Messung des Richt- und Trägheitsmoments
Werbung

Protokoll zum Versuch S3:
Messung des Richt- und Trägheitsmoments
(D∗ und J)
mittels Drehschwingungen
Jan Christoph M
Tobias F
Abgabedatum: 24. April 2007
INHALTSVERZEICHNIS
1
Inhaltsverzeichnis
1 Richt- und Trägheitsmoment bei Drehschwingungen
1.1 Klärung des physikalischen Zusammenhangs . . . . . . . . . . . . . .
1.1.1 Gleichförmige und Gleichförmig Beschleunigte Bewegung . .
1.1.2 Gravitation und die Newtonschen Axiome . . . . . . . . . . .
1.1.3 Trägheitskräfte . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.4 Herleitung des Trägheitsmoments J über die Translation . . .
1.1.5 Translation und Rotation - Zusammenhänge . . . . . . . . . .
1.1.6 Der Steinersche Satz . . . . . . . . . . . . . . . . . . . . . . .
1.1.7 Mathematische Herleitung von J am Beispiel des Vollzylinders
1.2 Versuchsaufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Durchführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Messwerte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Versuch A . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.2 Versuch B . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.3 Versuch C . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Auswertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Versuch A . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.2 Versuch B . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3 Versuch C . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.4 Fehlerbetrachtung und Fehlerrechnung . . . . . . . . . . . . .
1.6 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2
2
2
3
4
5
5
6
7
7
8
9
9
9
9
9
11
11
11
13
2 Literaturverzeichnis
2.1 Quellennachweis . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Bilder und Tabellen . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
14
14
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
1
2
Richt- und Trägheitsmoment bei Drehschwingungen
Das Trägheitsmoment ist eine physikalische Größe, der bei Drehschwingungen von
Körpern eine wesentliche Bedeutung zukommt. Es entspricht der Masse bei einer
geradlinigen Bewegung. Ähnlich schwer wie eine große Masse zu beschleunigen ist,
sind Körper mit großem Trägheitsmoment in Drehung zu versetzen. Das Richtmoment ist das Rotationsäquivalent zur Federkonstante bei der Translation.
1.1
Klärung des physikalischen Zusammenhangs
Als Grundlagen für den Versuch dienen die Prinzipien der gleichförmigen und der
beschleunigten Bewegung bei der Translation. Diese werden für den Versuch der
Drehbewegung auf die Rotation übertragen, da die Rotation in diesem Fall nichts
anderes ist als Translation auf der Kreisbahn.
Des weiteren werden die drei Newtonschen Axiome verwendet, um die Formel für
das Drehmoment J herzuleiten.
1.1.1
Gleichförmige und Gleichförmig Beschleunigte Bewegung
Um die Bewegung von Massepunkten zu verstehen, muss man Ort, Geschwindigkeit
und Beschleunigung in Beziehung zueinander setzen. Die Geschwindigkeit ~v ist die
Ortsänderung ~r˙ über einen Zeitraum ∆t → 0, also
d~r
~r(t + ∆t) − ~r(t)
=
= ~r˙ .
∆t→0
∆t
dt
~v (t) := lim
(1)
Nach demselben Prinzip ist die Beschleunigung ~a als Ableitung der Geschwindigkeit
~v˙ definiert:
~v (t + ∆t) − ~v (t)
d~v
=
= ~v˙ .
∆t→0
∆t
dt
~a(t) := lim
(2)
Insgesamt gilt also
~a =
d~v
d2~r ¨
= ~v˙ =
= ~r .
dt
dt
(3)
In unserem Fallexperiment haben wir es mit einer eindimensionalen Bewegung zu
tun, was eine Betrachtung der reinen Beträge der gemessenen Beschleunigungen
rechtfertigt.
Mit diesen Beziehungen ist es leicht, gleichförmige Bewegung als Bewegung mit
~v = const und gleichförmig beschleunigte Bewegung durch ~a = const zu definieren.
Legt man ein Bezugssystem zu Grunde, in welchem ~x(t = 0) = x0 = 0 und ~v (t =
0) = v0 = 0, so ergibt sich nach einfacher bzw. zweifacher Aufleitung von ~a für die
Geschwindigkeit ~v (t) = ~a · t und für den Ort
1
~x(t) = ~a · t2
2
(4)
[SS05]
1.1.2
Gravitation und die Newtonschen Axiome
Jeder Massepunkt hat ein radiales, konservatives Kraftfeld, welches bewirkt, dass
zwischen allen Massepaaren m, M eine anziehende Kraft wirkt.
Das grundsätzliche Verständnis erfordert nun den Begriff der Kraft. Am brauchbarsten sind die Newtonschen Axiome (nach Sir Isaac Newton, 1642-1727), welche
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
3
die Basisdefinition der Wirkung von Kräften liefern.
Das erste Axiom (Trägheitsprinzip) besagt, dass die Geschwindigkeit ~v eines Körpers konstant ist, wenn die Summe aller Kräfte F~ gleich 0 ist. Das ist im theoretischen Bild mit Massepunkten erst der Fall, wenn sämtliche Massen sich zu einer
einzigen vereint haben, da hier Massen keine Ausdehnung haben. Wenn wir allerdings das Beispiel des freien Falls im Gravitationsfeld betrachten, sehen wir, dass,
solange wir die Verformung der Körper außer Acht lassen, dieses Kräftegleichgewicht
(Equilibrium) eingetreten ist, wenn der sprichwörtliche Apfel die Erde berührt.
Nach dem zweiten Axiom sind Richtung der Kraft F~ und der Beschleunigung
~a gleich, ihr Betrag proportional und der Betrag von Masse und Kraft ebenfalls
proportional, experimental hat Newton ermittelt, dass jenes Verhältnis
F~ ∝ m · ~a
(5)
gilt. Dieses Axiom werden wir im Experiment für ein Massestück und dessen Erdanziehung nachweisen können. Im SI gilt dann sogar F~ = m · ~a.
Das dritte Axiom, auch Actio-Reactio-Prinzip genannt, sagt, dass die Kraft, welche ein Massepunkt A auf den anderen Massepunkt B ausübt, auch von letzterem
auf ersteren Körper wirkt. Also gilt
F~A→B = F~B→A
(6)
Dadurch erst tritt die Gravitation zwischen Erde und den vielfach masseärmeren
Körpern auf ihr ein.
1.1.3
Trägheitskräfte
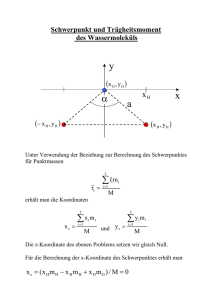
Abb. 1: Rasante Kurvenfahrt [Spi05]
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
4
Trägheitskräfte sind die Folge von Beschleunigungen. Ihre Richtung ist der Beschleunigung entgegengesetzt. Man erkennt Trägheitskräfte nur in einem beschleunigten Bezugssystem; sie sind nur »Scheinkräfte«. Kräfte und Trägheitskräfte als
Ursache und Wirkung ein und derselben Beschleunigung sind stets gleich groß und
entgegengesetzt.
Jeder kennt das Beispiel einer scharfen Kurve oder starken Abbremsung beim Autofahren: Die Insassen fühlen sich beschleunigt, in Wirklichkeit werden sie aber nur
durch ihre Trägheit in einer Bewegung gehalten, die wegen der Zentripetal- bzw.
Bremsbeschleunigung des Wagens nicht mehr möglich ist. Darum rutschen sie im
Extremfall vom Sitz - wenn sie nicht angeschnallt sind (siehe Abb. 1).
1.1.4
Herleitung des Trägheitsmoments J über die Translation
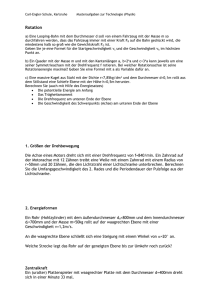
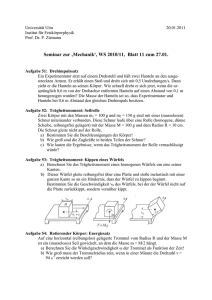
Abb. 2: Skizze zur Rotation [UU05]
Man kann sich zunächst Abb. 2 anschauen, um die Situation zu erkennen.
Zunächst ergibt sich für die Winkelgeschwindigkeit analog zur Translation die Formel
˙
ω
~ = θ~
(7)
θ~ steht für den Drehwinkel. Des weiteren ergibt sich für die zeitliche Änderung der
Winkelgeschwindigkeit die Winkelbeschleunigung
¨
α
~ =ω
~˙ = θ~
(8)
Diese beiden Größen sind im allgemeinen Vektorgrößen. Da eine Kraft an einem äußeren Punkt angreifen muss, um die Scheiben in Bewegung zu setzten, betrachten
wir als nächstes die Tangentialgeschwindigkeit sowie die Tangentialbeschleunigung.
Erstere ergibt sich aus der Multiplikation der Winkelgeschwindigkeit mit dem Radius r.
~vt = r · ω
~
(9)
Des weiteren ergibt sich für die Tangentialbeschleunigung
~at = r · α
~
(10)
Zudem erfährt jeder Massepunkt zusätzlich noch eine Zentripetalbeschleunigung,
die sich durch
a~z = ~r · ω 2
(11)
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
5
darstellen lässt. Um nun auf das eigentliche Trägheitsmoment zu kommen, betrachten wir den Drehimpuls:
~ = p~ · ~r = m · v~t = m · r · ω
L
~
(12)
Aus der Kraft F~ = ~ṗ für die Rotation ergibt sich nun das Drehmoment als zeitliche
Ableitung des Drehimpulses:
~ =L
~˙ = p~˙ · ~r = F~ × ~r
D
(13)
Solange keine Kraft einwirkt, ist M = 0 und L = const. Das Trägheitsmoment
wirkt der durch das Drehmoment verursachten Beschleunigung entgegen. Aus dem
2. Newtonschen Axiom ergibt sich analog zu F~ = m · ~a
~
D
⇐⇒ J
1.1.5
= J ·α
~
~
D
=
α
~
(14)
(15)
Translation und Rotation - Zusammenhänge
Lage
Geschwindigkeit
Beschleunigung
Masse
Kin. Energie
Impuls
Kraft
Bewegungsgleichung
Translation
Ortsvektor ~r
~v = ~r˙
~a = ~v˙ = ~¨r
m
1
2
2 mv
p~ = m~v
F~
p~˙ = F~
Rotation
Drehachse & Drehwinkel θ~
˙
ω
~ = θ~
¨
α
~ =ω
~˙ = θ~
P
2
Trägheitsmoment J = mr0 i
1
2
2 Jω
~ = J~
Drehimpuls L
ω
~ = ~r × F~
Drehmoment D
~˙ = D
~
L
Tab. 1: Analogietabelle zur Translation und Rotation [Ger93]
Die Zusammenhänge zwischen den beiden Bewegungsvorgänge lassen sich sehr
schön wie in Tabelle 1 darstellen.
1.1.6
Der Steinersche Satz
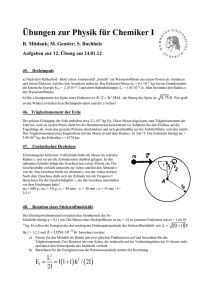
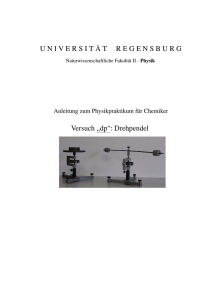
Abb. 3: Illustration zum steinerschen Satz [RWT05]
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
6
Der Steinersche Satz liefert eine einfache Formel für die Berechnung des Trägheitsmoments eines Körpers um eine beliebige zur Schwerpunktachse parallele Achse
unter der Voraussetzung, dass das Trägheitsmoment des Körpers bei Drehung um
seinen Schwerpunkt bekannt ist. Die Herleitung ist einfach nachvollziehbar, wenn
wir Abb. 3 betrachten.
Z
JA
2
r~i0 dm =
Z
~ 2 dm
(~
ri − d)
Z
Z
Z
~
2
~
=
ri dm − 2d · r~i dm + d~2 dm
{z
} | {z }
| {z } |
=
(1)
Z
=
(2)
(16)
(17)
(3)
r~i2 dm + M · d~2
(18)
= JS + M · d~2
(19)
Hier ist mit S die Schwerpunktachse bezeichnet, und A ist eine beliebige Parallele
dazu. A darf natürlich auch außerhalb des Körpers liegen, der Satz gilt dann immer
noch. (1) ist das ursprüngliche JS mit Drehachse S, (2) fällt bei S als Ursprung des
Systems weg und (3) ist das zusätzliche Trägheitsmoment, welches der rotierende
Körper durch die Achsenänderung d~ erhält.
1.1.7
Mathematische Herleitung von J am Beispiel des Vollzylinders
Aus der Physikvorlesung wissen wir, dass das Trägheitsmoment von Körpern kontinuierlicher Dichte schreiben können als
Z
J = r2 dm
(20)
wobei r der Abstand jedes Masseteilchens von der Drehachse ist. Die Formel für
das Trägheitsmoment eines Zylinders können wir nun zeigen über die Annäherung,
dass ein Zylinder eine Aneinanderreihung infinitesimaler Kreisscheiben ist. Eine
Kreisscheibe hat konstante Masseverteilung, wir nennen sie σ = M
A , wobei A die
Fläche der Scheibe sei. Die Fläche eines jeden Masseteilchens ist dA = 2πr dr, die
Masse jedes Teilchens ist
dm = σ dA =
M
2πr dr
A
(21)
Also gilt
Z
J
=
2
Z
r dm =
R
2
r σ2πr dr = 2πσ
0
=
Z
R
r3 dr
(22)
0
πM 4
1
2πM R4
=
R = M R2
A 4
2πR2
2
(23)
Mit dieser Formel können wir die Trägheitsmomente der Teilscheiben des Körpers
aufsummieren und addieren und erhalten so das Trägheitsmoment J aus den Abmessungen des betrachteten Zylinders.
Analog ergibt sich für das Trägheitsmoment der Kugel
J=
2
M R2
5
(24)
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
7
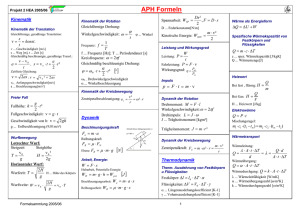
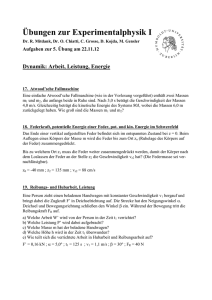
Abb. 4: Foto der einzelnen versuchsrelevanten Objekte [PP05]
1.2
Versuchsaufbau
Bei diesem Versuch werden auf eine mit einer Spiralfeder verbunden Achse mehrere
Körper befestigt, um deren Trägheitsmoment und das Richtmoment der Feder zu
bestimmen. Als Körper stehen eine Kugel, ein Vollzylinder, ein Quader und eine
Kreisscheibe zur Verfügung, die nacheinander auf der Achse befestigt werden. Die
Scheibe besitzt zwei Bohrungen, eine direkt im Mittelpunkt und eine Parallel zur
anderen Bohrung etwas weiter am Rand. Die zweite Bohrung wird für die Berechnung und Bestätigung des Steinerschen Satzes benötigt (s. Abb. 4).
1.3
Durchführung
Versuch A: Zunächst einmal wird der Vollzylinder auf der Achse befestigt und
in Schwingung versetzt. Nun wird die Durchlaufzeit bestimmt die später für die
Bestimmung des Eigenträgheits- und des Richtmoments benötigt wird. Bei jedem
Körper werden fünf Messungen der Schwingungsdauern durchgeführt und die Werte
gemittelt um nachher ein möglichst genaues ω (Kreisfrequenz) zu erhalten. Nach
dem Vollzylinder wird die Kugel auf der Achse montiert und wieder gemessen. Aus
den beiden Kreisfrequenzen lässt sich nun das Richtmoment D∗ der Spiralfeder
sowie das Eigenträgheitsmoment J0 bestimmen. Das geschieht wie folgt:
ω
=
JKugel
=
JZylinder
=
2π
T
D∗
− J0
ωKugel
D∗
− J0
ωZylinder
(25)
(26)
(27)
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
8
Umstellen nach J0 und Gleichsetzen liefert
D∗ =
(ωk2 · ωz2 )(Jz − Jk )
ωk2 − ωz2
(28)
J0 ist nun durch Einsetzen in eine der beiden obigen Gleichungen für das Trägheitsmoment zugänglich. Die Trägheitsmomente der Körper wurden vorher aus ihren
Abmessungen berechnet (JKugel = 25 m · r2 , JZylinder = 21 m · r2 ).
Versuch B: Als nächstes wird nun der Quader auf der Achse befestigt und dann
alle Schwingungsdauern sowie alle vier Trägheitsmomente der jeweiligen Achsen
bestimmt (Parallel zu a, b, c und der Diagonalen). Das geschieht mit Hilfe folgender
Gleichungen:
Ja
=
Jb
=
Jc
=
Jd
=
D∗
ωa2
D∗
ωb2
D∗
ωc2
D∗
ωd2
− J0
(29)
− J0
(30)
− J0
(31)
− J0
(32)
Für die Trägheitsmomente können wir auch aus den Abmessungen Werte erhalten,
die ermittelten Werte vergleichen wir dann in der Zusammenfassung. Für das Trägheitsmoment Jd bei Schwingung um die Diagonale gibt es zusätzlich eine Formel,
die die Berechnung über die vorher bestimmten Trägheitsmomente um die Hauptträgheitsachsen möglich macht. Folgende Formeln liegen zugrunde:
Ja2
=
Jb2
=
Jc2
=
Jd2
=
Jd3
=
1
m(b2 + c2 )
12
1
m(a2 + c2 )
12
1
m(a2 + b2 )
12
a
b
c
Ja ( )2 + Jb ( )2 + Jc ( )2
d
d
d
1 a2 b2 + a2 c2 + b2 c2
m
6
d2
(33)
(34)
(35)
(36)
(37)
Die Herleitung ist in [PP05] geschildert.
Versuch C: Zuletzt wird das Trägheitsmoment der Scheibe bestimmt, dazu wird
zunächst die Schwingungsdauer der Bohrung in der Mitte bestimmt und danach die
der zweiten Bohrung. Nun lässt sich der Satz von Steiner belegen, indem wir jeweils
den Wert des Trägheitsmoments aus den Abmessungen des Körpers bestimmen
und einen experimentellen Wert ermitteln, wie wir das in Versuch A und Versuch
B gemacht haben (s. z. B. Gleichungen 29 bis 32).
Die Gleichungen für den Steinerschen Satz finden sich bereits in der Klärung des
physikalischen Kontexts (Gleichung 19).
1.4
Messwerte
Die Ergebnisse sind wie folgt:
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
1.4.1
9
Versuch A
Masse
Durchmesser
Radius
Höhe
Vollzylinder
973.5 g
70.0 mm
35.0 mm
90.0 mm
Tab. 2: Abmessungen des Zylinders
Masse
Durchmesser
Radius
Kugel
2379 g
81.3 mm
40.7 mm
Tab. 3: Abmessungen der Kugel
Messung 1
Messung 2
Messung 3
Messung 4
Messung 5
Mittelwert /
Tz /s
0.84
0.85
0.84
0.84
0.85
1
s
ω/ 1s
7.45
7.43
7.51
7.48
7.43
7.46
Tk /s
1.37
1.37
1.37
1.36
1.39
ω/ 1s
4.59
4.57
4.59
4.61
4.53
4.58
Tab. 4: Gemessene Schwingdauer und berechnete Kreisfrequenz für Zylinder und
Kugel, Versuch A
Siehe Tab. 2, 3 und 4.
1.4.2
Versuch B
Siehe Tab. 5 und 6.
1.4.3
Versuch C
Siehe Tab. 7 und 8.
1.5
Auswertung
1.5.1
Jz
=
Jk
=
D∗
=
J0
=
Versuch A
1
1
m · r2 = 0.9735 · 0.0352 kg · m2 = 0.596kg · m2 · 10−3
2
2
2
2
2
m · r = 2.379 · 0.04072 kg · m2 = 1.572kg · m2 · 10−3
5
5
(4.582 · 7.462 )(0.596 − 1.572) kg · m2 · 10−3
kg · m2 · 10−3
(ωk2 · ωz2 )(Jz − Jk )
=
= 32.90
2
2
2
2
2
ωk − ωz
4.58 − 7.46
s
s2
D∗
32.90
− Jk =
− 1.572kg · m2 · 10−3 = −0.004990kg · m2 · 10−3
2
ωk
4.582
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
Kantenlänge a
Kantenlänge b
Kantenlänge c
Masse Quader
Diagonale
10
Quader
65.0 mm
134.9 mm
176.1 mm
4130 g
231.2 mm
Tab. 5: Abmessungen des Quaders (in mm)
Messung 1
Messung 2
Messung 3
Messung 4
Messung 5
Mittelwert /
Ta /s
4.34
4.45
4.43
4.44
4.52
1
s
ω/ 1s
1.45
1.41
1.42
1.42
1.39
1.42
Tb /s
3.73
3.68
3.75
3.76
3.70
ω/ 1s
1.69
1.71
1.68
1.67
1.70
1.69
Tc /s
2.99
3.02
3.04
3.06
3.10
ω/ 1s
2.10
2.08
2.07
2.05
2.02
2.07
Td /s
3.38
3.37
3.43
3.44
3.44
ω/ 1s
1.86
1.86
1.83
1.83
1.83
1.84
Tab. 6: Gemessene Schwingdauer und berechnete Kreisfrequenz um die Hauptträgheitsachsen a, b und c sowie die Diagonale d, Versuch B
Masse
Achsenabstand
Höhe
Radius
Scheibe
671.2 g
98.3 mm
2.2 mm
200.3 mm
Tab. 7: Abmessungen der Scheibe (in mm)
Messung 1
Messung 2
Messung 3
Messung 4
Messung 5
Mittelwert /
TS /s
3.97
3.97
3.95
3.94
4.01
1
s
ω/ 1s
1.58
1.58
1.59
1.60
1.57
1.58
Ts /s
5.44
5.45
5.28
5.07
5.42
ω/ 1s
1.16
1.15
1.19
1.24
1.16
1.18
Tab. 8: Gemessene Schwingdauer und berechnete Kreisfrequenz um Schwerpunktachse S und parallele Achse s, Versuch C
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
1.5.2
1.5.3
Versuch B
Ja
=
Ja2
=
Jb
=
Jb2
=
Jc
=
Jc2
=
Jd
=
Jd2
=
Jd3
=
D∗
− J0 = 16.39kg · m2 · 10−3
ωa2
1
m(b2 + c2 ) = 16.94kg · m2 · 10−3
12
D∗
− J0 = 11.55kg · m2 · 10−3
ωb2
1
m(a2 + c2 ) = 12.13kg · m2 · 10−3
12
D∗
− J0 = 7.71kg · m2 · 10−3
ωc2
1
m(a2 + b2 ) = 7.72kg · m2 · 10−3
12
D∗
− J0 = 9.70kg · m2 · 10−3
ωd2
b
c
a
Ja ( )2 + Jb ( )2 + Jc ( )2 = 9.70kg · m2 · 10−3
d
d
d
1 a2 b2 + a2 c2 + b2 c2
m
= 9.95kg · m2 · 10−3
6
d2
Versuch C
JS
JS1
Js
Js1
1.5.4
11
= m · r2 = 13.46kg · m2 · 10−3
D∗
− J0 = 13.11kg · m2 · 10−3
=
ωS2
= JS + m · s2 = 19.95kg · m2 · 10−3
D∗
=
− J0 = 23.64kg · m2 · 10−3
ωs2
Fehlerbetrachtung und Fehlerrechnung
Als Messgenauigkeiten bei den Abmessungen der Rotationskörper haben wir, da
wir die Genauigkeit der Schieblehre nicht ausnutzen konnten, ∆x = 0.5mm. Die
Schwingungsdauer konnten wir mit der Stoppuhr zu einer Genauigkeit ∆t = 0.05s
bestimmen, der Fehler ist die geschätzte Summe aus Geräte-, Paralaxe- und Reaktionsfehler. Der Zeitfehler fließt in die Fehlerrechnung nicht mit ein, da wir aus
den Kreisfrequenzen direkt die Streuung berechnet haben. Die Massen der Körper
waren angegeben, sie wurden als genau angenommen.
Vernachlässigen kann man die Dichteänderung wegen der Temperatur der Körper.
Auch die Reibung der Apparatur mit der Aufhängungsachse und die Luftreibung
können wir nicht bestimmen. Die untersuchten Körper hatten jeweils Bohrungen,
die das Trägheitsmoment ein wenig beeinflussten, sowie unvermeidliche Verunreinigungen. Selbst die Apparatur war nicht ganz symmetrisch, es gab Schräubchen und
andere feine Ungenauigkeiten, die mitschwangen.
Die Fehler der mathematisch berechneten Trägheitsmomente lassen sich über die
partielle Ableitung nach x, welches die jeweils festgestellten Maße des Körpers darstellt, berechnen, da in der Massenbestimmung kein Fehler auftrat. Die Betragsstriche können wir weglassen, da die Grundgrößen positiv sind.
Es ergeben sich folgende Formeln:
∂Jz · ∆x = mr∆x = 0.9735kg · 0.035m · 0.5mm
∆Jz = ∂r 1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
12
0.017 · 10−3 · kg · m2
∂Jk · ∆x = 4 mr∆x = 2.379kg · 40.65mm · 0.4mm
= ∂r 5
=
∆Jk
=
∆Ja2
=
=
∆Jb2
=
=
∆Jc2
=
=
∆Jd3
=
=
∆JS
∆Js
=
=
=
=
=
0.039 · 10−3 · kg · m2
1
1
m(b + c)∆x = · 4.130kg · (134.9 + 176.1)mm · 0.5mm
6
6
0.107 · 10−3 · kg · m2
1
· 4.130kg · (65.0 + 176.1)mm · 0.5mm
6
0.083 · 10−3 · kg · m2
1
· 4.130kg · (65.0 + 134.9)mm · 0.5mm
6
0.069 · 10−3 · kg · m2
ab2 + ac2 + a2 b + bc2 + a2 c + b2 c a2 b2 + a2 c2 + b2 c2
1
m(
+
)∆x
3
d2
d3
1
· 4.130kg · (...)mm · 0.5mm
3
0.196 · 10−3 · kg · m2
mr∆x = 0.6712kg · 0.2003m · 0.5mm
0.067 · 10−3 · kg · m2
∆JS + 2ms∆x = ∆JS + 2 · 0.6712kg · 0.0983m · 0.5mm
0.133 · 10−3 · kg · m2
Der Fehler der Kreisfrequenzen war jeweils über die Streuung zu berechnen. Aus
der Streuungsformel [PP05]
Sω
∆ω = t · √
N
mit t = 2.8, N = 5 und
r
1 X
Sω =
(ω̄ − ωi )2
N −1
als Wurzel aus dem Quotienten der Summe der Fehlerquadrate mit N − 1 ergaben
sich eingesetzt folgende Werte (jeweils in 1s ):
∆ωz = 0.0242, ∆ωk = 0.0368, ∆ωa = 0.0251, ∆ωb = 0.0130, ∆ωc = 0.0359, ∆ωd =
0.0154, ∆ωS = 0.0132, ∆ωs = 0.0421.
Nun lässt sich ∆D∗ über die partielle Ableitung bestimmen:
∆D∗
=
+
∆Jk
∆Jz
+
1
1
1 ωz2 − ω2 ωz2 − ω12 k
k
Jk − Jz
Jk − Jz
2· 1
·
∆ω
+
2
·
· ∆ωz
k
( ω12 − ω12 )2 · ωz2 ( ω2 − ω12 )2 · ωk2 z
=
z
k
k
kg · m2
1.89 · 10−3
s2
Mit diesen Angaben lässt sich nun mit der partiellen Ableitung von J0 ∆J0 berechnen:
∆J0
=
=
∆D∗
2
|ωk |
+2·
D∗
3
|ωk |
· ∆ωk + ∆Jk
0.154 · 10−3 · kg · m2
1
RICHT- UND TRÄGHEITSMOMENT BEI DREHSCHWINGUNGEN
13
Analog lassen sich nun die restlichen Fehler der experimentell bestimmten TrägD∗
∆D ∗
· ∆ωx + ∆J0 berechnen. Dies
heitsmomente aus der Gleichung ∆Jx = |ω
2 +2·
|ωx |3
x|
führt zu folgenden Werten:
∆Ja
∆Jb
∆Jc
∆Jd
∆JS
∆Js
1.6
= 1.68 · 10−3 · m2 · kg
= 1.00 · 10−3 · m2 · kg
= 0.87 · 10−3 · m2 · kg
= 0.87 · 10−3 · m2 · kg
= 1.13 · 10−3 · m2 · kg
= 3.20 · 10−3 · m2 · kg
Zusammenfassung
Aus Auswertung und Fehlerrechnung erhalten wir folgende Werte (Fehler wurden
auf-, Messwerte kaufmännisch gerundet):
Jz
Jk
J0
D∗
Ja
Ja2
Jb
Jb2
Jc
Jc2
Jd
Jd2
Jd3
JS
JS1
Js
Js1
= 0.60(2) · 10−3 · m2 · kg
= 1.57(4) · 10−3 · m2 · kg
= 0.0(2) · 10−3 · m2 · kg
kg · m2 · 10−3
= 33(2)
s2
= 16(2) · 10−3 · m2 · kg
= 16.94(11) · 10−3 · m2 · kg
= 11.5(10) · 10−3 · m2 · kg
= 12.13(9) · 10−3 · m2 · kg
= 7.7(9) · 10−3 · m2 · kg
= 7.72(7) · 10−3 · m2 · kg
= 9.7(9) · 10−3 · m2 · kg
= 9.70 · 10−3 · m2 · kg
= 10.0(2) · 10−3 · m2 · kg
= 13.46(7) · 10−3 · m2 · kg
= 13.1(12) · 10−3 · m2 · kg
= 19.95(14) · 10−3 · m2 · kg
= 24(4) · 10−3 · m2 · kg
Als Fazit lässt sich sagen, dass es kaum unerwartete Messwerte gab, lediglich bei
Jd und beim Nachweis der Gültigkeit des Steinerschen Satzes gab es signifikante
Unterschiede. Diese fallen aber so gering aus, dass man mit dem Ergebnis des Experiments zufrieden sein kann.
Bei allen anderen Messungen fällt jeweils der eine Wert in den Fehlerbereich des
anderen, was als Bestätigung der überprüften Gleichungen angesehen werden kann.
2
LITERATURVERZEICHNIS
2
14
Literaturverzeichnis
2.1
Quellennachweis
Ger93: Gerthsen/Vogel: Physik, Springer-Lehrbuch 1993
PP05: Die Webseite des Phys. Praktikums der Universität Paderborn:
http://physik.uni-paderborn.de/studieninfos/praktika/pmp-a/
RWT05: Die Physik-Seite der RWTH Aachen:
http://www.physik.rwth-aachen.de/group/IIIphys/INFOS/Exscript/6Kapitel/VI7Kapitel.html
Spi05: Die Webseite der Zeitschrift »Der Spiegel«:
http://www.spiegel.de
SS05:
Schmidt/Sohler: Vorlesung Physik A der Uni Paderborn im WS 2005/06
UU05: Die Webseite der Physik der Universität Ulm:
http://wwwex.physik.uni-ulm.de/lehre/PhysIng1/node22.html
2.2
Bilder und Tabellen
Abbildungsverzeichnis
1
2
3
4
Rasante Kurvenfahrt [Spi05] . . . . . . . . . . . . . . .
Skizze zur Rotation [UU05] . . . . . . . . . . . . . . .
Illustration zum steinerschen Satz [RWT05] . . . . . .
Foto der einzelnen versuchsrelevanten Objekte [PP05]
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
4
5
7
Analogietabelle zur Translation und Rotation [Ger93] . . . . . . . .
Abmessungen des Zylinders . . . . . . . . . . . . . . . . . . . . . . .
Abmessungen der Kugel . . . . . . . . . . . . . . . . . . . . . . . . .
Gemessene Schwingdauer und berechnete Kreisfrequenz für Zylinder
und Kugel, Versuch A . . . . . . . . . . . . . . . . . . . . . . . . . .
Abmessungen des Quaders (in mm) . . . . . . . . . . . . . . . . . . .
Gemessene Schwingdauer und berechnete Kreisfrequenz um die Hauptträgheitsachsen a, b und c sowie die Diagonale d, Versuch B . . . . .
Abmessungen der Scheibe (in mm) . . . . . . . . . . . . . . . . . . .
Gemessene Schwingdauer und berechnete Kreisfrequenz um Schwerpunktachse S und parallele Achse s, Versuch C . . . . . . . . . . . .
5
9
9
Tabellenverzeichnis
1
2
3
4
5
6
7
8
9
10
10
10
10