Zur Simulation von Haftreibung und mechanischen Anschlägen
Werbung

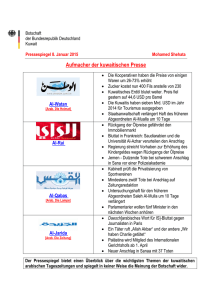
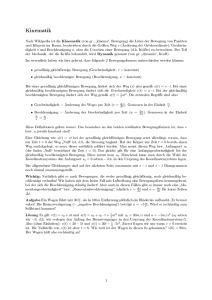
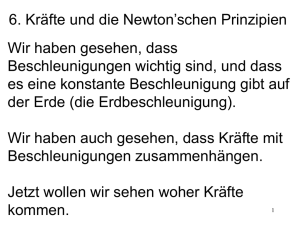
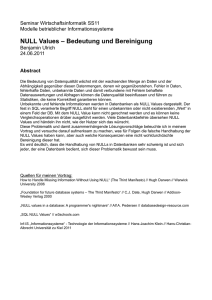
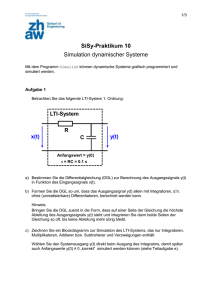
Zur Simulation von Haftreibung und mechanischen Anschlägen Heinz A. Gall Maschinenbau, Berufsakademie in Horb e-mail: [email protected] 1999 Kurzfassung Die besonderen Eigenschaften von Zwangskräften liefern einen Ansatz für die Modellierung von Haftreibung und mechanischen Anschlägen. Dabei werden Auslenkung, Geschwindigkeit und Beschleunigung ereignisgesteuert auf feste Werte gesetzt. Dies ist möglich, da die Lösung der Bewegungsgleichung in Bindungsrichtung bekannt ist, sobald Zwangskräfte auftreten. Die Integrationsroutinen müssen dazu über die Möglichkeit verfügen, einzelne Zustandsgrößen zu setzen, während die anderen Zustandsgrößen weiter integriert werden. Seit der Version 2 verfügt SIMULINK über die notwendigen Setzmöglichkeiten. So wird der beschriebene Ansatz z.B. in der Simulinkdemo „Friction Model with Hard Stops in Simulink 3“ teilweise realisiert. Leider sind nicht alle Aspekte des Modellierungsansatzes berücksichtigt. Der Beitrag möchte die grundlegenden Gedanken und Hintergründe der Modellbildung von Haftreibung und mechanischen Anschlägen durch Setzen von Systemzuständen aufzeigen und am Beispiel einer SIMULINKRealisierung verdeutlichen. 1. Einleitung Bei der Simulation mechanischer Systeme tritt immer wieder das Problem der harten mechanischen Anschläge auf. Beispielsweise ist die Steuerkolbenbewegung eines Hydraulikventils oder der Kolbenweg eines Hydraulikzylinders durch Anschläge begrenzt. Eine einfache, aber wenig vorteilhafte Methode, solche Anschläge zu simulieren, basiert auf der Vorstellung, daß es sich bei Anschlägen um sehr steife, aber doch nachgiebige Bauteile handelt. Dementsprechend modelliert man harte Anschlagfedern und entsprechend starke Anschlagdämpfer. Problematisch ist dann die Wahl der Feder- und Dämpferkonstanten. Da diese Parameter nicht direkt aus den technischen Gegebenheiten abgeleitet werden können, erkennt man, daß Anschlag-federn und – dämpfer oft nur Hilfskonstruktionen sind, um Anschläge überhaupt simulieren zu können. Simulationstechnische Schwierigkeiten entstehen auch dadurch, daß das mechanische System durch die harten Federn im Anschlagbereich relativ hochfrequent wird, was z.B. zu kleinen Integrationsschrittweiten und großen Rechenzeiten führt. Die in diesem Beitrag beschriebene Vorgehensweise entspringt einer anderen Anschauung über die physikalische Wirkungsweise von Anschlägen. Dabei werden keine Aussagen über die Vorgänge während des Anschlagens gemacht. Vielmehr betrachtet man das Auftreffen auf einen Anschlag als ein Zustandsereignis. 2. Ein Ausflug in die Technische Mechanik Ist ein Körper durch materielle Bindungen mit anderen Körpern verbunden, dann hat man eine geführte Bewegung. Die Bewegungsfreiheit des Körpers ist durch die starren Verbindungen eingeschränkt. Rollt z.B. eine Kugel auf einem Tisch, dann sorgt der materielle Kontakt zwischen Tisch und Kugel dafür, daß die Kugel nicht in den Tisch eindringt. Dies geschieht dadurch, daß in der Bindung eine Zwangskraft erzeugt wird, die zu jedem Zeitpunkt genau so groß ist, daß Seite 1 in Richtung der Tischplatte Kräftegleichgewicht herrscht. 3. Anschlagmodellierung Für die Modellierung mechanischer Anschläge ergibt sich aus der oben beschriebenen Einsicht folgende Vorgehensweise. Die Vorstellung, daß in materiellen Bindungen Zwangs- oder Reaktionskräfte entstehen, die genau so groß sind, daß sie eine Bewegung gerade verhindern, kann bei der Modellbildung von harten Anschlägen verwendet werden. Man unterscheidet zwei Zustände, in denen sich das System befinden kann: a) Freie Bewegung (Fz = 0) Es wirken keine Anschläge, d.h. keine geometrischen Zwänge. Die Masse bewegt sich entsprechend der Differentialgleichung (1), wobei als Kräfte F nur eingeprägte Kräfte Fe in Erscheinung treten (Gewicht, Feder- und Dämpferkräfte, Gleitreibung, hydraulische Druckkräfte, usw.). b) Erzwungener Stillstand (Fz ≠ 0) Bild 1: Feder-Masse-System mit Anschlägen Wird z.B. ein Ventilkolben durch die einwirkenden eingeprägten Kräfte Fe gegen einen Anschlag gedrückt, dann entsteht zwischen Ventilkolben und Anschlag eine materielle Verbindung, die jede Bewegung unterdrückt. Die Auslenkung x wird in diesem Zustand auf dem Anschlagswert xa festgehalten. Die Geschwindigkeit ist Null und auch die Beschleunigung verschwindet, solange die einseitige geometrische Bindung in der Lage ist, Kräftegleichgewicht herzustellen. Die Beschleunigung wird deshalb zu Null, weil der Anschlag auf den Kolben eine Zwangskraft Fz ausübt, die immer genau so groß ist, daß die Summe aller Kräfte am Kolben gleich Null ist (1). Beim Übergang von freier Bewegung zum erzwungenen Stillstand tritt das Zustandsereignis „Stoß“ auf. Zur Steuerung der Simulation verwendet man logische Bedingungen, die Auskunft darüber geben, ob gerade ein Stoß eingetreten ist und ob sich das System im Zustand des erzwungenen Stillstandes befindet oder nicht. •• m ⋅ x = ∑ F = ∑ Fe + ∑ Fz Die Masse befindet sich an einem Anschlag. In der materiellen Bindung treten Zwangskräfte auf, die genau so groß sind, daß die Summe aller Kräfte gleich Null ist. Solange der Körper gegen den Anschlag gedrückt wird, bleibt die Auslenkung x auf dem Anschlagswert xa festgehalten. Die Geschwindigkeit ist Null und es tritt auch keine Beschleunigung auf. Da somit die Lösung der Bewegungsgleichung (1) bekannt ist, kann man diese Lösung in das Simulationsmodell einbauen. (1) 4. Anforderungen an ein Simulationspaket Da der Anschlag nur Druck- aber keine Zugkräfte aufbringen kann, wirkt der Anschlag nur so lange, wie die angreifenden eingeprägten Kräfte Fe den Kolben in Richtung des Anschlages drücken. Oft können Begrenzungen dadurch simuliert werden, daß man den Eingang eines Integrators auf Null setzt und somit eine Zustandsgröße auf dem momentanen Wert festhält. Dies reicht für die Realisierung der oben dargestellten Anschlagsmodellierung nicht aus. Vielmehr benötigt man Integrationsroutinen, bei Seite 2 denen einzelne Zustandsgrößen auf vorgebbare Werte gesetzt werden können. Die nicht gesetzten Zustandsgrößen werden währenddessen normal weiterintegriert. Seit MATLAB 5/ SIMULINK 2 steht in SIMULINK die notwendige Beeinflussungsmöglichkeit der Integratoren zur Verfügung. Dabei ist zu beachten, daß das Setzen eines Integrators nicht statisch, in Abhängigkeit eines Zustandes erfolgt, sondern dynamisch, bei einem Zustandswechsel. Man muß daher dafür sorgen, daß die gesetzten Integratoren festgehalten werden, solange die entsprechenden Zustände andauern. ( x ≥ x a ) UND ( ∑ Fe ≥ 0) 6. Realisierung mit SIMULINK Nachfolgend soll die Realisierung der vorgeschlagenen Anschlagmodellierung mit SIMULINK 3 aufgezeigt werden. Eine komfortable Zustandsbehandlung steht in der Sprache DYMOLA oder mit der SIMULINK-Erweiterung STATEFLOW zur Verfügung. Bild 1 zeigt das zugrundegelegte mechanische System mit zwei Anschlägen bei x = xa bzw. bei x = xb. Es wird ein plastischer Stoß angenommen. 5. Strategie Will man die vorgeschlagene Anschlagsmodellierung anwenden, dann kommt den boolschen Setzbedingungen eine zentrale Bedeutung zu. Man muß die Frage beantworten, unter welcher Bedingung die Auslenkung x auf den Anschlagswert xa bzw. die Geschwindigkeit auf Null gesetzt werden muß. 1. Erreicht der Körper den Anschlag, dann tritt das Ereignis „Stoß“ ein. Die Auslenkung x wird auf den Anschlagswert xa und die Geschwindigkeit wird auf Null gesetzt. Setztbedingung (dynamisch): x ≥ xa ( 2) (3) 3. Ansonsten wird die Bewegungsgleichung ohne jedweden Eingriff integriert. In der Simulationssprache ACSL wird die Ereignissteuerung mit der SCHEDULEOperation bewerkstelligt. Für einen einseitigen Anschlag beim Auslenkungswert xa und unter der Annahme eines plastischen Stoßes, kann die Setzstrategie folgendermaßen aussehen: 2. Wird der Körper von den eingeprägten Kräften gegen den Anschlag gedrückt, herrscht der Zustand „Erzwungener Stillstand“. Die Auslenkung x wird auf dem Anschlagswert xa und die Geschwindigkeit wird auf Null festgehalten. Dies wird durch das Nullsetzen der Beschleunigung bewerkstelligt. Haltebedingung (statisch): Die freie Bewegung wird durch folgende Gleichungen beschrieben • x = xp • 1 xp = (−c ⋅ x − d ⋅ xp + c ⋅ x e ) m (4) Bild 2 zeigt das SIMULINK-Modell. Alle für die Anschlagmodellierung notwendigen Blöcke sind durch Schatten gekennzeichnet. Für die Integratorbeeinflussung stehen in SIMULINK zwei Eingriffsmöglichkeiten zur Verfügung. Die Integratorsättigung (Limit output) und das externe Setzen (External reset). Dabei ist zu beachten, daß das externe Setzen dynamisch erfolgt. Man setzt den Integrator also nicht solange ein Zustand andauert, sondern beim Eintreten eines Ereignisses (Zustandswechsel). Seite 3 c d 0 Schaltbedingung Mux ((u(2)==1)&&(u(1)>=0)) || ((u(2)==-1)&&(u(1)<=0)) 1/m xpp Beschleunigung 1 s |u| Summe der eingeprägten Kräfte Fe c Schalter Anregung xe Abs xp Geschwindigkeit x 1 s Integrator2 Integrator1 Steuersignal: 1...rechter Anschlag erreicht; -1...linker Anschlag erreicht Bild 2: SIMULINK-Modell mit Anschlägen Dementsprechend erfolgt die Integratorensteuerung folgendermaßen: 1. Die Auslenkung x wird, durch die Begrenzungen des Integrators2, auf den Anschlagswerten xa bzw. xb festgehalten. Ist die Auslenkung x in der Sättigung, dann wird dies durch das Steuersignal am „saturation port“ angezeigt. 2. Mit dem Steuersignal aus dem Integrator2 wird die Geschwindigkeit xp (Integrator1) dynamisch, d.h. beim Zustandswechsel, auf Null gesetzt, sobald ein Anschlag erreicht ist. Da am saturation port auch beim Verlassen der Begrenzung Signalwechsel erfolgen, wird die Betragsbildung (Abs) und die aufsteigende Flanke benutzt. Dadurch ist sichergestellt, daß die Geschwindigkeit nur beim Erreichen eines Anschlages auf Null gesetzt wird. 3. Damit die Geschwindigkeit xp auch solange auf Null bleibt, solange die Masse gegen den Anschlag gedrückt wird, hält man die Beschleunigung xpp (Eingang des Integrators1) auf Null, solange ein Anschlag wirkt. Schaltbedingung: [( x ≥ x a ) UND ( ∑ Fe ≥ 0)] ODER [( x ≤ x b ) UND ( ∑ Fe ≤ 0)] (5) Bild 3 zeigt beispielhaft ein Simulationsergebnis: Nachdem zur Zeit t = 0.1s die Eingangsgröße xe einen Sprung von 0 auf 0.1 Meter gemacht hat, bewegt sich die Masse in Richtung des rechten Anschlages. Bei x = xa = 0.05m stößt die Masse plastisch gegen den Anschlag. Da die Feder die Masse gegen den Anschlag drückt, bleibt die Geschwindigkeit xp gleich Null und auch die Beschleunigung xpp verschwindet. Erst wenn die Eingangsgröße xe bei t = 1,1s wieder auf Null zurückgeht, löst sich die Masse vom Anschlag. Durch ihr Überschwingen tippt sie noch am linken Anschlag an, ohne dort für längere Zeit liegenzubleiben. Die Simulation zeigt, daß die drei entscheidenden Vorgänge, „Anstoßen und Anliegen“, „vom Anschlag lösen“ sowie „Antippen“ vom Modell richtig wiedergegeben werden. 7. Teilelastischer Stoß Soll bei der Simulation berücksichtigt werden, daß der Körper beim Aufprall zurückspringt, dann muß beim Stoß eine Geschwindigkeitsumkehr modelliert werden. Bild 4 zeigt, durch Schatten gekennzeichnet, die notwendige Erweiterung des SIMULINK-Modells. Die Dead Zone ist erforderlich, damit die Masse nicht unendlich oft und dabei sehr hochfrequent prellt. Seite 4 Auslenkung Xa = 0.05m Antippen am linken Anschlag 0.04 0.02 0 -0.02 -0.04 plastischer Stoß am rechten Anschlag 0 0.2 0.4 0.6 Lösen vom rechten Anschlag 0.8 1 1.2 Xb = -0.02m 1.4 1.6 1.8 2 1.2 1.4 1.6 1.8 2 1.2 1.4 1.6 1.8 2 1 Nullsetzen der Geschwindigkeit (Stoß) 0.5 0 -0.5 0 Beschl. xpp [m/s 2] Geschwind. xp [m/s] Auslenkung x [m] Bewegungsgrößen 0.2 0.4 0.6 0.8 1 4 2 Beschleunigung auf Null halten 0 -2 0 0.2 0.4 0.6 0.8 1 Zeit [s] Bild 3: Simulationsergebnisse c d Integrator1 0 Schaltbedingung Mux ((u(2)==1)&&(u(1)>=0)) || ((u(2)==-1)&&(u(1)<=0)) xpp 1/m Beschleunigung c 1 |u| s Anregung xe Abs [0] IC k Stoßzahl Bild 4: SIMULINK-Modell mit elastischem Stoß Seite 5 Dead Zone xp Geschwindigkeit x 1 s Integrator2 Auslenkung Die Stoßzahl k gibt das Verhältnis der Geschwindigkeiten vor und nach dem Stoß an. v nachher = k ⋅ v vorher anhalten kann. So kommt eine Masse auf einer schiefen Ebene nicht vollständig zur Ruhe, da immer eine kleine Geschwindigkeit erforderlich ist, um der Hangabtriebskraft entgegenzuwirken. (6) 0.04 0.02 0 -0.02 -0.04 2 Im Gegensatz zur Gleitreibung ist die Haftreibung eine Zwangskraft. Dementsprechend ist die Haftreibungskraft immer genau so groß, daß sie den anderen Kräften das Gleichgewicht hält und damit jede Bewegung verhindert (Auslenkung festgehalten, Geschwindigkeit gleich Null). Erst wenn die anderen am Körper angreifenden Kräfte von der Haftreibung nicht mehr gehalten werden können, tritt eine Bewegung auf. 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.2 0.4 0.6 0.8 1 Zeit [s] 1.2 1.4 1.6 Analog zum Anschlag läßt sich daher die Haftreibung als Zwangskraft modellieren. Bild 7 gibt das zugehörige SIMULINK-Modell wieder. 1 0.5 0 -0.5 Beschl. xpp [m/s ] Geschwind. xp [m/s] Auslenkung x [m] Bewegungsgrößen 4 2 0 -2 1.8 Bild 5: Simulationsergebnisse bei teilelastischem Stoß 2 1. Das Ereignis „Eintritt in die Haftreibung“ tritt nur auf, wenn die Relativgeschwindigkeit Null ist bzw. einen Nulldurchgang hat (Hit Crossing Block) UND die Summe aller eingeprägten Kräfte kleiner-gleich der maximal möglichen Haftreibungskraft ist. Bei einer Stoßzahl von k = 0 handelt es sich um einen plastischen Stoß. Ist k = -1, dann hat man einen vollelastischen Stoß. Beim wirklichen Stoß liegt k zwischen 0 und –1. Für einen teilelastischen Stoß (k = -0,6; tote Zone = ±0,05 m/s; sonst alles wie für Bild 3) sind in Bild 5 Simulationsergebnisse dargestellt. Man erkennt deutlich das Zurückspringen der Masse und die Geschwindigkeitsumkehr. • x=0 UND ∑ Fe ≤ FHaft ,max = µ 0 ⋅ FN ( 7) 8. Haftreibung Oft wird Reibung durch Schlupfkurven (Reibkraft über Relativgeschwindigkeit) modelliert. Die Haftreibung wird dabei durch einen steilen Kraftanstieg im Bereich kleiner Geschwindigkeiten nachgebildet (Bild 6). Neben numerischen Schwierigkeiten durch die sehr große Verstärkung im Geschwindigkeitsnullpunkt, hat diese Methode den Nachteil, daß der reibungsbehaftete Körper nicht so richtig Die Geschwindigkeit xp (Integrator1) wird in diesem Fall auf Null gesetzt. 2. Solange die Summe der eingeprägten Kräfte betragsmäßig kleiner-gleich der maximal möglichen Haftreibungskraft FHaft,max = µ0*FN ist, befindet sich das System im Zustand „Verharren in der Haftreibung“. Dabei sorgt die Haftreibung als Reaktionskraft für Seite 6 Kräftegleichgewicht. Die Beschleunigung xpp ist Null. Dadurch bleibt auch die Geschwindigkeit xp bei Null stehen. Die Auslenkung x wird auf dem momentanen Wert festgehalten. Reibkraft Geschwindigkeit 3. Tritt keine Haftreibung auf, dann kann z.B. Gleitreibung als eingeprägte Kraft wirken. • FR = −sign( x ) ⋅ µ ⋅ FN (8) In Bild 8 sind Simulationsergebnisse dargestellt. Die Anregung springt bei der Zeit t = 0.1s von Null auf xe = 0.1m. Nach einem Einschwingvorgang kommt die Masse bei t = 1,1s in der Haftreibung zur Ruhe. Die Auslenkung entspricht dabei nicht der Anregung! Die Geschwindigkeit xp ist exakt gleich Null. Bei t = 1,3s geht die Anregung sprunghaft auf Null zurück. Die Masse befreit sich aus der Haftreibung. Bild 6: Reibkraft eines Hydraulikzylinders In der Beschleunigung xpp ergeben sich Nadelimpulse, die das Simulationsergebnis aber praktisch nicht beeinflussen. Die Peaks entstehen beim Beginn einer Bewegung, da die Gleitreibung erst nach einem ersten Integrationsschritt (ab einer Geschwindigkeit xp ≠ 0) sprunghaft wirkt. c Geschwindigkeit d Switch Integrator1 0 xpp 1/m Gleitreibungsreibungsmodell Beschleunigung mue*FN*u(1) Integrator2 Sign Gleitreibung 1 s c Anregung xe Haftreibungsmodell xp (u(2)==1)&&(abs(u(1))<=u(3)) Nulldurchgang Geschwindigkeit mue0*FN Schaltbedingung Max Haftreibung Geschwindigkeit Bild 7: SIMULINK-Modell mit Gleit- und Haftreibung Seite 7 xp 1 s x Auslenkung Xe 0.1 Haftreibung 0 -0.1 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 1.8 2 1.8 2 0.5 Haftreibung 0 -0.5 Beschl. xpp [m/s 2] Geschwind. xp [m/s] Auslenkung x [m] Bewegungsgrößen 0.2 -1 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 5 Haftreibung 0 -5 0 0.2 0.4 0.6 0.8 1 Zeit [s] 1.2 1.4 1.6 Bild 8: Simulationsergebnisse: Feder-Masse-Schwinger mit Gleit- und Haftreibung 9. Schlußbemerkung Beim Auftreten von Zwangskräften (materiellen Bindungen und Haftreibung) erfolgt ein Strukturwechsel im mechanischen System. Dieser führt dazu, daß die Lösung der Bewegungsgleichungen für die betroffene Größe bekannt ist. Es herrscht nämlich Ruhe infolge von Kräftegleichgewicht. Durch Ereignissteuerung (Setzen und Anhalten von Integratoren) kann diese bekannte Lösung in die Simulation eingebracht werden. Bei ersten Versuchen („selbstgestrickte“ setzbare Integrationsroutinen mit fester Schrittweite) hat sich diese Vorgehensweise als sehr gutmütig erwiesen. Im Vergleich zu Anschlagfedern und –dämpfern konnten ex- trem große (feste) Schrittweiten verwendet werden (Faktor 1000). Es traten keinerlei numerische Probleme auf. Seit es in SIMULINK setzbare Integratoren gibt, wird die Vorgehensweise an der Berufsakademie in Horb z.B. bei der Simulation von Hydrauliksystemen erfolgreich eingesetzt. Auch wenn gelegentlich Warnmeldungen wegen algebraischer Schleifen auftreten, sind die Erfahrungen sehr positiv. Abschließend kann festgestellt werden, daß man mit der vorgestellten Methode über eine erprobte, funktionierende und leistungsfähige Vorgehensweise zur Simulation von Haftreibung und harten Anschlägen verfügt. Seite 8