Erweiterung des NMR-Versuchs im F
Werbung

RUHR-UNIVERSITÄT BOCHUM
Erweiterung des NMR-Versuchs
im F-Praktikum
um eine computergesteuerte Steuerung
Bachelorarbeit im Studiengang „Bachelor of Science“
im Fach Physik
Institut für Experimentalphysik I
Arbeitsgruppe Polarisiertes Target
Erweiterung
des NMR-Versuchs im F-Praktikum
um eine computergesteuerte
Steuerung
Bachelorarbeit im Studiengang
„Bachelor of Science“
im Fach Physik
An der Fakultät für Physik und Astronomie
der
Ruhr-Universität Bochum
von
Stefan Schweer
aus
Bochum
Wintersemester 2011/12
Betreut durch Prof. Dr. Werner Meyer
Zusammenfassung
Der NMR -Versuch im Fortgeschrittenen-Praktikum soll Studierenden einen Einblick in
das Verfahren der gepulsten NMR bieten.
Das NMR-Gerät der Firma Teachspin verwendet einen Permanentmagneten dessen Magnetfeldinhomogenitäten durch vier Gradientenspulen kompensiert werden müssen um
verwertbare Ergebnisse zu erreichen. Die Optimierung der Gradientenspulen ist allerdings
sehr zeitaufwändig und nicht immer reproduzierbar. Diese Bachelor-Arbeit behandelt daher die Umsetzung einer computergestützen Anpassung dieser Feldgradienten.
Da sich die Gradientenspulen des Gerätes nicht extern steuern lieÿen wurde die Steuerelektronik des Gerätes so modi ziert dass sich eine externe Endstufe an die Gradientenspulen anschlieÿen lässt. Die Endstufe muss dabei bestimmte Parameter erfüllen, so dass
diese extra für diesen Zweck entwickelt wurde. Angesprochen wird diese wiederum über
eine National Instruments DAQ-MX 6343 USB-Schnittstelle. Auf diese Weise können die
Gradienten nun durch ein Labview-Programm geregelt werden.
Inhaltsverzeichnis
i
Inhaltsverzeichnis
Einführung
1
1 Physikalische Grundlagen
1.1 Der Drehimpuls . . . . . . . . . . . . . . .
1.2 Magnetisches Moment . . . . . . . . . . . .
1.3 Magnetisches Spinmoment . . . . . . . . .
1.4 Der Spin im Ein uss externer Magnetfelder
1.4.1 Präzession und Larmorfrequenz . .
1.4.2 Zeeman-Aufspaltung . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
3
4
5
5
6
2 Grundlagen der kernmagnetischen Resonanz
2.1 Die NMR Spektroskopie . . . . . . . . . . .
2.2 Magnetisierung . . . . . . . . . . . . . . . .
2.3 Bloch Gleichungen . . . . . . . . . . . . . .
2.4 Relaxation . . . . . . . . . . . . . . . . . . .
2.5 Das mitrotierende Bezugssystem . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
8
9
10
11
.
.
.
.
.
14
14
15
15
16
18
4 NMR-Versuch im F-Praktikum
4.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1 Teachspin PS2-A p/cw-NMR Spektrometer . . . . . . . . . . . . . .
4.2 Bisheriger Homogenisierungsablauf . . . . . . . . . . . . . . . . . . . . . .
19
19
19
21
5 Erweiterung des Aufbaus
5.1 Elektronik . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Signalverstärker . . . . . . . . . . . . . . . . . . . . .
5.2 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Allgemeines zu Labview . . . . . . . . . . . . . . . . .
5.2.2 Programm zur Homogenisierung der Feldgradienten
22
22
22
26
26
29
3 Methoden der NMR und ihre Unterschiede
3.1 Continuous Wave NMR . . . . . . . . .
3.2 Gepulste NMR . . . . . . . . . . . . . .
3.2.1 Der Anregungspuls . . . . . . .
3.2.2 Freier Induktionszerfall FID . .
3.2.3 Die Fourier-Transformation . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Fazit
i
Abbildungsverzeichnis
ii
Literaturverzeichnis
iii
Danksagung
iv
Einführung
1
Einführung
Magnetische Resonanz bezeichnet allgemein die resonante Anregung von Übergängen
zwischen Energieniveaus eines Kern- oder Elektronenensembles. Resonanz bedeutet in
diesem Fall, dass die Apparatur abgestimmt ist auf die Präzessions-Frequenz der magnetischen Momente, der sogenannten Larmorfrequenz die sich beim Anlegen eines externen
Magnetfeldes ausbildet. Ein groÿer Vorteil des Resonanz-Falles ist, dass die Au ösung sehr
fein ist. Somit lässt sich mit dieser Methode ein sehr guter Aufschluss über die Prozesse
auf atomarer Ebene gewinnen, somit gewährt diese Methode einen guten Einblick in die
Prozesse auf atomarer Ebene,und lässt Rückschlüsse auf die Probenbeschaffenheit in einer
Präzision wie mit kaum einer anderen Methode zu. Wegen dieser Vorteile wird die NMRSpektroskopie heutzutage bei Chemikern, Biologen und Physikern, aber auch in anderen
wissenschaftlichen und technischen Disziplinen häu g eingesetzt.
Aufgrund der groÿen Verbreitung des Verfahrens sollten auch Studierende der Physik während ihres Studiums Bekanntschaft mit dieser Methode der Strukturaufklärung machen.
Zudem führt die Vorbereitung des Versuches zu einem vertieften Verständnis der quantenmechanischen Grundlagen.
In dieser Arbeit werden kurz die physikalischen Grundlagen der NMR-Spektroskopie erläutert um dann auf die Schwierigkeiten der Abstimmung des Gerätes und der damit einhergehenden Motivation, diese zu Automatisieren, einzugehen. Darauf folgend wird kurz
auf die Entwicklungsumgebung Labview und das Platinen-Design mit der CAD-Software
Eagle eingegangen. Im Anschluss wird die erarbeitete Lösung vorgestellt, sowie die Einüsse auf die Messergebnisse betrachtet.
1 Physikalische Grundlagen
2
1 Physikalische Grundlagen
In diesem Kapitel werden kurz die für das Verständnis dieser Arbeit wichtigen physikalischen Grundlagen u.a. aus der Kernphysik, der Elektrodynamik sowie der Quantenmechanik wiederholt.
1.1 Der Drehimpuls
~ durch das KreuzIm Gegensatz zur klassischen Mechanik, in welcher der Drehimpuls L
produkt der Vektoren p~ und ~r gegeben ist,
~ = ~r × p~
L
(1.1)
jz
mj
wird in der Quantenmechanik ein drehimpulsartiger
2
2~
Zustand durch Quantenzahlen beschrieben. Diese Quan1
~
tenzahlen sind zum Einen die Drehimpulsquantenzahl
~
j, die mit dem Betrag verknüpft ist, und zum Anderen
j
die magnetische Quantenzahl mj als Orientierungsanga0
0
be bezüglich einer Vorzugsrichtung (im Allgemeinen die
−1
−~
Richtung des externen Magnetfeldes).
−2
−2~
Die Quantenzahl j kann nur de nierte ganz-(0,1,2,...) oder
1 3
halbzahlige ( 2 , 2 ,...) Werte annehmen, sie unterliegt einer Quantelung. Durch Anwendung des Drehimpulsope- Abb. 1.1: Drehimpuls in
rators Jb2 erhält man den Eigenwert des jeweiligen Zustanz-Richtung
des der dessen absolute Gröÿe repräsentiert:
Jb2 |jmj i = ~2 j(j + 1)|jmj i
(1.2)
Da der Eigenwert gleich dem Betragsquadrat des Drehimpulses ist ergibt sich für den Betrag von ~j :
p
(1.3)
|~j| = ~ j(j + 1)
Die häu g verwendeten Begriffe wie z.B. Spin- 21 -Teilchen beziehen sich hierbei nicht auf
den Betrag des Spins bzw. Eigendrehimpulses des Teilchens sondern auf dessen maximale
z-Komponente.
Die Quantenzahl mj gibt den Anteil des Drehimpulses in eine bestimmte Vorzugsrichtung
(im Allgemeinen die positive z-Achse) an. Analog zu Gl. (1.2) folgt durch Anwenden des
Operators Jbz folgende Eigenwertgleichung:
Jbz |jmj i = ~mj |jmj i
⇒ jz = ~mj
(1.4)
(1.5)
1 Physikalische Grundlagen
3
Da die magnetische Quantenzahl mj nur Werte im Intervall [−j, j] mit ∆mj = ±1 annehmen kann, gibt es 2j + 1 mögliche Einstellungen der Projektion des Drehimpulses auf die
z-Achse, diese sind in Abb. 1.1 veranschaulicht.
Eine genauere Erläuterung der quantenmechanischen Betrachtung ist in [Schwabl, 2005]
zu nden.
1.2 Magnetisches Moment
~ eines geladenen Teilchens imSo wie in der Elektrodynamik durch den Bahndrehimpuls L
mer auch ein magnetisches Dipolmoment µ
~ induziert wird, zeigt sich, dass dies analog für
den Spin eines Teilchens gilt.
Im Bohrschen Atommodell besteht ein H-Atom aus einem Kern und einem auf einer Kreisbahn um diesen rotierenden Elektron, dieses System lässt sich über das Modell einer geschlossenen Leiterschleife darstellen.
In diesem Modell ergibt sich dann das magnetische Moment µ
~ durch Multiplikation des
~
~
Kreisstromes I mit der eingeschlossenen Fläche A (A = A · df , gerichtete Fläche) aus der
nachfolgenden einfachen Rechnung:
~
µ
~ =I ·A
(1.6)
µ
~
Durch die Rotation des Elektrons um den Kern wird
der Kreisstrom I im Rand der Fläche A erzeugt:
I=
p
eω
=−
t
2π
(1.7)
Dabei ist ω die Kreisfrequenz der Rotation und e die
Elementarladung. Die eingeschlossene Fläche, die für
die Berechnung des magnetischen Momentes notwendig ist, berechnet sich wie aus der klassischen Mechanik bekannt:
~ = |~r × p~| = mωr2
|L|
πL
A = πr2 = −
mω
(1.8)
~=− e L
~ = − µB L
~
µ
~ = −I · A
2me
~
(1.10)
A
~r
e−
p~
~
L
(1.9)
Abb. 1.2: Elektron
im Bohrschen
Für Elektronen der Masse me folgt daraus ein magneAtommodell
tisches Moment von:
e~
Die Verwendung des Bohrsches Magneton µB = 2m
e
ist allgemein üblich und ndet sich in den gängigen Lehrbüchern wieder. Der Betrag des
~ der
magnetischen Momentes verhält sich proportional zu dem des Bahndrehimpulses L,
Vektor ist allerdings durch die negative Ladung antiparallel zu diesem ausgerichtet. Dieser
geometrische Sachverhalt wird durch (Abb. 1.2) veranschaulicht.
1 Physikalische Grundlagen
4
1.3 Magnetisches Spinmoment
Da es sich bei dem Teilchenspin ~s der Quantenmechanik veranschaulicht um einen intrinsischen Drehimpuls handelt, wird durch diesen ein sogenanntes magnetisches Spinmoment µ
~
erzeugt, welches proportional zu ~s ist.
Beim Elektron lässt sich daher zum Beispiel folgendes magnetisches Spinmoment analog
zum Bohrschen Atommodell berechnen:
gs µB
e
~s = −
~s = γs~s
(1.11)
µ
~ = −gs
2me
~
e~
µ
~ B = 2m
(Bohrsches Magneton)
(1.12)
e
γs =
|~µs |
=
|~s|
gs µB
~
(Gyromagnetisches Verhältnis Elektron)
(1.13)
Das gyromagnetische Moment ~γs ist dabei der Proportionalitätsfaktor zwischen magnetischem Moment und dem Teilchenspin.
Eine in der Literatur oft genutzte alternative Darstellung ist die über den Landé -Faktor gs ,
kurz g-Faktor. Dieser Faktor gibt die Abweichung der quantenmechanischen Betrachtung
des magnetischen Spinmoments µ
~ zum Wert des klassischen magnetischen Moments bei
gleichem Drehimpuls an. Er ist eine teilchenspezi sche Gröÿe die sich meist nur experimentell bestimmen lässt (z.B. Elektron gs = 2, 0023).
Lediglich der Wert für das Elektron lieÿ sich mittlerweile auch mit Hilfe der Quantenelektrodynamik und der Dirac-Theorie theoretisch herleiten.
Im Fall des Kernspins gilt Ähnliches, hier koppeln allerdings die Spins der Teilchen (Protonen, Neutronen) zum ge~ Zu dieser Problematik kommt erschwesamten Kernspin I.
rend hinzu dass die komplette Substruktur der Nukleonen
aus Gluonen, Valenz- und Seequarks berücksichtigt werden
muss. Der momentane Kenntnisstand reicht noch nicht aus
um theoretische Werte vorhersagen zu können, so dass deren Werte experimenteller Natur sind. Wie das Bohrsche Magneton bei den Elektronen gibt es für Kerne das sogenannte
Kernmagneton µK :
I~
e~
(1.14)
~s = gmuK
µK =
2mp
~
mj = j
~j
µ
~
µz =: µ · µK
Der Zahlenwert dieses Kernmagnetons ist aufgrund des Verp
hältnisses zwischen Elektronen- und Protonenmasse m
ca.
me
2000-fach kleiner als der des Bohrschen Magnetons. Damit
bestimmt sich das magnetische Spinmoment eines Protons
Abb. 1.3: z-Komponente
zu:
gµK ~
magnetisches
µ
~I =
I = γ I~
(1.15)
~
Moment
Wie zuvor beim Spin ist auch hier mit dem magnetischen Moment µ die maximale zKomponente von µ
~ in Einheiten von µK bzw. µK gemeint:
µ=
max(µz )
µK
(1.16)
Dieser Sachverhalt soll durch Abb. 1.3 verdeutlicht werden, eine kleine Übersicht über experimentelle Werte für g-Faktoren und magnetische Momente verschiedener Teilchen ist
in der folgenden Tabelle zusammengefasst:
1 Physikalische Grundlagen
5
Tab. 1.1: g-Faktoren und magnetische Momente verschiedener Teilchen
Teilchen
Spin
µz , max
g-Faktor
p
n
d
e−
1
2
1
2
2,7929 µK
-1,9130 µK
0,8574 µK
1,0012 µB
5,58857
-3,8261
0,8574
2,0023
1
1
2
1.4 Der Spin im Ein uss externer Magnetfelder
Da Teilchen mit Spin, wie im vorherigen Abschnitt gezeigt, magnetische Momente aufweisen, sind sie auch anfällig für Ein üsse äuÿerer Magnetfelder. Die dabei auftretenden
Effekte werden im nächsten Abschnitt kurz erläutert.
1.4.1 Präzession und Larmorfrequenz
Ähnlich wie bei einem Kreisel dessen Drehachse nicht mit seinem Drehimpuls übereinstimmt, übt ein externes Magnetfeld, dessen Richtung nicht mit dem Spin I~ des Teilchens
übereinstimmt, eine Kraft auf dieses aus und bewirkt so eine Präzessionsbewegung um das
Magnetfeld (siehe Abb. 1.4). Dieser Vorgang lässt sich erklären in dem man sich das auf das
Teilchen
wirkende
Drehmoment
T~
genauer
ansieht:
~
T~ = µ
~ ×B
(1.17)
~
~˙ = |dL|
|T~ | = |L|
dt
dϕ
= L sin ϑ
dt
|{z}
(1.18)
(1.19)
=:ω
~
dL
µ
~ ωL
T~
Betrachtet man nun die Gleichungen Gl. (1.17 - 1.19)
sieht man dass für die Larmorfrequenz genannte Präzessionsfrequenz ωL := ω des magnetischen Momentes untenstehende Gleichung gilt:
|T~ | = |~µ|B sin ϑ
⇒ LωL = |~µ|B
|~µ|B
gµB,K
⇔ ωL =
=
B
L
~
dϕ
~
L
~
B
θ
(1.20) Abb. 1.4: Präzession
des magnetischen
(1.21)
Kernmoments
(1.22)
Demnach ist die Larmorfrequenz unabhängig von mj
~
somit also auch unabhängig vom Winkel zwischen Teilchenspin und dem B-Feld.
Unterschiede in der Präzessionsrichtung werden durch unterschiedliche Vorzeichen der Landé
~ entweder parallel
-Faktoren erzeugt. Hierbei gilt zu beachten dass die Vektoren ω
~ L und B
(g < 0) oder antiparallel (g > 0)zueinander stehen (siehe Abb. 1.4). Da bei der Kernen Spin
~ und ω
und das magnetisches Moment parallel zueinander stehen (g > 0), sind B
~ L also
1 Physikalische Grundlagen
6
antiparallel.
1.4.2 Zeeman-Aufspaltung
Beobachtet man eine spezielle Spektrallinie eines Atoms ohne externes Magnetfeld, so sieht
man nur eine einzige Linie, also nur eine einzige Wellenlänge. Bei einem angelegten externen Magnetfeld sieht man jedoch mehrere Spektrallinien. Grund dafür ist die Abhängigkeit der potentiellen Energie eines magnetischen Moments µ
~ von der Stärke des äusseren
Feldes. Diese ist gegeben durch die Gleichung:
~ = −γ J~ · B
~ =
E = −~µ · B
E
Spin- 12 -Kerne
m = − 21
m=
B=0
1
2
B>0
gµB
~
~s · B,
~
gµK ~ ~
− ~ I · B,
für Elektronen
für Kerne
(1.23)
~ = B~ez )
Bei einem Magnetfeld in z-Richtung (B
folgt aus dem Skalarprodukt, dass nur die
z-Komponente des magnetischen Momentes einen
Beitrag zur Energie leistet.
Die z-Komponente ist dabei durch die magnetische
Quantenzahl mj bestimmt, Gl. 1.23 lässt sich somit wie
folgt ausdrücken:
(
gµB mj B,
für Elektronen
E=
(1.24)
−gµK mj B, für Kerne
Abb. 1.5: Aufspaltung der Ener- Durch die mj -Abhängigkeit der Energie wird die urgieniveaus
sprüngliche Entartung der mj -Zustände aufgehoben
und es entstehen 2j + 1 verschiedene Zeeman-Niveaus
mit den durch Gl. (1.24) bestimmten Energien E. Diese
Aufspaltung ist in Abb. 1.5 veranschaulicht. Die Energiedifferenz ∆E zwischen benachbarten Energieniveaus berechnet sich zu:
∆E = |(E(m + 1) − E(m))| = gµK,B B
oder : ∆E = ~ωL = hνL
(1.25a)
(1.25b)
Wird dem System nun Energie in Form von elektromagnetischer Strahlung (im Fall der
NMR Hochfrequenz oder Radiofrequenz) zugeführt (entzogen), können Übergänge der
Frequenz ωL zwischen den einzelnen Zeeman-Niveaus angeregt werden.
2 Grundlagen der kernmagnetischen Resonanz
7
2 Grundlagen der kernmagnetischen
Resonanz
Erste Versuche zur Kern- bzw. Elektronenspinresonanz wurden 1944 von Isidor Isaac Rabi
mit einer modi zierten Stern-Gerlach-Apparatur durchgeführt [Rabi, 2011]. Er beobachtete
dabei, dass einer der Halbstrahlen verschwand, wenn man auf ihn mit Hilfe einer Spule
ein elektromagnetisches Wechselfeld, dessen Frequenz der Larmorfrequenz der Strahlteilchen entspricht, einstrahlte.
Die ersten Veröffentlichungen über NMR1 -Experimente in üssiger unf fester Phase erfolgten 1946 unabhängig voneinander durch F. Bloch [1946] (theoretisch) und Purcell u. a.
[1946] (experimentell), die Purcell-Methode wird dabei sogar heute noch verwendet.
2.1 Die NMR Spektroskopie
Bei der NMR wird ein Probenhalter mit der zu überprüfenden Probe in ein starkes Magnetfeld geführt, die Kernspins der Teilchen präzedieren dabei um die Richtung des externen
Feldes (siehe 1.4.1).
HF-Zufuhr und Detektion
der Resonanz
~ HF
B
Magnet
Mit einer kleinen zusätzlichen Spule erzeugt man jetzt
~ 0 oszillierendes Magnetein senkrecht zum Haltefeld B
~ HF . Die Oszillationsfrequenz entspricht dabei
feld B
genau der Larmorfrequenz ωL der Teilchen. Durch
diese Hochfrequenzstrahlung werden Übergänge zwischen den Zeeman-Niveaus angeregt. Die ursprünglich entlang des Haltefeldes ausgerichtete Magnetisierung der Probe wird um einen kleinen Winkel ausgelenkt. Diese Auslenkung wiederum bewirkt eine
~ um die
Präzessionsbewegung der Magnetisierung M
~ senkrecht
Richtung des Haltefeldes. Die Anteile von M
zu B~0 induzieren in der Messspule eine Wechselspannung.
~0
B
Abb. 2.1: NMR Anordnung
Führt man eine Fourier-Transformation des gemessenen (FID) Signals aus erhält man das NMR-Spektrum
der Probe. Die Struktur des Spektrums gibt dabei Aufschluss auf Art und Umgebung der
Kerne.
1
Nuclear Magnetic Resonance
2 Grundlagen der kernmagnetischen Resonanz
8
2.2 Magnetisierung
~ eines Teilchenensembles wird durch die Summe der magnetischen
Die Magnetisierung M
Momente µ
~ im Probenvolumen V erzeugt.
~ =
M
N
X
µ
~i
i
B0
(2.1)
V
M0
Im Fall des thermischen Gleichgewichtes lässt sich die
Besetzung der verschiedenen Zeeman-Niveaus mit einer Boltzmann-Verteilung beschreiben:
m=
1
2
(2.2)
P (mI ) ∝ e−Emag (mI )/kB T
Durch die unterschiedlichen Besetzungen der Niveaus
entsteht eine Nettopolarisation des Kernensembles.
I
P
hIz i =
~mI e−Emag (mI )/kB T
mI =−I
I
P
m = − 12
(2.3)
e−Emag (mI )/kB T
mI =−I
Diese Nettopolarisation erzeugt eine Nettomagnetisierung der Teilchen.
Abb. 2.2: Magnetisierung
in Feldrichtung
Da bei Raumtemperatur Emag (mI ) < kB T gilt lässt sich die Gleichung unter Berücksichtigung von (Gl. 1.24) und Entwicklung der Exponentialfunktion auf diese Gestalt bringen:
I
P
hIz i =
~mI (1 + γmI B0 /kB T )
mI =−1
(2.4)
I
P
(1 + γmI B0 /kB T )
mI =−1
Mit weiteren Vereinfachungen führt dies letzendlich zu folgender Gleichung:
P
γ~2 I(I + 1)B0
γB0 MI2
=
hIz i =
kB T (2I + 1)
3kB T
(2.5)
Der Kernspin ist mit dem Dipolmoment verknüpft und erzeugt ein Magnetfeld, es entsteht
~
also insgesamt eine Magnetisierung in Richtung des B-Feldes.
Der Erwartungswert Mz der Magnetisierung berechnet sich demnach aus der zuvor bestimmten Polarisation, die verkürzt mit Hilfe der Kernspindichte n dargestellt wird.
Mz =
n
X
µz,i
i
V
= nγhIz i
(2.6)
Setzt man in diese Gleichung nun Gl. (2.4) ein erhält man einen Ausdruck für die Magnetisierung in Feldrichtung im thermischem Gleichgewicht
M0 =
nγ 2 ~2 I(I + 1)
B0
3kB T
(2.7)
2 Grundlagen der kernmagnetischen Resonanz
9
Ähnliches gilt natürlich auch für die Magnetisierung der Elektronen in diesem Ensemble2 .
2.3 Bloch Gleichungen
Felix Bloch stellte in seiner Veröffentlichung Bloch [1946] ein System von drei gekoppelten
Differentialgleichungen auf mit dem sich die Bewegung makroskopischer Magnetisierung
im Magnetfeld beschreiben lässt.
Dieses Gleichungssystem geht aus von der Präzessionsbewegung eines einzelnen magnetischen Momentes im
Ein uss eines äuÿeren Magnetfeldes aus, wie in Gl. (1.24)
hergeleitet.
~
dL
~
= T~ = µ
~ ×B
(2.8)
dt
~ = I~ ergibt sich für
Mit den Beziehungen µ
~ = γ I~ und L
das magnetische Moment:
~
µ
~˙ = γ(~µ × B)
(2.9)
y
B1 (−ω)
~ HF
B
x
B1 (ω)
y
~ entspricht dabei im WeDer Magnetisierungsvektor
M
P
sentlichen µ
~ , die zeitliche Ableitung ist also:
~˙ = γ(M
~ × B)
~
M
(2.10)
Die einzelnen magnetischen Momente µ
~ können zwar
nur quantisierte Werte annehmen, die Magnetisierung
eines Ensembles von Teilchen kann allerdings beliebige
Ausrichtungen einnehmen.
Wie in Abschnitt 2.1 bereits angesprochen, wird nun
zur Anregung der Kerne ein Hochfrequenzfeld senkrecht
zum äuÿeren Magnetfeld in der Gestalt
~ HF = 2B
~ 1 cos ωt
B
B1 (−ω)
~ HF
B
x
B1 (ω)
Abb. 2.3: HF-Feld
(2.11)
angelegt, es tritt eine Präzession auf. Um diese Präzession zu erklären betrachtet man zunächst das oszillierende (HF-)Feld etwas genauer (siehe
Abb. 2.3).
Dabei fällt auf, dass sich ein solches Feld in zwei entgegengesetzt rotierende Magnetfelder
gleicher Kreisfrequenz zerlegen lässt.
B1 cos ωt
B1 cos(−ωt)
~ HF = −B1 sin ωt + −B1 sin(−ωt)
B
(2.12)
0
0
Da −ω weitab der Resonanz liegt, lässt sich diese Frequenz vernachlässigen und das Feld
kann somit als in der xy-Ebene rotierend betrachtet werden.
2
Analog zur Kernspinresonanz (engl: Nuclear Magnetic Resonance , kurz NMR) gibt es auch die sogenannte Elektronenspinresonanz (ESR) bei dieser wird dann die Resonanz der Elektronen gemessen.
2 Grundlagen der kernmagnetischen Resonanz
10
~ 0 also im Uhrzeigersinn in der
Die Kernspins rotieren linkshändig um die Richtung von B
xy-Ebene (siehe Abschnitt 1.4.1). Um eine Anregung zu bewirken wird der Rotationssinn
~ 1 -Feldes entsprechend gewählt, es ergibt sich daher aus der Überlagerung der beiden
des B
Felder:
B1 cos ωt
~ = −B1 sin ωt
B
(2.13)
B0
~
Wenn man das Kreuzprodukt aus Gl. (2.10) nun ausführt und das B-Feld
(Gl. 2.13) in dieses
einsetzt, erhält man ein System aus 3 gekoppelten Differentialgleichungen, den sogenannten Bloch-Gleichungen:
Ṁx = γ(My B0 + Mz B1 sin ωt)
(2.14a)
Ṁy = −γ(Mx B0 − Mz B1 cos ωt)
(2.14b)
Ṁz = −γ(Mx B1 sin ωt + My B1 cos ω)
(2.14c)
Mit diesen Gleichungen hat man nun also eine Beschreibung der Präzessionsbewegung
des Magnetisierungsvektors eines Spin-Ensembles.
Dabei führen sogenannte Relaxationsprozesse dazu, dass die Auslenkung der Magnetisierung zum Gleichgewichtszustand hin abklingt.
2.4 Relaxation
Es gibt verschiedene Prozesse die dafür sorgen dass die Präzession relaxiert, dazu betrachtet man zunächst die Magnetisierung im thermischen Gleichgewicht:
Mz = M0 ,
Mx,y = M⊥ = 0
(2.15)
Wird die Magnetisierung nun aus dem Gleichgewicht gebracht kehrt sie exponentiell in
den Ausgangszustand zurück. Für die longitudinale und die transversale Magnetisierung
gilt dabei folgendes:
M0 − Mz
dMz
=
dt
T1
dM⊥
M⊥
=−
dt
T2
(2.16a)
(2.16b)
Dabei nennt man die Zeitkonstante T1 longitudinale Relaxationszeit, diese steht für die Zeit
in der das System durch Umbesetzung der m1 -Niveaus in den TE3 -Zustand relaxiert. Da
bei diesem Vorgang die freigesetzte Energie an das Gitter abgegeben wird nennt man die
Zeit auch Spin-Gitter-Relaxationszeit.
Die zweite transversale-Relaxationszeit T2 beschreibt die Dauer in der die Präzession aller
magnetischen Moment in Phasenkohärenz bleibt. Die einzelnen magnetischen Momente
erfahren durch Spin-Spin-Wechselwirkungen leicht unterschiedlich lokale Felder, sie präzedieren deswegen unterschiedlich schnell und geraten auÿer Phase. Daher heiÿt diese
3
TE steht für Thermal-Equilibrium (thermisches Gleichgewicht)
2 Grundlagen der kernmagnetischen Resonanz
11
Zeitkonstante auch Spin-Spin-Relaxationszeit.
In realen Versuchen treten noch zusätzliche Effekte auf die ebenfalls die Relaxationszeit
beein ussen, unter anderem systembedingte Inhomogenitäten des Magnetfeldes, Gitterdefekte bei Festkörpern, Dipol-Wechselwirkungen oder Hyperfeinstrukturaufspaltung [siehe Heckmann, 2004].
Die aus diesen Effekten resultierende Zeit T20 wird meist mit der Spin-Spin-Relaxationzeit
T2 zur Zeit T2∗ zusammengefasst4 :
1
1
1
:=
+ 0
∗
T2
T2 T2
(2.17)
Die Werte werden experimentell aus der gemessenen Linienbreite bestimmt.
Da die Kombination der Effekte einer Faltung der jeweiligen Spektren entspricht wird sie
über die Summe der Kehrwerte berechnet. Für ausschlieÿlich lorentz- oder gauÿförmige
Verteilungen ist dies exakt, für andere Verteilungen in guter Näherung eine Addition der
Halbwertsbreiten die ihrerseits reziprok zu den entsprechenden Relaxationszeiten sind. Im
weiteren Verlauf wird aber nur noch T2 benutzt, dieses versteht sich ab jetzt als die aus der
Linienbreite bestimmte, effektive Relaxationszeit.
Betrachtet man mit diesen Erkenntnissen erneut das Differentialgleichungssystem (Gl.
2.14), ergeben sich die Bloch-Gleichungen für das Laborsystem in ihrer üblichen Form:
Mx
T2
My
Ṁy = −γ(Mx B0 − Mz B1 cos ωt) −
T2
(2.18a)
Ṁx = γ(My B0 + Mz B1 sin ωt) −
Ṁz = −γ(Mx B1 sin ωt + MY B1 cos ωt) +
(2.18b)
M0 − Mz
T1
(2.18c)
Den Effekt, der durch das Hochfrequenzfeld auf die Magnetisierung ausgeübt wird kann
man leichter verstehen wenn man das System aus einem mitrotierenden Bezugssystem
betrachtet, in dem die Hochfrequenzkomponente in Ruhe ist.
2.5 Das mitrotierende Bezugssystem
Das mitdrehende Bezugssystem rotiert bezüglich des Laborsystems mit der Frequenz ω
synchron zur Hochfrequenz um die z-Achse. Der Übergang in das rotierende System geschieht über folgende Koordinatentransformation:
!
!
dF~
dF~
=
+ω
~ × F~
(2.19)
dt
dt
Lab
Rot
Die Rotation des neuen Bezugssystem zum Laborsystem ist dabei durch ω
~ = −ω~ez beschrieben, in unserem Fall gilt also:
ωMy0
~ 0 = −ωMx0
ω
~ ×M
(2.20)
0
4
Eine theoretische Herleitung ndet sich in [Aleksandrov, 1966]
2 Grundlagen der kernmagnetischen Resonanz
12
~ -Feld in das rotierende System erhält man:
Transformiert man auch das B
B1
~0 = 0
B
B0
(2.21)
Für die Bewegungsgleichung der Magnetisierung (GL. 2.10) ohne die Relaxationsterme gilt
nach der Transformation:
~0
dM
~0×B
~0 − ω × M
~0
=γ M
dt
(2.22)
B1
0
ω
~
0
~
~
~
0
= γ M × B +
Bef f :=
γ
B0 − Bω
| {z }
~ ef f
B
z, z 0
z, z 0
~0
B
~ω
B
~
M
~ ef f
B
~1
B
~ ef f
B
x0
x0
~1
B
−y 0
~ ef f
(a) Effektives Magnetfeld B
~ ef f nahe
(b) Präzession der Magnetisierung um B
der Resonanz
Abb. 2.4: Betrachtung im rotierenden Koordinatensystem
~ 0 ) ein Drehmoment auf die MaIm rotierenden Bezugssystem wirkt also wegen (~ω B
5
~ der Wirkung von B
~ 0 entgegen . Das hier eingeführte Hilfsfeld B
~ ω ist kein
gnetisierung M
reelles Magnetfeld, es wurde nur eingeführt da die Koordinatentransformation eine ähnliche Wirkung wie die eines Magnetfeldes auf die Magnetisierung ausübt.
~ ef f -Feldes fast
In der Nähe des Resonanzfalles (ω = ωN )6 verschwindet der z-Anteil des B
0
vollständig, es bleibt somit überwiegend der B1 -Anteil in x -Richtung. Die Präzession der
Magnetisierung ndet nun also um das effektive Magnetfeld Bef f statt, die Magnetisierung
klappt in Richtung der y 0 z-Ebene (Abb. 2.4).
5
6
Dieses Drehmoment ist ähnlich wie bei der Coriolis-Kraft auf der Erde nur ein Scheindrehmoment
ωN = gµ~K B0 = γ , Larmorfrequenz der Nukleonen
2 Grundlagen der kernmagnetischen Resonanz
13
~ ef f vollständig in x0 -Richtung, die Magnetisierung M
~0
Sind ω und ωN in Resonanz, zeigt B
0
präzediert also in der y z-Ebene, dies kann man auch als Oszillation der Magnetisierung
zwischen positiver und negativer z-Richtung betrachten. Mit der Magnetisierung oszillieren natürlich auch die einzelnen magnetischen Momente der Kerne, was nur durch permanente Übergänge zwischen den mj -Niveaus möglich ist. Stimmt also die Energie des
eingestrahlten HF-Feldes mit der Energiedifferenz zwischen den durch das umgebende
Magnetfeld erzeugten Zeeman-Niveaus überein, werden Übergänge zwischen diesen hervorgerufen.
Transformiert man nun noch die Bloch Gleichungen in das mitrotierende Bezugssystem,
ergibt sich das folgende Gleichungssystem:
Mx0
T2
My0
Ṁy0 = −(γB0 − ω)Mx0 +γB1 Mz0 −
T2
M 0 − M0
− B1 My0 − z
Ṁz0 =
T
|
{z
} | {z } | {z1 }
Ṁx0 = (γB0 − ω)My0
(1)
−
(2)
(2.23a)
(2.23b)
(2.23c)
(3)
Dabei kann man die Gleichungen in drei Segmente unterteilen [Heÿ, 2005]:
~ 0 um den verbliebenen z-Anteil des Magnetfeldes
1. Präzession der Magnetisierung M
2. Bewegung um die x0 -Achse
3. Relaxationsprozess
Mittlerweile werden die Bloch-Gleichungen nicht nur benutzt um die magnetische Resonanz zu beschreiben, Feynman, Vernon und Helwarth zeigten, dass beliebige quantenmechanische Zweiniveausysteme wie Spin- 21 -Systeme mit den Bloch-Gleichungen beschrieben werden können [Feynman u. a., 1957].
3 Methoden der NMR und ihre Unterschiede
14
3 Methoden der NMR und ihre
Unterschiede
Mit den in Kapitel 2 beschriebenen Grundlagen werden in diesem Kapitel die beiden meist
verwendeten NMR-Methoden vorgestellt.
Diese beiden Methoden funktionieren recht unterschiedlich und haben jeweils verschiedene Vor- und Nachteile.
Bei der cw-NMR1 wird bei konstanter HF-Einstrahlung entweder das Magnetfeld-Feld oder
das HF-Feld durch die Resonanz gefahren, bei der p-NMR2 dagegen werden bei konstantem B-Feld kurze HF-Pulse eingestrahlt.
3.1 Continuous Wave NMR
Da das Hochfahren des Feldes im Verhältnis zu T2 sehr langsam geschieht, lässt sich das
System als in jedem Punkt im Gleichgewicht betrachten.
Im Fall der Resonanz verändert sich die Magnetisierung der Probe und damit die Induktivität der Spule. Diese Änderung der Induktivität wiederum erzeugt eine Leistungsänderung
des aus der Spule und Kapazitäten bestehenden Schwingkreises. Aus der Messung der
Leistungsänderung erhält man nun das gewünschte Signal.
Da die Leistung der verwendeten HF-Strahlung sehr gering ist, wird die Magnetisierung
der Probe kaum beein usst, es wird daher zum Beispiel bei der Polarisationsmessung des
polarisierten Targets eingesetzt [Reicherz, 1994].
1
2
continuous wave NMR
pulsed-NMR
3 Methoden der NMR und ihre Unterschiede
15
3.2 Gepulste NMR
Bei der gepulsten NMR wird, anders als bei der cw-NMR, nicht die jeweilige Leistungsaufnahme des Systems gemessen, man kippt vielmehr die Magnetisierung über einen HFPuls BHF teilweise in die xy-Ebene (siehe Kapitel 2).
Daraufhin untersucht man die transversale Magnetisierung M⊥ durch Messung der in der
Spule induzierten Spannung, aus ihrem Verlauf ergibt sich das NMR-Spektrum. Dieses
Verfahren lässt sich in drei Vorgänge unterteilen:
Puls zur Anregung
Signalaufnahme
Signalauswertung
Die einzelnen Vorgänge werden im Folgenden genauer betrachtet.
3.2.1 Der Anregungspuls
Durch den Anregungspuls wird die Magnetisierung, wie zuvor erwähnt, um den Winkel θ
aus ihrer ursprünglichen Richtung ausgelenkt. Für diesen Winkel zwischen ursprünglicher
und aus dem Puls resultierender Magnetisierung gilt nun:
ZTP
Z
θ=
ωB1 dt = γ
B1 (t)dt = γ
BHF
TP
2
(3.1)
0
Wie bereits in Abschnitt 2.4 kurz angesprochen, sind die Larmorfrequenzen der Kerne auf
Grund von Inhomogenitäten leicht unterschiedlich, die NMR-Linie ist dadurch also verbreitert. Um nun trotzdem in allen Kernen Übergänge zu erzeugen muÿ das Frequenzspektrum des Anregungspulses ebenfalls aufgeweitet werden, dabei gibt es zwei gebräuchliche
Methoden:
Zum Einen die automatische Verbreiterung des Frequenzspektrums durch den sehr kurzen Puls TP ≈ 1 − 5µs:
Man betrachte ein HF-Signal mit folgender Signalform (z.B. Spannung):
u(t) = Ξ(TP , t) · u0 eiΩt
Mit der Heavyside-Funktion ξ(TP , t), deren Werte gegeben sind durch:
(
1 f r|t| ≤ T2P
ξ(TP , t) =
0 sonst
(3.2)
(3.3)
3 Methoden der NMR und ihre Unterschiede
16
Berechnet man nun die Fourier-Transformation dieser Funktion erhält man für das Frequenzspektrum:
TP
− 2
Z
Z−∞
−iωt
A0 e−(Ω−ω)t dt
û(ω) =
u(t) · e
dt =
∞
(3.4a)
TP
2
T
T
A0
i(Ω−ω) 2P
−i(Ω−ω) 2P
=
e
−e
i(Ω − ω
sin (Ω − ω) T2P
= 2A0
Ω−ω
Die Energiedichte, also die Energie dE pro Frequenzintervall dω ergibt sich zu:
!2
2PRF sin (Ω − ω) T2P
dE
=
dω
π
Ω−ω
(3.4b)
(3.4c)
(3.5)
Mit der Leistung PRF des Radiofrequenzpulses.
Die maximale Energiedichte des Pulses liegt nun bei Ω.
dE
PRF TP2
(Ω) =
dω
2π
(3.6)
Damit ist die Halbwertsbreite des Hauptmaximums gegeben durch:
Γω =
5, 566
TP
bzw.
Γν =
8, 886
TP
(3.7)
Die Halbwertszeit verhält sich antiproportional zur Pulszeit, je kürzer der Puls also ist,
desto gröÿer ist die Verbreiterung des Frequenzspektrums (siehe Abb. 3.1).
Als zweite Möglichkeit kann man die Grundschwingung der Frequenz ω mit einer SinusCardinalis-Funktion modulieren:
sinc(x) =
sinx
x
(3.8)
Prinzipiell erfüllen beide Möglichkeiten die Anforderung ein verbreitertes Anregungsspektrum zu liefern, es wird jedoch meist die erste verwendet, da mit der zweiten häu g ein
starkes Rauschen einhergeht.
3.2.2 Freier Induktionszerfall FID
Das Auslenken der Magnetisierung von der z-Achse weg erzeugt eine transversale Komponente der Magnetisierung M⊥ , die nach Ende des Pulses um die Magnetfeldachse präzediert.
M⊥ = M⊥,0 · (sin(ωt)~ex + cos(ωt)~ey )
(3.9)
Für kleine Auslenkungen ist die transversale Magnetisierung proportional zur ursprünglichen Magnetisierung in Feldrichtung:
kleine θ
M⊥ = Mz sin(θ) −−−−→
M⊥
=θ
Mz
(3.10)
3 Methoden der NMR und ihre Unterschiede
17
Abb. 3.1: Verbreiterung des Frequenzspektrums
Bisher wurden die Relaxationsprozesse noch nicht berücksichtigt,auf sie wird im Weiteren
noch eingegangen.
Das Wechselfeld der Magnetisierung verursacht einen magnetischen Fluss.
(3.11)
B⊥ = µ0 M⊥
Betrachtet man nun eine Empfängerspule in der yz-Ebene, so trägt zur induzierten Spannung nur die x-Komponente der Magnetisierung bei.
Z
∂B
Uind = −
dF
∂t
F
Z
∂Mx
= −µ0
dF
(3.12)
∂t
F
= −µ0 F ω cos(ωt)M⊥,0
Die Spannung die in der Spule induziert wird entspricht also im Wesentlichen dem Betrag
der Transversalmagnetisierung gefaltet mit einem Kosinus-Signal. Wenn man nun zusätzlich zur Präzssionsbewegung noch die Relaxationsprozesse betrachtet
dM⊥
M −⊥
=−
dt
T2
(3.13)
und in die komplexe Schreibweise wechselt, so gilt für das FID-Signal:
UF ID = U0 e
iωN t
− T1
·e
2
= U0 e
iωN − T1
2
t
(3.14)
Das so beschriebene Signal ist lediglich für eine Frequenz die idealisierte Form eines FIDSignals,es ist aber gut geeignet um zu zeigen,wie das FID-Signal in das NMR-Spektrum
überführt wird.
3 Methoden der NMR und ihre Unterschiede
18
3.2.3 Die Fourier-Transformation
Das Überführen von UF ID in das Spektrum funktioniert nun mittels einer Fourier-Transformation
Z∞
UF ID (t) 7−→ ÛF ID (ω) =
U0 e
(iωN − T1 )t
2
· e−iωt
0
=
=
=
−U0
i(ωN − ω) −
1
T2
1
)
T2
1
T2
−U0 (i(ωN − ω) +
−(ωN − ω)2 −
U0 T12
ω)2
1
T2
(ωN −
+
|
{z
}
RE (ÛF ID (ω)))
+i
U0 (ωN − ω)
1
ωN − ω)2 + 2
(
T2
|
{z
}
IM (ÛF ID (ω))
(3.15)
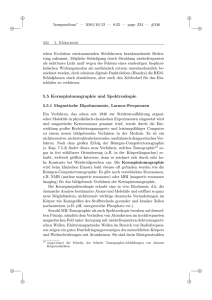
Der Realteil dieser Gleichung ist dabei dem absorbtiven, der Imaginärteil dem dispersiven
Signalanteil zugeordnet. An der Gleichung sieht man dass das Absorptionssignal die Form
einer Lorentzkurve annimmt (siehe Abb. 3.2)3 .
(a) Dispersionssignal des leichten Mineralöls
(b) Absorbtionssignal von Butanol
Abb. 3.2: Absorptions und Dispersionssignal
Die Halbwertszeit Γ des absorbtiven Signalanteil ist durch die transversale Relaxationszeit
T2 bestimmt:
Γω =
2
T2
bzw. Γν =
1
πT2
(3.16)
Ein solches absorbtives Signal wird auch benutzt um die Homogenität des Magnetfeldes
zu optimieren (mehr dazu unter 5.2).
3
mehr zu diesen Signalen siehe [Schmidt, 2010]
4 NMR-Versuch im F-Praktikum
19
4 NMR-Versuch im F-Praktikum
Der Fortgeschrittenen-Praktikums Versuch 306
Gepulste Nukleonen-Resonanz-Spektroskopie pNMR behandelt pNMR-Untersuchungen
verschiedener Stoffe um Studierenden die Grundlagen des Kernspins und der NMR-Spektroskopie
nahezubringen.
4.1 Aufbau
Für diesen Versuch wird ein PS2-A p/cw-NMR Spektrometer der Firma Techspin verwendet. Zur Messung der Signale wird an diesem ein Oszilloskop angeschlossen.
4.1.1 Teachspin PS2-A p/cw-NMR Spektrometer
Das Gerät setzt sich aus drei Bauteilen zusammen, dem Permanentmagneten mit eingebautem, regelbaren Hochfrequenzschwingkreis, dem PS2-Controller für die Temperatur und
Gradientensteuerung und dem Mainframe der wiederum aus vier Funktionsmodulen und
der Stromversorgung besteht, diese sind in einem 19”-Gehäuse untergebracht. Die Span-
Abb. 4.1: Vereinfachte Darstellung des Versuchsaufbaus
nung die durch die Spinpräzession in der Spule induziert wird ist sehr gering, um das
Signal auf dem Oszilloskop sichtbar machen zu können wird diese Spannung im Receiver
verstärkt (siehe Abb. 4.1).
4 NMR-Versuch im F-Praktikum
20
Receiver
Dies geschieht durch einen fest eingestellten low ratio noise ampli er (LNA), dieser
rauscharme Vestärker kann eine Verstärkung von ca. 20dB erzeugen, der Rauschabstand
beträgt 2,5dB.
Das verstärkte Signal lässt sich nun durch einen weiteren, variabel einstellbaren, Verstärker
über den gain-Knopf zwischen 0 und 80 dB Verstärkung regeln. Hinter diesen Verstärker
ist ein Bandpass Filter geschaltet, der das Signal von störenden Frequenzen auÿerhalb der
Resonanz zu säubern.
Der Frequenzbereich dieses Bandpass-Filters lässt sich entweder auf die Larmorfrequenz
von Protonen oder Fluorkernen einstellen. Das Signal wird danach auf folgende signalverändernde Ausgänge geleitet:
RF Out: hier liegt eine gepufferte Version des Signals an
Env Out: an diesem Ausgang wird das Signal durch einen Einhüllenden- und einen
Phasensensitiven-Detektor geführt.
Der Einhüllenden-Detektor klappt die negativen Werte der Schwingung in den positiven Bereich und legt dann eine einhüllende Kurve über diese rein positiven Signale.
Diese Einhüllende wird am Env Out ausgegeben.
I/Q Out: Am I Out liegt das Produkt des Ref In und dem Signal, an Q Out das Produkt
des durch den Phase Splitter um 90◦ gedrehten Ref In und dem Signal.
Synthesizer
Der Synthesizer erzeugt die Radiofrequenz die für die Anregung der Spins benötigt wird.
Er kann Frequenzen in einem Bereich von 1 MHZ bis zu 30 MHz ausgeben.
Im Allgemeinen werden im Laufe des Versuchs jedoch nur Frequenzen in einem schmalen
Bereich um 21MHz benutzt Einstellen lassen sich folgende Parameter, wobei für die pNMR
vor allem der erste Wert von Bedeutung ist.
F: Frequenz der Hochfrequenzstrahlung
P: die relative Phase des Referenzsignals
A: Amplitude des CW RF Signals
S: Sweep der Radiofrequenz
Pulse Programmer
Der Pulse Programmer bietet folgende Einstellmöglichkeiten der Puls-Parameter:
4 NMR-Versuch im F-Praktikum
21
A: Länge des ersten Pulses
B: Länge des zweiten Pulses
τ : Zeit zwischen den Pulsen
N: Anzahl der nach A folgenden Pulse
P: Periodendauer eines gesamten Pulsdurchlaufs (Zeit zwischen den einzelnen Pulsen)
4.2 Bisheriger Homogenisierungsablauf
Der verwendete Permanentmagnet weist wie alle realen Magneten Feldinhomogenitäten
auf. Diese müssen, um verwertbare Signale zu erhalten mit Hilfe der verstellbaren Gradientenspulen im Bereich der Probe kompensiert werden.
Für diesen Vorgang wird nach der in [Wiesche, 2009] beschriebenen Methode gearbeitet:
Die Module sind dabei wie folgt miteinander zu verbinden:
Blanking In (Receiver) - Blanking Out (Pulse Programmer)
Ref In (Receiver) - Ref Out (Synthesizer)
I und Env Out (Receiver) - Oszilloskop (Channel 1 und 2)
Pulse In I und Q (Synthesizer) - Pulse Out I und Q (Pulse Programmer)
Pulsed RF In (Receiver) - Pulsed RF Out (Synthesizer)
Sync Out (Pulse Programmer) - ext. Trigger (Oszilloskop)
Nun wird am Synthesizer eine Frequenz von Fc =
21, 6M Hz eingestellt, der Bandpass lter auf p (Protonen) und die Verstärkung auf 75% Die Pulse Länge
ALEN wird am Pulse Programmer auf 5, 50µs mit einer Periode von 0, 1−1s eingestellt. Man bringt nun die
sogenannte Pickup Probe in die Apparatur ein und Justiert die Kapazitäten des Schwingkreises. Danach wird
die Temperaturkontrolle des PS2-Controllers eingestellt
und die Regelkreise geschlossen.
Abb. 4.2: Maximales FID Signal
Jetzt ersetzt man die Pickup Probe durch ein Röhrchen
mit leichtem Mineralöl und misst das FID-Signal. Die Feldgradienten sind optimiert, wenn
ein maximales Signal anliegt (ca. 40V siehe Abb. 4.2).
5 Erweiterung des Aufbaus
22
5 Erweiterung des Aufbaus
Um den im vorherigen Kapitel beschriebenen, teilweise langwierigen und schlecht reproduzierbaren Prozess zu vereinfachen wurde der Aufbau modi ziert. Die dabei vorgenommenen Änderungen werden in diesem Kapitel beschrieben.
5.1 Elektronik
Das TeachSpin PS2-A p/cw-NMR Spektrometer bietet ursprünglich keine Möglichkeit die
Spulen extern anzusteuern. Der PS2-Controller musste also modi ziert werden um dieses
zuzulassen.
Zuerst wurden dafür die originalen Kabel von den Drehpotentiometern zu den Verstärkerschaltkreisen durchtrennt und Kippschalter eingelötet um zwischen externer und interner
Regelung umschalten zu können. Die Kippschalter wurden in die Frontplatte des PS2Controllers integriert, die zuschaltbaren Eingänge be nden sich auf der Rückseite (siehe
Abb. 5.1).
An diese Eingänge kann nun die im nächsten Abschnitt beschriebene 4-Kanal Endstufe
angeschlossen werden.
(a) Rückansicht
(b) Frontansicht
Abb. 5.1: PS2-Controller nach der Modi kation
5.1.1 Signalverstärker
Die Gradientenspulen benötigen Ströme von bis zu 4 × 0, 5A, solche Stromstärken kann
die verwendete USB-Schnittstellenkarte trotz aktiver Stromversorgung nicht liefern.
Um die Spulen dennoch mit dem ausgewählten Gerät steuern zu können war es daher
notwendig eine dafür angepasste Endstufe zu fertigen. Die entworfene Schaltung orientiert
5 Erweiterung des Aufbaus
23
sich dabei gröÿtenteils an der originalen Verstärkerschaltung des Gradienten-Controllers
(siehe Abb. 5.2a), die verwendeten Bauteile weichen jedoch aus Gründen der Verfügbarkeit
ab.
Da auch die wichtigsten Teile, die Operationsverstärker OPA569 der Firma Texas Instruments, durch ähnliche Bauteile, TDA2050 der Firma STMicroelectronics N.V. ersetzt wurden, musste die Schaltung auf deren Eigenheiten abgestimmt werden. Die verwendeten
Operationsverstärker wiesen in einem ersten, kaum angepassten Entwurf der Schaltung,
starke Eigenschwingungen und teilweise unvorhersehbares Schaltverhalten auf, daraufhin
wurde die Schaltung entsprechend des Datenblattes der TDA2050 angepasst. In Abb. 5.2b
ist die endgültige Schaltung zu sehen, diese ist in dem Gerät vierfach verbaut.
(a) Auszug aus dem Schaltplan des TeachSpin PS2-Controllers
(b) angepasster Schaltplan
Abb. 5.2: Operationsverstärker
Der erste Prototyp der Schaltung mit drei Verstärkerkreisen wurde noch auf einer Rasterlochkarte bestückt, beim Test mit einem Rechtecksignal ohne angeschlossene Spulen zeigt
sich noch ein leichtes Rauschen, sobald die Spulen jedoch angeschlossen werden sind die
Signale wesentlich sauberer.
Um die Qualität der Signale noch weiter zu verbessern wurde ein Platinenlayout mit der
CAD-Software Eagle erstellt und anschlieÿend produziert [CadSoft, 2011].
5 Erweiterung des Aufbaus
24
Platinenlayout mit der CAD-Software Eagle
Die CAD-Software Eagle ist ein Programm zum Erstellen von PCB-Layouts1 . Zunächst erstellt man im sogenannten Schematics Editor den Schaltplan mit den gewünschten Bauteilen. Wechselt man nun in den Board Editor werden die ausgewählten Bauteile dem Schaltplan entsprechend platziert und mit sogenannten Airwires den Signalen folgend verbunden
(Siehe Abb. 5.3). Um jetzt die benötigten Leiterbahnen zu erstellen wählt man das Tool zum
Leiterbahnzeichnen aus, klickt auf den Ursprung eines Airwires und zieht die Leiterbahn
bis zum gewünschten Endpunkt.
Abb. 5.3: Routen der Leiterbahnen
Der Aufbau in Abb. 5.3 ist ein gutes Beispiel wie ein Layout nicht aussehen sollte.
Es sind einige 90◦ Winkel2 vorhanden, es gibt über üssige Durchkontaktierungen, und Leiterbahnen sind unnötigerweise auf der Rückseite geroutet. Nach einigen Optimierungen
macht das Layout einen wesentlich aufgeräumteren Eindruck, es sind nur noch 45◦ -Winkel
vorhanden, die Leiterbahnen sind komplett auf einer Seite geroutet, und das Massepolygon
erstreckt sich, bis auf die Freiräume für die Bauteilkontaktierungen, über die gesamte Fläche der Rückseite (Abb. 5.4).
Die Verlustleistung der Operationsverstärker führt zu einer hohen Wärmeentwicklung,
welche über zwei Kühlkörper an den Schmalseiten der Platine abgeführt wird. Untergebracht ist die fertige Platine samt Kühlkörpern in einem 19”-Gehäuse (siehe Abb.5.5).
Um unabhängig von zusätzlichen Geräten zu sein, sind auch zwei 60W-Netzteile mit jeweils 15V Spannungsdifferenz und einer maximalen Stromstärke von 4A im Gehäuse eingebaut.
1
2
PCB (Printed Circuit Board) ist die englische Bezeichnung für Leiterplatten.
in der Regel wird von 90◦ Winkeln abgeraten da diese wohl anfälliger als 45◦ -Winkel gegen mechanische
Belastungen sind und auÿerdem bei Hochfrequenz zu Re exionen führen können
5 Erweiterung des Aufbaus
25
Abb. 5.4: fertiges PCB-Layout der Endstufe
(a) Blick in das Gehäuse
(b) Frontplatte mit Ein- und Ausgängen
Abb. 5.5: Gehäuseaufbau der fertigen Endstufe
5 Erweiterung des Aufbaus
26
5.2 Software
Die Software zur Homogenisierung wurde mit dem graphischen Programmiersystem Labview3 entwickelt.
In der Arbeitsgruppe Polarisiertes Target wird dieses System häu g zur Entwicklung
von Mess- und Steuerungsprogrammen eingesetzt, da sich zusammen mit den DAQmxSchnittstellen, verhältnismäÿig schnell lauffähige Programmteile zur Messung und Steuerung von Experimenten erstellen lassen.
5.2.1 Allgemeines zu Labview
Ursprünglich wurde Labview von National Instruments 1986 für Macintosh-Computer entwickelt, mittlerweile gibt es aber auch Windows und Linux Varianten. Es wird hauptsächlich in der Meÿ-, Regel- und Automatisierungstechnik eingesetzt.
Die Programmierung geschieht nicht textbasiert wie bei anderen Programmiersprachen,
sondern über eine graphische Ober äche. Ein Programm teilt sich dabei zunächst in zwei
Teile:
dem Frontpanel, hier geschieht beim Programmablauf die Interaktion mit dem Benutzer, beim Programmieren kann hier die spätere Programmober äche gestaltet
werden
dem Blockdiagramm, hier wird das eigentliche Programm erstellt, bei Programmablauf ist dieses Fenster normalerweise nicht sichtbar.
In Abb. 5.6 wird ein kleines Beispielprogrammes gezeigt. Das Programm zeigt im Ablauf
Abb. 5.6: Labview Beispielprogramm
zunächst nur einen Knopf ( Drücken sie hier! ) und eine LED, drückt man den Knopf
wird durch eine Ereignisstruktur ein Dialogfenster ( Haben sie gut geschlafen? ) mit zwei
3
Laboratory Virtual Instrumental Engineering Workbench (Labview) Instruments
5 Erweiterung des Aufbaus
27
Schaltköpfen ( Ja , Nein ) geöffnet. Je nach Antwort erscheint nun, ausgelöst durch eine
Case-Struktur ein weiteres Dialogfenster mit einem Knopf Ebenso! oder Ok, Gute Nacht
und der Ausgabe Dann noch einen schönen Tag! oder Dann sollten sie schlafen gehen .
Zusätzlich wird nach Drücken von OK, Gute Nacht die LED ausgeschaltet.
In Labview sind viele Bauteile selbst kleine Programme. Auch ist es im Allgemeinen
möglich eigene Programme als Bausteine aufzurufen. In Labview heiÿen Bausteine wie
Programme Virtual Instruments (VI).
Um den Überblick über ein Programm behalten zu können emp ehlt es sich, möglichst
viele Funktionen in Sub-VIs zusammenzufassen und das Programm damit überschaubarer
zu halten.
Um Daten in (Sub-)VIs einzulesen oder aus ihnen auszugeben gibt es verschiedene Möglichkeiten: Zum Einen kann man im Frontpanel Ein- und Ausgänge mit Bedien- oder Anzeigeelementen verbinden, man kann Daten in Queues (Warteschlangen)
schreiben um sie in anderen VIs auslesen zu können, es gibt aber auch die Möglichkeit
lokale oder globale Variablen zu verwenden. Um einen fehlerfreien Programmablauf zu
erreichen sollte man bei der Verwendung dieser Variablen aber immer darauf achten nicht
den Daten uss zu unterbrechen.
5 Erweiterung des Aufbaus
28
5.2.2 Programm zur Homogenisierung der Feldgradienten
Die Homogenisierung des Magnetfeldes mit dem hier beschriebenen Programm basiert
auf dem in 4.2 vorgestellten Verfahren. Die Kapazitäten des Schwingkreises lassen sich leider nur mechanisch regeln. Seine Justierung muss also weiterhin manuell erfolgen.
Für die Homogenisierung des Feldes wird das Absorbtionssignal einer Probe leichten Mineralöls gemessen, das Feld ist dann optimal eingestellt wenn die Halbwertsbreite des Signals minimal ist. Der Programmablauf für jeden einzelnen Gradienten lässt sich wie folgt
beschreiben:
Auswahl der verwendeten Kanäle der DAQmx- Schnittstelle durch
den Benutzer
Initialisierung der folgender Parameter der Kanäle:
I Leserate
I Schreibrate
I Anzahl der geschriebenen Samples (Ausgang)
I Anzahl der zu lesenden Samples
I Format des zu schreibenden Signals (z.B. einzelne Samples oder Signalverlauf)
I Format des zu lesenden Signals
Erzeugung eines Triggers am Ausgang mit dem der Lesevorgang am Eingang ausgelöst wird
synchrones Schreiben und Lesen (nach jedem vollständigen Signal wird die Spannung um einen festen Wert erhöht)
Schreiben des gemessenen Signals in einen 2D-Array (Spalte: Signal, Zeile: Spannung am Ausgang)
ermitteln des Maximums jeder Zeile
ermitteln der Halbwertsbreite jedes einzelnen Signals (Zeile)
ermitteln der minimalen Halbwertsbreite aller Zeilen
konstante Ausgabe der entsprechenden Spannung bis zum Beenden des Programmes
Die Abschnitte zur konstanten Ausgabe der entsprechenden Spannungen sind zum Zeitpunkt der Anfertigung dieser Arbeit noch nicht implementiert.
Das Blockdiagramm des Programmes ist in Abb. 5.7 dargestellt:
5 Erweiterung des Aufbaus
Abb. 5.7: Blockdiagramm des Programmes zur Magnetfeldhomogenisierung
29
Fazit
i
Fazit
Die im Laufe dieser Bachelorarbeit gebaute Hardware und die entwickelte Software vereinfachen die Arbeit mit dem PS2-A p/cw-NMR Spektroskop, es ist daher wahrscheinlich,
dass diese beim Fortgeschrittenen-Praktikum eingesetzt werden können um die erzielbaren Ergebnisse zu verbessern, oder zumindest die Durchführung des Versuches etwas zu
vereinfachen. Es war mir leider nicht möglich in der Zeit der Anfertigung dieser Arbeit ein
vollständiges, automatisch ablaufendes Programm zu entwickeln, die wichtigsten Schritte
zur Umsetzung des gewünschten Ergebnisses sind jedoch getan.
Es ist noch Folgendes zu tun:
Automatisierung des Programmablaufs
Gestaltung einer verständlichen Bedienober äche
leichte Veränderung der Schaltung um Beschädigung durch Bedienfehler auszuschlieÿen (Spannungsteiler zur Reduzierung des Eingangssignals)
evtl. automatische Steuerung des Pulses zur Aufnahme von MRT-Bildern
Abbildungsverzeichnis
ii
Abbildungsverzeichnis
1.1
1.2
1.3
1.4
1.5
Drehimpuls . . . . . . . . . . . . . . .
magn. Moment . . . . . . . . . . . . .
z-Komponente magnetisches Moment
Präzession . . . . . . . . . . . . . . .
Aufspaltung der Energieniveaus . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
3
4
5
6
2.1
2.2
2.3
2.4
NMR Anordnung . . . . . . . . . . . .
Magnetisierung in Feldrichtung . . .
HF-Feld . . . . . . . . . . . . . . . . .
Bild im mitrotierenden Bezugssystem
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
8
9
12
3.1
3.2
Verbreiterung des Frequenzspektrums . . . . . . . . . . . . . . . . . . . . .
Absorptions und Dispersionssignal . . . . . . . . . . . . . . . . . . . . . . .
17
18
4.1
4.2
Vereinfachte Darstellung des Versuchsaufbaus . . . . . . . . . . . . . . . .
Maximales FID Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
21
5.1
5.2
5.3
5.4
5.5
5.6
5.7
PS2-Controller nach der Modi kation . . . . . . . . . . . . . . . .
Operationsverstärker . . . . . . . . . . . . . . . . . . . . . . . . . .
Routen der Leiterbahnen . . . . . . . . . . . . . . . . . . . . . .
fertiges PCB-Layout der Endstufe . . . . . . . . . . . . . . . . . . .
Gehäuseaufbau der fertigen Endstufe . . . . . . . . . . . . . . . .
Labview Beispielprogramm . . . . . . . . . . . . . . . . . . . . . .
Blockdiagramm des Programmes zur Magnetfeldhomogenisierung
22
23
24
25
25
28
30
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Literaturverzeichnis
iii
Literaturverzeichnis
[Aleksandrov 1966] Kapitel 1. In: Aleksandrov, Igor V.: The Theory of NUCLEAR MAGNETIC RESONANCE. Academic Press, 1966
[Bloch 1946] Bloch, Felix: Nuclear Induction. In: Phys.Rev. 70 (1946), S. 460 bis 474
[CadSoft 2011] www.cadsoft.de
[Feynman u. a. 1957] Feynman, R.F. ; Vernon, F.L. ; Hellwarth, R.W.: Geometrical representation of the Schrödinger equation for solving maser problems. In: Journal of Applied
Physics 28 (1957), S. 49
[Heckmann 2004] Heckmann, Jörg: Elektronenspinresonanz polarisierbarer FestkörperTargetmaterialien bei 2.5T, Ruhr-Universität Bochum, Dissertation, 2004
[Heÿ 2005] Heÿ, Christian: Ein gepulstes NMR-System zur Polarisationsmessung an Festkörpertargets, Ruhr-Universität Bochum, Diplomarbeit, 2005
[Purcell u. a. 1946] Purcell, E. M. ; Torrey, H. C. ; Pound, R. V.: Resonance Absorption by
Nuclear Magnetic Moments in a Solid. In: Phys.Rev. 69 (1946), S. 37 bis 38
[Rabi 2011] http://www.magnet.fsu.edu/education/tutorials/pioneers/rabi.html
[Reicherz 1994] Reicherz, Gerhard: Kontroll- und NMR-Sytem eines polarisierten Festkörpertargets, Universität Bonn, Diss., 1994
[Schmidt 2010] Schmidt, Nico: Erweiterung des FP-Versuchs gepulste NMR um eine cwKomponente. 2010
[Schwabl 2005] Kapitel 7. In: Schwabl: Quantenmechanik für Fortgeschrittene(QMII). 4.
Springer-Verlag, 2005
[Teachspin ] http://www.teachspin.com
[Wiesche 2009] Wiesche, David: Aufbau eines Versuches zur gepulsten und cw-NMR Spektroskopie. 2009
Danksagung
iv
Danksagung
Ich danke zuerst Prof. Dr. Werner Meyer für die Möglichkeit diese Arbeit anzufertigen.
Desweiteren geht mein Dank an Dr. Gerhard Reicherz für die Hilfe bei der Umsetzung
der Schaltung und geduldigen Beantwortung meiner Fragen. Ebenfalls geht mein Dank
an die restlichen Mitarbeiter der Arbeitsgruppe Polarisiertes Target , im Besonderen an
Jonas Herick und Alexander Berlin für das Korrekturlesen und die Hilfe beim Verständnis mancher Fragen zu den physikalischen Grundlagen. Mein Besonderer Dank geht an
Herrn Dipl. Ing Martin Schäfer, Herrn Richard Prust und Tobias Solowjew des Lehrstuhls
für elektronische Schaltungstechnik für die kurzfristige Produktion meiner Leiterplatte.
Natürlich geht mein Dank auch an meine Familie und meine Freundin für die Unterstützung während dieser Arbeit.