Gleichungen und Funktionen
Werbung

Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
Gleichungen und Funktionen
Grundbegriffe
Definition: Eine Funktion (bzw. Abbildung) f ist eine Relation zwischen zwei Mengen.
Diese ordnet jedem Element aus einer Urbildmenge D (Definitionsbereich) genau ein Element aus der Bildmenge W (Wertebereich) zu. Alle Elemente aus dem Definitionsbereich
werden als Argumente und alle Elemente aus dem Wertebereich werden als Funktionswerte
bezeichnet.
∀x ∈ D ∃! y ∈ W : f (x) = y
Menge und Intervall:
natürliche Zahlen:
N = {1, 2, 3, 4, 5, 6, 7, . . .}
ganze Zahlen:
Z = {. . . , −2, −1, 0, 1, 2, . . .}
rationale Zahlen:
Q = {q =
a
b
reelle Zahlen:
: a, b ∈ Z ∧ b 6= 0}
√
R = Q ∪ {. . . , − 2, e, π, . . .}
geschlossenes Intervall:
[a, b] = {x ∈ R : a ≤ x ≤ b}
offenes Intervall:
(a, b) = {x ∈ R : a < x < b}
linksoffenes Intervall:
(a, b] = {x ∈ R : a < x ≤ b}
rechtsoffenes Intervall:
[a, b) = {x ∈ R : a ≤ x < b}
Lineare Funktionen
Eine lineare Funktion ist eine Abbildung der Form
f (x) = mx + n .
D=W =R
Schnittpunkt mit x-Achse:
f (xS ) = 0
f (xS ) = mxS + n = 0 ⇒ xS = −
n
m
n
⇒ Sx = − , 0
m
Schnittpunkt mit y-Achse:
f (0) = yS
f (0) = m · 0 + n = yS ⇒ yS = n
⇒ Sy = (0, n)
1
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
Anwendungsbeispiele
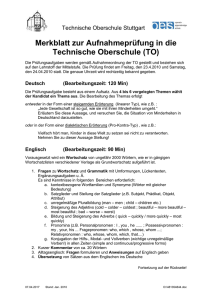
B1. Hooksches Gesetz
Das Hooksche Gesetz ist ein Sonderfall des Elastizitätsgesetzes. Es beschreibt ein
lineares Verhalten zwischen wirkender Kraft F und der daraus resultierenden Verformung. Dies gilt besonders für Federn bei kleinen Auslenkungen x aus der Ruhelage.
Die Proportionalitätskonstante k zwischen der Kraft F und der Auslenkung x wird
als Federkonstante bezeichnet.
F (x) = kx
F
x
R u h e la g e
x
(a)
(b)
Abbildung 1: (a) Lineare Abhängigkeit der Federspannkraft F von der Auslenkung x aus der
Ruhelage, (b) Federschwinger.
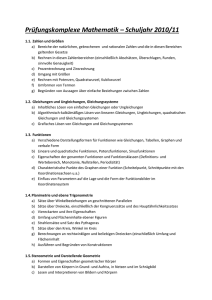
B2. Geschwindigkeit-Zeit-Gesetz
Für eine Bewegung mit konstanter Beschleunigung a gilt für die Geschwindigkeit
v(t) = at + v0 .
Die Beschleunigung beschreibt die Änderung der Geschwindigkeit mit der Zeit t und v0
die Geschwindigkeit zu dem Zeitpunkt t = 0, ab dem die Betrachtung der Bewegung
beginnt.
B3. Potentielle Energie
Die potentielle Energie Epot eines Körpers der Masse m ist nahe der Erdoberfläche
linear abhängig von dessen Höhenlage h.
Epot (h) = mgh
2
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
v
m
h
v
0
t
(a)
(b)
Abbildung 2: (a) Lineare Abhängigkeit der Geschwindigkeit v von der Zeit t für eine konstante Beschleunigung a, (b) Körper der Masse m auf der Höhe h bzgl. der
Erdoberfläche.
Quadratische Funktionen
Eine quadratische Funktion ist eine Abbildung der Form
f (x) = ax2 + bx + c .
D=R
)
4ac − b2
W = y∈R:y≥
für a > 0
4a
(
(
4ac − b2
W = y∈R:y≤
4a
Schnittpunkte mit x-Achse:
)
für a < 0
f (xS ) = 0
c
b
f (xS ) = ax2S + bxS + c = 0 ⇒ x2S + xS + = 0
a
a
b
c
p=
q=
a
a
2
2
2
p
p
p 2
p
2
2
⇒ xS + pxS + q = xS + pxS +
−
+ q = xS +
−
+q =0
2
2
2
2
2
2
s
p
p 2
− q ⇒ xS + = ±
−q
2
2
s
√
2
p
p
−b ± b2 − 4ac
⇒ xS = − ±
−q =
2
2
2a
p
⇒ xS +
2
p
=
2
3
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
p
⇒ Sx,1 = − +
2
s
2
p
2
p
− q, 0 Sx,2 = − −
2
s
2
p
2
− q, 0
2
p
−q >0
2
2
p
−q =0
eine Nullstelle:
2
2
p
keine Nullstelle:
−q <0
2
zwei Nullstellen:
Schnittpunkt mit y-Achse:
f (0) = yS
f (0) = a · 02 + b · 0 + c = yS ⇒ yS = c
⇒ Sy = (0, c)
Anwendungsbeispiele
B4. Weg-Zeit-Gesetz
Für eine gleichmäßig beschleunigte Bewegung (a = const.) ist der Weg s quadratisch
abhängig von der Zeit t.
a
s(t) = t2 + v0 t + s0
2
Dabei beschreibt s0 den Weg, welcher vor dem Betrachtungszeitpunkt (t = 0) zurückgelegt wurde.
s
s
0
t
Abbildung 3: Quadratische Abhängigkeit des Weges s von der Zeit t für eine gleichmäßig
beschleunigte Bewegung.
B5. Kinetische Energie
Die kinetische Energie eines Körpers der Masse m ist quadratisch abhängig von dessen
Geschwindigkeit v.
m
Ekin (v) = v 2
2
4
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
Trigonometrische Funktionen
Sinusfunktion
f (x) = a sin(bx + c)
D=R
W = {y ∈ R : −|a| ≤ y ≤ |a|}
Schnittpunkte mit x-Achse:
f (xS ) = 0
f (xS ) = a sin(bxS + c) = 0
⇒ bxS + c = nπ
nπ − c
mit n ∈ Z
b
nπ − c
,0
⇒ Sx,n =
b
⇒ xS,n =
Schnittpunkt mit y-Achse:
f (0) = yS
f (0) = a sin(b · 0 + c) = yS ⇒ yS = a sin(c)
⇒ Sy = (0, a sin c)
Kosinusfunktion
f (x) = a cos(bx + c)
D=R
W = {y ∈ R : −|a| ≤ y ≤ |a|}
Schnittpunkte mit x-Achse:
f (xS ) = 0
f (xS ) = a cos(bxS + c) = 0
⇒ bxS + c =
(2n + 1)
π
2
(2n + 1)π − 2c
mit n ∈ Z
2b
!
(2n + 1)π − 2c
⇒ Sx,n =
,0
2b
⇒ xS,n =
5
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
Schnittpunkt mit y-Achse:
f (0) = yS
f (0) = a cos(b · 0 + c) = yS ⇒ yS = a cos(c)
⇒ Sy = (0, a cos c)
c o s (x )
y
π/2
π
s in ( x )
3π/2
2π
x
Abbildung 4: Graphen der Funktionen sin x und cos x.
Tangensfunktion
f (x) = a tan(bx + c)
)
(
(2n + 1)π − 2c
mit n ∈ Z
D = x ∈ R : x 6=
2b
W =R
Schnittpunkte mit x-Achse:
f (xS ) = 0
f (xS ) = a tan(bxS + c) = 0
⇒ bxS + c = nπ
nπ − c
mit n ∈ Z
b
nπ − c
⇒ Sx,n =
,0
b
⇒ xS,n =
Schnittpunkt mit y-Achse:
f (0) = yS
f (0) = a tan(b · 0 + c) = yS ⇒ yS = a tan(c)
⇒ Sy = (0, a tan c)
6
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
Anwendungsbeispiele
B6. Schwingung
Ein Körper soll in der Ebene eine Kreisbewegung mit dem Radius R vollführen. Die
Änderung des Winkels φ erfolgt linear über die Zeit t mit der Winkelgeschwindigkeit ω.
φ(t) = ωt + φ0
Die y- und die x-Koordinate des Körpers und der Radius R des Kreises bilden ein
rechtwinkliges Dreieck (siehe Abbildung 5). Daraus ergibt sich für die y-Koordinate
der Bewegung die Beziehung
sin(φ(t)) =
y(t)
.
R
⇒ y(t) = R sin(φ(t)) = R sin(ωt + φ0 )
Das zeitabhängige Verhalten der y-Koordinate ist gleich dem einer Schwingung mit
der Auslenkung y(t) und der Amplitude y0 = R.
y(t) = y0 sin(ωt + φ0 )
Dabei wird φ(t) als Phase und φ0 als Phasenkonstante oder auch Phasenverschiebung
bezeichnet. Diese gibt die anfängliche Auslenkung (t = 0) der Schwingung an.
y(t = 0) = y0 sin(φ0 )
ω
y
y
R
R s i n ( ωt )
R
φ
x
t
Abbildung 5: Zeitliche Abhängigkeit der y-Koordinate einer Kreisbewegung mit einer konstanten Winkelgeschwindigkeit ω.
7
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
Exponentialfunktion
f (x) = aebx
D=R
W = {y ∈ R : y > 0} für a > 0
W = {y ∈ R : y < 0} für a < 0
Schnittpunkt mit x-Achse:
f (xS ) = 0
f (xS ) = aebxS = 0
⇒ ebxS = 0
⇒ xS = e.n.
Schnittpunkt mit y-Achse:
f (0) = yS
f (0) = aeb · 0 = yS ⇒ yS = a
⇒ Sy = (0, a)
Anwendungsbeispiele
B7. Kondensator
Der Aufladungs- und der Entladungsprozess der Spannung UC (t) eines Kondensators,
welcher an einer Gleichspannungsquelle U0 angeschlossen ist, erfolgt exponentiell über
die Zeit t (siehe Abbildung 6 (a)). Für eine Reihenschaltung aus dem Widerstand R
und der Kapazität C ist die Zeitkonstante τ das Produkt aus R und C.
Aufladung: UC (t) = U0 (1 − e−t/τ )
Entladung: UC (t) = U0 e−t/τ
B8. Normalverteilung
Zufällige Abweichungen der Messwerte z vom Mittel- oder Erwartungswert z̄ einer
Größe werden in sehr guter Näherung durch die Normalverteilung beschrieben (siehe
Abbildung 6 (b)). Diese können zum Beispiel bei der Fertigung von Werkstücken
zufällige Abweichungen vom Nennmaß sein.
(
(z̄ − z)2
1
p(z) = √ exp −
2
2π
)
Dabei beschreibt p(z) die Wahrscheinlichkeit des Messwertes z.
8
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
p
U
U
0
A u fla d u n g
E n tla d u n g
0
t
(a)
z - z
(b)
Abbildung 6: (a) Zeitlicher Spannungsverlauf für den Aufladungs- und Entladungsprozess eines Kondensators, (b) Normalverteilung der Messwerte z um dem Mittelwert z̄.
B9. Radioaktiver Zerfall
Der zeitliche Verlauf der Teilchenanzahl n(t) von radioaktiven Stoffen erfolgt exponentiell.
n(t) = n0 e−αt
Die Konstante α wird als Zerfallskonstante bezeichnet und n0 ist die Anzahl der
Teilchen zum Betrachtungszeitpunkt t = 0.
n
n
0
n (t)
n 0/2
t
t = 0
tH
Abbildung 7: Zeitlicher exponentieller Verlauf der Teilchenzahl n(t) eines radioaktiven Stoffes.
9
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
Logarithmusfunktion
f (x) = a logr (bx + c)
c
D= x∈R:x>−
b
W =R
Schnittpunkt mit x-Achse:
f (xS ) = 0
f (xS ) = a logr (bxS + c) = 0
⇒ bxS + c = 1
1−c
⇒ xS =
b
1−c
⇒ Sx =
,0
b
Schnittpunkt mit y-Achse:
f (0) = yS
f (0) = a logr (b · 0 + c) = yS ⇒ yS = a logr (c)
⇒ Sy = (0, a logr c) mit c > 0
Anwendungsbeispiele
B10. Logarithmische Skala
(a )
(b )
(c )
0
1
2
3
0 ,0
0 ,1
0 ,2
1
4
0 ,3
2
5
0 ,4
6
3
0 ,5
7
8
0 ,6
0 ,7
4
5
6
0 ,8
7
9
1 0
0 ,9
1 ,0
8
9 1 0
Abbildung 8: (a) lineare Skala, (b) Logarithmus zur Basis 10 der linearen Skala, (c) logarithmische Skala.
10
Hochschule für Technik, Wirtschaft und Kultur Leipzig
Vorkurs „Mathematische Grundlagen der Physik“
Gleichungen und Funktionen
Der Vorteil der logarithmischen Darstellung besteht darin, dass Abhängigkeiten über
mehrere Größenordnungen genauer betrachtet werden können. Zum Beispiel ist es
üblich das frequenzabhängige Spannungsverhältnis eines Tiefpasses von Ausgangsspannung Ua zu Eingangsspannung Ue (siehe Abbildung 9) auf logarithmischer Skala
aufzutragen.
1 0
e
U
-1
1 0
-2
1 0
-3
1 0
-4
a
C
a
U
U
1 0
/U
e
R
0
1 0
-5
1 0
-2
1 0
-1
1 0
0
1 0
1
1 0
2
1 0
3
1 0
4
1 0
5
1 0
6
f [H z ]
(a)
(b)
Abbildung 9: (a) Tiefpass, (b) Spannungsübertragung Ua /Ue eines Tiefpasses in Abhängigkeit von der Frequenz f in doppelt logarithmischer Darstellung.
B11. Schalldruckpegel
Der Schalldruckpegel Sp ist eine logarithmierte Größe zur Beschreibung eines Schallereignisses. Die Einheit ist das Dezibel (dB).
Sp = 20 log10
p̄
p0
!
Dabei bezeichnet p̄ den Effektivwert des Schalldrucks und p0 ist ein Referenzwert,
der für Luft 20 µPa beträgt. Es ist zu beachten, dass es sich um eine logarithmierte
Größe handelt. Zum Beispiel entspricht eine Änderung von 30 dB auf 50 dB eine Änderung des mittleren Schalldrucks p̄ von ca. 5,7 mPa, aber eine Änderung von 80 dB
auf 100 dB entspricht einer Änderung des mittleren Schalldrucks von ca. 1,8 Pa.
Es ist nur ein sehr eingeschränkter Rückschluss von wahrgenommener Empfindung
und vorhandenen Schalldruckpegel möglich, da dieser eine technische und keine psychoakustische Größe ist. Tendenziell verursacht eine Erhöhung bzw. Senkung des
Schalldruckpegels ein als lauter bzw. leiser wahrgenommenes Geräusch.
11