTENSITÄTS- UND ANISOTROPIEVERLÄUFE
Ereignis
28.03.76(2)
02.03.80(2)
06.08.80(2)
10.06.81(1)
18.06.81(2)
19.11.81(2)
02.06.82(1)
EnergieKanal
13-27 MeV
Protonen
4-13 MeV
Protonen
13-27 MeV
Protonen
0.3-0.9
MeV
Elektronen
4-13 MeV
Protonen
0.3-0.9
MeV
Elektronen
0.3-0.9
MeV
Elektronen
83
λr /[AU]
r/[AU]
vSW /[km/s]
Inj.
θ/[ ◦ ]
0.055 (0.35)
0.5
400
δ
60
0.1 (0.35)
0.94
400
δ
56
0.05 (0.2)
0.93
400
(0.1,1.0)
60∗
0.01 (0.05)
0.317
350
(0.1,0.5)
38
8E+07
(1.6E+07)
0.01 (0.03)
0.33
400
δ
31
7.4E+05
(4E+05)
0.03 (0.1)
0.64
400
δ
10
1.2E+08
(1.5E+07)
0.02 (0.05)
0.579
350
δ
9
1.25E+08
(1.5E+07)
Tabelle 6.1: Parametersätze der gefitteten Intensitäts- und Anisotropieprofile. In
Klammern der Spalten von λr und m0 (Injektionsmenge) stehen die
über das FD-Schema der Roelofschen Transportgleichung ermittelten
Parameter. (1) Quelle: siehe [18]; (2) Quelle siehe [17]; ∗ geschätzt; θ
heliografische Breite
Läßt man vorerst die Folgen außer acht, die sich durch die Modellierung in radialer
Geometrie ergeben, so ist zu erkennen, daß die gefittete, mittlere freie Weglänge im
Schnitt um den Faktor 4 kleiner ist, als jene λr , die über den Roelof-Transport allein
ermittelt wurden. Insofern könnte das 2-D-Modell helfen, das bekannte DiskrepanzProblem (vgl. Kap. 5.1) zu entschärfen oder gar zu lösen.
Auch kann die bisherige Annahme, wonach die SEPs in impulsiver Weise und
an eng umgrenzten Orten durch solare Flares und/ oder koronale Massenausstöße
die Korona verlassen, nicht widerlegt werden. Denn obwohl die Möglichkeit besteht,
die Emission von SEPs großflächig zu simulieren, war dies zumindest in den sieben
untersuchten Ereignissen nicht notwendig, um die Intensitäts- und Anisotropieprofile
in hinreichender Weise zu rekonstruieren.
Neben λr wurde lediglich noch die Injektionsmenge erhöht - dies allerdings beträchtlich - , um die Verluste über den Quertransport zu kompensieren. Durchschnittlich wurden Teilchenmengen injiziert, die um 2 Größenordnungen über den
urspünglichen liegen. Tendenziell mußte mehr bzw. weniger Masse investiert werden
- je nach dem, wie stark bzw. schwach die Diffusionswirkung insgesamt ist. Jenseits
von 0.5 AU kann der Multiplikator im Bereich 104 liegen. Dies kann Ursache der
m0
1.7E+07
(3E+06)
5E+09
(1E+06)
1.4E+09
(2.4E+08)
84
KAPITEL 6. VALIDIERUNG UND TESTS
vereinfachten Geometrie sein und soll an dieser Stelle nicht zur Diskussion stehen.
Die Wahl von m0 gilt aber ohnehin als freier Parameter, da es nur die lokalen Messungen der Teilchenflüsse, aber kein Maß für die Zahl der injizierten Teilchen gibt.
Welche Dynamik die Phasenraumdichte in der Ebene der Ekliptik auslöst, -insbesondere
bei erhöhten Injektionsmengen - wurde abschließend noch untersucht.
Abbildung 6.5: Intensitätsverteilung des streustarken Ereignisses vom 2. März 1980
nach ca. 3 Stunden (linkes Bild) und nach ca. 6 Stunden. Die
Führungsfeldlinie befindet sich senkrecht und mittig im jeweiligen
Bild. Die Sonne liegt in (0,0); λr = 0.1, δ-Injektion
Hierzu seien beispielhaft zwei Momentaufnahmen der Ebene der Sonnenekliptik
für das Ereignis vom 02. März 1980 dargestellt (siehe Abb. 6.5). Die eingangs in
Kap. 5.3.2 ”befürchtete” Diffusion auf die sonnenabgewandte Seite und damit verbundene Randeffekte blieben bei der Modellierung des streustärksten Ereignisses
dieser Testreihe aus, so daß die Art der Randbedingung zumindest für die hier untersuchten Fälle nicht von Bedeutung ist. Für die streuärmsten Events hätte es
im Nachhinein auch gereicht, einen wesentlich kleineren Winkelbereich abzudecken.
Diesen Vorteil hätte man dann in eine kleinere Schrittweite dz umsetzen können.
Die Fokussierung sorgt in jeder Simulation dafür, daß die Teilchen in einem schmalen Kegel nach außen getragen werden. Je stärker die Pitchwinkeldiffusion, desto
breiter bildet sich das Gebilde aus (vgl. mit Abb. 6.6). Die Partikel belegen hier
einen Winkelausschnitt, der nicht größer als 180◦ ist.
Gleichzeitig ist auch zu beoachten, daß der Schwerpunkt infolge der Fokussierung
nach außen wandert.
Würde man noch weiter in der Zeit voranschreiten, wo die Geometrie den Transport im Grunde unrealistisch erscheinen läßt, würde der Kegel entlang der Führungs-
6.3. FITS AN INTENSITÄTS- UND ANISOTROPIEVERLÄUFE
85
feldlinie zunehmend gestaucht und nähme die Form ähnlich einer Muschel an. Schließlich sähe das Gebilde wie ein breit geschwungener Bogen aus, der mit der Zeit immer mehr ausdünnt. Die Ausbreitungsfront weist dabei in der Draufsicht stets eine
stärkere Krümmung auf als die imaginären Kreisbahnen, auf denen der Quertransport stattfindet.
Abbildung 6.6: Intensitätsverteilung des streuarmen Ereignisses vom 2. Juni 1982
nach ca. 3 Stunden (linkes Bild) und nach ca. 6 Stunden. Bzgl. Geometrie gilt das gleiche wie in Abb. 6.5; λr = 0.02, δ-Injektion
86
KAPITEL 6. VALIDIERUNG UND TESTS
7 Schlußfolgerungen und Ausblick
Die im Rahmen dieser Arbeit eingeführte Querdiffusion wirkt unterstützend bei der
Überwindung des magnitude-Problems - jene Diskrepanz der Weglängen, die sich
aus den Fits der Transportgleichungen und aus der Quasilinearen Theorie ergeben.
Das implementierte Verfahren bietet hierzu bereits einen guten Ansatzpunkt, kann
es doch zumindest innerhalb von 0.5 AU die Intensitäts- und Anisotropieprofile bereits recht gut wiedergeben. Insbesondere die abklingende Phase nach Passieren der
Ausbreitungsfront konnte immer nachgebildet werden, so daß die Fits letztendlich
einen durchschnittlich um den Faktor vier kleineren Wert für λr gegenüber denen
des Roelofschen Transports ergeben.
Eine anders definierte Abhängigkeit des Querdiffusionskoeffizienten innerhalb von
1 AU könnte helfen, das in Kap. 6.3 erwähnte ”Auseinander-Diffundieren” fest umrissener Fronten hinauszuzögern. Alternativ könnte man auch ein räumlich ausgedehntes Injektionsprofil wählen. Es würde voraussichtlich durch den verminderten
Phasenraumdichte-Gradienten quer zum Magnetfeld zu weniger Verlusten auf der
Führungsfeldlinie führen.
Verfeinerungen in der Schrittweite oder einen andere Zahlenrepräsentation könnten zudem in numerischer Hinsicht noch einige Verbesserungen bieten. Die Dynamik
an sich würde sich jedoch nicht ändern - es sei denn, das Stabilitätskriterium des
Crank-Nicolson-Verfahrens wäre verletzt.
Was noch fehlt, - und darauf wurde das erweiterte Programm gref bewußt ausgelegt - ist eine geometrische Anpassung für größere Distanzen zur Sonne, damit das
interplanetare Magnetfeld in angemessener Weise dargestellt ist.
Der 2-D-Transport kann als ein Modellierwerkzeug herhalten, um die Dynamik in
der Ebene der Sonnenekliptik besser zu verstehen und nachzubilden. Aufgrund einer
Vielzahl von unterschiedlichen Gründen hat man bis dato den Transport senkrecht
zum Magnetfeld vernachlässigt und somit keine genauen Erkenntnisse über ihn.
Spätestens seit der Veröffentlichung eines wissenschaftlichen Artikels von Cane u.
Erickson im Jahr 2002 gibt es erste deutliche Hinweise auf einen Quertransport.
Als Grundlage dienten bei ihren Untersuchungen die Meßwerte von RadiowellenEmissionen innerhalb eines Abstandes von einem AU zur Sonne, die indirekt auf
SEPs schließen lassen. SEPs werden u.a. bei impulsiven Flares in das interplanetare
Medium freigesetzt. Schnelle Elektronen, die einen Teil dieser SEPs bilden, erzeugen
im Plasma die für die Radiowellen-Emissionen ursächlichen Langmuir-Oszillationen
([19], S.99,182), deren Frequenz von der lokalen Plasmadichte abhängen. Mit wachsendem Abstand zur Sonne erfahren die durch Partikel hervorgerufenen Emissionen
einen fallenden Drift in dieser Frequenz. Es wurde an verschiedenen Orten jenseits
der Feldlinie, an deren Fußpunkt ein Flare aufgetreten ist, die Zeit ermittelt, die die
87
88
KAPITEL 7. SCHLUSSFOLGERUNGEN UND AUSBLICK
Partikel einer bestimmten Frequenz brauchen, um von der Quelle zum Beoachter
zu gelangen. Man hat durch den Einsatz mehrerer Satelliten Verzögerungen festgestellt, die mit einem zunehmenden Abstand von der ”Injektionsfeldlinie” anwachsen.
Dies deutet darauf hin, daß einige Partikel die ursprüngliche Bezugslinie, auf der die
SEPs sich anfangs bewegten, zur Seite abgedriftet sind und eine andere Feldlinie
gewählt haben, so daß sie insgesamt länger unterwegs waren. In dem Artikel heißt
es, daß der Abweichwinkel zwischen dem Längengrad des Flares und dem Fußpunkt
der Feldlinie, auf der sich der Satellit befindet und in dem noch Partikel der o.g.
genannten Art gemessen werden, bis zu 120◦ betragen kann.
Sollten sich die Vermutungen verfestigen und es liegen entsprechend mehr dieser
Meßdaten vor, könnte dieses Modell helfen, noch bessere Fits zu erzielen. Die gefitteten Intensitäten eines Ereignisses entlang verschiedener Feldlinien lassen sich nun
mit den Beobachtungen von 2 oder mehr Raumfahrzeugen vergleichen. Dies würde
helfen, die Dynamik des Quertransports zu verstehen - und es könnte jene Parameter
identifizieren, die für diesen wesentlich sind.
89
90
ANHANG A. ANHANG
A Anhang
A.1 Physikalische Größen und Symbolverzeichnis
Symbol Dimension
Beschreibung
α
rad
AU
c
149.6E+09 m
3 · 108 m/s
cl+1/2
CFL
0
1
µ 0 c2
(n)
l
FD
IMF
λ||
µ
µ0
AU
cos α
4π10−7 N A−2
ν
∈ [0, 1]
ω
PDE
0.0103 rad/h
Ψ
rad bzw.
◦
PWDK
q
SEP
σ
Ω−1 m−1
θ
∈ [0, 1] bzw.
vSW
400 − 800 km/s
◦
Neigungswinkel der Bahn eines geladenen Teilchens zum magnetischen Feld
Astronomische Einheit (Abstand Sonne-Erde)
Lichtgeschwindigkeit
approximierter Diffusionskoeffizient bei Position
zl+1/2
Courant-Friedrich-Levi
elektrische Feldkonstante
Konsistenzfehler eines Differenzenschemas bzgl.
des Punkts (tn , xl )
Kürzel für Finite Differenzen
interplanetares Magnetfeld
mittlere freie Weglänge entlang einer Feldinie
Pitchkosinus
magnetische Feldkonstante
Reflexionskoeffizient an den Grenzen des zIntervalls (vgl. Kap. 5.3.2)
Winkelgeschwindigkeit der Sonne
Partielle Differentialgleichung (engl. Kürzel)
Winkel zwischen radialer Richtung und Magnetfeldrichtung der archimedischen Spirale
Pitchwinkeldiffusionskoeffizient
Spektralindex des Energiedichtespektrums magn.
Fluktuationen
Kürzel für solare energiereiche Teilchen, deren Modellierung Gegenstand dieser Arbeit ist
Leitfähigkeit (Kehrwert des spezifischen Widerstands) oder Polarität im Pitchwinkeldiffusionskoeffizienten
Gewichtung im Diffusions-Differenzenschema
(5.18) bzw. heliographische Breite der Sonne
Sonnenwindgeschwindigkeit
A.2. PROGRAMMIERTECHNISCHE HINWEISE
91
A.2 Programmiertechnische Hinweise
A.2.1 Portierung von f77- auf f95-Standard
Die Quelldateien zur Querdiffusion wurden im f95 -Standard verfasst. Die Modernisierung der übrigen Bestandteile ist nicht zwingend notwendig, um auch
weiterhin ein lauffähiges Programm zu erhalten, denn auch moderne Compiler unterstützen das feste Eingabeformat und die f77-Konstrukte (bis auf wenige Ausnahmen). Dennoch wurde so verfahren und das neue Programm parallel zum alten in
umgeschriebener Form verfasst. Anschließend wurden die separaten, neu entwickelten f95 -Quelldateien zur Querdiffusion beiden Versionen ”angehängt”.
Die Portierung vom ”alten” in den neuen Standard wurde in einem ersten Schritt
mit dem Hilfsprogramm to f90.f90 von Alan J. Miller vollzogen [22].
Hierbei geschieht im Ganzen Folgendes:
• Bei do-Schleifen wird die Programmablaufsteuerung über Anweisungsnummern ersetzt durch do ... end do und durch die Sprachelemente cycle und
exit ergänzt. Letzteres geschieht allerdings nur unregelmäßig.
• Arithmetische if -Anweisungen werden durch das if ... then ... else ... end if Konstrukt ersetzt.
• Datentypenvereinbarungen werden dem Fortran 90 Stil entsprechend vorgenommen - soll heißen, daß zwischen dem Datentyp und seinem Bezeichner ein
zweifacher Doppelpunkt steht. Bei Unterprogrammen wird die Datentypdeklaration der formalen Parameter mit dem zugehörigen intent - Attribut ergänzt.
Dieses legt fest,welcher der Parameter Eingabe- oder Ausgabefunktion (oder
beides) hat.
• Zusammengehörige Anweisungsblöcke werden eingerückt.
• Kommentarzeichen C”wird durch !” ersetzt.
”
”
Der Konverter arbeitet leider nicht immer perfekt und hat zudem den Nachteil,
daß er den Quellcode bevorzugt am Rand der Datei plaziert, was die ursprüngliche
Leserlichkeit im ”fixed format” zunichte macht. Hier war einige Handarbeit nötig
- ebenso bei den Datentypdeklarationen, die teilweise unvollständig reproduziert
wurden. Ob das produzierte Format normgerecht war, ließ sich leicht mit einem
entsprechenden Fortran 95 Übersetzer (siehe Kapitel A.2.2) durch Setzen der Optionszeichen
hCompileri -std=f95 -ffree-form hDateii.f95
prüfen.
Des weiteren wurde manuell die Parameterliste der Routine open zur Erzeugung
von Datenströmen geändert, derart daß . . .
92
ANHANG A. ANHANG
• . . . im f77 Quelltext die Klausel READONLY weggelassen . . .
• . . . und im f95 Quelltext die Klausel READONLY durch action = ’read’
ersetzt wurde.
Schließlich wurden alle nicht initialisierten Variablen mit einem entsprechenden
Wert versehen (z.B. ERRFLAG = .FALSE. in gref.for(.f95) und backg = 0.0 in
intensi.for(.f95)).
Die algorithmische Korrektheit wurde bestätigt, indem die Simulationsergebnisse des F77-Programms denen des F95-Programms gegenübergestellt und verifiziert
wurden (bei identischen Simulationsparametern).
A.2.2 Compilerwahl
Da das GREF-Programm auf Rechnern mit dem Betriebssystems Microsoft Windows XP (32 Bit) bzw. -Professional x64 weiterentwickelt und zudem der Sourcecode
teilweise oder vollständig in FORTRAN 95- Standard überführt wurde, stellte sich
die Frage nach einem angemessenen (kostenfreien) Compiler.
Das ursprüngliche, in “fixed-format geschriebene Programm ohne zusätzliche Querdiffusion ließ sich mit dem GNU Fortran Compiler g77 (Version 3.4.4.,2004) in Verbindung mit mit dem Gnu f77 -Übersetzer des Linux-Emulators Cygwin übersetzen.
Allerdings erreicht das GREF-Programm in der Subroutine lefit nicht die erforderliche Genauigkeit, wenn es darum geht, die Legendre-Koeffizienten der Pitchwinkelverteilung durch Singulärwertzerlegung anzupassen. Das gleiche Bild zeigte sich
bei der Verwendung von gfortran [10] und g95 [11], sofern keine weiteren Optionen aktiviert wurden. Die Ursache liegt darin, daß zu einem nicht näher spezifizierten Zeitpunkt ein Überlauf einer oder mehrerer Gleitkommazahlen in single
precision geschieht oder nicht genügend Nachkommastellen für sehr kleine Werte
zur Verfügung stehen. Offensichtlich ist die Interpretation der Dateitypdeklaration
stark compiler(-versions-)abhängig. Man behebt dieses Problem bei den zwei zuletzt genannten Interpretern, indem man das Optionszeichen -r8 setzt. Dies erklärt
alle Gleitkommazahlen des Datentyps real gemäß des IEEE-Standards als doppelt
genau (double precision, 16 Nachkommastellen können dargestellt werden, [24]).
Leider konnten innerhalb der Bearbeitungsfrist die konkret ursächlichen Variablen
nicht ausgemacht werden, so daß durchaus unnötig Speicherplatz aufgewendet wird.
Als beste Wahl und ohne Optionsangabe ist die ältere Version des f77/g77 3.4.2,
der im Emulator MinGW [23] läuft, zu empfehlen.
Das gref -Programm in f95 -Syntax und freiem Textformat (mit oder ohne Querdiffusion) kann problemlos mit gfortran und g95 übersetzt und anschließend ausgeführt
werden. Hierbei muß der Wertebereich und die Genauigkeit der Gleitkommazahlen
nachträglich nicht erhöht werden.
A.2. PROGRAMMIERTECHNISCHE HINWEISE
93
Der Wechsel zum f95 -Standard (und -Compiler) bei der Implementation der Querdiffusion kompensiert folgende Einschränkungen sowohl in der Optionsauswahl des
f77 als auch in den Sprachelementen und -konstrukten:
• Weniger Optionsmöglichkeiten in der Verwaltung von Ein- und Ausgabeströmen
(open()-Statements). Keine exklusiven Schreib- oder Leserechte.
• Das ”fixed-format” zwingt den Quellcode in dafür vorgesehene Spalten (”LochkartenPrinzip”) und erlaubt zudem keine überlangen Bezeichner für Variablen und
Prozeduren. Das Leerzeichen wird hierbei ignoriert.
• Die numerische Repräsentation einer Zahl durch single precision (Datentyp
real ) und double precision (Datentyp double precision) ist compiler- und betriebssystemabhängig. Letzterer Datentyp ist zudem nicht erweiterbar.
• Datenverarbeitung mit Arrays kompliziert. Elemente können nur über Indizes
erreicht und geändert werden. Hier können sich Fehler einschleichen, z.B. über
die Indizierung jenseits der Arraygrenzen.
• Programm-Struktur nicht auf Erweiterbarkeit angelegt.
Demgegenüber bieten der modernere Standard und seine Kompilierwerkzeuge folgende Features:
• Exklusive Lese- und Schreibrechte in der Datenstromverarbeitung möglich
• Vorteile des freien Textformats: Zeilen dürfen bis zu 132 Zeichen lang sein und
an beliebiger Stelle (Spalte) beginnen.
• Die numerische Darstellung (Zahlenbereich und Genauigkeit) eines Datentyps
läßt sich nun eindeutig compiler- und platformunabhängig über die Funktion selected real kind(.,.) bzw. selected int kind festlegen. Die Rückgabewerte
werden dem Datentypattribut kind zugewiesen.
Der Compiler erlaubt nachträglich eine Erhöhung des Wertebereichs durch
entsprechende Optionen (-i4, -i8, r8, -d8 ).
• Wer mit Fortran 77 vertrauter ist, kann im Zweifelsfall bei alter” Syntax
”
bleiben, ohne dabei Einschränkungen in der Funktionsauswahl des Compilers
einbüßen zu müssen, da F77 nahezu vollständig eine Untermenge des F95
Standards ist. Zudem kann man Quelldateien unterschiedlichen Formats und
Standards mit demselben Compiler (getrennt) übersetzen und anschließend
durch Verlinken der entstandenen Objektdateien ein ausführbares Programm
erzeugen.
• Das Modul-Konzept erlaubt die Definition von globalen Variablen, was lange
Parameterlisten in den Subroutinen vermeidet. Zudem lassen sich Prozeduren
94
ANHANG A. ANHANG
”verwandten” Typs in einem Modul bündeln. So braucht man externe Prozeduren nicht einzeln übersetzen. Module wiederum sind um weitere Module
erweiterbar, was zusammen mit der Definition eigener, komplexerer Datentypen dem Aspekt der Objektorientierung nahe kommt
Die Wahl fiel letztlich auf den g95 -Compiler, weil er gegenüber gf ortran eine
größere Optionsauswahl enthält und im Fehlerfall konkretere Angaben über die
Ursache(n) angibt (z.B. Erwähnung des Arrays, in dem über die Grenzen hinaus
indiziert wurde - mit Positionsangabe).
A.2.3 Installation
Im Folgenden werden nun die einzelnen Schritte der Installation und Ausführung
der Programme unter Windows beschrieben. Zuvor ist die Installation der LinuxUmgebung cygwin notwendig. Hierzu muß die Datei setup.exe unter www.cygwin.
com heruntergeladen werden. Bei Ausführung öffnet sich ein Fenster, in dem die
Setup-Einstellung und die anschließende Installation vorgenommen werden. Im onlineModus lassen sich notwendige Pakete herunterladen. Hier reichen die StandardPakete zuzüglich jener Dateien für das make- Kommando, das noch für die Dateiverwaltung und die kontrollierte Übersetzung des Programms nötig ist, völlig aus.
Des weiteren wird der g95 -Compiler benötigt. Dazu muß die entsprechende Datei
unter dem in [11] vermerkten Link heruntergeladen und an beliebiger Stelle im Verzeichnis entpackt werden. Um alle Programme von jedem Ort aus erreichbar zu
machen, müssen die Pfade dorthin unter Systemsteuerung-¿System-¿Erweitert der
globalen PATH -Variablen hinzugefügt werden.
Der Übersetzungslauf wird durch Öffnen des Eingabefensters der Cygwin-Umgebung
(die bash shell ), den Wechsel in das Verzeichnis mit den Quelldateien des Programms
gref bzw. para und das anschließende Eintippen von
make
in die Kommandozeile gestartet. Die erforderlichen Objektdateien werden auf dieser
Weise automatisch erzeugt und zur ausführbaren Datei gref.exe verlinkt.
Das Programm wird mit
./gref
gestartet. Alle Erzeugnisse der Übersetzung sowie die Ausgabedateien des Programms können mit
make clean
wieder gelöscht werden.
Sofern man an der Manipulation der Konfigurationsdatei über para interessiert
ist, kann man das Programm über
make para
erzeugen und mit ./para ausführen.
A.2. PROGRAMMIERTECHNISCHE HINWEISE
95
A.2.4 Protokollierte Änderungen am Quellcode des Programms
gref
Vorweg sei gesagt, daß der Code zur Querdiffusion sich fast ausschließlich im Modul perpdif f befindet und dessen Kommentierung sowohl in Kap. 5.4 als auch im
Quellcode selbst geschieht.
Damit die Integration in gref funktioniert, muß das Modul perpdif f in jene
(Unter-)Programmen eingebunden werden, wo es gebraucht wird. Dies ist in den
Subroutinen ginout und gcalc sowie dem Hauptprogramm gref der Fall, bei denen
noch vor dem jeweiligen Deklarationsteil die global verwendeten Variablen des Querdiffusiontransports und die benötigten Subroutinen-Namen aus perpdif f durch die
use-Klausel eingebunden werden müssen.
ginout.f95
• Einbinden der globalen Variablen und der Initialisierungs-Routine init vor dem
Deklarationsteil
• Auslesen der Parameter des Querdiffusions-Transports nach Öffnen der Konfigurationsdatei ab Zeile 244.
• Aufruf von init, nachdem die s-Abhängigkeit des Pitchwinkel-Diffusions-Koeffizienten
bestimmt worden ist (Zeile 908).
• Einfügen einer Subroutine, die als Zufallsgenerator Zahl aus [0,1] bestimmt
(Quelle: [26],S. 1142). Nicht jeder Compiler stellt einen Zufallsgenerator zur
Verfügung oder stellt diesen unter einem anderen Namen bereit. Um sich davon
unabhängig zu machen, wurde so verfahren (ab Z. 1316).
gcalc.f95
• Einbinden der globalen Variablen, der Initialisierungs-Routine init2 sowie der
Subroutine für die Differenzenschemata vor dem Deklarationsteil (Z.101)
• Aufruf von init2 Zeile. 288
• 1. Aufruf von nextRoelofSStep(k, itcount, ls) in Zeile 717 (vgl. Kap. 5.4)
• 1. Aufruf von nextRoelofMuStepkL(k, ls) in Zeile 772 (vgl. Kap. 5.4)
• 1. Aufruf von nextRoelofZStepL(k,ls,u) in Zeile 776 (vgl. Kap. 5.4)
• 2. Aufruf von nextRoelofZStepL(k,ls,u) in Zeile 783 (vgl. Kap. 5.4)
96
ANHANG A. ANHANG
• 2. Aufruf von nextRoelofMuStepL(k, ls) in Zeile 822 (vgl. Kap. 5.4)
• 2. Aufruf von nextRoelofSStep(k, time, ls) in Zeile 1020 (vgl. Kap. 5.4)
• Ausgabeort bzgl. zwei Dimensionen definiert(ab Z.1039)
• Aufruf von plot2d(u, sskp, zskp, timestamp, ns) noch innerhalb der Rechenschleife (in Zeile 1139, vgl. Kap. 5.4)
• Aufruf von sprofile(u) (Z. 1163)
B Abbildungsverzeichnis
Abbildung B.1: Teilchenereignis 28.03.76: Vergleich der Intensitäts- und Anistropieverläufe mit und ohne Querdiffusion (Injektion über Reid-AxfordProfil mit (tD , tL ) = (0.1,1.0))
97
98
ANHANG B. ABBILDUNGSVERZEICHNIS
Abbildung B.2: Teilchenereignis 06.08.80: Vergleich der Intensitäts- und Anistropieverläufe mit und ohne Querdiffusion (Injektion über Reid-AxfordProfil mit (tD , tL ) = (0.1,1.0))
99
Abbildung B.3: Teilchenereignis 10.06.81: Vergleich der Intensitäts- und Anistropieverläufe mit und ohne Querdiffusion (Injektion über Reid-AxfordProfil mit (tD , tL ) = (0.1,0.5))
Abbildung B.4: Teilchenereignis 18.06.81: Vergleich der Intensitäts- und Anistropieverläufe mit und ohne Querdiffusion (mit δ-Injektion)
100
ANHANG B. ABBILDUNGSVERZEICHNIS
Abbildung B.5: Teilchenereignis 19.11.81: Vergleich der Intensitäts- und Anistropieverläufe mit und ohne Querdiffusion (mit δ-Injektion)
Abbildung B.6: Teilchenereignis 02.06.82: Vergleich der Intensitäts- und Anistropieverläufe mit und ohne Querdiffusion (mit δ-Injektion)
Literaturverzeichnis
[1] Bieber, John W. ; Matthaeus, William H. ; Smith, Charles W. ; Wanner, Wolfgang ; Kallenrode, M.-B. ; Wibberenz, Gerd: Proton and Electron Free Mean Paths: The Palmer Consensus Revisited. In: Astrophys. J. 420
(1994), Januar, S. 303
[2] Brauer, Klaus: Lösungsmethoden bei partiellen Differentialgleichungen. In:
Vorlesungsskript Partielle Differentialgleichungen (2005), Juni
[3] Cane, H. V. ; Erickson, W. C.: Energetic particle propagation in the inner
heliosphere as deduced from low-frequency (<100 kHz) observations of type III
radio bursts. In: Journal of geophysical research 108 (2003), Mai
[4] Chattot, J.-J.: Computational Aerodynamics and Fluid Dynamics. Springer
Verlag, 2002. – ISBN 3–540–43494–1
[5] Dröge, Wolfgang: Transport of Solar Energetic Particles. In: Ap.J. (Suppl.)
(1993), Februar, S. 6
[6] Elsner, Frank: Einführung in die FORTRAN-Programmierung. In: Skript
zum Fortran77-Programmier-Kurs (1997), Januar
[7] Farlow, Stanley J.: Partial Differential Equations for Scientists and Engeneers. Dover Publications, Inc, New York.,, 1993. – ISBN 0–486–67620–X
[8] Fisk, L.A. ; Axford, W.I.: Anisotropies of solar cosmic Rays. In: Solar Physics
7 (1968), November, S. 487–498
[9] Forbush, S.E.: Three unusual cosmic ray increases possibly due to charged
particles from the Sun. In: Phys. Rev. 70 (1946), S. 771
[10] GNU Fortran 95 Projekt: Offizielle Homepage des GNU Fortran 95 Projekt gfortran. http://gcc.gnu.org/fortran/, Abruf: 30.06.2006. – Dokumentationen unter http://gcc.gnu.org/wiki/GFortran
[11] GNU Fortran 95 Projekt: Offizielle Homepage des GNU Fortran 95 Projekt gfortran. http://www.mirror5.com/software/gcc/. Version: November
2003, Abruf: 27.06.2006. – Download des Quellcodes
[12] Großmann, Ch. ; Roos, H.-G.: Numerik partieller Differentialgleichungen.
B. G. Teubner Stuttgart, 1994. – ISBN 3–519–12089–5
101
102
Literaturverzeichnis
[13] Hasselmann, K. ; Wibberenz, G.: Scattering of charged particles by random
electromagnetic fields. 34 (1968), S. 353
[14] Hatzky, R. ; Kallenrode, M.-B.: Numerics of interplanetary transport. In:
Proc. 26th ICRC 6 (1999)
[15] Hatzky, Roman: Winkelverteilungen energiereicher geladener Teilchen und die
Streueigenschaften des interplanetaren Mediums, Diss., Oktober 1996. http:
//ifkki.kernphysik.uni-kiel.de, Abruf: 26.05.2006
[16] Hatzky, Roman ; Kallenrode, M.-B. ; Schmidt, J.: The effect of adiabatic
deceleration on angular distributions of solar energetic particles. In: Proc. 25th
ICRC 1 (1997), Oktober, S. 245
[17] Kallenrode, M.-B.: Particle propagation in the inner heliosphere. In: J.
Geophys. Res. 98 (1993)
[18] Kallenrode, M.-B. ; Wibberenz, G. ; Hucke, S.: Propagation conditions
for relativistic electrons in the inner heliosphere. In: Astrophys. J. 394 (1992),
S. 351
[19] Kallenrode, May-Britt: Space Physics. 3. Springer-Verlag Berlin Heidelberg
New York, 2004. – ISBN 3–540–20617–3
[20] Kallenrode, May-Britt: Modeling Transport. (2006), Januar. – Skript zur
gleichnamigen Vorlesung
[21] Meyer, P. ; Parker, E.N. ; Simpson, J.A.: Solar cosmic rays of February
1956 and their propagation through interplanetary space. In: Phys. Rev. 104
(1956), S. 768
[22] Miller, Alan J.: to f90: Konvertierungstool von FORTRAN 77 nach FORTRAN 90. http://www.rz.uni-bayreuth.de/lehre//fortran/vorlesung/
V01/V01.html. Version: 1983, Abruf: 30.06.2006. – Quellcodes unter http:
//www.rz.uni-bayreuth.de/lehre//fortran/vorlesung/V12/to_f90.f90
[23] Minimalist Gnu for Windows: Offizielle Homepage des MinGW-Projektes.
http://www.mingw.org. Version: 2004, Abruf: 30.06.2006. – Version 5.0.2,
Download unter http://prdownloads.sf.net/mingw/MinGW-3.1.0-1.exe?
download
[24] N.N.: A Proposed Radix- and Word-length-independent Standard for FloatingPoint Arithmetic. In: ACM SIGNUM Newsletter 29 (1985), S. 37–51
[25] Press, William H. ; Flannery, Brian P. ; Teukolsky, Saul A. ; Vetterling, William T.: Numerical Recipes in FORTRAN 77 - The Art of Scientific
Computing. Cambridge University Press, 1986-92. – 352–355 S. – ISBN 0–521–
43064–X
[26] Press, William H. ; Flannery, Brian P. ; Teukolsky, Saul A. ; Vetterling, William T.: Numerical Recipes in FORTRAN 90 - The Art of PARALLEL Scientific Computing. Cambridge University Press, 1986-96. – 352–355 S.
– ISBN 0–521–57439–0
[27] Richtmyer, R. D. ; Morton, K. W.: Difference Methods for Initial Value
Problems. Wiley-Interscience, 1967
[28] Roelof, E.C.: Propagation of solar cosmic rays in the interplanetary magnetic
field, in Lectures in high energy astrophysics. In: NASA SP-a99 (1969), S. 111–
135
[29] Ruffolo, D.: Effect of adiabatic deceleration on the focused transport of solar
cosmic rays. In: Astrophys. J. 442 (1995), S. 861
[30] Samarskij, A.A.: The Theory of Difference Schemes. Marcel Dekker, Inc.,
2001. – ISBN 0–8247–0468–1
[31] Schwarz, H.R.: Numerische Mathematik. B.G. Teubner Stuttgart, 1997. –
11–26,47–51 S. – ISBN 3–519–32960–3
[32] Tipler, Paul A.: Physik. Spektrum Akademischer Verlag Heidelberg, Berlin,
Oxford, 2000. – 995–1002 S. – ISBN 3–86025–122–8
[33] Wolfram Research, Inc.: Mathematica. http://www.wolfram.com.
Version: 2004, Abruf: 23.07.2006. – Computer-Algebra-System, Version 4.0.0.0
Eidesstattliche Versicherung
Hiermit versichere ich, daß ich die vorliegende Arbeit selbstständig und nur unter
Verwendung der angegebenen Hilfsmittel und Quellen angefertig habe.
Osnabrück, den
(Florian Lampa)