Kapitel 7 Hamiltonsches Prinzip
Werbung

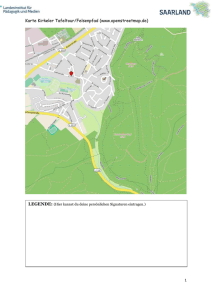
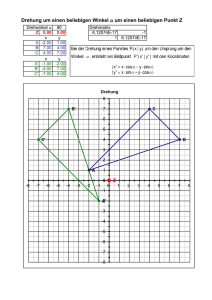
Kapitel 7 Hamiltonsches Prinzip Kapitel 1 und 2 waren der Beschreibung von Bewegungen, der Kinematik gewidmet. Dabei wurde die Bewegung eines Teilches als gegeben betrachtet und die Frage nach der Ursache der Bewegung wurde nicht gestellt. Dies ist die Aufgabe der Dynamik, die die Änderung der gleichförmigen Bewegung auf Wechselwirkungen zwischen Teilchen und Feldern zurückführt, die als Kräfte beschrieben werden. In der klassischen Mechanik wurde dieser Zusammenhang das erste Mal in den Newtonschen Gesetzen formuliert. Wenn das zweite Newtonsche Gesetz in der Form F = mr̈r (7.1) geschrieben wird, erhält man eine Differentialgleichung zweiter Ordnung, die es erlaubt, die Position r (t) eines Teilchens zu jedem beliebigen Zeitpunkt t in der Zukunft oder in der Vergangenheit aus einem Satz von Anfangsbedingungen r (t0 ) und ṙr (t0 ), dem Ort und der Geschwindigkeit zu einer bestimmten Zeit t0 , zu bestimmen. Die Kraft F muss dabei an jedem Ort und zu jeder Zeit bekannt sein. Das zweite Newtonsche Gesetz kann man als differentiellen Ansatz ansehen, bei dem die Bahnkurve eines Teilchens dadurch berechnet wird, dass man die infinitesimale Änderung von Ort und Geschwindigkeit zu einem gegebenen Zeitpunkt bestimmt. Ein anderer Weg, die Bahnkurve zu berechnen, den man als integralen Ansatz bezeichnen könnte, besteht darin, zu untersuchen, wie sich der Wert eines Funktionals F [rr (t)] ändert, wenn die Bahnkurve r (t) variiert wird. Üblicherweise versucht man, für gegebene Wechselwirkungen, ein solches Funktional zu finden, das für die richtige Bahnkurve, also die Bahnkurve die tatsächlich durchlaufen wird, extremal wird. Solche Variationsprinzipien haben in der Physik eine lange Tradition. Der antike Mathematiker Heron von Alexandria formulierte etwa um die Zeitenwende ein Prinzip des kürzesten Weges für die Ausbreitung von Lichtstrahlen, um die Reflektion an Spiegeln zu erklären. Der arabische Mathematiker al-Haitham (965 bis etwa 1040) hat dieses Prinzip 1021 in ein Prinzip der kürzesten Zeit umformuliert, um auch die Brechung von Lichtstrahlen zu erklären. Der französische Mathematiker Pierre de Fermat (etwa 1600 bis 1665) formulierte 55 Abbildung 7.1: Brechung von Lichtstrahlen an Grenzflächen. das Prinzip der kürzesten Zeit 1662 in seiner modernen Form als Extremalprinzip, und ihm zu Ehren wird es auch als Fermatsches Prinzip bezeichnet. 7.1 Fermatsches Prinzip Im Rahmen der Wellenoptik lässt sich dieses Prinzip aus dem Huygenschen Prinzip ableiten, das besagt, dass jeder Punkt einer Wellenfront wieder Ausgangspunkt einer Kugelwelle ist. Wenn ein Weg für das Licht extremal ist (das heißt die Zeit, die das Licht für diesen Weg benötigt, ist minimal oder maximal - oder es liegt ein Sattelpunkt vor), dann ist die Laufzeit des Lichts auf diesem Weg in erster Ordnung gleich der Laufzeit des Lichts auf dicht benachbarten Wegen. Der Phasenunterschied von Lichtstrahlen auf diesen benachbarten Wegen verschwindet dann in erster Ordnung und es kommt zu konstruktiver Interferenz. Bei anderen Wegen, die nicht extremal sind, weisen Lichtstrahlen auf benachbarten Wegen einen Phasenunterschied auf, und es kommt zu destruktiver Interferenz. Abbildung 7.1 veranschaulicht dies am Bespiel der Brechung an der Grenzfläche zwischen zwei Medien mit unterschiedlicher optischer Dichte. Für den Lichtstrahl 3 wird die Laufzeit minimal, und der Phasenunterschied zwischen Lichtstrahl 3 und 4 verschwindet, so dass diese Strahlen konstruktiv interferieren. Die Lichtstrahlen 1 und 2 können dagegen wegen eines Phasenunterschieds destruktiv interferieren. 7.2 Interferenz Betrachten wir ein mikroskopisches Teilchen, das durch eine Wellenfunktion ψ = Aeiφ beschrieben wird. Wir nehmen an, dass sich die Welle ψ auf allen möglichen Wegen ausbreitet, und dass es dabei zu destruktiver und konstruktiver Interferenz kommen kann. Sowohl der Vorfaktor A als auch die Phase φ hängen von Ort r und Zeit t ab. Der Einfachheit halber gehen wir aber davon aus, dass sich A nur sehr langsam mit r und t ändert. Die Interferenz zwischen zwei Wellen, die verschiedene Wege genommen haben, hängt dann nur von der Phase ab, die wir in der Form φ = k · r − ωt (7.2) 56 schreiben. Dabei ist ω = 2πν die Kreisfrequenz und k der Wellenvektor mit dem Betrag |k| = 2π/λ. Längs eines infinitesimalen Wegstückes dr ändert sich die Phase dann um dφ = k · dr − ω dt (7.3) Das Wegstück können wir in Abhängigkeit vom Impuls p = m dr/dt als dr = vdt = pdt/m schreiben, wobei m die Masse des Teilchens ist. Für die Änderung der Phase erhalten wir dann 1 k · p − ω dt . (7.4) dφ = m Um die Abhängigkeit der Phasenänderung von der Energie E und dem Impuls p des mikroskopischen Teilchens zu erhalten, verwenden wir die Planckformel E = h̄ω (mit h̄ = h/2π) und die de-Broglie-Wellenlänge λ = h/|p|. Für den Impuls schreiben wir dann p = h̄k. Die Phasenänderung lautet dann 1 p2 − E dt . (7.5) dφ = h̄ m Identifizieren die Differenz aus kinetischer Energie (T = p2 /2m) und potentieller Energie (V = E − T ) als Lagrange-Funktion L = T − V , dann folgt dφ = 1 L dt . h̄ (7.6) Durch Integration über die Zeit erhalten wir dann die Phasendifferenz zwischen den Zeitpunkten t1 und t2 : 1 t2 φ2 − φ1 = L dt . (7.7) h̄ t1 Das Integral auf der rechten Seite von (7.7) bezeichnen wir als Wirkung t2 S= L dt . (7.8) t1 Damit zwei Wellen konstruktiv interferieren können, müssen sie die gleiche Phasendifferenz φ2 − φ1 aufweisen, das heißt die Wirkung (7.8) muss gleich sein. Nehmen wir an, eine Welle nimmt einen Weg, für den die Wirkung extremal wird, das heißt benachbarte Wege führen zu praktisch der gleichen Wirkung. In diesem Fall wird sich die Welle mit allen Wellen, die auf benachbarten Wegen gelaufen sind, konstruktiv interferieren, das heißt die Wahrscheinlichkeit, das Teilchen auf diesem Weg zu finden ist groß. Wenn die Wirkung sehr groß gegenüber h̄ ist, wie das bei makroskopischen Teilchen der Fall ist, dann führen schon kleine Abweichungen von dem Weg mit extremaler Wirkung zu destruktiver Interferenz, und das Teilchen ist nur längs einer scharf abgegrenzten Bahn zu finden. 57 7.3 Hamiltonsches Prinzip Ein Teilchen, dessen Bewegung auf die x-Achse beschränkt sei, befinde sich zum Zeitpunkt t1 am Ort x1 und zur Zeit t2 am Ort x2 . Das Hamiltonsche Prinzip besagt nun, dass es mindestens eine Funktion L(x, ẋ) gibt, so dass die Bahnkurve x(t) zwischen diesen beiden Randpunkten derart verläuft, dass die Wirkung S, die durch das Integral t2 L(x, ẋ, t) dt, (7.9) S= t1 definiert wird, minimal wird, sofern die Zeitpunkte t1 und t2 nicht zu weit voneinander entfernt sind. Die tatsächlich durchlaufene Bahnkurve x(t) unterscheidet sich also von allen anderen Bahnkurven dadurch, dass sie zu einer kleineren Wirkung S führt. Wenn wir die einschränkende Bedingung für die Länge des Zeitintervalls t2 − t1 weglassen wollen, müssen wir das Hamiltonsche Prinzip etwas allgemeiner formulieren: die Wirkung wird dann für die tatsächliche Bahnkurve stationär, das heißt es wird entweder die kleinstmögliche oder die größtmögliche Wirkung erzielt, oder aber die Wirkung hat eine Art von verallgemeinertem Wendepunkt. Die Wirkung ist mathematisch gesehen ein Funktional, das heißt in diesem Fall die Abbildung aus der Menge möglicher Bahnkurven auf die Menge der reellen Zahlen. Obwohl in der Definition der Wirkung, (7.11), auch die Ge˙ auftaucht, verwenden wir nur die Bahnkurve x(t) als Argument schwindigkeit x(t) dieses Funktionals, S = S[x(t)] (7.10) denn die Geschwindigkeit ẋ(t) wird eindeutig durch die Bahnkurve x(t) bestimmt. Das Hamiltonsche Prinzip fordert nur die Existenz einer geeigneten Funktion L, die wir im Folgenden als Lagrange-Funktion bezeichnen werden, sagt aber nichts darüber aus, wie diese Funktion aussieht. Wir werden später allgemeine Eigenschaften der Lagrange-Funktion festlegen. Wie diese aber genau aussieht, hängt von den betrachteten physikalischen Objekten ab, die untersucht werden, und von den Wechselwirkungen zwischen diesen Objekten. Wir können das Hamiltonsche Prinzip leicht für die Bewegung eines Teilchens im dreidimensionalen Raum verallgemeinern, indem wir in (7.9) die x-Koordinate durch den Ortsvektor r ersetzen. Die Wirkung lautet dann t2 S= L(r, ṙ, t) dt . (7.11) t1 7.4 Bewegung im unbeschleunigten System Betrachten wir als Beispiel die kräftefreie Bewegung einer einzelnen, punktförmigen Masse m. Wenn wir uns speziell in einem Inertialsystem befinden, schreiben 58 Abbildung 7.2: Verlauf der Geschwindigkeit für einen freien Massenpunkt. wir die Lagrangefunktion versuchsweise als Differenz L = T − V zwischen der kinetischen Energie T und der potentiellen Energie V . Im Abschnitt (??) finden wir einige Gründe für diese Wahl. Die potentielle Energie können wir in diesem Fall gleich Null setzen, so dass die Lagrangefunktion gleich der kinetischen Energie ist, m (7.12) L = v2 . 2 Befindet sich das Teilchen zu den Zeitpunkten t1 und t2 an den Orten r1 und r2 , dann ist die Wirkung durch m t2 2 S= v dt (7.13) 2 t1 gegeben. Intuitiv kann man schon erkennen, dass die rechte Seite von (7.13) minimal wird, wenn die Geschwindigkeit konstant ist und damit gleich der Durcht schnittsgeschwindigkeit v = t12 v dt. Jede Abweichung von der Durchschnittsgeschwindigkeit macht das Integral nur größer aber nie kleiner. Diese intuitive Erwartung lässt sich auch ohne großen Aufwand beweisen, indem wir die Wirkung in zwei Summanden aufspalten, m t2 2 v dt (7.14) S = 2 t1 m t2 2 S = −v + v2 + v2 dt 2 t1 m t2 2 S = −v + 2vv + (v − v)2 dt 2 t1 m m t2 2 S = (t2 − t1 )v + (v − v)2 dt , 2 2 t1 von denen der erste Summand konstant und der zweite entweder größer als Null ist oder gleich Null ist. Der zweite Fall tritt ein, wenn sich der Massenpunkt zu jedem Zeitpunkt mit der konstanten Durchschnittsgeschwindigkeit v bewegt. Die geradlinig-gleichförmige Bewegung, r(t) = r1 + (t − t1 )v, ist also genau die Bahnkurve, die die Wirkung (7.13) des kräftefreien Massenpunktes minimiert. Diese 59 Bahn, die gerade Verbindung, ist gleichzeitig auch der kürzeste Weg, den der Massenpunkt von r1 zu r2 nehmen kann. Hier sehen wir eine Analogie zum Fermatschen Prinzip, nach dem das Licht sich in Bereichen mit konstanter Lichtgeschwindigkeit den kürzesten Weg zwischen zwei Punkten wählt. Für den einfachen Spezialfall der kräftefreien Bewegung eines Massenpunktes haben wir gesehen, dass das Hamiltonsche Prinzip zum gleichen Ergebnis führt wie die Newtonsche Mechanik. Später werden wir sehen, dass dies für alle mechanischen Systeme gilt. 7.5 Bewegung im beschleunigten System Das Hamiltonsche Prinzip gilt auch in Nicht-Inertialsystemen. Allerdings müssen wir dann die Lagrangefunktion entsprechend transformieren. Bleiben wir bei dem einfachen Beispiel der kräftefreien Bewegung eines einzelnen Massenpunktes, den wir aber diesmal in einem Koordinatensystem S’ beschreiben wollen, das gegenüber dem ursprünglich gewählten Inertialsystem konstant mit a beschleunigt ist. Die Koordinaten im beschleunigten System S’ lauten dann 1 r = r′ + at2 2 und v = v′ + at , (7.15) sofern die Geschwindigkeit klein gegenüber der Lichtgeschwindigkeit ist, und wir die Galilei-Transformation anwenden dürfen. Wenn wir den Ausdruck für v aus Gleichung (7.15) in die Lagrangefunktion (7.12) einsetzen, erhalten wir für die Lagrangefunktion L′ im beschleunigten System m m L′ (v′ ) = L(v) = v2 = (v′ + at)2 (7.16) 2 2 Wie wir im folgenden Abschnitt zeigen werden, führt diese Lagrangefunktion im beschleunigten Koordinatensystem S’ auf die beschleunigte Bewegung v′ = v − at (7.17) wie wir es entsprechend der Transformationsgleichungen (7.15) erwarten. 7.6 Verallgemeinerte Koordinaten Bisher haben wir ausschließlich kartesische Koordinaten für die Beschreibung physikalischer Gesetze verwendet. Bei vielen physikalischen Gesetzen wird die Formulierung durch die Wahl der Koordinaten bestimmt. Das Hamiltonsche Prinzip dagegen, in seiner kürzesten Form durch δS = 0 (7.18) wiedergegeben, ist offenbar unabhängig von der Wahl der Koordinaten, die wir erst benötigen, wenn wir die Wirkung S explizit beschreiben wollen. Auch wenn 60 die Wirkung im Allgemeinen keine messbare Größe ist, nehmen wir doch an, dass die Wirkung unabhängig von der Wahl der Koordinaten sein soll, da sonst auch die Bewegungsgleichungen von der Wahl der Koordinaten abhängen würden. Die Tatsache, dass die Wirkung S nicht eindeutig ist, dass also verschiedene Wirkungen auf die gleiche Bewegungsgleichung führen können, ändert an dieser Betrachtung nichts. Um nun die Schlussfolgerungen aus dem Hamiltonschen Prinzip so allgemein wie möglich zu halten verwenden wir im Folgenden wo es möglich ist verallgemeinerte Koordinaten (auch generalisierte Koordinaten genannt). Dies gibt uns die Möglichkeit im konkreten Einzelfall solche Koordinaten zu verwenden, die eine möglichst einfache Beschreibung des konkret betrachteten Systems erlauben. Dies werden in der Regel Koordinaten sein, die die Symmetrien des Problems widerspiegeln. Bei Zentralkräften wie der Coulomb- oder der Gravitationskraft, die spährisch symmetrisch sind, also nur vom Abstand zum Zentrum abhängen, sind dies beispielsweise die Kugelkoordinaten r, θ und φ. Betrachten wir ein System aus N Massenpunkten, das durch die 3N kartesischen Koordinaten xi (i = 1, . . . , 3N ) und die dazugehörigen kartesischen Geschwindigkeiten ẋi beschrieben wird. Wenn wir dieses System gleichwertig durch 3N verallgemeinerte Koordinaten qj und verallgemeinerte Geschwindigkeiten q̇j beschreiben können, dann müssen die verallgemeinerten Koordinaten durch eineindeutige (oder bijektive) Funktionen fj aus den kartesichen Koordinaten erhalten lassen: qj = fj (x1 , . . . , x3N , t) mit j = 1, . . . , 3N . (7.19) Da die Funktionen fj bijektiv sein sollen, muss es Umkehrfunktionen gj geben, mit deren Hilfe man die kartesischen Koordinaten aus den verallgemeinerten Koordinaten erhält: xj = gj (q1 , . . . , q3N , t) mit j = 1, . . . , 3N . (7.20) Die verallgemeinerten Geschwindigkeiten q̇ erhalten wir durch Ableitung von (7.19) nach der Zeit: q̇j = dfj dt mit j = 1, . . . , 3N . (7.21) Durch Anwendung der Kettenregel folgt daraus q̇j = 3N ∂fj ∂xi i=1 ∂xi ∂t + ∂fj ∂t mit j = 1, . . . , 3N (7.22) mit j = 1, . . . , 3N . (7.23) oder q̇j = 3N ∂fj i=1 ∂xi ẋi + ∂fj ∂t 61 Die verallgemeinerten Geschwindigkeiten q̇j hängen also von den kartesischen Koordinaten xi und von den kartesischen Geschwindigkeiten ẋi ab. Das Entsprechende gilt auch für die kartesischen Geschwindigkeiten: ẋi = 3N ∂gi j=1 ∂qj q˙j + ∂gi ∂t mit i = 1, . . . , 3N . (7.24) Als besonders einfaches Beispiel betrachten wir die Beschreibung eines Massenpunktes, der sich in der x-y-Ebene bewegt, durch Polarkoordinaten r und φ. Die Transformationsgleichungen für die Koordinaten lauten y (7.25) r = x2 + y 2 und φ = arctan x sowie x = r cos φ und y = r sin φ . (7.26) Für die verallgemeinerten Geschwindigkeiten erhalten wir nach (7.23) xẋ + y ẏ ṙ = x2 + y 2 und φ̇ = −2 y ẋy + xẏ . x x2 + y 2 (7.27) Umgekehrt gilt für die kartesischen Geschwindigkeiten ẋ = ṙ cos φ − rφ̇ sin φ und ẏ = ṙ sin φ + rφ̇ cos φ . 7.7 (7.28) Lagrange-Gleichungen Für ein System, das durch N verallgemeinerte Koordinaten qi beschrieben wird, lässt sich das Wirkungsintegral (7.11) wie folgt verallgemeinern: t2 S= L(q1 , . . . , qN , q̇1 , . . . , q̇N , t) dt . (7.29) t1 Gesucht sind jetzt (als verallgemeinerte Bahnkurve) N Funktionen qi (t), für die die Wirkung S extremal wird. Diese Funktionen sind durch N gekoppelte Differentialgleichungen bestimmt, die als Lagrange-Gleichungen (oder genauer als Lagrange-Gleichungen 2. Art) bezeichnet werden: d ∂L ∂L − = 0 mit i = 1, . . . , N . (7.30) dt ∂ q̇i ∂qi Diese Lagrange-Gleichungen sind nichts anderes als die Verallgemeinerung der Euler-Lagrange-Gleichung (6.19) auf N Koordinaten angewandt auf das Minimierungsproblem δS = 0 für die in (7.29) definierte Wirkung. Ebenso wie das Hamiltonsche Prinzip sind auch die Lagrange-Gleichungen unabhängig von der Wahl der Koordinaten. Um das Verhalten eines physikalischen Systems im Ablauf der Zeit zu beschreiben, können wir nach dem folgenden Schema vorgehen: 62 • Zunächst muss die (oder besser eine) für das System passende LagrangeFunktion gefunden werden. Durch diesen Schritt ist physikalische Beschreibung des Systems bereits festgelegt. • Mit Hilfe der Lagrange-Gleichungen werden dann die Bewegungsgleichungen aufgestellt. • Im letzten Schritt müssen die Bewegungsgleichungen gelöst werden, was häufig nur näherungsweise oder nur mit numerischen Verfahren möglich ist. 7.8 Zusammenfassung Das Hamiltonsche Prinzip besagt, dass sich die Bahnkurve, die ein Teilchen durchläuft, durch die Variation eines Funktionals bestimmen lässt. Ein solches Funktional ist die Wirkung t2 S= L(x, ẋ, t) dt , (7.31) t1 die durch Integration einer (nicht notwendigerweise eindeutigen) LagrangeFunktion L festgelegt wird. Für die tatsächlich durchlaufene Bahnkurve x(t) liefert das Funktional der Wirkung einen extremalen Wert, so dass die Variation der Wirkung für diese Bahnkurve verschwindet: δS = 0 . (7.32) Das bedeutet, dass kleine Änderungen der Bahnkurve in erster Näherung die Wirkung nicht ändern. Unterstellt man dem Teilchen Wellencharakter, dann interferieren benachbarte Bahnkurven konstruktiv. Um für ein konkretes Problem die Bahnkurve zu bestimmen, muss eine passende Lagrange-Funktion gefunden werden, die alle Wechselwirkungen des Teilchens mit seiner Umgebung berücksichtigt. Die Suche nach der richtigen LagrangeFunktion ist gleichwertig mit der Suche nach physikalischen Gesetzen zur Beschreibung von Wechselwirkungen, denn diese Gesetze lassen sich mit dem Variationsprinzip δS = 0 aus der Lagrange-Funktion gewinnen. Wir vermuten, dass sich die Lagrange-Funktion in vielen Fällen als Differenz aus kinetischer und potentieller Energie schreiben lässt: L=T −V . (7.33) Für ein freies Teilchen in einem Inertialsystem führt diese Vermutung zum ersten Newtonschen Gesetz. 63 Das Hamiltonsche Prinzip lässt sich auch auf Nichtinertialsysteme anwenden. In diesen Fällen muss die Lagrange-Funktion entsprechend der Beschleunigung des Bezugssystem angepasst werden, was gleichwertig zur Einführung von Trägheitskräften für Nichtinertialsysteme ist. Das Hamiltonsche Prinzip ist auch unabhängig von der Wahl der Koordinaten. Beschreibt man ein System durch einen beliebigen Satz von verallgemeinerten Koordinaten qi , lautet die Wirkung t2 L(q1 , . . . , qN , q̇1 , . . . , q̇N , t) dt . (7.34) S= t1 Die Bedingung, dass die Variation dieser Wirkung für eine bestimmte N dimensionale Bahnkurve (q1 (t), . . . , qN (t)) verschwindet, ist äquivalent zu den N Lagrange-Gleichungen für die verallgemeinerten Koordinaten: ∂L d ∂L = 0 mit i = 1, . . . , N . (7.35) − dt ∂ q̇i ∂qi 64