17 Der starre K¨orper
Werbung

17 Der starre Körper
Unter einem starren Körper verstehen wir ein ausgedehntes Objekt, das sich frei im Raum bewegen und
drehen kann, seine Form dabei aber nicht verändert. Etwas genauer formuliert, die Verteilung der Masse
im Innern des Körpers soll sich zeitlich nicht verändern. Von der Mechanik der Punktteilchen ausgehend,
können wir uns vorstellen, dass es sich dabei um ein System von vielen Teilchen handelt, deren Abstände
zueinander durch Zwangskräfte festgehalten werden.
Als einfachstes Beispiel für einen solchen idealisierten starren Körper kennen wir bereits die Hantel aus
Abbildung 5.3. Wir können uns also vorstellen, dass die einzelnen Teilchen durch ‘virtuelle Stangen’ zusammengehalten werden, die den Abstand von jeweils zwei Teilchen fixieren. Die einzigen verbleibenden
Bewegungen sind dann eine Verschiebung des ganzen Körpers im Raum, oder die Drehung des Körpers
um eine Achse.
Das Ziel dieses Kapitels ist es, die Bewegungsgleichungen für einen starren Körper aufzustellen und
seine wichtigsten mechanischen Eigenschaften zu verstehen.
Geschwindigkeit und Winkelgeschwindigkeit
Um den Ort festzulegen, an dem sich ein starrer Körpers im Raum befindet, denken wir uns einen speziell
ausgewählten Punkt in dem Körper als Bezugspunkt markiert. Wie wir gleich sehen werden, vereinfachen
sich die meisten Gleichungen erheblich, wenn wir den Schwerpunkt als Bezugspunkt verwenden. Wir
legen uns aber an dieser Stelle noch nicht fest. Den Ort, an dem sich der Bezugspunkt zur Zeit t im Raum
befindet, bezeichnen wir mit r(t).
Zusätzlich müssen wir noch die genaue Lage des Körpers im Raum festlegen. Dazu denken wir uns
zusätzlich zum Bezugspunkt noch drei orthogonale Einheitsvektoren an den Körper angeheftet. Wie in
Abbildung 17.1(a) gezeigt, bezeichnen wir diese Vektoren mit n a , wobei der Index a die Werte {1, 2, 3}
annimmt. Sie sollen eine positiv orientierte Orthonormalbasis bilden. Es gilt also
na · nb = δab ,
na × nb = εabc nc .
(17.1)
Für die Vektorindizes a, b, c, . . . gelten die üblichen Regeln. Über doppelt vorkommende Indizes ist jeweils
zu summieren, mit δab wird das Kronecker-Symbol bezeichnet, und mit εabc das Levi-Civita-Symbol, dessen Vorzeichen durch ε123 = 1 festgelegt ist.
Wenn sich der Körper bewegt, so sind im allgemeinen auch die Vektoren n a Funktionen der Zeit. Umgekehrt bestimmen diese Vektoren die Lage des Körpers eindeutig, so dass wir aus den Funktionen n a (t)
die Rotationsbewegung des Körpers ablesen können. Daraus ergibt sich die folgende Beschreibung der
Bewegung eines starren Körpers im Raum:
Die Bahn eines starren Körpers wird durch die Angabe des Ortes r(t) des körperfesten Bezugspunktes sowie der körperfesten Basis na (t) zu jedem Zeitpunkt beschrieben.
Damit haben wir ein Beschreibung des Konfigurationsraumes eines starren Körpers angegeben. Um die
Bewegungsgleichungen aufzustellen, müssen wir die zeitlichen Änderungen dieser Größen betrachten.
Unter der Geschwindigkeit v(t) des Körpers verstehen wir einfach die Zeitableitung von r(t), also die
Geschwindigkeit des Bezugspunktes,
v(t) = ṙ(t).
(17.2)
Um die Ableitung der Basis na nach der Zeit zu berechnen, müssen wir beachten, dass es sich zu jeden
Zeitpunkt um eine Orthonormalbasis handelt. Die Gleichung (17.1) gilt zu jeder Zeit t. Folglich gilt für
die Ableitungen der Basisvektoren na nach der Zeit
na · ṅb + ṅa · nb = 0.
185
(17.3)
replacements
(c)
(d)
z
z
ω
n1
n3
ez
ṅ3
ṅ1
y
y
ṅ2
n2
ey
x
ex
x
(b)
(a)
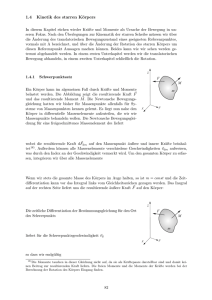
Abbildung 17.1: Die Lage eines starren Körpers im Raum wird durch die Angabe einer Orthonormalbasis
na definiert, die fest mit dem Körper verbunden ist (a). Rotiert der Körper, so ist deren Zeitableitung ṅa
durch das Kreuzprodukt mit der Winkelgeschwindigkeit ω gegeben (b).
Das ergibt sich unmittelbar aus (17.1), wenn man beide Seiten nach der Zeit ableitet. Wir wollen zeigen,
dass es einen eindeutig bestimmten Vektor ω gibt, mit der Eigenschaft
ṅa = ω × na .
(17.4)
Der Vektor ω, der im allgemeinen natürlich auch von der Zeit abhängt, wird als Winkelgeschwindigkeit
bezeichnet. Die Zeitableitungen ṅa der Basisvektoren stehen senkrecht zu den jeweiligen Basisvektoren
und zur Winkelgeschwindigkeit. Wie man in Abbildung 17.1(b) erkennen kann, führt der Körper eine
Rechtsdrehung um eine Achse aus, die in die Richtung von ω zeigt.
Wir beweisen zuerst, dass der Vektor ω durch (17.4) eindeutig bestimmt ist. Dazu multiplizieren wir
diese Gleichung skalar mit εabc nb , wobei dann über a und b zu summieren ist. Das ergibt
εabc ṅa · nb = εabc (ω × na ) · nb = εabc (na × nb ) · ω
= εabc εabd nd · ω = εabc εabd ωd = 2 ωc .
(17.5)
Hier haben wir zuerst die zyklische Eigenschaft des Spatproduktes verwendet, dann das Kreuzprodukt der
Basisvektoren ausgewertet, und schließlich haben wir benutzt, dass die Vektoren n a eine Orthonormalbasis
bilden, und den Vektor ω bezüglich dieser Basis in seine Komponenten zerlegt. Es folgt somit aus (17.4)
ω = ω a na ,
mit ωa = ω · na =
1
εabc ṅb · nc .
2
(17.6)
Nun müssen wir noch zeigen, dass dieser Vektor auch tatsächlich die Gleichung (17.4) erfüllt. Einsetzen
ergibt
1
1
ω × nd = ωa na × nd = εabc (ṅb · nc ) na × nd = εabc εade (ṅb · nc ) ne
2
2
1
1
(17.7)
= (δbd δce − δbe δcd ) (ṅb · nc ) ne = (ṅd · ne − ṅe · nd ) ne .
2
2
186
Addieren wir zu dem Ausdruck in der Klammer die Hälfte der linken Seite von (17.3), so ergibt sich
ω × nd = (ṅd · ne ) ne = ṅd .
(17.8)
Die letzte Gleichung folgt wieder aus der Tatsache, dass die Vektoren n e eine Orthonormalbasis bilden.
Das Ergebnis fassen wir wie folgt zusammen:
Der Bewegungszustand eines starren Körpers wird durch den Ort r und die Geschwindigkeit
v des Bezugspunktes, sowie die Orthonormalbasis na und die Winkelgeschwindigkeit ω
festgelegt.
Wie wir aus der Mechanik der Punktteilchen wissen, legen die Bewegungsgleichung die zeitliche Entwicklung eines Systems fest, sobald wir den Bewegungszustand, also die Orte und Geschwindigkeiten
aller Teilchen, zu einem Zeitpunkt kennen. Wir werden jetzt zeigen, dass es sich bei den angegebenen
Größen um die entsprechenden Bewegungsgrößen eines starren Körpers handelt.
Aufgabe 17.1 Wieviele unabhängige reelle Zahlen muss man festlegen, um den Bewegungszustand eines
starren Körpers eindeutig zu bestimmen?
Das körperfeste Koordinatensystem
Im folgenden ist es nützlich, sich den starren Körper als ein System von Punktteilchen vorzustellen. Die
Teilchen sollen durch Zwangskräfte so aneinander gebunden sein, dass sich der Körper als ganzes frei
bewegen, aber seine Form dabei nicht verändern kann. Konkret können wir uns vorstellen, dass zwischen
jeweils zwei Teilchen eine Zwangskraft wirkt, die den Abstand der beiden Teilchen fixiert. Als einfachstes
Beispiel für einen solchen idealisierten starren Körper hatten bereits die Hantel in Abbildung 5.3 kennen
gelernt. Ein etwas anspruchsvolleres Beispiel war das Rad aus Kapitel 12. Nun wollen wir eine ganz
allgemeine Anordnung von Punktteilchen betrachten.
Aufgabe 17.2 Man stelle sich den Körper aus N Teilchen aufgebaut vor, die durch virtuelle Stangen
miteinander verbunden sind. Wieviele solcher Stangen sind mindestens erforderlich, um den K örper
vollständig starr zu machen?
Wie üblich nummerieren wir die Teilchen mit einem Index α durch, und bezeichnen den Ort des Teilchens
α zur Zeit t mit rα (t). Jedes Teilchen nimmt dann einen festen Ort innerhalb des Körpers ein. Wenn wir
den Abstandsvektor uα = rα − r des Teilchens vom Bezugspunkt bezüglich der körperfesten Basis n a in
seine Komponenten zerlegen, so sind diese Komponenten zeitlich konstant. Es gilt also
rα (t) = r(t) + uα (t) = r(t) + uα,a na (t),
(17.9)
wobei die körperfesten Koordinaten uα,a des Teilchens nicht von der Zeit abhängen. Wir können dabei
den Bezugspunkt als Ursprung, und die Vektoren na als die Basis eines kartesischen Koordinatensystems
betrachten.
Durch den Bezugspunkt r und die Basis na wird ein körperfestes Koordinatensystem definiert, in dem die Position jedes Teilchen innerhalb des Körpers durch zeitunabh ängige Koordinaten festgelegt ist.
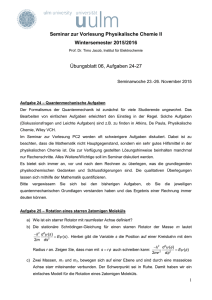
Dieser Sachverhalt ist in Abbildung 17.2(a) dargestellt. Das Teilchen befindet sich am Ort r α innerhalb
des Körpers. Der Vektor uα ist der Ortsvektor des Teilchens relativ zum Bezugspunkt r. Seine Komponenten uα,a bezüglich der Basis na ergeben sich als die Projektionen auf die mit {1, 2, 3} bezeichneten
187
(c)
(d)
pα
1
z
rα
y
3
uα × p α
1
rα
uα
uα
r
r
3
o
2
2
(a)
(b)
x
Abbildung 17.2: Die körperfesten und damit zeitunabhängigen Koordinaten u α,a des Teilchens α sind die
Komponenten des Abstandsvektors u = r α − r vom Bezugspunkt, dargestellt bezüglich der körperfesten
Basis na (a). Jedes Teilchen trägt mit seinem Impuls p α zu Gesamtimpuls bei und mit dem Kreuzprodukt
uα × pα zum inneren Drehimpuls (b).
Koordinatenachsen. Da sich sowohl der Bezugspunkt als auch diese Koordinatenachsen mit dem Körper
mitbewegen, sind die Koordinaten uα,a des Teilchens zeitlich unveränderlich.
Nun können wir leicht zeigen, dass wir den Bewegungszustand jedes einzelnen Teilchens aus den oben
definierten Bewegungsgrößen des starren Körpers bestimmen können. Der Ort ist durch (17.9) gegeben,
und die Geschwindigkeit des Teilchens ergibt sich zu
vα (t) = ṙα (t) = ṙ(t) + uα,a ṅa (t) = v(t) + uα,a ω(t) × na (t).
(17.10)
Die Geschwindigkeiten der einzelnen Teilchen lassen sich folglich durch die Geschwindigkeit v und die
Winkelgeschwindigkeit ω des Körpers ausdrücken, die im allgemeinen ebenfalls Funktionen der Zeit sind.
Die Kenntnis der Bewegungsgrößen r, na , v und ω reicht somit aus, um den Bewegungszustand jedes
Teilchens zu bestimmen, sobald wir die körperfesten Koordinaten u α,a des Teilchens kennen.
In diesem Sinne legen die Koordinaten uα,a der Teilchen den inneren Aufbau des Körpers fest, während
die Bewegungsgrößen seine Bewegung im Raum beschreiben. Wie wir gleich sehen werden, gehören zum
inneren Aufbau das Körpers noch andere Daten, wie zum Beispiel die Massen m α der einzelnen Teilchen,
oder deren Ladungen qα , wenn es sich um einen geladen Körper handelt. Entscheidend ist, dass diese
Größen zeitlich unveränderlich sind.
Nur die Bewegungsgrößen hängen von der Zeit ab. Für sie müssen wir die Bewegungsgleichungen
aufstellen, wenn die die Bewegungen eines starren Körpers berechnen wollen. Bevor wir dies tun, wollen
wir uns noch kurz überlegen, wie wir eine solche Bewegung explizit, also letztlich numerisch beschreiben
können. Dazu müssen wir zusätzlich ein raumfestes Koordinatensystem einführen, auf welches wir die
Darstellung der Bahn beziehen.
Wie üblich bezeichnen wir den Ursprung dieses Koordinatensystems mit o, und die Basis mit e i , wobei
der Index i die Werte {x, y, z} annimmt. Ort und Geschwindigkeit des Bezugspunktes lassen sich dann
durch ihre Koordinaten bzw. Komponenten bezüglich dieses Koordinatensystems ausdrücken,
r(t) = o + ri (t) ei ,
v(t) = vi (t) ei ,
mit vi (t) = ṙi (t).
(17.11)
Dasselbe gilt für die Basisvektoren na . Sie lassen sich als Linearkombination der Basisvektoren ei schreiben, wobei die Koeffizienten zeitabhängig sind. Da es sich um zwei Orthonormalbasen handelt, bilden die
188
Koeffizienten zu jedem Zeitpunkt eine orthogonale Matrix. Es gilt also
na (t) = Λai (t) ei ,
mit Λai (t) Λbi (t) = δab .
(17.12)
Diese Beziehung lässt sich auch umgekehrt schreiben, indem man die raumfesten Basisvektoren als Linearkombination der körperfesten darstellt,
ei = Λai (t) na (t),
mit Λai (t) Λaj (t) = δij .
(17.13)
In einer expliziten Darstellung der Bewegung eines starren Körpers sind es also nicht drei Vektoren, die als
Variable auftreten, sondern genau genommen eine orthogonale Transformation, die die raumfeste Basis
ei auf die körperfeste Basis na abbildet und dadurch die Lage des Körpers festlegt. Wenn sich der Körper
dreht, hängt diese Transformation natürlich von der Zeit ab.
Schließlich können wir auch noch die Winkelgeschwindigkeit in ihre Komponenten zerlegen, und zwar
wahlweise bezüglich der raumfesten oder der körperfesten Basis,
ω(t) = ωi (t) ei = ωa (t) na (t).
(17.14)
Weiter oben hatten wir bereits die Komponenten ωa benutzt, um die Existenz einer Winkelgeschwindigkeit
zu beweisen. Welche der beiden Darstellungen nützlicher ist, die körperfeste oder die raumfeste, hängt oft
von dem jeweils gestellten Problem ab. Wir können sie jederzeit ineinander umrechnen, denn aus (17.12)
und (17.13) folgt die entsprechende Umrechnungsformel für die Komponenten,
ωa (t) = Λai (t) ωi (t)
bzw. ωi (t) = Λai (t) ωa (t).
(17.15)
Aufgabe 17.3 Man zeige, dass sich die Zeitableitungen der Übergangsmatrizen wie folgt durch die Komponenten der Winkelgeschwindigkeit ausdrücken lassen,
Λ̇ai = εijk ωj Λak = εabc Λbi ωc ,
(17.16)
und dass sich daraus umgekehrt die folgenden Ausdrücke für die Komponenten der Winkelgeschwindigkeit
ergeben,
ωa =??εabc Λbi Λ̇ci ,
ωi =??εijk Λ̇aj Λak ,
(17.17)
Masse, Impuls und Kraft
Zur Herleitung der Bewegungsgleichungen für den starren Körper sind zwei Größen von zentraler Bedeutung, nämlich der Gesamtimpuls und der innere Drehimpuls des Körpers. Für ein System von einzelnen
Teilchen hatten diese Größen bereits in Kapitel 3 eingeführt, und wir hatten gezeigt, dass es sich dabei
unter gewissen Voraussetzungen um Erhaltungsgrößen handelt.
Berechnen wir zunächst den Gesamtimpuls des Körpers. Für jedes einzelne Teilchen können wir den
Impuls aus (17.10) berechnen. Wenn mα die Masse des Teilchen ist, dann gilt
pα (t) = mα vα (t) = mα v(t) + mα uα,a ω(t) × na (t).
(17.18)
Der Gesamtimpuls des Körpers ergibt sich durch Summation über alle Teilchen,
X
X
X
P (t) =
pα (t) =
mα v(t) +
mα uα,a ω(t) × na (t).
(17.19)
Der Ausdruck in der ersten Klammer ist offenbar die Gesamtmasse des Körpers,
X
M=
mα .
(17.20)
α
α
α
α
189
Der erste Beitrag zum Gesamtimpuls ist folglich von der Form “Masse man Geschwindigkeit”. Der zweite
Beitrag, der zur Winkelgeschwindigkeit proportional ist, lässt sich durch geschickte Wahl des Bezugspunktes eliminieren. Dazu berechnen wir den Schwerpunkt R des Körpers. Für ihn gilt
1 X
1 X
1 X
mα r α =
mα (r + uα,a na ) = r +
mα uα,a na .
(17.21)
R=
M α
M α
M
α
Offenbar verschwindet sie Summe in der Klammer genau dann, wenn wir als Bezugspunkt r den Schwerpunkt wählen, und genau in diesem Fall ist der Gesamtimpuls des Körpers durch den einfachen Ausdruck
P (t) = M v(t) = M ṙ(t)
(17.22)
gegeben. Da dies, wie schon eingangs erwähnt, die folgenden Rechnungen erheblich vereinfacht, wollen
wir von nun an diese spezielle Wahl treffen.
Aus der Definition des Impulses lässt sich nun leicht die erste Bewegungsgleichung ableiten. Auch
dazu betrachten wir zuerst wieder die einzelnen Teilchen. Auf jedes Teilchen wirkt eine äußere Kraft
Fα und eine Zwangskraft Zα , die dafür sorgt, dass die Abstände des Teilchens zu den anderen Teilchen
unverändert bleiben. Beide Kräfte hängen im allgemeinen von der Zeit ab. Somit gilt für jedes einzelne
Teilchen die Bewegungsgleichung
ṗα (t) = Fα (t) + Zα (t).
(17.23)
Die einzelnen Zwangskräfte kennen wir nicht, aber wir müssen sie auch nicht kennen, um die Bewegungsgleichung für den starren Körper als ganzes zu bestimmen. Wir summieren dazu einfach über alle Teilchen.
Das ergibt
X
Ṗ (t) = F (t) =
Fα (t),
(17.24)
α
denn für die Zwangskräfte Zα gilt das dritte Newtonsche Gesetz. Sie heben sich gegenseitig als Wechselwirkungskräfte auf, so dass die Summe über alle Teilchen verschwindet. Die zeitliche Änderung des
Gesamtimpulses P ist folglich durch die Gesamtkraft F gegeben, die sich wiederum als Summe aller auf
die einzelnen Teilchen wirkenden Kräfte ergibt.
Aus (17.22) und (17.24) ergibt sich somit das folgende System von Gleichung für die Bewegung des
Schwerpunktes des Körpers,
M ṙ(t) = P (t),
Ṗ (t) = F (t)
⇒
M r̈(t) = F (t).
(17.25)
Das sind formal die Bewegungsgleichung für ein punktförmiges Teilchen. Offenbar haben wir damit gezeigt, dass sich ein ausgedehnter Körper, wenn wir von seiner Rotationsbewegung absehen, tatsächlich
wie ein punktförmiges, in seinem Schwerpunkt befindliches Teilchen verhält. Die Bewegung des Bezugspunktes, also des Schwerpunktes, entkoppelt anscheinend von der Rotationsbewegung.
Das ist aber nicht ganz richtig. Es kommt nämlich entscheidend darauf an, wovon die Kraft F abhängt.
Da es sich um die Summe über alle auf die einzelnen Teilchen wirkenden Kräfte handelt, hängt diese
Kraft im allgemeinen auch von den Orten und Geschwindigkeiten aller dieser Teilchen ab, und somit auch
von der räumlichen Lage und der Winkelgeschwindigkeit des Körpers. Wir wollen uns das an ein paar
einfachen Beispielen klar machen.
Aufgabe 17.4 Zunächst befinde sich der Körper entweder in einem homogenen Gravitationsfeld g oder
einem homogenen elektrischen Feld E, wobei die Teilchen dann zus ätzlich noch Ladungen qα tragen sollen. Man zeige, dass in diesem Fall die Gesamtkraft durch
F =Mg
bzw. F = Q E
gegeben ist, wobei M die Gesamtmasse und Q die Gesamtladung des K örpers ist.
190
(17.26)
In einem homogenen elektrischen Feld bzw. einem homogenen Gravitationsfeld verhält sich ein ausgedehnter Körper also tatsächlich wie ein Punktteilchen. Das gilt in guter Näherung auch dann noch, wenn
das Feld zwar inhomogen ist, aber auf einer Skala, die sehr viel größer ist als die Ausdehnung des Körpers.
Als ein typisches Beispiel dafür hatten wir die Bewegung eines Planeten im Gravitationsfeld der Sonne
diskutiert. Innerhalb des Planeten kann das Gravitationsfeld der Sonne als homogen angenommen werden,
so dass die Gesamtkraft F tatsächlich nur vom Ort r des Schwerpunktes des Planeten abhängt. Wir können
nun sogar abschätzen, wie groß der Fehler ist, den wir dabei machen.
Aufgabe 17.5 Bewegt sich der Körper in einem inhomogenen Gravitationsfeld g, so wirkt auf ein Teilchen
am Ort rα die Kraft
Fα = mα g(rα ) = mα g(r + uα,a na ).
(17.27)
Man entwickle diesen Ausdruck bis zur zweiten Ordnung in den Koordinaten u α,a in eine Taylor-Reihe und
berechne daraus näherungsweise die Gesamtkraft. Man zeige, dass der Term erster Ordnung verschwindet.
Eine Abweichung von der Punkteilchen-Näherung, bei der man F = g(r) setzt, tritt also erst dann auf,
wenn die zweite Ableitung des Gravitationsfeldes von Null verschieden ist.
Aufgabe 17.6 Man zeige, dass der relative Fehler, den man bei der Berechnung der Kraft macht, wenn
man die Erde im Gravitationsfeld der Sonne als punktförmig betrachtet, von der Größenordnung Erdradius
geteilt durch Bahnradius hoch zwei ist, also etwa 10−9 .
Wie dieses Beispiel zeigt, gilt die Punktteilchen-Näherung nur dann, wenn der Körper so klein ist, dass
er die Inhomogenität eines Feldes nicht spürt. Geschwindigkeitsabhängige Kräfte führen ebenfalls dazu,
dass die Rotationsbewegung nicht mehr von der Schwerpunktbewegung entkoppelt, und somit der Körper
nicht mehr als Punktteilchen betrachtet werden kann.
Aufgabe 17.7 Der Körper bewege sich in einem homogenen Magnetfeld B. Man zeige, dass auf ihn die
Gesamtkraft
F = Q v × B + χa (ω × na ) × B
(17.28)
wirkt, wobei Q wieder die Gesamtladung und χa die körperfesten Komponenten des elektrischen Dipolvektors sind,
X
X
Q=
qα ,
χa =
qα uα,a .
(17.29)
α
α
Die Formel für die Lorentzkraft auf ein Punktteilchen, das sich im Schwerpunkt befindet, gilt also nur
dann, wenn der Dipolvektor des Körpers verschwindet. Das ist zum Beispiel dann der Fall, wenn die
Ladungsverteilung der Massenverteilung entspricht, also für alle Teilchen qα /mα = q/m gilt.
Trägheitstensor, Drehimpuls und Drehmoment
Nun wollen wir die Bewegungsgleichungen für die Rotationsbewegung aufstellen. Die entscheidende
Größe, die wir dazu benötigen, ist der innere Drehimpuls S. Wir erinnern uns, dass es für ein System
von Punktteilchen verschiedene Möglichkeiten gibt, einen Drehimpuls zu definieren. Der Drehimpuls eines einzelnen Teilchens bezüglich eines raumfesten Bezugspunktes o ist durch
lα = (rα − o) × pα
(17.30)
gegeben, also durch das Kreuzprodukt des Ortsvektors mit dem Impuls, wobei der Ortsvektor der Abstandsvektor zum Bezugspunkt o ist. Summieren wir über alle Teilchen, so ergibt sich der Gesamtdrehimpuls zu
X
X
L=
lα =
(rα − o) × pα .
(17.31)
α
α
191
Den Schwerpunktdrehimpuls hatten wir als den Drehimpuls eines fiktiven, im Schwerpunkt des Systems
lokalisierten Teilchens definiert, dessen Impuls der Gesamtimpuls des Systems ist. Für den starren Körper
lässt sich dieser unmittelbar aus den bereits eingeführten Bewegungsgrößen berechnen,
X
J = (r − o) × P =
(r − o) × pα .
(17.32)
α
Für einen starren Körper bezeichnet man dieser Größe auch als Bahndrehimpuls. Sowohl der Gesamtdrehimpuls als auch der Bahndrehimpuls hängen von der Wahl des Bezugspunktes o ab. Ersetzen wir ihn
durch einen anderen Bezugspunkt o0 , so hatten wir in Kapitel 3 gezeigt, dass dann
L0 = J − (o0 − o) × P
und J 0 = J − (o0 − o) × P
(17.33)
gilt. Beide Größen transformieren in der gleichen Art und Weise unter einer Verschiebung des Bezugspunktes. Der innere Drehimpuls ist die Differenz S = L − J . Er ist folglich unabhängig vom Bezugspunkt und eignet sich zur Beschreibung der Rotationsbewegung eines starren Körpers daher besser als der
Gesamtdrehimpuls.
Für einen starren Körper lässt sich der innere Drehimpuls leicht berechnen. Wir bilden einfach die
Differenz der Gleichungen (17.31) und (17.32),
X
X
S =L−J =
(rα − r) × pα =
uα × p α
(17.34)
α
α
Wie in Abbildung 17.2(b) gezeigt, trägt jedes Teilchen mit einem Beitrag zum inneren Drehimpuls bei,
der sich aus dem Kreuzprodukt des Abstandsvektors vom Schwerpunkt mit dem Impuls ergibt. In diesem Sinne ist der innere Drehimpuls, wie wir bereits in Abbildung 3 gesehen hatten, so etwas wie der
Gesamtdrehimpuls des System, wobei als Bezugspunkt aber nicht der Koordinatenursprung, sondern der
Schwerpunkt gewählt wird.
Wie der Impuls lässt sich auch der Drehimpuls durch die Bewegungsgrößen des starren Körpers ausdrücken. Wenn wir (17.18) in (17.34) einsetzen, ergibt sich
X
X
S=
uα × p α =
mα uα,a na × (v + uα,b ω × nb )
α
=
α
X
α
mα uα,a na × v +
X
α
mα uα,a uα,b na × (ω × nb ).
(17.35)
Der erste Term verschwindet, denn es handelt sich wieder um die Summe aus (17.21). Für das doppelte
Kreuzprodukt gilt
na × (ω × nb ) = (na · nb ) ω − (na · ω) nb = (δab ωc − δbc ωa ) nc .
(17.36)
Wenn wir nun noch ein paar Indizes umbenennen, lässt sich der innere Drehimpuls schließlich wie folgt
ausdrücken,
X
S=
mα (uα,c uα,c ωa − uα,a uα,b ωb ) na .
(17.37)
α
Noch einfacher wird dieser Ausdruck, wenn wir die Komponenten von S bezüglich der Basis n a angeben.
Dann ist
X
S = Sa na , mit Sa = Θab ωb , Θab =
mα (uα,c uα,c δab − uα,a uα,b ).
(17.38)
α
192
Die 3 × 3-Matrix Θab heißt Trägheitstensor. Es handelt sich offenbar um die zeitlich konstanten Komponenten eines symmetrischen Tensors Θ zweiter Stufe bezüglich des körperfesten Koordinatensystems.
Aufgefasst als lineare Abbildung bildet der Trägheitstensor die Winkelgeschwindigkeit auf den Drehimpuls ab. Mit der Notation aus (9) können wir dafür auch schreiben
S = Θ(ω),
mit Θ = Θab na ⊗ nb .
(17.39)
Diese Beziehung ist analog zur Beziehung P = M v zu verstehen, die eine lineare Beziehung zwischen
Impuls und Geschwindigkeit herstellt. Zu beachten ist allerdings, dass der Trägheitstensor Θ, im Gegensatz zur Masse M des Körpers, von seiner Lage im Raum abhängt. Diese geht also implizit in die lineare
Beziehung (17.39) ein. Wie wir gleich sehen werden, lässt sich aber auch diese Beziehung eindeutig umkehren, so dass aus dem Drehimpuls auf die Winkelgeschwindigkeit und damit die Rotationsbewegung
des Körpers geschlossen werden kann.
Zuvor wollen wir jedoch die eigentliche Bewegungsgleichung aufstellen. Dazu müssen wir die Zeitableitung des Drehimpulses berechnen. Wir gehen wieder von der Bewegungsgleichung (17.23) für das
Teilchen α aus. Für den Gesamtdrehimpuls folgt daraus
X
X
L̇ =
(rα − o) × ṗα =
(rα − o) × (Fα + Zα ).
(17.40)
α
α
Hier haben wir bereits verwendet, dass die Geschwindigkeit ṙα des Teilchens proportional zu pα ist, so
dass wir diesen Term nicht berücksichtigen müssen. In der Summe heben sich außerdem die Zwangskräfte
wieder gegenseitig auf. Wir schreiben sie dazu als Summe über Wechselwirkungskräfte zwischen je zwei
Teilchen, für die das dritte Newtonsche Gesetz gilt,
X
Zα =
Zα,β , mit Zα,β = −Zβ,α , Zα,α = 0.
(17.41)
β
Daraus folgt
X
α
(rα − o) × Zα =
X
α,β
(rα − o) × Zα,β = −
X
α,β
(rβ − o) × Zα,β .
(17.42)
Die letzte Gleichung ergibt sich, indem wie zuerst die Indizes α und β vertauschen, und anschließend
benutzen, dass Zα,β = −Zβ,α ist. Addieren wir die beiden letzten Ausdrücke, so ergibt sich
X
X
2
(rα − o) × Zα =
(rα − rβ ) × Zα,β = 0,
(17.43)
α
α
denn die Zwangskräfte, die dafür sorgen, dass die Abstände der Teilchen konstant bleiben, sind Zentralkräfte. Damit haben wir noch einmal gezeigt, dass Zentralkräfte den Gesamtdrehimpuls eines Systems
nicht verändern. Seine Zeitableitung hängt nur von den äußeren Kräften ab,
X
L̇ =
(rα − o) × Fα .
(17.44)
α
Für die Zeitableitung des Bahndrehimpulses ergibt sich aus (17.24)
X
J˙ = (r − o) × Ṗ = (r − o) × F =
(r − o) × Fα .
(17.45)
Bilden wir wieder die Differenz, so finden wir schließlich die Bewegungsgleichung für S,
X
X
Ṡ = M , mit M =
(rα − r) × Fα =
uα × F α .
(17.46)
α
α
α
193
Der Vektor M wird als Drehmoment bezeichnet. Es setzt sich wieder aus Beiträgen der einzelnen Teilchen zusammen, wobei jeweils das Kreuzprodukt des Abstandsvektors vom Bezugspunkt mit der Kraft zu
bilden ist. Das Bild ist das gleiche wie in Abbildung 17.2(b), wobei der Impuls p α durch die Kraft Fα zu
ersetzen ist.
Die Bewegungsgleichungen des starren Körpers lassen sich damit wie folgt kompakt zusammenfassen.
Sie bilden ein System von Differenzialgleichungen erster Ordnung. Impuls und Drehimpuls sind als lineare
Funktionen der Geschwindigkeit und Winkelgeschwindigkeit gegeben, die wiederum durch die zeitlichen
Ableitungen des Ortes und der Lage des Körpers gegeben sind,
P = M v,
S = Θ(ω),
mit v = ṙ,
ω=
1
εabc (ṅa · nb ) nc .
2
(17.47)
Die zeitlichen Änderungen von Impuls und Drehimpuls ergeben sich aus der Kraft und dem Drehmoment,
die sich wiederum aus den Kräfte auf die einzelnen Teilchen zusammensetzen,
X
X
Ṗ = F =
Fα ,
Ṡ = M =
uα × F α .
(17.48)
α
α
Insbesondere folgt aus den Bewegungsgleichungen, dass P und S Erhaltungsgrößen sind, wenn auf den
Körper keine äußeren Kräfte einwirken. Mit diesem Fall eines “freien” starren Körpers werden wir und
gleich ausführlich beschäftigen.
Aufgabe 17.8 Man zeige, dass auf einen starren Körper in einem homogenen Gravitationsfeld kein Drehmoment wirkt.
Aufgabe 17.9 Man berechne das Drehmoment auf einen geladenen K örper in einem homogenen elektrischen Feld und drücke das Ergebnis durch die Feldstärke E und den Dipolvektor χ = χa na aus
Aufgabe 17.7 aus.
Aufgabe 17.10 Man berechne die kinetische Energie eines starren K örpers und zeige, dass diese sich wie
folgt aus einer “Bewegungsenergie” und einer “Rotationsenergie” zusammensetzt,
T =
1
1
1
1
M v · v + Θ(ω, ω) = M vi vi + Θab ωa ωb .
2
2
2
2
(17.49)
Aufgabe 17.11 Man bestimme das Trägheitmoment der Hantel aus Abbildung 5.3(b). Wie groß sind laut
(17.49) Bewegungs- und Rotationsenergie, wenn die Hantel mit einer Winkelgeschwindigkeit ω um eine
zur Stange senkrechte Achse rotiert und sich mit der Geschwindigkeit v durch den Raum bewegt?
Kontinuierliche Körper
Die Vorstellung von einem aus einzelnen Teilchen aufgebauten Körper ist zwar sehr nützlich, um das Konzept eines starren Körpers auf der Basis der Mechanik von Punktteilchen zu verstehen. In der Praxis ist
dieses Konzept aber unbrauchbar, da es unmöglich ist, einen makroskopischen Körper durch die Gesamtheit seiner atomaren Teilchen zu beschreiben. Außerdem verhalten sich diese Teilchen ja in Wirklichkeit
nicht wie klassische Punkteilchen, sondern müssten genau genommen quantenmechanisch beschrieben
werden.
Wir wollen daher zeigen, dass wir über den genauen Aufbau eines starren Körpers eigentlich gar nicht
viel wissen müssen, um seine Bewegungsgleichungen aufzustellen. Es ist nicht nötig, die Koordinaten u α,a
aller Teilchen kennen, und wir müssen auch nicht alle Massen m α oder alle Ladungen qα der Teilchen
kennen. Es genügt, gewisse Verteilungsfunktionen dieser Größen zu kennen.
194
In die Beziehungen (17.47) zwischen Impuls und Geschwindigkeit bzw. Drehimpuls und Winkelgeschwindigkeit gehen zum Beispiel nur zwei solche Größen ein, nämlich die Gesamtmasse M und der
Trägheitstensor Θ. Welche Größen konkret in die Kraftgleichungen (17.48) eingehen, hängt zwar davon
ab, welche Art von Kräften auftreten. Aber auch hier ist es im allgemeinen so, dass wir nur ganz spezielle
Funktionen der Teilchenorte, Massen, Ladungen etc. kennen müssen, um die Kraft bzw. das Drehmoment
zu bestimmen.
Am Beispiel der Größen M und Θ wollen wir zeigen, wie sich diese Größen für einen aus kontinuierlicher Materie bestehenden Körper berechnen lassen. Alles, was wir dazu wissen müssen, ist, wie die
Masse innerhalb des Körpers verteilt ist. Dies wird durch eine Massendichte µ(r) beschrieben. In einem
Volumenelement dω(r) am Ort r befindet sich dann eine Masse dµ(r) = µ(r) dω(r).
Das Problem bei der Beschreibung eines sich bewegenden starren Körpers ist nun, dass diese Massendichte von der Zeit abhängt, und zwar in einer sehr speziellen Art und Weise. Die Zeitabhängigkeit der
Massendichte µ(r) kommt dadurch zustande, dass sich der Körper als ganzes zwar bewegt, nicht jedoch
durch eine Verformung des Körpers. Dieses Problem können wir dadurch lösen, dass wir zur Beschreibung
der Massendichte das körperfeste Koordinatensystem verwenden.
Wir betrachten die Massendichte daher nicht als Funktion des Ortes, sondern als Funktion µ(u) des in
Abbildung 17.2 definierten Vektors u, und stellen sie explizit als Funktion der körperfesten Koordinaten
dar, also letztlich als Funktion µ({ua }) von drei reellen Zahlen. Diese Funktion ist dann zeitlich konstant,
das heißt wir können mit ihnen rechnen wie mit einer zeitlich konstanten Massenverteilung.
So können wir zum Beispiel die Gesamtmasse des Körpers berechnen, indem wir die Massendichte
integrieren,
Z
Z
Z
M=
dµ(u) =
dω(u) µ(u) =
du1 du2 du3 µ(u).
(17.50)
Die Integration erfolgt formal immer über den ganzen Raum, wobei wir aber annehmen, dass der Körper
nur eine endliche Ausdehnung hat, so dass effektiv nur über einen endlichen Raumbereich zu integrieren ist. Da durch die körperfesten Koordinaten ua ein kartesisches Koordinatensystem definiert wird, ist
das Volumenelement einfach durch dω(u) = du1 du2 du3 gegeben, wobei alle Koordinaten über ganz R
laufen.
Die Massendichte µ(u) ist nicht ganz beliebig, denn auch für einen kontinuierlichen Körper gilt, dass
der Bezugspunkt mit dem Schwerpunkt übereinstimmen muss. Wie wir gesehen haben, ist dies für einen
aus Teilchen aufgebauten Körper genau dann der Fall, wenn die Summe in (17.21) verschwindet, also
X
mα uα,a = 0.
(17.51)
α
Ersetzen wir hier die Summe durch ein Integral, und die Massen mα der Teilchen durch das Massenelement
dµ(u) am Ort u, so ergibt sich die entsprechende Bedingung für einen kontinuierlichen Körper zu
Z
Z
dµ(u) ua = dω(u) µ(u) ua = 0
(17.52)
Man beachte, dass dies eine Vektorgleichung ist, die sich aus drei Komponenten zusammensetzt. An einem
einfachen Beispiel lässt sich zeigen, dass dadurch die Lage des Bezugspunktes eindeutig festgelegt wird.
Aufgabe 17.12 Ein gleichmäßig mit Masse gefüllter Quader werde durch die folgende Massendichte beschrieben,
µ0
falls a1 < u1 < b1 , a2 < u2 < b2 , a3 < u3 < b3 ,
µ(u1 , u2 , u3 ) =
(17.53)
0
sonst.
Man bestimme die Gesamtmasse und zeige, dass die Schwerpunktbedingung (17.52) genau dann erf üllt
ist, wenn a1 + b1 = a2 + b2 = a3 + b3 = 0 ist. In diesem Fall befindet sich der Mittelpunkt des Quaders
genau am Ort mit den Koordinaten u1 = u2 = u3 = 0.
195
Aufgabe 17.13 Es sei eine Massedichte µ(u) vorgegeben, die die Bedingung (17.52) nicht erf üllt. Man
zeige, dass man dann zu einer verschobenen Massedichte µ̃(u) = µ(u − a) übergehen kann, wobei a
ein fester Vektor ist, so dass die neue Massendichte µ̃(u) die Bedingung erf üllt. Dies entspricht einer
Verschiebung des Bezugspunktes so, dass der neue Bezugspunkt mit dem Schwerpunkt übereinstimmt.
Nun können wir auch den Trägheitstensor eines kontinuierlichen Körpers berechnen. Wir gehen von der
Darstellung (17.38) für Punktteilchen aus,
X
Θab =
mα (uα,c uα,c δab − uα,a uα,b ),
(17.54)
α
und ersetzen die Summe wieder durch ein Integral. Das ergibt
Z
Θab = dω(u) µ(u) (uc uc δab − ua ub ).
(17.55)
Aufgabe 17.14 Man berechne dieses Integral für den Quader aus Aufgabe 17.12, wobei der Schwerpunkt
jetzt mit dem Bezugspunkt übereinstimmen soll. Es ist dann −a1 = b1 = `1 /2, −a2 = b2 = `2 /2, −a3 =
b3 = `3 /2, wobei `1 , `2 , `3 die Kantenlängen des Quaders sind. Man zeige, dass sich der Trägheitstensor
schließlich wie folgt als Matrix darstellen lässt,
2
`2 + ` 3 2
0
0
Θ11 Θ12 Θ13
M
.
0
`3 2 + `1 2
0
Θab = Θ21 Θ32 Θ23 =
(17.56)
12
2
2
0
0
` 1 + `2
Θ31 Θ32 Θ33
Für einen Würfel der Kantenlänge ` ergibt sich daraus Θab = M `2 δab /6, das heißt der Trägheitstensor
eines Würfels ist proportional zur Einheitsmatrix.
Symmetrien des Trägheitstensors
Um den Trägheitstensor eines gegebenen Körpers explizit zu berechnen, können wir auch andere als kartesische Koordinatensystem verwenden, wenn diese besser an die Geometrie des Körpers angepasst sind.
Oft helfen dabei auch Symmetrieüberlegungen. Hat der Körper bestimmte Symmetrien, so hat auch der
Trägheitstensor diese Symmetrien, und damit lässt sich seine Berechnung oft erheblich vereinfachen.
Was bedeutet in diesem Fall Symmetrie? Wir nennen einen Körper symmetrisch, wenn er unter einer
bestimmten Transformation in sich übergeht. Da eine solche Transformation stets den Schwerpunkt auf
sich selbst abbilden muss, kann es sich nur um eine Rotation oder eine Spiegelung handeln, also um eine
orthogonale Transformation. Eine solche Abbildung wird durch eine orthogonale Matrix dargestellt,
u 7→ ũ = D(u),
ua 7→ ũa = Dab ub ,
mit Dab Dac = δab .
(17.57)
Wir verwenden diese Abbildung zunächst dazu, im Integral (17.55) eine Substitution durchzuführen, indem wir die Integrationsvariable u durch ũ = D · u ersetzen. Zunächst zeigt man leicht, dass für den
Ausdruck in der Klammer
(ũe ũe δab − ũa ũb ) = Dac Dbd (ue ue δcd − uc ud )
(17.58)
gilt. Ferner ist unter einer orthogonalen Transformation das Volumenelement invariant,
dω(ũ) = dω(D(u)) = dω(u).
196
(17.59)
Eingesetzt in (17.55) ergibt sich somit
Z
Z
Θab = dω(ũ) µ(ũ) (ũe ũe δab − ũa ũb ) = Dac Dbd dω(u) µ(D(u)) (ue ue δab − ua ub )
(17.60)
Beides sind Eigenschaften von orthogonalen Transformationen, die wir in Kapitel 9 bewiesen haben.
Nun betrachten wir den speziellen Fall, dass es sich bei der Abbildung u 7→ D · u um eine Symmetrie
des Körper handelt. In diesem Fall ist
µ(D(u)) = µ(u),
(17.61)
denn die Massendichte ist vor und nach der Anwendung der Abbildung die gleiche. Offenbar ergibt sich
dann aus (17.60)
Θab = Dac Dbd Θcd .
(17.62)
Den Ausdruck auf der rechten Seite kennen bereits als das Verhalten eines Tensors zweiter Stufe unter einer
linearen Abbildung. Die Aussage ist also, dass der Trägheitstensor unter jeder orthogonalen Abbildung
invariant ist, die den Körper in sich überführt.
Der Trägheitstensor ist mindestens so symmetrisch wie der Körper, zu dem er gehört.
Als spezielles Beispiel hatten wir bereits den Trägheitstensor eines Quaders berechnet und gesehen, dass
es sich um eine Diagonalmatrix handelt, wenn wir die Koordinatenachsen in die Richtungen der Kanten
legen. Tatsächlich ist dies eine Konsequenz der Symmetrien. Der Quader ist symmetrisch bezüglich der
Spiegelungen an der Koordinatenebenen. So wird zum Beispiel die Spiegelung an der 1-2-Ebene durch
die Matrix
1 0
0
Dab = 0 1
0
(17.63)
0 0 −1
dargestellt. Wie man leicht sieht, ergibt sich aus (17.62) zum Beispiel
Θ23 = D2c D3d Θcd = −Θ23
⇒
Θ23 = 0.
(17.64)
Entsprechend lässt sich das Verschwinden von allen anderen nichtdiagonalen Einträge von Θ ab zeigen,
indem man jeweils eine der drei möglichen Spiegelungen auswählt und die Gleichung (17.62) für die
entsprechende Komponente aufschreibt.
Wir haben also gezeigt, dass der Trägheitstensor diagonal ist, wenn der Körper symmetrisch unter Spiegelungen an den Koordinatenachsen ist. Oft ist der Trägheitstensor sogar noch symmetrischer als der
Körper selbst. Ein Beispiel dafür ist der Würfel. In diesem Fall ist, wie wir in Aufgabe 17.14 gesehen
haben, Θab = M `2 δab /6. Dieser Tensor ist unter allen orthogonalen Transformationen invariant, denn
er ist proportional zum Einheitstensor, und somit ist (17.62) für alle orthogonalen Matrizen erfüllt. Aber
natürlich geht der Würfel nicht unter allen orthogonalen Abbildung in sich über.
Umgekehrt können wir die Symmetrien eines Körpers nun auch benutzen, um den Trägheitstensor zu
berechnen. Der symmetrischste denkbare Körper ist eine Kugel. Wir wollen also den Trägheitstensor einer Kugel mit Radius R, Massendichte µ0 , und folglich der Masse M = 4π µ0 R3 /3 berechnen. Da der
Einheitstensor δab der einzige Tensor zweiter Stufe ist, der unter allen orthogonalen Abbildungen invariant
ist, muss der Trägheitstensor der Kugel proportional dazu sein. Wir machen also den Ansatz
Θab = θ δab
(17.65)
Um die skalare Größe θ zu berechnen, bilden wir die Spur dieses Tensors. Es ist Θ aa = 3 θ und folglich
Z
Z
1
1
2
θ = Θaa =
dω(u) µ(u) (uc uc δaa − ua ua ) =
dω(u) µ(u) ua ua .
(17.66)
3
3
3
197
Das Integral lässt sich nun am leichtesten in Kugelkoordinaten auswerten. Wir ersetzen die kartesischen
Koordinaten (u1 , u2 , u3 ) durch (r, ϑ, ϕ), wobei r 2 = ua ua ist, und die Massendichte nur von r abhängt.
Mit dem bekannten Volumenelement in Kugelkoordinaten finden wir
2
θ=
3
Z
8π
µ0
µ(r) r 4 sin ϑ dr dϑ dϕ =
3
Z
R
r 4 dr =
8π
2
µ0 R 5 = M R 2 .
15
5
(17.67)
0
Damit finden wir für den Trägheitstensor einer Kugel
Θab =
2
M R2 δab .
5
(17.68)
Aufgabe 17.15 Wie bewegt sich eine Kugel, wenn auf sie keine äußeren Kräfte wirken? Wie bewegt sich
ein Würfel ohne äußeren Kräfte?
Aufgabe 17.16 Eine Kugel und ein Würfel rotieren mit der gleichen Winkelgeschwindigkeit. Beide haben
dieselbe Masse und bestehen aus dem gleichen Stoff. Welcher der K örper besitzt eine größere Rotationsenergie?
Um ein nicht ganz so einfaches Beispiel vorzuführen, berechnen wir noch den Trägheitstensor eines Zylinders. Er soll den Radius R, die Länge `, und die Massendichte µ 0 haben. Für die Masse ergibt sich daraus
M = π µ0 ` R2 . Die Koordinatenachsen legen wir so, dass die Rotationsachse des Zylinders die 3-Achse
ist, und der Querschnitt eine Kreisscheibe in der 1-2-Ebene liegt.
Der Trägheitstensor ist dann wieder diagonal, denn der Zylinder ist symmetrisch unter Spiegelungen an
allen drei Koordinatenebenen. Es gilt also
Θ11 0
0
Θab = 0 Θ22 0 .
(17.69)
0
0 Θ33
Darüber hinaus gilt sogar Θ11 = Θ22 , aufgrund der Rotationssymmetrie um die 3-Achse. Das ist anschaulich mehr oder weniger offensichtlich, denn wir können die Richtungen den 1- und 2-Achse beliebig
wählen und somit die beiden Achsen auch vertauschen. Formal können wir den Beweis wie folgt führen.
Der Zylinder ist symmetrisch unter einer Spiegelung an der Winkelhalbierenden in der 1-2-Ebene. Diese
wird durch die Matrix
0 1 0
Dab = 1 0 0
(17.70)
0 0 1
dargestellt. Aus der Symmetrieforderung (17.62) an den Trägheitstensor ergibt sich daraus
Θ11 = D1c D1d Θcd = D12 D12 Θ22 = Θ22 .
Wir müssen also nur zwei Größen berechnen, nämlich Θ11 = Θ22 und Θ33 . Beginnen wir mit
Z
Θ33 = dω(u) µ(u) (u12 + u2 2 ).
(17.71)
(17.72)
Um dieses Integral auszuwerten, verwenden wir Zylinderkoordinaten, das heißt wir setzen
u1 = r cos ϕ,
u2 = r sin ϕ,
u3 = z
198
⇒
dω(u) = r dr dϕ dz.
(17.73)
Für die Massendichte gilt
µ(r, z) =
µ0
0
falls r < R,
sonst.
−`/2 < z < `/2,
(17.74)
Mit den entsprechenden Integrationsgrenzen und nach Ausführung der ϕ-Integration ergibt sich daraus
Θ33 = 2π µ0
Z
0
Z `/2
π
1
dr dz r 3 = µ0 ` R4 = M R2 .
2
2
R
(17.75)
−`/2
Für die Komponenten Θ11 und Θ22 gilt
Z
Θ11 = dω(u) µ(u) (u22 + u3 2 ),
Θ22 =
Z
dω(u) µ(u) (u12 + u3 2 ).
(17.76)
Da wir bereits wissen, dass sie gleich sind, berechnen wir die Summe und drücken das Integral wieder in
Zylinderkoordinaten aus,
Θ11 + Θ22 =
Z
dω(u) µ(u) (u12 + u2 2 + 2 u3 2 ) = 2π µ0
Z
0
Z `/2
dr dz r (r 2 + 2 z 2 ).
R
(17.77)
−`/2
Auch dieses Integral kann leicht ausgewertet werden. Man findet schließlich
Θ11 = Θ22 =
π µ0 ` R 4 π µ0 ` 3 R 2
M
+
=
(3 R2 + `2 ).
4
12
12
(17.78)
Für einen zylindrischen Körper sind also stets zwei diagonale Komponenten des Trägheitstensors gleich,
nämlich die in der Rotationsebene des Zylinders, während die dritte Komponente größer oder kleiner sein
kann, je nachdem, ob der Zylinder eher flach oder lang ist.
Wenn zwischen Radius und Länge die Beziehung `2 = 3 R2 gilt, so sind alle Komponenten gleich. In
diesem Fall ist der Trägheitstensor proportional zur Einheitsmatrix, hat also die gleichen Symmetrien wir
der eines Würfels oder einer Kugel. Gilt dagegen `2 > 3 R2 , zum Beispiel im Fall einer langen Stange,
so ist die Komponenten des Trägheitstensors entlang der Drehachse des Zylinders kleiner als die anderen.
Ein Drehung um diese Symmetrieachse hat eine kleinere Rotationsenergie als eine Drehung um eine dazu
senkrechte Achse. Ist der Zylinder dagegen flach wie ein Münze, so ist ` 2 < 3 R3 . In diesem Fall hat eine
Rotation um die Symmetrieachse ein höhere Energie als eine Rotation um eine dazu senkrechte Achse.
Aufgabe 17.17 Wie sieht der Trägheitstensor für das Rad aus Abbildung 12.3 aus?
199