Zu den Keplerschen Gesetzen. Herausragende Beiträge großer
Werbung

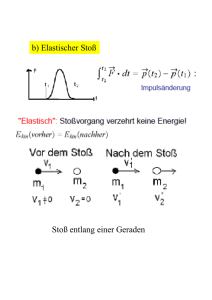
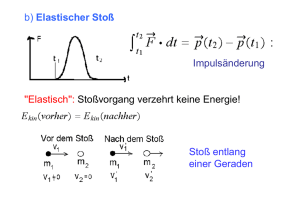
D.Michel Vorlesung Experimentalphysik, Teil 1: Mechanik Zu den Keplerschen Gesetzen. Herausragende Beiträge großer Gelehrter dieser Zeit Nikolaus Kopernikus (*1473 Torun, +1543 Frombork) „De revolutionibus orbium coelestium“ (6 Bde., 1543) (Über die Kreisbewegungen der Weltkörper) Kopernikanisches System Giordano Bruno (*1548 Nola, +1600 Rom [verbrannt auf Scheiterhaufen]) „Del infino, universo e mondi“ (1585) (Über das Unendliche, das Weltall und die Welten) Galileo Galilei (*1564 Pisa, + 1642 bei Florenz) „Sidereus nuncius“ (1610) (Der Sternenbote) Astronomische Beobachtungen mit einem (Galileischen) Fernrohr 1616: Offizielle Warnung, das kopernikanische System zu verbreiten „Dialogo“ (1632) (Der Dialogo) Anlaß für Galilei-Prozeß 1633, Widerruf seiner Lehre 1633, Rehabilitation durch die römische Kurie 1993 Johannes Kepler (*1571 Weil/Württ., +1630 Regensburg) „Astronomia nova aitiologethos seu physica coelestis“ (1610) (Neue Astronomie [mit] logischer Erklärung [über die] Physik des Himmels) „Harmonices mundi libri V “ (1619) (Fünf Bücher der Harmonie der Welt) αρµονιχησ (griech., Genitiv von αρµονιχη) 3 Keplersche Gesetze „Harmonie der Töne, Sphärenmusik“: Quotienten der gemessenen Winkelgeschwindigkeiten in Sonnennähe (Perihel) und Sonnenferne (Aphel) für Erde Mars Saturn 16/15 3/2 5/4 (großer Halbton) (Quinte) (Terz) Basis: Genaue Messungen durch Tycho de Brahe (*1546 Knudstrup auf Schonen (Dän.), +1601 Prag) D.Michel Vorlesung Experimentalphysik, Teil 1: Mechanik Newtonsche Axiome 1. Trägheitsprinzip Ein kräftefreier Körper verharrt in Ruhe oder in geradlinig gleichförmiger Bewegung, solange keine Kraft auf ihn wirkt (Galileisches Trägheitsprinzip). 2. Aktionsprinzip Wenn eine Kraft F auf einen Körper wirkt, verändert sich die Bewegungsgröße (Impuls, p = mv) so, daß gilt d/dt (mv) = F. 3. Reaktionsprinzip actio = reactio Wenn eine Kraft F, die auf einen Körper wirkt, ihren Ursprung in einen anderen Körper hat, so wirkt auf diesen die entgegengesetzt gleiche Kraft. Ergänzung: Die Größen p und F sind gerichtete Größen (Vektoren), die durch diese Gleichungen definiert sind. Die Masse m ist eine skalare (nicht gerichtete) Größe, die im allgemeinen von der Geschwindigkeit abhängen kann (A. Einstein, 1905): m = mo /(1 - v2/c2 )1/2 , mo = Ruhemasse, c = Lichtgeschwindigkeit im Vakuum. Im folgenden wird nur der nichtrelativistische Fall einer konstanten Masse betrachtet, d. h. m = mo . Basisgrößenarten, Systeme Internationale d’ Unités (SI) Formelzeichen Länge Zeit Masse l t m Basiseinheiten das Meter (m) die Sekunde (s) das Kilogramm (kg) -----------------------------------------------------El. Stromstärke Temperatur (Kelvin) Stoffmenge Lichtstärke I T n lV das Ampere (A) das Kelvin (K) das Mol (mol) die Candela (cd) Abgeleitete Größenarten Dimension Fläche (Volumen) Geschwindigkeit = Weg/Zeit Beschleunigung = Geschwindigkeit/Zeit Kraft = Masse à Beschleunigung Arbeit = Kraft à Weg [= Energie] Leistung = Arbeit/Zeit Dichte = Masse/Volumen Frequenz = Zahl der Schwingungen/Zeit usw. l2(l3) lt-1 lt-2 mlt-2 ml2t-2 ml2t-3 ml-3 s-1 Dezimale Vielfache und Teile von SI-Einheiten Vorsilbe Exa Peta Tera Giga Mega Kilo Hekto Deka Dezi Zenti Milli Mikro Nano Pico Femto Atto Abkürzung E P T G M k h da d c m µ n p f a Zehnerpotenz 1018 1015 1012 109 106 103 102 101 10-1 10-2 10-3 10-6 10-9 10-12 10-15 10-18 SI-fremde Einheiten: 1 mile (mi) [GB, USA, u.a.] 1 yard (yd) [GB] 1 foot (ft) 1 inch (in) 1 Ångström (Å) 1 X-Einheit (XE) 1 Lichtjahr (ly) = 1760 yd = 0,9144 m = 0,3048 m = Zoll (″) = 10-10 m = 1,00202 · 10-13 m = 9,4605 · 1015 m = 1609,344 m = 3 ft = 12 in = 0,0254 m = 100 pm Umrechnung von Zeiteinheiten 1 Tag (d) 1h 1 Jahr (a) = 24 Stunden (h) = 60 min = 365 d = 1440 Minuten (min) = 3600 s = 3,1536 · 107 s = 86400 s SI-fremde (englisch-amerikanische) Masse-Einheiten 1 pound (lb; USA, GB, etc.) 1 ounce (oz; USA, GB, etc.) = 0,4536 kg = 0,02835 kg = 16 oz D. Michel Vorlesung Exp.-Physik, Teil 1: Mechanik Wichtige Definitionen zur Kinematik von Punktmassen dv dx ( Beschleunigung), v: = ( Geschwindigkeit), x = x( t) ( Weg): dt dt a( t) = v( t) = ( x t) a: = Darstellung der Zusammenhänge für geradlinige, gleichförmig beschleunigte Bewegung Beschleunigung a = a0= konstant a(t) Mathematik Lösung der „Differentialgleichung“ a0 a( t) = a0(t-t0) t0 t Zeit Geschwindigkeit: v(t) - v0: Fläche unter a(t)-Kurve von t0 bis t (hier t0 = 0) dv( t) = a0 durch Trennung dt der Variablen: dv = a0dt „Integration“ auf beiden Seiten: v t v0 t0 ∫ dv = a 0 ∫ dt → v( t ) − v 0 = a 0 ⋅ t v( t ) = v 0 + a 0 (t − t 0 ) v( t ) = v 0 + a 0 t , t = 0 Geschwindigkeit v(t) Mathematik Lösung der „Differentialgleichung“ A2 = 1 a0 (t − t 0 )2 2 v0 dx( t ) = v0 + a 0 ⋅ t dt dx = (v 0 + a 0 t )dt v( t ) = A1 = v0(t-t0) t0 t Zeit x t t x0 t0 =0 t0 =0 ∫ dx = x − x 0 = ∫ v 0dt + a 0 ∫ tdt Weg: x(t) - x0 1 x( t ) = x 0 + v 0 t + a 0 t 2 , t 0 = 0 2 X(t) ist gleich der Fläche A unter v(t)-Kurve von t0 bis t: A = A1 + A2 (hier t0 = 0) D. Michel Vorlesung Exp.-Physik, Teil 1: Mechanik Grundzüge der Vektoralgebra Vektoraddition: & a = ( a1, a2, a3) & & a + b = ( a1 + b1, a2 + b2, a3 + b3) & b = ( b1, b2 , b3) Subtraktion: & a & & a − b = ( a1 − b1, a2 − b2, a3 − b3) & b Skalarprodukt: & a α a cosα & & ⇒ Projektion von a auf Richtung von b & b & & a ⋅ b = a ⋅ b cosα = ( a1b1 + a2b2 + a3b3) Vektorprodukt: & c & & & & & & & c = a × b, c ⊥ a, c ⊥b & b & a = ( a2b3 − a3b2, a3b1 − a1b3, a1b2 − a2b1) & & & & & c = a × b = a ⋅ b ⋅ sin α α Distributivgesetz & & & & & & & a ⋅ ( b + c) = a ⋅ b + a ⋅ c Betrag eines Vektors & & & & a 2 = a ⋅ a = a12 + a22 + a32, a = a = a12 + a22 + a32 Richtung eines Vektors, Einheitsvektor & a 1 & ea = = ( a1, a2, a3) a a Def. der Richtungskosinus: ai = cosα i a & & Def . von v( t) und a( t) Komponentenweise Differentiation des Ortsvektors: & &der Komponenten & & & & & r( t) = (x( t), y( t), z( t)) = x( t) i + y( t) j + z( t) k , da Einheitsvektoren i , j, k des Bezugssystems zeitlich unveränderlich sind. D. Michel Vorlesung Experimentalphysik Teil 1, Mechanik Arten von Kräften Ziel: Erweiterung der früheren Betrachtungen, wobei nur nach der relativen Stärke und der Art der Wechselwirkungen klassifiziert worden war. Die nachfolgende Unterscheidung geschieht danach, ob es sich um „reale“ Kräfte handelt, die man mit Objekten in der Umgebung eines Teilchens in Verbindung bringen kann (Nahewirkungskräfte und Fernkräfte), oder ob es sogenannte „Scheinkräfte“ (Trägheitskräfte) sind Einteilung: 1. Nahewirkungskräfte Direkte Kontaktwechselwirkung zwischen Körpern (Druck, Zug, Stoß, usw.) Beispiel: Reibungskräfte 2. Kräfte, bei denen sich keine Kontaktwechselwirkung nachweisen läßt (Fernkräfte) 2.1. Trägheitskräfte (Scheinkräfte) Trägheitskräfte, die dadurch entstehen, daß man den Vorgang in einem bestimmten Bezugssystem beschreibt und die in einem anderen Bezugssystem nicht vorhanden wären. Ihre Bezeichnung als Scheinkräfte ergibt sich daraus, daß sie sich aus der beschleunigten Bewegung des Bezugssystems ergeben. In diesem Fall stimmt die resultierende Kraft nicht mit dem Produkt aus Masse und gemessener Beschleunigung überein: Wenn wir das 2. Newtonsche Gesetz F = d(mv)/dt) = a in einem beschleunigten Bezugssystem anwenden wollen , müssen wir fiktive Kräfte oder Scheinkräfte einführen, die von der Beschleunigung des Bezugssystems abhängen. Diese Scheinkräfte dienen als ein Hilfsmittel, damit die Beziehung F = d(mv)/dt) auch in einem Nicht-Inertialsystem gilt. Dem Beobachter im Nicht-Inertialsystem erscheinen diese Kräfte ebenso real wie alle anderen Kräfte. 2.2. Kräfte, die sich nicht durch Änderung des Bezugssystems beseitigen lassen Reale Fernkräfte Nebenbemerkung: Schwierige Situation bei Gravitationskräften: Es gibt (komplizierte) Transformationen des Bezugssystems, wonach die Gravitationskräfte zum Verschwinden gebracht werden können (A. Einstein). Demgemäß könnten auch sie den Trägheitskräften zugeordnet werden. Dies ist eine offene Frage. & 1. Beispiel: Freier Fall aus Höhe h = h´ in Σ´ mit v′ (t = 0) = 0 g Σ ′: x ′ = y ′ = 0, z ′ = h ′ − t 2 2 Gerade entlang z´-Richtung Σ: g x = v R t , y = 0, z = h − t 2 2 Bahnkurve ist Parabel (s. Kapitel 1) 2. Beispiel: Nichtzentraler Stoß im Schwerpunktsystem Σ´, das sich relativ & & zum Laborsystem Σ mit Geschwindigkeit v R = v S bewegt: & & & v ′ = v − v S (zwei Massen m1, m2) & & & & Impulse: p 1v = m1v v 1 , p 2 v = m 2 v v 2 & & & & Impulse: p 1v = m1v u 1 , p 2 v = m 2 v u 2 Σ: vor Stoß: nach Stoß: & & v1 , v 2 & & u1 , u 2 Σ´: vor Stoß: nach Stoß: & & & & v ′ = v i − v s Impulse: p iv i = 1, 2 & & & & u ′ = u i − u s Impulse: p iu Definition Schwerpunkt & & & & m1 v1 + m 2 v 2 & m1 r1 + m 2 r2 & rs = , vs = m1 + m 2 m1 + m 2 & & & Anwendung der Transformation v ′i = v i − v s & & & v 1′ = v1 − v s = m2 & & (v1 − v 2 ) m1 + m 2 m1 & & & & & v1′ = v 2 − v s = (v 2 − v1 ) m1 + m 2 & & & p1′ v = m1 v 1′ = − p ′2 v & & p1′ v + p ′2 v = 0 Impulserhaltungssatz im Schwerpunktsystem Σ´ & & & & p1′ v + p′2 v = 0 = p1′ u + p ′2 u vor Stoß d. h. & & p 1′ v = p ′2 v = p ′v nach Stoß & & p1′ u = p ′2 u = p ′u Energieerhaltung (elastischer Stoß) & p1′ v 2 2 m1 + & p ′2 v 2 2m2 p ′v2 = 2 1 1 p ′u2 1 1 + + = 2 m1 m 2 m1 m 2 d. h. p ′v = p ′u Schlußfolgerung für elastischen Stoß Die Beträge aller Impulse bezüglich Σ´ sind vor und nach dem Stoß gleich, d. h. sie liegen auf einem Kreis. Der Ablenkwinkel θ hängt in komplizierter Weise ab von den Massen und dem Stoßparameter (hier nicht näher ausführbar). & p′2 u & p′2 v θ/2 θ/2 & p1′ v & p1′ u Ergänzung zum Abschnitt 4.5.3.1. Elastische Stöße Nichtzentraler Stoß im Schwerpunktsystem Wir wählen ein Koordinatensystem, das fest mit dem Schwerpunkt S verbunden ist. Da sich der Schwerpunkt geradlinig gleichförmig bewegt (vgl. Kap. 4.4.3.), & & & d. h. da gilt mrS = 0 und damit mrS = mv S = const. , wirken in diesem System die gleichen Gesetze wie im ortsfesten Koordinatensystem. Im Schwerpunktsystem gilt: & & & & & & & mrS = m1r1 + m2 r2 ⇒ m1 (r1 − rS ) + m2 (r2 − rS ) = 0 & & & & & & & mv S = m1v1 + m2 v 2 ⇒ m1 (r1 − v S ) + m2 (r2 − rS ) = 0 v1 S v2 S & mrS = 0. Damit ergibt sich für den Stoß zweier Massen im Schwerpunktsystem S: & & m1v1S + m2 v2 S = 0 = (vor dem Stoß) & & m1u1S + m2 u2 S (nach dem Stoß) & & v is , u is (i =1, 2) sind die Geschwindigkeiten im S-System. & & & & Aus m1v1S = − m2 v2 S und m1u1S = −m2 u2 S folgt nun: & & m v1S = m1v1S = m2 v 2 S = p( vor ) und m u1s = m1u1S = m2 u2 S = p( nach ) . Aus dem Energiesatz ergibt sich: E kin & p( vor ) p(2vor ) 1 m12 v12S m22 v22S 1 = + = + 2m1 2m2 2 m1 m2 p(2nach ) 1 m12 u12S m12 u22S 1 = + = + , d . h. 2m1 2m2 2 m1 m2 & = p( nach ) = p Im Schwerpunktsystem liegen also die Impulse so, daß ihre Beträge ein gleichschenkliches Dreieck mit den Seitenlängen p, p und ∆p und dem eingeschlossenen Winkel θ bilden: & m2 u 2S p & m2 v 2S & & p = p( vor ) = p( nach ) θ & ∆p & m1v1S & m1u1S p & & & θ ∆p = ∆p = p( nach ) − p( vor ) = 2 p sin . 2 Zentraler Stoß: θ = π, ∆p = 2p & ∆p & & & ∆p = p( nach ) − p( vor ) = ∆p Impulsänderung im S-System Zur Beschreibung der Drehbewegung & dϕ : & Vektor in Richtung der Drehachse mit Drehwinkel als Betrag dϕ = dϕ & dϕ Drehachse & dr dϕ dϕ & dr = r sinθ ⋅ dϕ r ⋅ sinθ & & r + dr Vektorschreibweise: & r & & & dr = [dϕ × r ] 0 Nach Division mit dt: & & dr & dϕ & & & = v = × r = [ω × r ], dt dt & dϕ & =ω dt & & senkrecht auf Ebene, die durch dr steht r & und dϕ aufgespannt wird. Analogien zwischen der Behandlung von Translation und Rotation Translation Rotation & Ortsvektor r ( t ) Lage: Geschwindigkeit: Beschleunigung: Winkelgeschwindigkeit: & & ω = ϕ & & & a = v = r Winkelbeschleunigung: & & ω = ϕ & & p = mv Impuls: & & ( p und v parallel) & F Kraft: Bewegungsgleichung: Impulserhaltung: & & bei F = 0 = ∑ Fiäuß i & ∑ Fiäuß sind äußere Kräfte i und & & v = r m Masse: Orientierung: Drehachse & Drehwinkel ϕ( t ) & & p = F & p = 0 Ikl Trägheitsmoment: (i. allg. 6 verschiedene Größen bei unsymmetrischer Masseverteilung) & & & Drehimpuls: L = r × p oder für ausge & & dehnten (starren) Körper: L = I⋅ω & & (i. allg. L und ω in verschiedenen Richtungen, bestimmt durch Tensor I der Trägheitsmomente) Drehmoment: & & & T= r ×F Bewegungsgleichung: Drehimpulserhaltung: & & bei T = 0 = ∑ Ti i & & Ti ist Drehmoment von Fiäuß & & =T L & =0 L 10.3. Geschwindigkeitsverteilung 10.3.1. Berechnung von Mittelwerten ⇒ Der Mittelwert A (Ensemble-Mittelwert) einer physikalischen Größe A 1 N A= ∑ Ai , N i =1 läßt sich nicht wie ein normaler Mittelwert berechnen wegen der sehr großen Teilchenzahlen. Man kann A berechnen, wenn man den Bruchteil fi kennt, der einen bestimmten Wert Ai annimmt. A= ∑ fi A i , mit ∑ fi = 1 i =1 i =1 Bei sehr großen Teilchenzahl liegen die Werte fi = f(Ai) dicht beieinander. ⇒ Übergang zur kontinuierlichen Funktion f(A) ⇒ f ( A ) dA = N(A ) dA N Bruchteil aller Teilchen, deren Größen A (z. B. A = vx, vy, vz) im Intervall zwischen A und A + dA liegt. ⇒ Normierung von f(A) +∞ ∫ f ( A ) dA = 1 −∞ ⇒ +∞ A = ∫ Af ( A ) dA −∞ 10.3.2. Geschwindigkeitsverteilung f(vx, vy, vz) ⇒ Die Funktion f(vx, vy, vz) muß dem Gleichverteilungsgesetz der Energie Ekin gehorchen. D. h. es muß gelten: m 2 3 v = kT, mit 2 2 +∞ 2 v = ∫∫∫ v 2 f v x , v y , v z dv x dv y dv z −∞ bzw . m 2 m 2 m 2 1 v = v = v = kT, mit 2 x 2 y 2 z 2 +∞ 2 v x = ∫∫∫ v 2x f v x , v y , v z dv x dv y dv z −∞ analog für v 2y , v 2z E kin = ( ) ( ) ⇒ f(vx, vy, vz) muß symmetrisch in vj (j = x, y, z) sein, nur abhängig von v 2j , normiert und für sehr große Werte v 2j → ∞ gegen Null gehen. Symmetrie: f(vx, vy, vz) = f(vx) • f(vy) •f(vz) ⇒ Ansatz: 2 , usw. ea+ b+ c = eaebec ⇒ ea; a = − kxv x 2 − k v x x f ( v x ) = cxe ; usw. kx aus Gleichverteilungssatz, cx aus Normierung. Ergebnis: Symmetrische Gaußverteilung für f(vx) 1 m 2 ⋅ exp − mv 2j / (2 kT) ; j = x, y, z f (v j) = 2 πkT 3 m 2 ⋅ exp − mv 2 / (2 kT) f vx , vy , vz = 2 πkT v 2 = v 2x + v 2y + v 2z ( [ ) ] ⇒ Verteilungsfunktion für Betrag v, v ≥ 0 2 ersetze: dvxdvydvz durch 4πv dv 3 m 2 ⋅ 4πv 2 ⋅ exp − mv 2 /( 2kT) dv f ( v) dv = 2πkT [ 3 − mv m 2 2 f ( v) = ⋅ 4 πv e 2 kT 2 πkT 2 ] vw = 2 kT m Wahrscheinlichste Geschwindigkeit (Maximum von f(v)) v= 8kT πm Teilt Fläche unter Kurve (f (v) in zwei gleiche Teilflächen v2 = 3kT m Gleichverteilungssatz für 3-Freiheitsgrade der Translation ⇒ f(v) bei verschiedenen Temperaturen T1 < T2 10.3.3 Energieverteilungsfunktion ⇒ Verteilungsfunktion für E = Ekin f ( E )dE = f [v( E)] ⋅ dv ⋅ dE dE 1 1 mv 2 → dE = mvdv; dv = dE 2 2 Em E 3 − 1 2 f ( E ) = 2 π Ee kT πkT E= ∝ ρ( E) ⋅ f MB ρ(E ) ∝ E Zustandsdichte (des idealen Gases) f MB = Ce − E / kT (Boltzmann-Faktor) Maxwell-Boltzmann-Verteilung C = const = 1 ∫e − E / kT dE = 1 , Z = Zus tandsumme Z ⇒ Verallgemeinerung von f(E) Dies gilt nicht nur für die kinetische Energie, sondern allgemein für die Energie. D. Michel, Vorlesung Experimentalphysik, Teil 1: Mechanik Ergänzung zur Beschreibung von Strömungen dΦ1 dΦ2 = −ρvx(x)dydz dz dy = ρvx(x+dx)dydz ∂v = ρ v x ( x) + x dx dydz ∂x dx Zufluß (Zustrom) Abfluß (Ausstrom) Differenz zwischen Zustrom und Ausstrom dΦ1 + dΦ 2 = ρ ⋅ ∂v x ∂v ⋅ dxdydz = ρ ⋅ x ⋅ dV ∂x ∂x ρ = const. (Annahme) ∂ & Wenn ρ = ρ( r), dann dΦ1 + dΦ 2 = (ρv x ) ⋅ dV. ∂x Die Flächen dxdy und dxdz liefern ähnliche Beiträge, die durch Änderungen der Komponenten vy und vz bestimmt sind. Gesamtfluß durch das Volumen dV ∂v y ∂v z ∂v dΦ = ρ x + + ⋅ dV ∂ x ∂ y ∂ z Die Größe Def . ↓ ∂v y ∂v z ∂v & ρ⋅ x + + : = ρdiv v ∂y ∂z ∂x heißt Quelldichte. Die Größe in Klammern ∂v x ∂v y ∂v z & & + + : = div v( r) ∂y ∂z ∂x & & ist die Divergenz des Geschwindigkeitsfeldes v( r) . Damit ergibt sich im Vergleich zur früheren Def: & & & ρ v ⋅ dA = ρ div v ⋅ dV ∫∫ ∫∫∫ A V ∂m ∂ ∂ρ =− = − ∫∫∫ ρdV = − ∫∫∫ ⋅ dV ∂t ∂t ∂t V V Φ = ∫ dΦ = Hier: Minuszeichen, da Überschuß d. Ausstroms gegenüber Zustrom, d.h. Massenabnahme!! In Worten: Die Differenz zwischen Zustrom und Ausstrom ist gleich der Massenänderung. Diese Massenänderung wird durch eine Quelle oder eine Senke innerhalb des gegebenen Volumens bewirkt (Quelldichte & ρ div v ≠ 0, d.h. positiv oder negativ). Schlußfolgerungen: 1. Da diese Gleichung für beliebige Volumina gelten muß, folgt daraus die Kontinuitätsgleichung in allgemeiner Form: ∂ρ & + ρ ⋅ div v = 0 ∂t 2. Für inkompressible Flüssigkeiten und Gase ∂ρ & & = 0, ρ( r) = const ⇒ div v = 0 ∂t 3. & Für allgemeinen Fall ρ = ρ( r) ∂ρ & + ⋅div ( ρv) = 0 ∂t 4. Gaußscher Satz (vgl. Lehrbücher der Vektoranalysis) & & & ρ vdA = ∫∫∫ div(ρv) ⋅ dV ∫∫ A V A ist die Fläche, die das Volumen V umschließt. Der Satz gilt allgemein für jeden Vektor D.Michel Vorlesung Experimentalphysik, Teil 1: Mechanik (zu Abschnitt 11.3.2.) Druckmessung in Strömungen a) Statischer Druck p Flüssigkeit (Fl) oder Gas (G) strömt tangential an seitlichen Öffnungen der Drucksonde vorbei. Bei Gültigkeit der Bernoulli-Gleichung (keine Wirbelbildung beim Vorbeiströmen, keine Reibung) wirkt tangential nur der statische Druck. Messung von Druck p mit Fl.-Manometer, Steighöhe einer Meßflüssigkeit ∆h, p = ρg∆h b) Gesamtdruck p0 Pitotrohr: an Meßöffnung ist v = 0, wenn das Loch der Drucksonde genau in der Symmetrieachse eines Stromlinienkörpers liegt, der die Strömung teilt. Messung von Druck p0 mit Fl.-Manometer c) Staudruck pS = p0 - p Prandtlsches Staurohr: Kombination von a) mit b). Die Druckdifferenz ist gegeben durch pS = p0 - p = ρv2/2 d) Venturi-Düse Rohr mit einer Verengung, wo die Düse beginnt. Beim Eintritt in die Düse sollen keine Wirbel gebildet werden. Kontinuitätsgleichung: A1v1 = A2v2 . Wegen A2 < A1 ⇒ v2 > v1 und p2 < p1 , so daß A 22 ρ 2 2 ρ 2 p1 − p 2 = v 2 − v = v 2 1 − 2 1 2 A 12