Elektrizitätslehre 3 Kapitel 6 Signalausbreitungskanäle
Werbung

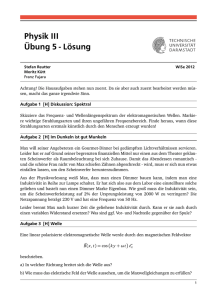
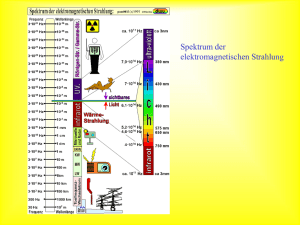
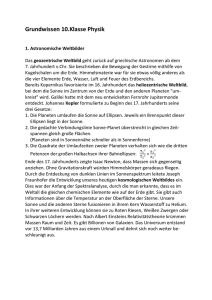
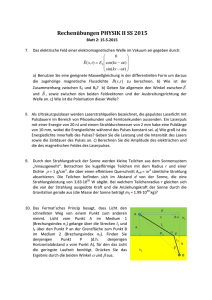
Elektrizitätslehre 3 Kapitel 6 Signalausbreitungskanäle Martin Schlup 12. Februar 2009 Inhaltsverzeichnis 1 Einleitung 3 2 Leitungen 2.1 Leitungsmodell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 Reflexion und Leitungsanpassung . . . . . . . . . . . . . . . . . . . . . . . . . . 4 5 6 3 Wellenleiter, Antennen und Freiraumausbreitung 3.1 Elektromagnetische Wellen . . . . . . . . . . . . . . . 3.2 Wellenleiter . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Antennen . . . . . . . . . . . . . . . . . . . . . . . . . 3.4 Freiraumausbreitung . . . . . . . . . . . . . . . . . . . 3.4.1 Freitraum- und Streckendämpfung . . . . . . . 3.4.2 Physikalische Effekte bei der Wellenausbreitung 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 8 10 12 13 13 13 1 Einleitung Leitungen können mittels metallischen Leitern mit einem Hin- und einem Rückleiter gebildet werden (z. B. Zweidrahtleitung oder Koaxialkabel ). In diesen fliessen Ströme und es können im Allgemeinen Spannungen und Stromstärken wie gewohnt gemessen werden. Bei Leitungen unterscheidet man zwischen Leitungen vom Freileitungstyp, welche sich nahezu wie verlustlose Leitungen verhalten, und solche vom Kabeltyp bei denen die kapazitiven Eigenschaften dominieren und sich nicht eignen für hochfrequente und lange Verbindungen. Eine etwas andere Art von Leitungen, bei denen keine gut definierten Ströme und Spannungen mehr herrschen, sind die Wellen- und Lichtleiter, welche bei hohen und sehr hohen Frequenzen eingesetzt werden, in etwa die Hohlleiter in der Radartechnik und die optischen Fasern für breitbandige Kommunikation. Bei diesen beiden Arten von Leitern spricht man allgemein von Wellenleitern, da im Gegensatz zu den Leitungen nicht Ströme im gewohnten Sinne fliessen, sondern elektromagnetische Wellen geführt werden. 3 2 Leitungen Speist man am Anfang einer Leitung ein Signal ein, so breitet es sich über die Leitung aus. Dies geschiet sehr schnell, aber doch mit endlicher Geschwindigkeit. Die höchst mögliche Ausbreitungsgeschwindigkeit ist die Lichtgeschwindigkeit. Diese beträgt im Vakuum bekanntlich c = 299792458 m/s ≈ 3 · 108 m/s = 0.3 m/ns. In elektrischen Leitungen ist die effektive Ausbreitungsgeschwindigkeit kleiner: zum Beispiel in Koaxialkabeln 60% bis 70% von c. Damit „liegt“ ein wechselndes Signal über die Leitungslänge verteilt auf dem Kabel. Wird am Kabelanfang ein genügend kurzer Puls gegeben, so kann dieses Signal abgeschlossen werden bevor es am Leitungsende beobachtet werden kann. Gedanklich kann bei angehaltener Zeit, mit einem Meterband entlang der Leitung nachmessen werden über welche Länge sich der Puls erstreckt. Im Fall eines harmonischen Signals bezeichnet man die Distanz die einer Periodendauer entspricht als Wellenlänge und kennzeichnet sie mit dem Buchstaben λ (Lambda). Zwischen der Wellenlänge λ, der Ausbreitungsgeschwindigkeit v des Signals und der Signalfrequenz f besteht die einfache Beziehung: λ = v/f (2.1) Physikalisch lassen sich die Ausbreitungsvorgänge elektrischer Signale in Leitungen genau gleich beschreiben, wie die Ausbreitung von Licht im Vakuum oder in Lichtleitern. Beides sind elektromagnetische Wellen, die sich nur durch verschiedene Wellenlängen unterscheiden. Zwei typische Eigenschaften von Wellen spielen auch bei Bussystemen eine bedeutende Rolle. Es sind dies die Reflexion und die Überlagerung. Dies kann wie folgt veranschaulicht werden: Trifft eine Wasserwelle auf eine Wand, so stellt man fest, dass sie dort „abprallt“ und in entgegengesetzter Richtung zurückläuft. Dort wo sich dabei zwei Wasserwellen begegnen, addieren sich die Wellenberge zur doppelten Höhe (Wellentäler zu doppelter Tiefe) und ein Wellental kann einen Wellenberg kompensieren. Genau so, wie die Wellen im Wasser, verhalten sich auch die elektromagnetischen Wellen, z. B. auf einem Buskabel. Trifft eine Signalwelle auf das Leitungsende (Wand), so wird sie dort reflektiert und kommt wieder zum Sender zurück. Dabei überlagern sich die hin- und die rücklaufende Signalwellen (additiv). Untersucht man diese Erscheinungen etwas eingehender, so stellt man fest, dass eigentlich immer dann Reflexionen auftreten, wenn eine Welle von einem Transportmedium in ein anderes wechselt. Die Welle teilt sich dann auf in eine weiterlaufende und eine reflektierte Teilwelle. Man kann diesen Effekt sehr gut an einer Fensterscheibe feststellen. Dort wo die Lichtstrahlen auf die Glassscheibe treffen, wechselt das physikalische Transportmedium von Luft in Glas. Die Transporteigenschaften dieser beiden Materialien sind nicht exakt gleich, also entsteht an der Übergangsstelle eine Teilreflexion. Ein von uns ausgehender Lichtstrahl geht somit nur zum Teil durch die Scheibe hindurch, ein kleinerer Anteil wird zurückgeworfen. Wir stellen ein schwaches Spiegelbild fest. Schnelle elektrische Signale verhalten sich auf Leitungen genau gleich. Ein elektrischer Puls 4 2 Leitungen läuft mit endlicher Geschwindigkeit über eine Leitung. An Stossstellen, wie z. B. dem Leitungsende oder Leitungsverzweigungen, können Reflexionen auftreten, die das ursprüngliche Signal massiv verfälschen können. 2.1 Leitungsmodell Um das Verhalten von Leitungen beschreiben zu können, macht man sich in der Praxis eine Modellvorstellung. Dabei stellt man sich vor, dass eine Leitung in sehr viele, dafür aber auch kurze Leitungselemente der Länge ∆x unterteilt wird. Jedes Leitungselement wird durch diskrete elektrische Elemente modelliert (cf. Abbildung 2.1). Das Modell der gesamten Leitung setzt sich dann aus der Kettenschaltung dieser vielen Teilsegmente zusammen. Die Werte der Abbildung 2.1: Leitungselement der Länge ∆x mit Widerstand ∆R, Induktivität ∆L, Isolationsleitwert ∆G und Kapazität ∆C Elemente ∆R, ∆L, ∆G und ∆C lassen sich aus den sogenannten Leitungsbelägen R0 , L0 , G0 und C0 bestimmen1 : ∆R = ∆R0 · ∆x ∆L = ∆L0 · ∆x ∆G = ∆G0 · ∆x ∆C = ∆C0 · ∆x Dabei bedeuten: R0 elektrischer Widerstandsbelag der Leitung L0 Selbstinduktivitätsbelag der Leitung G0 Leitwertbelag zwischen den Leitern der Leitung C0 Kapazitätsbelag zwischen den Leitern der Leitung [R0 ] = Ω/m [L0 ] = H/m [G0 ] = Ω−1 /m [C0 ] = F/m Mit diesem Modell kann gezeigt werden, dass die Ausbreitungsgeschwindigkeit des Signals (Welle) folgenden Wert aufweist: 1 v=√ 0 0 (2.2) LC Bemerkung: Interessant ist die Tatsache, dass die Wellenausbreitungsgeschwindigkeit (2.2) nur von den elektrischen und magnetischen Eigenschaften des Isolationsmaterials zwischen den Leitern der Leitung abhängt. 1 Unter Belag versteht man die betrachtete Grösse bezogen auf eine Einheit, hier die Längeneinheit. 5 2 Leitungen Weiter kann der Strom- und Spannungsverlauf über die gesammte Leitungslänge berechnet werden. Einfache Verhältnisse erhält man für die verlustlose Leitung bei der R0 = 0 und G0 = 0 angenommen werden. Bildet man für irgend eine Stelle der verlustlosen Leitung (und irgend einen Zeitpunkt) das Verhältnis von Spannung zu Stromstärke für eine Welle, so erhält man den für die Leitung charakteristische Wellenwiderstand: r Rw = L0 C0 (2.3) Bemerkungen: • Diese Grösse hat die Einheit eines Widerstands: [Rw ] = Ω. Typische Wellenwiderstandswerte sind: Koaxialkabel 50 Ω verdrillte Zweidrahtleitungen 100 bis 150 Ω Freileitungen 400 bis 600 Ω • Der Wellenwiderstand darf nicht mit dem Gleichstromwiderstand der Leitung verwechselt werden. Die Messung mit einem Ohm-Meter liefert nicht den Wellenwiderstand! Der Wellenwiderstand beschreibt das Verhältnis zwischen Spannung und Stromstärke zu jedem Zeitpunkt und an jedem Ort auf der Leitung für eine laufende Welle. Da gleichzeitig mehrere Wellen auf der Leitung auch gegenläufig unterwegs sein können, ist im Allgemeinen das Verhältnis der resultierenden Spannung zur resultierenden Stromstärke nicht identisch mit dem Wellenwiderstand. • Die angegebene Formel (2.3) gilt für die verlustlose Leitung bei der R0 = 0 und G0 = 0 sind. Ist dies nicht der Fall, so wird die so genannte Wellenimpedanz der Leitung angegeben, welche das elektrische Verhalten der Leitung bei Wechselstrom im eingeschwungenen Zustand beschreibt. Mit der Wellenimpedanz werden die durch R0 und G0 bedingten Dissipations- und Isolations-Verluste der Leitung berücksichtigt. 2.2 Reflexion und Leitungsanpassung Eine elektromagnetische Welle, bzw. ein elektrisches Signal „sieht“ den Wellenwiderstand. Diese Erkenntnis liefert uns den Schlüssel zur wirksamen Unterdrückung von Reflexionen. Wenn am Ende einer Leitung ein Widerstand mit dem Wert des Wellenwiderstands montiert wird, so wird der ankommenden Welle ein „unendlich langes Kabel vorgetäuscht“. Sie läuft also in diesen Abschlusswiderstand und wird dort reflexionslos absorbiert, d. h. ihre Energie wird dabei vollständig am Abschlusswiderstand abgegeben. In diesem Fall spricht man von Anpassung. Diese Massnahme funktioniert aber nur bei Leitungen ohne Abzweigungen. Bei Abzweigungen „sieht“ die Welle die Parallelschaltung der Wellenwiderstände der beiden Leitungen, also einen veränderten Wert der zu Reflexionen führt. Falls jedoch abzweigende Leitungen, sogenannte Stichleitungen, sehr viel kürzer als die Wellenlänge des Signals sind, dann „übersieht“ die vorbeilaufende Welle diese Verzweigung. In der Praxis zeigt es sich, dass Stichleitungen bis zu 2 m Länge meist tolerierbar sind. Aus Belastungsgründen kann in der Regel nicht jedes Teilstück eines Netzwerkes durch einen Widerstand für sich abgeschlossen werden. Man plaziert sie deshalb mit Vorteil am Anfang und am Ende des längsten Strangs. An den Verzweigungsstellen 6 2 Leitungen und den Enden der Seitenäste entstehen dann natürlich weiterhin Reflexionen, diese werden aber spätestens am Ende des Hauptstrangs wieder „verschluckt“. Aus diesem Grund weisen die Signalquellen am Leitungsanfang ebenfalls einen Innenwiderstand mit dem Wert des Wellenwiderstand des Leiters auf, damit „zurücklaufende“ Wellen in der Quelle „geschluckt“ werden. Bei beliebigen Abschlusswiderständen R und Wellenwiderständen Rw ergibt sich für das Verhältnis der Spannung ur der reflektierten zur Spannung ue der einlaufenden Welle: r= ir R − Rw ur =− = ue ie R + Rw (2.4) Dieses Verhältnis wird Reflexionsfaktor genannt. Bei Anpassung erhält der Reflexionsfaktor den Wert r = 0. Das heisst es entsteht keine reflektierte Welle (ur = 0 und ir = 0). Bei Leerlauf am Leitungsende wird eine einlaufende Welle vollständig reflektiert, da keine Energie abgegeben werden kann. Der Reflexionsfaktor beträgt in diesem Fall r = 1. Dabei bleibt die Spannung der reflektierten Welle erhalten und die Stromstärke ändert ihr Vorzeichen. Während des Reflexionsprozesses überlagert sich die einlaufende mit der reflektierten Welle additiv, so dass die resultierende Spannung am Leitungsende verdoppelt wird (u = ue + ur = 2ue ) und die resultierende Stromstärke verschwindet (i = ie + ir = 0). Bei Kurzschluss am Leitungsende wird eine einlaufende Welle ebenfalls vollständig reflektiert, da auch in diesem Fall keine Energie abgegeben werden kann. Der Reflexionsfaktor beträgt in diesem Fall r = −1. Dabei ändert am Leitungsende die Spannung der reflektierten Welle ihr Vorzeichen und die Stromstärke bleibt erhalten. Während des Reflexionsprozesses überlagert sich die einlaufende mit der reflektierten Welle, so dass die resultierende Spannung am Leitungsende verschwindet (u = ue + ur = 0) und die resultierende Stromstärke doppelt so gross wird (i = ie + ir = 2ie ). 7 3 Wellenleiter, Antennen und Freiraumausbreitung Zur Freiraumausbreitung bedarf es keinerlei Träger für die elektromagnetischen Wellen, diese können sich also im Vakuum ausbreiten. Mittels Wellenleitern können elektromagnetische Wellen geführt werden. Zur Erzeugung (Abstrahlen) und zum Einfangen dieser Wellen braucht es Antennen, welche die Nahtstellen zwischen den Leitungen und den leitungsfreien Ausbreitungskanälen bilden. 3.1 Elektromagnetische Wellen Gemäss den Maxwell’schen Gleichungen1 kann sich eine elektromagnetische Welle im Vakuum ausbreiten, cf. Abbildung 3.1. Diese besteht aus einem zeitlich veränderlichen elektrischen E(t) und einem zeitlich veränderlichen magnetischen Feld B(t) die sich als Verschiebungsströme und entsprechend dem Durchflutungs- und dem Induktionsgesetz gegenseitig beeinflussen. Die elektromagnetische TEM-Welle (transversale elektromagnetische Welle) ist durch folgende Eigenschaften gekennzeichnet: • Die Feldvektoren der elektrischen Feldstärke 2 E und der magnetischen Flussdichte 3 B (beziehungsweise der magnetischen Feldstärke 4 H), stehen dabei senkrecht zur Ausbreitungsrichtung. Die E-Vektoren stehen dabei senkrecht auf den B-Vektoren. Die Bezeichnung TEM-Wellen kommt daher, dass diese keine Feldkomponenten in z-Richtung aufweisen. • Die Ebene der E-Vektoren wird als Polarisationsebene bezeichnet (cf. Abbildung 3.1). • Die Ausbreitungsgeschwindigkeit der Welle beträgt v = √ 1 µ0 µr 0 r √ 1 c. Im Vakuum µr r ≈ 3 · 108 m/s. = mit µr = 1 und r = 1 ergibt sich dabei die Lichtgeschwindigkeit c q q q q µ0 µr µr µr µr E E V • Das Verhältnis Zw = µ0 µr B = H = 0 r = π120 A r = Z0 r ≈ 377 Ω r entspricht der Wellenimpedanz (Wellenwiderstand) welche die elektromagnetische Welle E = µE = µ10 Z0 = √µ10 0 = c. „fühlt“. Im Vakuum ergibt sich somit für das Verhältnis B 0H • Die Energiestromdichte (Energiestrom pro Flächeneinheit) einer elektromagnetischen Welle lässt sich mit dem Poynting’schen Vektor angeben: S=E×H (3.1) Die Einheit von S ist: [S] = V A m−2 = W m−2 . Diese Grösse beschreibt die instantane Intensität einer elektromagnetischen Welle. 1 2 3 4 James Clerk Maxwell (1831 - 1879) publizierte in 1864 die vollständige Theorie des Elektromagnetismus. Die elektrische Feldstärke beschreibt die Richtung und die Stärke des elektrischen Felds. Die magnetische Flussdichte oder Induktion beschreibt die Richtung und die Stärke des magnetischen Felds. Die magnetische Feldstärke beschreibt nicht die Stärke des magnetischen Felds, ist aber im Vakuum bis auf eine Proportionalitätskonstante identisch mit der magnetischen Flussdichte: B = µ0 H. 8 3 Wellenleiter, Antennen und Freiraumausbreitung Abbildung 3.1: Momentaufnahme einer ebenen, vertikal polarisierten, elektromagnetischen TEM-Welle im homogenen, isotropen und verlustfreien, nichtleitenden Medium Bei einer TEM-Welle sind die Vektoren der elektrischen Feldstärke und magnetischen Flussdichte senkrecht zur Ausbreitungsrichtung. Sie weisen also keine z-Komponente auf. Die y-Achse entspricht der Richtung der Vektoren der elektrischen Feldstärke E, die x-Achse entspricht der Richtung der Vektoren der magnetischen Flussdichte B beziehungsweise der magnetischen Feldstärke H. Die Ebene in der sich die E-Feldvektoren befinden (yz-Ebene) wird als Polarisationsebene bezeichnet. 9 3 Wellenleiter, Antennen und Freiraumausbreitung • Wie zu jedem Energiestrom, gehört auch zum elektromagnetischen Energiestrom eine Impulsdichte (Impuls pro Volumeneinheit): p= 1 S c2 (3.2) Die Einheit von p ist: [p] = N s m−3 . Die elektromagnetische Welle besitzt einen Impuls! Das Umlenken eines Lichtstrahls mit einem Spiegel erzeugt also einen Rückstoss auf diesen Spiegel. • Die elektromagnetische Welle besitzt die Energiedichte (Energie pro Volumeneinheit): w= 0 2 1 2 1 2 B = 0 E 2 = B E + 2 2µ0 µ0 (3.3) Die Energie wird je zur Hälfte durch das elektrische und das magnetische Feld getragen! 3.2 Wellenleiter In vielen Mikrowellensystemen werden bei Frequenzen über 1 GHz zur Übertragung von hohen Leistungen (bis zu einigen MW) und über kürzere Distanzen metallische Hohlleiter eingesetzt5 . Hohlleiter sind im Allgemeinen zylindrisch mit rechteckigem oder rundem Querschnitt. Die Funktionsweise eines Rechteckhohlleiters lässt sich intuitiv erfassen und ist in Abbildung 3.3 illustriert: Die Welle im Hohlleiter kann verstanden werden, als eine Überlagerung (Superpo- Abbildung 3.2: Hohlleiter mit Feldlinien der TE-Welle Bei der TE-Welle oder H-Welle besitzt nur das magnetische Feld Komponenten in z-Richtung. Die E-Feldlininen sind parallel zur y-Achse und die B- oder HFeldlininen bilden geschlossene Kurven in den Ebenen parallel zur xz-Ebene. sition) von zwei Teilwellen, welche beide unter dem Ausbreitungswinkel6 ψ einander auf einem 5 6 Für (leistungsarme) Übertragungen über weitere Distanzen werden heute Lichtwellenleiter, beziehungsweise dielektrische Fasern benutzt auf die hier nicht eingegangen werden soll. Dieser Winkel entspricht der Ausbreitungsrichtung der Teilwellen gegenüber der Richtung des Hohlleiters (z-Achse). 10 3 Wellenleiter, Antennen und Freiraumausbreitung Abbildung 3.3: Ausbreitung der TE-Welle im Hohlleiter Eine elektromagnetische Teilwelle breitet sich mit Lichtgeschwindigkeit (in Luft) unter dem Ausbreitungswinkel ψ aus (Richtung von λ0 ) und wird an der „oberen“ Wand unter dem selben Winkel reflektiert. Simultan breitet sich eine zweite (nicht dargestellte) Teilwelle spiegelbildlich (bezüglich der eingezeichneten z-Achse) zur ersten Teilwelle aus und wird an der „unteren“ Wand reflektiert. Die Überlagerung dieser beiden Teilwellen führt zu einer Wellenfront im Leiter in der z-Richtung mit der bezüglich λ0 grösseren Wellenlänge λ. Zickzack-Kurs mit der Lichtgeschwindigkeit c entgegenlaufen. Die Ausbreitungsgeschwindigkeit oder Gruppengeschwindigkeit des durch Superposition der beiden Teilwellen resultierenden Wellenpakets im Leiter ist um den Faktor cos ψ kleiner als die Ausbreitungsgeschwindigkeit c der einzelnen Teilwellen: vg = c cos ψ Die Wellenlänge λ der resultierenden Welle ist daher um den Faktor cos1 ψ grösser als die Wellenlänge λ0 der Teilwellen: λ0 λ= cos ψ Bei einer gegebenen Hohlleiterbreite a wird der Winkel ψ mit abnehmender Frequenz grösser. Beträgt die Freiraumwellenlänge λ0 = 2a, so wird ψ = π2 (ohne Herleitung). In diesem Grenzfall wandern die Teilwellen zwischen den Hohlleiterwänden hin und her ohne Ausbreitungskomponente in z-Richtung. Die grösste in einem Hohlleiter übertragbare Freiraumwellenlänge, Grenzwellenlänge genannt, beträgt somit: λc = 2a Damit beträgt die minimale übertragbare Frequenz (cut-off frequncy): fc = c c = λc 2a Mit der Definition der normierten Wellenlänge ν: ν= fc λ0 = = sin ψ f λc lässt sich für die Wellenlänge λ im Hohlleiter schreiben λ= √ λ0 1 − ν2 11 3 Wellenleiter, Antennen und Freiraumausbreitung Die räumlich-zeitliche Ausbreitung des elektrischen Wechselfeldes in z-Richtung E(x, y, z, t) im TE10 -Modus7 , kann allgemein durch folgende Formel beschrieben werden: E(x, y, z, t) = E(x, y) cos 2π 2π t− z = E(x, y) cos ωt − βz T λ (3.4) Dabei sind T die Periodendauer, λ die Wellenlänge, ω die Kreisfrequenz und β = 2π λ = √ 2π 2 der so genannte Phasenbelag. Das Verhältnis ω = λ entspricht der Gruppenge1 − ν λ0 β T schwindigkeit vg . Wird die Feldstärke an einer bestimmten Stelle betrachtet (z fest), so bedeutet der Ausdruck βz aus der Beziehung (3.4) ein frequenzabhängiger Phasenwinkel. Ein Hohlleiter ist demzufolge dispersiv, die Phase der Welle ist nicht mehr proportional zur Frequenz, was zu frequenzabhängigen Signallaufzeiten führt. 3.3 Antennen Antennen bilden die Nahtstelle zwischen Leitung und Raum zur Abstrahlung oder zum Einfangen elektromagnetischer Strahlung8 . Ein wesentliches Merkmal einer Antenne ist der so genannte Antennengewinn G. Dieser gibt an, um welchen Faktor die Antenne, bei gleicher zugefügter Leistung, mehr Leistung in die Hauptstrahlrichtung, d. h. in einen bestimmten Raumwinkel abgibt, als ein isotroper Stahler9 in diesen Raumwinkel sendet. Der Antennengewinn wird im Allgemeinen in dB angegeben: GdB = 10 log G. Gelegentlich wird der Gewinn in dBi angegeben, um hervorzuheben, dass der Antennengewinn bezüglich einem isotropen Strahler zu verstehen ist10 . Es gilt (δ ist dabei der Strahlöffnungswinkel (Strahlbreite), d. h. δ 2 entspricht dem Raumwinkel in den die Antenne abstrahlt): G= 4π δ2 (3.5) Der Antennengewinn hängt ausserdem von der effektiven Antennenfläche Ae und der Wellenlänge λ der elektromagnetischen Strahlung wie folgt ab: G= 4πAe λ2 (3.6) Die effektive Antennenfläche ist nicht identisch mit der geometrischen Abmessung der Antenne, auch wenn im Allgemeinen ein Zusammenhang besteht. Bei Antennen mit grosser Richtwirkung (z. B. Parabolantennen) ist die effektive Antennenfläche etwa 23 der geometrischen Antennenfläche. Bemerkung: In diesen Betrachtungen ist die Dämpfung der Antennenanschlüsse (Kabel) nicht enthalten. 7 8 9 10 Da das E-Feld quer zur Ausbreitungsrichtung (z-Richtung) steht, wird dieser Ausbreitungsmodus TE10 (transversal electrical mode) oder H10 -Modus genannt, letzteres in Anlehnung an die Tatsache, dass das magnetische Feld bei dieser Ausbreitungsart Komponenten in Ausbreitungsrichtung aufweist. Die Indizes bedeuten: „1“ Maximum des elektrischen Felds in x-Richtung und „0“, d h. kein Maximum in y-Richtung. Eine kompakte Einführung zu diesem Thema befindet sich in ?, Abschnitt 5.5.1. Ein isotroper Strahler oder fiktiver Rundstrahler, sendet die elektromagnetische Leistung gleichmässig über den gesamten Raumwinkel 4π verteilt. Eine weitere Möglichkeit besteht darin, den Antennengewinn bezüglich einer Dipolantenne anzugeben, welche nicht isotrop in den ganzen Raum strahlt. In diesem Fall wird der Gewinn in dBd (d wie Dipol) angegeben 12 3 Wellenleiter, Antennen und Freiraumausbreitung 3.4 Freiraumausbreitung 3.4.1 Freitraum- und Streckendämpfung Die Freiraumdämpfung AF zwischen zwei isotropen Strahlern im Abstand D beträgt (Psi ist die Sende- und Pei die Empfangsleistung): Psi = AF = Pei 2 D 2 4π 4π = fD λ c (3.7) Dies ergibt für die Streckendämpfung A von Sende- zu Empfangsantenne (Gs und Ge sind die Antennengewinne der Sende-, bzw. der Empfangsantenne): AF 1 Ps = = A= Pe Gs G e Gs Ge D 4π λ 2 (3.8) und in dB ausgedrückt: AdB = 32.44 dB + 20 log f(MHz) + 20 log D(km) − GsdB − GedB (3.9) Die Freiraumausbreitung elektromagnetischer Wellen, wie sie durch die Beziehung (3.7) formuliert ist, gilt insbesondere im Weltraum. 3.4.2 Physikalische Effekte bei der Wellenausbreitung Auf ihrem Ausbreitungspfad können elektromagnetische Wellen durch die Eigenschaften der Atmosphäre beeinflusst, sowie durch diverse „Hindernisse“ um- oder abgelenkt werden. Dafür sind folgende physikalische Phänomene verantwortlich (cf. Abbildung 3.4): Abbildung 3.4: Physikalische Effekte bei der Wellenausbreitung 13 3 Wellenleiter, Antennen und Freiraumausbreitung • Absorption: In der Erdatmosphäre wird die Welle gedämpft, d. h. ein Teil der Feldenergie der Welle wird dissipiert11 . Diese Dämpfung (attenuation) hängt von der Frequenz, beziehungsweise von der Wellenlänge des Signals und der atmosphärischen Bedingungen, wie Regen und Schneefall ab: Wasser- (H2 O) und Sauerstoffmoleküle (O2 ) weisen Resonanzen auf, welche die elektromagnetischen Wellen teilweise absorbieren (cf. Abbildung 3.5). Für kurze Strecken, wie z. B. beim Mobilfunk (GSM: 900 MHz, 1800 MHz, UMTS: 2 GHz), und allgemein für Frequenzen unterhalb 20 GHz ist die atmosphärische Dämpfung vernachlässigbar klein, so dass für diesen Fall die Freiraumdämpfung gilt. Für höhere Frequenzen kann die atmosphärische Absorption hohe Dämpfungswerte annehmen. Abbildung 3.5: Atmosphärische Dämpfung in Funktion der Frequenz Die wichtigsten Absorptionslinien sind bei den folgenden Resonanzfrequenzen: O2 : 60 / 118.75 GHz H2 O: 22.235 / 183.31 / 325.153 GHz (This figure is licensed under the Creative Commons Attribution ShareAlike 2.5 License.) • Brechnung (refraction): An der Grenzfläche zweier Medien kann es zu einer Änderung der Ausbreitungsrichtung der elektromagnetischen Welle kommen, wenn diese Medien verschiedene Brechungsindizes12 aufweisen. Der Brechungsindex der Luft z. B., nimmt mit der Luftdichte ab und somit auch mit der Höhe über dem Meeresspiegel. Ferner 11 12 d. h. in Wärmeernergie umgesetzt. Der Brechungsindex eines Mediums ist ein Mass für die Ausbreitungsgeschwindigkeit der elektromagnetischen Welle in diesem Medium. 14 3 Wellenleiter, Antennen und Freiraumausbreitung besitzt die Ionosphäre13 eigene Brechungsindizes, so dass Mittel- und Kurzwellen an der Ionosphäre zurück zur Erde umgelenkt werden können. Für höhere Frequenzen ist die Ionosphäre „durchlässig“. Abbildung 3.6: Aufbau der Ionosphäre in Abhängigkeit von der Jahres- und Tageszeit (Diese Figur wurde unter der GNU-Lizenz für freie Dokumentation veröffentlicht.) • Beugung (diffraction): Wenn eine elektromagnetische Welle14 auf eine „scharfe“ Kante eines Hindernisses trifft, kann sie in den „Schattenbereich“ des Hindernis abgelenkt werden. Der Effekt ist umso stärker, je grösser die Wellenlänge der Welle ist. Damit ist es möglich um „Ecken“ herum zu senden. 13 14 Die Ionosphäre besteht aus durch die Sonneneinstrahlung erzeugten Schichten ionisierter Atome und Mole+ + küle (O+ , O+ 2 , N2 , NO ). Da letztere verschiedene Ionisirungsernergien aufweisen, besteht die Ionosphäre aus verschiedenen Schichten: D-Schicht (Höhe: 70 · · · 90 km), E-Schicht (Höhe: 110 · · · 130 km), F1-Schicht (Höhe: ca. 200 km), F2-Schicht (Höhe: 250 · · · 400 km). Da die Ionisation durch die Intensität der Sonneneinstrahlung bedingt ist, schwankt der Ionisationsgrad mit dem Tages- und Nachtzyklus (in der Nacht existieren nur noch die beiden verschmolzenen F-Schichten) und hängt ausserdem von der Sonnenaktivität ab; siehe z. B.: http://de.wikipedia.org/wiki/Ionosph%C3%A4re; cf. Abbildung 3.6 für eine Darstellung der Schichten der Ionosphäre. Der Effekt ist insbesondere bei akustischen Wellen feststellbar. 15 3 Wellenleiter, Antennen und Freiraumausbreitung • Reflexion und Streuung (reflection and dispersion or scattering): Stossen elektromagnetische Wellen auf ein ebenes Hindernis, dessen Abmessungen viel grösser als die Wellenlänge der Welle sind, so wird diese reflektiert („gespiegelt“) und falls das Hindernis nicht eben ist, in verschiedene Richtungen gestreut. Bemerkung: Die Phänomene Brechung, Beugung, Reflexion und Streuung führen im Allgemeinen zu Mehrwegausbreitung (multipath propagation) der elektromagnetischen Wellen, bei welcher der Empfänger das selbe Signal über verschieden lange Wege erhält. Die zeitliche Verschiebung zwischen den Signalen mit verschiedenen Laufzeiten (Phasenverschiebung) führt zu Interferenzen. Dabei ergeben sich Orte, wo sich die Wellen verstärken und Orte bei denen sie sich auslöschen (small scale fading). Bei der Brechung an den Schichten der Ionosphäre können die Interferenzen auch zeitlich schwanken, ohne dass dabei der Empfänger verschoben wird (fading). 16