II. Elliptische Probleme
Werbung

Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
II. Elliptische Probleme
II.1 Finite Differenzen: Grundidee
II.2 Konvergenzaussagen
II.3 Allgemeine Randbedingungen
II.4 Gekrümmte Ränder
Kapitel II (0)
1
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
L2-Konvergenztheorie
Wir betrachten die Poissongleichung mit reinen Dirichlet-Randwerten auf dem
Einheitsquadrat
−∆u = f in Ω = (0, 1)2,
u = Φ auf ∂Ω
mit einer äquidistanten Diskretisierung (5 Punkt-Stern).
Fehler ǫ := uh − u|Ωh für h → 0?
Wie verhält sich der
|ǫh|22
P Nh
2
• Welche Norm betrachten wir? In der euklidschen Norm
=
k=1 ǫh
summieren wir für h → 0 immer mehr Punktauswertungen auf. Wir benötigen
also eine passende Skalierung:
N
h
X
1
1
kǫhk22 =
|ǫh|2 =
ǫ2h
Nh
Nh
k=1
Satz: Falls die Lösung u ∈ C 4(Ω) erfüllt, gilt für den globalen Diskretisierungsfehler
ku(4)k∞ 2
2
kǫhk2 ≤
h =O h .
48
Kapitel II (FDMKonvergenz)
2
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
L∞-Konvergenztheorie
Wir betrachten die Poissongleichung mit reinen Dirichlet-Randwerten auf dem
Einheitsquadrat
−∆u = f in Ω = (0, 1)2,
u = Φ auf ∂Ω
mit einer äquidistanten Diskretisierung (5 Punkt-Stern). Wie verhält sich der
Fehler ǫ := uh − u|Ωh für h → 0 bzgl. der Maximumsnorm?
• L∞-Norm (Maximumsnorm) kǫhk∞ = maxk=1,...,N |ǫk | .
• ǫk bezeichnet den Fehler im Gitterpunkt k
Satz: Falls die Lösung u ∈ C 4(Ω) erfüllt, gilt für den globalen Diskretisierungsfehler
kǫhk∞
ku(4)k∞ 2
2
≤
Ch = O h ,
6
wobei C eine vom Gebiet Ω abhängige Konstante ist.
Kapitel II (FDMKonvergenz)
3
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Konvergenzordnung
• Gilt für den Diskretisierungsfehler ǫh in einer geeigneten Norm k·k der folgenden
Zusammenhang:
kǫhk = O (hp) , p ≥ 1,
so besitzt die Diskretisierung die Konvergenzordnung/Ordnung p.
• Der Fünf-Punkte-Stern besitzt also die Konvergenzordnung 2.
• Je höher die Konvergenzordnung einer Diskretisierung ist, desto schneller
nimmt der Diskretisierungsfehler für h → 0 ab.
• Diskretisierungssterne mit höherer Konvergenzordnung führen jedoch auch zu
Matrizen mit größerer Bandbreite, was bei der Approximation in Randnähe zu
Problemen führt.
Kapitel II (FDMKonvergenz)
4
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Das diskrete Maximumsprinzip
Sei ∆h die Diskretisierung des Laplace-Operators mit dem 5 Punkt-Stern auf einem
äquidistanten Gitter Ωh. Es gelte ∆huh = f > 0. Dann folgt
max uh = max uh.
Ωh
∂Ωh
Beweisskizze: Wähle einen beliebigen Punkt (xi, yj ) im Inneren des Gitters. Die
Eigenschaft ∆huh > 0 lautet für diesen Punkt
−4uh(xi, yj ) + uh(xi−1 , yj ) + uh(xi+1, yj ) + uh(xi, yj−1) + uh(xi, yj+1) > 0.
Dies bedeutet
1
(uh(xi−1 , yj ) + uh(xi+1, yj ) + uh(xi, yj−1) + uh(xi, yj+1))
4
≤ max{uh(xi−1 , yj ), uh(xi+1, yj ), uh(xi, yj−1), uh(xi, yj+1)}
uh(xi, yi) <
Am Punkt (xi, yj ) kann das Maximum also nicht angenommen werden. Es wird
an einem Randpunkt angenommen.
Kapitel II (DiskretesMaximumsprinzip)
5
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Zentrale Differenzen für −u′′(x) = f in 1D (1)
3-Punkt-Approximation, Ordnung 2, u(0) = u(1) = 0
2 −1
−1
2 −1
... ...
−1
...
2 −1
−1
2
u1
u2
..
un−2
un−1
f1
f2
..
= h2
fn−2
fn−1
Modifikation der rechten Seite, Ordnung 4
2
−1
−1
2
...
Kapitel II (einführung04)
−1
...
−1
...
2
−1
u1
u
2
..
.
−1 un−2
2
un−1
f0 + 10f1 + f2
f1 + 10f2 + f3
2
h
..
=
.
12
fn−3 + 10fn−2 + fn−1
fn−2 + 10fn−1 + fn
6
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Zentrale Differenzen für −u′′(x) = f in 1D (2)
5-Punkt-Approximation, Ordnung 4, u(0) = u(1) = 0
32
−16
1
1
12
−16
30
−16
..
.
0
−16
30
..
.
1
−16
..
.
1
−16
1
1
..
.
30
−16
0
..
.
−16
30
−16
2
u = h
1
−16
32
1
f1 + (f0 + f1 + f2 )
9
f2
..
.
..
.
..
.
fn−2
1
fn−1 + (fn−2 + fn−1 + fn )
9
Achtung: Modifikation der rechten Seite an den randnahen Punkten notwendig.
Dies geschieht über Taylorentwicklungen von u−1 + u3 um u1 beziehungsweise von
un+1 + un−3 um un−1.
Kapitel II (einführung05)
7
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
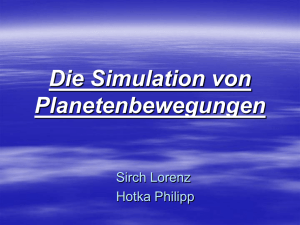
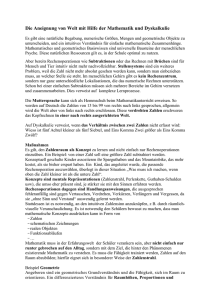
Fehlerordnung (1): −u′′(x) = 16π 2 cos(2πx) sin(2πx)
mit u(0) = u(1) = 0 und u(x) = sin(2πx) cos(2πx)
∞
diskrete L −Norm
Lösung
0.5
0.4
−2
10
0.3
−4
10
0.1
Fehler
Funktionswert u
0.2
0
−6
10
−0.1
−8
10
−0.2
−0.3
−10
10
−0.4
−0.5
0
0.2
0.4
0.6
Zeit x
Kapitel II (einführung08)
0.8
1
2
C*h
4
C*h
3 Punkt App
5 Punkt App
3 Punkt App mod.
1
10
2
10
Anzahl der inneren Knoten
3
10
8
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
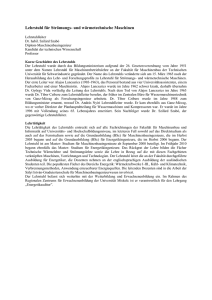
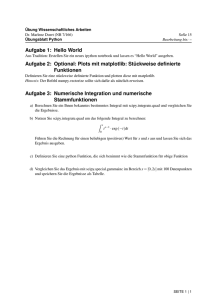
Fehlerordnung (2): −u′′(x) = f (x)
modifizierte 3-Punkte-Approximation
Konvergenz ist abhängig von der Glattheit der Lösung
1
2
f1 = x (3 − 7x), u1 =
4 52
− 5 x (1
∞
diskrete L −Norm
− x),
7
3
f2 = x 2 (5 − 9x), u2 = − 74 x 2 (1 − x),
−5
10
9
5
Fehler
f3 = x 2 (7 − 11x), u3 = − 94 x 2 (1 − x).
nur u3 ∈ C 4
Lösung u1
−10
Lösung u2
Lösung u3
0
0
0
−0.02
−0.02
−0.02
−0.04
−0.04
−0.04
−0.06
−0.06
−0.06
−0.08
−0.08
−0.08
−0.1
−0.1
0
0.2
0.4
0.6
0.8
1
0
Kapitel II (einführung11)
10
C*h2.5
C*h3.5
C*h4
f1
f2
f3
1
10
2
10
Anzahl der inneren Knoten
3
10
−0.1
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
9
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Neumann Randwerte mit finiten Differenzen
Einfachster Fall:
Äquidistantes Gitter über dem Einheitsquadrat: Der Rand
wird von unserm Gitter genau getroffen. Ähnlich wie den Laplace Operator,
approximieren wir die Normalenableitung nT ∇u über Punktauswertungen. Als
Hilfspunkte, benötigen wir auch Punkte außerhalb des Gebietes:
Ω
Nun gibt es wie bei den Differenzensternen mehrere Möglichkeiten.
Hinweis: Das Neumann Randwertproblem ist nicht eindeutig lösbar. Wir erwarten
also auch für die Diskretisierung eine singuläre Matrix.
Kapitel II (fdm-neumann)
10
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Neumann Randwerte mit finiten Differenzen
Symmetrische Diskretisierung
0 = nT ∇u =
1
2h (u−1,j
− u1,j ) + O(h2), also setze u−1,j = u1.j .
Der 5 Punkt-Stern wird so zu 4u0,j − u0,j+1 − u0,j−1 − 2u1,j = h2f0,j .
Die Steifigkeitsmatrix wird singulär aber unsymmetrisch
Unsymmetrische Diskretisierung
0 = nT ∇u = h1 (u−1,j − u0,j ) + O(h), also setze u−1,j = u0.j .
Der 5 Punkt-Stern wird so zu 3u0,j − u0,j+1 − u0,j−1 − u1,j = h2f0,j .
Die Steifigkeitsmatrix wird singulär und symmetrisch. Die Konvergenzordnung
ist durch die niedrige Approximation der Normalenableitung nicht beeinflusst.
Kapitel II (fdm-neumann02)
11
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
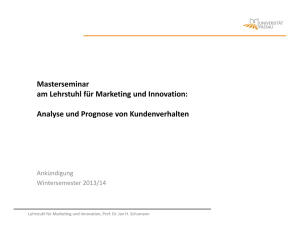
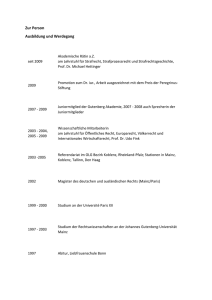
Fehlerordnung (3): Neumann und Dirichlet Randbedingungen
−u′′(x) = π(−2 sin(πx) + π(1 − x) cos(πx)) − 2
mit u′ (0) = 0 und u(1) = 2
diskrete L∞−Norm
2
−2
10
−4
1.5
Fehler
10
−6
10
1
−8
10
−10
10
0.5
0
C*h2
Fehler
2
0.2
0.4
0.6
0.8
1
4
10
10
Anzahl der inneren Knoten
3-Punkt-Approximation
Kapitel II (einführung10)
12
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Randwerte bei Krummen Rändern
Bei Gebieten mit krummen Rändern trifft unser Gitter nicht mehr genau den Rand.
Dirichlet-Randwerte:
• Interpoliere Werte für randnahe Gitterpunkten aus inneren Punkten und den
Randwerten
• oder verwende angepasste Sterne (”Shortley–Weller–Approxmation”)
Neumann-Randwerte:
• Interpoliere Werte für die Euler-Diskretisierung der Normalenableitung.
Kapitel II (FDMKrummeRaender)
13
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Approximation an randnahen Gitterpunkten
a) Beide Punkte im Inneren: u3 wird durch die übliche Finite-Differenzen
Diskretisierung bestimmt, u′1 ist durch eine Randbedingung vorgegeben, zur
Bestimmung von u0 wird eine lineare Interpolation verwendet.
b) Ein Punkt außerhalb des Gebiets: u0 wird durch die übliche FiniteDifferenzen Diskretisierung bestimmt, u′1 ist durch eine Randbedingung vorgegeben,
zur Bestimmung von u1 wird eine lineare Extrapolation verwendet.
Bilder aus Deuflhard und Weiser, Numerische Mathematik 3, 2011, de Gruyter Lehrbuch, leicht modifiziert.
Kapitel II (FDMKrummeRaenderInterpolation)
14
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
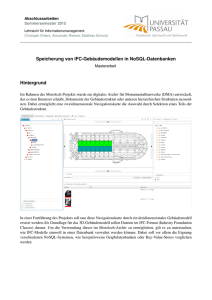
Shortley-Weller-Approximation
Auch für nichtuniforme Gitter können wir Differenzensterne definieren:
N
hN
W
hE
hW
E
hS
S
Die Gewichte hängen natürlich jeweils von den Gitterweiten ab:
−2
hN (hN +hS )
−2
−2
2
2
hW hE + hN hS
hE (hW +hE )
hW (hW +hE )
−2
hS (hN +hS )
Mit diesem Stern können wir an randnahen Punkten arbeiten. Sind alle Gitterweiten
gleich, so erhalten wir den gewöhnlichen 5 Punkte-Stern.
Kapitel II (FDMKrummeRaenderSW)
15
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Krumme Ränder: Neumann Randwerte
Weitere Schwierigkeit: Die Normale ist im Gitter ebenfalls nicht darstellbar.
Interpoliere:
u2′ = u0 + ζ(u2 − u0),
Normalenableitung ein:
setze dies in die approximierte
u1 − u2′
n u=p
+ O(h)
2
1+ζ h
Probleme dabei: Die Position des Punktes B auf der Geraden, sowie der Wert uB
spielen bei dieser Approximation gar keine Rolle.
T
Deuflhard und Weiser, Numerische Mathematik 3, 2011, de Gruyter Lehrbuch
Kapitel II (FDMKrummeRaenderNeumann)
16
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Patching
• Zerlege komplizierte Geometrien in einfache Teile (patches)
• Diskretisiere jedes Teil mit einem
unterschiedlichen Schrittweiten)
äquidistanten
Gitter
(mit
jeweils
• Füge die Teile im Gleichungssystem geschickt wieder aneinander
Beispiel: Autoreifen mit verfeinertem Gitter am Profil:
Kapitel II (FDMPatching)
17
Prof. Dr. Barbara Wohlmuth
Lehrstuhl für Numerische Mathematik
Randangepasste Gitter
• Randangepasstes Gitter um ein Auto
Deuflhard und Weiser, Numerische Mathematik 3, 2011, de Gruyter Lehrbuch
Kapitel II (FDMRandangepasst)
18