Kapitel 4 - antriebstechnik.fh
Werbung

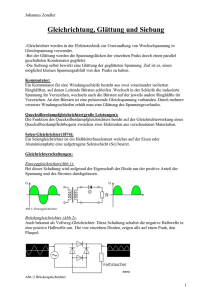
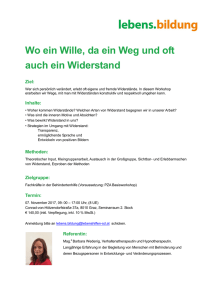
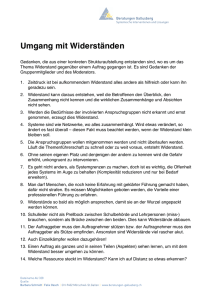
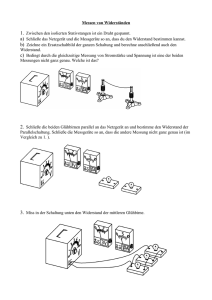
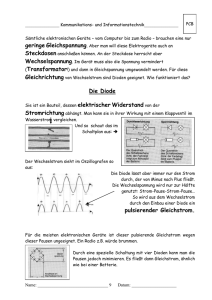
4 Glättung Übungsziel: • Einfluss des Speichers C auf die Gleichspannung u d und auf den Gleichstrom id • Einfluss des Speichers L auf die Gleichspannung u d und auf den Gleichstrom id • Einfluss des Speichers und Steuerwinkels auf die Gleichstromle istung Pdα • Beurteilung der Leistungsfunktion über der Zeit Übungsdateien: MATHCAD: SIMPLORER: 4.1 m1rc.mcd und m1rl.mcd m1rc.ssh; m1rld.ssh und m1r l.ssh Kapazitive Glättung Gleichströme und Gleichspannungen sind in Stromrichterschaltungen von Wechselanteilen überlagert. Der Gleichanteil dieser Mischgrößen ist ein arithmetischer Mittelwert und wird durch große Buchstaben mit dem Index d angegeben. US ist der Effektivwert der speisenden Wechselspannung an der Netzseite der Stromric hterschaltung. Bild 4.1: Kapazitiv geglättete Einpulsschaltung Das RC-Glied wird durch den Thyristor geschaltet. Die Wechselspannung u S speist den Gleichstrom id im Kreis. Am Widerstand R fällt eine zeitlich veränderliche Gleichspannung u d ab. Bei unverändertem Steuerwinkel á stellt sich konstanter arithmetischen Mittelwert Ud ein. Durch den Thyristor fließt der Strom id . Dieser Gleichstrom fließt auch über die Wechselspannungsquelle. Der Gleic hstrom id teilt sich nach dem Knotenpunktsatz in die Ströme iR und iC. Die Gleichspannung u d entspricht dem Spannungsabfall u C am Kondensator (Bild 4.1). 4 Glättung 60 i Durchlasszeit Sperrzeit x u x Bild 4.2: Strom und Spannung bei kapazitivem Speicher In der Leistungselektronik müssen stets verschiedene Betriebszustände einer Schaltungsanordnung betrachtet werden, da der Halbleiterschalter Stromkreise auftrennt oder verbindet. Bild 4.2 zeigt Strom- und Spannungsverläufe an verschiedenen Messpunkten der Schaltung. Die Zeit, in der das Ventil den Strom führt, heißt Stromführungszeit τd . Während dieser Zeitspanne entspricht die Gleic hspannung u d der speisenden Wechselspannung u S. Der Strom iR durch den Widerstand R hat die gleiche Kurvenform wie der Spannungsabfall am Widerstand u R. Sein arithmetischer Mitte lwert ist Id (Bild 4.3). Ausgehend von der jeweiligen Spannungsgleichgewichtsbedingung (Kirchhoffsches Gesetz), lässt sich eine Differenzialgleichung zur Berechnung des zeitlichen Verhaltens des Gleichstroms id aufstellen. 4.1 Kapazitive Glättung 61 Bild 4.3: Schaltzustand bei leitendem Ventil Die Gleichungen werden in den MATHCAD-Programmen der Programmsprache angepasst und zur Berechnung der Grafiken verwendet. Für die Zeitachse wird aus programmtechnischen Gründen immer ω t→ x gesetzt. Zustand 1: Der Halbleiterschalter ist im Intervall (x0 ≤ x ≤ x0 + τd ) geschlossen, siehe Bild 4.3: Aus u S ( x) = u C ( x) = u R ( x) folgt sin(x) id ( x) = 2U S + ωC cos(x) R (4.1) Der Strom fließt aus der Wechselspannungsquelle u S in die Bauelemente und setzt Wirkleistung am Widerstand R um. Der Speicher C wird aufgeladen. Der Gleic hstrom ist id = 0 nach Ablauf der Stromführungsdauer zum Zeitpunkt x = τd. Er kann wegen der Richtwirkung des Ventils nicht negativ werden. Bei τd öffnet das Ventil und schaltet den RC-Kreis von der Spannungsquelle ab. Die Schaltung geht in den Zustand 2 über. Zustand 2: Der Halbleiterschalter ist im Intervall (x0 +τd ≤ x ≤ 2π + x0 ) offen (Bild 4.4): Aus dem Ansatz u R = uV folgt der Strom, der aus dem Speicher C in den Widerstand R fließt: i R ( x ) = −i C ( x) = τ d + x0 − x 2U S sin( x0 + τ d ) e ωRC R (4.2) 4 Glättung 62 Bild 4.4: Ventil sperrend Am sperrenden Ventil fällt jetzt die Sperrspannung u V ab. Ihre Amplitude bestimmt die Spannungsfestigkeit des Bauteils. Der Sperrspannungsverlauf ist deshalb für die Dimensionierung der Spannungsfestigkeit von Halbleitern aus schlaggebend. Seine Amplitude ist ÛV = 2 US + Ud. Der aufgeladene Speicher C gibt während der Sperrzeit seine Energie an den Widerstand R ab, bis er entladen ist oder das Ventil erneut schließt. Die Stromrichtung am Kondensator wechselt das Vorzeichen. Der Speicher entlädt sich nach der abklingenden e-Funktion. Die Kapazität sollte so groß sein, dass die Gleichspannung u d möglichst zeitunabhängig also gut geglättet ist. 4.1.1 Vergleich der Simulationsergebnisse Jetzt soll beispielhaft das Verhalten der Spannungsglättung mit der Datei des MATHCAD-Programms m1rc.mcd untersucht werden. Die Datei gilt für eine Diodenschaltung. Die Ergebnisse der Ströme durch das Ventil, den Widerstand und den Kondensator zeigt Bild 4.5. Man kann deutlich den Sperrbereich vom Durchlassbereich unterscheiden, da der Ventilstrom im Sperrbereich Null ist. Nur im Durchlassbereich wird Energie aus dem Netz aufgenommen. Im Sperrbereich entlädt sich der Speicher über den Widerstand, so dass beide Ströme gleich groß sind (iC = iR) und mit unterschiedlichem Vorzeichen nach einer e-Funktion abklingen. Die gestrichelte Linie entspricht dem Mittelwert Id . Die gleichen Ergebnisse zeigt die Grafik des QuickViews (Bild 4.6) der SIMPLORER-Datei m1rcd.ssh, die eine Thyristorschaltung simuliert. Das Ventil wird durch einen Zündimpuls bei α = 0° gesteuert, so dass es wie eine Diode wirkt. Außerdem kann man die Dateien m1rc.ssh und m1rc_m.ssh zusätzlich mit Zündwinkeln α > 0° untersuchen. Dabei ist besonders zu beachten, dass dann die Durchschaltung nur bei positivem Spannungsabfall über dem Ventil und anlie gendem Zündimpuls erfolgt. 4.1 Kapazitive Glättung 63 Bild 4.5: Ströme in MATHCAD mit R = 10 kΩ und C = 1 µF Bild 4.6: Ströme in SIMPLORER mit R = 10 kΩ und C = 1 µF Beide Bilder sind mit gleichen Ordinatenmaßstäben versehen, so dass die Ergebnisgleichheit deutlich wird. Wenn eine Schaltung mathematisch formulierbar ist, kann MATHCAD verwendet werden. Allerdings müssen oft vereinfachende Annahmen getroffen werden, damit eine Berechnung möglich wird. Diese Einschränkung gilt für SIMPLORER nicht. Die Genauigkeit der Simulation wird durch die Schrittweiten und das Integrationsverfahren beeinflusst. 4 Glättung 64 4.2 Induktive Glättung Mit dem Ansatz des Maschensatzes folgt aus Bild 4.7 die Lösung der Differenzialgleichung, die sich aus dem Spannungsgleichgewicht des Schaltkreises ergibt. Der Gleichstrom id , Gleichung (4.4), wurde mit den Randbedingungen: id (0) = 0 beim Einschalten des Stromes und id (τd ) = 0 nach Beendigung der Stromführungsdauer τd bestimmt. u S = 2U S sin(x ) = id ( x) R + ωL did ( x) dx (4.3) Bild 4.7: Induktiv geglättete Einpulsschaltung Tabelle 4.1: Charakteristische Größen Effektivwert US I = R + (ω L) 2 2 R = cot(ϕ ) ωL Lastfaktor ρ= Phasenwinkel ωL ϕ = arctan R mit ω = 2ð ∗ 50 di ( x) Mit denu SAbkürzungen = 2U S sin(x )aus = id Tabelle ( x) R + ω4.1 L dfolgt der Gleichstrom als Lösung der Gleidx chung (4.3 ) im Intervall 0 ≤ x ≤ τ d . ( id = 2U S sin (x − ϕ) + sin(ϕ − α) e − p ( x −α ) ) (4.4) Die Stromführungsdauer τd wird aus Gleichung (4.4) der Stelle x = τd bestimmt, da der Strom i(τd ) = 0 ist. sin(x −ϕ ) − sin(α −ϕ )e − ρ ( x −α ) = 0 (4.5) 4.2 Induktive Glättung 65 Gleichung (4.5) ist als transzendente Gleichung nur mit Näherungsverfahren zu lösen. (z.B. mit dem Newtonschen Näherungsverfahren). Die Näherung lässt sich gut mit dem wurzel-Befehl aus MATHCAD rechnen. Bild 4.8 zeigt die beiden Extremfälle rein in duktiver Belastung (A) und rein ohmscher Belastung (B) im vollgesteuerten und Bild 4.9 im durch α gesteuerten Betrieb. Arbeitet eine Gleichrichterschaltung auf eine Induktivität ohne ohmschen Widerstand, so handelt es sich um einen gleichspannungsseitigen Kurzschluss. In diesem Falle wird nur reine Blindleistung umgesetzt. Dann ist die Leistungskurve p(x) eine reine Wechselgröße. Der arithmetische Mittelwert dieser Leistungsfunktion ist Null. Das Ventil führt während der gesamten Periode den Strom. Die Stromführungszeit τd beträgt 2π. Der Laststrom id wird durch das Ventil in der Ordinate um seine Amplituden verschoben. Der Maximalwert erreicht den doppelten Scheitelwert. Die in der Wechselspannungstheorie abge leitete Phasenverschiebung zwischen Spannung und Strom von 90° kann man hier wiederfinden, wenn der Strom id um eine Amplitudenhöhe in negativer Richtung verschoben wird. Technisch ist diese Schaltung nicht sinnvoll, da sie keine Wirkleistung abgibt. Der Spannungsmomentanwert entspricht in diesem Sonderfall der Steigung des Stroms. Bei den Nulldurchgängen der Spannung hat die Stromkurve eine waagerechte Tangente. Wird der Glättungsspeicher L aus der Schaltung genommen und ein ohmscher Lastwiderstand eingefügt, besitzt p(x) keine negativen Momentanwerte. Der arithmetische Mittelwert der Leistungskurve p(x) entspricht der Wirkleis tung P. Mittelwerte sind zeitunabhängige Größen und dürfen nicht mit ihren Momentanwerten verwechselt werden. An einem ohmschen Widerstand haben Strom- und Spannungsverlauf gleiche Kurvenform. Im Falle einer Ansteuerung durch den Zündwinkel α in Bild 4.9 kann der Strom nicht mit einer waagerechten Tangente beginnen, da die Spannung bei α mit einem Sprung einsetzt. Diese Abhängigkeiten sind durch das Induktionsgesetz im Falle A u = L(di/dt) vorgegeben. Die Stromkurven liegen symmetrisch zu den Spannungskurven. Man untersuche mit den Programmen, wie sich diese Symmetrien und Steigungen ändern, wenn man der Glättungs induktivität einen ohmschen Widerstand hinzufügt, also eine gemischte ohmsch-induktive Last anschließt. Im Fall B, einer rein ohmschen Last, haben Spannung und Strom wieder die gleiche Kurvenform. Bei geeigneter Maßstabswahl können beide Kurven übereinander liegen, da rauf ist beim SIMPLORER zu achten, falls anscheinend eine Anzeige fehlt. Zur Aufgabe einer Gleichrichterschaltung gehört es, möglichst glatte Gleic hgrößen, also zeit unabhängige Größen zu erzeugen. Die Einpulsschaltung hat deswegen als Gleichrichter keine praktische Bedeutung. 4 Glättung Strom Spannung 66 A id ud 0 Leistung x A p Pd = 0 0 Strom Spannung x B 2π ud und id 0 x Leistung 2π B 2π p Pd 0 x 2π Bild 4.8: Vollgesteuerte Gleichrichtung, A Betrieb ohne Widerstand, B Betrieb ohne Glättung mit Zündwinkel α = 0 Kapazitive Speicher glätten die Gleichspannung und induktive Speicher glätten den Gleichstrom. Die komplementäre Gleichgröße bleibt wellig. Auf der Eingangsseite der Gleichrichter sinkt bei kapazitiver Glättung der Grundschwingungsgehalt des Eingangsstromes sehr stark, so dass durch diese Verzerrungen stärkere Netzrückwirkungen entstehen als bei induktiver Glättung. In MATHCAD sind die Gleichungen (4.4) und (4.5) in der Datei m1rl.mcd verarbeitet. Durch Variation der Lastwiderstände R sowie ωL können beliebige Grafiken für Strom und Spannung für variable Steuerwinkel α erstellt werden. Man beachte, dass in dem Programm statt der Eingaben R = 0 oder L = 0 nur sehr kleine Werte eingesetzt werden, da sich sonst unzulässige Divisionen durch Null ergeben. 4.2 Induktive Glättung 67 Strom Spannung Zur Simulation mit SIMPLORER muss die Datei m1rl.ssh oder m1rl_m.ssh geladen werden. Dateien mit der Erweiterung m sind als Makros aufgebaut Alle Parameter sind bei den jeweiligen Bauele menten über das Eigenschaftenmenü einzugeben. Der Steuerwinkel wird über die Startzuweisung eingegeben. Die Einstellungen für die Grafik werden über das Eigenschaftenmenü der Schematic-Oberfläche eingegeben. Dieses Menü öffnet sich durch Klicken der rechten Maustaste auf einen beliebigen Punkt der Oberfläche. A id ud 0 Leistung α A x 2π Pd = 0 0 Strom Spannung 2π p α B uu und id 0 α Leistung x B x 2π p Pd 0 α x 2π Bild 4.9: Gesteuerte Gleichrichtung, A Betrieb ohne Widerstand, B Betrieb ohne Glättung mit Zündwinkel α ≠ 0