4 Grundlagen elektromechanischer - antriebstechnik.fh
Werbung

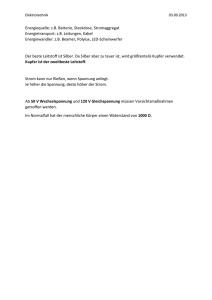
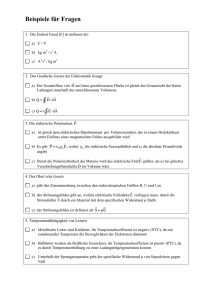
4. Grundslagen elektromechanischer Energiewandler Seite 1 4 Grundlagen elektromechanischer Energiewandler Zu den elektromechanischen Energiewandlern werden alle Einrichtungen gezählt mit der elektrische Energie (Spannung, Strom) in mechanische Energie (Drehmoment / Kraft, Drehzahl / Geschwindigkeit) gewandelt werden kann. Die Krafterzeugung kann auf direktem Wege mit Hilfe • elektrischer Felder (Ladungen zwischen Kondensatorplatten) oder • magnetischer Felder (stromführender Leiter im Magnetfeld, ferromagnetische oder dauermagnetische Materialien) erfolgen aber auch indirekt (Stromwärme in einem Bimetall, elektrisch erzeugte chemische Reaktion zur Druckerzeugung, Pumpen für Hydraulik und Pneumatik, ...) Bild 4.1: Prinzip der Krafterzeugung mit Hilfe eines elektromagnetischen Feldes. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 2 Elektrische Feldkräfte werden z. B. in elektrostatischen Mikrofonen und Lautsprechern, Piezoaktoren, "elektrischen" Feuerzeugen, etc. ausgenutzt. Magnetische Feldkräfte finden Verwendung in Spannungs-, Strom-, und Leistungsmessern, Energiezählern, Lautsprechern und Mikrofonen, elektrische Maschinen, etc. Die Energiewandlung ist im Allgemeinen umkehrbar (Bild 4.2). Bild 4.2: Energiewandler im Motor- und Generatorbetrieb. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 3 Der entscheidende Grund für die weitaus größere Verbreitung elektromagnetischer Wandler ist deren wesentlich höheren Energiedichten: Die spezifische Energiedichte des elektrischen Feldes: 1 (4.1) we = εE 2 2 F , In Luft: ε = ε 0 = 8.854 ⋅ 10 −12 m die maximale Feldstärke, die Durchschlagsfrei in Luft (Luftspalt eines Energiewandlers) erreichbar ist, beträgt: Emax ≈ 10kV/cm , Ws damit: . w e = 4.5 ⋅ 10 −6 cm3 Die spezifische Energiedichte des magnetischen Feldes: 1 2 (4.2) wm = B 2µ −7 In Luft: µ = µ0 = 4π ⋅ 10 , die maximale Flussdichte, die in Luftspalten von Energiewandlern erreichbar sind (ohne Supraleitung), beträgt: Bmax ≈ 1T , damit: w m = 0.4 Ws . cm3 Die Energiedichte des magnetischen Feldes ist ca. um den Faktor 105 größer! Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 4 Inhalt: 2 Elektromechanische Energiewandler ...................................................................................................... 1 2.1 Physikalische Grundlagen ............................................................................................................. 5 2.1.1 Magnetische Flussdichte ..................................................................................................... 5 2.1.2 Permeabilität........................................................................................................................ 6 2.1.3 Durchflutungsgesetz ............................................................................................................ 7 2.1.4 Der magnetische Kreis ........................................................................................................ 8 2.1.5 Induktionsgesetz:............................................................................................................... 11 2.1.6 Induktivitäten...................................................................................................................... 12 2.1.7 Kraftberechnung ................................................................................................................ 14 2.1.8 Bauvolumen und Ausnutzung............................................................................................ 15 2.1.9 Übung Bauvolumen ........................................................................................................... 17 2.2 Grundsätzlicher Aufbau und Werkstoffe ...................................................................................... 18 2.2.1 Anker ................................................................................................................................. 18 2.2.2 Felder................................................................................................................................. 20 2.2.3 Elektrisch leitende Werkstoffe ........................................................................................... 21 2.2.4 Magnetisch leitende Werkstoffe......................................................................................... 24 2.2.5 Permanentmagnete ........................................................................................................... 27 2.2.6 Passive Bauteile ................................................................................................................ 29 2.3 Normung elektrischer Maschinen ................................................................................................ 30 2.3.1 Leistungsschilder ............................................................................................................... 30 2.3.2 Bauformen ......................................................................................................................... 33 2.3.3 Schutzarten........................................................................................................................ 36 2.3.4 Übertemperaturen und Isolierstoffklassen [3] .................................................................... 39 2.3.5 Betriebsarten [9, 5, 2] ........................................................................................................ 41 2.3.6 Übung Erwärmung, Isolierstoffklassen und Betriebsarten................................................. 48 2.3.7 Übung "Lastspiel" .............................................................................................................. 49 Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.1 Seite 5 Physikalische Grundlagen 4.1.1 Magnetische Flussdichte Das magnetische Feld ist quellenfrei: ! ! B " ∫∫ ⋅ dA = 0 (4.3) ! ! mit der Flussdichte (Induktion) B . Der zugehörige magnetische Fluss Φ der aus einer Teilfläche Aν von Gleichung (4.3) austritt, berechnet sich aus ! ! (4.4) Φν = ∫∫ B ⋅ dAν und es ergibt sich ∑Φ ν ν =0 (4.5) Bild 4.3: Flussröhren des magnetischen Feldes. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 6 4.1.2 Permeabilität ! ! Der Zusammenhang zwischen der magnetischen Flussdichte B und der magnetischen Feldstärke H wird durch die magnetischen Eigenschaften des Werkstoffes ! !definiert: (4.6) B = µH . Der Faktor µ wird als Permeabilität bezeichnet. Im Vakuum (näherungsweise auch in Luft) ist die Permeabilität eine universelle Naturkonstante mit dem Wert µ = µ0 = 4π 10 −7 Vs/Am . (4.7) Allgemein gilt µ = µ 0 µr , (4.8) wobei die relative Permeabilität µr den Magnetisierungszustand des Materials (ferromagnetisch, permanentmagnetisch) repräsentiert. Die Permeabilität µr ist also eine Funktion der ! ! Feldgrößen B und H . Entsprechende Kennlinien werden als Magnetisierungskennlinien (Bild 4.4)bezeichnet. Bild 4.4: Magnetisierungskennlinien von Eisen. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.1.3 Durchflutungsgesetz "Das Umlaufintegral über die magnetische Feldstärke ! ! ist !gleich ! dem eingeschlossenen Strom." #∫ H ds = ∫∫ J dA , ! J : Stromdichte Seite 7 (4.9) Bei der Berechnung elektrischer Maschinen wird die rechte ! ! Seite von (4.9) häufig als Durchflutung Θ = ∫∫ J dA (4.10) und die linke Seite als magnetische Umlaufspannung ! ! V0 = #∫ H ds (4.11) bezeichnet. Das Linienintegral in (4.11) lässt sich in eine Summe einzelner Teilstrecken zerlegen. Die magnetische Spannung der Teilstrecke zwischen a und b bezeichnet den magnetischer Spannungsabfall b ! ! (4.12) Vab = ∫ H ds . a Bei Spulen mit w Windungen und einem Strom I Bild 4.5 ergibt sich die Gesamtdurchflutung ("Amperewindungen") zu Bild 4.5: Beispiel für das Durchflutungsgesetz bei diskreten Stromleitern. Fachhochschule Düsseldorf FB 3 V0 = Θ = Iw . Elektrische Maschinen und Antriebe (4.13) Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 8 4.1.4 Der magnetische Kreis Die Anwendung des magnetischen Kreises beschränkt sich heute im Wesentlichen auf überschlägige Berechnungen der magnetischen Verhältnisse in einer elektromagnetischen Anordnung (z. B. elektrische Maschine). Für genaue Untersuchungen sollten immer numerische Feldberechnungsprogramme (Finite Elemente) eingesetzt werden, die in der Lage sind, die elektromagnetischen Gegebenheiten sehr exakt nachzubilden (siehe Vorlesung "Feldberechnung"). Bild 4.6: Ersatzschaltbild eines magnetischen Kreises In Bild 4.6 ist ein einfacher magnetischer Kreis dargestellt, bestehend aus einem Eisenjoch mit Luftspalt und einer Spule. Die Gesamtdurchflutung Θ = Iw (Einheit A) entspricht im Ersatzschaltbild einer Spannungsquelle. Der magnetische Fluss Φ (Einheit Vs) entspricht im Ersatzschaltbild einem Strom. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 9 Unter der Annahme einer gleichmäßigen Verteilung der Flussdichte Bν über der Querschnittsfläche Aν im Teilstück ν ergibt sich aus (4.3) Φ = Bν Aν . (4.14) Der magnetische Spannungsabfall an einem Teilstück ν des magnetischen Kreises mit der Länge lν berechnet sich aus (4.12) näherungsweise zu (4.15) Vν = Hν lν Hieraus lassen sich die magnetischen Widerstände Rm formal über das "Ohmsche Gesetz" einführen: V Hl l Rmν = ν = ν ν = ν (4.16) Φ Bν Aν µν Aν Die Permeabilität wird wegen der Analogie häufig als spezifische magnetische Leitfähigkeit bezeichnet. In dem einfachen magnetischen Kreis aus Bild 4.6 ergibt sich für das Joch (Eisenpermeabilität µFe , Länge l Rm1 = 1 , l1 ) µFe A1 für den Luftspalt (Permeabilität µ0 , Länge δ ): Rm2 = δ . µ 0 A2 Insbesondere die Fläche, durch die der Fluss im Luftspalt strömt, ist nur sehr ungenau zu bestimmen. Meist wird die Fläche der Eisenwege zu Grunde gelegt. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 10 Der Spannungsumlauf ergibt für den magnetischen Spannungsabfall am Luftspalt V2 = Θ − V1 = Iw − Φ Rm1 und für den Fluss Φ= Θ . Rm1 + Rm2 Eingesetzt erhält man Rm2 V2 = Iw , R R + m1 m2 bzw. für die magnetische Feldstärke Hδ im Luftspalt Hδ = V2 Iw Rm2 . = δ δ Rm1 + Rm2 (4.17) Häufig kann für überschlägige Berechnungen der Spannungsabfall im Eisen wegen der hohen Permeabilität ( µFe → ∞, Rm1 → 0 ) vernachlässigt werden, und es ergibt sich die wichtige Beziehung: Hδ = Fachhochschule Düsseldorf FB 3 Iw . δ Elektrische Maschinen und Antriebe (4.18) Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 11 4.1.5 Induktionsgesetz: Das Induktionsgesetz stellt einen Zusammenhang zwischen elektrischem Feld (elektrische Spannung) und magnetischem Fluss her. In allgemeiner Form gilt ! ! ! ! d (4.19) E d s = − B dA . #∫ dt ∫∫ Das Linienintegral auf der linken Seite muss über den Rand der Fläche A integriert werden (Bild 4.7). Sowohl die Flussdichte als auch die aufgespannte Fläche können Funktionen der Zeit sein und sind deshalb bei der Differenziation zu berücksichtigen Folgende Abkürzungen werden eingeführt: induzierte Spannung ! ! e = #∫ E ds , Flussverkettung Bild 4.7: Festlegung der Zählpfeile für e und Ψ e=− Damit: dΨ . dt ! ! Ψ = ∫∫ B dA . (4.20) (4.21) (4.22) Der Spannungsumlauf in Bild 4.7 e = −u + Ri ergibt mit (4.22) als Spannungsgleichung für eine Leiterschleife (Spule) dΨ . (4.23) u = Ri + dt Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 12 4.1.6 Induktivitäten Zwischen dem Strom i1 einer Spule (Leiterschleife, Wicklung, ...) und dem von ihm selbst erzeugten verketteten Fluss Ψ 11 besteht eine direkte Proportionalität. Der Proportionalitätsfaktor wird als Selbstinduktivität bezeichnet: Ψ 1 = L11i1 (4.24) Für L11 ≠ f (t ) gilt mit (4.22) für die Selbstinduktionsspannung: dΨ 11 di = −L11 1 e1 = − dt dt (4.25) Sind mehrere (n) Stromkreise magnetisch miteinander gekoppelt, so durchflutet der in Kreis k durch den Strom i k erzeugte Fluss auch die Leiterschleife i. Der Proportionalitätsfaktor zwischen dem mit der Leiterschleife i verketteten Fluss und den verursachenden Strom im Kreis k nennt man Gegeninduktivität Lik , (oder Mik ). Ein System mit n magnetisch gekoppelten Stromkreisen lässt sich demnach wie folgt anschreiben: L11 L12 . . . L1n i1 ψ1 L21 L22 ψ2 . . . = . . . . . . Ln1 Ln2 ψn . . L2n . . . . . i2 ⋅ . . . . Lnn in Lik = Lki . mit Fachhochschule Düsseldorf . FB 3 Elektrische Maschinen und Antriebe (4.26) (4.27) Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 13 Bild 4.8: Zur Definition von Streufluss (Φσ ) und verketteten Fluss(Φ11,Φ12 ) In elektrischen Maschinen wird häufig zwischen Nutzfluss oder Hauptfluss (verkettet, drehmomentbildend) und dem Streufluss Φ σ = Φ 11 − Φ 21 unterschieden (Bild 4.8) Zwischen dem magnetischen Fluss Φ und dem mit einer Spule verketteten Fluss Ψ wird bei der Berechnung elektrischer Maschinen meist ein Zusammenhang hergeleitet der Form Ψ = wCgk WΦ . (4.28) Die Windungszahl w berücksichtigt das mehrfache "Umschlingen" (verketten) des Flusses durch die Windungen der Spule, Der Geometriefaktor Cg beschreibt den Einfluss der räumlichen Anordnung des Eisens und der Wicklungsfaktor k W (<1) den Einfluss der räumlichen Anordnung und der Verschaltung der Spulen in der Maschine. Bei sehr einfachen Anordnungen (z.B. Luftspule mit konzentrierten Windungen) ergibt Ψ = wΦ (4.29) sich näherungsweise Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 14 4.1.7 Kraftberechnung Auf einen stromdurchflossenen Leiten im Magnetfeld wirkt ! ! ! die sogenannte Lorentz-Kraft: (4.30) F = I (l × B ) ! wobei l die Richtung des Stromes I definiert. Liegt der Leiterstab auf dem Außendurchmesser des Rotors einer elektrischen Maschine , so ergibt sich vereinfacht für die Tangentialkraft (4.31) F = B ⋅l ⋅I . Unter der Annahme einer gleichmäßig verteilten Flussdichte berechnet sich mit (4.4) der Fluss zu ( d : Rotordurchmesser) Φ = BA = Bπ d l . Und (4.31) geht über in Φ F= I πd Bei insgesamt z gleichmäßig verteilten Stromleitern am Umfang Bild 4.9 Stromleiter auf dem Läufer summiert sich die Kraft zu Φ eine Maschine mit dem LuftspaltF= zI . (4.32) πd fluss B . Über den Hebelarm d 2 kann das an der Welle wirksame Drehmoment berechnet werden: d z ΦI M =F = (4.33) 2 2π Grundsätzlich gilt in allen rotierenden elektromagnetischen Anordnungen die wichtige Proportionalität zwischen Drehmoment und dem Produkt aus magnetischem Fluss und elektrischem Strom: M ∼ ΦI . Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe (4.34) Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.1.8 Bauvolumen und Ausnutzung Seite 15 Die Ausnutzung eines elektromagnetischen Energiewandlers wird durch die maximal möglich Flussdichte Φ B= (4.35) π dl und den maximal möglichen sogenannten Strombelag zI α= (4.36) πd begrenzt. Während die Flussdichte wegen der Eisensättigung im Luftspalt auf maximal 1T begrenzt ist, hängt der maximale Strombelag von der verwendeten Kühlung ab und liegt in einer Größenordnung zwischen 100A/cm bei großen Maschinen und 500A/cm bei kleinen Maschinen. Setzt man (4.35) und (4.36) in (4.34) ein, so erhält man für das Drehmoment: M ~ α Bd 2l und für die zugehörige mechanische Leistung P ~ α Bd 2l ⋅ n . d 2l ∼ Rotorvolumen (Bohrungsvolumen) (4.37) (4.38) Das Bohrungsvolumen und damit die Baugröße einer Maschine ist durch das Drehmoment gegeben! Als Proportionalitätsfaktor zwischen Bohrungsvolumen und Drehmoment wird die sogenannte Ausnutzungsziffer, Leistungszahl oder auch Essonsche Zahl C eingeführt: (4.39) M = C ⋅ d 2l Je höher die Ausnutzungsziffer desto höher die Leistungsdichte der Maschine. Dies kann innerhalb einer Technologie nur durch Verbesserung von Wirkungsgrad und Kühlung erreicht werden. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 16 In der Literatur wird C meist in den angepassten Einheiten kW min m3 angegeben. Bild 4.10: Ausnutzungszahl von Gleichstrommaschinen. Bild 4.11: Ausnutzungszahl von Asynchronmaschinen. Bild 4.12: Ausnutzungszahl von Synchronmaschinen. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 17 Bild 4.13: Größenvergleich von rotierenden elektrischen Maschinen bei konstantem Drehmoment und konstanter Leistung. 4.1.9 Übung Bauvolumen Es ist eine Maschine zu projektieren, die bei n = 3000min-1 eine Bemessungsleistung von 200kW abgibt. Aus mechanischen Gründen ist die Bohrungslänge auf maximal l = 2d begrenzt. Legen Sie das notwendige Bohrungsvolumen und den Durchmesser des Läufers fest und zwar für eine Ausführung als Gleichstrommaschine, Asynchronmaschine und Synchronmaschine Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.2 Seite 18 Grundsätzlicher Aufbau und Werkstoffe Ein elektromechanischer Energiewandler (elektrische Maschine) besteht grundsätzlich aus • Ständer (Stator) und • Läufer (Rotor). Zwischen Ständer und Läufer ist immer ein Luftspalt vorhanden, der im Wesentlichen den Magnetischen Kreis bestimmt. Sowohl Ständer als auch Läufer tragen immer einen aktiven magnetischen Pol (Spule, Magnet), oder zumindest eine magnetische Unsymmetrie (Reluktanz) 4.2.1 Anker Damit eine kontinuierliche Bewegung stattfinden kann, muss mindestens eines der beiden Bauteile ein magnetisches Feld erzeugen, das sich bezüglich des erzeugenden Bauteils kontinuierlich bewegt. Solche Bauteile werden häufig als Anker bezeichnet. Der Anker einer Gleichstrommaschine besitzt einen mechanischen Schalter, der die Position der stromführenden Spulen verschiebt (Bild 4.14). Der elektronisch kommutierende Motor (Servomotor) erreicht dies mit Hilfe elektroniBild 4.14: Anker einer kleinen Gleichstrommaschine (Uni- scher Schalter (Transistoren, Bild 4.15). versalmotor) Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Bild 4.15: Prinzipbild eines permanenterregten SynchronServomotors (elektronisch kommutierter Motor) Seite 19 Bild 4.16: Ständer eines kleinen Asynchronoder Synchronmotors. Die Synchronmaschine und die Asynchronmaschine besitzen Anker mit sogenannten Drehfeldwicklungen (Bild 4.16), die, eine geeignete Speisung vorausgesetzt, ein kontinuierliches Drehfeld erzeugen. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 20 4.2.2 Felder Als Felder werden die aktiven Bauteile bezeichnet, deren magnetisches Feld sich nicht gegenüber dem erzeugenden Bauteil bewegt. Dies können konzentriert um einen Eisenpol gewickelte Spulen (Bild 4.17) sein, Permanentmagnete (Bild 4.18) oder auch nur magnetische Unsymmetrien (Bild 4.19). Bild 4.17: Elektrisch erregte Felder eines Universalmotors (Handgeführte Elektrogeräte, Bohrmaschine, Staubsauger, ). Bild 4.18: Permanent erregte Felder von Gleichstrommotoren (links) und Synchronmotoren (rechts). Bild 4.19: "Feld" eines geschalteten Reluktanzmotors. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.2.3 Elektrisch leitende Werkstoffe Seite 21 In Wicklungen einer Maschine wird zur Minimierung der Verluste Leitermaterial mit möglichst geringen Widerstand gewählt, also Kupfer mit einer Leitfähigkeit von ca. κ ≈ 57 ⋅ 106 S m und einem spezifischen Widerstand von ρ ≈ 1.75 ⋅ 10−8 Ωm. Der Temperaturkoeffizient des spezifischen Widerstandes von Kupfer bei 20 °C beträgt 3.93 ⋅ 10 −3 1 K . Bei einer mittleren Temperaturerhöhung der Wicklung um 10 K erhöht sich der Widerstand der Wicklung und damit auch die Kupferverluste um ca. 4%. Bei kleinen Maschinen bestehen die Wicklungen meist aus rundem mit einer Lackisolation versehenen Kupferdraht. Sie werden maschinell gewickelt, geformt und verschaltet Bild 4.20). Bild 4.20: Kupferwicklung im Blechpaket eines kleinen Drehfeldständers. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 22 Wicklungen großer Maschinen werden aus einzeln isolierte Kupferstäbe mit quadratischen oder rechteckigen Querschnitt aufgebaut (Bild 4.21). Die Spulen werden außerhalb der Maschine geformt und komplett isoliert ("Formspulen"). Bild 4.21: Isolierte Kupferstäbe in der Nut einer großen Maschine (links), Formspule (rechts). Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 23 Eine wichtige Ausnahme stellt der sogenannte Kurzschlusskäfigläufer einer Induktionsmaschine (Asynchronmaschine) dar. Er besteht aus einzelnen, in das Blechpaket eingelassenen Stableitern, die an beiden Enden des Läufers kurzgeschlossen werden (Bild 4.22). Betrachtet man den Käfig alleine, so ergibt sich die Form des Laufrades eines Hamsterkäfigs. Daher auch die englische Bezeichnung "Squirrel Cage Induction Motor". Bild 4.22: Gegossene Käfigwicklung eines Asynchronmotors, Eisenkern weggeätzt. Der Käfig besteht bei o Kleinen und mittlere Maschinen: Aluminium Druckguss (κ ≈ 33 ⋅ 106 S m ), für hohes Anlaufmoment mit Silizium legiertes Aluminium ("Ugal") mit κ ≈ 15 ⋅ 106 S m , Temperaturkoeffizient wie Kupfer. o Große Maschinen: Kupfer-Profilstäbe, hartverlötet, bzw. Bronze (Cu-Zinn) oder Messing (Cu-Zink) bei hohen Anlaufmomenten. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.2.4 Magnetisch leitende Werkstoffe Seite 24 Magnetisch gut leitfähige ferromagnetische Werkstoffe sind im Allgemeinen auch elektrisch leitfähig. Aus diesem Grund werden in Gebieten mit zeitlich veränderlichen magnetischen Feldern die Bauteile aus gegeneinander isolierten Blechen (Dynamoblech) aufgebaut, die zu sogenannten Blechpaketen gestapelt werden (Bild 4.23). Sind ausschließlich zeitlich konstante magnetische Felder vorhanden, können die Eisengebiete auch massiv ausgeführt werden (z. B. als Rückschluss von Permanentmagneten Bild 4.18). Bild 4.23: Blechpaket eines kleinen Drehfeldständers mit eingelegter Nutisolation. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 25 Der Proportionalitätsfaktor (Permeabilität) µ = µ0 µr zwischen der magnetischen Flussdichte B und der dazu erforderlichen magnetischen Feldstärke H ist nichtlinear (Bild 4.24). Er wird durch Magnetisierungskennlinien dargestellt. Bei kleinen Feldstärken erreicht die relative Permeabilität einen Wert von ca. 5000 und strebt für große Feldstärken gegen 1. 2,5 2,0 B[T] 1,5 1,0 0,5 0,0 0 10000 20000 30000 H[A/m] Fachhochschule Düsseldorf FB 3 40000 50000 Bild 4.24: Magnetisierungskennlinie für das Dynamoblech "M270-50A". Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 26 Die Zugabe von Silizium verringert die elektrische Leitfähigkeit und damit die aufgrund der magnetischen Wechselfelder entstehenden Wirbelstrom und Hytereseverluste (Eisenverluste). Die Verlustziffern geben die spezifischen Eisenverluste bei einer Frequenz von 50Hz und einer Flussdichte von 1T ( v Fe,10 ), bzw. 1.5T ( v Fe,15 ) in W/kg an. Sie lassen sich aufteilen in • Hystereseverluste: v H ~ f ⋅ B 2 und • Wirbelstromverluste: v w ~ f 2 ⋅ B 2 . Damit ergeben sich die spezifischen Eisenverluste zu v Fe = v H + v W = cHfB 2 + c w f 2B 2 , (4.40) und die Gesamtverluste im Eisen der Maschine: PFe = mFe ⋅ v Fe ⋅ kB (4.41) mit kB als Bearbeitungsfaktor und mFe : Masse des Blechpakets. kB ≈ 1.3 bei mittleren und großen Maschinen, kB ≈ 2...4 bei kleinen Maschinen. Ist nur eine Gesamtverlustziffer angegeben, so lassen sich die Eisenverluste grob mit 2 1.6 B f PFe ≈ mFev Fe,15 1.5T 50Hz kB (4.42) berechnen. Gleichung (4.42) ist nur anwendbar, wenn die Maschine sich im Rahmen des "Üblichen" (≈50Hz, ≈1.5T) bewegt! Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 27 4.2.5 Permanentmagnete Permanentmagnete dienen zur verlustfreien Erzeugung von magnetischen Feldern. Sie werden meist im Kleinmaschinenbau eingesetzt. Bild 4.25: Entwicklung der Energiedichte von Permanentmagnete seit 1900. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 28 In technischen Systemen ist in erster Linie der zweite Quadrant der Hysteresekurve von Interesse. Dieser Bereich stellt die Abnahme der Flussdichte im Magneten mit zunehmender Gegenfeldstärke dar. ⇒ Entmagnetisierungskurven • AlNiCo hat wegen der geringen Feldstärken im Elektromaschinenbau weitgehend an Bedeutung verloren. • Ferrit wird in Low-Cost Anwendungen in großen Stückzahlen eingesetzt. • SmCo (Selten-Erden) ist sehr teuer, es wird heute nur noch in extremen Anwendungen eingesetzt, z.B. bei hohen Temperaturen • NdFeB (Selten-Erden) hat ähnliche Entmagnetisierungskurven wie SmCo, ist jedoch deutlich kostengünstiger und hat SmCo in üblichen Servoantrieben weitgehend verdrängt. NdFeB ist weniger temperaturstabil als SmCo. Bild 4.26: Entmagnetisierungskurven von Permanentmagneten Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.2.6 Passive Bauteile Seite 29 Bild 4.27: Typische Bauteile einer elektrischen Maschine Zu den elektromagnetisch passiven Bauteilen einer elektrischen Maschine (Bild 4.27) zählen: Lagerschild (3 und 4) aus Aluminium- oder Stahlguss, teilweise Blech; Kugellager; Lüfter (5) aus Kunststoff oder Stahlblech; Lüfterhaube (6) aus Kunststoff oder Stahlblech; Gehäuse (1) aus Aluminium- oder Stahlguss, Welle (2) aus Stahl mit Rotorkörper, Klemmkasten (7) aus Kunststoff oder Aluminium mit Klemmbrett aus Kunststoff oder Porzellan. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.3 Seite 30 Normung elektrischer Maschinen Wegen der langen Geschichte und der großen Verbreitung unterliegen elektrische Maschinen einer weitgehenden Normung. Ausgehend von der deutschen VDE-Norm 0530 für drehende elektrische Maschinen wurde die international gültige Norm IEC 34 entwickelt und im Rahmen der europäischen Harmonisierung die Europa-Norm EN60034. Alle Normen sind inhaltlich weitgehend identisch. 4.3.1 Leistungsschilder Leistungsschilder dienen zur Identifizierung und Beschreibung aller für den Bemessungsbetrieb wichtigen Daten. Die Form des Leistungsschildes ist in DIN 40710 festgelegt. Feld 1 2 3 4 5 6 7 8 Erklärung Firmenbezeichnung Typenbezeichnung der Maschine Stromart (-: Gleich-; ~: Wechsel; 3~:Drehstrom) Arbeitsweise (Mot. Motor; Gen: Generator) Fertigungs- oder Reihennummer Schaltart der Ständerwicklung bei Synchron- oder Asynchronmaschinen: Schaltz. Benennung |; ⊥ Einphasensystem: ohne; mit Hilfsphase Zweiphasens.: ohne; mit Verkettung |2 ; % Dreiphasens.: unverkettet; Dreieckschal∨ tung; Sternschaltung; Sternsch. Mit aus|||; ∆; Y; | gef. Sternpunkt Bemessungsspannung Bemessungsstrom Fachhochschule Düsseldorf FB 3 Bild 4.28: Leistungsschild einer elektrischen Maschine nach DIN 40710. Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 31 Feld Erklärung 9 Bemessungsleistung: Wirkleistung bei sämtlichen Motoren sowie bei Gleichstrom oder Asynchrongeneratoren, Scheinleistung bei Synchrongeneratoren und Blindleistungsmaschinen 10 Kurzzeichen W oder kW, bzw. VA oder kVA 11 Betriebsart (Abschnitt 4.3.5) 12 Leistungsfaktor cos ϕ im Bemessungsbetrieb, bei Synchronoder Blindleistungsmaschinen, die induktive Blindleistung aufnehmen sollen, ist das Kurzzeichen u hinzuzufügen. 13 Drehrichtung: → : Rechtslauf; ← : Linkslauf (Antriebsseite) 14 Bemessungsdrehzahl 15 Bemessungsfrequenz 16 Das Wort Erregung (Err.) bei Gleichstrom und Synchronmaschinen, das Wort Läufer (Lfr.) bei Asynchronmaschinen 17 Schaltzeichen der Läuferwicklung, wenn keine DreiphasenBild 4.29: Beispiel für das Leiswicklung vorliegt (Vergl. Feld 6) tungsschild eines Gleichstrom18 Bei Gleich- oder Synchronmaschinen: Erregerspannung; bei motors. Asynchronmaschinen Läuferstillstandsspannung 19 Bei Gleich- oder Synchronmaschinen: Erregerstrom; bei Asynchronmaschinen Läuferstrom im Bemessungsbetrieb 20 Isolierstoffklasse (Abschnitt 4.3.4) 21 Schutzart (Abschnitt 4.3.3) Angenähertes Gewicht in t, nur bei Maschinen mit einem Ge22 wicht von über 1 t 23 Zusätzliche Vermerke (z. B. VDE 0530/ ... mit Jahreszahl) Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Gewährleistung für Wirkungsgrad Einzelverlustverfahren Gesamtverlustverfahren Seite 32 Toleranz -10% von (1 − η ) -15% von (1 − η ), mindestens 0,7% Leistungsfaktor ± 1 6 von (1 − cos ϕ ); min: 0,02; max: 0,07 P < 0,67kW ±15% Drehzahl Gleichstrommotoren im Nebenschluss oder 0,67kW ≤ P < 2,5kW ±10% fremderregt 2,5kW ≤ P < 10kW ±7,5% 10kW ≤ P ±5% P < 0,67kW ±20% 0,67kW ≤ P < 2,5kW ±15% Gleichstrommotoren in -Reihen oder Doppel- 2,5kW ≤ P < 10kW ±10% schlusswicklung ±7,5% 10kW ≤ P Schlupf bei Induktionsmotoren ±20% des Sollschlupfes Anzugsstrom bei Käfigläufern +20% Anzugsmoment von Induktionsmotoren -15% bis +25% Kippmoment bei Induktionsmotoren -10%, mindestens 1,6faches Bemessungsmoment Trägheitsmoment ±10% Tabelle 4.1: Zulässige Toleranzen der Herstellerangaben nach VDE 0530 bei Bemessungsleistung im betriebswarmen Zustand: Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 FB 3 Elektrische Maschinen und Antriebe 4. Grundslagen elektromechanischer Energiewandler Fachhochschule Düsseldorf 4.3.2 Bauformen Die Bauformen elektrischer Maschinen wurde bis 1971 in der DIN 42950 geregelt. Der heute im Allgemeinen verwendete "Code 1" ist in der EN60034-7 (IEC 34-7, VDE 0530-7) genormt. Der systematische "Code 2" konnte sich bisher noch nicht durchsetzen. Seite 33 Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 FB 3 Elektrische Maschinen und Antriebe 4. Grundslagen elektromechanischer Energiewandler Fachhochschule Düsseldorf Seite 34 Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 FB 3 Elektrische Maschinen und Antriebe 4. Grundslagen elektromechanischer Energiewandler Fachhochschule Düsseldorf Seite 35 Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 Tabelle 4.2: Bauformen elektrischer Maschinen (Quelle: Druckschrift SD496 der Firma Danfoss-Bauer, Esslingen). FB 3 Elektrische Maschinen und Antriebe 4. Grundslagen elektromechanischer Energiewandler Fachhochschule Düsseldorf 4.3.3 Schutzarten Die Schutzarten elektrischer Maschinen sind in Anlehnung an die Schutzarten elektrischer Betriebsmittel in der EN 600034-5 (IEC 34-5, VDE0530-5, Anhang A) Häufig verwendete Schutzarten sind: • IP00, IP40: Einbaumotoren • IP23: Gehäusemotoren mit belüfteter Wicklung • IP54: geschlossenen Gehäusemotoren • IP65: Servotechnik (IP6x ist nicht Bestandteil obiger Normen) Seite 36 Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 FB 3 Elektrische Maschinen und Antriebe 4. Grundslagen elektromechanischer Energiewandler Fachhochschule Düsseldorf Seite 37 Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 FB 3 Elektrische Maschinen und Antriebe 4. Grundslagen elektromechanischer Energiewandler Fachhochschule Düsseldorf Seite 38 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 Prof. Dr. R. Gottkehaskamp Tabelle 4.3: Schutzarten elektrischer Maschinen (Quelle: Druckschrift SD496 der Firma Danfoss-Bauer, Esslingen). 4. Grundslagen elektromechanischer Energiewandler Seite 39 4.3.4 Übertemperaturen und Isolierstoffklassen [3] Die Verluste in einer elektrischen Maschine werden grundsätzlich in Wärme umgesetzt. Für Wicklungen und Konstruktionsteile wurden deshalb in der EN 60034-1 (IEC 34-1, VDE 0530-1) Grenzübertemperaturen nach Tabelle 4.4) festgelegt. Sofern nichts anderes vereinbart wird, beziehen sich die Übertemperaturen auf eine Kühlmitteltemperatur (Umgebungstemperatur) von 40°C. Zulässige Übertemperaturen von Isolationsmaterial sind in Isolierstoffklassen (A, E, B, F, H, C) eingeteilt, üblich ist Klasse F. Wicklungen mit Isolierung nach Klasse Alle Wicklungen (außer einlagige Feldwicklungen) Einlagige Feldwicklungen allgemein Eisenkerne ohne Wicklungsberührung Eisenkerne mit eingebetteten Wicklungen mit Ausdehnungsthermometer gemessen Kommutatoren mit elektr. Thermometer gemessen mit üblichen Fetten Lager mit Sonderfetten A E B F H C 60 K 75 K 80 K 100 K 125 K >125 K 65 K 80 K 90 K 100 K 125 K >125 K Die Temperatur darf benachbarte Konstruktionsteile und Wicklungen nicht gefährden. wie die Wicklungen 60 K 70 K 45 K 55 K Die Temperatur darf benachbarte Konstruktionsteile Alle anderen Teile und Wicklungen nicht gefährden. Tabelle 4.4: Grenzübertemperaturen und Isolierstoffklassen [3]. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 40 Eine besonders einfache und häufig angewendete Methode zur Ermittlung der Übertemperatur ∆ϑ von Kupferwicklungen ist die Messung der Widerstandszunahme gemäß EN 60034: R − R1 (235 + ϑ1 ) + (ϑ1 − ϑK ) ∆ϑ = ϑ2 − ϑK = 2 (4.43) R1 mit ϑ2 : Temperatur der Wicklung am Ende der Messung, ϑK : Kühlmitteltemperatur am Ende der Messung, R2 : Widerstand am Ende der Messung, R1 : Widerstand am Anfang der Messung und ϑ1 : Temperatur am Anfang der Messung. Der Wert 235 ergibt sich aus dem Kehrwert des Temperaturkoeffizienten für Kupfer bei 0 °C. Bei einem Temperaturzuwachs von 10 K halbiert sich die Lebensdauer von Isolation und Kugellager (Regel von Montesinger, Bild 4.30)! Elektrische Maschinen sind wie die meisten elektrischen Betriebsmittel auf eine Nennlebensdauer von 20000 h ausgelegt. Bild 4.30: Regel von Montesinger: Theoretische Lebensdauer als Funktion der Temperatur. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 41 4.3.5 Betriebsarten [9, 5, 2] Die Betriebsarten einer elektrischen Maschine sind in der EN60034-1 (IEC34-1, VDE 0530-1) dargestellt. Sie haben wesentlichen Einfluss auf die Erwärmung und damit die Ausnutzung der Maschine. Die Erwärmung der elektrischen Maschine ist proportional der zugeführten Wärmeenergie, d. h. proportional dem Produkt aus Verlustleistung und Zeit. Die Übertemperatur während der Betriebszeit mit konstanter Verlustleistung PV und gleichmäßiger Verteilung der Verluste (Einkörpermodell) folgt dabei einer e-Funktion (ähnlich dem Aufladen eines Kondensators) ∆ϑ (t ) = ∆ϑ∞ (1 − e t Tb ) (4.44) mit ϑ∞ : Endtemperatur bei genügend langem Betrieb mit der Verlustleistung PV und Tb : Erwärmungszeitkonstante. Nach mehr als drei Zeitkonstanten ist in etwa die Endtemperatur erreicht. Die Abkühlung nach Abschalten der Maschine (Pausenzeit) verläuft ebenfalls nach einer e-Funktion tT ∆ϑ (t ) = ∆ϑ∞ e p (4.45) mit Tp : Abkühlungszeitkonstante. Genaue Darstellungen der Erwärmung, insbesondere das Zweikörpermodell, findet sich in [2]. Die Verlustleistung PV einer elektrischen Maschine lässt sich in • Leerlaufverluste PV0 (Eisenverluste, Reibungsverluste, Erregungsverluste) und • Lastverluste PVb (Wicklungs-(Kupfer-)verluste, Zusatzverluste) aufteilen. Es gilt 2 PV = PV0 + PVb = PV0 + kIeff (4.46) da die Lastverluste wegen der Dominanz der Kupferverluste näherungsweise proportional dem Quadrat des Effektivwertes des Maschinenstromes ist, k : Proportionalitätskonstante. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Bezogen auf die Bemessungswerte ergibt sich: Seite 42 2 PV PV0 + kIeff ∆ϑ∞ . = = 2 ∆ϑ∞N PVN PV0 + kIeff,N (4.47) wobei Drehzahl und Spannung (Maschinenfluss) und damit die Leerlaufverluste als konstant vorausgesetzt wird. Bei Maschinen mit "Nebenschlusscharakteristik" (Gleichstromnebenschlussmaschine, Asynchronmaschine, Synchronmaschine) besteht zudem ein (näherungsweise) linearer Zusammenhang zwischen Drehmoment und Strom, so dass (4.47) erweitert werden kann zu 2 2 PV PV0 + kIeff PV0 + k / Meff ∆ϑ∞ . = = = 2 2 ∆ϑ∞N PVN PV0 + kIeff,N PV0 + k / M eff,N (4.48) Der Effektivwert des Drehmoments kann wie üblich über die Gleichung t M eff 1 S = m(t )2 dt ∫ tS 0 (4.49) berechnet werden mit tS : Betriebsspieldauer (Gesamtbetriebszeit) und m(t ) : zeitlicher Verlauf des Drehmoments. Gleichung (4.49) ist nur gültig, wenn die Erwärmungs- und Abkühlungszeitkonstante in etwa gleich sind (siehe [5])! Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 43 Die Betriebsart S1, auch Dauerbetrieb (DB) genannt zeichnet sich dadurch aus, dass sowohl die Betriebszeit tb als auch die Pausenzeit tp so groß sind, dass der jeweilige stationäre Endwert erreicht wird ( tb > 3Tb , tp > 3Tp ). Die zulässige Wärmebelastung ist ∆ϑ∞ P = V ≤ 1. ∆ϑ∞N PVN (4.50) Der Kurzzeitbetrieb (KB, Betriebsart S2) ist ein Betrieb mit konstanter Leistung, wobei die Belastungsdauer tb < 3Tb ist und der thermische Endzustand nicht erreicht wird (Bild 4.32). Die Pausenzeit tp > 3Tp ist so groß, dass die stationäre Umgebungstemperatur ϑA ( ∆ϑ = 0 ) immer erreicht wird. Die Überlastbarkeit der Maschinen gegenüber der Betriebsart S1 beträgt 1 PV ∆ϑ∞ = = ≥1 (4.51) − tb Tb PVN ∆ϑ∞N 1 − e Bild 4.31: Dauerbetrieb (S1). Die Kennzeichnung erfolgt unter Angabe der Betriebsdauer, z. B. "S2 - 60min". Bild 4.32: Kurzzeitbetrieb (S2). Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Bild 4.33: Aussetzbetrieb (S3). Seite 44 Der Aussetzbetrieb (Betriebsart S3) (Bild 4.33) ähnelt der Betriebsart S2, allerdings wird in der Pausenzeit die Umgebungstemperatur ϑA ( ∆ϑ = 0 ) nicht mehr erreicht. Die Betriebsspieldauer t s = tb + tp ist auf 10 min begrenzt. Damit gilt näherungsweise tb & Tb und tp & Tp , woraus sich für die Überlastbarkeit der Maschine (bezogen auf S1) −( t T + t T ) ∆ϑ∞ 1 − e b b p p PV = = ≥1 (4.52) − tb Tb ∆ϑ∞N PVN 1− e ergibt. Die Kennzeichnung erfolgt unter Angabe der relativen Betriebsdauer (bezogen auf 10 min): S3 – 25%. Der Aussetzschaltbetrieb (Betriebsart S4) ist ein Aussetzbetrieb, bei dem der Anlaufvorgang einen merklichen Einfluss auf die Erwärmung der Maschine hat. Die Kennzeichnung wird gegenüber S3 um das Motorträgheitsmoment und das maximal zulässige externe Trägheitsmoment der Belastungsmaschine ergänzt: S4 – 30% JM = 0,15 kgm2 Jext = 0,7 kgm2 . Bild 4.34: Aussetzschaltbetrieb (S4). Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Bild 4.35: Betriebsart S5. Bild 4.36: Betriebsart S6. Seite 45 Bild 4.37: Betriebsart S7. Der periodische Aussetzbetrieb mit elektrischer Bremsung, Betriebsart S5 (Bild 4.35) erfasst eine periodische Folge identischer Betriebsspiele, bestehen aus Anlauf, konstanter Belastung, elektrischer Bremsung und Pausenzeit mit abgeschalteter Wicklung. Die Kennzeichnung ist identisch mit der von S4. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 46 Im ununterbrochenen periodischem Betrieb, Betriebsart S6 (Bild 4.36) tritt keine Pausenzeit mit stromloser Wicklung auf. Neben der Betriebszeit wird eine Leerlaufzeit tl erfasst, in der die Maschine keine Leistung abgibt, jedoch weiterhin merklich durch die im Allgemeinen geringen Leerlaufverluste erwärmt wird. Die Kennzeichnung wird ergänzt durch die Angabe der relativen Betriebsdauer: S6 – 40%. Der ununterbrochene periodische Betrieb mit elektrischer Bremsung, Betriebsart S7 (Bild 4.37) berücksichtigt zusätzlich zu S6 die Anlauf- und Bremserwärmung. Die Kennzeichnung wird um das Motorträgheitsmoment und das externe Trägheitsmoment der Arbeitsmaschine ergänzt: S7 JM = 2 kgm2 J ext = 18 kgm2 . Im ununterbrochenen periodischem Betrieb mit Lastund Drehzahländerungen, Betriebsart S8 (Bild 4.38) können zusätzlich zu S7 Drehzahl- und Laständerungen innerhalb der Spieldauer t s auftreten. Die Kennzeichnung wird Abgabeleistungen und Drehzahlen innerhalb der stationären Betriebszeiten tb ergänzt: S8 JM = 2 kgm2 J ext = 18 kgm2 16 kW 740 1/min 30% / 40 kW 1460 1/min 30% Bild 4.38: Betriebsart S8. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Bild 4.39: Betriebsart S9. Seite 47 Bild 4.40: Betriebsart S10. Die Betriebsart S9 (Bild 4.39) ist ein ununterbrochener Betrieb mit nichtperiodischen Last und Drehzahländerungen. Es treten häufig Belastungsspitzen auf, die weit über Nennlast liegen können. Der Betrieb mit diskreten konstanten Belastungszuständen, Betriebsart S10 (Bild 4.40) ist eine Aneinanderreihung von maximal vier S1 Betrieben, d.h. es wird in jedem Belastungszustand die zugehörige Endtemperatur erreicht. Die Endtemperatur kann unter Angabe der reduzierten Lebensdauer oberhalb der zulässigen Wicklungstemperatur liegen. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.3.6 Übung Erwärmung, Isolierstoffklassen und Betriebsarten Seite 48 Für eine Antriebsmaschine wurde im Labor eine Erwärmungsmessung mit einer konstanten Abtriebsleistung von P = 200kW durchgeführt. Es ergab sich eine Übertemperatur von ∆ϑ = 100K und eine thermische Erwärmungszeitkonstante von Tb = 1h . Die Zeitkonstante für die Abkühlung betrug 1,5 h. 1. Stellen Sie die Erwärmungskurve zeitlich dar. 2. Welche Isolierstoffklasse hätte gewählt werden müssen, wenn der Motor in der Betriebsart S1 bei einer Leistung von 200kW betrieben werden soll? 3. Geben Sie die Lebensdauer des Isoliersystems für den Betrieb mit 200kW, S1 an. 4. Welche Bemessungsleistung (S1) kann auf dem Leistungsschild angegeben werden, wenn Isoliersysteme der Klassen B, F und H zum Einsatz kommen ( η ≈ konst. )? 5. Für einen speziellen Anwendungsfall wünscht der Kunde eine Lebensdauer des Isoliersystems (Klasse F) von mindestens 40000 h. Mit welcher Maximalleistung darf der Motor betrieben werden? 6. Der Motor ist in Isolierstoffklasse B ausgeführt. Geben sie die maximale Einschaltdauer im KB (S2) an, wenn die Maschine mit 200kW Abgabeleistung betrieben wird. Wie groß ist die minimal notwendige Pausenzeit? 7. Welche Einschaltdauer ergibt sich bei 300KW, Isolierstoffklasse B? Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler 4.3.7 Übung "Lastspiel" Seite 49 Gegeben ist das linksstehende Lastspiel für die Betriebsart S1. a) Welches effektive Moment und welche Auswahlkriterien bezüglich Leistung und Drehmoment ergeben sich hieraus für einen S1Nebenschlussmotor mit einer Bemessungsdrehzahl von nN = 1480U/min ? b) Für das linksstehende S2-Lastspiel ist das effektive Drehmoment zu berechnen. c) Wie groß ist die Überlastbarkeit eines S1 Nebenschlussmotors in diesem Lastspiel? d) Geben Sie das Bemessungsmoment und die Bemessungsleistung des auszuwählenden S1Nebenschlussmotors ( nN = 1480U/min ) an, (Leerlaufverluste sind zu vernachlässigen). e) Zeichnen Sie den Verlauf der Übertemperatur, wenn ein S1-Nebenschlussmotor mit minimale möglicher Bemessungsleistung ausgewählt wurde, ∆ϑ (t = 0) = 0 , Isolationsklasse B. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57 4. Grundslagen elektromechanischer Energiewandler Seite 50 f) Wie groß ist im obigen S3-Betriebsspiel die Überlastbarkeit eines S1-Nebenschlussmotors? g) Was ist neben der Bemessungsleistung für die Auswahl eines S1-Motors zu beachten? h) Die Betriebsspiel betrage 10 min. Die Erwärmungs- und Abkühlungszeitkonstante sind mit 1 h in etwa gleich. Zeichnen Sie den Verlauf der Übertemperatur des Antriebs für den minimal möglichen S1Motor nach f), ∆ϑ (t = 0) = 0 , Isolationsklasse F. Fachhochschule Düsseldorf FB 3 Elektrische Maschinen und Antriebe Prof. Dr. R. Gottkehaskamp 4 Elektromechanische Energiewandler bis 4.3.doc,23.10.00 08:57