5 Ein Axiomensystem der euklidischen Geometrie - KIT
Werbung

5 Ein Axiomensystem der euklidischen Geometrie
5.1 Vorbemerkungen
Im vorigen Kapitel haben wir gesehen, wie sich aus aus den Axiomen einer affinen Ebene
Zahlbereiche entwickeln lassen, die im Pappusschen Fall Körper sind. Durch Hinzunahme von Anordnungsaxiomen hätten wir am Ende sogar den Körper der reellen Zahlen
erhalten.
In diesem Kapitel ändern wir unser Vorgehen. Wir wollen die klassische euklidische
Ebene unter expliziter Verwendung der reellen Zahlen axiomatisch beschreiben. 1932
hat G. D. Birkhoff ein Axiomensystem angegeben, das die Verwendung von Messlineal
und Winkelmesser in der Zeichenebene formalisiert. Diese Ideen waren dann Grundlage des 1941 erschienenen Buches Basic Geometry von G. D. Birkhoff und R. Beatly .
Wir verwenden im Folgenden ein Axiomensystem, das 1977 vom russischen Mathematiker Kolmogorov angegeben wurde. Es ist zum Hilbert’schen Axiomensystem äquivalent,
vereinfacht aber manche Beweise.
5.2 Das Axiomensystem
Während üblicherweise eine große Abstraktheit bei der Einarbeitung in ein neues mathematisches Gebiet Schwierigkeiten bereitet,ist es hier umgekehrt.Gerade die (vermeintliche) Konkretheit und Vertrautheit ist bei unserem Thema gefährlich. Jeder kennt die
70
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
70
euklidische Ebene. Daher besteht immer die Gefahr, dass wir bei der Argumentation nicht
nur die Axiome verwenden, sondern unbewusst anschauliche Argumente einfließen lassen.
Auch bekannte Mathematiker sind bei ihren „Beweisen“ des Parallelenaxioms dieser Gefahr erlegen (wir werden darauf später zurückkommen).
Daher ist es hilfreich, bei den Überlegungen in diesem Kapitel neben dem uns vertrauten
Modell der euklidischen Ebene E2 auch das folgende zu betrachten. Dazu sei der E2 eine
Ebene π des E3 . σN bzw. σS sei die stereographische Projektion aus dem Nordpol N bzw.
aus dem Südpol S einer Sphäre Σ um einen Punkt M ∈ π in deren Äquatorebene π (siehe
−1
Abb. 3.14). Dann besteht σS (σN
(π)) aus allen Punkten von π ohne M , vermehrt um
−1
einen Punkt ∞ (für das fehlende Bild des Punktes S unter σS ). σN
bildet die Geraden
von π auf die Kreise von Σ durch N (ohne N ) ab. σS bildet einen solchen Kreis k auf
einen Kreis durch M (ohne M ) ab, falls S ∈
/ k gilt. Für S ∈ k ist σS (k) eine Gerade durch
M (ohne M ), vermehrt um den Punkt ∞. Nimmt man alle Begriffe des E2 (Geraden,
Lot, Abstand, Kongruenz,. . . ) bei diesen Abbildungen mit, erhält man ein Modell der
euklidischen Ebene mit der Punktmenge (E2 \ {M }) ∪ {∞}.
Aufgabe: Man zeige, dass die Inversion ι am Äquatorkreis dasselbe Ergebnis liefert (siehe
3.2 Bem. 4).
Def. 1
Eine Inzidenzstruktur (P , G, ∈) zusammen mit einer Abbildung
P ×P →
R
d:
.
(A, B) 7→ d(A, B)
heißt absolute Ebene, wenn sie den folgenden Axiomgruppen I bis IV genügt; sie heißt
euklidische Ebene, wenn sie den Axiomgruppen I bis V genügt.
d(A, B) heißt der Abstand der Punkte A und B.
Hilbert verwendet in seinem Axiomensystem ebenfalls die Grundbegriffe Punkt, Gerade
und Inzidenz, daneben die Grundbegriffe „zwischen“ (damit wird eine Ordnung auf den
Geraden eingeführt) und „Kongruenz“. Das Axiomensystem von Kolmogorov verwendet
statt dessen den Begriff „Abstand“.
Es ist durchaus sinnvoll, die Menge R als Bildmenge der Abbildung d zu wählen. Einerseits
reichen die √
rationalen Zahlen sicher nicht aus, da schon die Diagonale des Einheitsquadrats
die Länge 2 hat. Andererseits sind die komplexen Zahlen unbrauchbar, da ihnen die
Anordnung fehlt.
Um deutlich zu machen, welche Aussagen welche Axiome voraussetzen, werden wir nach
jeder Gruppe die Sätze beweisen und Definitionen aussprechen, die ohne die späteren
Axiome auskommen. Wichtig ist insbesondere, welche Aussagen nicht von der Gültigkeit
des Parallelenaxioms V abhängen, also Sätze der absoluten Geometrie sind.
A
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
71
I Inzidenzaxiome
(1) Zu zwei verschiedenen Punkten P, Q gibt es genau eine Gerade g, die beide
Punkte enthält (Bezeichnung: g = P Q).
(2) Jede Gerade enthält mindestens zwei Punkte.
(3) Es gibt drei Punkte, die nicht derselben Geraden angehören.
Satz 1 (i) Zwei verschiedene Geraden haben höchstens einen Punkt gemeinsam.
(ii) Es gibt mindestens drei paarweise verschiedene Geraden.
Beweis: (i) folgt aus I(1).
(ii) Nach I(3) gibt es nichtkollineare Punkte A, B, C, die nach I(1) paarweise verschieden
sind. Die drei Geraden AB, AC, BC sind dann ebenfalls paarweise verschieden.
2
Wir werden die gewohnten Sprechweisen verwenden. So werden wir für P ∈ g auch „P
liegt auf g“ oder „P inzidiert mit g“ oder „P ist ein Punkt von g“ sagen. Explizit festhalten
wollen wir die Begriffe der folgenden
Def. 2
(i) Zwei Geraden, die sich nicht schneiden, heißen parallel.
(ii) Punkte A, B, C, . . . einer Geraden heißen kollinear.
Wir betrachten einige Beispiele.
Beispiel 1 P = {A, B, C} und G = {{A, B}, {A, C}, {B, C}} erfüllen die Axiome I
(Minimalmodell).
Beispiel 2 Sei P = {A, B, C, D}.
(i) P und G = {{A, B}, {A, C}, {A, D}, {B, C}, {B, D}, {C, D}} erfüllen die Axiome I.
(ii) P und G = {{A, B, C}, {A, B, D}, {A, C, D}, {B, C, D}} erfüllen die Axiome I nicht.
Beispiel 3
P = { (x, y) | x, y ∈ R } und
G = { { (x, y) | ax + by + c = 0 } | a, b, c ∈ R; a2 + b2 6= 0 }
erfüllen die Axiome I.
72
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
II Abstandsaxiome
(1) Für alle Punkte A, B gilt d(A, B) ≥ 0 und d(A, B) = 0 genau für A = B.
(2) Für alle Punkte A, B gilt d(A, B) = d(B, A).
(3) Für alle Punkte A, B, C gilt
d(A, B) + d(B, C) ≥ d(A, C) .
Die Punkte sind genau dann kollinear, wenn eine der folgenden Gleichungen
erfüllt ist.
d(A, B) + d(B, C) = d(A, C) ,
d(A, C) + d(C, B) = d(A, B) ,
d(B, A) + d(A, C) = d(B, C) .
(22)
(23)
(24)
In den Beispielen 1 und 2 (i) lässt sich ein Abstand einfach durch d(A, B) = 1 für A 6= B
definieren. (d(A, A) = 0 ist ja durch II(1) vorgeschrieben.) In Beispiel 3 kann man einen
Abstand durch
p
d(A, B) = d((a1 , a2 ), (b1 , b2 )) = (a1 − b1 )2 + (a2 − b2 )2
einführen.
Die Abstandsaxiome machen die absolute Ebene zum metrischen Raum. Dies ist zwar
eine starke Forderung, doch zeigen die oben erwähnten Metriken, dass dieser Begriff andererseits recht allgemein ist. Wir werden mit Hilfe der Metrik Bewegungen definieren.
Man könnte auch umgekehrt vorgehen und sich eine Menge von Abbildungen vorgeben,
die die Metrik festlegen. In Teil III werden wir so vorgehen.
Def. 3 (i) Ein Punkt B liegt zwischen den Punkten A und C (in Zeichen:
Zw(A, B, C)), wenn (22) sowie B 6= A und B 6= C gilt.
(ii) Für A, B ∈ P (A 6= B) heißt
(AB) := { P ∈ P | Zw(A, P, B) }
die offene Strecke und
AB := (AB) ∪ { A, B }
die (abgeschlossene) Strecke zwischen A und B oder die Verbindungsstrecke dieser
Punkte. A, B heißen die Endpunkte der Strecke, d(A, B) heißt ihre Länge.
(iii) Sind A, B verschiedene Punkte, so heißen die Mengen
AB + := { P ∈ P | Zw(A, P, B) oder Zw(A, B, P ) oder P = B oder P = A }
(25)
und
AB − := { P ∈ P | Zw(P, A, B) oder P = A }
(26)
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
73
(abgeschlossene) Halbgeraden oder Strahlen mit dem Anfangspunkt A. Entfernt man
den Anfangspunkt, erhält man offene Halbgeraden.
Bem. 1 (i) Wegen II(2) gilt Zw(A, B, C) genau dann, wenn Zw(C, B, A) gilt.
(ii) Gilt Zw(A, B, C), so sind die Punkte wegen II(3) kollinear. Außerdem sind sie paarweise verschieden (Nach Def. wäre höchstens A = C möglich. Dann liefert aber (22)
A = B = C.)
(iii) Ebenfalls nach II(3) liegt von drei (verschiedenen) kollinearen Punkten A, B, C genau
einer zwischen den beiden anderen. Gilt sowohl (22) als auch (23), folgt nämlich d(B, C) =
0, also nach II(1) B = C. Wir notieren nochmals die Zusammenhänge.
A, B, C kollinear ⇐⇒
Zw(A, B, C) oder Zw(A, C, B) oder Zw(B, A, C)
m
m
m
⇐⇒
Zw(C, B, A) oder Zw(B, C, A) oder Zw(C, A, B)
m
m
m
⇐⇒
(22)
oder
(23)
oder
(24)
(iv) Wie Beispiel 1 zeigt, muss es keine Punkte geben, welche die Zwischenbeziehung
erfüllen. Offene Halbgeraden können also leer sein.
Satz 2
Es gilt AB + ∩ AB − = {A} und AB + ∪ AB − = AB.
Beweis: A ∈ AB + ∩ AB − ist klar. Für P ∈ AB − \ {A} gilt nach Def. 3 (iii) Zw(P, A, B)
und daher nach Bem. 1 (iii) P ∈
/ AB + . AB + ∪ AB − ⊂ AB ist klar. Gilt umgekehrt
Q ∈ AB, so gilt Q ∈ {A, B} oder nach Bem. 1 (iii) eine der Zwischenbeziehungen in (25)
oder (26).
2
III Anordnungsaxiome
(1) Zu jedem Punkt P und jeder reellen Zahl a ≥ 0 gibt es auf jeder Halbgeraden
mit dem Anfangspunkt P genau einen Punkt R mit d(P, R) = a.
(2) Jede Gerade g teilt die Menge P \ g so in zwei nichtleere Mengen (genannt
die offenen Halbebenen mit der Randgeraden g), dass
(a) die Verbindungsstrecke zweier Punkte, die nicht in derselben Menge
liegen, die Gerade g schneidet,
(b) die Verbindungsstrecke zweier Punkte, die in derselben Menge liegen,
die Gerade g nicht schneidet.
Nimmt man die Randgerade hinzu, so erhält man (abgeschlossene) Halbebenen. Wir
bezeichnen eine Halbebene H mit der Randgeraden g = AB mit gC + oder ABC + , wenn
H den Punkt C ∈
/ g enthält, und mit gC − oder ABC − , wenn H den Punkt C nicht
enthält.
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
74
Bem. 2 Aus III(1) folgt, dass jede Halbgerade, Gerade und Strecke unendlich viele
Punkte besitzt. Es gibt daher keine endlichen Modelle für die Axiomgruppen I - III.
Axiom III(2) erlaubt eine wichtige Aussage über Dreieckstransversalen, die in anderen
Axiomensystemen auch als Axiom von Pasch bezeichnet wird. Wir formulieren zunächst die
Def. 4 Sind A, B, C nicht kollinear, so heißt die Menge AB ∪ BC ∪ CA das Dreieck
∆ABC mit den Seiten AB, BC, CA.
Man beachte den Unterschied zu Kapitel 4, wo auch das „Innere“ zum Dreieck gehörte
(siehe Kor. 1).
Satz 3 (Satz von Pasch) Liegt auf der Geraden g keine Ecke des Dreiecks ∆ABC, so
gilt: Schneidet g die Seite AB, so schneidet g auch genau eine der Seiten BC, CA.
Beweis: Wegen g∩(AB) 6= ∅ liegen A und B nach III(2) in verschiedenen Halbebenen mit
der Randgeraden g. Daher liegen entweder A, C oder B, C in verschiedenen Halbebenen
mit dieser Randgeraden.
2
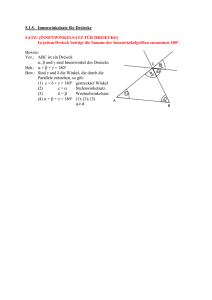
Korollar 1
Keine drei der Punkte A, B, C, R seien kollinear. Gilt
R ∈ ABC + ∩ ACB + ∩ BCA+ \ (AB ∪ BC ∪ CA)
(R im Innern von ∆ABC; siehe Abb. 5.3), so trifft AR+ die offene Strecke (BC).
cC
Rc
c
Â
c
A
c
B
Abbildung 5.3: Zu Korollar 1
Beweis: Wir wählen einen Punkt  ∈ AB mit Zw(Â, A, B), also mit  ∈ ACB − , und
wenden den Satz von Pasch auf ∆ÂBC an. Danach schneidet AR eine der offenen Strecken
(ÂC) oder (BC). Wegen ÂC + , BC + ⊂ ABC + und AR ∩ ABC + = AR+ schneidet auch
AR+ eine dieser Strecken. Aus AR+ ⊂ ACB + und (ÂC) ⊂ ACB − \ AC folgt schließlich
die Behauptung.
2
Bem. 3 (i) Die Forderung R ∈ BCA+ wurde im Beweis nicht verwendet. Die Aussage
gilt daher für alle Punkte R ∈ ABC + ∩ ACB + .
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
75
(ii) ABC − ∩ ACB − ∩ BCA− = ∅ (Für X ∈ ABC − ∩ ACB − gilt nämlich AX ⊂ ABC − ∩
ACB − . Wegen BC ∩ ABC − = BC − und BC ∩ ACB − = CB − gilt ferner BC ∩ ABC − ∩
ACB − = ∅, woraus AX ∩ BC = ∅, also X ∈ BCA+ folgt.)
Def. 5 Die Vereinigung von Halbgeraden SP + und SQ+ heißt Winkel <) P SQ (oder
<) QSP , <) (SP + , SQ+ ), <) (SQ+ , SP + )) mit den Schenkeln SP + , SQ+ und dem Scheitel S. Für SP + ∪ SQ+ = SP heißt der Winkel gestreckt. Für SP + = SQ+ heißt er
Nullwinkel. Ist der Winkel <) P SQ nicht gestreckt und kein Nullwinkel, so heißt der
Durchschnitt der Halbebenen P SQ+ und QSP + das Innere In <) P SQ dieses Winkels
(siehe Abb. 5.4).
Pc
Sc
c
Q
Abbildung 5.4: In <) P SQ
Def. 6 Eine surjektive Abbildung b : P → P , die alle Abstände unverändert lässt, heißt
Bewegung.
Da jede Bewegung wegen II(1) eine injektive Abbildung ist, besitzt sie eine Umkehrabbildung, die nach Definition wieder eine Bewegung ist. Hieraus folgt der
Satz 4
Die Bewegungen bilden bzgl. der Hintereinanderausführung eine Gruppe.
Wir stellen nun einige geometrische Eigenschaften der Bewegungen zusammen.
Satz 5 Eine Bewegung b besitzt folgende Eigenschaften.
(i) b erhält die Zwischenbeziehung.
(ii) b bildet die Gerade P Q auf die Gerade b(P )b(Q) ab.
(iii) b bildet die Strecke P Q auf die Strecke b(P )b(Q) ab.
(iv) b bildet die Halbgerade P Q± auf die Halbgerade b(P )b(Q)± ab.
(v) b bildet die Halbebene P QR± auf die Halbebene b(P )b(Q)b(R)± ab.
(vi) b bildet den Winkel <) P SQ (sowie sein Inneres) auf den Winkel <) b(P )b(S)b(Q) (und
dessen Inneres) ab.
Beweis: (i) ist klar, da Bewegungen die Eigenschaft (22) auf die Bildpunkte übertragen.
(ii) b(P Q) ⊂ b(P )b(Q) folgt aus (i); „⊃“ gilt, da mit b auch b−1 eine Bewegung ist.
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
76
(iii), (iv) analog.
(v) Die Gerade P Q wird nach (ii) auf die Gerade b(P )b(Q) abgebildet. Für X ∈ P QR +
schneidet XR die Gerade P Q nicht. Wegen der Injektivität von b sowie den Eigenschaften
(ii) und (iii) schneidet daher b(X)b(R) die Gerade b(P )b(Q) ebenfalls nicht. Also gilt
b(P QR+ ) ⊂ b(P )b(Q)b(R)+ . „⊃“ folgt wie oben.
(vi) folgt aus (iv) und (v).
2
Die Aussagen (ii) und (iv) zeigen zusammen mit III(1) das folgende
Korollar 2
Eine Gerade mit zwei Fixpunkten ist eine Fixpunktgerade.
Wir kennen jetzt zwar zahlreiche Eigenschaften von Bewegungen, wissen aber nicht, ob
solche Abbildungen - abgesehen von der identischen Abbildung - überhaupt existieren.
Die Existenz sichert erst das Axiom IV.
IV Bewegungsaxiom
Für d(A, B) = d(P, Q) > 0 gibt es genau zwei Bewegungen b1 , b2 , die A auf
P und B auf Q abbilden. Ist H eine Halbebene mit der Randgeraden AB,
so gilt dabei b1 (H) 6= b2 (H).
Mit Hilfe des Begriffs der „Fahne“ wird in Satz 6 eine Aussage bewiesen, die in vielen Axiomensystemen als Axiom formuliert wird (so genannte freie Beweglichkeit nach Helmholtz
(1866)).
Def. 7 Sind P ein Punkt, h = P Q+ eine Halbgerade und H eine Halbebene mit der
Randgeraden P Q, so heißt das Tripel F = (P, h, H) eine Fahne (siehe Abb. 5.5)
H
s
P
h
Abbildung 5.5: Fahne F = (P, h, H)
Satz 6 Sind F = (P, h, H) und F 0 = (P 0 , h0 , H 0 ) Fahnen, so gibt es genau eine Bewegung
b, die F auf F 0 abbildet (für die also b(P ) = P 0 , b(h) = h0 und b(H) = H 0 gilt).
Beweis: Nach IV gibt es genau zwei Bewegungen bi (i = 1, 2) mit bi (P ) = P 0 und
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
77
bi (h) = h0 . Wegen b1 (H) 6= b2 (H) gilt ferner entweder b1 (H) = H 0 oder b2 (H) = H 0 .
2
Mit Satz 5 (v) und Kor. 2 folgt hieraus sofort das
Hat eine Bewegung b drei nicht kollineare Fixpunkte, so ist b die identische
Korollar 3
Abbildung.
Bem. 4 Satz 6 erlaubt die Definition verschiedener Typen von Bewegungen, aus denen
man durch Verkettung alle Bewegungen der euklidischen Ebene erhält (vgl. Abschnitt
1.3).
(i) Wählt man P = P 0 , h = h0 und H 6= H 0 , so erhält man eine Geradenspiegelung
(siehe Kor. 2) b. Wegen b(b(H)) = H gilt b ◦ b = id. Die Geradenspiegelung ist also eine
Involution.
(ii) Wählt man P = P 0 , h = P Q+ , h0 = P Q− sowie H 6= H 0 , so liegt eine Punktspiegelung vor. Auch diese Abbildung ist eine Involution.
(iii) Seien P, Q, R nicht kollinear. Wählt man P = P 0 , h = P Q+ , h0 = P R+ sowie
H = P QR+ , H 0 = P RQ− , so erhält man eine Drehung (siehe Abb. 5.6). (Zwar wurden
c
R
c
c
P
Q
Q
c
c
P
c
R
Abbildung 5.6: Drehung
– anschaulich gesprochen – durch die Festlegung des Inneren nur Winkel zwischen 0◦ und
180◦ definiert. Da allerdings zwei Drehrichtungen möglich sind, erhält man – wenn man
die Punktspiegelung hinzunimmt – alle Drehungen zwischen 0◦ und 360◦ .)
(iv) Wählt man P 6= P 0 , h0 ⊂ h ⊂ P P 0 und H = H 0 , so erhält man eine Translation (siehe Abb. 5.7). Man kann also eine Translation ohne Verwendung des Parallelenaxioms de-
H = H0
s
P
s
h
P0
Abbildung 5.7: Translation
h0
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
78
finieren. Ihre typischen Eigenschaften, die die Bezeichnung Parallelverschiebung rechtfertigen, lassen sich allerdings nur mit dem Parallelenaxiom V zeigen.
V (euklidisches) Parallelenaxiom
Zu jeder Geraden g und jedem nicht auf g liegenden Punkt P gibt es höchstens eine Gerade, die P enthält und zu g parallel ist.
Bevor wir uns diesem Axiom zuwenden, beweisen wir weitere Sätze der absoluten Ebene.
5.3
Die absolute Ebene
Nach 5.2 Def. 1 werden in der absoluten Ebene nur die Axiomgruppen I bis IV vorausgesetzt. Wir werden nun einige Sätze dieser Geometrie beweisen und weitere Begriffe
einführen. Wichtig ist, dass diese nicht vom Parallelenaxiom V abhängen. Wir beginnen
mit Kongruenzbetrachtungen.
Def. 1 Zwei Punktmengen M1 , M2 heißen kongruent (M1 ∼
= M2 ), wenn es eine Bewegung b gibt mit b(M1 ) = M2 .
Bem. 1 Die symmetrische Sprechweise ist erlaubt, da mit b auch b−1 eine Bewegung
ist. ∼
= ist eine Äquivalenzrelation in der Potenzmenge von P .
Bem. 2
Wir betrachten ein Dreieck ∆ABC. Gilt für eine Bewegung b
b(A) = A0 , b(B) = B 0 , b(C) = C 0 ,
so werden nach 5.2 Satz 5 (iii) die Seiten von ∆ABC auf die Seiten von ∆A0 B 0 C 0 abgebildet. Die beiden Dreiecke sind daher kongruent. Ferner werden nach 5.2 Satz 5 (vi) die
Winkel der beiden Dreiecke aufeinander abgebildet. Auch sie sind also kongruent.
Wir beweisen im Folgenden einige aus der Schule bekannte Kongruenzsätze und zeigen
damit, dass sie zur absoluten Geometrie gehören. Wir beginnen mit einem vorbereitendem
Lemma.
Lemma Für jeden Winkel <) (p, q) gelten die folgenden Aussagen.
(i) Es gibt eine Bewegung b mit b(p) = q und b(q) = p.
(ii) Zu jeder Halbgeraden p0 und jeder Halbebene H 0 , deren Randgerade p0 enthält, gibt es
genau eine Halbgerade q 0 ⊂ H 0 mit
<) (p0 , q 0 ) ∼
= <) (p, q) .
(27)
79
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
Qc
········
·
···
·····················
·
·
·
···························
·
·
R
Sc
1 c·························c
···································
································
······························
U
···························
·························
·······················
····················
··················
···············
·············
···········
········
······
(a)
···· c
P
Qc
cR2
Sc
cP
(b)
R
c
Abbildung 5.8: Kongruente Winkel
Beweis: (i) Es seien p = SP + und q = SQ+ mit d(S, P ) = d(S, Q). Dann gibt es nach
5.2 Satz 6 genau eine Bewegung b mit
b(S) = S , b(P ) = Q , b(SP Q+ ) = SQP + .
Wir nehmen R = b(Q) 6= P an. Dann gilt auch R ∈
/ P Q und SR+ ⊂ SQP + \ (SQ ∪ SP ).
Fall 1: SR+ ⊂ SP Q+ (siehe Abb. 5.8 (a)).
Nach 5.2 Kor. 1 und Bem. 3 (i) schneidet SR+ die offene Strecke (P Q) in einem Punkt
U (6= R). Im Dreieck ∆RU Q gilt
d(R, U ) + d(U, Q) > d(R, Q) = d(P, Q) = d(P, U ) + d(U, Q) ,
woraus
d(R, U ) > d(P, U )
(28)
folgt. Wir betrachten nun das Dreieck ∆SP U . Für Zw(S, R, U ) (man betrachte in Abb.
5.8 (a) die Lage R1 ) gilt
d(S, P ) + d(P, U ) > d(S, U ) = d(S, R) + d(R, U ) = d(S, P ) + d(R, U ) ,
also
d(P, U ) > d(R, U )
im Widerspruch zu (28). Für Zw(S, U, R) (man betrachte R2 ) folgt derselbe Widerspruch
aus
d(S, U ) + d(U, P ) > d(S, P ) = d(S, R) = d(S, U ) + d(U, R) .
Fall 2: SR+ ⊂ SP Q− (siehe Abb. 5.8 (b)).
In diesem Fall gilt SR+ ∩ (P Q) = ∅. Da aus R ∈ SQP + auch SR− ∩ (P Q) = ∅ folgt, gilt
SR ∩ (P Q) = ∅ und damit SP + ⊂ SRQ+ . Betrachten wir also <) (SR+ , SQ+ ) an Stelle
von <) (SP + , SQ+ ) und die Bewegung b−1 an Stelle von b, so liegt wieder Fall 1 vor.
(ii) Nach (i) gilt (27) genau dann, wenn es eine Bewegung gibt, die p auf p0 und q auf q 0
abbildet. Durch die erste Bedingung und die Festlegung der Halbebene H 0 , die q 0 enthalten
soll, ist eine solche Bewegung nach 5.2 Satz 6 eindeutig bestimmt.
2
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
80
Nach dem Lemma (und 5.2 Satz 6) gibt es genau zwei Bewegungen b1 , b2 , die zwei kongruente Winkel <) (p, q), <) (p0 , q 0 ) aufeinander abbilden. Sie sind festgelegt durch
b1 (p) = p0 , b1 (q) = q 0 ; b2 (p) = q 0 , b2 (q) = p0 .
Satz 1 (Kongruenzsatz sws) Dreiecke ∆ABC und ∆A0 B 0 C 0 mit AB ∼
= A0 B 0 , AC ∼
= A0 C 0
0 0 0
∼
und <) BAC = <) B A C sind kongruent.
Beweis: Wir betrachten die nach 5.2 Satz 6 eindeutig existierende Bewegung b mit b(A) =
A0 , b(AB + ) = A0 B 0+ und b(ABC + ) = A0 B 0 C 0+ . Für diese Abbildung gilt ferner b(AC + ) =
A0 C 0+ (nach obigem Lemma) sowie b(B) = B 0 und b(C) = C 0 (nach III(1)). Nach Bem. 2
sind daher ∆ABC und ∆A0 B 0 C 0 kongruent.
2
Satz 2 (Kongruenzsatz wsw) Dreiecke ∆ABC und ∆A0 B 0 C 0 mit AB ∼
= A0 B 0 ,
0 0 0
0 0 0
∼
∼
<) BAC = <) B A C und <) ABC = <) A B C sind kongruent.
Beweis: (Filler, S. 91)
2
A
Satz 3 Sind in ∆ABC die Seiten AC und BC kongruent, so sind auch die Basiswinkel
<) BAC und <) ABC kongruent.
Beweis: (Filler, S. 92)
Def. 2
Ein Punkt P der Strecke AB mit AP ∼
= P B heißt Mittelpunkt von AB.
Satz 4
Jede Strecke AB besitzt genau einen Mittelpunkt.
2
Beweis: Für P ∈ AB gilt nach 5.2 Def. 3 d(A, P ) + d(P, B) = d(A, B). Also ist P
Mittelpunkt genau für d(A, P ) = 21 d(A, B). Nach III(1) gibt es genau einen Punkt P mit
dieser Eigenschaft.
2
Wir beschäftigen uns nun etwas ausführlicher mit Winkeln. Insbesondere werden wir rechte Winkel einführen.
Def. 3
Gegeben sei <) P SQ = <) (SP + , SQ+ ).
(i) Ist <) P SQ kein gestreckter Winkel, so heißt die Halbgerade SR + ⊂ In <) P SQ Winkelhalbierende von <) P SQ für <) P SR ∼
= <) RSQ.
(ii) <) (SP + , SQ− ) und <) (SP − , SQ+ ) heißen Nebenwinkel zu <) (SP + , SQ+ ).
(iii) <) (SP − , SQ− ) heißt Scheitelwinkel zu <) (SP + , SQ+ ).
(iv) Für <) (SP + , SQ+ ) ∼
= <) (SP − , SQ+ ) heißt <) (SP + , SQ+ ) ein rechter Winkel.
Satz 5
Sei <) P SQ kein gestreckter Winkel.
A
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
81
(i) Gilt d(S, P ) = d(S, Q) und T ∈ P Q, so ist ST + genau dann Winkelhalbierende, wenn T
Mittelpunkt von P Q ist.
(ii) <) P SQ besitzt genau eine Winkelhalbierende.
Beweis: (Filler, S. 92)
2
A
2
A
Satz 6 (i) Die beiden Nebenwinkel eines Winkels sind kongruent.
(ii) Nebenwinkel kongruenter Winkel sind kongruent.
(iii) Jeder Winkel ist zu seinem Scheitelwinkel kongruent.
Beweis: (Filler, S. 93)
Satz 7 Zu jeder Halbgeraden SP + gibt es in jeder Halbebene H mit der Randgeraden SP
genau einen rechten Winkel <) (SP + , SQ+ ).
Beweis: Nach 5.2 Satz 6 gibt es genau eine Bewegung b mit b(S) = S, b(SP + ) = SP −
und b(H) = H. Wegen b(SP − ) = SP + gilt b ◦ b = id. Wir beweisen zunächst drei
Hilfsbehauptungen.
(i) Für Q ∈ H \ SP und b(Q) = Q ist <) P SQ ein rechter Winkel.
Dies folgt aus
<) (SP + , SQ+ ) ∼
= b( <) (SP + , SQ+ )) = <) (SP − , SQ+ ) .
(ii) Es gibt (mindestens) einen rechten Winkel.
Für einen Punkt Q ∈ H \ SP sind zwei Fälle möglich.
• Für b(Q) = Q ist <) P SQ nach (i) ein rechter Winkel.
• Für b(Q) = Q0 6= Q wird wegen
b(QQ0 ) = Q0 b(b(Q)) = Q0 Q
die Strecke QQ0 und damit auch ihr Mittelpunkt T auf sich abgebildet. Nach (i) ist <) P ST
ein rechter Winkel.
(iii) Sind Q ∈ H \ SP und <) P SQ ein rechter Winkel, so gilt Q0 := b(Q) = Q.
Wegen
<) (SP − , SQ+ ) ∼
= <) (SP + , SQ+ ) ∼
= b( <) (SP + , SQ+ )) = <) (SP − , SQ0+ )
und Q0 ∈ H folgt aus obigem Lemma SQ+ = SQ0+ und damit Q = Q0 .
(iv) Nach (ii) gibt es mindestens einen rechten Winkel. Nach (i) und (iii) liefern genau die
Fixpunktgeraden von b durch S rechte Winkel. b 6= id besitzt nach 5.2 Kor. 3 höchstens
eine Fixpunktgerade, weshalb es auch nicht mehr als einen rechten Winkel geben kann.2
Def. 4 (i) Ein Winkel <) (p, q) heißt spitz, wenn es einen rechten Winkel <) (p, r) gibt
mit q ⊂ In <) (p, r) und q 6= r.
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
82
(ii) Ein Winkel, der kein spitzer, rechter oder gestreckter Winkel ist, heißt stumpf.
Bem. 3 (i) Nach Satz 7 sind rechte Winkel kongruent. Ferner besitzen danach auch
gestreckte Winkel eine (eindeutige) Winkelhalbierende.
(ii) Jeder Nebenwinkel eines spitzen Winkels ist ein stumpfer Winkel und umgekehrt.
Def. 5 Zwei Geraden k, l heißen zueinander senkrecht oder orthogonal (k ⊥ l), wenn
es Halbgeraden p ⊂ k und q ⊂ l gibt, die einen rechten Winkel <) (p, q) bilden (also
insbesondere den gleichen Anfangspunkt haben). Für L ∈ l heißt l Lot von L auf k und
der Schnittpunkt F der Geraden k und l dessen Fußpunkt. Ist F der Mittelpunkt der
Strecke P Q ⊂ k, so heißt l Mittelsenkrechte dieser Strecke.
Satz 8
(i) Zu jedem Punkt P und jeder Geraden g gibt es genau ein Lot von P auf g.
(ii) Jede Strecke besitzt genau eine Mittelsenkrechte.
Beweis: (i1 ) Für P ∈ g folgt die Aussage aus Satz 7.
(i2 ) Sei nun P ∈
/ g. Wir betrachten die (eindeutige) Bewegung b, die g als Fixpunktgerade
besitzt und die beiden von g berandeten Halbebenen vertauscht (siehe 5.2 Satz 6). Nach
III(2) schneidet P b(P ) die Gerade g in einem Punkt F . Für R ∈ g \ {F } gilt dann
<) (F R+ , F P +) ∼
= b( <) (F R+ , F P + )) = <) (F R+ , F b(P )+ ) = <) (F R+ , F P − ) .
Also gibt es mindestens ein Lot von P auf g. Wir nehmen nun an, dass es zwei verschiedene
Lote P A, P B (A, B ∈ g) gibt und wählen Q ∈ BP − mit d(Q, B) = d(P, B) (siehe Abb.
5.9). Nach Satz 1 (sws) gilt dann ∆ABP ∼
= ∆ABQ, weshalb <) BAQ ein rechter Winkel
cP
Ac
cB
g
cQ
Abbildung 5.9: Lote auf g
ist. Also sind AQ und AP Lote von g in A im Widerspruch zu Beweisteil (i1 ).
(ii) folgt mit Satz 4 aus (i).
2
Man beachte, dass im Beweis auch die Existenz und Eindeutigkeit des Lotfußpunktes
nachgewiesen wurde.
A
83
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
Satz 9 (Kongruenzsatz sss) Dreiecke ∆ABC und ∆A0 B 0 C 0 mit AB ∼
= A0 B 0 , AC ∼
= A0 C 0
0
0
und BC ∼
= B C sind kongruent.
Beweis: Nach IV gibt es eine Bewegung b mit b(A0 ) = A, b(B 0 ) = B und b(C 0 ) = D ∈
ABC − . Es genügt, ∆ABC ∼
= ∆ABD nachzuweisen (siehe zum Folgenden Abb. 5.10).
Cc
Cc
Cc
cM
Ac
Dc
cB
Ac
Mc
cB
Dc
Cc
M
c
c
A
cB
Ac
Dc
c
B
cD
Abbildung 5.10: Kongruenzsatz sss
Für A ∈ CD (ebenso für B ∈ CD) liefert Satz 3 (in ∆BCD) <) BCD ∼
= <) BDC. Die
Aussage folgt damit aus Satz 1 (sws).
Andernfalls gilt im gleichschenkligen Dreieck ∆ACD nach Satz 3
<) ACD ∼
= <) ADC .
Ist M der Mittelpunkt von CD, gilt daher ∆ACM ∼
= ∆ADM (siehe Satz 1). Daher ist
<) AM C ein rechter Winkel ist. Entsprechend sieht man, dass <) BM C ein rechter Winkel
ist. Die Eindeutigkeit des Lotes von CD in M (Satz 8 (i)) liefert daher M ∈ AB. Für
M ∈ AB + folgt
<) BAC = <) M AC ∼
= <) M AD = <) BAD .
Für M ∈ BA+ gilt entsprechend
<) ABC = <) M BC ∼
= <) M BD = <) ABD .
In beiden Fällen folgt die Aussage damit wieder aus Satz 1.
Satz 10
2
Die Mittelsenkrechte m einer Strecke AB ist der Ort aller Punkte P mit
d(A, P ) = d(B, P ) .
(29)
Beweis: Sei M der Mittelpunkt von AB.
(i) Für P ∈ m sind die Dreiecke ∆AM P und ∆BM P nach Satz 1 kongruent. Also gilt
(29).
(ii) Gilt umgekehrt (29) für einen Punkt P , so sind ∆AM P und ∆BM P nach Satz 9
(sss) kongruent. Also gilt
<) (M A+ , M P + ) ∼
= <) (M B + , M P + ) = <) (M A− , M P + ) ,
weshalb ein rechter Winkel vorliegt.
2
84
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
5.4
Winkel im Dreieck
Im Zentrum dieses Abschnitts steht die Frage, was man über die Innenwinkelsumme
IWS (ABC) im Dreieck ∆ABC sagen kann, ohne das Parallelenaxiom V vorauszusetzen. Dazu müssen wir den Winkeln, die wir bisher nur als geometrische Figur betrachtet
haben, eine Größe zuordnen. Wir beginnen mit dem vorbereitenden
q
r
c
r
c
q
(a)
p
(b)
p
Abbildung 5.11: Winkeladdition und -subtraktion
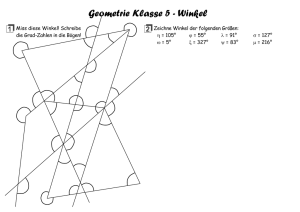
Lemma 1 Es seien p, q, r paarweise verschiedene Halbgeraden mit dem Anfangspunkt A
sowie p0 , q 0 , r 0 (paarweise verschiedene) Halbgeraden mit dem Anfangspunkt A 0 .
Aus <) (p, r) ∼
= <) (p0 , r 0 ) und <) (q, r) ∼
= <) (q 0 , r 0 ) folgt dann:
(i) Für r ⊂ In <) (p, q) (siehe Abb. 5.11 (a)) und r 0 ⊂ In <) (p0 , q 0 ) gilt <) (p, q) ∼
= <) (p0 , q 0 ).
(ii) Für q ⊂ In <) (p, r) (siehe Abb. 5.11 (b)) und q 0 ⊂ In <) (p0 , r 0 ) gilt <) (p, q) ∼
= <) (p0 , q 0 ).
Beweis: Wir beweisen exemplarisch (i). Nach Definition und 5.3 Lemma gibt es Bewegungen b1 , b2 mit b1 (p) = p0 , b1 (r) = r 0 und b2 (q) = q 0 , b2 (r) = r 0 . Zu zeigen ist b1 = b2 . b2
bildet die q enthaltende Halbebene Hq mit der Randgeraden g ⊃ r auf die q 0 enthaltende Halbebene Hq0 mit der Randgeraden g 0 ⊃ r 0 ab. Da die entsprechenden Halbebenen
Hp , Hp0 , für die b1 (Hp ) = Hp0 gilt, hiervon verschieden sind (siehe 5.2 Kor. 1 und 5.2 Bem.
3 (i)), gilt auch b2 (Hp ) = Hp0 und damit b1 = b2 .
2
Will man Winkel vergleichen, muss man ihnen eine Größe so zuordnen, dass genau kongruente Winkel dieselbe Größe erhalten. Dann ist ihnen zwar noch kein Maß zugeordnet,
aber Lemma 1 erlaubt eine repräsentantenunabhängige Definition der Addition und Subtraktion dieser Größen. Dazu seien p, q, r paarweise verschiedene Halbgeraden mit dem
Anfangspunkt A. Ferner sei <) (p, r) ein Winkel der Größe α und <) (r, q) ein Winkel der
Größe β. Für r ⊂ In <) (p, q) (siehe Abb. 5.11 (a)) heißt dann die Größe γ des Winkels
<) (p, q) die Summe von α und β (γ = α + β). Entsprechend definiert man die Differenz
(α = γ − β, β = γ − α). Ist <) (p, r) kein Nullwinkel, so heißt der Winkel <) (r, q) kleiner
als der Winkel <) (p, q) (genauer: die Größe β heißt kleiner als die Größe γ). Die Relation „<“ ist in der Menge der Kongruenzklassen eine strenge Ordnungsrelation (irreflexive
Totalordnung). Die kleinste Größe hat ein Nullwinkel, die größte ein gestreckter Winkel.
Gedanklich ist es nun nur noch ein kleiner Schritt, jeder Winkelgröße eine Maßzahl zuzuordnen. Nullwinkel erhalten das Maß Null, gestreckte Winkel erhalten das Maß π (man
könnte natürlich auch jede andere von 0 verschiedene reelle Zahl nehmen). Größere Winkel treten in diesem Konzept nicht auf. Diese Einschränkung ist jedoch für die eingangs
gestellte Aufgabe unerheblich. Rechte Winkel haben nach obiger Addition das Maß π2 .
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
85
Das Maß eines beliebigen Winkels ist (aufwendiger) durch Intervallschachtelung zu bestimmen. Umgangssprachlich wird auch das Maß eines Winkels kurz Winkel genannt.
Dieser Sprechweise werden wir uns bisweilen anschließen, wobei uns aber der Unterschied
zwischen einem Winkel als geometrischer Figur und seinem Maß stets bewusst bleiben
muss.
Dass die Maßbestimmung von Strecken einfacher war, lag daran, dass bei Strecken Axiom
III(1) bereits das Maß liefert. In anderen Axiomensystemen ist auch bei der Einführung
eines Streckenmaßes wie oben beschrieben vorzugehen.
Wir wenden uns nun den Winkeln im Dreieck zu. Dazu benötigen wir neben den (bisher
betrachteten) Innenwinkeln auch die Außenwinkel eines Dreiecks.
Def. 1 In ∆ABC heißen die Winkel <) (AB + , AC + ), <) (BA+ , BC + ) und <) (CA+ , CB + )
die Innenwinkel und ihre Nebenwinkel die Außenwinkel des Dreiecks.
Satz 1
Jeder Innenwinkel eines Dreiecks ist kleiner als jeder nicht anliegende Außenwinkel.
Beweis: Wir zeigen <) (AB + , AC + ) < <) (BA+ , BC − ) oder gleichbedeutend damit
∃P ∈ In <) (BA+ , BC − ) \ (AB ∪ BC) : <) (AB + , AC + ) ∼
= <) (BA+ , BP + ) .
(30)
Sei M der Mittelpunkt von AB und P ∈ M C − mit d(C, M ) = d(M, P ) (siehe Abb. 5.12).
cC
Ac
cM
cB
c
P
Abbildung 5.12: Zu Satz 1
(i) Nach 5.3 Satz 1 (sws) gilt ∆AM C ∼
= ∆BM P und damit die Kongruenz in (30).
(ii) P ∈
/ AB ∪ BC ist klar.
(iii) Wegen M ∈ (CP ) und M ∈ (AB) schneidet (CP ) die Gerade AB. Also liegen C und
P in verschiedenen von AB berandeten Halbebenen und es gilt P ∈ BAC − .
(iv) Wegen M P ∩ BC = {C} und C ∈
/ M P gilt BC ∩ M P = ∅.
Wegen AM ∩ BC = {B} und B ∈
/ AM gilt BC ∩ AM = ∅.
A, M, P liegen daher in derselben von BC berandeten Halbebene, d. h. es gilt P ∈
BCA+ .
2
Korollar 1
(i) In jedem Dreieck sind mindestens zwei Innenwinkel spitz.
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
86
(ii) In jedem Dreieck ist die Summe zweier beliebiger Innenwinkel kleiner als π.
Beweis: (i) Gibt es einen spitzen oder rechten Außenwinkel, so folgt die Aussage aus Satz
1. Andernfalls ist sie klar.
(ii) folgt unmittelbar aus Satz 1.
2
Satz 2 In einem Dreieck ∆ABC liegt dem größeren Innenwinkel stets die größere Seite
gegenüber und umgekehrt.
Beweis: Wir zeigen
d(A, C) > d(B, C) ⇐⇒ <) (AB + , AC + ) < <) (BA+ , BC + ) .
(⇒) Es gibt ein D ∈ (AC) mit d(C, D) = d(C, B) (siehe Abb. 5.13). Damit gilt
cC
Dc
Ac
cB
Abbildung 5.13: Zu Satz 2
<) (BA+ , BC + )
Def.
>
5.3 Satz 3
∼
=
Satz 1 in
>
∆ABD
<) (BD + , BC + )
<) (DB + , DC + )
<) (AB + , AC + ) .
(⇐) Nach Beweisteil (⇒) und 5.3 Satz 3 gilt
d(B, C) ≥ d(A, C) ⇒ <) (BA+ , BC + ) ≤ <) (AB + , AC + ) .
Dies ist äquivalent zu
d(B, C) < d(A, C) ⇐ <) (BA+ , BC + ) > <) (AB + , AC + )
bzw.
<) (AB + , AC + ) < <) (BA+ , BC + ) ⇒ d(A, C) > d(B, C) ,
was zu zeigen war.
2
Zusammen mit Kor. 1 (i) folgt aus Satz 2 unmittelbar das
Korollar 2 Sind g eine Gerade, F der Fußpunkt des Lotes von P ∈
/ g auf g und Q 6= F
ein beliebiger Punkt von g, so gilt d(P, Q) > d(P, F ).
87
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
Def. 2 Der Abstand d(P, g) eines Punktes P von einer Geraden g ist definiert als der
Abstand d(P, F ) von P zum Lotfußpunkt F des Lotes von P auf g.
Lemma 2 Für jedes Dreieck ∆ = ∆ABC gibt es ein Dreieck ∆0 mit IWS (∆) = IWS (∆0 ),
das einen Innenwinkel besitzt, der höchstens halb so groß ist wie <) (AB + , AC + ).
Beweis: Sei M der Mittelpunkt der Strecke BC und D ∈ M A− mit d(A, M ) = d(M, D)
(D existiert nach III(1)). Dann gilt nach 5.3 Satz 1 (sws) ∆ABM ∼
= ∆DCM , also mit
den Bezeichnungen von Abb. 5.14 α2 = δ und β = γ2 , woraus
C c
γ1 γ2
δ
c
Ac
α1
α2
D
c
M
β
cB
Abbildung 5.14: Zu Lemma 2
IWS (ABC) = α1 + α2 + β + γ1 = α1 + δ + γ1 + γ2 = IWS (ADC)
folgt. Wegen
α1 + δ = α1 + α2 = <) (AC + , AB + ) =: α
gilt ferner α1 ≤
Satz 3
α
2
oder δ ≤ α2 .
2
Die Innenwinkelsumme eines Dreiecks beträgt höchstens π.
Beweis: Wir nehmen IWS (∆) = π + ε, ε > 0 an. Ist α ein Innenwinkel von ∆, so
gibt es nach Lemma 2 ein Dreieck ∆1 gleicher Innenwinkelsumme und einem Innenwinkel
α1 ≤ α2 . Durch Induktion folgt für jedes n ∈ N die Existenz eines Dreiecks ∆n mit einem
Innenwinkel αn ≤ 2αn . Wählt man nun n ∈ N so, dass 2αn < ε gilt, erhält man für die
restlichen Innenwinkel βn , γn von ∆n
α
βn + γn = IWS (∆n ) − αn ≥ π + ε − n > π
2
im Widerspruch zu Aussage (ii) von Korollar 1.
2
Lemma 3 ∆ABC habe bei C einen rechten Winkel. Ferner sei D ∈ BC − mit d(C, B) =
d(B, D) (siehe Abb. 5.15). Dann folgt aus IWS (ABC) = π auch IWS (ADC) = π.
Beweis: Wir betrachten die Abbildung b, die A auf B, B auf A und ABC + auf ABC −
abbildet. Mit E := b(C) gilt dann
<) (CA+ , CB + )
<) (BC + , BA+ )
<) (AC + , AB + )
∼
=
∼
=
∼
=
<) (EB + , EA+ ) ,
<) (AE + , AB + ) ,
<) (BA+ , BE + ) .
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
Cc
cB
Ac
88
cD
Ec
cF
Abbildung 5.15: Zu Lemma 3
Somit sind alle Winkel im Viereck AEBC rechte Winkel. Daher gilt nach 5.3 Satz 1 (sws)
∆ABC ∼
= ∆EDB
und für F ∈ EA− mit d(A, E) = d(E, F ) auch
∆AEB ∼
= ∆EF D .
Also sind die Vierecke AEBC und EF DB kongruent, so dass alle Winkel im Viereck
AF DC rechte Winkel sind. Nach Satz 3 haben daher die beiden Teildreiecke ∆ADC und
∆AF D die Innenwinkelsumme π.
2
Lemma 4 Gibt es ein rechtwinkliges Dreieck ∆ABC mit IWS (ABC) = π, so hat jedes
rechtwinklige Dreieck diese Winkelsumme.
Beweis: Sei ∆DEF ein beliebiges, bei F rechtwinkliges Dreieck. Ist ∆ABC bei C
rechtwinklig, so gibt es nach Lemma 3 ein bei C rechtwinkliges Dreieck ∆A0 B 0 C mit
IWS (A0 B 0 C) = π, d(A0 , C) > d(D, F ) und d(B 0 , C) > d(E, F ) (siehe Abb. 5.16). Mit
Cc
cE
0
cB
0
D0 c
A0 c
Abbildung 5.16: Zu Lemma 4
D 0 ∈ CA0 , d(D 0 , C) = d(D, F ) und E 0 ∈ CB 0 , d(E 0 , C) = d(E, F ) erhält man ein zu
∆DEF kongruentes Dreieck ∆D 0 E 0 C und es genügt, IWS (D 0 E 0 C) = π nachzuweisen.
Wegen
π = IWS (A0 B 0 C) = IWS (A0 E 0 C) + IWS (A0 B 0 E 0 ) − π
gilt
IWS (A0 E 0 C) + IWS (A0 B 0 E 0 ) = 2π ,
also nach Satz 3
IWS (A0 E 0 C) = IWS (A0 B 0 E 0 ) = π .
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
89
Mit dem gleichen Argument folgt
IWS (A0 E 0 D 0 ) = IWS (D 0 E 0 C) = π .
2
Satz 4 Gibt es ein Dreieck ∆ABC mit IWS (ABC) = π, so hat jedes Dreieck die Innenwinkelsumme π.
Beweis: (i) Wir zeigen zunächst, dass alle rechtwinkligen Dreiecke die Innenwinkelsumme
π haben. Ist ∆ABC rechtwinklig, folgt dies aus Lemma 4. Andernfalls sei der Winkel bei
C der größte Innenwinkel. Dann gilt nach Satz 2
d(A, B) ≥ d(A, C) und d(A, B) ≥ d(B, C) .
Fällt man von C das Lot auf AB (Fußpunkt D), so liegt in ∆ADC und ∆DBC nach
Satz 3 der größte Winkel bei D. Also gilt nach Satz 2
d(A, C) ≥ d(A, D) > 0 und d(B, C) ≥ d(B, D) > 0 .
Die Annahme Zw(D, A, B) liefert den Widerspruch
d(D, B) = d(D, A) + d(A, B) ≥ d(D, A) + d(B, C) > d(B, C) .
Aus dem gleichen Grund ist Zw(D, B, A) ausgeschlossen. Also gilt Zw(A, D, B) (siehe
Abb. 5.17) und damit
C c
Ac
Dc
cB
Abbildung 5.17: Zur Innenwinkelsumme im Dreieck
IW S(ADC) + IW S(DBC) = IWS (ABC) + π = 2π .
Aus Satz 3 folgt hieraus
IW S(ADC) = IW S(DBC) = π .
Auch in diesem Fall folgt also die Behauptung aus Lemma 4.
(ii) Ist ∆EF G ein beliebiges Dreieck, so kann es wie in (i) beschrieben in zwei rechtwinklige
Dreiecke zerlegt werden, deren Innenwinkelsumme nach (i) jeweils π beträgt.
2
90
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
s
q
c
c
r
p
Abbildung 5.18: Stufenwinkel
5.5
Das Parallelenaxiom
Keine der bisher bewiesenen Aussagen setzt das Parallelenaxiom V voraus. Sie gehören
alle zur absoluten Geometrie. Bevor wir uns jetzt dem Parallelenaxiom zuwenden und
zahlreiche dazu äquivalente Aussagen beweisen, werden wir im Satz 2 untersuchen, was
man über die Existenz von Parallelen weiß, wenn man V nicht voraussetzt, und uns zwei
Beweisversuche des Parallelenaxioms ansehen.
Def. 1 Zwei Winkel heißen Stufenwinkel, wenn ein Schenkel p des einen Winkels Teilmenge eines Schenkels r des anderen Winkels ist und die beiden übrigen (so genannten
freien) Schenkel in derselben von der Geraden g ⊃ p, r berandeten Halbebene liegen
(siehe Abb. 5.18).
Satz 1 Sind die Stufenwinkel <) (SQ+ , SR+ ) und <) (S 0 Q0+ , S 0 R0+ ) kongruent, so sind die
Trägergeraden der freien Schenkel parallel.
Beweis: Es gelte S 0 Q0+ ⊂ SQ+ .
(i) Wir nehmen zunächst an, dass es einen Punkt X ∈ SR+ ∩ S 0 R0+ gibt (siehe Abb.
5.19). Dann sind <) (SQ+ , SR+ ) ein Innenwinkel und <) (S 0 Q0+ , S 0 R0+ ) ein Außenwinkel
cX
c R0
R c
Sc
Qc
cS
0
cQ
0
Abbildung 5.19: Stufenwinkelsatz
von ∆SS 0 X. Nach 5.4 Satz 1 sind diese Winkel im Widerspruch zur Voraussetzung nicht
kongruent.
(ii) Die Annahme, dass es einen Punkt X ∈ SR− ∩ S 0 R0− gibt, führt man zum Widerspruch, indem man die Winkel <) (SQ− , SR− ) und <) (S 0 Q0− , S 0 R0− ) betrachtet, die als
Scheitelwinkel zu den Ausgangswinkeln kongruent sind.
2
Satz 2 Zu jeder Geraden g und jedem nicht auf g liegenden Punkt P gibt es mindestens
eine Gerade h, die P enthält und zu g parallel ist.
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
91
Beweis: Sei f eine beliebige Gerade durch P . Für f kg ist der Satz gezeigt. Andernfalls
schneidet f die Gerade g in einem Punkt Q. Man trägt nun an P Q+ einen zu <) (g + , QP − )
kongruenten Stufenwinkel an und erhält so nach Satz 1 eine Parallele zu g durch P . 2
Bem. 1 Die zahlreichen Versuche, das Parallelenaxiom aus den Axiomgruppen I - IV
herzuleiten, sahen oft so aus, dass man eine Aussage A als zu V äquivalent nachwies und
dann A bewies. Wir werden dies an zwei Beispielen vorführen. In Satz 4 werden wir die
Äquivalenz folgender Aussagen zeigen.
(a) Es gilt das Parallelenaxiom V.
(b) Es gibt ein Dreieck mit der Innenwinkelsumme π.
(c) Stufenwinkel an geschnittenen Parallelen sind kongruent.
Auf diesen (korrekten) Äquivalenzen beruhen die beiden folgenden Beweisversuche des
Parallelenaxioms.
„Satz“ Es gibt ein Dreieck ∆(ABC) mit IWS (ABC) = π.
„Beweis“ (nach Legendre): Sei <) (u, v) ein spitzer Winkel mit dem Scheitel S. Wir betrachten in einem Punkt A0 ∈ u \ {S} das Lot von u und dessen Schnittpunkt B0 mit v
(existiert, da der gewählte Winkel spitz ist; siehe Abb. 5.20).
c
cA0
cA1
S
u
c
B0
c
B1
v
Abbildung 5.20: Zum „Beweis“ von Legendre
Für IWS (SA0 B0 ) = π ist der Satz bewiesen. Andernfalls gilt nach 5.4 Satz 3
IWS (SA0 B0 ) = π − ε mit ε > 0. Wir wählen nun A1 ∈ A0 S − mit d(S, A0 ) = d(A0 , A1 ).
Wegen ∆SA0 B0 ∼
= ∆A1 A0 B0 (sws) gilt IWS (A1 A0 B0 ) = π − ε. Trifft das Lot von u in
A1 den Strahl v in B1 , so folgt
IWS (SA1 B1 ) = IWS (SA0 B0 ) + IWS (A1 A0 B0 ) + IWS (B0 B1 A1 ) − 2π
= IWS (B0 B1 A1 ) − 2ε ≤ π − 2ε .
Nach n Schritten hat man
IWS (SAn Bn ) ≤ π − 2n ε .
Damit gibt es ein n0 ∈ N mit IWS (SAn0 Bn0 ) ≤ 0, was ein Widerspruch ist.
Wo steckt der Fehler?
2
92
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
Die Existenz der Punkte Bi ist nicht gesichert. Die bewiesene Aussage lautet also: Gibt es
einen spitzen Winkel, bei dem jedes Lot auf einen Schenkel den anderen Schenkel schneidet,
dann gibt es ein Dreieck mit der Innenwinkelsumme π.
„Satz“ Stufenwinkel an geschnittenen Parallelen f, g sind kongruent.
„Beweis“ (nach John Wallis (1616-1703)): Wir zeigen
Stufenwinkel nicht kongruent ⇒ f und g nicht parallel.
h schneide die Geraden f, g und es gelte in Abb. 5.21 o. E. f ⊥ h und α < π2 (diese
Annahmen sind zulässig!). Es seien P2 ∈ g und Q2 der Fußpunkt des Lotes von P2 auf h.
f
Pc
g
P1 c
Q2 c
Gc
α
c
Q1
c
F
c
Q
h
c
P2
Abbildung 5.21: Zum „Beweis“ von J. Wallis
Für Zw(Q2 , G, F ) wählen wir Punkte P1 ∈ GP2− , Q1 ∈ GQ−
2 mit d(P1 , G) = d(P2 , G) und
d(Q1 , G) = d(Q2 , G). Andernfalls sei Q2 = Q1 , P2 = P1 .
Für Zw(G, F, Q1 ) ist man fertig. Nach Satz 1 gilt nämlich P1 Q1 k f , so dass nach 5.2 Satz
3 f die Seite GP1 schneidet. Andernfalls gibt es ein n ∈ N so, dass
d(G, Q) = n · d(G, Q1 ), d(G, P ) = n · d(G, P1 ) und Zw(G, F, Q)
gilt. Man kann nun wie oben argumentieren, wenn man P1 , Q1 durch P, Q ersetzt.
2
Wo steckt der Fehler?
Es wird unterstellt, dass die Dreiecke ∆GP1 Q1 und ∆GP Q ähnlich sind, weil sie im
Verhältnis zweier Seiten und dem Zwischenwinkel übereinstimmen. Die Existenz ähnlicher,
aber nicht kongruenter Dreiecke folgt jedoch erst aus dem Parallelenaxiom.
In weiteren Beweisversuchen des Parallelenaxioms spielen die folgenden Vierecke eine
Rolle, die wir später noch benötigen.
Def. 2 Ein Viereck ABCD, in dem <) DAB und <) ABC rechte Winkel sind und in dem
d(A, D) = d(B, C) gilt, heißt Saccheri-Viereck.
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
D
c
Ac
93
c
C
cB
Abbildung 5.22: Saccheri-Viereck
In einem Saccheri-Viereck gemäß Def. 2 gilt (siehe Abb. 5.22):
(i) <) ADC ∼
= <) BCD.
Satz 3
(ii) Kein Winkel ist größer als π2 .
Beweis: (i) Nach 5.3 Satz 1 (sws) gilt ∆ABD ∼
= ∆BAC, also d(A, C) = d(B, D) und
∼
damit nach 5.3 Satz 10 (sss) ∆BCD = ∆ADC.
(ii) ist wegen (i) klar nach 5.4 Satz 3.
2
Bem. 2 Im Saccheri-Viereck von Def. 2 sind also die kongruenten Winkel bei C und D
höchstens π2 groß. Sind sie in einem solchen Viereck gleich π2 , gilt also in einem SaccheriViereck die Hypothese vom rechten Winkel, so haben nach 5.4 Satz 3 und Satz 4 alle
Dreiecke die Innenwinkelsumme π.
Satz 4 In der absoluten Ebene sind die folgenden Aussagen äquivalent.
(i) Es gilt das Parallelenaxiom V: Zu jeder Geraden g und jedem nicht auf g liegenden Punkt
P gibt es höchstens eine Gerade, die P enthält und zu g parallel ist.
(ii) Zu jeder Geraden g und jedem nicht auf g liegenden Punkt P gibt es genau eine Gerade,
die P enthält und zu g parallel ist.
(iii) Stufenwinkel an geschnittenen Parallelen sind kongruent.
(iv) In jedem Dreieck ∆ gilt IWS (∆) = π.
(v) Es gibt ein Dreieck ∆ mit IWS (∆) = π.
(vi) Abstandslinien sind Geraden.
(vii) Es gibt ein Saccheri-Viereck, das die Hypothese vom rechten Winkel erfüllt.
(viii) Es gibt zwei Dreiecke mit übereinstimmenden Innenwinkeln, die nicht kongruent sind.
Beweis: (a) Wir zeigen zunächst die Äquivalenz der Aussagen (i) - (v).
(iv) ⇐⇒ (v) klar nach 5.4 Satz 4.
(i) ⇒ (ii) klar nach Satz 2.
(ii) ⇒ (iii) Gibt es geschnittene Parallelen mit nicht kongruenten Stufenwinkeln, so liefert
Satz 1 eine zweite Parallele im Widerspruch zur Voraussetzung.
(iii) ⇒ (iv) klar nach Abb. 5.23.
(iv) ⇒ (i) Seien a eine Gerade, P ∈
/ a und A0 der Fußpunkt des Lotes von P auf a. Ferner
sei p das Lot von A0 P in P (siehe Abb. 5.24). Nach Satz 1 gilt dann p k a. Es ist zu zeigen,
94
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
c
c
c
Abbildung 5.23: Innenwinkelsumme und Stufenwinkel
Pc
p
α1 α2
cQ
A0 c
cA1
cA2
cAn
a
Abbildung 5.24: Innenwinkelsumme und Parallelenaxiom
dass eine beliebige Gerade g 6= p durch P die Gerade a schneidet. Dazu wählen wir Q ∈ g
+
so, dass <) (P A+
0 , P Q ) ein spitzer Winkel der Größe
β=
π
− ε, ε > 0
2
ist, und Punkte Ai ∈ a ∩ P A0 Q+ mit
d(Ai−1 , Ai ) = d(P, Ai−1 ) (i = 1, 2, 3, . . .) .
Die Dreiecke ∆P Ai−1 Ai (i = 1, 2, 3, . . .) sind dann gleichschenklig. Für ihre Basiswinkel
αi = <) Ai−1 P Ai gilt nach 5.3 Satz 3 α1 = π4 und αi = αi−1
, also
2
αi =
Hieraus folgt
+
<) (P A+
0 , P An )
Damit gibt es ein n ∈ N mit
π
2i+1
=
π1
.
2 2i
n
πX 1
π 2n − 1
π
π
=
=
= − n+1 .
i
n
2 i=1 2
2 2
2 2
+
<) (P A+
0 , P An ) > β ,
+
+
also mit Q ∈ P A0 A+
n ∩ P An A0 . Nach 5.2 Bem. 3 (i) schneidet daher P Q die Strecke
A0 An .
(b) (i)-(v) ⇒ (vi) Seien d(P, g) = c > 0, h die Parallele zu g durch P sowie Q ∈ h \ {P }
beliebig (siehe Abb. 5.25). Sind K, L die Fußpunkte der Lote von P bzw. Q auf g, so gilt
nach Satz 1 P K k QL. Daher sind nach (iii) die Dreiecke ∆KLP und ∆QP L kongruent
(wsw) und es gilt
c = d(P, K) = d(Q, L) = d(Q, g) .
95
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
Pc
cQ
Kc
cL
S
cR
c
h
c
g
Abbildung 5.25: Abstandslinien
Gilt umgekehrt d(R, g) = c für einen beliebigen Punkt R ∈ gP + und ist S der Schnittpunkt des Lotes von R auf g mit h, so gilt
d(R, g) = c = d(S, g) ,
also R = S ∈ h.
(vi) ⇒ (vii) Sei P ∈
/ g. Wir wählen zwei verschiedene Punkte Q, R ∈ gP + \ {P } mit
d(P, g) = d(Q, g) = d(R, g) und Zw(Q, P, R)
und fällen die Lote von P, Q, R auf g (Fußpunkte A, B, C; siehe Abb. 5.26). Dann sind
Qc
cP
cR
Bc
cA
cC
g
Abbildung 5.26: Saccheri-Vierecke
AP QB und ACRP Saccheri-Vierecke, in denen nach Satz 3 kein Winkel größer als π2 ist.
Da sich <) QP A und <) AP R als Nebenwinkel zu π ergänzen, ist also jeder von ihnen ein
rechter Winkel. Somit ist nach Satz 3 (i) im Saccheri-Viereck AP QB die Hypothese vom
rechten Winkel erfüllt.
(vii) ⇒ (iv) klar nach Bem. 2.
(c) (i)-(v) ⇒ (viii) Zu einem gegebenen Dreieck ∆ABC wählen wir einen Punkt D mit
BA− = BD + und betrachten die Parallele g zu BC durch D (siehe Abb. 5.27 (a)). Ist
p ⊂ g ∩ ABC + die Halbgerade mit Anfangspunkt D, so gilt nach (iii)
<) (BA+ , BC + ) ∼
= <) (DA+ , p) .
g schneidet AC in einem Punkt E (andernfalls wären AC und BC Parallelen zu g durch
C). Wiederum liefert (iii)
<) ACB ∼
= <) AED .
96
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
D
B
c
c
E
c
c
B
p⊂g
C
Ac
E0
c
cC
c
c
F0
Ac
(a)
(b)
Abbildung 5.27: Ähnliche Dreiecke
(viii) ⇒ (v) Seien ∆ABC und ∆DEF nicht kongruente Dreiecke mit kongruenten Innenwinkeln. Wir wählen
E 0 ∈ AB +
F 0 ∈ AC +
mit
mit
d(A, E 0 ) = d(D, E) ,
d(A, F 0 ) = d(D, F )
(siehe Abb. 5.27 (b)). Die Dreiecke ∆AE 0 F 0 und ∆DEF sind dann kongruent (sws). Ferner
gilt nach Satz 1 E 0 F 0 ∩ BC = ∅. E 0 F 0 CB ist also ein Viereck mit der Innenwinkelsumme
2π. Wegen 5.4 Satz 3 gilt daher IWS (CE 0 F 0 ) = IWS (BCE 0 ) = π.
2
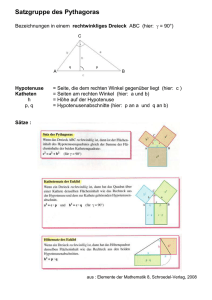
Bem. 3 Nach Satz 4 ist klar, dass Ähnlichkeitsbetrachtungen (zentrische Streckungen,
Strahlensätze) zur euklidischen, nicht aber zur absoluten Geometrie gehören. Weitere
Ergebnisse dieser Art sind etwa die Schnittaussagen von 2.1 Satz 4 oder die Satzgruppe
des Pythagoras. Der „Lehrsatz des Pythagoras“ wird am kürzesten dadurch bewiesen,
dass man ein rechtwinkliges Dreieck durch die Höhe auf die Hypotenuse in zwei zum
Ausgangsdreieck ähnliche Teildreiecke zerlegt. Einen Beweis, der die Winkelsumme im
Dreieck verwendet, gab der amerikanische Präsident Garfield an (siehe Abb. 5.28 und
Abb. 5.29):
1
1
(a + b)2 = Trapezfläche = Summe der Dreiecksflächen = ab + c2 .
2
2
A
5 EIN AXIOMENSYSTEM DER EUKLIDISCHEN GEOMETRIE
Abbildung 5.28: Präsident Garfield
c
a
b
c
b
a
Abbildung 5.29: Satz des Pythagoras
97