1.4 Kinetik des starren Körpers
Werbung

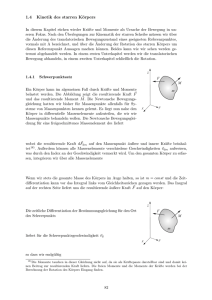
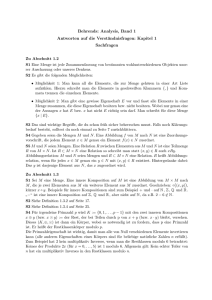
1.4 Kinetik des starren Körpers In diesem Kapitel rückt wieder die Ursache der Bewegung in unseren Fokus. Nach den Überlegungen zur Kinematik der starren Scheibe müssen wir über die Änderung des translatorischen Bewegungszustand eines geeigneten Referenzpunktes, vormals mit A bezeichnet, und über die Änderung der Rotation des starren Körpers um diesen Referenzpunkt Aussagen machen können. Beides kann wie wir sehen werden getrennt abgehandelt werden. In einem ersten Unterkapitel werden wir die translatorischen Bewegung abhandelnn, in einem zweiten Unterkapitel schließlich die Rotation. z 1.4.1 Schwerpunktsatz F M Die Abbildung zeigt einen Körper der durch Kräfte und Momente belastet wird. Dargestellt ist die resultierende Kraft F⃗ und das re⃗ . Die Newtonsche Bewegungsgleichung hatsultierende Moment M ten wir bisher für Massenpunkte allenfalls für Systeme von Massenpunkten kennen gelernt. Es liegt nun nahe den Körper in differentielle Massenelemente aufzuteilen, die wir wie massenpunkte behandeln wollen. Die newtonsche Bewegungsgleichung für eine freigeschnittennes masseneement dm liefert m y x dm dMdm dFdm vdm wobei die resultierende Kraft dF⃗dm auf den Massenpunkt äußere und innere Kräfte beinhaltet12 . Außerdem können alle Massenelemente verschiedene Geschwindigkeiten aufweisen, was durch den Index an der Geschwindigkeit vermerkt wird. Um den gesamten Körper zu erfassen, integrieren wir über alle Massenelemente Wenn wir stets die gesamte Masse des Körpers im Auge halten, so ist m = const und die Zeitdifferentiation kann unter das Integral links vom Gleichheitszeichen gezogen werden, das Inegral auf der rechten Seite liefert uns die resultierende Kraft F⃗ auf den Körper: z ∫ Das Integral F ( ) ⃗vdm dm können wir als die Berechnungsformel vS aS (m) S m für den Schwerpunkt S wieder erkennen x y so dass wir endgültig 12 Die Momente tauchen auch an einem endlichen Massenelement in dieser Beziehung nicht auf, da sie als Kräftepaare darstellbar sind und damit keinen Beitrag zur resultierenden Kraft liefern. 77 M erhalten. Das Ergebnis ist sehr einfach zu interpretieren. Der Schwerpunkt eines ausgedehnten Körpers der Masse m wird unter dem Einfluss äußerer Kräfte, die irgendwie auf den Körper einwirken, so beschleunigt, als ob die Masse des Körpers im Schwerpunkt konzentriert ist. Schwerpunktsbeschleunigung ⃗aS und resultierende Kraft F⃗ sind zueinander parallel, ihre Wirkungslinien müssen nicht zusammenfallen13 . es sei ausdrücklich darauf hingewiesen, dass wir bei dieser Herleitung die Näherung des starren Körpers nicht genutzz haben. Genau die gleiche Aussage hatten wir auch bereits für ein System von Massenpunkten im Abschnitt über Streu und Stoßproblemen abgeleitet. Das Ergebnis rechtfertigt im Nachhinein, die Kinetik des Massenpunktes als eine sehr brauchbare Approximation der Wirklichkeit, wenn nicht die binnenkörperliche Rotation eine wichtige Rolle spielen soll. Die Beschreibung der Rotation des Körpers wollen wir an dieser Stelle noch zurückstellen und zunächst die Beschreibung mechanischer Energiefomen für den starren Körper insbesondere die potentielle Energie in einem konservativen Schwerefeld und die kinetische Energie. 13 Es sei explizit darauf hingewiesen, dass die Lage der Wirkungslinie wohl eine Rolle spielt, denn die Rotationsbewegung repräsentiert durch φ ⃗˙ und φ ⃗¨ des Körpers um den Schwerpunkt S wird dadurch beeinflusst. Für die Beschleunigung aller anderen Punkte A außer des Schwerpunktes S erhalten wir mit der Eulerschen Formel für den starren Körper ) ( ⃗˙ × ⃗rA,S + φ ⃗¨ × ⃗rA,S . ⃗aA = ⃗aS + ⃗aA,S = ⃗aS + φ ⃗˙ × φ 78 1.4.2 Potentielle und kinetische Eneergie des Körpers Potentielle Energie in konstantem Schwerefeld Wir hatten beim Massenpunkt die potentielle Energie der Gewichtskraft als die negative Arbeit der Gewichtskraft bei der Verschiebung im Schwerefeld eingeführt. Wieder teilen wir deshalb den Körper in infinitesimale Massenelemente dm auf und übernehmen diese Definition für jedes Massenelement: z g G Wir erleichtern uns die Herleitung, indem wir einen starren Körper annehmen. Dann können wir die Verschiebung d⃗rdm mit Euler durch dm S m A x ⃗ = ⃗g dm in die obige Beausdrücken und dies zusammen mit dG ziehung ein y dG dm dFdm dMdm drdm einsetzen. Integrieren für alle Massenelemente des Körpers Das zweite Integral können wir mit ⃗g = const und d⃗ φ = const auswerten zu Es bietet sich hier nun an, den Punkt A geschickt zu wählen. Identifizieren wir nämlich A mit dem Schwerpunkt des starren Körpers S, so wird verschwindet das Integral: Es verbleibt das erste Integral, wobei die Translation d⃗rA = d⃗rS für alle Punkte des Körpers gleich ist Die potentielle Energie des starren Körpers berechnet sich also aus der Verschiebung des Schwerpunkts des starren Körpers im Schwerefeld, genau so, als ob die Gesamtmasse im Schwerpunkt konzentriert ist unabhängig davon ob der Körper bei der Verschiebung noch rotiert oder nicht. 79 Orientieren wir die Schwerebeschleunigung antiparallel zur z-Achse so wird ⃗g = (0, 0, −g) und für eine endliche Verschiebung vom Ort 1 zum Ort 2 Übung Zeigen Sie, dass sich auch ein deformierbarer Körper hinsichtlich der potentiellen Energie wie ein Massenpunkt verhält, das heißt ,dass alleine die Lage des Schwerpunkts im Schwerefeld die Potentielle Energie bestimmt! Kinetische Energie des starren Körpers z Auch für die Bestimmung der kinetischen Energie eines ausgedehnten Körpers wollen wir wieder vom Massenpunkt ausgehen., Die kinetische Energie eines infinitesimalen Massenpunktes ist demnach vdm dm S m A und für den Körper insgesamt x y Die Geschwindigkeit jedes Massenelementes kann unterschiedlich sein. Wir vermuten, dass wieder der Schwerpunkt S eine besondere Rolle spielt und wir könnten ⃗vdm mit Euler durch ausdrücken. Oft rotiert aber ein betrachteter Körper um einen festen Punkt, durch den die Achse der Drehbewegung verläuft. Wir wollen deshalb allgemeiner formulieren und einen zunächst unbestimmten Punkt A als Referenzpunkt wählen: In der Definition für die kientische Energie benötigen wir das Quadrat der Geschwindigkeit Wir multiplizieren dies aus und erhalten so das unter Formel für die kinetische Energie 80 lautet. Das erste Integral liefert, wenn wir berücksichtigen, dass die Geschwindigkeit vA = const des Referenzpunktes A als translatorischer Beitrag für alle Massenelemente konstant ist im zweiten Integral setzen wir außerdem ⃗vdm,A = φ ⃗˙ × ⃗rdm,A und berücksichtigen, dass für den starren Körper φ ⃗˙ = const, so dass sich ergibt. Im dritten Integral schließlich müssen wir auswerten. Wir nutzen hierfür die Lagrangesche Identität14 so dass Der Ausdruck ist eine rein geometrische Größe, der nur von der Massenverteilung im Körper abhängt. JA wird Massenträgheitsmoment bezogen auf den Punkt A genannt. Das Massenträgheitsmoment bezogen auf eine Punkt wird umso größer, je weiter Teile der Gesamtmasse eines Körpers vom Punkt A entfernt sind, hohle Körper haben daher ein größere Massenträgheitsmoment als kompakte Körper15 . Die weitere Diskussion wollen wir an dieser Stelle noch zurückstellen. 14 Die Umrechniung mit der Lagrangeschen Identität ist eine Möglichkeit eine Darstellung der kinetischen Energie abzuleiten, die insbesondere dann praktisch ist, falls vorrangig ebene starre Körper betrachtet werden sollen. Die Darstellung der kinetischen Energie durch den Trägheitstensor soll hier nicht genutzt werden. 15 Die Formel für das Massenträgheitsmoment erinnert an die Definition des Flächenträgheitsmomentes I in der Festigkeitslehre. Ein großes Flächenträgheitsmoment hatten wir bei Balken als Ursache für einen großen Widerstand gegen Verbiegung identifiziert. Die bei einer Verformung gespeicherte Energie wächst mit wachsendem Flächenträgheitsmoment. Entsprechend zeigt ein großes Massenträgheitsmoment in der Kinetik an, dass ein Körper großen Trägheitsmomentes eine große Rotationsenergie speichert, beziehungsweise eine große Trägheit gegen Änderung des Rotationszustands aufweist. 81 Wir erhalten zusammengefasst folgenden Ausdruck für die kinetische Energie des starren Körpers Insbesondere der letzte Term zeigt einen komplizierten Beitrag zur kinetischen Energie, in den die Richtungsabhängigkeit zwischen momentaner Drehachse in Richtung φ ⃗˙ /φ̇ und Lage der Massenteilchen des Körpers eingeht. Einfachere Formeln erhalten wir, falls wir den Referenzpunkt A mit dem Schwerpunkt S identifizieren, dann ist stets ⃗rS,A = ⃗0 sowie ⃗va = ⃗vS und es tritt das Massenträgheitsmoment bezüglich des Schwerpunkts auf. Es ergibt sich Der letzte Term verschwindet erst, wenn alle Massenteilchen eines Körpers senkrecht zur momentanen Drehachse in Richtung φ ⃗˙ /φ̇ angeordnet sind. Dies ist der Fall falls es sich um einen ebenen starren Körper handelt dessen Drehachse senkrecht zur Ausdehnung des Körpers orientiert ist. Für die kinetische Energie eines ebenen starren Körpers erhalten wir die einfache Beziehung Der erste Anteil stellt den Anteil der Translation des Körpers dar. Da alle Massenelemente die gleiche Translation ausführen ist dieser Anteil nicht zu unterscheiden von der kinetischen Energie eines Massenpunktes gleicher Masse und Geschwindigkeit. Bei ausgedehnten Körpern ist aber zusätzlich Energie ∫in der Rotation gespeichert, die beim Massenpunkt keine Rolle spielen kann, da lim rdm,S →0 (m) 2 rdm,S dm = 0. Wir können die kinetische Energie des ebenen starren Körpers aufteilen in einen translatorischen und eine rotatorischen Anteil Wir erkennen eine Analogie zwischen den beiden Energieanteilen. Es sei explizit darauf hingewiesen: Eine ähnlich einfache Aufteilung der kinetischen Energie ist für keinen anderen Punkt A ̸= S im Körper möglich, auch nicht für den ebenen Körper, da zwar nach wie vor gilt, jedoch der Term 82 in unserer vollständigen Formel im Allgemeinen nicht verschwindet. Dieser wird nur dann sicher Null, falls der Bezugspunkt A überhaupt keine Geschwindigkeit besitzt. Ein Fal der oft auftritt. Denn der Punkt A muss lediglich auf der Drehachse angesiedelt sein und in dem Koordinatensystem, aus dem die Geschwindigkeiten heraus definiert sind, ruhen: Dieser Fall tritt bei technischen Anwendungen außerordentlich oft auf. Unter dieser Bedingung gilt für den ebenen Körper bei Rotation um einen im Bezugssystem ruhenden Achspunkt A: In diesem Ausdruck tritt dann kein translatorischer Energiebeitrag auf. Übung m Zeigen Sie, dass für die kinetische Energie des dargestellten ebenen starren Körpers S ϕ Teben 1 1 1 = m vS2 + JS φ̇2 = JA φ̇2 2 2 2 mit JA = JS + m rS2 y A x gilt.16 16 Der Anteil m rS2 des Massenträgheitsmoment bezüglich des Punktes A wird Steinerscher Anteil genannt. Offensichtlich ist das Trägheitsmoment eines Körpers bezüglich des Schwerpunkts das kleinste. Bei Drehung um eine Achse außerhalb des Schwerpunkts erhäht sich das Trägheitsmoment um den stets positiven Steinerschen Anteil, der sich aus dem Abstandsquadrat und der Gesamtmasse des Körpers errechnet. 83 Beispiel Ein Rad vom Radius r und homogener Masseverteilung rollt ohne zu rutschen aus der Ruhelage eine schiefe Ebene hinunter. Bestimmen Sie in Abhängigkeit von der Strecke s die kinetische Energie, die Geschwindigkeit des Rades und seine Beschleunigung, g s S r a) wenn das Rad als ebener starrer Körper, Index SK, betrachtet wird, α b) wenn das Rad zum Vergleich als Massenpunkt, Index M P , betrachtet wird! Lösung s S Wir nutzen den Energiesatz nach dem kinetische und potentielle Energie bei s = 0 zuzüglich der Arbeit der Kräfte entlang der zurückgelegten Strecke s mit der kinetischen und potentiellen Energie an dieser Stelle übereinstimmt: m, r α Um diesen Ansatz ausnutzen zu können müssen wir die Arbeit der äußeren Kräfte ausser der Gewichtskraft bestimmen. Dazu ist ein Freischnitt sinnvoll. Setzen wir kinetische und potentielle Energie bei s = 0 zu Null erhalten wir ⃗ senkrecht zur Bewegungsrichtung steht verschwindet ihre Arbeit: Da die Normalkraft N Das Integral über die Reibkraft verschwindet ebenfalls Dies sieht man ein, wenn man die Reibkraft in den Mittelpunkt des Rades parallel verschiebt und das dadurch entstehende Versatzmoment MR in den Freischnitt einträgt. Die Arbeit der Reibkraft und die Arbeit des Versatzmomentes ergänzen sich genau zu Null. Wir erhalten also einfach wobei 84 Für das rollende Rad auf der feststehenden schiefen Ebene hatten wir vS = r φ̇ gefunden, so dass wir für die kinetische Energie den Ausdruck erhalten. Für das Massenträgheitsmoment finden wir mit m(rdm ) = m 2 π rdm → dm = m 2 rdm drdm /r2 π r2 und daher oder Die Beschleunigung aS (s) des Rades erhalten wir, indem wir die Beziehung für die Geschwindigkeit nach der Zeit t ableiten: b) Vergleichen wir das Ergebnis für den sich ohne Reibungsverluste auf der Ebene bewegenden Massenpunkt, so erhalten wir aus dem Energiesatz Das Verhältnis der kinetischen Energien,der Geschwindigkeiten und der beschleunigungne ist also Der reibungsfrei gleitende Massenpunkt nimmt demnach schneller Geschwindigkeit auf als der starre Körper. Die zur Verfügung stehende potentielle Energie wird beim starren Körper nicht nur in translatorische kinetische Energie sondern auch in rotatorische kinetische Energie überführt. Für die Zunahme der Winkelgeschwindigkeit ist die Reibkraft zuständig. Dadurch, dass diese am Umfang angreift, kann sie die Rotationsgeschwindigkeit des Rades so erhöhen, wie es die Abrollbedingung erfordert. In Einklang mit unserer Aussage, dass die Reibkraft keine Arbeit leistet, schlägt also durch die Reibung beim rollenden Rad kein Verlust mechanischer Energien zu Buche17 . Zur Berechnung der Reibkraft werden wir im folgenden Abschnitt den Drehimpulssatz für den starren Körper verwenden, dessen Herleitung uns noch fehlt und die Kinetik des starren Körpers vervollständigt. 17 Die Reibkraft am rollenden Rad kommt durch Haftreibung zustande. Im Unterschied zur Rollreibung, die einhergeht mit der Deformation des rollenden Körpers, kann beim starren Körper keine Rollreibung auftreten! 85 Massenträgheitsmomente Ebener Körper y Ebene Körper S dm r Mit der Definition x m ergeben sich folgende Formeln Kreisscheibe oder Walze S r Kreisring oder Rohr S r s Rechteck oder Quader S b a Stab oder Platte S d l Es gilt der Satz von Steiner: y Offensichtlich ist das Massenträgheitsmoment bezüglich des Schwerpunkts stets das kleinste für einen gegebenen Körper. rS S x A Massenträgheitsmoment der homogenen Kugel um eine Symmetrieachse z Rotiert eine homogene Kugel um eine Schwerpunktsachse so ist das Massentägheitsmoment durch √ wobei ra = x2a + ya2 den Abstand der Massenelemente dm von der Achse darstellt, wenn diese nach der z-Richtung ausgerichtet ist. S x m,R y Zur Berechnung des Integrals nutzen wir die Kugelsymmetrie der Kugel aus und betrachten das einfachere Integral 86 Es ist nun wegen der Symmetrie R′3 Da die Masse kubisch mit dem Radius anwächst m(R′ ≤ R) = m 3 , lässt sich die R Integrationsvariable substituieren durch so dass wir das Ergebnis erhalten. Übungen a) Vergleichen Sie das Massenträgheitsmomentes eines dünnwandigen Rohres der Masse m mit einem Vollstab der gleichen Masse! b) Bestimmen Sie das Massenträgheitsmoment eines dickwandigen Rohres der Msse m mit Innenradius ri und Außenradius ra ! ∫ c) In der Festigkeitslehre hatten wir das polare Flächenträgheitsmoment Ip = r2 dA (A) definiert. Zeigen Sie, dass der Zusammenhang JS = Ip m A gilt! d) Beweisen Sie den Satz von Steiner! e) Bestimmen Sie das Massenträgheitsmoment einer hhomogenen Hohlkugel mit Innenradius ri und Außenradius ra ! 87 Beispiel Ein homogener Quader der Masse m gleitet reibungsfrei in einer Halfpipe aus der Ruhelage 1 in die Position 2. g r M 1 Geg.: m , a , b , r , ⃗g b a S 2 Ges.: Winkelgeschwindigkeit α ⃗˙ 2 in der Position 2! Lösung Da der Quader reibungsfrei gleitet gilt der Energieerhaltungssatz M 1 b S Die kinetische Energie setzt sich zu jedem Zeitpunkt aus der translatorischen kinetischen Energie des Schwerpunkt und der Rotationsenergie um den Schwerpunkt zusammen 2 S a Der Quader dreht aber auch um den in unserem Bezugssystem raumfesten Mittelpunkt der Halfpipe, so dass wir auch wobei ρ den Kreisradius der Bahnkurve des Schwerpunkts S bezeichnet. Der Schwerpunkt überstreicht auf dem Weg von 1 nach 2 einen Winkel von π/2. Damit errechnet sich die Abnahme an potentieller Energie Mit den geometrischen Beziehungen folgt Mit T1 = 0 folgt daher 88 Kontrollen: Einheit: [α2 ] = 1 ( kg m/s2 m )1/2 √ = s kg m2 Spezialfall Massenpunkt: Mit a = b = 0 gilt ∆h = r und mit JM = mr2 folgt für die Winkelgeschwindigkeit das bekannte Ergebnis: 89