Projekt 6 Integralgleichungen in der quantenmechanischen
Werbung

Projekt 6
Integralgleichungen in der
quantenmechanischen Streutheorie
M. Quandt & G. Burgio
6.1
Problemstellung
Einer der wichtigsten Erfolge der Quantenmechanik ist die Erklärung des Wasserstoffspektrums durch Übergänge zwischen diskreten Energieeigenzständen des Wasserstoffatoms. Mathematisch handelt es sich hierbei um quadratintegrable Lösungen
der Schrödingergleichung, bei denen die Wellenfunktion im Unendlichen sehr schnell
abfällt, und die Aufenthaltswahrscheinlichkeit somit an das Kraftzentrum gebunden
ist. Neben diesen gebundenen Zuständen besitzt das Spektrum eines Hamiltonoperators i.A. auch einen kontinuierleichen Anteil, der durch nicht-normierbare Lösungen der
Schrödingergleichung charakterisiert ist. Bei diesen uneigentlichen“ Eigenzuständen
”
fällt die Aufenthaltswahrscheinlichkeit in großer Entfernung vom Kraftzentrum nicht
ab: sie beschreiben die Ablenkung eines aus dem Unendlichen kommenden und ins Undendliche fließenden Teilchenstroms, und stellen somit das Analogon zum klassischen
Streuproblem dar.
Die übliche Methode zur Berechnung gebundener Eigenzustände durch Matrixdiagonalisierung in einer geeigneten Funktionenbasis ist im Kontinuum der Streuzustände
von geringem Nutzen: Für eine ausreichende numerische Präzision muß hierbei nämlich
der Ultraviolett-cutoff der gewählten Funktionenbasis im Impulsraum sehr viel größer
als der Impuls des zu beschreibenden (Streu-)Zustandes gewählt werden, was das Verfahren sehr ineffizient macht.
Da Streulösungen nicht mehr quandratintegrabel sind, werden sie durch physikalische Randbedingungen in großem Abstand vom Streuzentrum charakterisiert. Am
einfachsten gelingt die Verbindung der Schrödingergleichung mit den Streurandbedingungen durch die Umformulierung in eine Integralgleichung, die sog. LippmannSchwinger-Gleichung. Im vorliegenden Projekt soll diese Umformulierung als Prototyp
einer physikalischen Integralgleichung untersucht und numerisch gelöst werden.
1
2
6.2
PROJEKT 6. INTEGRALGLEICHUNGEN
Das quantenmechanische Streuproblem
In diesem Abschnitt fassen wir die Grundlagen des quantenmechanischen Streuproblems und die Ableitung der Lippmann–Schwinger–Gleichung zusammen. Auf eine
vollständige Abhandlung muß aus Platzgründen verzichtet werden; ausführlichere Darstellungen findet man in den meisten Lehrbüchern der Quantenmechanik, vgl. die angegebene Literatur.
Wir betrachten einen Hamiltonoperator der Form
H = H0 + V (x) ,
(6.1)
wobei H0 = p2 /2m der freie nicht-relativistische Hamiltonian ist und das Wechselwirkungspotential V hinreichend kurzreichweitig sei. Zu einem Zeitpunkt ti 0 sei
das Teilchen in einen (quadratintegrablen) Anfangszustand ψ(ti ) präpariert, der einen
relativ scharfen Ort und Impuls k besitzt. Liegt der Anfangsort sehr weit vom Kraftzentrum entfernt, so wird sich ψ(ti ) zunächst als freies Wellenpaket auf das Streuzentrum
zubewegen. In der Folge wird das Wellenpaket in den Einflußbereich des Potentials
kommen, von diesem deformiert werden, und sich zu noch späteren Zeiten wieder aus
dem Einflußbereich des Potentials entfernen. Der Endzustand ψf (tf ) bei tf 1 ist
also ein deformiertes Wellenpaket, das sich mit der Energie Ek0 = Ek (elastische Streuung) nach der freien Dynamik fortbewegt. Wir werden später sehen, daß es sich hierbei
asymptotisch um eine Kugelwelle handelt, wobei eine Ortsmessung an der Stelle r vom
Kraftzentrum aus gesehen das Teilchen mit einer relativ scharfen Ortsauflösung und
einem relativ scharfen Impuls k0 = |k| r̂ lokalisieren wird. Die (relative) Wahrscheinlichkeit, das Teilchen im Detektor der Fläche dA unter dem Raumwinkel Ω = (k, k0 )
nachzuweisen ergibt dann den (differentiellen) Streuquerschnitt σ(Ω) dA.
Der Zusammenhang zwischen dem Anfangs- und Endzustand ist natürlich durch
den Zeitentwicklungsoperator des vollen Hamiltonians gegeben,
ψ( tf ) = U (tf , ti ) ψ(ti ) .
Um die triviale“ Dynamik des freien Hamiltonians abzuspalten definiert man nun
”
Zustände
φi = U0 (0 − ti ) ψ(ti ) ,
ψf (tf ) = U0 (tf − 0) φf ,
wobei U0 der freie Zeitentwicklungsoperator ist. Die Zustände φi und φf sind, wie
die entsprechenden Anfangs- und Endzustände auch, quadratintegrable Wellenpakete.
Man erhält nun
φf = U0† (tf ) U (tf , ti ) U0 (ti ) ≡ U (tf , ti ) φi .
Der Operator U ist der volle Zeitentwicklungsoperator im Wechselwirkungsbild, und
die angegebene Konstruktion schiebt die Streuung also quasi auf einen Zeitpunkt zusammen:
U
U
U0
0
ψi (ti ) −→
φi → φf ψ f (tf ) .
| {z }
instantan
Der Übergang wird hierbei durch den Streuoperator (oder S-Operator )
U (tf , ti ) = U (∞, −∞)
S ≡ t lim
→−∞
i
tf →+∞
6.2. DAS QUANTENMECHANISCHE STREUPROBLEM
3
vermittelt, der sich somit als Zeitentwicklungsoperator im Wechselwirkungsbild erweist.
Denkt man sich den Pseudo-Anfangszustand φi nach Impulseigenzuständen entwickelt,
Z
d3 k
φi =
ci (k) |ki ,
(2π)3
(im Ortsraum entspricht dies einer Fouriertransformation), so gilt für die Koeffizienten
des Pseudo-Endzustands in einer analogen Entwicklung
Z
d3 p
cf (k) = hk |φf i = hk|S|φi i =
hk|S|pi ci (p)
(2π)3
Diese Darstellung ist nun vollständig zeitunabhängig. Zur Beschreibung des Streuprozesses genügt bereits die Kenntnis des S-Operators in der Impulsdarstellung, die
sog. Streumatrix oder S-matrix hk|S|pi. Dieser Zusammenhang erklärt auch den Gebrauch auslaufender“ und einlaufender“ ebener Wellen in der (zeitunabhängigen)
”
”
eindimensionalen Streutheorie.
Für das weitere Vorgehen empfiehlt es sich, den S-Operator in einen Teil vor“ und
”
nach“ der Wechselwirkung aufzuspalten. Hierzu definiert man die Møller-Operatoren
”
Ω+ ≡ lim U (0, ti ) = lim U † (ti ) U0 (ti )
ti →−∞
ti →−∞
Ω− ≡ lim U (0, tf ) = lim U † (tf ) U0 (tf ) ,
tf →∞
tf →∞
so daß
S = Ω†− Ω+ .
(6.2)
Im Gegensatz zum unitären Operator S sind die Møller-Operatoren nur isometrisch,
da sie lediglich auf den Teil Hc des Hilbertraums abbilden, der orthogonal zu den
Bindungszuständen von H ist. Wichtiger ist jedoch die Anwendung auf einen uneigentlichen Freiteilchenzustand mit festem Impuls k (d.h. eine ebene Welle)
Ψ±
k = Ω± |ki .
Diese Streuzustände sind nun uneigentliche (also nicht normierbare) Lösungen der vollen zeitunabhängigen Schrödingergleichung zu derselben Energie E(k) ≡ (~k)2 /2m wie
die freie Lösung |ki. Dies ergibt sich unmittelbar aus der Grenzwertdarstellung
Ω+ = lim U (0, t) = lim t→−∞
Z0
→+0
dτ U (0, τ ) eτ
−∞
und analog für Ω− . Für den Streuzustand folgt
Ψ+
k
= lim
→+0 ~
Z0
dτ e
−∞
~
τ
U (τ ) U0 (τ ) |ki = lim
→+0 ~
†
Z0
−∞
i
dτ exp
(H − Ek − i)
~
= lim i [Ek + i − H]−1 |ki = lim i R(Ek + i) |ki .
→+0
→+0
(6.3)
4
PROJEKT 6. INTEGRALGLEICHUNGEN
Hierbei ist Ek die Energie des freien Zustandes |ki und R(z) ≡ (z−H)−1 die Resolvente
des vollen Hamiltonoperators H. Aus (6.3) ergibt sich nun unmittelbar
−1
(Ek − H)|Ψ+
|ki
k i = lim [Ek + i − H − i] i [Ek + i − H]
→+0
n
o
= lim i |ki − |Ψ+
i
= 0,
k
→+0
d.h. Ψ+
k löst tatsächlich die volle Schrödingergleichung zur Energie Ek . Weiterhin
ergibt sich durch Anwendung der 2. Resolventenidentität1 auf (6.3)
−1
|Ψ±
V |Ψ+
k i = |ki + lim [Ek ± i − H0 ]
ki,
→+0
(6.4)
wobei wir den analogen Fall Ψ−
k ebenfalls berücksichtigt haben. Die Relation (6.4) ist
die gesuchte Lippmann-Schwinger-Gleichung in Operatorform. Eine mögliche Konkretisierung erhält man durch den Übergang zur Ortsdarstellung
Z
0
1
±
3 0
r V (r0 ) hr0 |Ψ± i .
hr|Ψk i = hr|ki + lim
d r r
k
→0
Ek − H0 ± i Der hier auftretende Integralkern ist im Wesentlichen die Green’sche Funktion des
Laplace-Operators mit definierten Randbedingungen; sie kann wie in der Elektrodynamik durch Fouriertransformation und Kontourintegration berechnet werden. Das
Ergebnis ist die Born’sche Integralgleichung
Z
±ik|r−r0 |
m
±
3 0 e
ik·r
0
Ψk (r) = e −
dr
V (r0 ) Ψ±
(6.5)
k (r ) .
2
0
2π~
|r − r |
Diese Gleichung ist für numerische Zwecke weniger geeignet, erlaubt aber eine einfache
asymptotische Auswertung: Entwickelt man wie üblich für r r0 (mit dem radialen
Einheitsvektor r̂ ≡ r/|r|)
0
0
eik(r−r̂·r )
e±ik|r−r |
≈
,
|r − r0 |
r
so ergibt sich nach leichter Rechnung
e±ikr
f (k0 , k)
r
Z
m
0 0
0
d3 r0 eik ·r V (r0 )Ψ+
f (k0 , k) = −
k (r ) ,
2
2π~
ik·r
Ψ+
+
k (r) ≈ e
(6.6)
wobei k0 = k r̂ ein Vektor mit Betrag |k| und radialer Richtung r̂ = r/r ist. Da
die Streuwelle gerade die Amplitude für die Detektierung des gestreuten Teilchens
an der Position r angibt, beschreibt k0 den Impuls des gestreuten Teilchens, und
Ω = (θ, φ) = (k, k0 ) ist der Streu(raum)winkel.2 Die Streulösung stellt für große
Mit R(z) = (z−H0 −V )−1 und R0 (z) = (z−H0 )−1 folgt die Identität R(z) = R0 (z)+R0 (z)V R(z),
wie man durch direktes Ausrechnen leicht bestätigt.
2
Das gestreute Teilchen hat natürlich weder einen festen Impuls noch eine feste Position, sondern
wird wie eingangs erläutert durch ein Wellenpaket beschrieben, d.h. durch eine Überlagerung von
Streuwellen mit Koeffizienten c(k0 ), die durch die Präparierung des Anfangszustandes gegeben sind.
1
6.2. DAS QUANTENMECHANISCHE STREUPROBLEM
5
Abstände vom Streuzentrum also eine Überlagerung einer ungestreuten ebenen Welle
und einer Kugelwelle, die vom Schwerpunkt des Streuzentrums radial ausläuft bwz. in
dieses einläuft. Die Amplitude f (k0 , k), mit der diese Welle angeregt wird, heißt Streuamplitude.
Die Streuamplitude ist eine der wichtigsten Größen der quantenmechanischen Streutheorie. Sie hängt vom Betrag k = |k|, also der Energie des einfallenden Teilchens, und
dem Streuwinkel zwischen k und k0 (oder r) ab. Tatsächlich kann man zeigen, das ihr
Absolutquadrat nichts anderes ist als der differentielle Wirkungsquerschnitt
dσ
.
(6.7)
dΩ
Dies ergibt sich durch das Verhältnis der Stromdichten von einlaufender Welle und der
asymptotischen Streuwelle (6.6). Auf eine detaillierte Ableitung dieses Zusammenhangs
soll hier verzichtet werden; er findet sich in den meisten Lehrbüchern der Quantenmechanik (vgl.Literaturverzeichnis).
Um zu einer numerisch handhabbaren Form der Lippmann-Schwinger-Gleichung
(6.4) zu kommen, definieren wir zunächst einen Operator T durch die Relation
|f (k0 , k)|2 =
T |ki = V |Ψ†k i .
Hieraus ergibt sich die Übergangsmatrix oder T-Matrix zu
Z
Z
0
+
+
0
0
0
3
0
T (k , k) = hk |T |ki = hk |V Ψk i = d r hk |ri hr|V |Ψk i = d3 r eik r V (r) Ψ+
k (r)
(6.6)
= −
2π~2
f (k0 , k) .
m
(6.8)
Wegen (6.7) kann der differentiellen Wirkungsquerschnitt somit direkt durch die TMatrix ausgedrückt werden,
m2
dσ
2
= 2 4 |T (k0 , k)| .
(6.9)
dΩ
4π ~
Die T-Matrix hat eine anschauliche physikalische Bedeutung: Aus der LippmannSchwinger- Gleichung (6.4) folgt unmittelbar
1
T |ki
→+0 E − H0 + i
(6.10)
1
T.
E − H0 + i
(6.11)
T |ki = V |ki + V lim
bzw. die Operatorgleichung
T = V + lim V
→+0
Mit dem Argument z ≡ Ek + i kann diese Identität auch in der Form
T (z) = V + V R0 (z)T (z) = V + V R(z)V
notiert werden, wobei die zweite Form durch Anwendung der Resolventenidentität entsteht. Aus der ersten Form läßt sich leicht durch Iteration eine Potenzreihenentwicklung
im Streupotential V ableiten,
T (z) = V + V R0 (z)V + V R0 (z)V R0 (z)V + · · · .
(6.12)
6
PROJEKT 6. INTEGRALGLEICHUNGEN
Die ist die Born’sche Reihe, deren erste Glieder bei sehr hohen Energien Ek m eine
brauchbare Näherung abgeben. Aus (6.12) folgt ebenfalls die Interpretation von T als
“effektives” Potential, bei dem die Einfachstreuung exakt ist. Der Übergangsoperator
summiert somit alle Mehrfachstreuungen an V zu einer effektiven Einfachstreuung an
T.
In der Impulsdarstellung folgt z.B. aus (6.10) die Relation
0
Z
0
hk |T |ki = hk |V |ki + lim
→0
d3 p
1
0
k .
T
hk
|V
|pi
p
(2π)3
Ek − Ep + i
(6.13)
Beachtet man noch, daß die Impulsmatrixelemente des Streupotentials gerade die
Fourier-Transformierte sind,
Z
Z
3
0
hk|V |pi = d r hk |ri hr|V |ki = d3 r V (r) · e−i(k−p) r = Ve (k − p) ,
so ergibt sich die Integralgleichung für die Übergangsmatrix in der Form
0
hk |T |ki = Ve (k0 − k) + lim
Z
→0
1
d3 p e 0
k .
p
V
(k
−
p)
T
(2π)3
Ek − Ep + i
(6.14)
Dies ist im Prinzip die gesuchte Integralgleichung. Für eine konkrete numerische Behandlung sind jedoch noch zwei Verbesserungen notwendig:
1. Für ein radialsymmetrisches Potential V = V (|r|) läßt sich die dreidimensionale
Integralgleichung (6.14) durch Partialwellenzerlegung in eine Reihe eindimensionaler Integralgleichungen vereinfachen.
2. Der Integrand in (6.14) ist komplex und die Polvorschrift → +0 ist numerisch
schwer zu handhaben.
6.3
Partialwellenzerlegung
Für eine radialsymmetrisches Potential V (r) = V (r) kann die Komplexität der Integralgleichung durch Abspaltung der Winkelabhängigkeit stark reduziert werden. Zunächst
kann man die Streulösung wie üblich in Partialwellen entwickeln,
Ψ+
k (r)
=
∞
X
uk` (r)
`=0
r
P` (cos θ)
(6.15)
Hier sind P` (z) die üblichen Legendre-Polynome und der Azimuthwinkel ϕ taucht wegen
der Symmetrie des Problems nicht auf. Die radiale Funktion uk` (r) löst die reduzierte
Schrödingergleichung
2m
~2 `(` + 1)
00
uk` (r) = k 2 uk` (r) .
(6.16)
−uk` (r) + 2 V (r) +
2
~
2mr
6.3. PARTIALWELLENZERLEGUNG
7
Die freie Lösung dieser Gleichung ist die bei r = 0 reguläre sphärische Besselfunktion uk` (r)/r = i` (2` + 1) j` (kr), wobei die Normierung so gewählt wurde, daß ohne
Streupotential (V = 0)
Ψ+
k (r)
∞
X
=
i` (2` + 1) j` (kr) P` (cos θ) = eikr = hr|ki .
(6.17)
`=0
Da das Streupotential bei sehr großen Abständen verschwindet, muß Ψ+
k bei r → ∞
dieselbe Asymptotik wie die freie Lösung besitzen, mit Ausnahme einer ev. geänderte Normierung und einer r-unabhängige Phasenverschiebung. Aus der asymptotischen
Form der Besselfunktionen folgt daher
Ψ+
k (r)
∞
`π
1 X
+ δ` (k) P` (cos θ) .
C` (k) sin kr −
≈
r `=0
2
(6.18)
Zum Vergleich mit (6.6) verwendet man die Partialwellenzerlegung (6.17) der ebenen
Welle und findet wegen der linearen Unabhängigkeit der Legendre-Polynome3
il
(2` + 1) eiδ` (k)
k
∞
1 X
fk (θ) =
(2` + 1) eiδ` (k) sin δ` (k) · P` (cos θ) .
k `=0
C` (k) =
(6.19)
Der partielle Streuquerschnitt nach (6.7) weist i.a. eine Interferenz verschiedener Partialwellen mit komplizierter Winkelabhängigkeit auf. Durch Integration über alle Raumwinkel ergibt sich jedoch ein einfacher Ausdruck für den totalen Wirkungsquerschnitt
∞
∞
X
X
4π
2
σ` (k) .
σ(k) =
(2` + 1) sin δ` (k) ≡
2
k
`=0
`=0
(6.20)
Somit kann die wesentliche Information über die Streuung in den einzelnen Partialwellen aus den Streuphasen δ` (k) extrahiert werden. Zur konkreten Berechnung der
Streuphasen aus der T-Matrix zerlegt man zunächst
∞
X
T (k , k) = 4π
(2` + 1)T` (k 0 , k) · P` (cos θ),
0
(6.21)
`=0
mit4 cos θ = (k0 · k)/k 0 k. Für die folgende Integralgleichung ist es hilfreich, die Impulse
k und k 0 als unabhängige Variablen zu betrachten, obwohl elastische Streuung natürlich
k = k 0 impliziert. Aus (6.8), (6.19) und (6.21) folgt für die Diagonalelemente
T` (k, k) = −
3
~2 iδ` (k)
e
sin δ` (k) ,
2mk
Wegen der Symmetrie des Problems hängt die Streuamplitude nicht vom Azimuthalwinkel ϕ ab.
Wegen k0 ∼ r̂ stimmt θ mit dem entsprechenden Winkel in Kugelkoordinaten überein, sofern man
den einlaufenden Impuls k in 3-Richtung orientiert.
4
8
PROJEKT 6. INTEGRALGLEICHUNGEN
womit sich die Streuphase zu
δ` (k) = arctan
Im T` (k, k)
Re T` (k, k)
(6.22)
ergibt. Verwendet man (6.21) und die entsprechende Zerlegung des Fourier-transformierten Potentials
Ve (k0 − k) = 4π
∞
X
(2` + 1) Ve` (k 0 , k) · P` (cos θ) ,
(6.23)
`=0
so ergibt sich aus der dreidimensionalen Integralgleichung wegen der Orthonormalität
der Kugelfunktionen eine eindimensionale Integralgleichung in jedem Drehimpulskanal
` = 0, 1, 2, . . .,
Z
1
2 ∞
0
0
e
dq q 2 Ve` (k 0 , q)
T` (q, k) .
(6.24)
T` (k , k) = V` (k , k) + lim
→+0 π
Ek − Eq + i
0
Um die numerisch ungünstige Polbedingung zu eliminieren verwendet man abschließend
die Dirac-Beziehung in der Form
lim
→+0
1
1
1
πm
=P
− iπδ(Ek − Eq ) = P
− i 2 δ(k − q) .
Ek − Eq + i
Ek − Eq
Ek − Eq
~k
Man erhält aus (6.24)
2
T` (k , k) = Ve` (k , k) + lim
→+0 π
0
0
− 2i
Z
∞
dq q 2 Ve` (k 0 , q) P
0
1
T` (q, k)
Ek − Eq
mk
V` (k 0 , k)T` (k, k) .
~2
Den Hauptwert eliminiert man durch Subtraktion der Null
Z
Z ∞
2 ∞
1
1
2 2e 0
2 e
0
dq k V` (k , k) P
dq P
T` (k, k) = k V` (k , k) T` (k, k)
= 0.
π 0
Ek − Eq
π
Ek − Eq
0
Somit ergibt sich
∞
Z
2
T` (k , k) = Ve` (k 0 , k) +
π
0
dq
0
− 2i
i
2m/~2 h 2 e 0
2
0
q
V
(k
,
q)T
(q,
k)
−
k
V
(k
,
k)
T
(k,
k)
`
`
`
`
k2 − q2
mk
V` (k 0 , k) T` (k, k) .
~2
Nur der letzte Term in dieser Gleichung ist explizit komplex. Definiert man daher einen
reellen Kern K` (k 0 , k) durch die Lösung der ersten Zeile in obiger Integralgleichung,
2
K` (k , k) = Ve` (k , k) +
π
0
0
Z
∞
dq
0
i
2m/~2 h 2 e 0
2
0
q
V
(k
,
q)K
(q,
k)
−
k
V
(k
,
k)
K
(k,
k)
,
`
`
`
`
k2 − q2
(6.25)
6.4. NUMERISCHE METHODEN
9
so folgt nach kurzer Rechnung
T` (k, k) =
K` (k, k)
1 + 2imk K` (k, k)/~2
und aus (6.22) schließlich
δ` (k) = − arctan
2mk
K` (k, k) .
~2
(6.26)
Gleichung (6.25) ist nun die endgültige Form der rellen, eindimensionalen Integralgleichung in jedem Drehimpulskanal, die numerisch gelöst werden soll. Mittels (6.26)
kann aus den Diagonalelementen der Lösung zunächst die Streuphase, und über (6.20)
sodann der totale Wirkungsquerschnitt berechnet werden.
6.4
Numerische Methoden
Die Lösung der Integralgleichung (6.25) erfolgt in drei Schritten:
1. Diskretisierung der Integralgleichung in ein algebraisches System der Form
(λ1 − B) f = b ,
(6.27)
wobei λ, B und b durch das jeweilige Verfahren der Diskretisierung bestimmt
sind, und f die gesuchte K-Matrix in Vektorform darstellt;
2. Lösung des algebraischen Systems (6.27);
3. Rekonstruktion der Lösung aus der diskretisierten Form f .
Im Folgenden soll für jede dieser drei Punkte ein mögliches Verfahren kurz vorgestellt werden; weitere Details und verfeinerte Methoden werden in der angegebenen
Literatur diskutiert.
6.4.1
Diskretisierung durch Quadratur: Nystrøm-Verfahren
Die Gleichung (6.25) stellt konzeptionell eine Fredholm’sche Integralgleichung zweiter
Art dar,
Z b
f (x) = g(x) +
dy L(x, y) f (y) ,
(6.28)
a
wobei die Koordinate x dem Impulsbetrag k entspricht, f (x) der gesuchten K-Matrix,
g = Ve , und der Integralkern L in offensichtlicher Weise durch (6.25) definiert ist. Die
Integrationsgrenzen sind wie bei allen Fredholm-Integralgleichungen x-unabhängig. Um
zu einer approximativen Umformung in ein lineares Gleichungssystem zu kommen gibt
es eine ganze Reihe ähnlicher Verfahren:5
5
Diese Liste erhebt keinen Anspruch aus Vollständigkeit; umfassendere Darstellungen findet man
in der angegebenen Literatur, insb. W. Hackenbusch, “Integral Equations” (1995).
10
PROJEKT 6. INTEGRALGLEICHUNGEN
• Kern-Approximation: Darstellung des Kerns durch eine geeignete Summe einfacher Kerne, z.B. durchPInterpolation mit Lagrange-Funktionen oder durch entartete Kerne, L(x, y) ≈ N
j=1 uj (x) vj (y), mit einer geeigneten (Orthonormal-)Basis
{uj , vj } auf [a, b].
• Kollokationsmethode: Wähle zu einer Stützstellenwahl {ξ1 , . . . , ξN } ⊂ [a, b] eine
geeignete Funktionenbasis {ϕ1 , . . . , ϕN } und ersetze f, g, L durch die Interpolation
zu den gegebenen Stützstellen in der gegebenen Basis.6
• Galerkin-Methode: Ähnlich zur Kollokationsmethode, nur wird hier eine Orthonormalbasis in einem geeigneten Hilbertraum vorausgesetzt, und die Koeffizienten
der Diskretisierung von f, g, L werden durch Orthonormalprojektion (anstelle von
Interpolation zu Stützstellen) bestimmt.
• Nystrøm-Verfahren: Das Integral in der Fredholm-Gleichung (6.28) wird durch
eine numerische Quadraturformel auf eine endliche Summe an optimal gewählten Stützstellen reduziert, was (6.28) automatisch in ein algebraisches System
umwandelt.
Im folgenden werden wir nur das Nystrøm-Verfahren genauer diskutieren. Hierzu bilden
wir im ersten Schritt das unendliche Integrationsintervall [0, ∞] durch eine Substitution
q = Q(z) auf ein kompaktes Intervall ab; im vorliegenden Fall kann etwa
i
hπ
1+z
oder
Q(z) =
(6.29)
Q(z) = tan (1 + z)
4
1−z
(jeweils mit z ∈ [−1, 1]) gewählt werden. Die Wahl der Funktion Q(z) übersetzt die
Stützstellenwahl in z ∈ [−1, 1] in eine solche für q ∈ [0, ∞]. Verwendet man eine Quadraturformel mit äquidistanten Stützstellen (in den z), so ist eine optimale Wahl der
Substitution Q(z) kritisch. Bei einem Quadraturverfahren mit adaptiver Stützstellenwahl kann hingegen eine “ungünstige” Wahl von Q(z) immer durch nicht-äquidistante
Z-Stützstellen kompensiert werden, so daß die Wahl von Q(z) unkritisch ist. Das hier
verwendete Gauß-Legendre-Verfahren ist adaptiv, und beiden Formel in (6.29) sind
gleichermaßen geeignet; wir wählen im vorliegenden Projekt die Funktion Q(z) wie in
(6.29) links.
Generell bestehen adaptive Integrationsverfahren aus einer Näherung der Form
Zb
dx µ(x) · f (x) ≈
a
N
X
wi f (zi ) ,
(6.30)
i=1
wobei die Stützstellen {zi } und die Gewichte {wi } so gewählt werden, dass für ein gegebenes Integrationsintervall [a, b] und eine vorgegeben Maßfunktion µ(x) mit möglichst
kleinem N eine möglichst hohe Präzision erreicht wird. Das hier verwendet GaussLegendre-Verfahren ist optimal and die Gewichtsfunktion µ(x) = 1 auf dem Intervall
[−1, 1] angepasst, also für Integranden, die in [−1, 1] relativ konstant sind. Für abweichende Maße können andere Stützstellen und Gewichte hilfreich sein; einen Überblick
findet man in Kap. 4 der The Numerical Recipes“ von Press et al.
”
6
Polynomiale Interpolation ist sehr instabil; für endliche Intervalle werden entweder rationale Funktionen oder eine trigonometrische Basis (Fourieranalyse) empfohlen.
6.4. NUMERISCHE METHODEN
11
Das Gauß-Legendre-Verfahren
1. Wähle die N Stützstellen zi als Nullstellen des Legendre-Polynoms PN (z)
der Ordnung N ,
PN (zi ) = 0 ,
i = 1, . . . , N .
(6.31)
2. Bestimme die Gewichte wi so, daß alle Polynome bis zur maximalen Ordnung (2N − 1) exakt integriert werden. Wegen der Orthonormalität der
Legendre-Polynome bedeutet dies
N
X
wi P` (zi ) = 2δ`0 ,
` = 0, . . . , 2N − 1
i=1
mit der expliziten Lösung
wi =
2
1 − zi2
2
=
,
N 2 (zi PN (zi ) − PN −1 (zi ))2
(1 − zi2 )PN0 (zi )2
i = 1, . . . , N
(6.32)
Die effizienteste Implementierung dieses Verfahrens ist der Algorithmus gauleg
von G.B. Rybicki, s. The Numerical Recipes , loc. cit. Insbesondere ist dieser
”
Algorithmus in sich abgeschlossen, da er die relevanten Legendre-Polynome mit
Hilfe von Rekursionsrelationen selbst erzeugt.
Mit Hilfe der Substitution (6.29) und den Stützstellen und Gewichten des GaussLegendre-Verfahrens nähert man das Integral in (6.25) durch
Z
0
∞
π
dq I(q) =
4
N
I(Q(z))
πX
I(Q(zi ))
π
≈
.
dz
wi
2
2
4 i=1
cos 4 (1 + z)
cos π4 (1 + zi )
−1
Z
1
(6.33)
Zu beachten ist noch, daß die Gewichte und Stützstellen für vorgegebenes N nur einmal
berechnet und dann gespeichert werden, da sie bei der Berechnung der Streuphasen
δ` (k) für beliebige Impulse k und Drehimpulse ` (bei gleichem N ) wiederverwendet
werden können.
Verwendet man die Quadraturformel (6.33) in der Integralgleichung (6.25), so entsteht mit den N Impulsen bzw. Wellenzahlen7
qn ≡ Q(zn )
7
mit
Q(z) ≡ µ tan
hπ
4
i
(1 + z)
(6.34)
Die konstante Wellenzahl (inverse Länge) µ muß aus Dimensionsgründen eingeführt werden. Sie
ist beliebig, sollte aber natürlich dem jeweiligen Problem angepasst werden.
12
PROJEKT 6. INTEGRALGLEICHUNGEN
des adaptiven Impulsgitters die algebraische Gleichung8
N
m X
µ·w
e
π n
×
K` (qi , qj ) = V` (qi , qj ) + 2
2
~ n=1 cos 4 (1 + zn )
×
qn2 Ve` (qi , qn )K` (qn , qj ) − qj2 Ve` (qi , qj ) K` (qj , qj )
.
qj2 − qn2
(6.35)
Diese Gleichung löst man am besten spaltenweise, d.h. für fixierten Index j. Im Detail
entsteht folgender Algorithmus:
1. Wähle Stützstellenzahl N
2. Bestimme (und speichere) die N Gewichte {wn } und die N Stützstellen
{zn } für z ∈ [−1, 1] nach gauleg
3. Berechne (und speichere) die N Wellenzahlen qn ≡ Q(zn ) nach (6.34)
4. Für ` = 0, 1, 2, . . .
4.1 Berechne und speichere die (N × N )-Matrix Vij ≡ Ve` (qi , qj ), cf. (6.23)
4.2 Definiere eine (N × N )-Matrix K = Kij
4.3 Für j = 1, . . . , N
• Berechne und speichere den N -komponentigen Vector
an ≡
µ · wn
m
.
2
2
~ cos π4 (1 + zn )
• Berechne und speichere die (N × N )-Matrix
q 2 Vin
an · 2n 2
;
qj − qn
!
Din ≡
N
X
ar qj2
Vij
;
− aj +
q2 − q2
r=1
j
n 6= j
(6.36)
n=j
r
• Sei V die j-te Spalte der Matrix V , d.h. Vi ≡ Vij . Löse das lineare
(N × N )-Gleichungssystem
K=V+D ·K
(6.37)
• Speichere den N -komponentigen Lösungsvektor K in der j-ten
Spalte von K , d.h. Kij = Ki .
4.4 Berechne und speichere die Phasenverschiebung auf den N Punkten
des Wellenzahlgitters {qi } mittels
2m qi
δ` (qi ) ≡ − arctan
Kii .
~2
8
Bei n = j benötigt man die Ersetzung
qn2 Ve` (qi , qn ) K` (qn , qj ) − qj2 V` (qi , qj ) K` (qj , qj )
−→ −Ve` (qi , qj ) K` (qj , qj ) .
qj2 − qn2
6.4. NUMERISCHE METHODEN
13
In der Praxis sollten die hier auftretenden Größen durch geeignete (dem jeweiligen
Problem entnommene) Skalen dimensionslos gemacht werden, wodurch auch alle expliziten Naturkonstanten wie ~ oder c verschwinden. Die Rekonstruktion der tatsächlichen
Einheiten kann dann, falls benötigt, in einem letzten Schritt 4.5 erfolgen.
6.4.2
Lösung des linearen Gleichungssystems
Die Gauß-Legendre-Quadratur hat die Integralgleichung (6.25) auf das lineare Gleichungssystem (6.37) mit N -komponentigen Vektoren reduziert, das für jeden Drehimpuls ` und für jeden linearen Impuls qj = Q(zj ) des einlaufenden Teilchens neu zu lösen
ist.
Es gibt eine große Anzahl von Routinen für die in (6.37) benötigte Matrixinversion.
Das einfachste Verfahren – Gauß-Jordan-Elimination mit Pivotierung – benötigt etwa N 3 arithmetische Operationen, so daß insgesamt zur Lösung der Integralgleichung
O(N 4 ) Operationen pro Drehimpulskanal notwendig sind. Für größere N empfiehlt es
sich daher, verbesserte Verfahren anzuwenden. In der Praxis haben sich für die speziellen System (6.37), die aus der Diskretisierung von Fredhom-Integralgleichungen ergeben, die conjugate gradient-Methode und verschiedene Zweigitterverfahren bewährt.
(Kompliziertere Mehrgitterverfahren bringen praktische keine Verbesserung.) Für die
effiziente Implementierung dieser Routinen sei auf die angegebene Literatur verwiesen.
6.4.3
Rekonstruktion der Kontinuumslösung
Falls die K-Matrix auch zwischen den Impuls-Stützstellen benötigt wird, so sollte man
nicht von benachbarten Stützstellen (linear) interpolieren. Es ist deutlich stabiler, zur
Berechnung die Integralgleichung selbst zu verwenden, also in (6.35) qi → k 0 und qj → k
zu setzen.
14
6.5
PROJEKT 6. INTEGRALGLEICHUNGEN
Aufgaben
Aufgabe 7.1:
Berechnen Sie (analytisch) die Fourier–Transformierte des Potentials
X e−µi r
V (r) =
Vi
.
µ
r
i
i
Bestimmen Sie hieraus mittels der Orthogonalität der Legendre–Polynome die Multipolterme Ve` (k 0 , k), siehe Gleichung (6.23).
Hinweis: Die Lösung lautet
Ve` (k 0 , k) =
1
k 2 + k 02 + µ2i
·
Q
(
)
`
µi 2kk 0
2kk 0
X Vi
i
) und
mit den irregulären Legendre–Funktionen Q` (α). Für α > 1 gilt Q0 (α) = 21 ln( α+1
α−1
Q1 (α) = αQ0 (α) − 1.
Aufgabe 7.2:
Wieviele Stützstellen brauchen Sie im Gauß–Legendre–Verfahren, um die Integrale
Z 1
dx ln2 (1 + x) = 2 ln2 (2) − 4 ln(2) + 2
Z0 1
π2
dx
ln(1 − x) = −ζ(2) = −
x
6
0
mit einer relativen Genauigkeit von 10−6 zu berechnen? Wieviele Stützstellen wären
mit der einfachen Trapezregel notwendig?
Aufgabe 7.3:
Ein Nukleon (mc2 = 940MeV) streue am Potential
V (r) = V0
e−2µr − e−µr
µr
mit V0 = 200MeV und µ = 2.5fm−1 .
Lösen Sie die Lippmann–Schwinger–Gleichung für die K–Matrix (6.25) für Die Drehimpulskanäle ` = 0 und ` = 1 in Born’scher Näherung. Berechnen Sie hiermit die
Streuphasen nach Gleichung (6.26).
Hinweis: mV0 /~2 = mc2 V0 /(~c)2 = 4.844 fm−2 mit ~c = 197 MeV fm.
Aufgabe 7.4 (weiterführend):
Ein realistisches Potential für die Nukleon–Nukleon–Streuung ist
e−4µr
e−7µr
e−µr
− 1650.6
+ 6482.2
MeV
V (r) = −10.463
µr
µr
µr
mit µ = 0.7 fm−1 . Lösen Sie die zugehörige Lippmann–Schwinger–Gleichung für die K–
Matrix mit der Nystrøm–Methode, und berechnen Sie die Streuphasen für ` = 0, 1, 2.
6.6. ANHANG: DIE METHODE DER VARIABLEN PHASE
6.6
15
Anhang: Die Methode der variablen Phase
Zur kontrolle der Numerischen Ergebnisse bietet sich ein einfaches Verfahren an, bei
dem das Steuproblem in eine Differentialgleichung umformuliert wird. Der Ausgangspunkt ist die reduzierte Radialgleichung (6.16). Im Falle V = 0 hat diese Gleichung
neben der schon betrachteten regulären Lösung eine bei r = 0 singuläre Lösung, die
wir als sphärische Hankelfunktion
r
1
π
(1)
(1)
iπ`
w` (kr) ≡ i e
kr H`+ 1 (kr) = eiπ(`+ 2 ) (kr) h` (kr)
2
2
wählen können. Bei großen Abständen lautet die asymptotische Form dieser freien
Lösung w` (kr) ≈ ei(kr+π`/2) . Man definiert nun die Jost-Lösung f` (k, r) als die Lösung
der reduzierten Radialgleichung (6.16) mit der Randbedingung
h
i
−i(kr+`π/2)
lim f` (k, r) · e
= 1,
(6.38)
r→∞
so daß sich f` (k, r) im freien Fall auf w` (kr) reduziert. Für ein reelles Potential folgt
aus der komplex konjungierten Schrödingergleichung und der Randbedingung (6.44),
daß f` (−k, r) = f` (k, r)∗ ebenfalls eine Lösung der Radialgleichung (6.16) ist. Da die
Wronksi-Determinante der beiden Lösungen f` (±k, r) konstant ist, kann sie etwa bei
r → ∞ berechnet werden, wo (6.44) auf W [f` (k, r), f` (−k, r)] = (−1)`+1 2ik 6= 0 führt.
Somit sind die beiden Jost-Lösungen f` (±k, r) für k 6= 0 linear unabhängig, und jede
andere Lösung der radialen Schrödingergleichung (6.16) kann als Linearkombination
dieser beiden Basislösungen ausgedrückt werden,
uk` (r) = A` (k) f` (−k, r) + B` (k) f` (k, r) .
(6.39)
Am Ursprung r → 0 dominiert die Zentrifugalbarriere in (6.16), so daß die Jost-Lösung
bis auf eine andere Normierung mit der Asymptotik der freien Jost-Lösung übereinstimmen muß,
lim
r→0
f` (k, r)
f` (k, r)
= lim
≡ F` (k) .
`
r→0
w` (kr)
(−1) (2` − 1)!! (kr)−`
(6.40)
Die sog. Jost-Funktion F` (k) enthält bereits die gesamte Information über den Streuprozeß. Um dies zu erkennen betrachtet man die Zerlegung (6.45) für die Radialfunktion
uk` (r) der Streulösung (6.15). Da die Streulösung bei r = 0 aus physikalischen Gründen
regulär sein muß, folgt aus (6.15) und (6.45) unmittelbar
B`
F` (−k)
= −(−1)`
A`
F` (k)
und daher
n
o
` F` (−k)
uk` (r) = A` f` (−k, r) − (−1)
f` (k, r) .
F` (k)
(6.41)
Wegen f` (−k, r) = f` (k, r)∗ und der entsprechenden Relation für die freie Jost-Lösung
w` (kr) gilt aber auch F` (−k) = F` (k)∗ . Setzt man
F` (k) = |F` (k)| · e−iδ` (k) ,
(6.42)
16
PROJEKT 6. INTEGRALGLEICHUNGEN
so folgt für das Verhältnis der Jost-Funktionen in (6.47)
F` (−k)
F` (k)∗
S` (k) ≡
=
= e2iδ` (k) .
F` (k)
F` (k)
Mit der asymptotischen Form (6.44) erhält man also bei r → ∞ für die physikalische
(reguläre) Streulösung
uk` (r) = A` · 2i eiδ` (k) sin(kr − `π/2 + δ` (k)) .
Vergleicht man mit der erwarteten asymptotischen Form (6.18), so findet man A` =
i`−1 (2` + 1)/(2k) und die Streuphase δ` (k) erweist sich gerade als die Phase der komplexen Jost-Funktion F` (k).
Zur numerischen Berechnung der Jost-Funktion geht man vom Ansatz
f` (k, r) = w` (kr) · eiβ` (k,r)
(6.43)
mit einer noch unbestimmten komplexen Funktion β` (k, r) ( variable Phase“) aus. Die
”
Jost-Randbedingung (6.44) führt auf
lim β` (k, r) = lim β`0 (k, r) = 0 ,
r→∞
r→∞
(6.44)
wobei der Strich die Ableitung nach r andeutet. Setzt man den Ansatz (6.49) in die
radiale Schrödingergleichung (6.16), so folgt nach kurzer Rechnung die nicht-lineare
Differentialgleichung
2 2m
−iβ`00 (k, r) + 2kξ` (kr) β`0 (k, r) + β`0 (k, r) + 2 V (r) = 0
~
d
w0 (z)
ξ` (z) ≡ −i
ln w` (z) = −i `
.
dz
w` (z)
(6.45)
Die Koeffizienten ξ` (z) ergeben sich hierbei als einfache rationale Funktionen von z;
z.B. ist ξ0 (z) ≡ 1.
Die Differentialgleichung (6.51) muß nun von r 1 mit den Randbedingungen
(6.50) nach r → 0 integriert werden, wo dann die Streuphase direkt abgelesen werden
kann:
f` (k, r)
= −arg eiβ` (k,0) = −Re β` (k, 0) .
r→∞ w` (kr)
δ` (k) = −arg F` (k) = −arg lim
Numerisch ist es vorteilhaft, für fixes ` und k den Real- und Imaginärteil von β` (k, r)
und seiner ersten Ableitung in einen 4-komponentigen reellen Vektor
b(r) ≡ Re β` (k, r), Im β` (k, r), Re β`0 (k, r), Im β`0 (k, r)
6.7. LITERATUR
17
zu packen und das reelle Differentialgleichungssystem 1. Ordnung für b(r) mit der
Randbedingung b(∞) = 0 nach r = 0 zu integrieren; die Streuphase folgt dann aus
δ = −b1 (0). Zur Integration der Differentialgleichung genügt i.a. ein einfaches RungeKutta-Verfahren mit adaptiver Schrittweite. Für weitere Details sei auf die angegebene
Literatur, insb. The Numerical Recipes von Press et al., verwiesen.
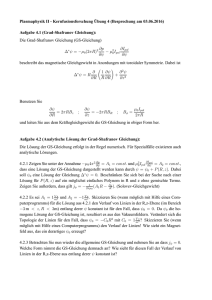
Die Differentialgleichungsmethode kann in wenigen Zeilen als Mathematica-Programm implementiert werden. Abbildung 6.6 zeigt den Vergleich der Integral- und Differentialgleichungsmethode für das Potential aus Aufgabe 7.3 in den Drehimpulskanälem
` = 0, 1. Offenbar stimmen beide Methoden vollständig überein.
0.5
0.2
integral equation
variable phase
integral equation
variable phase
0.4
0.15
δ1(q)
δ0(q)
0.3
0.1
0.2
0.05
0.1
0
0
1
2
3
4
5
0
0
1
q=k/µ
2
3
4
5
q=k/µ
Abbildung 6.1: Vergleich der Phasenverschiebung aus der spektralen Methode und der
Integralgleichungsmethode, jeweils für den Drehimpulskanal ` = 0 (links) und ` = 1
(rechts).
6.7
Literatur
• F. Schwabl, Quantenmechanik (QM I), Springer Verlag
• A. Messiah, Quantenmechanik, deGruyter Verlag
• W. Glöckle, The quantum mechanical few-body problem, Springer Verlag (1983)
• N. Graham, M. Quandt, H. Weigel, Spectral Methods in Quantum Field Theory,
Springer Verlag (2009)
• W.H. Press, S.A. Teukolsky, W.T. Vetterling, Numerical Recipes in C++: The
art of scientific computing
• W. Hackbusch, Integral Equations, Birkhäuser Verlag (1995)