Vorlesungs-Mitschrift - Theoretische Physik - Christian
Werbung

Theoretische Physik II:
Elektrodynamik
Michael Bonitz
Institut für Theoretische Physik und Astrophysik
Christian-Albrechts-Universität zu Kiel
Vorlesungsskript (nicht zur Verbreitung)
Kiel, 2017
2
Inhaltsverzeichnis
1 Einführung
1.1 Gegenstand der Elektrodynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Historische Bemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Grundbegriffe und Grundgleichungen der ED
2.1 Ladungen und Ströme . . . . . . . . . . . . . . . . .
2.1.1 Ladungen und Ladungsdichte . . . . . . . . .
2.1.2 Eigenschaften der Delta-Distribution . . . . .
2.1.3 Strom und Stromdichte . . . . . . . . . . . .
2.1.4 Ladungserhaltung und Kontinuitätsgleichung
2.1.5 Satz von Gauß und die Divergenz . . . . . . .
2.2 Mathematische Beschreibung von Vektorfeldern . . .
2.2.1 Eigenschaften der Vektoranalysisoperatoren .
2.2.2 Fundamentalsatz der Vektoranalysis . . . . .
2.3 Die Maxwell-Gleichungen . . . . . . . . . . . . . . .
2.3.1 Einheitensysteme der Elektrodynamik . . . .
2.3.2 Die Quellen des E-Feldes (Coulomb-Gesetz) .
2.3.3 Quellen des Magnetfeldes . . . . . . . . . . .
2.3.4 Wirbel des elektrischen Feldes . . . . . . . . .
2.3.5 Wirbel des Magnetfeldes . . . . . . . . . . . .
2.4 Energie und Impuls des elektromagnetischen Feldes .
2.4.1 Mechanische Energie-/Impulsbilanz . . . . . .
2.5 Lösungen der Übungsaufgaben . . . . . . . . . . . .
2.5.1 Delta-Distribution . . . . . . . . . . . . . . .
2.5.2 Satz von Gauß . . . . . . . . . . . . . . . . .
2.5.3 Satz von Stokes . . . . . . . . . . . . . . . . .
2.5.4 Vektoranalysis . . . . . . . . . . . . . . . . .
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
7
9
9
9
10
11
13
14
15
16
16
17
17
18
20
21
22
26
26
27
27
30
31
32
4
INHALTSVERZEICHNIS
Kapitel 1
Einführung
1.1
Gegenstand der Elektrodynamik
In der Mechanik beschäftigt man sich mit der Bewegung von Massen im Feld von Kräften. Es gilt für im
Allgemeinen N Massen m1 , ..., mN
mi r̈i = F i
Hierbei gibt es zwei Arten von Kräften:
1. externe (äußere) Felder, die externe Kräfte erzeugen: F1 , ..., FN
2. Wechselwirkungen zwischen zwei Massen (innere Kräfte) Fij
Betrachten wir das Beispiel von drei Teilchen:
m1 r̈1 = F 1 + F 13 + F 12
m2 r̈2 = F 2 + F 23 + F 21
m3 r̈3 = F 3 + F 32 + F 31
→ Lösung: ri (t), ṙi (t)
Hierbei werden in der Mechanik keine Aussagen über den Ursprung der Kräfte getroffen. In der Elektrodynamik
werden nun besondere Formen von Kräften untersucht, sowohl ihre Ursache als auch ihre Wirkung:
Gegenstand der Elektrodynamik (vorläufig):
• Verhalten von Teilchen mit Ladung unter dem Einfluss elektrischer oder magnetischer Kräfte
• Erzeugung elektrischer und magnetischer Kräfte durch Ladungen (bzw. bewegte Ladungen)
Die Ladung ist eine Grundeigenschaft aller Elementarteilchen z.B. (e, p, n). Es existiert eine Elementarladung
e0 mit:
e0 = 1, 6 · 10−19 C ,
1C = 1A · s (SI),
in alle Ladungen sind Vielfache von e0 , mit einer Ausnahme: In der Elementarteilchenphysik gibt es noch kleinere
Ladungseinheiten: Quarks können eine Ladung 13 oder 23 tragen. Die Coulombkraft zwischen zwei Ladungen
e1 , e2 hat folgende Proportionalität:
e1 e2
|FC | ∝ 2
r12
Betrachte folgende Skizze:
r 12
e1
e2
r2
r1
0
Abbildung 1.1: Richtungsabhänigkeit der Coulombkraft
5
6
KAPITEL 1. EINFÜHRUNG
Hier ist
r12 = r2 − r1
der Abstandsvektor. Also ist die Coulomb-Kraft zwischen e1 und e2 proportional zu:
|F 12 | ∝
e1 e2
|r12 |2
Die Coulombkraft ist parallel zum Verbindungsvektor r12 . Der Einheitsvektor in dieser Richtung ist:
r̂12 =
r12
|r12 |
Wir schreiben in Zukunft r12 = |r12 |. Das Coulombsche Kraftgesetz schreiben wir also mit einer Konstante c
an zu:
Coulomb-Kraft:
FC = c
e1 e2
3 r 12
r12
(1.1)
1. Die erste Möglichkeit zur Beschreibung der ED-Probleme ist die Lösung der mechanischen Bewegungsgleichungen mit der Coulombkraft. Hierbei treten folgende Probleme auf:
• Das Coulomb Gesetz beschreibt eine instantane Kraftwirkung. Wenn e1 und e2 sehr weit voneinander
entfernt wären, würde die damit verbundene unendlich große Übertragungsgeschwindigkeit der Relativitätstheorie widersprechen. Es muss eine endliche Ausbreitungsgeschwindigkeit der Kraftwirkung
existieren, somit ist dieser Zugang problematisch.
• Die Berechnung von r12 beim Fall ausgedehnter Körper mit räumlicher Ladungsverteilung ist unklar.
• Befinden sich zwei Ladungen in einem Medium (Moleküle, Ionen,...), so reagiert das Medium auf die
Ladung durch Stromfluss oder Polarisation. Außerdem sorgt die Abschirmung für eine qualitative
Veränderung der Wechselwirkung und das Gesetz (1.1) ist zu modifizieren.
2. Ein alternatives Vorgehen ist, die zwei Ladungen zu entkoppeln. Die erste Ladung erzeugt (ohne die
zweite) ein ”elektrische Feld”(Wirkung). Die Coulombkraft folgt dann aus der Wirkung des Feldes auf
die zweite Ladung. Das Feld erhält man, indem man aus der Kraft die Ladung e2 eliminiert:
FC = c
e1 e2
3 r 12 = E 1 · e2 = E 2 · e1
r12
Diese Prozedur ist natürlich symmetrisch. Das elektrische Feld einer Punktladung e1 , die sich am Ort
r1 = 0 befindet:
E 1 (r) = c
e1
r
r3
Für den allgemeinen Fall, dass sich e1 am Ort r1 befindet, gilt:
E-Feld einer Punktladung am Ort r1 :
E 1 (r) = c
e1
(r − r1 )
|r − r1 |3
(1.2)
Wie wir sehen werden, lassen sich mit diesem Zugang die genannten Probleme lösen. Fazit:
• an Stelle der Fernwirkungstheorie”(FC ) tritt jetzt eine Nahwirkungstheorie”(EC ).
• Die Kraftwirkung einer Ladung e1 wird durch ein Vektorfeld E 1 (r) mit r ∈ R beschrieben. Die Orientierung
ist radial von/zu einer Punktladung.
• Das elektrische Feld E besitzt eine eigenständige Realität, es existiert auch ohne eine Punktladung und
auch im Vakuum.
1.2. HISTORISCHE BEMERKUNGEN
7
• Das Magnetfeld B(r) wird analog zur obigen Beschreibung eingeführt. Es existiert eine Kraftwirkung
zwischen Strömen (Ampère-Gesetz)
FI ∝ I1 I2 → Feldbeschreibung durch B(r)
die einer “Fernwirkung” entspricht. Die zugehörige Nahwirkungstheorie wird über das Magnetfeld B formuliert.
Wie wir sehen werden, sind die beiden Felder
• E und B abhängig voneinander (Maxwell Gleichungen)
• E und B sind abhängig vom Bezugsystem (Relativitätstheorie)
Fragen:
• Was sind die Bewegungsgleichungen für E(r) und B(r)?
• Wie werden die Felder erzeugt?
• Was sind die Wechselwirkungen von Ladungen und Strömen mit E und B?
1.2
Historische Bemerkungen
Im Folgenden sind einige der grundlegenden Beiträge zur modernen Elektrodynamik zusammengestellt (diese
Liste erhebt keinen Anspruch auf Vollständigkeit):
• 1785, A. Coulomb: Entdeckung des Kraftgesetzes zwischen Ladungen
• 1820, Oersted: Ablenkung von Magneten durch Ströme
• 1822, A.-M. Ampere: Strom als Ursache des Magnetismus
• 1831, M. Faraday: Induktionsgesetz (Erzeugung eines Stroms durch einen bewegten Magneten); Einführung
des Feldbegriffs
• 1864, J.C. Maxwell: Entdeckung der Bewegungsgleichungen des elektromagnetischen Feldes; Vorhersage
elektromagnetischer Wellen
• 1880, H. Hertz: Experimenteller Nachweis elektromagnetischer Wellen
• 1899-1900, M. Planck: Entdeckung der Quantennatur des elektromagnetischen Feldes; Strahlungsgesetz
• 1905, A. Einstein: Spezielle Relativitätstheorie; endlich Ausbreitungsgeschwindigkeit EM Wellen (c); Äquivalenz
von elektrischem und magnetischem Feld
• bis 1950: R. Feynman, Tomonaga, F. Dyson, J. Schwinger u.a.: Formulierung der Quantentheorie des EM
Feldes (Quantenelektrodynamik, QED)
Mehr Informationen findet man z.B. bei Greiner [Gre08].
8
KAPITEL 1. EINFÜHRUNG
Kapitel 2
Grundbegriffe und Grundgleichungen
der ED
2.1
2.1.1
Ladungen und Ströme
Ladungen und Ladungsdichte
Bisher haben wir eine Punktladung e1 am Ort r1 mit einer Trajektorie {r1 (t), v 1 (t)} betrachtet. Allgemein
haben Ladungen aber eine endliche Ausdehnung bzw. es liegt eine räumliche Verteilung der Ladung vor. Analog
zur Massendichte in der Mechanik definieren wir die Ladungsdichte ρ(r, t) = ρ(x, y, z, t):
∆Q
ρ(r, t) := lim
∆V →0 ∆V
Z
∆Q(t) :=
ρ(r, t)dV (Gesamtladung)
(2.1)
∆V
Betrachte hierzu folgende Skizze. ∆Q ist die Ladung des Volumens ∆V .
Abbildung 2.1: Zur Definition der Ladungsdichte
Diese Definition stellt die Grundlage zur Kontinuumsbeschreibung im Rahmen einer Feldtheorie dar. Eine Frage
ist jetzt: Wie ist ρ sinnvoll für den Spezialfall Punktladungen zu verstehen? Betrachte den Grenzwert in der
Umgebung einer Punktladung e1 :
lim ∆Q = e1 , was bedeutet: ρ(r1 ) = lim
∆V →0
∆V →0
9
∆Q
e1
=
=∞
∆V
lim ∆V
∆V →0
10
KAPITEL 2. GRUNDBEGRIFFE UND GRUNDGLEICHUNGEN DER ED
Hier macht die Verwendung der sogenannten Delta-Funktion δ(x) Sinn:
(
0 , x 6= 0
δ(x) =
∞ ,x = 0
∞
Z
mit
δ(x)dx = 1
(2.2)
(2.3)
−∞
Diese Distribution δ(x) beschreibt das Modell einer Punktladung. Die Divergenz tritt aber in der Realität
nicht auf, in der keine wirklichen Punktladungen existieren. Hierzu betrachte die folgende Skizze und folgendes
Beispiel auf der rechten Seite:
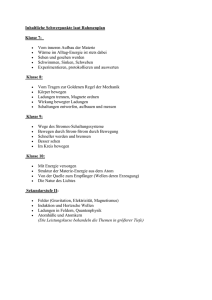
Abbildung 2.2: Ladungsdichte von Elementarladungen. Auch sie besitzen eine endliche
Ausdehnung.
Abbildung 2.3: Ladungsdichte eines Wasserstoffatoms
Für das Beispiel gilt aB ∝ 0, 5 · 10−10 m. Die Ladungsdichte des Elektrons schätzen wir ab zu:
e0
ρ0 a3B ∝ −e0 → ρ0 ∝ − 3
aB
Das allgemeine Resultat für eine Punktladung e1 bei r1 = (x1 , y1 , z1 ) ist in R3 :
ρ(r) = e1 δ(x − x1 )δ(y − y1 )δ(z − z1 )
oder kompakt: ρ(r) := e1 δ(r − r1 )
(2.4)
Dies gilt wegen der Normierung:
Z
3
ρ(r)d r = e1
Z∞
−∞
δ(x − x1 )dx
Z∞
−∞
δ(y − y1 )dy
Z∞
−∞
δ(z − z1 )dz = e1
Die Verallgemeinerung auf N Punktladungen mit e1 bei r1 ,...,eN bei rN ergibt:
Ladungsdichte von N Punktladungen:
ρ(r) =
N
X
i=1
2.1.2
ei δ(r − ri )
(2.5)
Eigenschaften der Delta-Distribution
Man beweise die folgenden Eigenschaften der Delta-Distribution. Die Beweise finden sich in Abschnitt 2.5.1.
1. Behauptung:
Es gilt für eine stetige Funktion f (x):
Z∞
−∞
δ(x − x0 )f (x)dx = f (x0 )
(2.6)
11
2.1. LADUNGEN UND STRÖME
2. Behauptung:
Es gilt
Z∞
−∞
3. Behauptung:
4. Behauptung:
5. Behauptung:
δ ′ (x − x0 )f (x) = −f ′ (x0 )
Die Delta-Distribution ist achsensymmetrisch. Es gilt also:
δ(x) = δ(−x)
(2.8)
f (x)δ(x) = f (0)δ(x).
(2.9)
Es gilt:
Sei h eine Funktion und seien xi mit i = 1, ..., N einfache Nullstellen von h. Dann gilt:
δ[h(x)] =
N
X
δ(x − xi )
i=1
6. Behauptung:
Distribution:
|h′ (xi )|
(2.10)
Mit den Eigenschaften der Fouriertransformation erhält man folgende Darstellung der Delta-
δ(x − x0 ) =
2.1.3
(2.7)
1
2π
Z∞
eik(x−x0 ) dk
(2.11)
−∞
Strom und Stromdichte
Die Ladungsdichte ist bestimmt durch die Anzahl der Ladungen im Volumen ∆V .
Strom ist eine Größe, die beschreibt, wie viele Ladungen ∆Q durch eine Fläche ∆F pro Zeit ∆t gehen.
∆I(t) := lim
∆t→0
∆Q
(∆F, t)
∆t
(2.12)
mit der Einheit:
[I] =
[Q]
C
=
=A
[t]
s
Es gibt nun zwei mögliche Fälle:
1. Es liegt eine kontinuierliche Stromverteilung vor.
2. Es liegen diskrete sich bewegende (Punkt-) Ladungen vor.
Der Fall 1. legt folgende Definition der Stromdichte j(r) nahe.
Wir definieren die Stromdichte durch:
I(t) :=
Z
j(r, t)df
(2.13)
∆F
Wobei n||df gilt.
Das obige Integral ist ein vektorielles Flächenintegral, oder Flächenintergral zweiter Art. Der Vektor n ist der
Normalenvektor auf der Fläche ∆F . Hat die Fläche ∆F eine Parametrisierung ϕ(x, y), für die gilt,
ϕ : U → R3
12
KAPITEL 2. GRUNDBEGRIFFE UND GRUNDGLEICHUNGEN DER ED
so ist das obige Integral explizit:
I(t) :=
Z
j(r, t)df =
∆F
Z
∂ϕ
∂ϕ
j(ϕ(x, y)) ◦ (x, y) ×
(x, y) d(x, y)
∂y
∂x
{z
}
|
U
n
Diese Definition ist anschaulich, da für ein kleines Flächenelement df gilt:
j(r, t) ◦ df = dI(t)
Abbildung 2.5: Zerlegung der Fläche ∆F in
Flächenelemente ∆Fi
Abbildung 2.4: Stromdichte j durch einen
Leiter mit Radius R
Alternativ kann man die Stromdichte über folgende Summe definieren:
Strom und Stromdichte:
I(t) =
lim
∆Fi →0
N →∞
N
X
j(r, t)∆F i
(2.14)
i=1
∆F =N ∆Fi
Bei beiden Definitionen ist der Vektorcharakter zu beachten. j ◦ ∆F ist ein Skalarprodukt, und daher wird der
Integrand für j||n maximal und für j ⊥ n wird der Integrand gleich Null.
Der Fall 2. legt folgende Definition der Stromdichte für Punktladungen (e1 , r1 , v 1 ),...,(eN , rN , v N ) nahe:
Stromdichte von Punktladungen:
j(r, t) =
N
X
i=1
Für die Einheit der Stromdichte gilt: [j] =
[Q]
[t][l2 ]
ei ṙi (t)δ[r − ri (t)]
=
(2.15)
A
m2
Beispiel:
Betrachte eine stationäre Strömung von geladenen Teilchen mit der Geschwindigkeit u. Betrachtet man folgende Abbildung
13
2.1. LADUNGEN UND STRÖME
Abbildung 2.6: Stationäre Strömung durch eine Fläche ∆F
so ergeben sich
x
∆t
∆V = x∆F
u||nF
u=
N
. Dann gilt für die Ladungsdichte ρ :=
Außerdem definieren wir die Teilchendichte n = ∆V
und ρ zeitunabhängig. Für die Gesamtladung Q gilt:
eN
∆V
, hier sind also n
Q = eN = en∆V = enx∆F
Mit dem Strom I =
Q
∆t
ergibt sich die Stromdichte zu:
j=
I
Q
enx∆F
enx
=
=
=
= enu
∆F
∆t∆F
∆t∆F
∆t
Damit gilt also:
Stromdichte eines stationären Stroms:
j = enu
(2.16)
Beachte, dass im Allgemeinen nicht j ∝ dρ
dt gilt, da hier ρ̇ = 0 , aber j 6= 0. Danach sind ρ und j nicht unabhängig
voneinander. Wie der Zusammenhang aussieht ist Gegenstand der Kontinuitätsgleichung.
2.1.4
Ladungserhaltung und Kontinuitätsgleichung
Eine Gesamtbilanz von Ladungen ergibt sich
über den Zu- und Abfluss von Ladungen.
Sei F die Oberfläche des Volumens V dann
gilt nach vorigem Abschnitt für den Gesamtstrom durch F :
I
IF (t) =
j(r, t)df
F =∂V
, wobei das Integral mit df ||n nach außen
zeigenden Normalenvektoren versehen ist.
Abbildung 2.7: Strom und Ladungsbilanz in
einem Volumen V
14
KAPITEL 2. GRUNDBEGRIFFE UND GRUNDGLEICHUNGEN DER ED
Hierbei gilt für den Gesamtstrom durch die Fläche F :
(
> 0, Strom aus V dominiert
IF =
< 0, Strom in V dominiert
Wir postulieren folgenden Zusammenhang. Wenn das System abgeschlossen ist, also Ladungen weder erzeugt
noch vernichtet werden (keine Ionisation, Paarerzeugung, etc.), muss die Gesamtzahl der Ladungen erhalten
bleiben. Es gilt also folgende integrale Gesamtbilanz:
Ladungserhaltungssatz:
d
QV + IF = 0.
dt
(2.17)
Das bedeutet, dass sich die Gesamtladung QV im Volumen V nur ändern kann, wenn es einen Strom durch die
Oberfläche ∂V gibt. Hieraus kann man jetzt eine lokale Ladungsbilanz ableiten. Diese stellt einen Zusammenhang
zwischen ρ(r, t) und j(r, t) für alle r ∈ R3 und t ∈ R dar:
I
Z
d
j(r, t)df = 0.
(2.18)
ρ(r, t)dV +
dt
V
F (V )
Um dies einfacher zu schreiben benötigen wir den Satz von Gauß und die Definition der Divergenz.
2.1.5
Satz von Gauß und die Divergenz
Die Beziehung (2.18) soll in eine lokale Form ohne Integrale umgeformt werden. Hierfür benutzen wir den Satz
von Gauß, der für ein beliebiges differenzierbares Vektorfeld A(r, t) folgendes aussagt:
Satz von Gauß:
I
A(r, t)dV =
Z
div A(r, t)dV
(2.19)
V
F (V )
Hierbei ist die Divergenz eines beliebigen Vektorfeldes A(r) = {Ax (r), Ay (r), Az (r)} wie folgt definiert1 :
div A(r) =
Übungsaufgabe:
∂Ax (r) ∂Ay (r) ∂Az (r)
+
+
.
∂x
∂y
∂z
(2.20)
Man beweise den Satz von Gauß2 .
Benutzt man diesen Satz in (2.18), so folgt:
Z
Z
dρ(r, t)
dV + div j(r, t)dV = 0
dt
V
V
Z d
⇔
ρ(r, t) + div j(r, t) dV = 0
dt
V
Da dies für alle ρ(r) und j(r) gilt, muss der Integrand verschwinden. Es folgt also die lokale Form der Ladungserhaltung:
Kontinuitätsgleichung:
dρ(r, t)
+ div j(r, t) = 0
dt
1 Das
2 Die
Resultat ist ein Skalar, das ortsabhängig ist, also ein skalares Feld.
Lösung findet sich in Abschnitt 2.5.2
(2.21)
2.2. MATHEMATISCHE BESCHREIBUNG VON VEKTORFELDERN
15
Bemerkungen:
• Ladungserhaltung ist nicht gleichbedeutend mit Teilchenzahlerhaltung. Fügt man z.B. ein Teilchenpaar
mit positiver und negativer Ladung, q+ = −q− hinzu, so ändert sich die Anzahl N der Teilchen, aber
trotzdem ist Q =const.
• Man bezeichnet den Strom IF auch als die Quellstärke des Vektorfeldes j.
I
Z
IF = jdf = div jdV
F
V
Hierbei bezeichnet man div j als Quelldichte oder als Quellstärke pro Volumen. Das Veranschaulichen wir
durch Betrachtung eines kleinen Volumens. Hier wird dann mit:
Z
X
dV ⇒
∆V
und für ein kleines Volumen ∆V :
div j =
2.2
IF
∆V
Mathematische Beschreibung von Vektorfeldern
Der Gegenstand der Elektrodynamik sind die Felder E, B, j und ρ. Die ersten drei sind Vektorfelder, und ρ ist
ein Skalarfeld. Wir betrachten die Eigenschaften im Folgenden an Hand eines allgemeinen Vektorfeldes F (r).
• Der Satz von Gauß, der ein Flächenintegral in ein Volumenintegral überführt (2.19).
• Zusätzlich kann man noch das Linienintegral längs einer Kurve γ betrachten:
Z
X
F (r)dr = lim
F (r)∆ri
∆ri →∞
N →∞
γ
(2.22)
Dieses ist also abhängig von F und γ. Man bezeichnet das obige Integral auch als vektorielles Kurvenintegral oder Kurvenintegral zweiter Art.
• Betrachtet man der Spezialfall einer geschlossenen Kontur γ so gilt der
Satz von Stokes:
I
F (r)dr =
Z
rot F (r)df
(2.23)
A
γ(A)
Man intepretiert dieses als die Wirbelstärke der in γ eingeschlossenen Fläche.
Übungsaufgabe:
Man beweise den Satz von Stokes3 .
Definition der Rotation:
nieren:
Betrachten wir noch einmal den Differentialoperator Rotation genauer. Wir defirot F (r) : = ∇ × F
= êx (∂y Fz − ∂z Fy ) + ...
X
=
ǫijk (∂xj Fk − ∂xk Fj )
i
Hierbei ist ǫijk der antisymmetrische Tensor.
1,
ǫijk = 0,
−1,
3 Die
Lösung findet sich in Abschnitt 2.5.3.
i<j<k
i = j oder i = k oder j = k
i<k<j
(2.24)
(2.25)
(2.26)
16
KAPITEL 2. GRUNDBEGRIFFE UND GRUNDGLEICHUNGEN DER ED
2.2.1
Eigenschaften der Vektoranalysisoperatoren
Es gelten folgende Relationen, die wir als Behauptungen (1-3) formulieren4 . Hierbei seien im Folgenden U (r)
ein Skalarfeld und F (r) ein Vektorfeld des R3 .
1. Behauptung:
div grad(U (r)) = ∆U (r)
(2.27)
Hierbei ist ∆ = ∂x2 + ∂y2 + ∂z2 der sogenannte Laplace-Operator.
2. Behauptung:
grad div(F (r)) − ∆F = rot rot F
3. Behauptung
Für eine beliebiges F (r) gilt
div rot F = 0
4. Behauptung:
(2.29)
Für ein beliebiges skalares Feld ρ(r) existiert eine eindeutige Lösung der Poissongleichung:
∆U = ρ(r),
ρ1
U1
die auf ∆ U2 = ρ2 verallgemeinert werden kann. Der Beweis folgt später.
ρ3
U3
2.2.2
(2.28)
(2.30)
Fundamentalsatz der Vektoranalysis
Satz: Alle Vektorfelder F (r) mit lim F (r) = 0 und lim ∂ri F (r) mit i = 1, ..., 3 lassen sich eindeutig
|r|→∞
|r|→∞
darstellen als Summe eines quellenfreien und eines wirbelfreien Beitrages. Also gilt:
F (r) = F q (r) + F w (r)
(2.31)
mit div F q = 0 und rot F w = 0. Dies kann man auch umformulieren zu:
div F (r) = div F w (r)
rot F (r) = rot F q (r)
Beweis: Zunächst konstruieren wir den quellenfreien Anteil F q aus einem gegebenen F . Betrachte eine Formulierung in obigem Satz und wende auf beide Seiten die Rotation an:
rot F = rot F q
rot rot F = rot rot F q = grad(div F q ) − ∆F q ,
| {z }
=0
Also erhält man wegen (2.65) eine Bestimmungsgleichung des quellenfreien Anteils F q zu:
rot rot F = −∆F q .
Dies ist die Poissongleichung, die eine eindeutige Lösung besitzt, wie wir später zeigen werden. Jetzt konstruieren
wir die Bestimmungsgleichung des wirbelfreien Anteils F w des gegebenen Feldes F . Auf die zweite Formulierung
des Satzes
div F = div F w
wird der Gradient angewendet:
grad div F = grad div F w = rot rot F w +∆F w ,
| {z }
=0
4 Die
Beweise finden sich im Abschnitt 2.5.4.
17
2.3. DIE MAXWELL-GLEICHUNGEN
wobei wieder Gleichung (2.65) verwendet wurde, so dass folgende Bestimmungsgleichung gilt:
grad div F = ∆F w
Also ist auch die Summe ∆F = ∆(F w + F q ) nach vorigem Abschnitt eindeutig lösbar. Als Fazit kann man
also feststellen, dass ein allgemeines Vektorfeld eindeutig durch seine Quellen und Wirbel bestimmt ist. Wir
benutzen den Satz im Folgenden, um das Gesamtfeld F zu finden.
In der Elektrodynamik gibt es zwei relevante Felder (E, B), und es interessieren uns die Bewegungsgleichungen
dieser Felder. Wir benötigen also Kenntnis von den Quellen und Wirbeln von E und B:
Q E , QB , W E , W B .
Um die Felder E und B zu bestimmen, hat man also folgende Gleichungen zu lösen, welche auch gleich die
allgemeinste Struktur der Feldgleichungen für E(r) und B(r) darstellen:
div E = QE
rot E = W E
div B = QB
rot B = W B
Im folgenden Abschnitt bestimmen wir diese Anteile aus der Erfahrung mit elektromagnetischen Prozessen
(Experimenten), die wir so weit wie möglich verallgemeiner.
2.3
Die Maxwell-Gleichungen
Die Maxwellgleichungen sind ein Postulat. Wir können sie jedoch durch Verallgemeinerung der Experimente
und Benutzung der allgemeinen Feldgleichungen sehr gut begründen. Bevor wir hierzu kommen, besprechen wir
noch kurz die Einheitensysteme der ED.
2.3.1
Einheitensysteme der Elektrodynamik
Folgende Tabelle erlaubt uns, zwischen dem CGS- und dem SI-System zu wechseln. Für theoretische Betrachtungen eignet sich das CGS System besser, weil es eine erhöhte Symmetrie vieler Gleichungen liefert. Für die
Ermittlung von Werten ist das SI System intuitiver.
kq
kq
kI
kB
kI
CGS
SI
1
4π
1
4πǫ0
1
ǫ0
µ0
4π
1
c2
1
c
4π
c
1
µ0
Tabelle 2.1: CGS- und SI-Wert einiger Konstanten.
Die hier vorkommenden Konstanten sind die elektrische Feldkonstante
ǫ0 = 8, 85 · 10−12
A·s
V ·m
die magnetische Feldkonstante
µ0 = 1, 26 · 10−6
N
A2
und die Lichtgeschwindigkeit
c= √
1
m
= 299.792.458 .
ǫ 0 µ0
s
18
KAPITEL 2. GRUNDBEGRIFFE UND GRUNDGLEICHUNGEN DER ED
Größe
Symbol
SI-Einheit
Gaußsche Einheit
Ladung
Strom
Spannung
q
I
U
1 Coulomb (C)
1 Ampere (A)
1 Volt (V)
Elektrische Feldstärke
Elektrische Verschiebung
Magnetische Feldstärke
Magnetische Induktion
Magnetischer Fluß
E
D
H
B
Φ
V
1m
A·s
1 m2
A
1m
V ·s
1 m2 = 1Tesla (T )
1 Weber (W b)
3 · 109 stat Coul
3 · 109 stat Amp
1/3 · 10−2 stat Volt
1/3 · 10−4 stat Volt/cm
4π · 3 · 103 stat Volt/cm
4π · 10−3 Oersted (Oe)
104 Gauß (G)
8
10 Maxwell (M x)
Widerstand
Kapazität
Induktivität
R
C
L
1 Ohm (Ω)
1 Farad (F )
1 Henry (H)
1/9 · 10−11 s/cm
9 · 1011 cm
1/9 · 10−11 s2 /cm
Tabelle 2.2: Umrechnungsfaktoren zwischen Gauß- und SI-Einheiten ([Gre08])
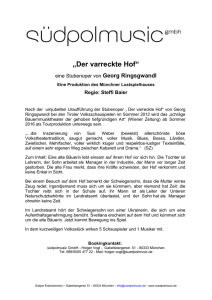
2.3.2
Die Quellen des E-Feldes (Coulomb-Gesetz)
Die Erfahrung bzw. das Experiment verrät uns folgendes über die Kraftwirkung zwischen zwei geladenen Teilchen
q und Q. Die Konstante aus dem einführenden Abschnitt heißt hier kq :
F = kq
Qq r
= E(r) q,
| {z }
r2 r
von Q
wobei r der Verbindungsvektor der Teilchen ist. Die Kraft kann anziehend oder abstoßend sein. Außerdem folgt
die radialsymmetrische Feldverteilung einer Punktladung bei r = 0:
E(r) = kq
Qr
r2 r
q
r
Q
Abbildung 2.8: Kraft und Feld einer Punktladung
Jetzt verallgemeinern wir dieses Ergebnis schrittweise.
1. Wir betrachten den Fluss der E-Feldes, ΦE , durch eine Fläche df . Betrachte hierzu zunächst eine Kugel.
Es gilt dann:
dV = dr r2 sin(θ)dθdϕ
| {z }
dΩ
{z
}
|
df
Das Feld E ist radial gerichtet. Betrachtet man also ein Flächenelement df , so ist der Flächennormalenvektor
ein radialer und es gilt: df = df rr . Also gilt für den Fluss dΦE durch ein Flächenelement df :
Qr 2 r
r dΩ
r2 r
r
dΦE = kq QdΩ
dΦE
= kq Q
dΩ
Dieses Ergebnis ist deshalb bemerkenswert, weil es nur von der Ladung abhängt und nicht von r oder von
einem Winkel. Der Fluss durch die gesamte Kugel ergibt sich folgendermaßen:
I
(2.32)
ΦE =
Edf = E4πr2 = kqQ4π
dΦE = Edf = kq
F (V )
R=const.
19
2.3. DIE MAXWELL-GLEICHUNGEN
Abbildung 2.9: Zur Definition des Raumwinkel- und Flächenelements
2. Wir verallgemeinern dieses Ergebnis nun auf beliebige Oberflächen. Betrachte hierzu folgendes Volumen
V , welches durch die beiden Flächen K und F begrenzt wird.
Abbildung 2.10: Volumen V , das von den Oberflächen F und K begrenzt wird.
Hierbei sind die Flächennormalenvektoren für F definiert zu:
E ◦ nF > 0
und für K definiert zu:
E ◦ nK < 0
Die Gesamtoberfläche O ist O = F ∪ K. Der Gesamtfluss durch O ergibt sich zu:
I
I
Z
I
div EdV,
ΦE |O = Edf = Edf − Edf =
F
O
K
V (O)
wobei die letzte Gleichung aus dem Gaußschen Satz folgt. Wir betrachten nun den Integranden:
r
1
3
3
1
div E = kq Q∇ 3 = kq Q
∇r
−
=
kqQ
=0
+
r∇
r
r3
r3
r3
r3
Hierbei wurde benutzt:
div r =
∂
∂
∂
(x) +
(y) +
(z) = 3
∂x
∂y
∂z
und
grad
r2
r r
1
=
−3
=
−3
r3
r4 r
r5
Hieraus folgt also insgesamt:
ΦE | O = 0
Da dieses Resultat für ein beliebiges Volumen V gilt, ziehen wir das Fazit:
20
KAPITEL 2. GRUNDBEGRIFFE UND GRUNDGLEICHUNGEN DER ED
Der Fluss von E durch eine geschlossene Oberfläche hängt nur von der eingeschlossenen Ladung ab.
Verallgemeinert man dieses Ergebnis auf N Punktladungen, die von einer Oberfläche F eingeschlossen sind, so
gilt:
I
N
X
Edf = kq
Qi
i=1
F
Wir gehen jetzt über zu einer lokalen Betrachtung. Sei eine Ladung Q bei r = 0 gegeben. Sei K(R) eine
Kugeloberfläche mit Radius R um die Ladung. Es gilt dann:
Z
kq Q =
div EdV
V (K)
Hier wurde mit Gleichung (2.32) und dem Satz von Gauss argumentiert. Dieses Resultat ist unabhängig von
R. Das heißt bei dV → 0 muss div E → ∞ gelten. Also für R = r. Also muss div E von der Form einer
Deltafunktion sein. Es gilt:
Z
δ(r)dV = 1
Also muss gelten:
div E = kq Qδ(r)
Dieses verallgemeinern wir auf N Ladungen an den Orten ri :
N
X
div E(r) = kq
i=1
Qi δ(r − ri )
|
{z
}
ρ(r) ist die Ladungsdichte für N Punktladungen
Verallgemeinert man dies auf eine beliebige (auch räumlich ausgedehnte) Ladungsdichte ρ(r), so erhält man die
Integrale Form der ersten Maxwell-Gleichung:
Z
I
ΦE = Edf = kq QGes = kq
F
d3 rρ(r)
(2.33)
V (F )
Überführt man den Fluss mit dem Satz von Gauss in ein Volumenintegral so ergibt sich die lokale Form:
Differentielle Form der ersten Maxwell-Gleichung:
div E(r, t) = kq ρ(r)
2.3.3
(2.34)
Quellen des Magnetfeldes
Die Frage ist jetzt, ob punktförmige Quellen für das Magnetfeld B existieren. Das Experiment hat bisher keine
gefunden, sondern bisher nur dipolartige Felder festellen können. Also folgt für die Quellen des Magnetfeldes:
Lokale Form der zweiten Maxwell-Gleichung:
div B(r, t) = 0
Integrale Form der zweiten Maxwell-Gleichung:
I
Bdf = 0
F
(2.35)
(2.36)
21
2.3. DIE MAXWELL-GLEICHUNGEN
2.3.4
Wirbel des elektrischen Feldes
Versuche der Form, dass man einen Stabmagnet durch eine Leiterschleife bewegt und einen Stromfluss misst,
führten zur Entdeckung des Induktionsgesetzes durch Faraday. Es entsteht ein Stromfluss in vielen Situationen,
z.B. bei
• einer zeitlichen Änderung des Magnetfeldes →
d
dt B
6= 0
• Bewegung der Kontur L
• Deformation der Kontur L
Abbildung 2.11: Versuch zum Induktionsgesetz
Man fasst alle diese Effekte in einer einzigen Größe zusammen: dem magnetische Fluss ΦB |A(L) des Magnetfeldes
durch die von L begrenzte Fläche A,
ΦB |A(L) =
I
Bdf
A(L)
Der induzierte Strom ist also verknüpft mit einer zeitlichen Änderung von ΦB . Andererseits ist ein Stromfluss
I die Reaktion auf eine induzierte Spannung UR . Der Zusammenhang ist hier als Verallgemeinerung des Falls
eines homogenen elektrischen Feldes U = E · d, wobei d der Abstand ist, aus
Abbildung 2.12: Elektrisches Feld zwischen zwei Platten im Abstand d.
zu erkennen:
UR =
X
E i dri
i
beziehungsweise:
I
L(A)
Edr = UR
22
KAPITEL 2. GRUNDBEGRIFFE UND GRUNDGLEICHUNGEN DER ED
Abbildung 2.13: Berechnung der Ringspannung in einem geschlossenen Leiter L.
Das Experiment zeigt den globalen Zusammenhang zwischen der induzierten Spannung und dem Magnetfeld.
Insbesondere beobachtet man ein negatives Vorzeichen - man nennt dies Lenz’sche Regel:
UR = −kB
dΦB
dt
(2.37)
Hieraus kann man über den Satz von Stokes zur lokalen Form übergehen:
− kB
Z A
d
dt
Z
A
Bdf = −kB
dΦB
|A =
dt
I
Edr =
L(A)
rot E + kB
d
B df = 0
dt
Z
rot Edf
(2.38)
A
(2.39)
Letzteres gilt für eine beliebige Fläche. Damit müssen die Integranden gleich sein, und es folgt das Resultat für
die Wirbel des elektrischen Feldes, und damit die
Lokale Form der dritten Maxwell-Gleichung:
rot E(r, t) = −kB
d
B(r, t))
dt
Integrale Form der dritten Maxwell-Gleichung:
Z
I
d
Bdf
Edr = −kB
dt A
(2.40)
(2.41)
L(A)
2.3.5
Wirbel des Magnetfeldes
Wir fragen uns jetzt, was die Ursachen für ein magnetisches Wirbelfeld sind. Das Experiment zeigt, dass ein
Strom I ein Magnetfeld erzeugt (Ampere-Gesetz). Dieses Magnetfeld ist ein Wirbelfeld (geschlossene Feldlinien)
und die Feldstärke folgt folgender Proportionalität:
B∝
I
r
Dieses Magnetfeld ist parallel zum Vektor êϕ in Zylinderkoordinaten.
23
2.3. DIE MAXWELL-GLEICHUNGEN
L
êϕ
B
I
Abbildung 2.14: Ringförmiges Magnetfeld in Folge eines Stroms, senkrecht zur Blattebene
Durch Einführung einer konstanten ergibt sich die Gleichung
B(r) =
kI I
,
2π(r
4π
c ,
mit: kI =
µ0 ,
CGS
SI
Analog zum Vorgehen des vorigen Abschnitts finden wir die magnetische Ringspannung:
I
kI I
B(r)dr = B(r)2πr =
2πr = k I · I,
2π r
L
die durch den Strom I hervorgerufen wird. Die Auswertung des Linienintegrals im ersten Schritt ist in Ordnung,
da L einen Kreis mit Radius r parametrisiert und aus dem Experiment folgte, dass B(r) auf einem solchen Kreis
konstant ist. Dieses Ergebnis wird wieder schrittweise verallgemeinert:
1. Es liegen nun N Ströme vor. Dann gilt
Iges =
N
X
Ii
i=1
und das Magnetfeld wird durch Iges erzeugt. Dies gilt natürlich nur mit der Additivität und der Unabhängigkeit der Einzelströme (Hypothese).
2. Analog zum Vorgehen bei der Ladungsdichte, möchten wir jetzt auch Ströme mit endlicher Ausdehnung
betrachten. Wir führen folgende Ersetzung durch:
Z
X
Ii →
Iges :
jdf
i
F (L)
Es folgt die vorläufige Form der vierten Maxwell-Gleichung (Integralform):
I
Bdr = kI Iges |F (L)
(2.42)
L
Der Übergang zur lokalen Form geschieht mit dem Satz von Stokes und dem Argument, dass die Integranden übereinstimmen müssen (beliebige Kontur L)
Z
Z
jdf
rot Bdf = kI
F (L)
F (L)
⇒ rot B(r, t) = kI j(r, t)
(2.43)
Dies ist die vorläufige lokale Form der 4.Maxwell-Gleichung. Diese Maxwell-Gleichung wollen wir noch testen,
indem wir die Divergenz dieser Gleichung bilden. Nach dem Fundamentalsatz müsste die Divergenz des magnetischen Wirbelfelds rot B null sein. Hieraus folgt aber auch:
kI div j = 0
⇒ div j(r, t) = 0
24
KAPITEL 2. GRUNDBEGRIFFE UND GRUNDGLEICHUNGEN DER ED
Dies ist ein Ergebnis, was fragwürdig erscheint. Wir zeigen mit Hilfe der Kontinuitätsgleichung den auftretenden
Widerspruch. Nach dieser gilt:
∂ρ
+ div j = 0
∂t
Obiges Ergebnis für die Stromdichte führt hier auf das Ergebnis:
ρ̇(r, t) = 0
Das heißt, es dürfte keine zeitlich veränderte Ladungsdichte geben. Bildet man die Zeitableitung der ersten
Maxwell-Gleichung, führt dies außerdem auf:
div Ė(r, t) = kq ρ̇(r, t) = 0
Da es aber Experimente mit div Ė 6= 0 gibt, ist dies ein Widerspruch, ρ̇ = 0 kann also nicht immer gelten, und
die vierte Maxwell-Gleichung kann noch nicht vollständig sein. Maxwells Ansatz zur Lösung des Problems war,
die Stromdichte in Gleichung (2.43) durch eine Gesamtstromdichte zu ersetzen:
j → j ges
Mit j ges = j + j s soll
div j ges = 0
(2.44)
gelten und so die obige Gleichung erfüllen. Die zweite eingeführte Stromdichte j s stammt aus der zeitlichen
Änderung des elektrischen Feldes und wird als Verschiebungsstromdichte bezeichnet. Aus der Kombination
von Kontinuitätsgleichung und erster Maxwell-Gleichung folgt nun ähnlich wie oben:
1
div Ė = − div j s
kq
1
s
=0
⇒ div j + Ė
kq
1
⇒j s = − Ė
kq
ρ̇ =
Hiermit folgt die korrekte differentielle Form der vierten Maxwell-Gleichung zu:
Lokale Form der vierten Maxwell-Gleichung:
rot B = kI
j+
1
Ė
kq
(2.45)
Die integrale Form dieser vierten Maxwell-Gleichung erhält man durch Integration über die Fläche und anschließende Anwendung des Satzes von Stokes auf die linke Seite:
Integrale Form der vierten Maxwell-Gleichung:
Z I
1
j + Ė df
Bdr = kI
kq
L(F )
(2.46)
F (L)
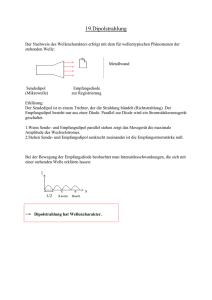
Wir besprechen nun ein Beispiel für einen Verschiebungsstrom j s ohne bewegte Ladungen. Betrachte folgende
Skizze eines kurzschließbaren Kondensators:
25
2.3. DIE MAXWELL-GLEICHUNGEN
Abbildung 2.15: kurzschließbarer Kondensator
Ein Schließen dieses Schalters bewirkt nach endlicher Zeit E = 0. Zuvor ist jedoch ∂E
∂t 6= 0, daher ist die
Verschiebungsstromdichte js 6= 0 und bewirkt, nach der vierten Maxwell-Gleichung, ein magnetisches Wirbelfeld. Da nun eine Änderung eines magnetischen Feldes stattgefunden hat, entsteht wiederum nach der dritten
Maxwell-Gleichung ein elektrisches Feld. Dieser Prozess setzt sich im Idealfall fort. Das Experiment bestätigt
vielfach diese wechselseitige Kopplung. Das bekannteste Beispiel sind die hierbei entstehenden elektromagnetischen Wellen. In folgender Tabelle fassen wir noch einmal die Ergebnisse dieses Abschnitts zusammen:
MW.-Gl.
Differentielle Form
1
div E = kq ρ
2
div B = 0
3
rot E = −kB Ḃ
rot B = kI j + kĖ
4
Integralform
R
Edf = kq ρdV = kq Qges
V
F
R V
Bdf = 0
F
H
R
d
Edr = −kB dt
Bdf
L
F (L) H
R
Bdr = kI
j + kĖ df
H
q
L
F (L)
q
Experimente
Coulombgesetz
∄ magn. Monopole
Induktionsgesetz
Ampère Gesetz
Tabelle 2.3: Maxwell-Gleichungen in differentieller und integraler Form.
Durch Verwendung der Konstanten ist diese Schreibweise unabhängig vom Einheitensystem.
2.3.5.1
Diskussion der Lösung
• Die Maxwell-Gleichungen sind die Bewegungsgleichungen für die Felder E und B. Die Struktur der Gleichung ergibt, dass beide Felder gekoppelt sind.
• Es gibt jeweils zwei Gleichungen für E und B, als Konsequenz des Fundamentalsatzes.
• Das Gesamtfeld besteht aus der Summe von wirbelfreien und quellenfreien Anteilen.
• Insgesamt zählt man 8 skalare Gleichungen für 6 Unbekannte Größen (Ex , ..., Bz ). Es stellt sich also die
Frage, ob das Problem überbestimmt ist. Diese Frage wird im Abschnitt der Eichung geklärt werden.
2.3.5.2
Maxwell-Gleichungen im CGS-System
Im CGS-System notieren wir die Gleichungen unter Verwendung von Tabelle (2.1) folgendermaßen:
div E(r, t) = 4πρ(r, t)
1 ∂
rot E(r, t) = −
B(r, t)
c ∂t
div B(r, t) = 0
4π
1 ∂
rot B(r, t) =
j(r, t) +
E(r, t)
c
c ∂t
Zusätzlich benötigen wir physikalische Randbedingungen insbesondere ist zu fordern:
E
B
∂E
∂t
lim
=0
∂
|r|→∞
∂t B
∂
∂r E
∂
∂r B
Das ergibt sich aus der Endlichkeit von Energie und Impuls des elektromagnetischen Feldes.