sisylab10simdynsys
Werbung

ZHAW, SiSy, Rumc
1/3
SiSy-Praktikum 10
Simulation dynamischer Systeme
Mit dem Programm Simulink können dynamische Systeme grafisch programmiert und
simuliert werden.
Aufgabe 1
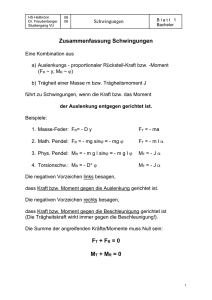
Betrachten Sie das folgende LTI-System 1. Ordnung:
LTI-System
R
x(t)
C
y(t)
Anfangswert = y(0)
τ = RC = 0.1 s
a) Bestimmen Sie die Differentialgleichung (DGL) zur Berechnung des Ausgangssignals y(t)
in Funktion des Eingangssignals x(t).
b) Formen Sie die DGL so um, dass das Ausgangssignal y(t) allein mit Integratoren, d.h.
ohne (unrealisierbare) Differentiatoren, berechnet werden kann.
Hinweis:
Bringen Sie die DGL zuerst in die Form, dass auf einer Seite der Gleichung die höchste
Ableitung des Ausgangssignals y(t) steht und integrieren Sie dann beide Seiten der
Gleichung so oft, bis keine Ableitung mehr übrig bleibt.
c) Zeichnen Sie ein Blockdiagramm zur Simulation des LTI-Systems, das nur Integratoren,
Multiplikatoren, Addierer bzw. Subtrahierer und Verzweigungen enthält.
Wählen Sie den Systemausgang y(t) direkt beim Ausgang des Integrators, damit später
auch Anfangswerte y(0) ≠ 0 „korrekt“ simuliert werden können (siehe Teilaufgabe e).
ZHAW, SiSy, Rumc
2/3
d) Erstellen Sie in Simulink das System-Modell und simulieren Sie das Systemverhalten
im Zeitbereich 0 ≤ t ≤ 1s, wenn am Eingang das Schrittsignal x(t) = u(t-t0) anliegt, wobei
t0 = 0.5 s, und der Anfangswert y(0) = 0.
Hinweise:
- Starten Sie das Programm Simulink durch Eingabe von >> simulink und öffnen
Sie ein neues Modell oben links im Simulink Library Browser.
- Die Quelle step finden Sie mit dem Simulink Library Browser unter sources.
- Konfigurieren Sie die Quelle step mit der step time t0 = 0.5 s und der
sampling time = 0.1 ms.
- Die Senke scope finden Sie mit dem Simulink Library Browser unter sinks.
- Konfigurieren Sie die data history im scope so, dass die letzten 10000
Samples angezeigt werden.
- Verbinden Sie die Quelle mit der Senke und simulieren Sie das System y(t) = x(t),
nachdem Sie in den Model Configuration Parameters unter simulation
den Zeitbereich 0 ≤ t ≤ 1s eingestellt haben.
- Vervollständigen Sie nun das ganze System-Modell. Den Block integrator finden
Sie mit dem Simulink Library Browser unter continuous, und die Blöcke gain und
subtract unter math operations.
e) Wiederholen Sie die System-Simulation, wenn der Anfangswert y(0) = 5 beträgt.
Hinweis:
Der Anfangswert kann im Integrator-Block eingestellt werden und bezieht sich auf den
Integrator-Ausgang.
Aufgabe 2
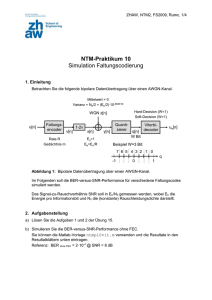
Betrachten Sie das folgende ungedämpfte Feder-Pendel (keine Reibung):
Ruhelage
k
y(t)
F = -k·y
m
m
y
0
a)
Bestimmen Sie die DGL zur Berechnung der Auslenkung y(t) in Funktion der Masse m
und Federkonstante k, siehe auch http://de.wikipedia.org/wiki/Harmonischer_Oszillator,
Abschnitt 4.1.2 „Herleitung der Schwingungsgleichung“.
ZHAW, SiSy, Rumc
b)
3/3
Zeichnen Sie ein Blockdiagramm zur Simulation der Auslenkung y(t), das wieder nur
Integratoren, Multiplikatoren, Addierer bzw. Subtrahierer und Verzweigungen enthält.
Wählen Sie den Systemausgang y(t) wieder direkt beim Ausgang des 2. Integrators.
Hinweis:
Sie können das Feder-Pendel als LTI-System 2. Ordnung betrachten, das mit den
Anfangsbedingungen y(0) = y0 und dy(0)/dt = v0 sich selbst überlassen wird, d.h. kein
Eingangssignal x(t) aufweist.
c)
Erstellen Sie im Simulink das System-Modell und simulieren Sie die Auslenkung y(t)
im Zeitbereich 0 ≤ t ≤ 10 s mit den folgenden Parametern:
y0 = 0 m, v0 = 1 m/s, m = 1 kg und k = 40 kg/s2.
Wie gross ist die maximale Auslenkung und mit welcher Frequenz schwingt das Pendel?
Sie müssen für die Simulation eine Sampling-Zeit wählen. Dafür haben Sie die folgenden Möglichkeiten:
- Sie können die (Pseudo-) Quelle constant verwenden und sie mit dem Wert 0
und der sampling time = 1 ms parametrisieren.
- Sie können aber auch ohne source arbeiten und die Sampling-Zeit in den Model
Configuration Parameters einstellen.
d)
Wählen Sie andere Parameter und beobachten Sie die Auslenkung y(t).
Hinweise:
- Sie können die Simulink-Blöcke mit den Variablen y0, v0, m und k konfigurieren.
Simulink kennt die entsprechenden Werte, wenn Sie sie zuerst in Matlab verwenden,
z.B. in der folgenden Form: >> y0=1; v0=0; m=1; k=100;
- Sie können die Simulink-Simulation auch vom Matlab aus starten mit
>> sim('MODEL').
e)
Versuchen Sie, die zu Grunde liegende DGL zu lösen (ohne Anfangsbedingungen) und
erklären Sie den Einfluss der einzelnen Parameter auf die Auslenkung y(t).
f)
Ergänzen Sie Ihr Feder-Pendel-Modell mit einer Reibungskraft FR, die proportional zur
Geschwindigkeit ist, nämlich FR = - 2∙m∙ξ∙dy(t)/dt, und simulieren Sie wieder die
Auslenkung y(t), wenn ξ = 1 Hz.
Verwenden Sie weiterhin nur 2 Integratoren.