Elektrische und magnetische Eigenschaften von Stoffen Version
Werbung

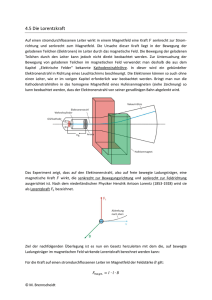
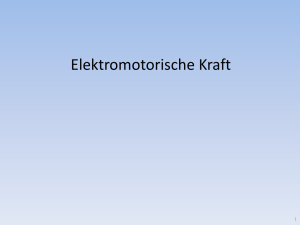
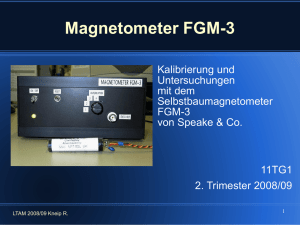
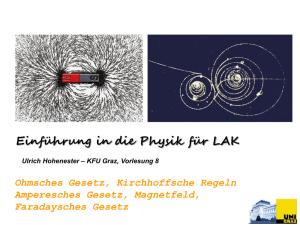
LW10 Elektrische und magnetische Eigenschaften von Stoffen Version vom 1. Oktober 2015 Inhaltsverzeichnis 1 Temperaturabhängigkeit des elektrischen Widerstandes 1.1 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1.1 Begriffe . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1.2 Leitfähigkeit in Festkörpern und Flüssigkeiten . . . . . 1.1.3 Temperaturkoeffizient metallischer Widerstände (PTC) 1.1.4 Temperaturkoeffizient von Halbleitern (NTC) . . . . . 1.2 Aufgabenstellung . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Versuchsaufbau und Durchführung . . . . . . . . . . . . . . . 1.4 Hinweise zur Protokollierung und Fehlerrechnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1 1 1 6 7 8 9 12 2 Magnetische Hysteresekurve 2.1 Grundlagen . . . . . . . . . . . . . . . . 2.1.1 Magnetismus in Materie . . . . . 2.1.2 Diamagnetismus . . . . . . . . . . 2.1.3 Paramagnetismus . . . . . . . . . 2.1.4 Ferromagnetismus . . . . . . . . . 2.1.5 Ferri- und Antiferromagnetismus 2.2 Aufgabenstellung . . . . . . . . . . . . . 2.3 Versuchsaufbau und Durchführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 13 13 15 16 16 21 22 22 3 Empfohlene Zusatzliteratur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes Lehr/Lernziele • Kenntnis zur Abhängigkeit des elektrischen Widerstandes von der Temperatur. • Verstehen und Anwenden der mathematischen Modelle für die Beschreibung der Temperaturabhängigkeit elektrischer Widerstände. • Verstehen und Anwenden komplexer Messaufbauten und Messschaltungen (z.B. Wheatstonebrücke, RC-Integrierglied). • Überblick über die Thematik des Magnetismus in Materie. • Verständnis für das Verhalten von Ferromagneten im magnetischen Wechselfeld. • Erweiterung der Fertigkeiten bezgl. computergestützter Messwerterfassung und Datenverarbeitung. 1 Temperaturabhängigkeit des elektrischen Widerstandes 1.1 Grundlagen 1.1.1 Begriffe Grundlagen der Halbleiterphysik (Bandlücke, Fermienergie, elektrische Leitfähigkeit, pn-Übergang, Kennlinie), NTC, PTC, Temperaturabhängigkeit von Leitfähigkeit bzw. Widerstand, metallische Bindung, Kirchhoff’sche Regeln, Elektrolyte, Anionen und Kationen, Dissoziation, Ionen-Beweglichkeit, Methode der kleinsten Fehlerquadrate 1.1.2 Leitfähigkeit in Festkörpern und Flüssigkeiten Die elektrischen Eigenschaften von Stoffen werden ganz wesentlich durch die Wirkung der in ihnen vorkommenden Elektronen bestimmt. Voraussetzung für das Fließen eines elektrischen Stromes ist in jedem Fall das Vorhandensein von frei beweglichen Ladungsträgern. Unter dem Einfluss eines elektrischen Feldes können sich diese Ladungsträger innerhalb des Stoffes bewegen. Flüssigkeiten Der Widerstand eines elektrischen Leiters ist von seinen Dimensionen und seiner Natur -1- LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes Abbildung 1: Prinzipieller Verlauf der Konzentrationsabhaengigkeit der Leitfähigkeit. abhängig. Der ohmsche Widerstand R wird nach R = ρl/A berechnet, wo l = Länge, A = Querschnitt und ρ = spezifischer Widerstand des Leiters sind. Diese Gleichung gilt auch für Elektrolytlösungen. Anstelle der Länge tritt hier die Entfernung der Elektroden, die man in cm angibt. Statt des Querschnitts setzt man die wirksame Elektrodenoberfläche in cm2 ein. Während bei Metallen Länge und Querschnitt fest vorgegeben sind und leicht berechnet werden können, ist im Falle der Elektrolytlösungen der Quotient l/A für eine bestimmte Geometrie (Gefäß und Elektroden) eine Konstante. Bei den Elektrolyten ist weniger der Widerstand als sein reziproker Wert, der Leitwert, interessant. Man arbeitet daher nicht mit dem spezifischen Widerstand ρ, sondern mit dem spezifischen Leitwert, auch Leitfähigkeit σ genannt. Die Maßeinheit der Leitfähigkeit ist S·m−1 (S = Siemens). Allgemein kann man sagen, dass sich die Leitfähigkeit wie folgt berechnen lässt: σ = e0 · n · µ (1) e0 steht für die Elementarladung, n für die Ladungsträgerdichte und µ für die Beweglichkeit der Ladungsträger. Befindet sich ein z-fach geladenes Ion Az+ in einem elektrischen Feld, so findet eine Wanderung des geladenen Ions zur entgegengesetzt geladenen Elektrode statt. Somit hängt der Widerstand R von der bereits erwähnten Geometrie der Messzelle, von der Art (Größe, Ladung des Ions) und der Konzentration des Elektrolyten ab. Wird die Leitfähigkeit einer Elektrolytlösung in Abhängigkeit von der Elektrolytkonzentration c bestimmt, so erhält man den in Abb. 1 rechts dargestellten prinzipiellen Verlauf. Zunächst erwartet man, dass die Leitfähigkeit eines starken Elektrolyten1 stetig mit der Ionenkonzentration zunimmt, 1 Starke Elektrolyte sind in Lösung vollständig dissoziiert, so dass die Konzentration der Ionen proportional zu der Konzentration des Elektrolyten ist. Dazu gehören ionische Verbindungen wie KCl, NaCl, MgCl2 , CuSO4 etc. und starke Säuren wie H2 SO4 , HCl, HClO4 u.a. Zu dem schwachen Elektrolyten gehören schwache Säuren (z.B. Essigsäure), sowie schwache Basen (z.B. Ammoniak), die in Lösung nicht vollkommen dissoziiert sind. Die starke Abhängigkeit der Leitfähigkeit von der Konzentration, die bei schwachen Elektrolyten beobachtet wird, ist auf das Gleichgewicht zurückzuführen, das sich bei -2- LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes siehe Abb. 1 links. Diese Erwartung bestätigt sich aber nur für den ersten Teil der Kurve (Bereich I in Abb. 1). Mit steigender Konzentration steigt nämlich auch die gegenseitige Behinderung der Ionen, die eine Herabsetzung der Leitfähigkeit zur Folge hat (Bereich II in Abb. 1). Die sich ausbildenden Ionenwolken (Assoziate) führen zur Abschirmung von Ladungsträgern. Deshalb stehen nicht alle Ionen für den Ladungstransport voll zur Verfügung. Darüber hinaus besitzen die Ionenwolken eine geringere Beweglichkeit als die Einzelionen; sie sind dadurch in ihrer Wanderung zwischen den Elektroden des Leitfähigkeitsgefäßes behindert. Bei den schwachen Elektrolyten sinkt mit steigender Konzentration der Dissoziationsgrad, der Folgeeffekt ist dann der gleiche wie bei starken Elektrolyten. Bei einem bestimmten Wert von c wird das Maximum, wo sich beide Effekte gerade kompensieren, erziehlt. Danach tritt trotz Erhöhung der Konzentration eine Abnahme der Leitfähigkeit ein, da der Dissoziationsgrad abnimmt. Allgemein gilt: Die Leitfähigkeit ist abhängig von der Konzentration c. Sie erreicht ihren maximalen Wert, wenn die Zahl der frei beweglichen Ionen am größten ist. Die Leitfähigkeit einer Elektrolytlösung ist stark temperaturabhängig. Ähnlich wie bei einem Gas nimmt die Beweglichkeit der Ionen mit steigender Temperatur T zu. Leitfähigkeitsdaten sind somit immer nur mit einer Temperaturangabe verwendbar. Auch der Dissoziationsgrad ist stark temperaturabhängig. Sowohl Löslichkeit, Dissoziationsgrad, als auch Ionenbeweglichkeit sind temperatur- und materialabhängige Eigenschaften. In der Regel steigt die Ionenbeweglichkeit mit der Temperatur und die Leitfähigkeit wird größer. Dieses Verhalten kann man sich folgendermaßen erklären: Die Viskosität einer Flüssigkeit, gegeben durch Formel 2, wobei η0 (Ausgangsviskosität) und EA (Aktivierungsenergie oder auch „Platzwechselenergie“) materialspezifische Konstanten darstellen, sinkt mit steigender Temperatur. (kB ist die Boltzmannkonstante.) EA η = η0 · e kB ·T (2) Wenn die Viskosität abnimmt, nimmt die Beweglichkeit µ der Ladungsträger zu. Demnach steigt auch die Leitfähigkeit σ. (Vergleiche mit Formel 1) Da die Viskosität exponentiell abnimmt, muss die Leitfähigkeit exponentiell zunehmen. Der spezifische Widerstand ist der Reziprokwert der Leitfähigkeit. Daher muss dieser mit steigender Temperatur exponentiell abfallen. Festkörper In Festkörpern, deren Atomrümpfe mehr oder weniger „fest“ aneinander gebunden sind, können ganze Moleküle oder Atome nicht als Ladungsträger dienen. Hier sind es im Allgemeinen Elektronen aus den Atomhüllen. Allerdings nicht alle Elektronen, sondern nur solche in bestimmten Zuständen - so genannte Leitungselektronen. Elektronen können in einem Festkörper ebenso wie in einem Atom nur diskrete Energiewerte annehmen. Die Wechselwirkung der Elektronen in Festkörpern führt aber dazu, dass jedes Energieniveau in N Niveaus aufgespaltet wird (N enstpricht der Anzahl der Einzelader Ionisierung einstellt. -3- LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes Abbildung 2: Energiediagramm zum Bändermodell tome im Festkörper), die mit 2N Elektronen besetzt werden können. Geht man davon aus, dass sich in einem Festkörper von 1 cm3 Größe etwa N = 1022 Atome befinden, ist die Zahl der möglichen Energieniveaus sehr groß und sie liegen so dicht nebeneinander, dass sie quasi-kontinulierlich erscheinen. Man spricht daher von Energiebändern. Jeder Festkörper besitzt eine Vielzahl an Energiebändern, zwischen denen sich auch Zonen befinden, die keine erlaubten Energiezustände aufweisen, sogenannte Energiebandlücken. Das oberste, von Elektronen (fast) vollständig besetzte Band nennt man Valenzband, das nächsthöhere das Leitungsband. Die Größe dieser Energiebandlücke Eg (Index „g“ steht für „Gap“) zwischen Valenz- und Leitungsband ist charakteristisch für die elektrischen Eigenschaften des Materials. Die Fermi-Energie EF ist eine charakteristische Größe zur Beschreibung von Fermi-Gasen (z.B. Elektronen), einem quantenmechanischen Modell für Teilchen, welches in diesem Rahmen nicht näher behandelt wird. Sie gibt die Besetzungswahrscheinlichkeit von Energiezuständen der Elektronen an. Im Grundzustand (bei T → 0 K) sind alle Energiezustände bis zur Fermi-Energie besetzt, darüber unbesetzt. Mit steigender Temperatur steigt die Besetzungswahrscheinlichkeit überhalb der Fermi-Energie leicht (und sinkt unterhalb auch leicht). Befindet sich die Fermi-Energie innerhalb eines Energiebandes, so können Elektronen bereits bei sehr kleinen Temperaturen T > 0 K, die winzigen Energieunterschiede zwischen besetzten und unbesetzten Energieniveaus überwinden. Liegt die Fermi-Kante innerhalb einer Energiebandlücke (Gap), so benötigen die Elektronen mindestens die Lücken-Energie (Gap-Energie) Eg , um in einen angeregten Zustand (in das Leitungsband) überzugehen. In Leitern liegt die Fermi-Energie innerhalb eines Energiebandes (vgl. Abb. 2). Daher haben einige Elektronen bereits ihren Grundzustand im Leitungsband. Die Elektronen in der Nähe der Fermi-Energie können sich praktisch frei bewegen, da immer freie Energieni- -4- LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes veaus in der Nähe vorhanden sind. Diese Leitungselektronen 2 sind delokalisiert und können mit Hilfe elektrischer Potentiale (Spannung) leicht innerhalb des Festkörpers verschoben werden. Darum nennt man die Leitungselektronen in Metallen auch Elektronengas. Die Größe des elektrischen Widerstandes ist durch zwei Faktoren bestimmt: Die Anzahl der vorhandenen Ladungsträger und die Beweglichkeit der Ladungsträger. Da bei steigender Temperatur die Atomrümpfe stärker schwingen, wird die Bewegung der Elektronen in Metallen stärker behindert und die Leitfähigkeit sinkt. Die Anzahl der Ladungsträger im Metallen ist über weite Bereiche konstant und von der Temperatur unbeeinflusst. Bei sehr tiefen Temperaturen sind die Gitterschwingungen eingefroren, die Elektronen werden nur noch am nicht perfekten Gitteraufbau, also an Störstellen gestreut (was sind die Störstellen in einem Metall? ). Der Widerstand wird temperaturunabhängig. Deshalb mündet die R(T )-Kurve bei T = 0 K in den endlichen Restwiderstand R0 . Beachten Sie die Information zum Ladungstransport in Metallen in der Grundlagen-Vertiefung auf der eLearning Seite des Anfängerpraktikums Bei Halbleitern liegt die Fermi-Energie im Gap zwischen Valenz- und Leitungsband. Das Gap ist zwar schmal (siehe Abb. 2 und Tab. 1), aber immer noch groß gegenüber der thermischen Energie der Elektronen bei Raumtemperatur (etwa 25 meV). Da die Energie der Elektronen jedoch statistisch verteilt ist, haben immer einige Elektronen genügend Energie, um -anschaulich formuliert- vom Valenzband ins Leitungsband zu gelangen. Für jedes Elektron, das ins Leitungsband gelangt, bleibt ein unbesetzter Energiezustand (Loch) im Valenzband zurück (Paarbildung). Beim Halbleiter tragen daher Löcher und Leitungselektronen zur Leitfähigkeit bei. Je höher die Temperatur ist, desto mehr Elektronen befinden sich im Leitungsband und desto mehr Löcher befinden sich im Valenzband. Die Anzahl der vorhandenen Ladungsträger - und somit die Eigenleitfähigkeit - ist daher bei Halbleitern stark temperaturabhängig. Material 0 K 300 K Diamant 5.4 5.46 - 6.4 Si 1.17 1.12 Ge 0.75 0.67 Se 1.74 InAs 0.43 0.355 GaAs 1.52 1.43 ZnO 3.436 3.37 Tabelle 1: Energiebandlücken ausgewählter Materialien in eV. Legt man an den Halbleiter eine äußere Spannung, so driften die Elektronen im Leitungs2 Leitungselektronen sollten nicht mit freien Elektronen verwechselt werden, welche komplett von Atomen losgelöst existieren (z.B. β − -Strahlung, Elektronenstrahlen in elektrischen Bauteilen,...). -5- LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes band in Richtung zur positiven Elektrode und die Löcher im Valenzband in die entgegengesetzte Richtung. Im Unterschied zu Metallen sind bei reinen Halbleitern stets Elektronenstrom und Löcherstrom am Leitungsvorgang beteiligt. Die Leitfähigkeit σ ergibt sich aus der Beweglichkeit der Leitungselektronen µ− und der der Löcher µ+ sowie der intrinsischen Ladungsträgerdichte ni (= Dichte der Leitungselektronen = Dichte der Löcher), wobei e0 hier die Elementarladung und kB die Boltzmannkonstante sind: σ = e 0 ni µ− + µ+ . Aus der Fermi-Dirac-Statistik folgt Eg BT − 2k σ ∝ ni ∝ e . (3) Man sollte darauf achten, dass die Gl. 3 nur eine grobe Näherung ist und dass die Energiebandlücke selbst temperaturabhängig ist, wie aus der Tab. 1 klar hervorgeht. Wie in jedem Festkörper nimmt die Elektronenbeweglichkeit mit steigender Temperatur ab (da die Atomrümpfe immer stärker schwingen). Bei hohen Temperaturen wird dieser Effekt durch die Zunahme der Ladungsträger bei Weitem überkompensiert. Die elektrische Leitfähigkeit von Halbleitern steigt dann exponentiell mit der Temperatur an. Die Temperaturabhängigkeit der Leitfähigkeit ist bei Halbleitern deutlich größer als bei Metallen. Bei Isolatoren ist das Gap sehr breit, wie man in Abb. 2 erkennen kann. Es können praktisch keine Elektronen vom Valenzband ins Leitungsband gelangen. 1.1.3 Temperaturkoeffizient metallischer Widerstände (PTC) Metalle haben einen positiven Temperaturkoeffizienten (PTC - positive temperature coefficient), ihr Widerstand steigt mit der Temperatur, man nennt sie auch Kaltleiter. Über weite Temperaturbereiche kann der temperaturabhängige Widerstand mit einem Polynom höherer Ordnung beschrieben werden. In mittleren Temperaturbereichen verläuft er näherungsweise linear: R(T ) = RT0 [1 + α(T − T0 )] -6- (4) LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes Formelzeichen Einheit R(T ) Ω RT0 Ω T K T0 K α K −1 Bezeichnung Widerstand bei der Temperatur T Ausgangs- bzw. Referenzwiderstand Temperatur Ausgangs- bzw. Referenztemperatur Temperaturkoeffizient Elektrische Material Leitfähigkeit σ (S m−1 × 106 ) Silber 62.89 Kupfer 59.77 Gold 42.55 Aluminium 37.66 Molybdän 19.20 Wolfram 17.69 Nickel 14.60 Eisen 10.29 Platin 9.48 Blei 4.76 Konstantan 2.0 Temperaturkoeffizient des spez. Widerstands α20 (K−1 × 10−3 ) 4.1 4.3 4.0 4.5 4.35 4.8 6.8 6.5 3.8 4.22 -0.035 Tabelle 2: Leitfähigkeit und Temperaturkoeffizient des spezifischen Widerstands einiger Werkstoffe bei 20◦ C. Tabelle 2 zeigt ausgewählte Parameter einiger Metalle und Legierungen. 1.1.4 Temperaturkoeffizient von Halbleitern (NTC) Reine Halbleiter haben bei hohen Temperaturen, d.h. Zimmertemperatur und höher, einen negativen Temperaturkoeffizienten (NTC - negative temperature coefficient), ihr Widerstand sinkt mit der Temperatur, man nennt sie auch Heißleiter. Der temperaturabhängige Widerstand bei hohen Temperaturen kann mit einer Exponentialfunktion beschrieben werden (vgl. Gl. 3). −b T1 − T1 R(T ) = RT0 e 0 (5) Nach Gl. 3 besteht zwischen dem Temperaturkoeffizienten b und der Lückenenergie Eg folgender Zusammenhang: -7- LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes b= Eg 2kB (6) Dieser Zusammenhang ist jedoch von vielen Parametern wie Gitterfehlstellen, Verunreinigungen etc. abhängig und kann daher nur als Abschätzung der Größenordnung verstanden werden. Formelzeichen Einheit R(T ) Ω RT0 Ω T K T0 K b K Eg J kB J/K Bezeichnung Widerstand bei der Temperatur T Ausgangs- bzw. Referenzwiderstand Temperatur Ausgangs- bzw. Referenztemperatur Temperaturkoeffizient Energielücke Boltzmannkonstante Als Lücken-Energie Eg wird bei Halbleitern jene (mittlere) Energiedifferenz bezeichnet, die notwendig ist, damit ein Elektron aus dem Valenzband einen Energiezustand im Leitungsband einnehmen kann (siehe Abb. 2). 1.2 Aufgabenstellung 1. Bestimmen Sie den elektrischen Widerstand R(T ) eines Halbleiters, eines Metalles und eines Elektrolyten in Abhängigkeit von der Temperatur zwischen Zimmertemperatur und 80◦ C. 2. Tragen Sie R(T ) des Metallwiderstandes mit Hilfe eines geeigneten Auswerteprogrammes wie z.B. QTIPlot grafisch auf und bestimmen Sie den Temperaturkoeffizienten α mittels eines Kurven-Fits (Regression). Wählen Sie dazu eine möglichst günstige grafische Auftragung. Um welches Metall könnte es sich handeln? 3. Führen Sie eine analoge Auswertung an den Messdaten des Halbleiters durch und bestimmen Sie die Breite der Bandlücke Eg des Halbleiters. Um welchen Halbleiter könnte es sich handeln? 4. Tragen Sie R(T ) des Elektrolyten mit Hilfe eines geeigneten Auswerteprogrammes wie z.B. QTIPlot grafisch auf und diskutieren Sie die Temperaturabhängigkeit. Verhält sich R(T ) so, wie man es aufgrund von Gleichung 2 erwarten kann? Wenn ja, bestimmen Sie die Aktivierungsenergie EA pro Mol des vorliegenden Elektrolyts. -8- LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes 1.3 Versuchsaufbau und Durchführung Abbildung 3: Schaltskizze zur Messung der temperaturabhängigen Widerstände sowie eines Elektrolyten Automatische Messung mit Cassy: Der Aufbau besteht aus zwei Schaltkreisen. Die in Abb. 3 oben dargestellte Schaltung dient zur Widerstandsmessung des Elektrolyten. Dieser benötigt eine Wechselspannung um Polarisationseffekte an den Elektroden zu vermeiden. Hier wird mit einer Spannung von ca. 11V gearbeitet. Diese Spannung wird an einem Netzgerät (siehe Abb. 4 , 1) abgenommen. In dem Schaltkreis werden zwei Messungen vorgenommen: Eine Spannungsmessung an einem bekannten Widerstand R0 = 2180Ω und eine Spannungsmessung direkt am Elektrolyten. Daraus kann mit den Kirchhoff’schen Gesetzen und dem Ohm’schen Gesetz der unbekannte Widerstand berechnet werden. Für die Messung mit Cassy benötigen Sie 2 Sensor-Cassys, die kaskadiert (zusammengesteckt sind). An den Eingängen B1 und B2 messen Sie diese beiden Spannungen. Achten Sie bei der Konfiguration der Spannungsmessung darauf, dass es sich um eine Wechselspannung handelt und dass die Messbereiche passen. Mit Hilfe der beiden Spannungen und dem bekannten Widerstand kann der Widerstand des Elektrolyten in Cassy Lab direkt berechnet werden. Dazu müssen Sie im Fenster „Einstellungen“ im „Rechner“ eine neue „Formel“ eingeben. Es empfiehlt sich, im Hinblick auf alle weiteren Messungen, für den Bereich der Widerstandsdarstellung 0-3000Ω und 2 Dezimalstellen zu wählen. -9- LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes Abbildung 4: Die wichtigsten Geräte für die Messung der temperaturabhängigen Widerstände: 1. 8V∼ Netzgerät, 2. Heizung, 3. Wasserbad mit (a) Rührwerk, (b) PTC, (c) NTC, (d) Elektrolyt, (e) Temperaturmesser Der zweite Stromkreis wird mit einer Gleichspannung von ungefähr 2V betrieben. Diese wird direkt an einem Sensor-Cassy abgenommen, wozu Sie die Spannungsquelle „S“ in Cassy Lab aktivieren müssen und ihren genauen Wert manuell einstellen (schwarzes Einstellrad am Sensor-Cassy). Leider ist es nicht möglich den momentanen Spannungswert gleich im Programm zu sehen, daher müssen Sie diesen extra messen, um ihn auf den gewünschten Wert einzustellen. Die Widerstände können wie in Abb. 3 bei bekannter Spannung mittels Strommessung an den Sensor-Cassy-Eingängen A1 und A2 in einer stromrichtigen Schaltung gemessen werden. Der Spannungsabfall an den Amperemetern wird aufgrund ihres geringen Innenwiderstandes vernachlässigt, sodass man mit der Netzspannung des Cassy-Moduls und der gemessenen Stromstärke die Widerstände berechnen kann. Auch hier müssen die Messungen in Cassy Lab richtig konfiguriert werden. Tipp: die Ströme, die fließen werden, sind so klein, dass die größtmögliche Auflösung notwendig ist. Geben Sie wieder die notwendigen Formeln ein, um die Widerstände von Cassy Lab automatisch berechnen zu lassen. Wenn Sie vollautomatisch messen wollen, müssen Sie noch den Temperatursensor aktivieren. Für zumindest einen der drei Widerstände müssen die Messparameter festgelegt werden (diese gelten dann für alle gemessenen und errechneten Größen). Es empfiehlt sich eine Messung pro Minute durchzuführen. Nachdem die Messung im Abkühlprozess durchgeführt wird, können Sie eine automatische Stopp-Bedingung einrichten, die die Messung bei der gewünschten Temperatur beendet. - 10 - LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes Bei „Darstellung“ (im Fenster „Einstellungen“) achten Sie darauf, dass nur die drei Widerstände gegen die Temperatur dargestellt werden. Für die genauere Handhabung von Cassy Lab 2 lesen Sie das Dokument „Erste Schritte mit Cassy Lab und ULAB“ auf der eLearning-Seite des Anfängerpraktikums. Temperaturregelung: Die drei zu bestimmenden Widerstände befinden sich allesamt in einem Wasserbad (destilliertes Wasser verwenden, ggf. Wasser nachfüllen). In Abb. 3 wird dieses schematisch durch das blaue Kästchen dargestellt. Das Wasser wird mit einem Magnetrührwerk (siehe Abb. 4 , 3a) durchgehend in Bewegung gehalten, um einen Temperaturgradienten innerhalb des Gefäßes so gut es geht zu vermeiden. Mittels regulierbarer Heizplatte (siehe Abb. 4 , 3e) wird das Wasser von Zimmertemperatur auf ca. 80◦ C erhitzt. Dazu stellen Sie den Temperaturregler auf einen mittleren Wert ein (z.B. 200◦ C), dann erwärmt sich das Wasser langsam genug, um die Messung während des Erwärmens durchführen zu können. Auswertung: Die Daten aus der Messwerttabelle in Cassy Lab können Sie mit Copy-Paste in jedes beliebige Datenauswertungsprogramm exportieren. Berechnet man den Widerstand eines PTC’s mittels Formel 4, kann dieser ein wenig variieren, je nachdem welche Referenztemperatur T0 gewählt wird. Daher wird bei Literaturangaben immer ein Referenzwert angeführt, um einen Vergleich zu ermöglichen. Tabelle 2 bezieht sich auf eine Referenztemperatur von 20◦ C. Aus diesem Grund sollten Sie für Ihre Auswertung T0 auf 20◦ C setzen, damit Sie Ihre Ergebnisse mit denen der Tabelle vergleichen können. Wenn Sie nun R(T ) gegen (T − T0 ) auftragen, ersparen Sie sich einerseits die Umrechnung auf Kelvin, da Temperaturdifferenzen in beiden Skalen ident sind, andererseits können Sie dann den Wert für den Temperaturkoeffizienten αT =20◦ C von dem Auswertungsprogramm berechnen lassen und diesen mit Tabelle 2 vergleichen. Auch die Lücken-Energie Eg des Heißleiters bestimmt man aus dem Anstieg einer linearen Funktion. Dazu müssen Sie die betreffende Gleichung 5 in folgende Form bringen: R(T ) 1 1 =b· +d f ( ) = ln T RT0 T (7) RT0 ist dabei ein (beliebiger) Referenzwert für den Widerstand, der bei der Referenztemperatur T0 auftritt3 . Ihre Daten können Sie in QTI-Plot schnell und einfach umrechnen. Beachten Sie hierzu die Erklärungen im Praktikumsleitfaden für Studierende. Um aus der 3 Die Division durch den Referenzwert ist notwendig, damit Sie auf der linken Seite der Gleichung den natürlichen Logarithmus von einer dimensionslosen Zahl bilden können. - 11 - LW10 1 Temperaturabhängigkeit des elektrischen Widerstandes Steigung b die Energielücke Eg zu bestimmen, ist es nützlich, den Wert der Boltzmannkonstanten kB in geeigneten Einheiten zu kennen: kB = 8.616 × 10−5 eV/K. Gehen Sie bei der Auswertung der Temperaturabhängigkeit des Elektrolyten analog vor wie beim NTC, für den Fall, dass ein exponentieller Zusammenhang vorliegt, denn dann ist die Viskosität der leitfähigkeitsbestimmende Faktor und es gilt R ∝ η. Da Sie eine wässrige Lösung im Experiment verwenden, entspricht die Platzwechselenergie EA ≈ EH , der Energie der Wasserstoffbrückenbindung. Für schwache Wasserstoffbrückenbindungen liegt 0kJ/mol < EH < 20kJ/mol. Vergleichen Sie mit Ihrem Ergebnis. 1.4 Hinweise zur Protokollierung und Fehlerrechnung Vergessen Sie die Interpretation der Daten nicht. Sie bestimmen hier Materialkonstanten: Dazu existieren Vergleichswerte in der Literatur. Um welche Materialien könnte es sich handeln? Welche Fehlerquellen beeinflussen Ihre Messungen? - 12 - LW10 2 Magnetische Hysteresekurve 2 Magnetische Hysteresekurve 2.1 Grundlagen 2.1.1 Magnetismus in Materie ~ beschrieben, welches als Magnetfeld, maMagnetfelder werden durch das Wirbelfeld B gnetische Induktion oder magnetische Flussdichte bezeichnet wird. Wirbelfeld deshalb, weil keine magnetischen Ladungen (Mono-Pole) existieren, mathematisch ausgedrückt: ~ = 0.4 div B Magnetfelder können durch elektrische Ströme erzeugt werden, sie sind aber auch Eigenschaften von Materie: Bereits um 1100 verwendeten chinesische Seefahrer Magnetnadeln zur Navigation von Schiffen. ~ 0 eine Magnetisierung M ~ , welche ein Jede Materie erfährt in einem äußeren Magnetfeld B ~ ~ „inneres“ Magnetfeld Bm verursacht. M kommt durch die Wechselwirkung des äußeren ~ 0 mit den magnetischen Momenten der Materie m Magnetfeldes B ~ m zustande. Das Modell, welches man hierzu als Vorstellungshilfe verwenden kann, ist jenes der atomaren Kreisströme, wie in Abb.5 illustriert. Abbildung 5: Modell atomarer Kreisströme, bei der die magnetischen Momente parallel zur Zylinderachse orientiert sind. Je nach Stromflussrichtung verstärken oder schwächen nun die magnetischen Momente der Materie das äußere Magnetfeld. ~ =B ~0 + B ~m = B ~ 0 + µ0 M ~ B 4 (8) ~ verwendet werden. Es Zur Beschreibung von Magnetfeldern kann auch die magnetische Feldstärke H gilt die Beziehung: B = µ0 H (im Vakuum). Man kann allerdings sämtliche magnetischen Phänomene ~ beschreiben, wie es in dieser Anleitung gemacht wird. auch allein mithilfe von B - 13 - LW10 2 Magnetische Hysteresekurve Formelzeichen Einheit ~ B T (Tesla) ~ T (Tesla) B0 ~ T (Tesla) Bm ~ A/m M µ0 = 1, 257 · 10−6 Bezeichnung Vs Am Gesamtmagnetfeld äußeres Magnetfeld Magnetfeld der magnetisierten Materie Magnetisierung magnetische Feldkonstante Wie kommen diese magnetischen Momente der Materie zu stande? Es sind quantenmechanische Effekte, welche die magnetischen Eigenschaften der einzelnen Atome begründen: Bahndrehimpuls der Elektronen, Spin der Elektronen und Kernspin 5 der jeweiligen Atome beeinflussen Richtung und Größe des magnetischen Moments. Der Bahndrehimpuls, dessen Name vom historischen Bohr’schen Atommodell6 herrührt, ergänzt sich mit dem Spin zum jeweiligen magnetischen Moment (Spin-Bahn-Kopplung). Nachdem in abgeschlossenen Elektronenschalen7 sich die Spins aller Elektronen gegenseitig aufheben, haben speziell Atome mit nicht abgeschlossenen Elektronenschalen auffallende magnetische Eigenschaften, da sie permanente magnetische Dipole besitzen. Die magnetische Suszeptibilität χ ist die wichtigste magnetische Kenngröße für Magnetismus in Materie. Es gilt folgender Zusammenhang: ~ =B ~ 0 + µ0 M ~ = µr B ~ 0 = (1 + χ)B ~0 B µr = B = (1 + χ) B0 (9) µr ist die relative Permeabilität und ist wie χ eine materialabhängige Größe. Mit Hilfe von χ lassen sich die 3 Hauptarten von Magnetismus in Materie unterscheiden (siehe auch Abb. 6: • Diamagnetismus M <0 − 10−4 < χ < −10−9 Diamagnetische Materialien führen zu einer leichten Abschwächung des äußeren Magnetfeldes. • Paramagnetismus M >0 10−6 < χ < 10−3 Paramagnetische Materialien bewirken eine leichte Verstärkung des äußeren Magnetfeldes. 5 Effekt kaum beeinflussend für makroskopische magnetische Eigenschaften Laut Bohr’schem Atommodell bewegen sich Elektronen auf diskreten Kreisbahnen um den Kern. Es ist zwar ein Meilenstein der Physikgeschichte, hat sich jedoch bereits in der ersten Hälfte des 20. Jahrhunderts eindeutig als „fachlich falsch“ erwiesen. 7 auch „Edelgaskonfiguration“ genannt 6 - 14 - LW10 2 Magnetische Hysteresekurve • Ferromagnetismus M >> 0 0, 3 < χ < 109 Ferromagnetische Materialien führen zu einer deutlichen Verstärkung des äußeren Magnetfeldes. Abbildung 6: Unterscheidung der Arten des Magnetismus anhand der Suszeptibilität χ 2.1.2 Diamagnetismus Die Atome diamagnetischer Materialien weisen keine permanenten magnetischen Momente auf. Erst in einem äußeren Magnetfeld werden magnetische Momente induziert. Mit der Lenz’schen Regel kann man sich vorstellen, dass in Diamagneten „Kreisströme“ induziert werden, die ihrer Ursache entgegenwirken, also das äußere Magnetfeld abschwächen. Dabei erfahren die diamagnetishe Stoffe auch eine Abstoßung (in Richtung geringerer Flussdich- - 15 - LW10 2 Magnetische Hysteresekurve Abbildung 7: a) Nicht ausgerichtete atomare magnetische Momente. b) Bereiche spontan ausgerichteter magnetischer Momente (Weiss’sche Bezirke). te). Diamagnetismus ist ein sehr schwacher Effekt, der eine Eigenschaft aller Stoffe ist, aber leicht von anderen Effekten überlagert werden kann. Diamagneten sind Elemente oder Verbindungen mit abgeschlossener Elektronenschale, wie z.B. Ag, Au, Cu, Bi, H2 , H2 O etc. Typ I-Supraleiter sind unterhalb der kritischen Temperatur ideale Diamagneten mit χ = −1. 2.1.3 Paramagnetismus Paramagnetische Stoffe besitzen permanente magnetische Momente, die durch ein äußeres Magnetfeld in Richtung des Feldes ausgerichtet werden können. Der Verstärkungseffekt des äußeren Magnetfeldes ist jedoch sehr klein. Paramagnetische Stoffe erfahren im Magnetfeld eine Anziehung (in Richtung höherer Flussdichte). Paramagneten sind etwa Atome oder mit einer ungeraden Zahl von Elektronen (der Gesamtspin kann in diesem Fall nicht null sein), freie Atome und Ionen mit einer teilweise gefüllten inneren Schale, z.B. bei Alkalimetallen (Li, Na, K,...), Seltenerden und Aktiniden aber auch Moleküle wie Sauerstoff. 2.1.4 Ferromagnetismus Ferromagnetismus tritt auf in Metallen auf, deren permanente magnetische Dipolmomente wechselwirken. Die permanenten magnetischen Dipole können sich (spontan) in die gleiche Richtung ausrichten. Die einzelnen Momente summieren sich und es bilden sich Regionen mit großen magnetischen Gesamtmomenten (siehe Abb. 7). Diese Regionen werden Weiss’sche Bezirke genannt und besitzen im magnetisierbaren Material unterschiedlich ausgrichtete Gesamtmomente (siehe Abb. 8), die sich in Summe ausgleichen. Die Weiss’schen Bezirke werden durch die sogenannten Bloch-Wände von einander getrennt. In der Bloch-Wand klappen die atomaren magnetischen Momente auf sehr engem Raum in jene Richtung um, in welcher die magnetischen Momente des angrenzenden Weiss’schen Bezirks orientiert sind. Die Illustration in Abb. 9 verdeutlicht es. - 16 - LW10 2 Magnetische Hysteresekurve Abbildung 8: Weiss’sche Bezirke: Schnitt durch ein ferromagnetisches Material. Farben (und Vektoren) kennzeichnen die unterschiedlichen räumlichen Ausrichtungen der magnetischen Momente. Die schwarzen Abgrenzungen stellen die Bloch-Wände dar. Abbildung 9: Bloch-Wände: Dünne Bereiche (≈ 30 nm), in welchen die atomaren Dipole ihre Ausrichtung ändern. - 17 - LW10 2 Magnetische Hysteresekurve Wird ein solcher (unmagnetisierter) ferromagnetischer Stoff mittels eines äußeren Magnetfeldes magnetisiert, so werden die Ausrichtungen der magnetischen Momente der Weiß’schen Bezirke beeinflusst und verändert. Die Blochwände verschieben sich und es werden jene Weiß’schen Bezirke dadurch vergrößert, deren magnetisches Moment am ehesten zum äußeren Magnetfeld parallel verläuft. Abb. 10 veranschaulicht diese Vorgänge. Abbildung 10: Prozesse bei der Magnetisierung M eines Ferromagneten durch ein äußeres Magnetfeld B0 , dessen Richtung vom Pfeil in (d) dargestellt ist. a) Ausgangszustand: Das äußere Magnetfeld B0 = 0. Die Magnetisierung M = 0. Die magnetischen Momente im Material heben einander auf. b) → c) Wandverschiebungen: Wird das äußere Magnetfeld B0 angelegt (von S - links unten nach N - rechts oben) und erhöht, so kommt es zu Blochwand-Verschiebungen. Man unterscheidet: 90◦ -reversible und 180◦ -irreversible Wandverschiebungen8 . d) Drehprozesse bis zur Sättigung: Sind alle Weiss’schen Bezirke parallel ausgerichtet, so erfolgt die letzte mögliche Ausrichtung parallel zum äußeren Magnetfeld durch Drehprozesse der magnetischen Momente. Dann ist die Sättigungsmagnetisierung MS erreicht. Das resultierende Magnetfeld kann nun nicht mehr verstärkt werden. Die Magnetisierung von ferromagnetischer Materie ist also abhängig von Größe und Ausrichtung des äußeren Magnetfeldes. Es handelt sich hierbei nicht um einen einfachen Zusammenhang: M (B0 ) ist keine eindeutige mathematische Funktion. Es ist vielmehr ein Zyklus, der je nachdem, von wo aus er durchlaufen wird, einen unterschiedlichen Verlauf nimmt. Dieser Zyklus wird Hysteresekurve oder Hystereseschleife genannt und man kann an ihr wichtige Kenngrößen ferromagnetischer Werkstoffe ablesen (Abb. 11). 8 irreversibel bedeutet hier, dass sich diese Wandverschiebungen ohne ein externes Magnetfeld, welches in die Gegenrichtung ausgerichtet ist, nicht von selber rückgängig machen können - 18 - LW10 2 Magnetische Hysteresekurve Abbildung 11: Hysteresekurve eines Ferromagneten Geht man von einem unmagnetisierten Zustand aus, so wie auch schon im vergangenen Beispiel, und erhöht man das äußere Magnetfeld B0 von 0 in positive B0 -Werte, so wird die Materie magnetisiert und man durchläuft die beschriebene Neukurve. Im Material selbst finden dabei jene Prozesse statt, die anhand von Abb. 10 beschrieben wurden. Ist der Sättigungspunkt erreicht und man vermindert nun wieder das äußere Magnetfeld B0 bis auf B0 = 0, so kehren sich alle reversiblen Prozesse um. Die „irreversiblen“ jedoch nicht. Sie sind für einen verbleibenden Restmagnetismus MR (auch Remanenz genannt) verantwortlich. Die Hystereseschleife durchläuft dabei die oberste Kurve vom Sättigungspunkt im ersten Quadranten bis zum Schnittpunkt mit der M-Achse. Wird nun ein äußeres Magnetfeld in Gegenrichtung angelegt und erhöht, so werden die „irreversiblen“ Prozesse der vorhergegangenen Magnetisierung aufgehoben, sobald das dafür notwendige B0 -Feld aufgebaut ist. Der Betrag des entgegengesetzten Magnetfeldes, der für die Aufhebung der Remanenz notwendig ist, wird BC oder Koerzitivfeld genannt. Wird nun das äußere Magnetfeld in negative B0 -Richtung weiter verstärkt wiederholen sich die Prozesse der Magnetisierung wie oben beschrieben bis zum entgegengesetzten Sättigungspunkt. Ist der Sättigungspunkt erreicht und man vermindert nun wieder das äußere Magnetfeld B0 von −BS → 0, so kehren sich alle reversiblen Prozesse um. Es bleibt wieder ein Restmagnetismus −MR . Die Hystereseschleife durchläuft dabei die unterste Kurve vom negativen Sättigungspunkt im dritten Quadranten bis zum Schnittpunkt mit der M-Achse. - 19 - LW10 2 Magnetische Hysteresekurve Wird nun ein äußeres Magnetfeld in ursprünglicher Richtung angelegt und erhöht, so werden die „irreversiblen“ Prozesse der vorhergegangenen Magnetisierung aufgehoben, sobald das B0 -Feld den positiven BC -Wert erreicht. Wird das äußere Magnetfeld in positive B0 Richtung weiter verstärkt wiederholen sich die Prozesse der Magnetisierung (wie oben beschrieben) bis zum Sättigungspunkt. Die Hystereseschleife durchläuft dabei die unterste Kurve vom Schnittpunkt mit der B0 -Achse (bei +BC ) im ersten Quadranten bis zum positiven Sättigungspunkt. Bei einem äußeren Magnetfeld B0 (t), das von einem wechselstrombetriebenen Elektromagneten erzeugt wird wiederholt sich dieser Zyklus in der Wechselstromfrequenz. Im technischen Gebrauch findet man so eine Situation z.B. in jedem Transformator. Grenzen des Ferromagnetismus: Die Suszeptibilität χ ist stark temperaturabhängig. Oberhalb der sogenannten Curietemperatur TC , weist jeder Ferromagnet ein paramagnetisches Verhalten auf und χ folgt dem Curie-Weiss-Gesetz (mit der Curie-Weiss-Konstante C ): χ= C T − TC für alle T > TC (10) Kenngrößen ferromagnetischer Werkstoffe: Ein ferromagnetischen Werkstoff wird durch die Remanenz, das Koerzitivfeld zur Aufhebung der Remanenz und die Energie für das Durchlaufen eines kompletten Magnetisierungszyklus (von einem Sättigungspunkt zum entgegengesetzten und wieder zurück) charakterisiert. Diese Ummagnetisierungsenergie EU (J) pro Volumseinheit (m3 ) ergibt sich aus der Fläche, welche von der Hystereseschleife begrenzt wird. Überprüfen Sie die Einheiten! Anhand dieser Eigenschaften unterscheidet man hartmagnetische und weichmagnetische Werkstoffe. Abb.12 gibt dazu einen Überblick. - 20 - LW10 2 Magnetische Hysteresekurve Abbildung 12: Einteilung ferromagnetischer Werkstoffe in Weich- und Hartmagneten. 2.1.5 Ferri- und Antiferromagnetismus Neben dem technisch bedeutsamen Ferromagnetismus existieren noch zwei weitere (Sub-) Arten von Magnetismus, die sich durch die Existenz permanenter atomarer magnetischer Momente und durch die spontane Selbstausrichtung derselben auszeichnen: Ferri- und Antiferromagnetismus. Abbildung 13: Ausrichtung der magnetischen Momente bei Ferro- Antiferro- und Ferrimagnetismus Abb. 13 zeigt bereits sehr deutlich den Unterschied zum Ferromagnetismus. Während bei diesem die spontane Selbstausrichtung der magnetischen Momente in ein und der selben Region stets parallel erfolgt, so bildet sie sich beim Antiferro- sowie beim Ferrimagnetismus - 21 - LW10 2 Magnetische Hysteresekurve stets antiparallel aus. Während der Antiferromagnetismus -auf Grund der gleichen Größe der entgegengesetzten magnetischen Momente- Suszeptibilitäten in der Größenordnung von Paramagneten aufweist (und sich über weite Temperaturbereiche auch ähnlich verhält), verhält sich der Ferrimagnet wie ein „schwacher“ Ferromagnetischer Werkstoff (vgl. Abb. 6). Über die Arten von Magnetismus in Materie und deren Verhalten kann hier nicht weiter in die Tiefe gegangen werden. Bitte beachten Sie hierzu die Literaturhinweise am Ende des Textes. 2.2 Aufgabenstellung 1. Nehmen Sie die Hysteresekurve des Eisenkerns eines Transformators mit Hilfe von CASSY auf. 2. Bestimmen Sie das Koerzitivfeld BC , die Remanenz MR und die Ummagnetisierungsenergie pro Volumseinheit Em / V sowie deren Unsicherheit. 2.3 Versuchsaufbau und Durchführung Messprinzip: Im Experiment messen Sie die Magnetisierung eines ferromagnetischen Transformatorkerns. Die Schaltung ist in Abb. 14 skizziert. In der Primärspule wird das äußere Magnetfeld erzeugt, welches den Spulenkern magnetisiert. Das Magnetfeld Bm des Kerns induziert in der Sekundärspule eine seiner zeitlichen Änderung proportionale Spannung (Induktionsgesetz). Abbildung 14: Messprinzip zur Aufzeichnung der Hysteresekurve Der Strom Ip (t) durch die Primärspule erzeugt das äußere Magnetfeld B0 (t). n1 B0 (t) = µ0 · · Ip (t) l - 22 - (11) LW10 2 Magnetische Hysteresekurve Formelzeichen Einheit n1 1 l m Ip A µ0 = 1, 257 · 10−6 Vs Am Bezeichnung Windungsanzahl der Primärspule Länge der Primärspule Primärstrom magnetische Feldkonstante Aus dem Magnetfeld Bm (t) kann die Magnetisierung des Eisenkerns M (t) direkt ermittelt werden. Die Spannung US (t) an der Sekundärspule des Transformators ist der zeitlichen Änderung des resultierenden Magnetfeldes B(t) = B0 (t) + Bm (t) proportional. Da im vorliegenden Fall (ferromagnetische Werkstoffe) B0 << Bm wird B(t) = Bm (t) angesetzt. Es gilt (das Faraday’sche Induktionsgesetz): US (t) = n2 · dBm (t) dΦ(t) = n2 · A · dt dt (12) daraus folgt: Z 1 US (t)dt = n2 · A · Bm (t) bzw. Bm (t) = n2 · A Z US (t)dt (13) und mit Bm (t) = M (t) · µ0 gilt: 1 M (t) = n2 · A · µ0 Formelzeichen Einheit Φ Wb US V n2 1 A m2 Z US (t)dt (14) Bezeichnung magnetischer Fluss (induzierte) Spannung an der Sekundärspule Windungsanzahl der Sekundärspule Querschnittsfläche des Spulenkerns Um aus dem Spannungssignal US (t) ein Uy (t) zu erhalten, welches zu Bm (t) direkt proportional ist, muss also US (t)über die Zeit t integriert werden. Diese Integration erfolgt elektrotechnisch mit einem RC-Glied (oder auch Integrierglied bzw. Tiefpass(filter)): Z Z 1 Uy (t) = · US (t)dt bzw. US (t)dt = R · C · Uy (t) R·C eingesetzt in Gl. 14 ergibt sich M (t) zu: R·C M (t) = · Uy (t) n2 · A · µ0 (15) (16) Die Abb. 15 zeigt die Integration der Sekundärspannung nach der Zeit. Die Integration ergibt sich aus dem Lade- und Entladeverhalten des Kondensators in der RC-Serienschaltung. - 23 - LW10 2 Magnetische Hysteresekurve Abbildung 15: Wirkungsweise des Integriergliedes Warnhinweis: • Sie legen primärseitig Netzwechselspannung an Uef f =230 V. Bevor nicht alle Anschlüsse des fest vertrahteten Transformatorgehäuses richtig verkabelt sind, darf der Netzstecker nicht eingesteckt werden (kontrollieren lassen!). • Für Schulen, Schülerversuche etc. gelten generell folgende Faustregeln: Beim Arbeiten mit Spannungen > 40 V gilt besondere Vorsicht! Ein Stromstoß mit > 0,050 A, der über das Herz fließt kann bereits tödlich sein! Durchführung: Bauen Sie den Messanordnung laut Schaltskizze in Abb. 14 auf. Die Messung von UP erfolgt mit einem Multimeter. IP und Uy werden direkt mit dem Sensor-Cassy gemessen. Messen Sie zuerst die Effektivwerte von IP und Uy , um die optimalen Messbereiche wählen zu können. Ist das erfolgt, können Sie sich über die Eingabe von Formeln in Cassy Lab die beiden zeitabhängigen Messgrößen B0 (t) und M (t) für die Darstellung der Hystereseschleife bestimmen lassen. Die Umrechnungsfaktoren berechnen Sie mit Hilfe der technischen Daten des Transformators: - 24 - LW10 3 Empfohlene Zusatzliteratur Technische Daten n1 Windungszahl Primärspule l Länge Primärspule n2 Windungszahl Sekundärspule A Querschnittsfläche des Kernes R Widerstand des Integriergliedes C Kapazität des Integriergliedes RV Vorwiderstand 2147 (27, 0 ± 0, 5) mm 126 (441 ± 22) mm2 330 kΩ 1 µF 47 Ω Wählen Sie im Menüpunkt „Darstellung“ die richtige Achsenbelegung. Messparameter und Auswertung: Bei 50 Hz Netzwechselstromfrequenz durchläuft der Transformator pro Sekunde 50 Hysteresezyklen. Wählen Sie die Messdauer geringfügig länger als eine Zyklusdauer und wählen Sie eine adäquate Anzahl von Messpunkten, um den Verlauf der Hysterese angemessen darstellen zu können. Die Bestimmung von MR und BC kann über Differenzmessungen direkt in Cassy Lab erfolgen. Die Bestimmung der Fläche erfolgt ebenfalls in Cassy mit Hilfe der Funktion „Peakfläche berechnen“. Dazu müssen Sie jenen Überlappungsbereich finden, in dem der Datensatz des zweiten Zyklus beginnt. Dort müssen sie nur mehr zwei benachbarte Punkte (einen aus dem ersten und einen aus dem zweiten Zyklus) markieren, um die gesamte von der Hysterese umschlossene Fläche auszuwählen. Auf der eLearning-Seite des Anfängerpraktikums finden Sie „Erste Schritte im Umgang mit ULAB und CASSY“ und bei Bedarf die vollständige Anleitung der Messsoft- und Hardware. 3 Empfohlene Zusatzliteratur • Bergmann, Schäfer; Elektromagnetismus; DeGruyter - 25 -