coulombsche auslenkung
Werbung

Aufgabensammlung zur Klassischen Theoretischen Physik I – Mechanik
Informationen zur mündlichen Modulabschlussprüfung und eine kurze Zusammenfassung der Themen der
Vorlesung finden Sie unter http://www.tp2.rub.de/lehre/ss16/ktp1/index.shtml.
Inhaltsverzeichnis
1 Allgemeine und Newtonsche Mechanik
1.1 Coulomb-Potential [H02] . . . . . . . . . . . . . . . . .
1.2 Senkrechter Wurf mit Reibung [A05] . . . . . . . . . .
1.3 Raketengleichung [H05] . . . . . . . . . . . . . . . . .
1.4 Modifiziertes Newtonsches Gravitationspotential [H05]
1.5 Modifiziertes Newtonsches Gravitationspotential – Teil
1.6 Periheldrehung [H06] . . . . . . . . . . . . . . . . . . .
1.7 Runge-Lenz Vektor [A07] . . . . . . . . . . . . . . . .
1.8 Präzession des Foucaultschen Pendels [A08] . . . . . .
1.9 Freier Fall mit Rotation [H08] . . . . . . . . . . . . . .
.
.
.
.
2
.
.
.
.
. . . .
. . . .
. . . .
. . . .
[H06]
. . . .
. . . .
. . . .
. . . .
2 Lagrange-Formalismus 2. Art
2.1 Der schnellste Weg [A07] . . . . . . . . . . . . . . . . . . . . .
2.2 Das Brechungsgesetz [A07] . . . . . . . . . . . . . . . . . . . .
2.3 Der Harmonischer Oszillator und das Noether-Theorem [H08]
2.4 Schiefe Ebene [H09] . . . . . . . . . . . . . . . . . . . . . . .
2.5 Zwei Massen und eine Tischplatte [H09] . . . . . . . . . . . .
2.6 Erzwungene Schwingung [H10] . . . . . . . . . . . . . . . . .
2.7 Drei gekoppelte schwingende Massen [H10] . . . . . . . . . .
2.8 Gekoppelte Pendel [A10] . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
2
2
2
3
3
4
4
6
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
8
8
9
9
9
10
10
3 Hamilton-Formalismus
11
3.1 Hamiltonsche Mechanik [H12] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2 Drei gekoppelte schwingende Massen im Hamiltonformalismus [H12] . . . . . . . . . . . . . . 11
4 Streuung
12
4.1 Streuung um kleine Winkel [H11] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1 Allgemeine und Newtonsche Mechanik
1.1 Coulomb-Potential [H02]
T
Das elektrische Potential V (~r) am Ort ~r = (r1 , r2 , r3 ) einer Punktladung Q, die sich im Ursprung des
Koordinatensystems befindet, ist gegeben durch das Coulomb-Potential
V (r1 , r2 , r3 ) =
Q
Q
=√
.
|~r|
rk rk
In dieser Notation gilt aufgrund der Einsteinschen Summenkonvention rk rk =
ˆ
(1)
P3
k=1 rk rk .
~ .
1. Berechnen Sie die auf eine Probeladung q resultierende Kraft F~ = −q ∇V
2. Wirkt eine Kraft F~ auf eine Probelandung der Masse m, wird diese gemäß m~a = F~ beschleunigt. Ist
die resultierende Kraft zwischen zwei geladenen Teilchen mit q = Q = (−e) anziehend oder abstoßend?
Begründen Sie.
~ · ∇V
~
3. Berechnen Sie die Divergenz des Kraftfeldes ∇
.
1.2 Senkrechter Wurf mit Reibung [A05]
Ein Körper der Masse m wird mit einer Anfangsgeschwindigkeit v0 von der Höhe z = 0 aus vertikal nach
oben geworfen. Dabei erfährt er eine Luftreibung |FR | = k ż 2 mit k > 0.
Zum Zeitpunkt t1 erreicht er die maximale Steighöhe H = z(t1 ).
1. Bestimmen Sie die Geschwindigkeit des Körpers ż(t) während seines Aufstiegs für 0 < t < t1 .
2. Bestimmen Sie den Zeitpunkt t1 und die Steighöhe H. Tipp: 1/ cos2 (x) = 1 + tan2 (x)
Anschließend fällt der Körper wieder und erreicht den Boden zum Zeitpunkt t2 .
1. Bestimmen Sie die Geschwindigkeit des Körpers ż(t) während seines Abstiegs für t1 < t.
2. Bestimmen Sie die Zeitspanne t2 − t1 bis zu seinem Auftreffen auf dem Boden. Wie hoch ist seine
Endgeschwindigkeit ż(t2 )? Tipp: 1/cosh2 (x) = 1 − tanh2 (x).
1.3 Raketengleichung [H05]
Eine Rakete der Anfangsmasse m0 startet senkrecht von der Erdoberfläche. Pro Zeiteinheit stößt sie die
Gasmenge α (Einheit: Masse/Zeit) mit der Geschwindigkeit vg entgegengesetzt zur Flugrichtung aus.
1. Wie lautet die Masse der Rakete m(t) als Funktion der Zeit t? Stellen Sie eine Differentialgleichung
für m(t) auf und lösen Sie diese.
2. Aufgrund der Impulserhaltung trägt das abgestoßene Gas zur Beschleunigung der Rakete bei. Geben
Sie eine Gleichung für die Änderung des Impulses dp in der infinitesimalen Zeitspanne dt an.
3. Beweisen Sie unter Verwendung der vorangegangenen Teilergebnisse, dass die Geschwindigkeit der
Rakete v(t) der Differentialgleichung
v̇(t) = −g +
1
α
m0
vg
− mα0 t
(2)
genügt. Beachten Sie dabei, dass sowohl Masse als auch Geschwindigkeit der Rakete zeitlichen Änderungen
unterliegen. Berücksichtigen Sie auch die Erdanziehungskraft Fg = −m(t)g.
4. Lösen Sie die Differentialgleichung (2) mit einem Separationsansatz und schreiben Sie das Ergebnis in
Abhängigkeit der Größen m0 , m(t) und vg auf.
1.4 Modifiziertes Newtonsches Gravitationspotential [H05]
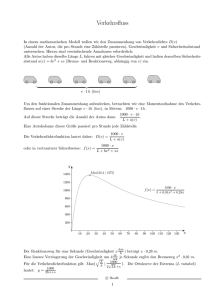
Aus der Vorlesung ist bekannt, dass die Bahnkurve ϕ(r) eines Teilchens im Zentralkraftfeld aus
L
ϕ(r) − ϕ(r0 ) = √
2m
Zr
r0
1
r02
p
E − Ueff (r0 )
dr0
bestimmt werden kann. Das effektive Potential ist definiert als Ueff (r) = V (r) +
das modifizierte Gravitationspotential
γ
V (r) = − 2 .
r
(3)
L2
2mr 2 .
Betrachten Sie nun
1. Zeigen Sie explizit, ob der Drehimpuls L und die Energie E in diesem Fall erhalten sind.
2. Untersuchen Sie, ob es für das modifizierte Gravitationspotential geschlossene Bahnkurven im Bereich
E < 0 gibt. Führen Sie dazu das Integral in Gleichung (4) mit der Substitution x = 1/r0 und
r
Z
a
dx
1
√
= √ arcosh
x , a, c > 0
c
a
ax2 − c
aus. Finden Sie einen Ausdruck für
den Verlauf der Bahnkurve ab.
1
r
in Abhängigkeit von ϕ und leiten Sie daraus eine Aussage über
1.5 Modifiziertes Newtonsches Gravitationspotential – Teil 2 [H06]
Vom letzten Hausaufgabenzettel ist bekannt, dass die Bahnkurve ϕ(r) eines Teilchens im Zentralkraftfeld
aus
Zr
1
L
p
dr0
(4)
ϕ(r) − ϕ(r0 ) = √
2m
r02 E − Ueff (r0 )
r0
bestimmt werden kann. Das effektive Potential war definiert als Ueff (r) = V (r) +
modifizierte Newtonsche Gravitationspotential
V (r) = −
L2
2mr 2 .
Wir betrachten das
γ
r2
erneut.
Untersuchen Sie, ob es für das modifizierte Gravitationspotential geschlossene Bahnkurven im Bereich E > 0
gibt. Gehen Sie wie bei der letzten Hausaufgabe vor: Finden Sie einen Ausdruck für 1r in Abhängigkeit von
ϕ und leiten Sie daraus eine Aussage über den Verlauf der Bahnkurve ab.
Tipp: Die nötigen Stammfunktionen kennen Sie aus Anwesenheitsübung 6. Achten Sie darauf, alle Fälle zu
behandeln!
1.6 Periheldrehung [H06]
Eine kleine Störung δU des Newtonschen Gravitationspotentials bewirkt, dass die Bahnkurve eines sich im
Potential bewegenden Körpers bei endlicher Bewegung nicht mehr geschlossen ist. Die Lage des Radiusvektors
- und damit die Lage des Perihels, des zentrumsnächsten Punktes - ändert sich um einen Betrag δϕ. In der
Vorlesung wurde gezeigt, dass für den bei der Bewegung vom Perihel (rmin ) zum Aphel (rmax ) überstrichenen
Winkel ∆ϕ gilt
rZmax
rZmax
L
dr
dr
L
q
p
∆ϕ = √
(5)
=
2
2
2
r
2m
r E − Ueff (r)
2m (E − U (r)) − Lr2
rmin
rmin
Die Verschiebung des Perihels bei einem Umlauf ist daher gegeben durch
rZmax
ϕP =
rmin
2L
dr
q
r2 2m (E − U (r)) −
(6)
L2
r2
1. Zeigen Sie, dass gilt:
rZmaxr
∂
ϕP = −2
∂L
2m (E − U (r)) −
L2
dr
r2
(7)
rmin
2. Setzen Sie nun U = U0 + δU an, wobei U0 das ungestörte Gravitationspotential und δU eine kleine
Störung ist. Entwickeln Sie die Wurzel aus 7 mithilfe der Relation
√
a+x≈
√
1
a + √ x,
2 a
für x a
und zeigen Sie, dass der Term nullter Ordnung gerade ϕP = 2π ergibt und die Korrektur erster Ordnung
gegeben ist durch
∂
δϕP =
∂L
rZmax
2mδU dr
q
rmin
2m (E − U (r)) −
L2
r2
∂ 2m
=
∂L L
Zπ
r2 δU dϕ
0
Verwenden Sie hierfür Ihre Kenntnis der ungestörten Bewegung (dr=?).
3. Berechnen Sie die Winkeländerung für die Störpotentiale δU1 =
β
r2
und δU2 =
γ
r3 .
1.7 Runge-Lenz Vektor [A07]
~
Für ein Potential der Form V = −α/r (Keplerproblem) ist neben der Energie E und dem Drehimpuls L
auch der Runge-Lenz Vektor
1
~ − ~r
~ε ≡ ~r˙ × L
α
r
eine Erhaltungsgröße.
1. Zeigen Sie, dass aus der Bewegungsgleichung des Keplerproblems
m~r¨ = −α
~r
r3
die Erhaltung von ~ε folgt.
Bilden Sie dazu auf beiden Seiten der Bewegungsgleichung das Kreuzprodukt mit dem Drehimpuls.
d
Nach einigen Umformungen erhalten Sie die gewünschte Aussage dt
~ε = 0.
2. Die Länge des Runge-Lenz Vektors kann durch den Drehimpuls und die Energie ausgedrückt werden.
Zeigen Sie, dass sich für ~ε2 gerade das Quadrat der numerischen Exzentrizität ergibt,
~ε2 = 1 +
2L2
E.
mα2
3. Leiten Sie aus dem Runge-Lenz Vektor die Bahnkurve des Keplerproblems her. Wählen Sie das Koordinatensystem so, dass ~ε = |~ε|êx . Dann bilden Sie in Zylinderkoordinaten das Skalarprodukt ~ε · ~r und
erhalten eine Ellipsengleichung der Form
r(ϕ) =
P
1 + |~ε| cos ϕ
mit Halbparameter P und numerischer Exzentrizität ε = |~ε|. Was ergibt sich für den Halbparameter?
1.8 Präzession des Foucaultschen Pendels [A08]
Im Jahr 1851 hat der französische Physiker Jean Bernard Léon Foucault ein anschauliches Experiment zum
Nachweis der (damals schon bekannten) Erdrotation entworfen. Es beschreibt ein Pendel, das den Verlauf
seiner Schwingung auf dem Boden markiert. Dabei ist zu erkennen, dass die Schwingungsebene mit der
Zeit rotiert. In dieser Aufgabe berechnen wir die Änderung der Schwingungsebene, hervorgerufen durch die
Rotation der Erde.
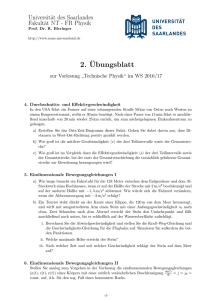
Das Foucaultsche Pendel befinde sich im Punkt P auf der Oberfläche eine kugelförmigen Erde, die sich
mit konstanter Winkelgeschwindigkeit ω
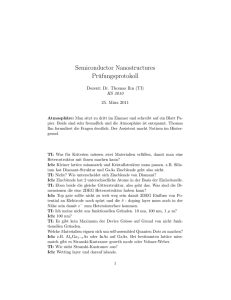
~ dreht (siehe Abbildung 1). Das Koordinatensystem {~ex , ~ey , ~ez } mit
Ursprung P rotiere mit der Erde (siehe Abbildung 2).
Für die Bearbeitung des Problems ist es sinnvoll, zu den lokalen Kugelkoordinaten {~er , ~eθ , ~eϕ } (siehe Abbildung 2) überzugehen. Dabei ist der Ursprung dieses Koordinatensystems der Stützpunkt des Pendels, θ
seine Auslenkung und ϕ der Winkel der Schwingungsebene.
Abbildung 1: Skizze der Erde als Kugel mit Rotationsvektor ω
~ . Das Pendel befinde sich im Punkt P in einem
sich mitbewegenden Koordinatensystem {~ex , ~ey , ~ez }.
1. Wie lautet der Ortsvektor ~r der Pendelmasse in den Kugelkoordinaten {~er , ~eθ , ~eϕ }?
2. Stellen sie die normierten Einheitsvektoren {~er , ~eθ , ~eϕ } in der Basis {~ex , ~ey , ~ez } dar.
3. Berechnen Sie ~r˙ in der Basis {~er , ~eθ , ~eϕ }.
4. Berechnen Sie ~r¨ in der Basis {~er , ~eθ , ~eϕ }. Hinweis: Lassen Sie ~e˙ ϕ unverändert stehen.
Aus der Vorlesung ist bekannt, dass die Bewegung einer Masse m in einem Nicht-Inertialsystem durch
m~r¨ = −
∂U
−m ω
~˙ × ~r − 2m ω
~ × ~r˙ − m (~
ω × (~
ω × ~r))
∂~r
(8)
gegeben ist. Im Folgenden vernachlässigen wir den letzten Summanden (Zentrifugalkraft) in (8).
5. Welche der verbleibenden Summanden in (8) sind bezogen auf das betrachtete Problem konstant Null?
6. Welche Komponenten der Erdanziehungskraft F~g = − ∂U
er , ~eθ , ~eϕ } sind immer Null?
∂~
r zur Basis {~
Die Änderung der Rotationsebene ϕ̇ kann aus Gleichung (8) zu
ϕ̇ = ω sin(ψ)
(9)
bestimmt werden, indem man lediglich die ~eϕ -Komponente der Bewegungsgleichung untersucht.
7. Warum benötigt man zur Herleitung nur die ~eϕ -Komponente der Bewegungsgleichung?
8. Leiten Sie (9) aus (8) her, indem Sie auf beiden Seiten mit ~eϕ multiplizieren und alle vorangegangenen
Teilergebnisse nutzen. Hinweis: Nutzen Sie außerdem ω
~ · ~er ≈ −ω sin(ψ) (vergleiche Abbildung 1) und
nähern Sie für kleine Auslenkungen θ, sodass sin(θ) ≈ θ und cos(θ) ≈ 1.
9. Wie hoch ist die Periode der Präzession in Bochum (ψ ≈ 51, 5◦ )?
Abbildung 2: Skizze des Pendels der Länge l im bewegten Koordinatensystem mit Ursprung P .
1.9 Freier Fall mit Rotation [H08]
Im Folgenden wollen wir den freien Fall eines Körpers auf der Erde unter Berücksichtigung der Eigenrotation
betrachten.
1. Zeigen Sie, dass der Betrag der Winkelgeschwindigkeit der Erdrotation durch
|~
ω | = ω ≈ 7, 3 · 10−5
1
s
gegeben ist. Stellen Sie den Vektor ω
~ durch ω und ψ dar. Was gilt für ω
~˙ ?
In der Vorlesung wurde gezeigt, dass die Bewegungsgleichungen in einem rotierenden Koordinatensystem
gegeben sind durch (Achtung: Zur Übersichtlichkeit werden die Striche im Folgenden fortgelassen)
~ ~r U − m ω
m~r¨ = −∇
~˙ × ~r − 2m ω
~ × ~r˙ − m ω
~ × (~
ω × ~r) .
Der Potentialterm ist dabei für kleine Bewegungen an der Erdoberfläche gegeben durch
~ ~r U = −mgêr .
−∇
(10)
Ausdruck (10) lässt sich noch vereinfachen, indem die Zentrifugalkraft mit dem Potentialterm zusammengezogen wird: Für ~r ≈ const. ist die Zentrifugalkraft Fz = m ω
~ × (~
ω × ~r) nahezu konstant und vergleichsweise
klein. Die Richtung der Zentrifugalkraft ist radial nach außen gerichtet (senkrecht zu ω
~ und zur x-Achse),
daher ändert sich, wenn man die Zentrifugalkraft mit der Erdanziehungskraft zusammenzieht, leicht deren
Richtung und zeigt nicht mehr genau zum Erdmittelpunkt. Allerdings ist gerade durch die Zentrifugalkraft
die Erde leicht abgeflacht (am dicksten ist sie am Äquator), sodass die Summe von Erdanziehungskraft und
Zentrifugalkraft wieder senkrecht auf der Erdoberfläche steht. Daher lassen sich die Bewegungsgleichungen
im Folgenden zu
m~r¨ = −mgeff êz + 2m ~r˙ × ω
~
(11)
vereinfachen (dies müssen Sie nicht zeigen).
2. Folgern Sie aus (11), dass sich die Bewegungsgleichungen komponentenweise schreiben lassen als
ẍ = 2ω ẏ sin ψ − 2ω ż cos ψ
ÿ = −2ω ẋ sin ψ
z̈ = −geff + 2ω ẋ cos ψ.
Betrachten wir nun die Anfangsbedingungen
ẋ(0) = ẏ(0) = ż(0) = 0
x(0) = y(0) = 0,
z(0) = h.
3. Nehmen Sie an dass ω 1 und ẋ 1 und zeigen Sie, dass damit gilt:
y(t) = 0
1
z(t) = h − geff t2
2
1
m
x(t) = ωgeff cos ψt3 ≈ 10−4 3 t3
3
s
In welche Himmelsrichtung wird ein fallender Körper abgelenkt? Welche Fallzeit ergibt sich für eine
Fallhöhe von 125 m und welche Ablenkung ergibt sich?
Wählen Sie für die Rechnungen die geographische Breite ψ = 65◦ . Es genügt, hier mit der Näherung
geff ≈ g zu rechnen. Mithilfe eines ähnlichen Experimentes konnte Galileo Galilei die Corioliskraft und
damit die Erddrehung messen.
2 Lagrange-Formalismus 2. Art
2.1 Der schnellste Weg [A07]
In der Vorlesung haben wir durch Optimierung eines Längenfunktionals gezeigt, dass die kürzeste Verbindung
zwischen zwei Punkten eine Gerade ist. In dieser Aufgabe wollen wir die schnellste Verbindung zwischen zwei
Punkten bestimmen.
Wir betrachten das in Abbildung 3 skizzierte Problem. Wir suchen die schnellste Verbindung von A nach B,
wobei in der unteren Halbebene die Geschwindigkeit v1 und in der oberen v2 erreicht werden.
Innerhalb einer Halbebene ist die schnellste Verbindung auch die kürzeste, und somit eine Gerade. Allerdings
ist die schnellste Strecke von A nach B nicht notwendigerweise eine Gerade. Entscheidend hierbei ist der
Eintrittsparameter a, bzw. das Verhältnis von zurückgelegter Strecke je Halbebene.
1. Stellen Sie eine Gleichung für die Reisedauer
T (a) = t1 (a) + t2 (a)
bei konstanten Geschwindigkeiten v1 und v2 in Abhängigkeit von a und den konstanten Größen y1 , y2
und d auf. Hinweis: Wir nutzen a und d anstelle von x1 und x2 der Übersichtlichkeit wegen.
Abbildung 3: Skizze einer Strecke von A nach B.
2. Stellen Sie eine Gleichung für die optimale Eintrittsstelle a auf, indem Sie die Euler-Lagrange-Gleichung
d ∂T
dT
−
=0
dt ∂ ȧ
da
für a auswerten. Sie müssen diese Gleichung nicht explizit lösen.
3. Vereinfachen Sie die aufgestellte Gleichung, indem Sie Ausdrücke für sin(α) oder sin(β) substituieren.
2.2 Das Brechungsgesetz [A07]
Aus der vorangegangenen Aufgabe kann man sehr leicht das Brechungsgesetz erhalten. Die Phasengeschwindigkeit von Licht in einem Medium mit Brechungsindex n ist näherungsweise gegeben durch v = nc . Durch
Einsetzen erhält man das Brechungsgesetz von Snellius
n1
sin(β)
.
=
n2
sin(α)
2.3 Der Harmonischer Oszillator und das Noether-Theorem [H08]
Gegeben sei die Lagrangefunktion des dreidimensionalen harmonischen Oszillators:
L =
3
3
mX 2 kX 2
ẋi −
x .
2 i=1
2 i=1 i
1. Zeigen Sie, dass sich die Lagrangefunktion unter den neun Transformationen mit festen Parametern
j, l
s
0(jl)
j, l ∈ {1, 2, 3}
xi
= xi + (δij ẋl + δil ẋj ),
2
transformiert wie
d
L (jl) (~x0 , ~x˙ 0 ) = L (~x, ~x˙ ) + s W (jl) (~x, t) + O s2 .
dt
Wie lautet die Funktion W (jl) (~x, t), die nur von ~x und t abhängt?
2. Berechnen Sie daraus die resultierenden neun Erhaltungsgrößen
(jl)
Γ
=
3
X
i=1
(jl)
hi
(~x, t)
∂L
− W (jl) (~x, t),
∂ ẋi
0(jl)
xi
(jl)
= xi + s hi
(~x, t).
Folgern Sie außerdem, dass die Gesamtenergie E = T + U sowie alle Komponenten des Drehimpulses
Li erhalten sind, indem Sie zeigen, dass
X
E∼
Γ(jj) ,
j
|Li | ∼
sX
ε2ijl (Γ(jj) Γ(ll) − Γ(jl) Γ(jl) ).
j,l
2.4 Schiefe Ebene [H09]
Gegeben sei eine schiefe Ebene, die mit dem Boden den Winkel α einschließe. Ein Block der Masse m, der
sich zum Zeitpunkt t = 0 in der Höhe h (in y-Richtung) auf der Ebene befinde, rutsche diese reibungsfrei
hinunter. Wie bewegt sich der Block? Lösen Sie mit dem Lagrangeformalismus zweiter Art. Geben Sie die
Lösung für alle Zeiten t ≥ 0 an.
2.5 Zwei Massen und eine Tischplatte [H09]
Gegeben sei eine Tischplatte mit einem Loch in der Mitte. Durch das Loch sei ein als masselos zu behandelndes Seil der Länge l geführt, an dessen Enden sich die Massen m1 und m2 befinden. Das Loch habe den
gleichen Durchmesser wie das Seil, wobei dieses reibungsfrei hindurch gleite. Die Masse m2 hänge senkrecht
nach unten, während Masse m1 reibungsfrei auf der Tischplatte rotiere.
1. Wie lauten die Zwangsbedingungen des Systems?
2. Stellen Sie die Lagrangefunktion und die zugehörigen Bewegungsgleichungen auf. Wählen Sie dazu
zunächst geeignete generalisierte Koordinaten (wie viele benötigen Sie?).
3. Wann rutscht die Masse m2 nach oben, wann nach unten?
4. Was passiert im Spezialfall, wenn m1 nicht mehr rotiert? Zeigen Sie durch explizite Rechnung.
2.6 Erzwungene Schwingung [H10]
Zwei Teilchen der Massen m1 und m2 seien durch eine masselose Feder mit der Federkonstante k gekoppelt.
Die Feder habe die Ruhelänge l0 . Das System sei horizontal und reibungsfrei gelagert. Auf die Masse m2
wirke entlang der Verbindungslinie die äußere, periodische Kraft
F = F0 cos ωt .
1. Stellen Sie die Lagrangefunktion in Abhängigkeit der Teilchenkoordinaten {x1 , x2 } und ihrer Ableitungen auf.
2. Wechseln Sie zu Schwerpunkts- und Relativkoordinaten {R, r}. Stellen Sie die Lagrangefunktion und
die Euler-Lagrange-Gleichungen auf.
3. Wie lautet die Lösung für die Bewegung des Schwerpunkts R(t)?
4. Finden Sie eine Lösung für die Relativbewegung r(t). Für die partikuläre Lösung können Sie den
Ansatz rp = B cos ωt + C verwenden.
5. Bestimmen Sie die Erregerfrequenz ω, für die sich m2 so bewegt, als ob es keine äußere Kraft gäbe.
2.7 Drei gekoppelte schwingende Massen [H10]
Zwei Massepunkte m seien durch masselose Federn der Federkonstante k mit einem Massepunkt M = 2m
verbunden, der sich zwischen den anderen beiden Massen befindet. Die Auslenkungen der Massen aus ihren
jeweiligen Ruhelagen seien von links nach rechts {x1 , x2 , x3 }.
1. Stellen Sie die Bewegungsgleichungen der Massepunkte auf und schreiben Sie diese als Matrixgleichung.
Aufgrund der Einfachheit des Problems können Sie die Bewegungsgleichungen auch direkt aus dem
Kräftegleichgewicht ohne Aufstellen der Lagrangefunktion hinschreiben.
2. Wie lauten die Eigenfrequenzen des Systems? Was ist die Bedingung an die Matrixgleichung für die
Existenz von nichttrivialen Lösungen?
3. Berechnen Sie die Lösung des Systems unter den Anfangsbedingungen x1 (0) = −d, x2 (0) = 0, x3 (0) =
d, ẋ1 (0) = ẋ2 (0) = 0 und ẋ3 (0) = v.
2.8 Gekoppelte Pendel [A10]
Zwei ebene mathematische Pendel mit verschiedenen Massen m1 und m2 sowie derselben Pendellänge l seien
im Abstand L voneinander aufgehängt und durch eine masselose Feder mit Federkonstante k und Ruhelänge
L miteinander verbunden. Die Pendel seien so montiert, dass sie sich ausschließlich in der x1 -x3 -Ebene
(reibungsfrei) bewegen können.
1. Stellen Sie die Lagrangefunktion mit den Winkeln θ1 und θ2 als verallgemeinerte Koordinaten auf und
nähern Sie diese für kleine Auslenkungen, d.h. für θ1 1 und θ2 1.
2. Bestimmen Sie die Eigenfrequenzen ω1 und ω2 des gekoppelten Pendels. Stellen Sie dafür die Bewegungsgleichungen auf und formulieren Sie sie als Matrixgleichung.
3. Stellen Sie die Winkel θ1 und θ2 über die Normalkoordinaten Q1 und Q2 dar. Wie verhalten sich die
Winkel demzufolge für die Anfangsbedingungen θ1 (0) = θ0 und θ2 (0) = θ̇1 (0) = θ̇2 (0) = 0?
3 Hamilton-Formalismus
3.1 Hamiltonsche Mechanik [H12]
In der Vorlesung wurde die Hamiltonfunktion eingeführt als
H({qa }, {pa }, t) =
n
X
q̇a pa − L.
a=1
Außerdem wurden die Hamiltonschen Bewegungsgleichungen hergeleitet:
ṗa = −
∂H
,
∂qa
q̇a =
∂H
.
∂pa
1. Geben Sie die Hamiltonfunktion H sowie die Hamiltonschen Bewegungsgleichungen für einen eindimensionalen harmonischen Oszillator an.
2. Zeigen Sie, dass gilt:
∂H
dH
=
.
dt
∂t
3. Wann ist demnach H erhalten?
4. Wie erkennt man im Lagrangeformalismus, dass die Energie erhalten ist?
3.2 Drei gekoppelte schwingende Massen im Hamiltonformalismus [H12]
Auf dem Hausaufgabenzettel 10 haben wir das Problem dreier gekoppelter schwingender Massen behandelt.
In dieser Aufgabe sollen die Bewegungsgleichungen für das Problem (wobei hier die Masse M unabhängig
von m sein soll) nochmals im Hamiltonschen Formalismus hergeleitet werden.
1. Stellen Sie für das Problem die Lagrangefunktion auf und berechnen Sie anschließend die Hamiltonfunktion.
2. Leiten Sie mithilfe der Hamiltonschen Bewegungsgleichungen die Bewegungsgleichungen des Systems
mẍ1 = −k(x1 − x2 )
M ẍ2 = −k(2x2 − x1 − x3 )
mẍ3 = −k(x3 − x2 )
her. In Analogie zur vorherigen Aufgabe bezeichnen wir mit {x1 , x2 , x3 } die Auslenkungen der Massen
aus ihren Ruhelagen von links nach rechts durchnummeriert.
4 Streuung
4.1 Streuung um kleine Winkel [H11]
Berechnen Sie den differentiellen Wirkungsquerschnitt für die Streuung um kleine Winkel am Potential
U = rαn , n > 0. Tipp: Aus der Vorlesung wissen Sie sicher noch, dass sich der Streuwinkel bei kleinen
Ablenkungen in Abhängigkeit vom Stoßparameter b aus
2b
θ=−
2
m v∞
Z∞
dU
dr
√
dr r2 − b2
b
berechnet. Drücken Sie die Lösung des obigen Integrals in Abhängigkeit der Eulerschen Gammafunktion mit
Hilfe von
Γ(x)Γ(y)
=
Γ(x + y)
Z1
0
aus.
tx−1 (1 − t)y−1 dt