Elektrotechnik1
Werbung

AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Formelsammlung – Fachschule für Elektrotechnik
Teilgebiet – Elektrotechnik
Als Taschenrechner kann man heute auch optimal den Laptop benutzen.
s.z.B. Mathcad
oder den Windows Taschenrechner !!
Physik macht Spaß
Munz
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
1
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Grundlagen
Ladung:
Q ne
n
Q
e
Q = Ladung in As
n = Anzahl der Ladungsträger
e = Elementarladung
Spannung:
allgemein:
U
U
W
Q
Q
W
U
W Q U
U = Spannung in V
W = Arbeit in J ( = Ws = VAs )
Q = Ladung in As
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
2
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Über Potential:
A
φA
UAB
B
φB
C
C = Bezugspotential (Bezugspunkt)
U AB A B
UAB = Spannung = Potentialdifferenz zwischen Punkt A und B in V
φA = Potential des Punktes A bezüglich des Bezugspunktes in V
φB = Potential des Punktes A bezüglich des Bezugspunktes in V
Stromstärke:
I
Q
t
t
Q
I
Q I t
I = Stromstärke in A
Q = Ladung in As
t = Zeit in s
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
3
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Stromdichte:
S
I
A
A
S = Stromdichte in
I
S
I SA
A
mm 2
I = Stromstärke in A
A = Querschnitt in mm2
Widerstand:
R
U
I
I
U
R
U RI
R = Widerstand in Ω
U = Spannung in V
I = Stromstärke in A
R
l
A
A
l
R
l
R
l
A
A
l
R
l R A
A R
A R
l
l
A R
1
1
l = Länge in m
A = Querschnitt in mm2
= spezifischer Widerstand in
mm 2
(Rho)
m
= spezifischer Leitfähigkeit in
m
(Kappa)
mm2
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
4
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Leitwert:
G
1
R
R
1
G
G = Leitwert in S (Siemens)
R = Widerstand in Ω
Differenzieller Widerstand:
r
U
I
I
U
r
U I r
r = Differenzieller Widerstand in Ω
U = Spannungsänderung in V
I = Stromstärkeänderung in A
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
5
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Widerstand und Temperatur:
R
R
R20
R R20
R20
R
R20
R R20 R R20 1
1
R R A
E
A
20C
E 20C
E A
R = Widerstandsänderung in Ω bei
= Temperaturänderung in K
= Temperaturkoeffizient in
1 -1
=K
K
= Temperaturkennwert in K
R20 = Widerstand in Ω bei 20 °C
RA = Anfangswiderstand in Ω bei A
R = (End-)Widerstand in Ω bei E
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
6
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Stern-Dreieck-Stern-Umrechnung:
Dreieck in Stern:
Ra
R1 R3
R1 R2 R3
Rb
R1 R2
R1 R2 R3
Rc
R2 R3
R1 R2 R3
Stern in Dreieck:
R1 Ra Rb
Ra Rb
Rc
R3 Ra Rc
R2 Rb Rc
Rb Rc
Ra
Ra Rc
Rb
R1 , R2 , R3 = Dreieck-Widerstände
Ra , Rb , Rc = Stern-Widerstände
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
7
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Reihenschaltung von Widerständen:
I I1 I 2
Rg R1 R2
U U1 U 2
I = Gesamtstromstärke in A
U = Gesamtspannung in V
Rg = Gesamtwiderstand in Ω
Parallelschaltung von Widerständen:
U U1 U 2 U 3
I I1 I 2 I 3
1
1
1
1
Rg R1 R2 R3
1
G
R
Gg G1 G2 G3
I = Gesamtstromstärke in A
U = Gesamtspannung in V
Rg = Gesamtwiderstand in Ω
Gg = Gesamtleitwert in S
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
8
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Bei Parallelschaltung von 2 Widerständen gilt:
Rg
R1 R2
R1 R2
R2
R1
R1 Rg
I1
R2
I R1 R2
R2
R1 I1
I2
R1
R2 I 2
I1
I1
R2 I 2
R1
I2
R1 I1
R2
R2
R2 I
R2
I1
I2
R1
I
R1 R2
I
R2 Rg
R1 Rg
I1 R2
I 2 R1
R1
R2 Rg
I1
R2
R1 R2 I 2
R1
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
I2
R1 I1
I I 1
R2 I
R1 R2
R2 I
R1
I2
I
R1 R2 I1
R2
R1
R2 I 2
I I 2
R1 I
R1 R2
9
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Elektrische Energie / Elektrische Arbeit:
W=UIt
W=UQ
W = Arbeit in J =VAs = Ws = Nm
U = Spannung in V
I = Stromstärke in A
t = Zeit in s
Q = Ladung in As
1 kWh = 1 103 Wh = 3,6 103 kWs = 3,6 106 Ws = 3,6 106 J
1 J = 1 Ws = 1 10-3 kWs =
1
1
10-3 Wh =
10-6 kWh = 0,278 10-6 kWh
3,6
3,6
Leistung:
P
W
t
P
U I t
U I
t
P
U2
R
P I2 R
P = Leistung in W = VA =
Nm J
=
s
s
W = Arbeit in VAs = Ws = J = Nm
U = Spannung in V
I = Stromstärke in A
t = Zeit in s
R = Widerstand in Ω
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
10
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Wirkungsgrad:
Pab
Pzu
Wab
Wzu
immer <
1 !!!
g 1 2
= Wirkungsgrad
Pab = abgegebene Leistung in W
Pzu = zugeführte Leistung in W
Wab = abgegebene Energie/Arbeit in J
Wzu = zugeführte Energie/Arbeit in J
g = Gesamtwirkungsgrad
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
11
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Spannungsteiler:
unbelastet:
U2
R2
U
R1 R2
U
R1
R2 U
R1 R2
U2
R2 U 1
R1
R2
R1 U 2
U1
R1 R2 U 2
R2
R2 U
R2
U2
U 1 R1
U 2 R2
U1
R1
U2
R2
R1 U 2
(U U 2 )
R1 U 2
R2
R2 U 1
U2
belastet:
RX
R2 R3
R2 R3
R3
R2 R X
R2 R X
R2
R3 R X
R3 R X
RX = Ersatzwiderstand für R2 || R3 (RL)
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
12
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
U2
RX
U
R1 R X
U2
RX U
R1 R X
R1
RX U
RX
U2
U
U 1 R1
U 2 RX
U1
R1 U 2
RX
RX
R1 U 2
U1
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
RX
R1 U 2
(U U 2 )
U2
RX U1
R1
R1 RX U 2
RX
R1
RX U1
U2
13
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Spannungs- und Strom-Pfeilsysteme:
VZS (Verbraucher-Zählpfeil-System):
P = U I > 0 (Verbraucher, positive Leistung)
P = U I < 0 (Erzeuger, negative Leistung)
EZS (Erzeuger-Zählpfeil-System):
P = U I > 0 (Erzeuger, positive Leistung)
P = U I > 0 (Verbraucher, negative Leistung)
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
14
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Aktive Zweipole: (VZS)
Leerlauf: U = U0 ;
I=0
Kurzschluß: U = 0 ; I = -IK
U = Klemmenspannung
U0 = Leerlaufspannung
Ik = Kurzschlußstrom
Die Bezugspfeile für Strom I und Spannung U werden so gewählt,
daß U0 und Ik positiv sind !!
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
15
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Ideale Quellen:
Ideale Spannungsquelle:
U k = Uk = U0 = Uq
Uk = Klemmenspannung
U0 = Leerlaufspannung
Uq = Quellenspannung
Ideale Stromquelle:
Ik = Iq = -I
Ik = Klemmenstrom
Iq = Quellenstrom
Die Richtungen für die Pfeile von Uq bzw. Iq werden so gewählt,
daß Uq = Uk bzw. Iq = Ik ist.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
16
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Leistungsanpassung an Quellen:
Pmax bei R1 = Ri
weil URi = UR1
(Spannungsteiler)
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
17
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Reale Quellen:
Reale Spannungsquelle:
I = 0 ( R Ω)
Leerlauf:
Uk = U0 = Uq
Uk = 0 ( R 0 Ω)
Kurzschluß:
I = - Ik = -Iq
Ik
Uq
Ri
U0
Ri
Ri
U0
Ik
U
U k U q U Ri U k U q Ri I U k U q 0 I
Ik
Uk immer < Uq !!!!!
Ik = Klemmenstrom
Uq = Quellenspannung
U0 = Leerlaufspannung
URi = Spannung am Innenwiderstand
Ri = Innenwiderstand
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
18
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Reale Stromquelle:
Kurzschluß:
Uk = 0 ( R 0 Ω)
I = - Iq = - Ik
Leerlauf:
I = 0 ( R Ω)
Uk = U0
Uk
I1 I q
Gi Gi
Gi
Ik
U0
I
I I1 I q I Gi U k I q I k U k I q
U0
U = Uk = UGi = Klemmenspannung
Iq = Quellenstrom
Ik = Klemmenstrom
I1 = Strom durch Innenleitwert
Gi = Innenleitwert
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
19
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Umrechnung Strom- in Spannungsquelle:
Bei Leerlauf U 0
Iq
Gi
U 0 U q ; Ri
1
Gi
Iq = Quellenstrom
Uq = Quellenspannung
U0 = Leerlaufspannung
Ri = Innenwiderstand
Gi = Innenleitwert
!!!! Pfeilrichtung von Iq und Uq sind entgegengesetzt !!!!!
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
20
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Umrechnung Spannungsquelle in Stromquelle:
Bei Kurzschluß I k
Uq
Ri
I I q I k ; Gi
1
Ri
Ik = Klemmenstrom
Iq = Quellenstrom
Uq = Quellenspannung
Ri = Innenwiderstand
Gi = Innenleitwert
!!!! Pfeilrichtung von Uq und Iq sind entgegengesetzt !!!!!
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
21
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Knotensatz ( 1. Kirchhoffsches Gesetz ):
„ Die Summe aller Ströme
in einem Knoten ist Null „
I I1 I 2 I 3 0
Abfließende Ströme ( I1 ) werden z. B. negative gezählt, zufließende Ströme ( z.B. I3 ) werden positiv gezählt oder
umgekehrt.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
22
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Maschensatz ( 2. Kirchhoffsches Gesetz ) :
„ Die Summe aller Spannungen
in einer Masche ist Null „
Jede Masche hat einen Umlaufsinn !!
Stimmt die Richtung des Spannungspfeiles nicht mit dem Umlaufsinn der Masche überein, so ist diese Spannung mit
negativem Vorzeichen in die Maschengleichung einzusetzten.
Stimmt die Richtung des Spannungspfeiles mit dem Umlaufsinn der Masche überein, so ist diese Spannung mit
positivem Vorzeichen in die Maschengleichung einzusetzten.
Masche 1: U2 – U4 + U5 - U1 = 0
Masche 2: U3 – U4 + U6 – U7 = 0
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
23
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Berechnungen an einem Netzwerk mit Maschen- und Knotensatz:
Enthält ein Netzwerk m Zweigströme, so sind zu deren Berechnung m unabhängige Gleichungssysteme nötig.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
24
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
n Knotenpunkte liefern (n-1) unabhängige Knotengleichungen
Knoten A: I1 + I3 – I2 = 0 I2 = I1 + I3
Knoten B: I2 – I1 – I3 = 0 I2 = I1 + I3
Daraus folgt, daß noch m – (n-1) unabhängige Maschengleichungen benötigt werden.
Masche 1: Uq2 + U2 + U1 – Uq1 = 0
Masche 2: Uq3 – U3 – U2 – Uq2 = 0
!!! Gleichungen sind voneinander unabhängig, wenn jede Gleichung mindestens !!! !!! ein Glied enthält, das in den
übrigen Gleichungen nicht vorhanden ist !!!
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
25
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Prinzip der Ersatzspannungsquelle:
1. Bestimmung von Uqe ( Ersatzquellenspannung ) :
Im Leerlauf ( ohne R3 ) Uqe = U (in Zeichnung: unbelasteter Spannungsteiler)
2. Bestimmen von Rie ( Ersatzinnenwiderstand ) :
- Alle Spannungsquellen werden kurzgeschlossen („überbrückt“)
- Alle Stromquellen werden unterbrochen
Anschließend wird der Widerstand des Zweipols bestimmt.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
26
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Elektrisches Feld
Lösen von linearen Gleichungssystemen nach der Cramerschen Regel:
Nur bis maximal 3 Unbekannte !!!
Gleichungsschreibweise :
1.
a1x + b1y + c1z = d1
2.
a2x + b2y + c2z = d2
3.
a3x + b3y + c3z = d3
Matrixschreibweise:
a1
a2
a
3
b1
b2
b3
c1 x d1
c2 y d 2
c3 z d 3
Berechnung der Werte:
x
x
a1
a2
a3
y
b1
b2
b3
y
z
z
c1
c2 a1 b2 c3 b1 c2 a3 c1 a2 b3 a3 b2 c1 b3 c2 a1 c3 a2 b1
c3
d1
x d 2
d3
b1
b2
b3
c1
c2 d1 b2 c3 b1 c2 d 3 c1 d 2 b3 d 3 b2 c1 b3 c2 d1 c3 d 2 b1
c3
a1
y a2
a3
d1
d2
d3
c1
c2 a1 d 2 c3 d1 c2 a3 c1 a2 d 3 a3 d 2 c1 d 3 c2 a1 c3 a2 d1
c3
a1
z a2
a3
b1
b2
b3
d1
d 2 a1 b2 d 3 b1 d 2 a3 d1 a2 b3 a3 b2 d1 b3 d 2 a1 d 3 a2 b1
d3
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
27
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Lösen von linearen Gleichungssystemen nach dem Gauß’schen Algorithmus:
Möglich für beliebig viele Unbekannte.
Gleichungsschreibweise :
Matrixschreibweise:
1. a1w + b1x + c1y + d1z = q1
I a1
II a2
III a3
IV a4
2. a2w + b2x + c2y + d2z = q2
3. a3w + b3x + c3y + d3z = q3
4. a4w + b4x + c4y + d4z = q4
b1
b2
b3
b4
c1
c2
c3
c4
d1 w q1
d 2 x q2
d 3 y q3
d 4 z q4
Berechnung der Werte:
1. Man multipliziert die Gleichung II mit dem Faktor
a1
und addiert sie zur Gleichung I. Dabei wird das Glied a2
a2
zu 0.
2. Nun multipliziert man die Gleichung III mit dem Faktor
a1
und addiert sie zur
a3
Gleichung I. Dabei wird das Glied a3 zu 0.
3. So verfährt man mit allen Gleichungen.
Jetzt sieht das Gleichungssystem so aus:
I a1 b1 c1 d1 w q1
II 0 b2 ' c2 ' d 2 ' x q2 '
III 0 b3 ' c3 ' d 3 ' y q3 '
IV 0 b4 ' c4 ' d 4 ' z q4 '
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
28
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
4. Nun beginnt man mit Gleichung
III. Man multipliziert sie mit dem Faktor
b2 '
und addiert sie zur Gleichung II.
b3 '
Dabei wird das Glied b3’ zu 0.
5. Dann multipliziert man die Gleichung
IV mit dem Faktor
b2 '
und addiert sie zur Gleichung II. Dabei wird das
b4 '
Glied b4’ zu 0.
So verfährt man fort, bis man eine Matrix hat, in der in einer Zeile nur noch eine Unbekannte vorhanden ist. Diese
Matrix sollte dann so aussehen:
d1 w q1
I a1 b1 c1
II 0 b2 ' c2 ' d 2 ' x q2 '
III 0 0 c3 ' ' d 3 ' ' y q3 ' '
0 d 4 ' ' ' z q4 ' ' '
IV 0 0
Man rechnet diese Unbekannte aus und setzt sie in eine Gleichung mit zwei Unbekannten ein, damit man die zweite
Unbekannte berechnen kann. So fährt man fort, bis alle Unbekannten ausgerechnet sind.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
29
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Das Knotenpotential-Verfahren:
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
30
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
1. Alle linearen Spannungsquellen werden in lineare Stromquellen umgewandelt. I q
2. Alle Widerstände in Leitwerte umwandeln. G
Uq
R
1
R
2. Strom- und Spannungspfeile festlegen.
3. Knoten nummerieren und Bezugsknoten festlegen
4. Aufstellen der Leitwert-Matrix (Beispiel siehe Seite 5):
Die Leitwert-Matrix ist symmetrisch zur Hauptdiagonalen
(von links oben nach rechts unten)
- Sämtliche Elemente der Hauptdiagonalen sind positiv.
Alle anderen Elemente der Matrix sind negativ oder null.
- Jedes Element der Hauptdiagonalen wird aus der Summe der Leitwerte gebildet, die mit einem Pol am
zugehörigen Knoten liegt.
- Die weiteren Elemente der Zeile werden durch diejenigen Leitwerte gebildet, die vom betrachteten Knoten
zum jeweiligen Nachbarknoten führen und werden mit negativem Vorzeichen in die Matrix eingetragen.
5. Aufstellen der rechten Seite des Gleichungssystems:
-
- Wird aus den Quellenströmen gebildet
- Fließt ein Quellenstrom in den Knoten hinein, so erhält er ein positives Vorzeichen.
- Fließt der Quellenstrom aus dem Knoten heraus, so erhält er ein negatives Vorzeichen.
6. Lösen des Gleichungssystems (z.B. mit Gauß’schem oder Cramerschem Verfahren)
7. Berechnen der Zweigspannungen aus den Knotenpotentialen. Dabei auf umgewandelte lineare Spannungsquellen
achten. z.B, UR1≠ U1
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
31
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Das Maschenstrom-Verfahren:
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
32
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
1. Alle linearen Stromquellen werden in lineare Spannungsquellen umgewandelt. U q
2. Alle Leitwerte in Widerstände umwandeln. R
Iq
G
1
G
2. Strom- und Spannungspfeile festlegen.
3. Alle Maschen einzeichnen.
4. Aufstellen der Widerstands-Matrix (Beispiel siehe Seite 5):
Jeder Zeile der Matrix beschreibt die Schaltungsstruktur einer Masche
Die Widerstands-Matrix ist symmetrisch zur Hauptdiagonalen
(von links oben nach rechts unten)
- Jedes Element der Hauptdiagonalen wird aus der Summe der Widerstände der betroffenen Masche gebildet.
- Jedes weiteren Elemente der Zeile wird aus der Summe jener Widerstände der Masche gebildet, die von dem
der Spalte zugehörigen Maschenstrom durchflossen werden.
Das Vorzeichen des Elements ist positiv, wenn der Strom der beiden benachbarten Maschen gleichsinnig
durch das Bauteil läuft.
Das Vorzeichen ist negativ, wenn der Strom gegensinnig durch das Bauteil läuft.
5. Aufstellen der rechten Seite des Gleichungssystems:
-
Wird aus den Quellenspannungen gebildet
Wenn die Richtung einer Quellenspannung gleich dem Umlaufsinn der Masche ist, erhält die Spannung ein
negatives Vorzeichen.
- Wenn die Richtung einer Quellenspannung entgegen dem Umlaufsinn der Masche ist, erhält die Spannung
ein positives Vorzeichen.
6. Lösen des Gleichungssystems (z.B. mit Gauß’schem oder Cramerschem Verfahren)
-
7. Berechnen der Zweigströme aus Knotengleichungen. Dabei auf umgewandelte lineare
Stromquellen achten. z.B, I6≠ Iq6
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
33
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Die Überlagerungsmethode:
Vorgehensweise:
-
Das Netzwerk wird nacheinander mit nur einer der vorhandenen Quellen betrieben.
-
Die Quellenspannungen der übrigen Spannungsquellen werden zu Null (=kurzgeschlossen). Die
Innenwiderstände im Zweig bleiben jedoch bestehen.
-
Es werden die Zweigströme festgelegt und berechnet. Dabei auf Richtung achten und festhalten.
-
Die errechneten Ströme werden dann nach Betrag und jeweiliger festgehaltener Richtung addiert
(=überlagert). Dadurch erhält man den tatsächlichen Strom.
Beispiel: Leitwert-Matrix für Knotenpotential-Verfahren:
G1 G2 G4
G2
G4
G2
G2 G3 G5
G5
G4
U 10 I q1
G5
U
0
20
G4 G5 G6 U 30 I q 6
Beispiel: Widerstands-Matrix für Maschenstrom-Verfahren:
R1 R2 R4
R2
R4
R2
R2 R3 R5
R5
R4
U 10 U q1
R5
U 20 0
R4 R5 R6 U 30 U q 6
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
34
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Das elektrische Feld:
Als elektrisches Feld bezeichnet man den Raumbereich, in dem auf Ladungsträger elektrische Kräfte ausgeübt
werden.
Die elektrische Feldstärke E:
E
F
Q
Q
E = elektrische Feldstärke in
F = Kraft in N =
F
E
F E Q
V
(gerichtete Größe, wird auch als Vektor dargestellt: E )
m
Ws VAs
=
m
m
Q = Ladung in C = As
Wenn die Kraft F negativ ist, gibt das an, daß die Kraft entgegen der Feldrichtung wirkt !!
Richtung von Feldlinien:
Feldlinien verlaufen von Plus nach Minus
Sie treten immer senkrecht (im Winkel von 90° zur Oberfläche) aus der Quelle (Plus-Pol) aus und senkrecht bei der
Senke (Minus-Pol) ein.
Spezialfall Homogenes Feld:
Die Feldlinien verlaufen parallel. Der Abstand der Feldlinien untereinander ist gleich.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
35
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Feldstärke, Arbeit und Spannung:
Wirkt die Kraft F auf eine Ladung Q über eine Strecke s hinweg, so wird die Arbeit W verrichtet und es wirkt die
Spannung U.
Grundformeln: W F s ; E
W E Q s
Q
W
F
;U
Q
Q
E
W
Qs
E
U
s
s
W
E Q
W
Es
U Es
s
U
E
W = Arbeit in Ws
E = elektrische Feldstärke in
V
m
Q = Ladung in C = As
s = Strecke in m
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
36
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Äquipotentialflächen, Äquipotentiallinien:
Flächen im elektrischen Feld, die gegenüber einem Bezugsniveau ( meist φ=0V) gleiches Potential besitzen, heißen
Äquipotentialflächen. In der Zeichenebene werden sie als Äquipotentiallinien dargestellt.
über Potential:
A
φA
B
φB
C
C = Bezugspotential (φ=0V)
Linien A und B sind Äquipotentiallinien.
Beachte:
Äquipotentiallinien stehen senkrecht auf den Feldlinien. Im homogenen Feld haben die Äquipotentiallinien überall
zueinander den selben Abstand.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
37
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Das elektrostatische Feld:
Das elektrostatische Feld ist ein Sonderfall des elektrischen Feldes. Die Elektrostatik ist die Lehre von Kräften
zwischen ruhenden Ladungen.
Diese Kräfte nennt man Coloumb-Kräfte.
Q1
Q2
r
Merke:
Zwei gleichnamige Ladungen stoßen sich ab.
Zwei ungleichnamige Ladungen ziehen sich an.
F
Q1 Q2
4 0 r 2
r
Q1 Q2
4 0 F
Q1
4 0 r 2 F
Q2
Q2
4 0 r 2 F
Q1
F = Coloumb-Kraft in N
Q1 = Ladungsmenge der ersten Ladung in C = As
Q2 = Ladungsmenge der zweiten Ladung C = As
ε0 = elektrische Feldkonstante mit 8,85 10 12
As
Vm
r = Abstand zwischen den Ladungen
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
38
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Aufbau des elektrostatischen Feldes:
Zwei planparallele leitende Platten, deren Zwischenraum mit Luft gefüllt ist, liegen an einer Gleichspannungsquelle.
Der vom elektrostatischen Feld erfüllte Raum wird Dielektrikum genannt.
Beobachtung:
Es werden solange Ladungen transportiert, bis der Ladungsunterschied an den Platten so groß ist, dass die dabei
entstehende Spannung gleich der Quellenspannung ist.
Beachte:
Das elektrostatische Feld bleibt nach Abtrennen der Gleichspannung bestehen.
Uq E s
E
Uq
s
s
Uq
E
Uq = anliegende Spannung in V
E = elektrische Feldstärke in
V
m
s = Plattenabstand in m
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
39
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Leiter und Nichtleiter im elektrischen Feld:
Bei Leitern im el. Feld findet eine sogenannte Ladungstrennung (=Influenz) statt. Im
Innern des eingebrachten Leiters ist ein feldfreier Raum.
Bei Nichtleitern findet eine sogenannte Polarisation (=Dipolbildung) im Nichtleiter
statt. Es werden die Ladungen innerhalb der Moleküle im Nichtleiter verschoben.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
40
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Die Kapazität:
C
Q
U
Einheit: C
C
U
Q C U
0 r A
r
As
F
V
d
d
Q
C
0 r A
A
C
Cd
0 r
Cd
0 A
Bei Wickelkondensator:
A
C 2 0 r
d
C = Kapazität in F
Q = Ladung in As (=C)
U = Spannung in V
ε0 = elektrische Feldkonstante = 8,85 10 12
As
Vm
εr = relative Dielektrizitätszahl (Materialkonstante) z.B.: εr Luft = 1
A = Fäche in m2
d = Abstand in m
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
41
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Sonderfälle:
2 verschiedene Dielektrika auf kompletter Fläche A:
Cg
0 r1 r 2 A
d1 r 2 d 2 r1
2 verschiedene Dielektrika auf komplettem Abstand d:
Cg
0 ( r1 A1 r 2 A2 )
d
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
42
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Gespeicherte Energie eines Kondensators:
W
C U 2
2
C
W 2
U2
U
W 2
C
W = Energie (=Arbeit) in Ws
C = Kapazität in F
U = Spannung in V
1 Ws = 1 10-3 kWs =
1
1
10-3 Wh =
10-6 kWh = 0,278 10-6 kWh = 1J
3,6
3,6
1 kWh = 1 103 Wh = 3,6 103 kWs = 3,6 106 Ws = 3,6 106 J
Parallelschaltung von Kondensatoren:
Qg Q1 Q2
Qg Cg U
U U1 U 2
U
Cg C1 C2
Cg
Qg
Cg
Q1 Q2
C1 C 2
Qg
U
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
43
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Reihenschaltung von Kondensatoren:
Qg Q1 Q2
Qg Cg U g C1 U1 C2 U 2
U g U1 U 2
Ug
Qg
1
1
1
C g C1 C2
Cg
Qg
Cg
Q1 Q2 Qg Qg
C1 C2 C1 C2
Ug
Bei zwei Kondensatoren gilt:
Cg
C1 C2
C1 C2
C1
C2
C2 C g
C2 C g
C1 C g
C1 C g
Merke: Am kleinen Kondensator liegt die große Spannung
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
44
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Lade- und Entladevorgänge beim Kondensator:
Laden des C
Spannung am Kondensator:
Spannung am Widerstand, Strom i:
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
Entladen des C
Spannung am Kondensator:
Spannung am Widerstand, Strom i:
45
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Nach 1τ ist der Kondensator noch zu 37%,
nach 2τ noch zu 14%, nach 3τ noch zu 5%,
Nach 1τ ist der Kondensator zu 63%,
nach 4τ noch zu 2% geladen
nach 2τ zu 86%, nach 3τ zu 95%,
und nach 5τ ganz entladen.
nach 4τ zu 98% und nach 5τ zu 100%
seines Endwertes aufgeladen.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
46
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Zeitkonstante τ beim Kondensator:
RC
R
C
C
R
R=
Widerstand in Ω ; C = Kapazität in F ; τ in s
Im Einschaltmoment wirkt der Kondensator wie ein Kurzschluß (uc = 0):
imax
U0
R
R
U0
imax
U 0 R imax
U0 = maximale Spannung am Kondensator
R = Widerstand in Ω
imax = maximaler Strom im Einschaltaugenblick
Zu jedem Zeitpunkt gilt:
U 0 uR uC
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
47
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Berechnung zum Ladevorgang des Kondensator:
Spannung am Kondensator:
u
t
t ln 1 C
u
U0
ln 1 C
U0
t
uC t U 0 1 e
t
R C
uC t U 0 1 e
C
u
t R C ln 1 C
U0
t
u
R ln 1 C
U0
R
t
u
C ln 1 C
U0
Spannung um Widerstand:
u R t U 0 e
u R t U 0 e
u
t ln R
U0
t
u
t R C ln R
U0
t
R C
C
t
R
t
u
ln R
U0
t
u
C ln R
U0
u
R ln R
U0
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
48
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Strom:
it imax e
it imax e
i
t ln
imax
t
i
t R C ln
i max
t
RC
C
t
i
R ln
imax
R
t
i
ln
imax
t
i
C ln
imax
tL 5
U0 = Maximale Spannung am Kondensator in V
uC(t) = Spannung am Kondensator zum Zeitpunkt t in V
uR(t) = Spannung am Widerstand zum Zeitpunkt t in V
i(t) = Strom zum Zeitpunkt t in A
t = Zeitpunkt in s
τ = Zeitkonstante in s
R = Widerstand in Ω
C = Kapazität in F
tL = Zeit bis der Kondensator nahezu voll geladen ist
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
49
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Berechnung zum Entladevorgang des Kondensator:
Spannung am Kondensator:
uC t U 0 e
u C t U 0 e
u
t ln C
U0
t
u
t R C ln C
U0
t
R C
C
R
t
t
u
ln C
U0
t
u
C ln C
U0
u
R ln C
U0
Spannung um Widerstand:
u
t ln R
U0
t
u R t U 0 e
u R t U 0 e
t
R C
C
u
t R C ln R
U0
t
R
t
u
ln R
U0
t
u
C ln R
U0
u
R ln R
U0
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
50
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Strom:
it imax e
it imax e
i
t ln
i max
t
t
R C
i
t R C ln
imax
t
R
i
C ln
i max
C
t
i
ln
imax
t
i
R ln
i max
tE 5
U0 = Maximale Spannung am Kondensator in V
uC(t) = Spannung am Kondensator zum Zeitpunkt t in V
uR(t) = Spannung am Widerstand zum Zeitpunkt t in V
i(t) = Strom zum Zeitpunkt t in A
t = Zeitpunkt in s
τ = Zeitkonstante in s
R = Widerstand in Ω
C = Kapazität in F
tE = Zeit bis der Kondensator nahezu entladen ist
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
51
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Grundlagen Magnetismus:
Unterscheidung der Magnete in:
-
Dauermagnete (Permanentmagnete)
Elektromagnete
Erdmagnetfeld
Die magnetischen Feldlinien treten am N-Pol senkrecht aus und am S-Pol wieder senkrecht ein.
Im Inneren des Magneten verlaufen die magnetischen Feldlinien vom S-Pol zum N-Pol.
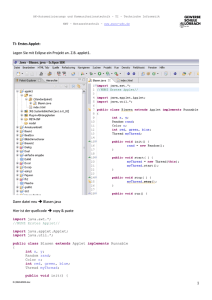
Magnetfeld eines stromdurchflossenen Leiters
Wird ein Leiter von einem Strom durchflossen, so baut sich um ihn kreisförmig ein Magnetfeld auf.
bedeutet:
Strom fließt aus dem Leiter
X bedeutet:
Strom fließt in den Leiter
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
52
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Feldlinien in einer Spule:
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
53
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
54
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Der magnetische Fluß (phi):
Einheit: 1Vs 1Wb
Die Anzahl der magnetischen Feldlinien wir als sog. magnetischer Fluß (phi) bez.
Magnetische Flußdichte B:
B
A
B A
B Vs2
m
A
B
I
N
Wb
T
m2
B = magnetische Flußdichte in T (Tesla)
= magnetischer Fluß in Wb
A = Fläche in m2
Die magnetische Durchflutung (theta):
I N
N
I
= magnetische Durchflutung in A (auch magnetische Spannung)
I = Strom in A
N = Anzahl der Windungen der Spule
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
55
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Magnetische Feldstärke H:
H
IN
lm
I
H
lm
H lm
N
N
lm
lm H
H = magnetische Feldstärke in
IN
H
H lm
I
lm
H
H
A
m
A
m
I = Strom in A
N = Anzahl der Windungen der Spule
lm = mittlere Feldlinienlänge in m
= magnetische Durchflutung in A (auch magnetische Spannung)
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
56
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Zusammenhang zwischen magnetischer Flußdichte B und Feldstärke H:
B 0 r H
r
H
B
0 r
B
0 H
μ0 = magnetische Feldkonstante 1,256 10 6
Vs
; μr = Permeabilitätszahl (bei Luft μr=1)
Am
Magnetisierungskennlinie:
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
57
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Hysteresekurve (-schleife):
BR = Remanenz (= Restmagnetismus)
HC = Koerzitivfeldstärke (=Ummagnetisierungsfeldstärke)
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
58
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Kräfte auf stromdurchflossene Leiter:
Feldlinien laufen entgegengesetzt
Feldlinien laufen gleich
Feldschwächung
Feldverstärkung
Leiter ziehen sich an
Leiter stoßen sich ab
Die Bewegung der Leiter folgt immer zum schwächeren Feld hin.
F
0 l I1 I 2
2 r
F
k l I1 I 2
r
r
0 l I1 I 2
2 F
r
k l I1 I 2
F
I2
2 F r
0 l I1
l
I1
k
I2
0
2
F r
k l I1
F r
k l I2
F r
k I 2 I1
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
59
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
I1
2 F r
0 l I 2
l
2 F r
0 I 2 I1
F = Kraft in N
μ0 = magnetische Feldkonstante 1,256 10 6
Vs
Am
l = wirksame Leiterlänge in m
I1 ; I2 = Strom durch den jeweiligen Leiter in A
r = Abstand der Leiter
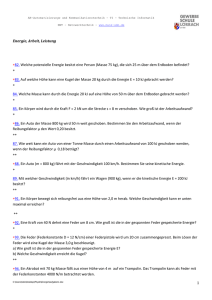
Tragkraft eines Magneten:
A BL
F
2 0
2
A
F 2 0
2
BL
W F s
s
BL
F 2 0
A
F
W
s
W
F
F = Kraft in N ; W = Hubarbeit des Magneten in Nm
A = wirksame Ankeroberfläche
BL = magnetische Flußdichte der Spule in T
μ0 = magnetische Feldkonstante 1,256 10 6
Vs
Am
s = Abstand von Anker und Magnet in m
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
60
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Stromdurchflossener Leiter im Magnetfeld (Motorprinzip):
Der stromdurchflossene Leiter bildet mit seinem Magnetfeld und dem des Dauermagneten ein resultierendes
Magnetfeld. Es entsteht eine Feldverstärkung und eine Feld-schwächung. Der stromdurchflossene Leiter bewegt sich
in Richtung Feldschwächung.
Linke-Hand-Regel:
Hält man die linke Hand so, dass die Feldlinien
auf die Innenfläche der Hand auftreffen und die
gestreckten Finger in Stromrichtung zeigen,
dann gibt der abgespreizte Daumen
die Richtung der Kraft F an.
U-V-W-Regel (rechte Hand):
Ursache: Strom I
Vermittlung: Magnetfeld B
Wirkung: Kraft F
F B I l N
l
F
F
BI N
F
I l N
F
N
B I l
B
I
F
B l N
Vs
Ws Nm
A m
N
2
m
m
m
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
61
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
F = Kraft in N
B = Flußdichte in
Vs Wb
T
m2 m2
I = Strom in A
l = wirksame Leiterlänge in m
N = Anzahl der Leiter im Magnetfeld
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
62
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Induktion (Generatorprinzip):
Schneidet ein Leiter die Feldlinien eines Magnetfeldes, so wird in dem Leiter eine Spannung erzeugt (=induziert).
Rechte-Hand-Regel:
Treffen die Feldlinien auf die Innenfläche der
Hand auf und zeigt der abgespreizte Daumen
in Richtung der Leiterbewegung, dann fließt
der induzierte Strom in Richtung der
ausgestreckten Finger.
U-V-W-Regel (rechte Hand):
Ursache: Kraft F (Bewegung v)
Vermittlung: Magnetfeld B
Wirkung: Strom I
U i B v l N
N
B
Ui
vl N
v
Ui
Bl N
l
Ui
Bv N
Ui
Bvl
Ui Vs2 m m V
m
s
Ui = induzierte Spannung in V
B = Flußdichte in
Vs Wb
T
m2 m2
v = Geschwindigkeit in
m
s
l = wirksame Leiterlänge in m
N = Anzahl der Leiter im Magnetfeld
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
63
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Die induzierte Spannung Ui ist negativ, da sie nach der Lenzschen Regel so gerichtet ist, dass sie ihrer Ursache
entgegenwirkt.
Lenzsche Regel:
Die induzierte Spannung Ui ist stets so gerichtet, dass sie ihrer Ursache (Kraft F) entgegenwirkt.
Induktion der Ruhe (Trafoprinzip)
Primärspule
Sekundärspule
Ändert sich der magnetische Fluss durch die Stromänderung I, so wird in der Sekundär-spule während der Änderung
eine Spannung Ui induziert. (Lenzsche Regel)
Ui
N
t
N
t
U i t
N
Ui
U i t
N
Ui = induziert Spannung in V
N = Anzahl der Windungen der Sekundärspule
= magnetischer Flußdifferenz in Wb
t = Zeitänderung in s
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
64
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Spannungsübersetzungsverhältnis:
ü
u1
u2
u2
u1
ü
i1
i2
ü
u1 ü u2
u1 = Primärspannung in V
u2 = Sekundärspannung in V
ü = Übersetzungsverhältnis des Trafo
Stromübersetzungsverhältnis:
ü
i2
i1
i2 ü i1
i1 = Strom in der Primärspule in A
i2 = Strom in der Sekundärspule in A
ü = Übersetzungsverhältnis des Trafo
ü
N1
N2
N2
N1
ü
N1 ü N 2
N1 = Anzahl der Windungen auf der Primärspule
N2 = Anzahl der Windungen auf der Sekundärspule
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
65
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Widerstandsübersetzung (-übertrager):
R1 ü 2 R2
ü
R2
R1
ü2
R1
R2
R1 = Widerstand der in der Quelle wirkt in Ω
R2 = Widerstand im Sekundärkreis in Ω
ü = Übersetzungsverhältnis des Trafo
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
66
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Selbstinduktion:
v
Ändert sich in einer Spule das Magnetfeld (I B), so wird in der Spule selbst eine Spannung induziert.
Selbstinduktionsspannung Ui
Ui
L I
t
L
t
U i t
I
I
L I
Ui
U i t
L
Ui = Selbstinduktionsspannung in V
L = Induktivität in H
I = Stromänderung in A
t = Zeitänderung in s
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
67
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Induktivität:
Herleitung:
Ui
N
I N
; B A ; B 0 r H ; H
;
t
lm
Ui
Ui
L
N
t
N B A
t
0 r A N N I
l m t
0 r A
lm
L Vs m
2
Am m
N 0 r H A
N2
t
0 r A
lm
lm
N 2
0 r A
L
I
t
N2 A
N 0 r I N A
t l m
L I
t
L lm
0 r N 2
N
L lm
0 r A
Vs
H
A
L = Induktivität in H (Henry)
μ0 = magnetische Feldkonstante 1,256 10 6
Vs
Am
μr = Permeabilitätszahl (bei Luft μr=1)
A = Fläche in m2
lm = mittlere Feldlinienlänge in m
N = Windungsanzahl
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
68
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Energie im magnetischen Feld:
W
1
L I2
2
I
2 W
L
L
2 W
I2
W = Energie (=Arbeit) in Ws
L = Induktivität in H
U = Spannung in V
1 Ws = 1 10-3 kWs =
1
1
10-3 Wh =
10-6 kWh = 0,278 10-6 kWh = 1J
3,6
3,6
1 kWh = 1 103 Wh = 3,6 103 kWs = 3,6 106 Ws = 3,6 106 J
Reihenschaltung von Spulen:
U g U1 U 2 U 3
Lg L1 L2 L3
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
69
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Parallelschaltung von Spulen:
U U1 U 2 U 3
1
1
1
1
L g L1 L2 L3
für 2 Spulen gilt:
Lg
L1 L2
L1 L2
L2
L1
L2 Lg
L2 Lg
L1 Lg
L1 Lg
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
70
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Ein- und Ausschalten einer Spule:
Einschalten der Spule
Ausschalten der Spule
Spannung an der Spule:
Spannung an der Spule:
Spannung am Widerstand, Strom i:
Spannung am Widerstand, Strom i:
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
71
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Nach 1τ fließt 63%, nach 2τ fließt 86%,
Durch die Gegeninduktion in der Spule liegt
nach 3τ fließt 95%, nach 4τ fließt 98% und nach 5τ
fließt 100% von imax
nach 1τ noch 37%, nach 2τ noch 14%,
nach 3τ noch 5%, nach 4τ noch 2% von UR und nach
5τ keine Spannung mehr an.
Zeitkonstante:
L
R
R
L
L R R = Widerstand in Ω ; L = Induktivität in H; τ in s
Nach 5 τ fließt der maximale Strom imax:
imax
U0
R
R
U0
imax
U 0 R imax
U0 = maximale Spannung an der Spule
R = Widerstand in Ω
imax = maximaler Strom
Zu jedem Zeitpunkt gilt:
U 0 uR uL
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
72
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Berechnung zum Einschaltvorgang der Spule:
Spannung an der Spule:
u L t U 0 e
u L t U 0 e
u
t ln L
U0
t
u
L ln L
U0
t
R
t R
L
t
u
ln L
U0
u
L ln L
U0
R
t
L
t R
u
ln L
U0
Spannung um Widerstand:
u
t
t ln 1 R
u
U0
ln 1 R
U0
t
uR t U 0 1 e
uR t U 0 1 e
tR
L
u
u
L ln 1 R
L ln 1 R
U0
U0 R
t
R
t
L
t R
u
ln 1 R
U0
Strom:
it i max
t
1 e
it imax 1 e
i
t ln 1
i max
tR
L
i
L ln 1
i max
t
R
i
L ln 1
i max
R
t
L
t
i
ln 1
imax
t R
i
ln 1
imax
tE 5
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
73
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
U0 = Maximale Spannung an der Spule in V
uL(t) = Spannung an der Spule zum Zeitpunkt t in V
uR(t) = Spannung am Widerstand zum Zeitpunkt t in V
i(t) = Strom zum Zeitpunkt t in A
t = Zeitpunkt in s
τ = Zeitkonstante in s
R = Widerstand in Ω
L = Induktivität in H
tE = Zeit bis nahezu der maximale Strom fließt
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
74
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Berechnung zum Ausschaltvorgang der Spule:
Spannung der Spule:
u L t U 0 e
u L t U 0 e
u
t ln L
U0
t
u
u
L ln L
L ln L
U0
U0 R
t
R
t
tR
L
L
t
u
ln L
U0
t R
u
ln L
U0
Spannung um Widerstand:
u R t U 0 e
u R t U 0 e
t
t R
L
L
u
t ln R
U0
u
L ln R
U0
t
R
t
u
ln R
U0
u
L ln R
U0
R
t
t R
u
ln R
U0
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
75
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Strom:
it imax e
it imax e
i
t ln
imax
tR
L
i
L ln
imax
t
R
t
L
t
i
ln
imax
i
L ln
imax
R
t
t R
i
ln
imax
t A 5
U0 = Maximale Spannung an der Spule in V
uL(t) = Spannung an der Spule zum Zeitpunkt t in V
uR(t) = Spannung am Widerstand zum Zeitpunkt t in V
i(t) = Strom zum Zeitpunkt t in A
t = Zeitpunkt in s
τ = Zeitkonstante in s
R = Widerstand in Ω
L = Induktivität in H
tA = Zeit bis der Gegeninduktionsspanung der Spule abgeklungen ist
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
76
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Bestimmungsgrößen der Wechselstromtechnik:
Wechselspannung:
Eine Spannng die in regelmäßiger wiederkehrender Folge ihre Richtung und Polarität ändert, nennt man
Wechselspannung.
Periode:
Vorgang, der sich in gleicher Weise wiederholt.
Periodendauer T:
Zeit, die zum Ablauf einer Periode erforderlich ist.
Frequenz f:
Anzahl der Perioden (Schwingungen) pro Sekunde f
1
T
f 1 Hz
s
Augenblickswert u(t):
Der Augenblickswert u(t) (Momentanwert) ist der Spannungswert u zu einem bestimmten Zeitpunkt t.
Scheitelwert û:
Der Scheitelwert û wird auch als Amplitude, Höchstwert oder Maximalwert bezeichnet. Er ist der größte
Augenblickswert.
Spitze-Spitze-Wert uss, upp:
Der Spitze-Spitze-Wert wird auch als Peak-Peak-Wert bezeichnet. Er ist bei sinusförmigen reinen
Wechselspannungen doppelt so groß wie der Scheitelwert û
u ss 2 uˆ
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
77
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Linien- und Zeigerdiagramm:
Zeigerdiagramm
Liniendiagramm
Eine sinusförmige Wechselspannung lässt sich durch ein Zeiger- und Liniendiagramm dar-stellen.
Bei Zeigerdiagramm dreht sich der Zeiger mit konstanter Geschwindigkeit gegen den
Uhrzeigersinn
ut uˆ sin
u(t) = Momentanspannung in V
û = Scheitelspannung in V
φ = Winkel
Umrechnung Bogenmaß – Gradmaß:
360 ˆ 2
360 2
360
360 2
2
2
360
= Winkel im Gradmaß
= Winkel im Bogenmaß
Auswahl einiger Winkel und Bogenmaße:
0°
0
15°
12
30°
6
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
45°
4
60°
3
90°
2
180°
270°
3
2
360°
2
78
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Kreisfrequenz:
2 f
T
f
2
2
2
T
ω = Kreisfrequenz in
1
s
f = Frequenz in Hz
T = Periodendauer in s
Effektivwert (quadratischer Mittelwert) eines Wechelstrom:
I
iˆ
2
iˆ I 2
î = Scheitelwert des Stromes (der Wechselgröße)
I = Effektivwert des Wechselstromes (der Wechselgröße)
Phasenverschiebungswinkel φ:
u i
u i
i u
φ = Phasenverschiebungwinkel zwischen Strom u und Spannung i
φu = Nullphasenwinkel der Spannung u
φi = Nullphasenwinkel des Strom i
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
79
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Mathematische Darstellung einer sinusförmigen Wechselspannung:
Die sinusförmige Schwingung (Spannung) kann dargestellt werden:
in Abhängigkeit vom Phasenwinkel α im Gradmaß (!!! Taschenrechner auf DEG !!!):
u uˆ sin
uˆ
u
sin
sin
u
( 2 Lösungen !! : α° , 180°- α°)
uˆ
u(α°) = Momentanspannung in V
û = Scheitelwert der Spannung in V
α = Winkel im Gradmaß
in Abhängigkeit vom Phasenwinkel b im Bogenmaß (!!! Taschenrechner auf RAD !!!):
ub uˆ sin b
uˆ
u b
sin b
sin b
u b
( 2 Lösungen !! : b , - b)
uˆ
u(b) = Momentanspannung in V
û = Scheitelwert der Spannung in V
b = Winkel im Bogenmaß
in Abhängigkeit von der Zeit t (!!! Taschenrechner auf RAD !!!):
ut uˆ sin t
uˆ
u t
sin t
sin t
u t
T
( 2 Lösungen !! : t , - t)
uˆ
2
u(t) = Momentanspannung in V
û = Scheitelwert der Spannung in V
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
80
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
1
s
t = Zeit in s ; T = Periodendauer in s
ω = Kreisfrequenz in
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
81
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Ohmscher Widerstand an sinusförmiger Wechselspannung:
ut uˆ sin t
it iˆ sin t
uˆ
iˆ
u t
sin t
it
sin t
sin t
u t
T
( 2 Lösungen !! : t , - t)
uˆ
2
sin t
it
T
( 2 Lösungen !! : t , - t)
iˆ
2
Taschenrechner auf RAD umstellen !!
u(t) = Momentanwert der Spannung in V
û = Scheitelwert der Spannung in V
i(t) = Momentanwert des Stromes in A
î = Scheitelwert des Stromes in A
R = Widerstand in Ω
1
ω = Kreisfrequenz in
s
t = Zeit in s
T = Periodendauer in s
Liniendiagramm
Zeigerdiagramm
Phasenwinkel:
i u 0
Widerstand:
R
u t
U
uˆ
R
mit uˆ U 2 und iˆ I 2 R
it
I
iˆ
Der Widerstand ist im Wechselstromkreis nicht frequenzabhängig
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
82
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Spule an sinusförmiger Wechselspannung:
u t
u t iˆ L sin t iˆ
2
L sin t
2
it iˆ sin t
iˆ
it
sin t
sin t
L
u t
iˆ sin t
2
it
T
( 2 Lösungen !! : t , - t)
ˆi
2
Taschenrechner auf RAD umstellen !!
u(t) = Momentanwert der Spannung in V
û = Scheitelwert der Spannung in V
i(t) = Momentanwert des Stromes in A
î = Scheitelwert des Stromes in A
1
ω = Kreisfrequenz in
s
t = Zeit in s
L = Induktivität in H
Liniendiagramm
Zeigerdiagramm
Phasenverschiebungswinkel:
i t u t
2
2
90
Bei der idealen Spule eilt der Strom i der Spannung u um 90° nach !!
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
83
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Blindwiderstand XL:
XL L
X L 2 f L
XL
L
f
L
XL
2 L
L
XL
2 f
XL
2 f
XL = Blindwiderstand in Ω
L = Induktivität in H
f = Frequenz in Hz
Der Blindwiderstand ist frequenzabhängig. Er verhält sich proportional
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
84
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Kondensator an sinusförmiger Wechselspannung:
ut uˆ sin t
uˆ
u t
sin t
sin t
u t
T
( 2 Lösungen !! : t , - t)
uˆ
2
it
it
C
it uˆ C sin t uˆ
2
C sin t
uˆ sin t
2
2
Taschenrechner auf RAD umstellen !!
u(t) = Momentanwert der Spannung in V
û = Scheitelwert der Spannung in V
i(t) = Momentanwert des Stromes in A
î = Scheitelwert des Stromes in A
1
ω = Kreisfrequenz in
s
t = Zeit in s
C = Kondensator in F
Liniendiagramm
Zeigerdiagramm
Phasenverschiebungswinkel:
u t i t
2
2
90
Beim idealen Kondensator eilt der Strom i der Spannung u um 90° vor !!
Blindwiderstand XC:
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
85
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
XC
1
C
XC
1
2 f C
1
XC C
f
1
2 X C C
C
C
1
X C
2 f
1
X C 2 f
XC = Blindwiderstand in Ω
C = Kapazität in F
f = Frequenz in Hz
Der Blindwiderstand ist frequenzabhängig. Er verhält sich indirekt proportional
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
86
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Reihenschaltung R und L:
Spannungen:
UZ U R U L U Z U R U L
2
2
2
2
2
U R U Z U L U L U Z U R
2
tan
2
UL
UR
cos
2
2
UR
UZ
sin
UL
UZ
sin
XL
Z
Alle Spannungen in V
Widerstände:
Z 2 R2 X L Z R2 X L
2
R Z2 XL
tan
XL
R
2
2
X L Z 2 R2
cos
R
Z
Z = Scheinwiderstand (Impendanz) in Ω
R = Wirkwiderstand in Ω
XL = ind. Blindwiderstand in Ω
Leistung:
S 2 P 2 QL S P 2 QL
2
QL S 2 P 2 tan
2
2
QL
P
2
U
U
S Z I2 Z P R I2 R
Z
R
P S 2 QL
cos
2
P
S
sin
QL
S
2
U
QL L I 2 X L
XL
S = Scheinleistung in VA
QL = Blindleistung in var
P = Wirkleistung in W
cosφ = Leistungsfaktor
Beachte:
- Der Strom i ist in der Reihenschaltung überall gleich.
- Am Widerstand sind Spannung und Strom phasengleich
- An der Spule sind Spannung und Strom um +90° phasenverschoben.
i eilt uL um 90° nach
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
87
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
88
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Reihenschaltung R und C:
Spannungen:
U Z U R UC U Z U R UC
2
2
2
2
2
U R U Z UC UC U Z U R
2
UC
UR
tan
2
2
cos
2
UR
UZ
sin
UC
UZ
sin
XC
Z
Alle Spannungen in V
Widerstände:
Z 2 R2 X C Z R2 X C
2
R Z 2 XC
tan
XC
R
2
2
X C Z 2 R2
cos
R
Z
Z = Scheinwiderstand (Impendanz) in Ω
R = Wirkwiderstand in Ω
XC = kap. Blindwiderstand in Ω
Leistung:
S 2 P 2 QC S P 2 QC
2
QC S 2 P 2 tan
2
2
QC
P
2
U
U
S Z I2 Z P R I2 R
Z
R
P S 2 QC
cos
2
P
S
sin
QC
S
2
U
QC C I 2 X C
XL
S = Scheinleistung in VA
QC = Blindleistung in var
P = Wirkleistung in W
cosφ = Leistungsfaktor
Beachte:
- Der Strom i ist in der Reihenschaltung überall gleich.
- Am Widerstand sind Spannung und Strom phasengleich
- Am Kondensator sind Spannung und Strom um -90° phasenverschoben.
i eilt uC um 90° vor
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
89
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Parallelschaltung von R und L:
Ströme:
IZ IR IL IZ IR IL
2
2
tan
2
2
IL
IR
cos
2
IR
IZ
IR IZ IL
2
sin
2
IL
IZ
IL IZ IR
2
2
Alle Ströme in A
Leitwerte (Widerstände):
Y 2 G 2 BL Y G 2 BL
2
tan
BL
2
BL
G Z
R
cos
Y R
G XL
G Y 2 BL
sin
2
BL
Z
Y
XL
BL Y 2 G 2
Y
1
Z
G
1
R
1
XL
Y = Blindleitwert in S
G = Wirkleitwert in S
BL = ind. Blindleitwert in S
Leistung:
S 2 P 2 QL S P 2 QL
2
QL S 2 P 2 tan
S
2
P S 2 QL
QL
P
U2
U2
2
2
IZ Z P
IR R
Z
R
cos
QL
2
P
S
sin
QL
S
U2
2
IL X L
XL
S = Scheinleistung in VA
QL = Blindleistung in var
P = Wirkleistung in W
cosφ = Leistungsfaktor
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
90
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Beachte:
- Die Spannung u ist in der Parallelschaltung überall gleich.
- Am Widerstand sind Strom und Spannung phasengleich
- An der Spule sind Strom und Spannung um +90° phasenverschoben.
i eilt uL um 90° nach
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
91
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Parallelschaltung von R und C:
Ströme:
I Z I R IC I Z I R IC
2
2
tan
2
IC
IR
2
cos
2
I R I Z IC
2
IR
IZ
sin
2
IC
IZ
IC I Z I R
2
2
Alle Ströme in A
Widerstände:
Y 2 G 2 BC Y G 2 BC
2
tan
BC
2
BC
G Z
R
cos
Y R
G XC
G Y 2 BC
sin
2
BC
Z
Y
XC
BC Y 2 G 2
Y
1
Z
G
1
R
1
XC
Y = Blindleitwert in S
G = Wirkleitwert in S
BC = kap. Blindleitwert in S
Leistung:
S 2 P 2 QC S P 2 QC
2
QC S 2 P 2 tan
S
2
P S 2 QC
QC
P
U2
U2
2
2
IZ Z P
IR R
Z
R
cos
QC
2
P
S
sin
QC
S
U2
2
IC X C
XC
S = Scheinleistung in VA
QC = Blindleistung in var
P = Wirkleistung in W
cosφ = Leistungsfaktor
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
92
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Beachte:
- Die Spannung u ist in der Parallelschaltung überall gleich.
- Am Widerstand sind Spannung und Strom phasengleich
- Am Kondensator sind Spannung und Strom um -90° phasenverschoben.
i eilt uC um 90° vor
Blindleistungs-Kompensation:
Bei stark induktivlastigen Verbrauchern, z.B. Motoren wird durch Zuschaltung einer
Kapazität erreicht, dass die Blindleistung (=Energie) anstatt ins Netz
zum größten Teil in den Kondensator geführt wird. Sie pendelt nun
ständig zwischen Kapazität und Induktivität hin und her.
Vor Kompensation gilt: Q QL
QL P tan1 tan 1
QL
P
P
QL
tan 1
Nach Kompensation gilt: Q QL QC
Q P tan 2
C
P tan1 tan 2
U 2
C U 2
tan 2 tan1
P
P tan1 tan 2
U 2 C
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
tan 1
P
Q
P
C U 2
U
tan1 tan 2
P
Q
tan 1
P tan 1 tan 2
C
C U 2
tan 2
tan1
P
93
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
QL = induktive Blindleistung in var
QC = kapazitive Blindleistung in var
Q = Blindleistung nach Kompensation in var
P = Wirkleistung in W
φ1 = Phasenwinkel vor der Kompensation
φ2 = Phasenwinkel nach der Kompensation
C = Kapazität in F
U = Spannung in V
ω = Kreisfrequenz in Hz
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
94
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Komplexe Zahlen und deren Darstellung:
c a j b
c = c komplex
a = Realanteil von c ( auch Re {c} )
b = Imaginäranteil von c ( auch Im {c} )
Darstellungsformen:
1. Normalform (algebraische Schreibweise):
c a j b
2. Polarform ( trigonometrische Schreibweise ):
c a2 b2
|c| = Betrag (Länge) von c komplex
c c cos j sin
a c cos
b c sin
3. Eulersche Form ( Exponentialschreibweise ):
Nach Euler gilt: e j cos j sin
j
c c e
4. Versorform:
c c ( sprich: versor phi )
Als Taschenrechner kann man heute auch optimal den Laptop benutzen.
s.z.B. Mathcad
oder den Windows Taschenrechner !!
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
95
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Umrechnung komplexer Zahlen mit dem Taschenrechner:
Taschenrechner Sharp EL546R:
Mit 2ndF + Math + 1 den Taschenrechner in den Modus für komplexe Zahlen bringen.
Mit Math + 1 wird die Darstellung in der Versorform eingestellt. (r0-Anzeige im Display)
Mit Math + 2 wird die Darstellung in der Normalform eingestellt. (xy-Anzeige im Display)
Mit 2ndF + Exp wird zwischen der Anzeige des Realanteils und des Imaginäranteils von c bzw.
zwischen der Anzeige des Betrages und von c hin und her gewechselt.
Mit ab/c wird das j-Zeichen dargestellt. Mit D°M’S wird das Versor-Zeichen dargestellt.
Umrechnung Normalform Versorform:
- Taschenrechner auf Versorform einstellen ( Math + 1 )
- Komplexe Zahl in der Normalform eingeben und mit = betätigen (z.B. 3 + ab/c 2 = )
- Es wird der Betrag von c angezeigt
- Für 2ndF + Exp betätigen
Umrechnung Versorform Normalform:
- Taschenrechner auf Normalform einstellen ( Math + 1 )
- Komplexe Zahl in der Versorform eingeben und mit = betätigen (z.B. 3 D°M’S 2 2 = )
- Es wird der Realanteil von c angezeigt
- Für den Imaginäranteil 2ndF + Exp betätigen
Taschenrechner Casio fx 991 WA:
Mit Mode + 2 den Taschenrechner in den Modus für komplexe Zahlen bringen.
!!! Die Darstellung erfolgt immer in der Normalform !!! Keine Umstellung auf die Versorform im
komplexen Modus möglich.
Mit ENG wird das j-Zeichen dargestellt.
Betrag einer komplexen Zahl (z.B. 3 + j4) berechnen:
Shift ) ( 3 + 4 ENG ) = eingeben.
Winkel einer komplexen Zahl (z.B. 3 + j4) berechnen:
Shift ( ( 3 + 4 ENG ) = eingeben.
Umrechnungen zwischen der Versorform und der Normalform müssen über den Umweg
der Berechnung von Polarkoordinaten (Versorform) und der kartesischen Koordinaten
(Normalform) getätigt werden:
Mit Mode + 1 den Taschenrechner in den normalen Modus schalten.
Umrechnung kartesich (Normalform) polar (Versorform) (z.B. 3 + j4):
- Pol( 3 , 4 ) = eingeben und es wird der Betrag = Länge angezeigt.
- Der Winkel wird mit RCL tan angezeigt.
- Mit RCL cos wird der Betrag angezeigt.
Umrechnung polar (Versorform) kartesich (Normalform) (z.B. 365 ):
- Shift Pol( 3 , 65 ) = eingeben und es wird der Realanteil = x-Wert angezeigt.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
96
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
- Der Imaginäranteil = y-Wert wird mit RCL tan angezeigt.
- Mit RCL cos wird der Realanteil angezeigt.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
97
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Gleichheit von komplexen Zahlen:
Zwei komplexe Zahlen sind gleich, wenn ihre Realanteile und ihre Imaginäranteile gleich sind.
c a j b
c und d sind gleich, wenn a=e und b=f ist.
d e j f
Konjugiert komplexe Zahlen:
Die konjugiert komplexe Zahl wird gebildet, indem man
die komplexe Zahl an der reellen Achse spiegelt.
c = komplexe Zahl
c* = konjugiert komplexe Zahl
In der Normalform:
c a j b c* a j b
In der trigonometrischen Form:
c c cos j sin c* c cos j sin
In der Eulerschen Form:
c c e j c* c e j
In der Versorform:
c c c* c
Addition oder Subtraktion von komplexen Zahlen:
Zur Addition oder Subtraktion von komplexen Zahlen müssen diese in der Normalform
vorliegen !!!
Regel:
Zwei komplexe Zahlen werden addiert bzw. subtrahiert, indem man ihre Realanteile und ihre
Imaginäranteile addiert bzw. subtrahiert.
z1 a j b
z 1 z 2 a c j b d
z2 c j d
z 1 z 2 a c j b d
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
98
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Multiplikation oder Division von komplexen Zahlen:
Zur Multiplikation oder Division von komplexen Zahlen müssen dies in der Exponentialform
(Eulerform) oder in der Versorform vorliegen !!!
Regel:
- Zwei komplexe Zahlen werden multipliziert, indem man ihre Realanteile multipliziert und ihre
Imaginäranteile addiert.
- Zwei komplexe Zahlen werden dividiert, indem man ihre Realanteile dividiert und ihre
Imaginäranteile subtrahiert.
z 1 z 2 z 1 z 2 e j 1 2
z 1 z 1 e j 1
z2 z2 e
z1
z 1 e j 1
z1
e j 1 2
j 2
z2 z2 e
z2
j 2
z 1 z 2 z 1 z 2 1 2
z 1 z 1 1
z1
z1
1 2
z2 z2
z 2 z 2 2
Definition der Zahl j:
j 2 1
j 1
j3 j j4 1
j5 j
Multiplikation einer komplexen Zahl mit ihrer konjugiert komplexen Zahl:
Die Multiplikation einer komplexen Zahl mit ihrer konjugiert komplexen Zahl ergibt das Quadrat
des Betrages der komplexen Zahl.
z1 z1* z1
2
Es entsteht ein rein reelles Ergebnis !!
Inversion einer komplexen Zahl:
Inversion über die Euler- oder Versorform:
z1 z1 e j
1
1
1
1
1
e j
e j
j
z1 z1
z1 z1 e
z1
Inversion über Normalform und konjugiert komplexer Erweiterung:
z a j b
a j b a j b a j b
1
1
z a j b a j b
a2 b2
a2 b2
a2 b2
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
99
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
1
a
b
2
j 2
2
z a b
a b2
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
100
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Vereinbarungen für die Elektrotechnik:
U = komplexe Spannung
U* = konjugiert komplexe Spannung
|U| = U = Betrag der Spannung ( Effektivwert )
φU = Nullphasenwinkel der Spannung
I = komplexer Strom
I* = konjugiert komplexer Strom
|I| = I = Betrag des Stromes ( Effektivwert )
φI = Nullphasenwinkel des Stromes
Grundzweipole in komplexer Darstellung:
Scheinwiderstand Z (Impendanz)
Widerst.
Scheinleitwert Y
Normal
Exponentia
l
Versor
Normal
Exponentia
l
Versor
R
R e j 0
R0
G
G e j 0
G0
1
e j 90
L
1
90
L
1
1
L
jL
L e
j 90
L90
jX L
X L e j 90
X L 90
jB L
BL e j 90
BL 90
1
1
j
jC
C
1
e j 90
C
1
90
C
jC
C e j 90
C90
jX C
X C e j 90
X C 90
jBC
BC e j 90
BC 90
jL
j
Spule
Kondens.
2 f
R = Widerstand in Ω
G = Leitwert in S
L = Induktivität in H
XL = induktiver Blindwiderstand in Ω
BL = induktiver Blindleitwert in Ω
C = Kapazität in F
XC = kapazitiver Blindwiderstand in Ω
BC = kapazitiver Blindleitwert in Ω
1
ω = Kreisfrequenz in
s
f = Frequenz in Hz
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
101
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Komplexe Widerstände:
Z
U
I
Z
U e jU
I e j I
Z
I
U
Z
U I Z
mit U I
U
e j Z Z e j
I
Z Z Z Z cos j sin
Z R jX
Z = komplexer Widerstand in Ω
U = komplexe Spannung in V
I = komplexer Strom in A
φ = Winkel in °
φU = Spannungs-Nullphasenwinkel in °
φI = Strom-Nullphasenwinkel in °
U = Spannung in V (Betrag von U)
I = Strom in A (Betrag von I)
R = Wirkwiderstand in Ω
X = Scheinwiderstand in Ω
Komplexe Leistung:
S P jQ
S S e j
S U I *
cos
S Z I2
S
P
S
S S cos j sin
sin
Q
S
U2
Z*
Die komplexe Leistung errechnet sich aus dem Produkt der komplexen Spannung und des
konjugiert komplexen Stromes.
S = komplexe Leistung
P = Wirkleistung in W
Q = Blindleistung in var
cosφ = Leistungsfaktor
sinφ = Blindfaktor
U = komplexe Spannung
I* = konjugiert komplexer Strom
U = Spannung in V (Betrag von U)
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
102
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
I = Strom in A (Betrag von I)
Z = komplexer Widerstand in Ω
Z* = konjugiert komplexer Widerstand in Ω
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
103
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Reihenschaltung komplexer Widerstände:
Z 1 R1 j X 1
Z g Z1 Z 2
Z 2 R2 j X 2
Z g R1 R2 j X 1 X 2
U U 1 U 2 U 1 I Z1
U2 I Z2
Zg = komplexer Gesamtscheinwiderstand in Ω
Z1 , Z2 = komplexe Teilscheinwiderstände in Ω
R1, R2 = Teilwirkwiderstände in Ω
X1, X2 = Teilblindwiderstände in Ω
U = komplexe Gesamtspannung in V
I = komplexer Strom in A
Parallelschaltung komplexer Widerstände:
Y
1
Z
G
1
R
B
1
X
I2
U
U Y 2
Z2
Y g Y 1 Y 2 Y 3 Y 1 G1 j B1
Y 2 G2 j B2 Y 3 G3 j B3
Y g G1 G2 G3 j B1 B2 B3
I I1 I 2 I 3 I1
I3
U
U Y 1
Z1
U
U Y 3
Z3
Y = komplexer Gesamtscheinleitwert in S
Y1, Y2, Y3 = komplexe Teilscheinleitwerte in S
G1, G2, G3 = komplexe Teilwirkleitwerte in S
B1, B2, B3 = komplexe Teilblindleitwerte in S
U = komplexe Gesamtspannung in V
I = komplexer Strom in A
Umwandlung komplexe Reihenschaltung in komplexe Parallelschaltung:
Für die Umwandlung gilt:
Z r Z p und r p und f r f p
Verfahren der Umwandlung:
- Zg der Reihenschaltung berechnen
und in Versorform umwandeln
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
104
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
1
) und
Zg
in Normalform umwandeln. Man erhält
die Teil-Leitwerte (G und B).
- Yg von Zg berechnen ( Y g
- Aus den Teil-Leitwerten die Werte der Bauteile berechnen.
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
105
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Umwandlung komplexe Parallelschaltung in komplexe Reihenschaltung:
Für die Umwandlung gilt:
Z p Z r und p r und f p f r
Verfahren der Umwandlung:
- Yg der Parallelschaltung berechnen
und in Versorform umwandeln
1
- Zg von Yg berechnen ( Z g
) und
Yg
in Normalform umwandeln. Man erhält
die Teil-Widerstände (R und X).
- Aus den Teil-Widerständen die Werte der Bauteile berechnen.
Resonanz:
Von Resonanz wird gesprochen, wenn der imaginäre Anteil des Scheinwiderstandes Z
(Blindwiderstand jX bzw. der Blindleitwert jB) eines Netzwerkes 0 ist. φ = 0° !!
Die Frequenz, bei der dieser Zustand zutrifft, nennt man Resonanzfrequenz f r oder f0 bzw.
Resonanzkreisfrequenz ωr oder ω0 . Bei Resonanz ist der Scheinwiderstand Z bzw. der
Scheinleitwert Y des Netzwerkes rein reell !!
Reihenresonanz:
fr
L
1
2 L C
r
1
LC
1
1
L 2
2
2 f r C
r C
C
1
2 f r 2 L
C
1
r L
2
Bei Resonanz heben sich UL und UC gegenseitig auf, da sie im Betrag gleich groß und um 180°
phasenverschoben sind. Allerdings kann die Spannung an den Bauteilen höher als die
Gesamtspannung U sein (Spannungsüberhöhung)!!
U L UC r L
1
U
U
R
r C R
L
U L UC
r L U
R
U L R UC R
U r U r
U
r C R
C
U
U
U L r R UC r R
fr = Resonanzfrequenz in Hz ; ωr = Resonanzkreisfrequenz in Hz
R = Widerstand in Ω ; L = Induktivität in H ; C = Kapazität in F
U = UR = Spannung am Widerstand in V (Betrag von U = UR)
UL = Spannung an der Spule in V (Betrag von UL)
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
106
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
UC = Spannung am Kondensator in V (Betrag von UC)
U L UC
= Spannungsüberhöhung (Faktor !!)
U
U
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
107
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Parallelresonanz:
fr
1
2 L C
r
1
LC
L
1
1
L 2
2
2 f r C
r C
C
1
1
C 2
2
2 f r L
r L
Bei Resonanz heben sich IL und IC gegenseitig auf, da sie im Betrag gleich groß und um 180°
phasenverschoben sind. Allerdings kann der Strom durch die Bauteile höher als der
Gesamtstrom I sein (Stromüberhöhung)!!
I L IC
R
r C R
I
I r L
L
I L IC
I R
I R
I L r IC r
RI
r C R I
r L
C
IL
I r R
IC
I r R
fr = Resonanzfrequenz in Hz
ωr = Resonanzkreisfrequenz in Hz
R = Widerstand in Ω
L = Induktivität in H
C = Kapazität in F
I = IR = Strom durch Widerstand in V (Betrag von IR)
IL = Strom durch die Spule in V (Betrag von IL)
IC = Strom durch den Kondensator in V (Betrag von IC)
I L IC
= Stromüberhöhung (Faktor !!)
I
I
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
108
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Dämpfung:
D
Pe
Pa
Pa
Pe
D
Pe D Pa
D = Dämpfung (Ohne Einheit !!)
Pe = Eingangsleistung in W
Pa = Ausgangsleisung in W
Dämpfungsmaß:
a 10 lg
a
Pe
Pa
Pe Pa 1010
Pe
Pa
10
a
10
Pe 10
a
10
Bei Anpassung (Re = Ra) gilt:
a 20 lg
a
Ue
Ua
Ua
U e U a 10 20
Ue
10
a 20 lg
a
20
U e 10
a
20
a
Ie
Ia
Ia
I e I a 10 20
Ie
10
a
20
I e 10
a
20
a = Dämpfungsmaß in dB
Pe = Eingangsleistung in W
Pa = Ausgangsleistung in W
Re = Eingangswiderstand in Ω
Ra = Ausgangswiderstand in Ω
Ue = Eingangsspannung in V
Ua = Ausgangsspannung in V
Ie = Eingangsstrom in A
Ia = Ausgangsstrom in A
Wenn Pa 0,707 Pe entspricht das einer Dämpfung von -3 dB
Das gesamte Dämpfungsmaß ist die Summer der Einzeldämpfungsmaße:
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
109
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
a g a12 a23 a34
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
110
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Komplexe Übertragungsfunktion allgemein:
F j
Ua
Ue
Ue
U a F j U e
Ua
F j
F(jω) = komplexe Übertragungsfunktion (Ohne Einheit !!)
Ua = komplexe Ausgangsspannung in V
Ue = komplexe Eingangsspannung in V
Amplituden-Frequenzgang allgemein:
F j
Ua
Ue
Ua
Ue
Ue
Ua
F j
U a F j U e
|F(jω)| = Betrag der komplexe Übertragungsfunktion (Ohne Einheit !!)
|Ua| = Ua Betrag der komplexen Ausgangsspannung = Effektivwert der Ausgangsspg. in V
|Ue| = Ue Betrag der komplexen Eingangsspannung = Effektivwert der Eingangsspg. in V
Phasen-Frequenzgang allgemein:
ImF ( j
ReF ( j
j arctan
φ(jω) = Phasenwinkel der komplexen Übertragungsfunktion
Im{F(jω)} = Imaginäranteil der komplexen Übertragungsfunktion
Re{F(jω)} = Realanteil der komplexen Übertragungsfunktion
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
111
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Komplexe Übertragungsfunktion für RC-Tiefpaß:
1
F j
1
j C
1
1 j R C
R
j C
F j
1
R C
j
2
2
1 R C
1 R C
Amplituden-Frequenzgang:
Der Amplituden-Frequenzgang ist der Betrag der Übertragungsfunktion.
F j
1
1 R C
2
1
F j dB 20 lg
1 R C 2
für ω 0 |F(jω)| 1 |Ua| = |Ue|
für ω |F(jω)| 0 |Ua| 0
Phasen-Frequenzgang:
Der Phasen-Frequenzgang ist die Phasendifferenz zwischen Ausgangsspannung und
Eingangsspannung.
j arctan R C tan 1 R C
für ω = 0 φ(jω) = 0 Ua hat gleiche Phasenlage wie Ue
für ω φ(jω) = -90° Ua eilt Ue um 90° nach
Grenzfrequenz:
Bei Grenzfrequenz fg bzw. ωg ist der Wert des Amplituden-Frequenzganges (also der Betrag der
1
Übertragungsfunktion) gleich 0,707
. Das entspricht –3dB.
2
1
1
1
R
g
fg
2 f g C
RC
2 R C
C
1
2 R f g
Phasenwinkel bei Grenzfrequenz:
j g 45 Ua eilt Ue um 45° nach
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
112
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Komplexe Übertragungsfunktion für RC-Hochpaß:
F j
F j
R
R
1
j C
j R C
1 j R C
R C 2 j R C
2
2
1 R C
1 R C
Amplituden-Frequenzgang:
Der Amplituden-Frequenzgang ist der Betrag der Übertragungsfunktion.
F j
RC
1 R C
2
RC
F j dB 20 lg
1 R C 2
für ω 0 |F(jω)| 0 |Ua| 0
für ω |F(jω)| 1 |Ua| = |Ue|
Phasen-Frequenzgang:
Der Phasen-Frequenzgang ist die Phasendifferenz zwischen Ausgangsspannung und
Eingangsspannung.
1
1
1
tan
RC
RC
j arctan
für ω = 0 φ(jω) = +90° Ua eilt Ue um 90° vor
für ω φ(jω) = 0° Ua hat gleiche Phasenlage wie Ue
Grenzfrequenz:
Bei Grenzfrequenz fg bzw. ωg ist der Wert des Amplituden-Frequenzganges (also der Betrag der
1
Übertragungsfunktion) gleich 0,707
. Das entspricht –3dB.
2
1
1
1
R
g
fg
2 f g C
RC
2 R C
C
1
2 R f g
Phasenwinkel bei Grenzfrequenz:
j g 45 Ua eilt Ue um 45° vor
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
113
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Komplexe Übertragungsfunktion für RL-Tiefpaß:
F j
R
1
R j L 1 j L
R
L
1
R
F j
j
2
2
L
L
1
1
R
R
F j
R2
R L
2
2
j
RL
2
R L
2
Amplituden-Frequenzgang:
Der Amplituden-Frequenzgang ist der Betrag der Übertragungsfunktion.
F j
F j
1
L
1
R
2
R
F j dB 20 lg
R 2 L 2
R
R 2 L
2
für ω 0 |F(jω)| 1 |Ua| = |Ue|
für ω |F(jω)| 0 |Ua| 0
Phasen-Frequenzgang:
Der Phasen-Frequenzgang ist die Phasendifferenz zwischen Ausgangsspannung und
Eingangsspannung.
L
R
L
R
j arctan tan 1
für ω = 0 φ(jω) = 0 Ua hat gleiche Phasenlage wie Ue
für ω φ(jω) = -90° Ua eilt Ue um 90° nach
Grenzfrequenz:
Bei Grenzfrequenz fg bzw. ωg ist der Wert des Amplituden-Frequenzganges (also der Betrag der
1
Übertragungsfunktion) gleich 0,707
. Das entspricht –3dB.
2
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
114
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
g
R
R
fg
L
2 L
R
L
2 f g
R f g 2 L
Phasenwinkel bei Grenzfrequenz:
j g 45 Ua eilt Ue um 45° nach
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
115
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Komplexe Übertragungsfunktion für RL-Hochpaß:
F j
j L
1
R j L 1 j R
L
R
1
L
F j
j
2
2
R
R
1
1
L
L
L 2
RL
F j 2
j 2
2
2
R L
R L
Amplituden-Frequenzgang:
Der Amplituden-Frequenzgang ist der Betrag der Übertragungsfunktion.
F j
F j
1
R
1
L
2
L
F j dB 20 lg
R 2 L 2
L
R 2 L
2
für ω 0 |F(jω)| 0 |Ua| 0
für ω |F(jω)| 1 |Ua| = |Ue|
Phasen-Frequenzgang:
Der Phasen-Frequenzgang ist die Phasendifferenz zwischen Ausgangsspannung und
Eingangsspannung.
R
R
1
tan
L
L
j arctan
für ω = 0 φ(jω) = +90° Ua eilt Ue um 90° vor
für ω φ(jω) = 0° Ua hat gleiche Phasenlage wie Ue
Grenzfrequenz:
Bei Grenzfrequenz fg bzw. ωg ist der Wert des Amplituden-Frequenzganges (also der Betrag der
1
Übertragungsfunktion) gleich 0,707
. Das entspricht –3dB.
2
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
116
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
g
R
R
fg
L
2 L
R
L
2 f g
R f g 2 L
Phasenwinkel bei Grenzfrequenz:
j g 45 Ua eilt Ue um 45° vor
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
117
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Frequenznormierte Darstellung der Übertragungsfunktionen (Bode-Diagramm):
Durch die Frequenznormierung erreicht man, das die Darstellung aller Tief- oder Hochpässe
gleich ist und in Abhängigkeit der Grenzfrequenz erfolgt.
Normierung:
f
fg
fg
f
f fg
g
g
g
Ω = normierte Frequenz (Ohne Einheit)
f = Frequenz in Hz
fg = Grenzfrequenz in Hz
1
ω = Kreisfrequenz in
s
1
ωg = Grenzkreisfrequenz in
s
Tiefpass:
Normierter Amplituden-Frequenzgang:
F j
1
F j dB 20 lg
2
1
1
1 2
f
fg g
F j
2
1
F j dB
10
f
10
fg g
1
Normierter Phasen-Frequenzgang:
j arctan tan 1
Hochpass:
Normierter Amplituden-Frequenzgang:
F j
F j dB 20 lg
2
1
1 2
F j
f
2
fg g
1 F j
2
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
f
fg g
F j dB
10 10
F j dB
1 - 10 10
118
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Normierter Phasen-Frequenzgang:
1
1 1
tan
j arctan
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
119
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Bode-Diagramme für Tiefpass:
Normierter Amplituden-Frequenzgang:
1
0,9
0,8
0,7
0,6
F j
0,5
0,4
0,3
0,2
0,1
0
0,01
0,1
1
10
100
1000
Ω
Normierter Amplituden-Frequenzgang in dB:
0,01
0,1
1
10
100
Ω
1000
0
-10
-20
F j dB
-30
-40
-50
-60
-70
Normierter Phasen-Frequenzgang:
0,01
0,1
1
10
100
1000
Ω
0
-10
-20
-30
j
-40
-50
-60
-70
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
-80
-90
120
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Bode-Diagramme für Hochpass:
Normierter Amplituden-Frequenzgang:
1
0,9
0,8
0,7
0,6
F j
0,5
0,4
0,3
0,2
0,1
0
0,001
0,01
0,1
1
10
100
Ω
Normierter Amplituden-Frequenzgang in dB:
0,001
0,01
0,1
1
10
100
Ω
0
-10
-20
F j dB
-30
-40
-50
-60
-70
Normierter Phasen-Frequenzgang:
90
80
70
60
50
40
j 30
20
10
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
121
0
0,001
0,01
0,1
1
10
100
AK-Automatisierungs und Kommunikationstechnik – TI – Technische Informatik
NWT – Netzwerktechnik – www.munz-udo.de
Ω
C:\Users\Udo\Desktop\Schule\Formelsammlung\Elektrotechnik.doc
122