English - Universität Koblenz · Landau
Werbung

Grundlagen der Algebra und der
elementaren Zahlentheorie
Kurz-Skript zur Vorlesung
Sommersemester 2011
von
Dr. Dominik Faas
Institut für Mathematik
Fachbereich 7: Natur- und Umweltwissenschaften
Universität Koblenz-Landau
Literatur zur Vorlesung
Friedhelm Padberg: Elementare Zahlentheorie Mathematik Primar- und Sekundarstufe (Spektrum Akadademischer Verlag, 2008)
Harald Scheid: Einführung in die Zahlentheorie (Klett Studienbücher, 1972)
Harald Scheid, Lutz Warlich: Mathematik für Lehramtskandidaten Band II: Algebraische Strukturen und Zahlbereiche (Akademische Verlagsgesellschaft, 1974)
Hans-Joachim Gorski, Susanne Müller-Philipp: Leitfaden Arithmetik (vieweg,
1999)
Alan Bell: Algebraische Strukturen (Raeber Verlag, 1966)
Jürg Krämer: Zahlen für Einsteiger: Elemente der Algebra und Aufbau der Zahlbereiche (vieweg, 2008)
Jürgen Wolfard: Einführung in die Zahlentheorie und Algebra (vieweg studi-
um,1996)
Stefan Müller-Stach, Jens-Piontkowski: Elementare und algebraische Zahlen-
theorie Ein moderner Zugang zu klassischen Themen (vieweg, 2006)
Bezeichnungen
Wir benutzen (manchmal) die folgenden Symbole:
∀
:
für alle
∃
:
es existiert (mindestens) ein
∄
:
es existiert kein
∃!
:
es existiert genau ein
∧
:
und
∨
:
oder
⋅
:
entweder oder
∨
Wichtig für uns sind (unter anderem) die folgenden Mengen:
N = {1, 2, 3, . . .}
Menge der natürlichen Zahlen
N0 = N ∪ {0} = {0, 1, 2, 3, . . .}
Z = {. . . , −2, −1, 0, 1, 2, . . .}
Q=
{ ab ;
a, b ∈ Z, b =/ 0}
Menge der natürlichen Zahlen und der 0
Menge der ganzen Zahlen
Menge der rationalen Zahlen
0 Die ganzen Zahlen — Einleitung
In weiten Teilen dieser Vorlesung widmen wir uns dem Studium der ganzen Zahlen.
Die Menge der ganzen Zahlen
Z = {. . . , −3, −2, −1, 0, 1, 2, 3, . . .}
kann wie folgt eingeordnet werden:
N⊂Z⊂Q ⊂R⊂C
Dabei sind
= {a ∈ Z; a > 0} = {1, 2, 3, . . .} (Menge der positiven ganzen Zahlen)
a
Q = { ; a, b ∈ Z, b =/ 0} (Menge der Brüche (Quotienten) ganzer Zahlen)
b
N
Bemerkung 0.1. (Verknüfungen in Z)
(Addition) Zwei ganze Zahlen a, b ∈ Z können addiert werden und man erhält
als Ergebnis wieder eine ganze Zahl a + b ∈ Z.
(Kommutativgesetz und Assoziativgesetz der Addition) Für alle a, b, c ∈ Z gilt:
a + b = b + a und (a + b) + c = a + (b + c).
(Neutrales Element der Addition) Es existiert eine ganze Zahl 0 ∈ Z mit
a + 0 = 0 + a = a für alle a ∈ Z.
3
0 Die ganzen Zahlen — Einleitung
(Inverse Elemente bzgl. der Addition) Zu jeder ganzen Zahl a ∈ Z gibt es eine
ganze Zahl −a ∈ Z mit a + (−a) = (−a) + a = 0.
(Subtraktion) Basierend auf der Addition und der Existenz der Inversen kann
def
die Subtraktion definiert werden: a − b = a + (−b) ∈ Z für a, b ∈ Z
(Äquivalenzumformungen mit der Addition) Für alle a, b, c ∈ Z gilt die Äquivalenz:
a=b ⇔ a+c=b+c
(Multiplikation) Zwei ganze Zahlen a, b ∈ Z können multipliziert werden und
man erhält als Ergebnis wieder eine ganze Zahl a ⋅ b ∈ Z.
(Kommutativgesetz und Assoziativgesetz der Multiplikation) Für alle a, b, c ∈ Z
gilt: a ⋅ b = b ⋅ a und (a ⋅ b) ⋅ c = a ⋅ (b ⋅ c)
(Neutrales Element der Multiplikation) Es existiert eine ganze Zahl 1 ∈ Z mit
a ⋅ 1 = 1 ⋅ a = x für alle a ∈ Z.
Zu x ∈ Z nennt man ein Element y ∈ Z multiplikativ invers zu x, falls x ⋅ y = 1
ist. Die einzigen ganzen Zahlen, die ein multiplikativ Inverses in Z haben sind
−1 und 1. Eine Division ganzer Zahlen (mit Ergebnis in Z) ist im Allgemeinen
nicht möglich.
(Distributivgesetz) Für alle a, b, c ∈ Z gilt: a ⋅ (b + c) = a ⋅ b + a ⋅ c
(Nullprodukt) Für alle a, b ∈ Z gilt die Äquivalenz:
a ⋅ b = 0 ⇔ a = 0 oder b = 0
(Kürzungsregel) Für alle a, b, c ∈ Z mit c =/ 0 gilt die Äquivalenz:
a=b ⇔ a⋅c=b⋅c
Bemerkung 0.2. (Größenrelation in Z)
Es gibt eine Relation ≤ auf Z mit folgenden Eigenschaften:
≤ ist eine totale Ordnungsrelation, das heißt, für alle a, b, c ∈ Z gilt:
– (Reflexivität) a ≤ a
– (Transitivität) Aus a ≤ b und b ≤ c folgt a ≤ c.
– (Antisymmetrie) Aus a ≤ b und b ≤ a folgt a = b.
– (Totalität) Es gilt stets a ≤ b oder b ≤ a.
Falls a ≤ b gilt, sagt man: a ist kleiner oder gleich b.
(Abgeleitete Relationen) Mithilfe der Relation ≤ definiert man a < b (a ist
kleiner als b), falls a ≤ b und a =/ b gilt. Statt a ≤ b schreibt man auch b ≥ a (b
ist größer oder gleich a) und statt a < b schreibt man auch b > a (b ist größer
als a).
(Anordnung auf der Zahlengeraden) Jede ganze Zahl entspricht einem Punkt
auf der Zahlengeraden:
4
Dabei gilt a < b genau dann, wenn b einem Punkt entspricht, der weiter rechts
auf der Zahlengerade liegt, als der a zugeordnete Punkt.
(Verträglichkeit mit der Addition) Für a, b, c ∈ Z gilt:
⎧
⎪
⎪ a≤b ⇔ a+c≤b+c
⎨
⎪
⎪
⎩ a<b ⇔ a+c<b+c
⎫
⎪
⎪
⎬
⎪
⎪
⎭
Insbesondere ist n + m ∈ N, falls n, m ∈ N sind.
(Verträglichkeit mit der Multiplikation) Für a, b, c ∈ Z gilt:
⎧
⎪
⎪
⎨
⎪
⎪
⎩
⎧
⎪
⎪
⎨
⎪
⎪
⎩
⎫
a≤b ⇔ a⋅c≤b⋅c ⎪
⎪
⎬
a<b ⇔ a⋅c<b⋅c ⎪
⎪
⎭
⎫
a≤b ⇔ a⋅c≥b⋅c ⎪
⎪
⎬
⎪
a<b ⇔ a⋅c>b⋅c ⎪
⎭
, falls c > 0
, falls c < 0
Insbesondere ist n ⋅ m ∈ N, falls n, m ∈ N sind.
(Existenz eines Minimums für Teilmengen von N) Jede nichtleere Teilmenge
von N hat ein kleinstes Element (Minimum).
Bemerkung 0.3. (Potenzen)
Für a ∈ Z und n ∈ N0 definiert man an ∈ Z durch
def
an = a ⋅ a ⋅ . . . ⋅ a (falls n > 0)
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¶
und
def
a0 = 1
n-mal
Es gilt stets 1n = 1 und 0m = 0 (falls m > 0). Außerdem gelten die Potenzgesetze:
Für alle a, b ∈ Z und alle n, m ∈ N0 ist:
(a ⋅ b)n = an ⋅ bn ,
an ⋅ am = an+m ,
(an )
m
= an⋅m
Bemerkung 0.4. (Betrag)
Für a ∈ Z definiert man den Betrag von a als
⎧
⎪ a
def ⎪
∣a∣ = ⎨
⎪
⎪
⎩ −a
, falls a ≥ 0
, falls a < 0
Duch ∣a − b∣ wird der Abstand zweier ganzer Zahlen a, b ∈ Z auf der Zahlengeraden
angegeben. Für alle a, b ∈ Z und alle n ∈ N gelten:
∣a∣ ≥ 0,
∣a ⋅ b∣ = ∣a∣ ⋅ ∣b∣,
∣an ∣ = ∣a∣n ,
∣a + b∣ ≤ ∣a∣ + ∣b∣,
∣a∣ = 0 ⇔ a = 0
5
1 Teilbarkeit
1 Teilbarkeit
Definition 1.1. (Teilbarkeit)
Für a, b ∈ Z defniert man a ∣ b, falls eine Zahl x ∈ Z existiert mit x ⋅ a = b.
Man sagt dann: a ist ein Teiler von b (kurz: a teilt b), oder umgekehrt: b ist ein
Vielfaches von a. Falls a kein Teiler von b ist, so schreibt man a ∤ b.
Satz 1.2. (Eigenschaften der Teilbarkeitsrelation)
(a) Für alle a, b, c ∈ Z gilt:
a ∣ a (Reflexivität)
Aus a ∣ b und b ∣ c folgt a ∣ c. (Transitivität)
Aus a ∣ b und b ∣ a folgt a = b oder a = −b. (Antisymmterie liegt “nur bis
aufs Vorzeichen“ vor.)
Die Teilbarkeitsrelation ist also eine Quasiordnung aber keine Halbordnung auf
Z. Auf N ist die Teilbarkeitsrelation hingegen eine Halbordnung, d.h. sie ist
reflexiv, transitiv und antisymmetrisch.
(b) Weder auf Z noch auf N ist die Teilbarkeitsrelation total, d.h. es gibt Zahlen
a, b ∈ N mit a ∤ b und b ∤ a.
(c) Weitere Eigenschaften der Teilbarkeitsrelation sind (für a, b, ã, b̃ ∈ Z beliebig):
Es gilt die Äquivalenz:
a∣b
⇔
(−a) ∣ b
⇔
a ∣ (−b)
⇔
(−a) ∣ (−b)
(Teilbarkeit ist also “unabhängig vom Vorzeichen“.)
Es gilt a ∣ 0 und 1 ∣ a.
Aus a ∣ b und b =/ 0 folgt ∣a∣ ≤ ∣b∣.
Aus a ∣ b und ã ∣ b̃ folgt (a ⋅ ã) ∣ (b ⋅ b̃).
Falls a ∣ b gilt (und a =/ 0 ist), so ist
b
a
b
a
∈ Z und es gilt ( ab ) ∣ b. Man nennt
den Komplementärteiler zu a (von b).
(d) Für a, b, c ∈ Z gilt:
(a ⋅ b) ∣ c
⇒
a ∣ c und b ∣ c
Die umgekehrte Implikation ist im allgemeinen falsch.
(e) Es gilt der Satz über die Vielfachensumme, d.h. für alle a, b, c, u, v ∈ Z gilt:
Insbesondere:
a ∣ b und a ∣ c
⇒
a ∣ (ub + vc)
a ∣ b und a ∣ c
⇒
a ∣ (b + c) und a ∣ (b − c)
Definition 1.3. (Teiler- und Vielfachenmenge)
6
(a) Für a ∈ Z definiert man die Teilermenge von a als die Menge aller positiven
Teiler von a, also:
def
T (a) = {x ∈ N; x ∣ a} ⊂ N
Für a1 , a2 , . . . , ak ∈ Z heißt weiterhin
def
T (a1 , a2 , . . . , ak ) = T (a1 )∩T (a2 )∩. . .∩T (ak ) = {x ∈ N; x ∣ aj für alle j = 1, . . . , k} ⊂ N
gemeinsame Teilermenge von a1 , a2 , . . . , ak .
(b) Für a ∈ Z definiert man die Vielfachenmenge von a als die Menge aller
positiven Vielfachen von a, also:
def
V (a) = {x ∈ N; a ∣ x} ⊂ N
Für a1 , a2 , . . . , ak ∈ Z heißt weiterhin
def
V (a1 , a2 , . . . , ak ) = V (a1 )∩V (a2 )∩. . .∩V (ak ) = {x ∈ N; aj ∣ x für alle j = 1, . . . , k} ⊂ N
gemeinsame Vielfachenmenge von a1 , a2 , . . . , ak .
Bemerkung 1.4. (Eigenschaften von Teiler- und Vielfachenmenge)
(a) Elemente von Teiler- bzw. Vielfachenmenge einer Zahl a ∈ Z sind definitionsgemäß nur die positiven Teiler bzw. Vielfache von a, also gilt stets T (a), V (a) ⊂ N.
(b) Offenbar gilt T (a) = T (−a) und V (a) = V (−a) für alle a ∈ Z.
(c) Zur Anzahl der positiven Teiler einer Zahl a ∈ Z beachte man:
Es gilt T (0) = N.
Es gilt T (1) = T (−1) = {1}.
Für alle a ∈ Z ∖ {−1, 0, 1} gilt 2 ≤ ∣T (a)∣ ≤ ∣a∣.
(Man beachte dabei, dass stets 1, a ∈ T (a) gilt.)
Teilermengen sind (mit Ausnahme der Teilermenge der 0) also insbesondere
immer endlich.
(d) Man nennt zwei Zahlen a, b ∈ Z ∖ {0} teilerfremd, falls T (a, b) = {1} gilt. Die
Zahlen 1 und −1 sind zu jeder weiteren Zahl teilerfremd.
(e) Es gilt V (0) = ∅ und V (1) = N. Für a ∈ Z ∖ {0} gilt V (a) = {n ⋅ ∣a∣; n ∈ N} und
folglich ∣V (a)∣ = ∞.
(f ) Für a, b ∈ Z gilt die Äquivalenz:
a∣b
⇔
T (a) ⊂ T (b)
⇔
T (a, b) = T (a)
⇔
V (b) ⊂ V (a)
⇔
V (a, b) = V (b)
Bemerkung 1.5. (Hassediagramme bzw. Teilerdiagramme)
(a) Eine gegebene endliche Teilmenge M ⊂ N kann mit einem Hassediadramm
bezüglich der Teilbarkeitsrelation (strukturiert) dargestellt werden. Dabei sind
folgende Regeln einzuhalten:
7
1 Teilbarkeit
Alle Elemente von M kommen vor (Knoten).
Sind x, y ∈ M mit x =/ y und x ∣ y, so muss y höher als x stehen.
Sind x, y ∈ M mit x =/ y, so werden x und y mit einem Strich (Kante)
verbunden, falls x ∣ y gilt, aber kein z ∈ M ∖ {x, y} mit x ∣ z und z ∣ y
existiert.
In einem solchen Hassediagramm gilt dann stets:
Sind x, y ∈ M mit x =/ y, so gilt x ∣ y genau dann, wenn y höher als x steht und
x und y (über eine oder mehrere Kanten) miteinander verbunden sind.
(b) Insbesondere für M = T (a) (mit einer Zahl a ∈ Z ∖ {0}) erhält man dabei ein
Teilerdiagramm von a. Es stellt alle Teiler von a und ihre Teilbarkeitsbeziehungen untereinander dar.
(c) Ein Hassediagramm kann auch für eine beliebige Halbordnung ≼ auf einer endlichen Menge M erstellt werden: Zwei Elemente von M (Knoten) werden mit
einem Strich (Kante) verbunden, falls x ≼ y gilt, aber kein z ∈ M ∖ {x, y} mit
x ≼ z und z ≼ y existiert. (In diesem Fall muss y höher als x stehen.)
Satz 1.6. (Division mit Rest)
Gegeben sei eine beliebige Zahl m ∈ N. Dann existieren zu jeder Zahl a ∈ Z eindeutige
Zahlen q ∈ Z und r ∈ {0, . . . , m − 1} mit
a=q⋅m+r
(im Fall a > 0 schreibt man auch
a ∶ m = q Rest r)
Die Zahl r wird als Rest bei Division von a durch m bezeichnet und ist die eindeutig
bestimmte Zahl r ∈ {0, . . . , m − 1} mit m ∣ (a − r). Es gilt genau dann m ∣ a, wenn
r = 0 ist.
8
2 Primzahlen und Primzahlzerlegung
Definition 2.1. (Primzahlen)
Eine Zahl p ∈ N heißt Primzahl, falls ∣T (p)∣ = 2. (Man sagt dann auch: p ist
prim.) Wir schreiben
def
P = {p ∈ N; p ist Primzahl} ⊂ N.
Eine Zahl n ∈ N mit n ≥ 2, die keine Primzahl ist, heißt zusammengesetzte Zahl.
Bemerkung 2.2. (Eigenschaften von Primzahlen)
(a) Die Zahl 1 ist keine Primzahl, denn es ist ∣T (1)∣ = ∣{1}∣ = 1.
(b) Für n ∈ N mit n ≥ 2 sind die folgenden Aussagen äquivalent:
(i) n ist eine Primzahl.
(ii) Es gilt T (n) = {1, n}.
(iii) Aus x∣n mit x ∈ N folgt x = 1 oder x = n.
(iv) Aus n = x ⋅ y mit x, y ∈ N folgt x = 1 oder y = 1 (und entsprechend y = n
oder x = n).
(c) Ist n ∈ N eine zusammengesetzte Zahl, so existieren also Zahlen x, y ∈ N mit
x ≥ 2 und y ≥ 2, so dass n = x ⋅ y ist. Mindestens eine dieser beiden Zahlen x, y
√
muss ≤ n sein. Folglich hat jede zusammengesetzte Zahl n einen Teiler a mit
√
2 ≤ a ≤ n. Für n ∈ N gilt also:
√
n ist prim ⇔ es gibt kein a ∈ T (n) mit 2 ≤ a ≤ n
Satz 2.3. (Existenz eines Primfaktors)
Jede Zahl n ∈ N mit n ≥ 2 hat einen kleinsten Teiler, der > 1 ist. Dieser ist stets
eine Primzahl. (Man nennt einen Teiler p ∈ T (n) mit p ∈ P Primfaktor von n.)
Folgerung 2.4. (Existenz eines kleinen Primfaktors)
Aus 2.3 und 2.2 (c) folgt: Jede zusammengesetzte Zahl n ∈ N hat einen Primfaktor
√
p ∈ T (n) mit 2 ≤ p ≤ n.
Folgerung 2.5. (Sieb des Eratosthenes)
Ein Algorithmus, mit dem man herausfinden kann, welche der Zahlen 2, 3, . . . , N
(für eine feste obere Grenze N ∈ N) Primzahlen sind, ist das sogenannte Sieb des
Eratosthenes. Man gehe dabei folgendermaßen vor:
1. Schreibe die Zahlen 2, 3, . . . , N aufsteigend in eine Liste.
2. Markiere die kleinste Zahl in der Liste (also die 2) und streiche alle Vielfachen
von 2, die größer oder gleich 22 sind.
3. Markiere die kleinste noch vorhandene, bisher noch nicht markierte Zahl p in der
Liste und streiche alle Vielfachen von p, die größer oder gleich p2 sind.
9
2 Primzahlen und Primzahlzerlegung
4. Wiederhole Schritt 3 solange bis die kleinste noch vorhandene, bisher noch nicht
√
markierte Zahl in der Liste größer als N ist.
5. Markiere alle noch vorhandenen Zahlen in der Liste.
Nach Durchführung dieses Verfahrens gilt: Die Primzahlen zwischen 2, . . . , N sind
genau die markierten Zahlen und die zusammengesetzten Zahlen zwischen 2, . . . , N
sind genau die gestrichenen Zahlen.
Bemerkung 2.6. (Häufigkeit von Primzahlen)
Man definiert die Funktion
π ∶ N → N, π(n) = ∣{p ∈ P; p ≤ n}∣
die zu einer Zahl n ∈ N angibt, wieviele Primzahlen sich unter den Zahlen 2, 3, . . . , n
befinden.
Satz 2.7. (Satz von Euklid)
Es gibt unendlich viele Primzahlen.
Bemerkung 2.8. (Verteilung der Primzahlen)
Die Verteilung der Primzahlen in den natürlichen Zahlen weist nur wenige erkennbare Regelmäßigkeiten auf. Wir wollen dennoch einige Beobachtungen diesbezüglich
hier festhalten:
(a) Bei Division durch 6 haben alle Primzahlen p ∈ P ∖ {2, 3} als Rest 5 oder 1.
(b) (Primzahlzwillige) Falls p, p + 2 ∈ P ist, nennt man das Paar (p, p + 2) einen
Primzahlzwilling. Es ist bisher nicht bekannt, ob es unendlich viele Primzahlzwillinge gibt.
(c) (Primzahllücken) Zu jeder Zahl ` ∈ N gibt es Zahlen n + 1, . . . , n + `, die alle
keine Primzahlen sind.
(d) (Häufigkeit von Primzahlen) Man kann beweisen, dass lim
n→∞
Insbesondere ist
lim π(n)
n→∞ n
π(n)
n
⋅ ln(n) = 1 gilt.
= 0.
Definition 2.9. (Primfaktorzerlegung)
Sei n ∈ N mit n ≥ 2. Sind p1 , p2 , . . . , pm ∈ P mit
m
n = ∏ pj = p1 ⋅ p2 ⋅ . . . ⋅ pm
j=1
so nennt man dieses Produkt eine Primfaktorzerlegung (PFZ) von n. (Dabei
besteht die PFZ einer Primzahl p ∈ P nur aus einem Faktor p1 = p.)
Satz 2.10. (Hauptsatz der Elementaren Zahlentheorie)
Zu jeder natürlichen Zahl n ≥ 2 existiert eine bis auf die Reihenfolge der Faktoren
eindeutige PFZ.
10
Folgerung 2.11. (Kanonische und normierte PFZ)
Sei n ∈ N mit n ≥ 2.
(a) Es existieren eindeutige Primzahlen p1 , . . . , pk ∈ P mit p1 < p2 < . . . < pk und
eindeutige e1 , . . . , ek ∈ N mit
k
n = ∏ pj ej = p1 e1 ⋅ p2 e2 ⋅ . . . ⋅ pk ek
j=1
Diese Darstellung von n heißt kanonische PFZ von n.
(b) Ist P = {p1 , p2 , p3 , . . .} mit p1 < p2 < p3 < . . ., so existieren eindeutige Zahlen
e1 , e2 , e3 , . . . ∈ N0 , von denen nur endlich viele ej =/ 0 sind, mit:
∞
n = ∏ pj ej = p1 e1 ⋅ p2 e2 ⋅ p3 e3 ⋅ . . .
j=1
Diese Darstellung von n heißt normierte PFZ von n. (Für unendlich viele
j ist der zur Primzahl pj gehörende Exponent ej = 0, so dass sich in diesen
Fällen pj ej = 1 ergibt. Das Produkt besteht also nur ’formal’ aus unendlich
vielen Faktoren.)
Bemerkung 2.12. (PFZ der Zahl 1)
Der Vollständigkeit halber bezeichnet man das sogenannte “leere Produkt“ als PFZ
der Zahl 1 ∈ N. In der normierten PFZ von 1 sind alle Exponenten ej = 0, also:
∞
1 = ∏ pj 0
j=1
Satz 2.13. (Zusammenhang zwischen PFZ und Produktbildung bzw. Teilbarkeit)
Gegeben seien natürliche Zahlen n, m ∈ N mit den normierten PFZ’en
∞
n = ∏ pj ej
∞
und
m = ∏ pj fj
j=1
j=1
(a) Die normierte PFZ des Produkts ist:
∞
n ⋅ m = ∏ pj ej +fj
j=1
(b) m ist genau dann ein Teiler von n, wenn alle fj ≤ ej sind. In diesem Fall gilt
∞
n ∶ m = ∏ pj ej −fj ∈ N
j=1
Folgerung 2.14. (Primzahlkriterium)
Für eine natürliche Zahl p ∈ N mit p ≥ 2 sind die folgenden Bedingungen äquivalent:
(i) p ist eine Primzahl.
(ii) Für alle a, b ∈ Z mit p ∣ (a ⋅ b) gilt p ∣ a oder p ∣ b.
(iii) Für alle a1 , . . . , ak ∈ Z mit p ∣ (a1 ⋅ . . . ⋅ ak ) gilt p ∣ aj für (mindestens) ein j.
11
2 Primzahlen und Primzahlzerlegung
Folgerung 2.15. (Teilbarkeitskriterium)
Zwei beliebige Zahlen a, b ∈ Z ∖ {0} sind genau dann teilerfremd, wenn sie keinen
gemeinsamen Primfaktor haben. Damit gilt für teilerfremde a, b (vergleiche 1.2):
(a ⋅ b) ∣ x
⇔
a ∣ x und b ∣ x
Definition 2.16. (Teileranzahlfunktion)
Wir nennen die Funktion
τ ∶ N → N, τ (n) = ∣T (n)∣
die jeder natürlichen Zahl die Anzahl ihrer (positiven) Teiler zuordnet, Teileranzahlfunktion. (Offenbar gilt τ (1) = 1, τ (p) = 2 für alle p ∈ P und τ (n) > 2 für alle
zusammengesetzten Zahlen n ∈ N.)
Folgerung 2.17. (Zusammenhang zwischen PFZ, Teilermenge und Teileranzahl)
k
(a) Gegeben sei eine Zahl n ∈ N mit (kanonischer) PFZ n = ∏ pj ej . Dann gilt:
j=1
⎫
⎧
⎪
⎪
⎪
⎪k
T (n) = ⎨∏ pj fj ; 0 ≤ fj ≤ ej für alle j = 1, . . . , k ⎬
⎪
⎪
⎪
⎪
⎭
⎩j=1
k
Daraus kann man folgern, dass τ (n) = ∏ (ej + 1) gilt.
j=1
∞
(b) Ist die normierte PFZ n = ∏ pj ej von n gegeben, so gilt entsprechend
j=1
⎧
⎫
⎪
⎪
⎪ ∞ fj
⎪
T (n) = ⎨∏ pj ; 0 ≤ fj ≤ ej für alle j = 1, 2, . . .⎬
⎪
⎪
⎪
⎪
⎩j=1
⎭
∞
und
τ (n) = ∏ (ej + 1)
j=1
Bemerkung 2.18. (PFZ und Teilerdiagramme)
Sind im Teilerdiagramm einer natürlichen Zahl n ≥ 2 zwei Teiler x, y ∈ T (n) mit
einer Kante verbunden (so dass y höher als x steht), so ist der Quotient y ∶ x stets
ein Primfaktor von n. Achtet man darauf, alle Kanten, die demselben Primfaktor
zugeordnet werden können, mit gleicher Richtung und gleicher Länge einzutragen,
so wird das Teilerdiagramm sehr übersichtlich (zumindest wenn n nicht mehr als
drei verschiedene Primfaktoren hat). Die Zahl der Primfaktoren von n bestimmt
dabei Aussehen und Struktur des Diagramms:
Hat n nur einen Primfaktor (kanonische PFZ n = pe ), so ist das Teilerdiagramm eine Strecke, die in e Teilstrecken gleicher Länge aufgeteilt ist. (In
diesem Fall ist die Teilbarkeitsrelation auf T (n) total.)
Hat n zwei Primfaktoren (kanonische PFZ n = p1 e1 ⋅ p2 e2 ), so ist das Teilerdiagramm ein Parallelogramm (bzw. Rechteck), dass in e1 ⋅ e2 zueinander
kongruente Parallelogramme (bzw. Rechtecke) aufgeteilt ist.
12
Hat n drei Primfaktoren (kanonische PFZ n = p1 e1 ⋅p2 e2 ⋅p3 e3 ), so erscheint das
Teilerdiagramm als Quader, der in e1 ⋅ e2 ⋅ e3 zueinander kongruente Quader
aufgeteilt ist.
Hat n mehr als 3 Primfaktoren, so wird das Teilerdigramm leicht unübersichtlich, da mehr als 3 Dimensionen nicht gut dargestellt bzw. erfasst werden
können. (Die kleinste Zahl mit mehr als 3 Primfaktoren ist 210 = 2 ⋅ 3 ⋅ 5 ⋅ 7.)
Beginnt man im Teilerdigramm bei der 1 und geht entlang der Kanten einen Weg
nach oben, so erhält man die PFZ der Teiler von n, indem man immer den der
jeweiligen Kante zugeordneten Primfaktor zur PFZ hinzufügt. Entsprechend kann
man auch entlang Kanten nach unten gehen und dabei immer den entsprechenden
Primfaktor streichen.
13
3 Größter gemeinsamer Teiler
3 Größter gemeinsamer Teiler
Definition und erste Eigenschaften
Definition 3.1. (Größter gemeinsamer Teiler)
Für a1 , . . . , ak ∈ Z definiert man den größten gemeinsamen Teiler als
def
ggT(a1 , . . . , ak ) = max T (a1 , . . . , ak )
def
falls mindestens ein aj =/ 0 ist. (Sind alle aj = 0, so sei ggT(a1 , . . . , ak ) = 0.)
Bemerkung 3.2. (Elementare Eigenschaften des ggT)
Gegeben seien beliebige Zahlen a1 , . . . , ak , b1 , . . . , bl ∈ Z.
(a) Falls mindestens eine der Zahlen aj =/ 0 ist, ist die Teilermenge T (a1 , . . . , ak )
eine endliche und nichtleere Teilmenge von N. Sie hat damit also ein maximales
Element und somit ist Definition 3.1 sinnvoll.
(b) Es gilt T (a1 , . . . , ak ) = T (∣a1 ∣, . . . , ∣ak ∣) und folglich ggT(a1 , . . . , ak ) = ggT (∣a1 ∣, . . . , ∣ak ∣).
(c) Gilt {a1 , . . . , ak } = {b1 , . . . , bl } ⊂ Z, so ist T (a1 , . . . , ak ) = T (b1 , . . . , bl ) und folglich ggT(a1 , . . . , ak ) = ggT(b1 , . . . , bl ).
(d) Es gilt T (a1 , . . . , ak , 0) = T (a1 , . . . , ak ) und folglich ggT(a1 , . . . , ak , 0) = ggT(a1 , . . . , ak ).
(e) Es gilt T (a1 , . . . , ak , 1) = {1} und folglich ggT(a1 , . . . , ak , 1) = 1.
(f ) Es gilt ggT(a1 ) = ∣a1 ∣.
(g) Gilt a1 ∣ a2 , so ist T (a1 , a2 ) = T (a1 ) und folglich ggT(a1 , a2 ) = ∣a1 ∣.
(h) Zwei Zahlen a, b ∈ Z ∖ {0} sind genau dann teilerfremd, wenn ggT(a, b) = 1 gilt.
Satz 3.3. (Zusammenhang zwischen ggT und PFZ)
Gegeben seien a1 , a2 , . . . , ak ∈ N mit den normierten PFZ’en:
∞
(1)
a1 = ∏ pj ej ,
j=1
(2)
∞
a2 = ∏ pj ej ,
∞
...,
j=1
(k)
ak = ∏ pj ej
j=1
Dann sind die gemeinsamen Teiler x ∈ T (a1 , . . . , ak ) genau die Zahlen mit einer
normierten PFZ
∞
x = ∏ pj fj
wobei fj ≤ min {ej , ej , . . . , ej } für alle j ∈ N gilt
(1)
(2)
(k)
j=1
Folglich hat der größte gemeinsame Teiler dieser Zahlen die normierte PFZ:
∞
ggT(a1 , . . . , ak ) = ∏ pj
j=1
Folgerung 3.4. (Weitere Eigenschaften des ggT)
Gegeben seien beliebige Zahlen a1 , . . . , ak ∈ Z.
14
(1)
(2)
(k)
(min{ej ,ej ,...,ej })
(a) Für eine beliebige Zahl x ∈ Z gilt die Äquivalenz:
x∣aj für alle j = 1, . . . , k
⇔
x∣ggT(a1 , . . . , ak )
Also ist T (a1 , . . . , ak ) = T (ggT(a1 , . . . , ak ))
(b) Es gilt ggT(a1 , . . . , ak ) = ggT(ggT(a1 , . . . , ak−1 ), ak ).
(c) Für jede Zahl b ∈ Z gilt ggT(b ⋅ a1 , . . . , b ⋅ ak ) = ∣b∣ ⋅ ggT(a1 , . . . , ak ).
(d) Für a, b ∈ Z ∖ {0} sind die Zahlen
a
b
,
ggT(a,b) ggT(a,b)
∈ Z stets teilerfremd.
Satz 3.5. (Zusammenhang zwischen ggT und Division mit Rest)
(a) Für alle a, b, s ∈ Z gilt
T (a, b) = T (a + s ⋅ b, b)
und folglich
ggT(a, b) = ggT(a + s ⋅ b, b)
(b) Seien n, m ∈ N. Bestimmt man die (nach 1.6 eindeutig existierenden) Zahlen
q, r ∈ N mit 0 ≤ r < m und n = q ⋅ m + r, so gilt
T (n, m) = T (r, m)
und
ggT(n, m) = ggT(r, m)
Folgerung 3.6. (Euklidischer Algorithmus)
Gegeben seien n, m ∈ N. Dann lässen sich T (n, m) und ggT(n, m) bestimmen, indem
man (unter fortlaufender Anwendung von 3.5 (b)) immer wieder die Größere der
beiden Zahlen durch den Rest bei Division der Größeren durch die Kleinere ersetzt.
Dies tut man solange bis eine der beiden Zahlen 0 ist, die andere Zahl entspricht
dann dem ggT von n und m. (Da die auftretenden Reste immer kleiner werden,
kommt dieses Verfahren garantiert immer zum Ende.)
Linearkombinationen ganzer Zahlen
Definition 3.7. (Linearkombination)
Für gegebene Zahlen a, b ∈ Z nennt man eine Zahl c ∈ Z (ganzzahlige) Linearkombination von a und b, falls x, y ∈ Z mit c = x ⋅ a + y ⋅ b existieren. Wir schreiben
def
L(a, b) = {c ∈ Z; c ist Linearkombination von a und b} = {x ⋅ a + y ⋅ b; x, y ∈ Z} ⊂ Z
für die Menge der Linearkombinationen von a und b.
Satz 3.8. (Linearkombinationen sind genau die Vielfachen des ggT)
Für gegebene Zahlen a, b ∈ Z ist c ∈ Z genau dann eine Linearkombination von a
und b, falls c ein Vielfaches von ggT(a, b) ist. Es gilt also:
L(a, b) = V (ggT(a, b))
Folgerung 3.9. (Spezialfälle)
15
3 Größter gemeinsamer Teiler
(a) Für a, b ∈ Z gilt L(a, 0) = V (a) und L(0, b) = V (b). Außerdem ist L(0, 0) = {0}.
(b) Sind a, b ∈ Z ∖ {0} teilerfremd, so gilt L(a, b) = Z.
Bemerkung 3.10. (Erweiterter Euklidischer Algorithmus)
Seien a, b ∈ Z ∖ {0} gegeben.
(a) Nach 3.8 ist ggT(a, b) eine Linearkombination von a und b. Es existieren also
Zahlen x, y ∈ Z mit ggT(a, b) = x ⋅ a + y ⋅ b. Mit dem erweiterten Euklidischen Algorithmus lassen sich solche Zahlen x, y bestimmen. Man beachte
dabei zunächst:
Sind zwei Linearkombinationen
c1 = x1 ⋅ a + y1 ⋅ b,
c2 = x2 ⋅ a + y2 ⋅ b ∈ L(a, b)
gegeben und dividiert man diese mit Rest (also z.B. c1 = q ⋅ c2 + r mit 0 ≤ r < c2 ),
so ist der Rest r ebenfalls eine Linearkombination von a und b. Genauer gilt:
r = c1 − q ⋅ c2 = x1 ⋅ a + y1 ⋅ b − q ⋅ (x2 ⋅ a + y2 ⋅ b) = (x1 − qx2 ) ⋅ a + (y1 − qy2 ) ⋅ b
Beginnend mit
∣a∣ = (±1) ⋅ a + 0 ⋅ b
und
∣b∣ = 0 ⋅ a + (±1) ⋅ b
kann man daher durch fortlaufende Division mit Rest immer kleinere natürliche
Zahlen als Linearkombination von a und b darstellen. Geht man dabei wie in
3.6 vor, so erhält man (nach endlich vielen Schritten) ggT(∣a∣, ∣b∣) = ggT(a, b)
als auftretenden Rest und findet damit auch die gesuchte Linearkombination
ggT(a, b) = x ⋅ a + y ⋅ b.
(b) Ist c ein Vielfaches von ggT(a, b), so existiert eine Zahl z ∈ Z mit c = z⋅ggT(a, b).
Bestimmt man zunächst x̃, ỹ ∈ Z mit ggT(a, b) = x̃ ⋅ a + ỹ ⋅ b (wie in (a)), so erhält
man daraus:
c = ( z ⋅ x̃ ) ⋅ a + ( z ⋅ ỹ ) ⋅ b
±
±
def
=x
def
=y
Damit hat man c als Linearkombination von a und b dargestellt.
Diophantische Gleichungen
Definition 3.11. (Lineare Diophantische Gleichungen)
Sind a, b, c ∈ Z gegeben, so heißt die Gleichung
(∗)
a⋅x+b⋅y =c
mit den beiden Unbekannten x, y ∈ Z
lineare Diophantische Gleichung. Die Lösungsmenge der Gleichung (∗) ist
definiert durch
def
L(∗) = {(x, y) ∈ Z × Z; a ⋅ x + b ⋅ y = c} ⊂ Z × Z,
ihre Elemente heißen Lösungen von (∗). Falls L(∗) =/ ∅ ist, heißt (∗) lösbar.
16
Bemerkung 3.12. (Spezialfälle)
Wir betrachten (∗) a ⋅ x + 0 ⋅ y = c mit a, c ∈ Z und a =/ 0. Dann gilt:
– Falls a ∤ c gilt, ist (∗) nicht lösbar, also L(∗) = ∅.
– Falls a ∣ c gilt, ist
c
a
∈ Z. Damit folgt:
(x, y) löst (∗)
⇔
a⋅x=c
⇔
x=
c
a
und y ∈ Z beliebig
Folglich ist dann L(∗) = {( ac , y) ; y ∈ Z} = { ac } × Z.
Analog hat (∗∗) 0 ⋅ x + b ⋅ y = c mit b, c ∈ Z und b =/ 0 die Lösungsmenge:
⎧
⎪
∅
, falls b ∤ c
⎪
L(∗∗) = ⎨
c
⎪
⎪
⎩ {(x, b ) ; x ∈ Z} , falls b ∣ c
⎫
⎪
⎪
⎬
⎪
⎪
⎭
Schließlich ist (∗ ∗ ∗) 0 ⋅ x + 0 ⋅ y = c
– unlösbar (also L(∗∗∗) = ∅), falls c =/ 0 ist.
– allgemeingültig (also L(∗∗∗) = Z × Z), falls c = 0 ist.
Bemerkung 3.13. (Lösbarkeit einer Diophantischen Gleichung)
Eine Diophantische Gleichung a ⋅ x + b ⋅ y = c mit gegebenen a, b, c ∈ Z ist genau
dann lösbar, wenn c eine Linearkombination von a und b ist, also nach 3.8 genau
dann, wenn ggT(a, b) ∣ c gilt. In diesem Fall können wir mit dem in 3.10 beschriebenen Vorgehen stets eine Lösung (x0 , y0 ) der Gleichung bestimmen.
Bemerkung 3.14. (Zeichnerische Lösung einer Diophantischen Gleichung)
Gegeben sei eine Diophantische Gleichung (∗) a ⋅ x + b ⋅ y = c mit a, b, c ∈ Z.
Wir betrachten zunächst den Fall b =/ 0. Für (x, y) ∈ Q × Q gilt die Äquivalenz:
(x, y) löst (∗)
⇔
a⋅x+b⋅y =c
⇔
a
c
y =− ⋅x+
b
b
⇔
wobei g(∗) die Gerade mit Steigung − ab und y-Achsenabschnitt
(x, y) ∈ g(∗)
c
b
ist. Die
“rationalen Lösungen“ von (∗) entsprechen also genau den Punkten auf der
(Q) def
Geraden, das heißt: L(∗) = {(x, y) ∈ Q × Q; a ⋅ x + b ⋅ y = c} = g(∗)
Die Punkte aus Z × Z bilden ein “Gitter“ in der Ebene. Die ganzzahligen
Lösungen von (∗) sind genau die Punkte, in denen die Gerade g(∗) dieses
Gitter schneidet: L(∗) = g(∗) ∩ (Z × Z)
Im Fall b = 0 und a =/ 0 gilt für (x, y) ∈ Q × Q:
(x, y) löst (∗)
⇔
a⋅x=c
⇔
x=
c
a
⇔
(x, y) ∈ g(∗)
wobei g(∗) die zur y-Achse parallele Gerade durch die Punkte ( ac , y) (y ∈ Q)
ist. Wie im Fall b =/ 0 entsprechen die ganzzahligen Lösungen von (∗) den
Schnittpunkten von g(∗) mit dem Gitter Z × Z.
17
3 Größter gemeinsamer Teiler
Satz 3.15. (Allgemeine Lösung einer Diophantischen Gleichung)
Gegeben sei eine beliebige Diophantische Gleichung (∗) a ⋅ x + b ⋅ y = c mit a, b, c ∈ Z.
Wir betrachten hier nur noch den Fall, dass a =/ 0 und b =/ 0 ist (für a = 0 oder b = 0
siehe man 3.12). Es gilt:
(a) Falls ggT(a, b) ∤ c gilt, so ist L(∗) = ∅.
(b) Falls a und b teilerfremd sind, ist (∗) auf jeden Fall lösbar und es gilt: Ist eine
Lösung (x0 , y0 ) ∈ Z×Z von (∗) bereits bestimmt, so ist ein beliebiges Zahlenpaar
(x, y) ∈ Z × Z genau dann eine Lösung von (∗), falls eine Zahl t ∈ Z mit
x = x0 + t ⋅ b
und
y = y0 − t ⋅ a
existiert. Folglich ist dann L(∗) = {(x0 + t ⋅ b, y0 − t ⋅ a) ; t ∈ Z}.
(c) Falls ggT(a, b) ∣ c gilt, so ist (∗) lösbar. Mittels Division durch ggT(a, b) erhält
man die Äquivalenzumformung:
(∗)
⇔
(
b
c
a
)⋅x + (
)⋅y = (
)
ggT(a, b)
ggT(a, b)
ggT(a, b)
Ist eine Lösung (x0 , y0 ) ∈ Z × Z von (∗) bereits bestimmt, so ergibt sich:
L(∗) = {(x0 + t ⋅
b
a
, y0 − t ⋅
) ; t ∈ Z}
ggT(a, b)
ggT(a, b)
Kleinstes gemeinsames Vielfaches
Definition 3.16. (Kleinstes gemeinsames Vielfaches)
Für a1 , . . . , ak ∈ Z definiert man das kleinste gemeinsame Vielfache als
kgV(a1 , . . . , ak ) = min V (a1 , . . . , ak )
def
falls alle aj =/ 0 sind. (Ist mindestens ein aj = 0, so sei kgV(a1 , . . . , ak ) = 0.)
Bemerkung 3.17. (Elementare Eigenschaften des kgV)
Gegeben seien beliebige Zahlen a1 , . . . , ak ∈ Z.
(a) Falls alle Zahlen aj =/ 0 sind, ist die Teilermenge V (a1 , . . . , ak ) eine nichtleere Teilmenge von N. Sie hat damit also ein minimales Element und somit ist
Definition 3.16 sinnvoll.
Falls (mindestens) ein aj = 0 ist, so ist 0 das einzige gemeinsame Vielfache von
a1 , . . . , ak in Z. Da (nach unserer Definition) 0 ∉ N ist, folgt V (a1 , . . . , ak ) = ∅.
def
Die Definiton für diesen Fall kgV(a1 , . . . , ak ) = 0 erscheint sinnvoll.
(b) Es gilt V (a1 , . . . , ak ) = V (∣a1 ∣, . . . , ∣ak ∣) und folglich kgV(a1 , . . . , ak ) = kgV (∣a1 ∣, . . . , ∣ak ∣).
(c) Gilt {a1 , . . . , ak } = {b1 , . . . , bl } ⊂ Z, so ist V (a1 , . . . , ak ) = V (b1 , . . . , bl ) und folglich kgV(a1 , . . . , ak ) = kgV(b1 , . . . , bl ).
18
(d) Es gilt V (a1 , . . . , ak , 1) = V (a1 , . . . , ak ) und folglich kgV(a1 , . . . , ak , 1) = kgV(a1 , . . . , ak ).
(e) Es gilt kgV(a1 ) = ∣a1 ∣.
(f ) Gilt a1 ∣ a2 , so ist V (a1 , a2 ) = V (a2 ) und folglich kgV(a1 , a2 ) = ∣a2 ∣.
Satz 3.18. (Zusammenhang zwischen kgV und PFZ)
Gegeben seien n1 , n2 , . . . , nk ∈ N mit den normierten PFZ’en:
∞
(1)
n 1 = ∏ p j ej ,
j=1
∞
(2)
∞
n2 = ∏ pj ej ,
...,
j=1
(k)
nk = ∏ pj ej
j=1
Dann hat das kleinste gemeinsame Vielfache dieser Zahlen die normierte PFZ:
∞
kgV(n1 , . . . , nk ) = ∏ pj
(1)
(2)
(k)
(max{ej ,ej ,...,ej })
j=1
Folgerung 3.19. (Weitere Eigenschaften des kgV)
Gegeben seien beliebige Zahlen a1 , . . . , ak ∈ Z.
(a) Für eine beliebige Zahl x ∈ Z gilt die Äquivalenz:
aj ∣ x für alle j = 1, . . . , k
⇔
kgV(a1 , . . . , ak ) ∣ x
Also ist V (a1 , . . . , ak ) = V (kgV(a1 , . . . , ak )).
(b) Es gilt
kgV(a1 , . . . , ak ) = kgV(kgV(a1 , . . . , ak−1 ), ak )
(c) Für jede Zahl b ∈ Z gilt
kgV(b ⋅ a1 , . . . , b ⋅ ak ) = ∣b∣ ⋅ kgV(a1 , . . . , ak )
(d) Für zwei Zahlen a, b ∈ Z gilt stets:
ggT(a, b) ⋅ kgV(a, b) = a ⋅ b
(Damit hat man eine weitere Möglichkeit, kgV(a, b) zu berechnen. Für mehr als
zwei Zahlen funktioniert dies allerdings nicht.)
Folglich sind a, b genau dann teilerfremd, wenn kgV(a, b) = a ⋅ b ist.
19
4 Kongruenzrelation und Restklassen
4 Kongruenzrelation und Restklassen
Kongruenzen
Definition 4.1. (Kongruenzen)
Gegeben sei eine natürliche Zahl m ∈ N. Für a, b ∈ Z definiert man
a ≡ b mod m
(a ist kongruent zu b modulo m)
falls m ∣ (a−b). (Ist a nicht kongruent zu b modulo m, so schreibt man a ≢ b mod m.)
Man nennt die Beziehung a ≡ b mod m eine Kongruenz zum Modul m.
Bemerkung 4.2. (Eigenschaften der Kongruenzrelation)
Sei m ∈ N gegeben.
(a) Die Kongruenzrelation modulo m ist eine Äquivalenzrelation auf Z, das heißt
für alle a, b, c ∈ Z gilt:
(Reflexivität)
a ≡ a mod m
(Symmetrie)
a ≡ b mod m ⇒ b ≡ a mod m
(a ≡ b mod m ∧ b ≡ c mod m) ⇒ a ≡ c mod m
(Transitivität)
Für a, b ∈ Z mit a ≡ b mod m gilt daher:
(b) Für a ∈ Z gilt:
x ≡ a mod m ⇔ x ≡ b mod m (x ∈ Z)
a ≡ 0 mod m ⇔ m ∣ a.
(c) Wir betrachten eine Zahl a ∈ Z und dividieren sie (mit Rest) durch m:
a=q⋅m+r
(mit q ∈ Z, r ∈ {0, . . . , m − 1})
Dann gilt a ≡ r mod m.
(d) Wir betrachten zwei Zahlen a, b ∈ Z und dividieren beide (mit Rest) durch m:
a = qa ⋅ m + ra
und
b = qb ⋅ m + rb
(mit qa , qb ∈ Z, ra , rb ∈ {0, . . . , m − 1})
a ≡ b mod m ⇔ ra = rb
Dann gilt:
Satz 4.3. (Rechnen mit Kongruenzen)
Für k, m ∈ N und a, b, c ∈ Z gelten die folgenden Implikationen:
(a) a ≡ b mod m ⇔ a + c ≡ b + c mod m
(b) a ≡ b mod m ⇒ a ⋅ c ≡ b ⋅ c mod m (die umgekehrte Implikation ist falsch)
(c) Falls ggT(c, m) = 1 ist, gilt:
(d) a ≡ b mod
m
ggT(c,m)
a ≡ b mod m ⇔ a ⋅ c ≡ b ⋅ c mod m
⇔ a ⋅ c ≡ b ⋅ c mod m
(e) Im Fall k ∣ m gilt:
20
a ≡ b mod m
⇒
a ≡ b mod k
a ≡ b mod k
⇔
es existiert ein u ∈ {0, 1, . . . , m
− 1} mit a ≡ b + u ⋅ k mod m
k
Definition 4.4. (Lineare Kongruenzen)
Sind m ∈ N und a, b ∈ Z gegeben, so nennt man
(△)
a ⋅ x ≡ b mod m
mit der Unbekannten x ∈ Z
eine lineare Kongruenz modulo m. Ihre Lösungsmenge ist gegeben durch
L(△) = {x ∈ Z; a ⋅ x ≡ b mod m} ⊂ Z
Man nennt (△) lösbar, falls L(△) =/ ∅ ist.
Bemerkung 4.5. (Lösung mit Hilfe einer Diophantischen Gleichung)
Die Lösungen einer linearen Kongruenz
(△)
a ⋅ x ≡ c mod m
(mit gegebenen m ∈ N und a, c ∈ Z)
sind genau die Zahlen x ∈ Z, die (mit einer geeigneten Zahl y ∈ Z) zu einer Lösung
(x, y) ∈ L(∗) der zugehörigen Diophantischen Gleichung (∗) a ⋅ x + m ⋅ y = c ergänzt
werden können. Aus 3.15 ergibt sich damit:
Im Fall ggT(a, m) ∤ c ist (△) nicht lösbar.
Im Fall ggT(a, m) ∣ c ist (△) lösbar. Hat man eine Lösung x0 ∈ L(△) gefunden,
so folgt
L(△) = {x0 + t ⋅
m
m
; t ∈ Z} = {x ∈ Z; x ≡ x0 mod
}
ggT(a, m)
ggT(a, m)
Man kann also eine lineare Kongruenz stets über eine zugehörige Diophantische
Gleichung lösen.
Bemerkung 4.6. (Lösung mit Äquivalenzumformungen)
Gegeben sei eine lineare Kongruenz
(△)
a ⋅ x ≡ c mod m
(mit gegebenen m ∈ N und a, c ∈ Z)
(a) Wir betrachten zunächst den Fall, dass a und m teilerfremd sind. (Dann gilt
auf jeden Fall ggT(a, m) ∣ c, folglich ist (△) lösbar.)
Man kann (△) nun wie folgt lösen:
1.) Mit Hilfe des erweiterten Euklidischen Algorithmus’ (siehe 3.10) bestimmt
man Zahlen u, v ∈ Z mit u⋅a+v ⋅m = 1. Die Zahl u erfüllt nun u⋅a ≡ 1 mod m
und folglich auch:
ggT(u, m) = 1
u ⋅ a ⋅ x ≡ x mod m
(unabhängig von x)
2.) Man kann nun die lineare Kongruenz (△), indem man sie zunächst mit u
multipliziert (siehe 4.3 (c)) und dann u ⋅ a ⋅ x durch x ersetzt (siehe 4.2 (a)):
(△)
a⋅x ≡ c mod m
4.3 (c)
⇐⇒
u⋅a⋅x ≡ u⋅c mod m
4.2 (a)
⇐⇒
x ≡ u⋅c mod m
21
4 Kongruenzrelation und Restklassen
L(△) = {x ∈ Z; x ≡ u ⋅ c mod m}
Folglich:
(b) Nun betrachten wir den Fall, dass a und m nicht teilerfremd sind. Falls nun
ggT(a, m) ∤ c gilt, so ist L(△) = ∅. Wir untersuchen also nur noch den Fall,
dass ggT(a, m) ∣ c gilt. Man kann (△) dann wie folgt lösen:
1.) Gemäß 4.3 (d) kann man (△) äquivalent umformen, indem man durch
ggT(a, m) teilt:
(△)
a⋅x ≡ c mod m
c
m
a
⋅x ≡
mod
ggT(a, m)
ggT(a, m)
ggT(m, ggT(a, m))
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸¹
¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹ ¶
m
⇔
= ggT(a,m)
2.) In der dabei enstandenen linearen Kongruenz
a′ ⋅ x ≡ c′ mod m′
(mit a′ =
a
c
m
, c′ =
, m′ =
)
ggT(a, m)
ggT(a, m)
ggT(a, m)
sind a′ und m′ stets teilerfremd. Man kann sie also wie in (a) lösen und
hat damit natürlich auch (△) gelöst.
3.) (wahlweise) Die Lösungen der ursprünglichen Kongruenz modulo m sind
nun in der Form einer (vollständig aufgelösten) Kongruenz modulo
m
ggT(a,m)
gegeben. Mit Hilfe von 4.3 (e) kann man diese nun (falls gewünscht) wieder
in mehrere Kongruenzen modulo m überführen.
Restklassen und Verknüpfungen von Restklassen
Bemerkung 4.7. (Einführung von Restklassen)
Sei m ∈ N gegeben.
(a) Wie wir schon gesehen haben, ist die Kongruenzrelation modulo m eine Äquivalenzrelation auf Z. Die Äquivalenzklasse zu einer Zahl a ∈ Z bezeichnen wir
mit
def
def
a = [a]m = {x ∈ Z; x ≡ a mod m}
(b) Offenbar gilt stets a ∈ a.
Wie bei jeder Äquivalenzrelation gilt für beliebige Zahlen a, b ∈ Z:
a=b
, falls a ≡ b mod m
a ∩ b = ∅ , falls a ≢ b mod m
Jede Äquivalenzklasse kann daher auf unendlich viele Arten dargestellt werden.
Es gilt:
22
a = x für jedes x ∈ a
(c) Bei Äquivalenzrelationen ist es üblich, jedes Element x ∈ a einer Äquivalenzklasse als Repräsentant von a zu bezeichnen. Ein Repräsentant der Äquivalanzklasse von a ist der Rest bei Division von a durch m:
a = q⋅m+r (q ∈ Z, r ∈ {0, . . . , m − 1})
⇒
a ≡ r mod m
⇒
r∈a
⇒
a=r
Man bezeichnet die Äquivalenzklasse von a daher auch als Restklasse von a
(modulo m).
(d) Es gibt genau m Restklassen modulo m, nämlich die Restklassen 0, 1, . . . , m − 1.
Die Menge aller Restklassen modulo m bezeichnen wir mit
def
Rm = {a; a ∈ Z} = {0, 1, . . . , m − 1}
Satz 4.8. (Addition von Restklassen)
Sei m ∈ N gegeben.
(a) Für a1 , a2 , b1 , b2 ∈ Z mit a1 ≡ a2 mod m und b1 ≡ b2 mod m gilt stets auch
a1 + b1 ≡ a2 + b2 mod m.
(b) Zwei Restklassen a, b ∈ Rm können durch
def
a ⊕ b = a + b ∈ Rm
’addiert’ werden. Durch diese Definition entsteht kein Widerspruch, denn falls
a1 = a2 und b1 = b2 gilt, ist stets auch a1 ⊕ b1 = a2 ⊕ b2 .
(c) Die in (b) definierte Addition ⊕ ist eine Verknüpfung auf Rm , das heißt je
zwei Elementen von Rm wird durch ⊕ wiederum ein Element aus Rm zugeordnet.
Dabei gilt:
(Kommutativgesetz) Für alle a, b ∈ Rm gilt a ⊕ b = b ⊕ a.
(Assoziativgesetz) Für alle a, b, c ∈ Rm gilt (a ⊕ b) ⊕ c = a ⊕ (b ⊕ c).
(Existenz eines neutralen Elements) Es gilt a⊕0 = 0⊕a = a für alle a ∈ Rm .
Man nennt daher auch 0 Neutrales Element bezüglich ⊕.
(Existenz inverser Elemente) Für alle a ∈ Rm gilt a ⊕ −a = −a ⊕ a = 0. Man
nennt daher auch −a Inverses Element zu a bezüglich ⊕.
Satz 4.9. (Multiplikation von Restklassen)
Sei m ∈ N gegeben.
(a) Für a1 , a2 , b1 , b2 ∈ Z mit a1 ≡ a2 mod m und b1 ≡ b2 mod m gilt stets auch
a1 ⋅ b1 ≡ a2 ⋅ b2 mod m.
(b) Zwei Restklassen a, b ∈ Rm können durch
def
a ⊙ b = a ⋅ b ∈ Rm
’multipliziert’ werden. Durch diese Definition entsteht kein Widerspruch, denn
falls a1 = a2 und b1 = b2 gilt, ist stets auch a1 ⊙ b1 = a2 ⊙ b2 .
23
4 Kongruenzrelation und Restklassen
(c) Die in (b) definierte Multiplikation ⊙ ist eine Verknüpfung auf Rm , das heißt
je zwei Elementen von Rm wird durch ⊙ wiederum ein Element aus Rm zugeordnet. Dabei gilt:
(Kommutativgesetz) Für alle a, b ∈ Rm gilt a ⊙ b = b ⊙ a.
(Assoziativgesetz) Für alle a, b, c ∈ Rm gilt (a ⊙ b) ⊙ c = a ⊙ (b ⊙ c).
(Distributivgesetz) Für alle a, b, c ∈ Rm gilt (a ⊕ b) ⊙ c = (a ⊙ c) ⊕ (b ⊙ c).
(Existenz eines neutralen Elements) Es gilt a⊙1 = 1⊙a = a für alle a ∈ Rm .
Man nennt daher auch 1 Neutrales Element bezüglich ⊙.
Bezüglich ⊙ existieren nicht immer inverse Elemente.
Für a, b ∈ Rm gilt stets die Implikation:
a = 0 oder b = 0
⇒
a⊙b=0
Die umgekehrte Implikation ist für manche m ∈ N jedoch falsch. Man nennt
Elemente a, b ∈ Rm ∖ {0} mit a ⊙ b = 0 Nullteiler.
(d) Für a ∈ Rm und n ∈ N definiert man
(a)
n def
= a ⊙ a ⊙ ... ⊙ a
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¸ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¶
n-mal
0 def
n
Es ist sinnvoll zusätzlich (a) = 1 zu definieren. Es gilt stets (a) = an . In Rm
gelten die Potenzgesetze in Verbindung mit ⊙:
n
n
(a ⊙ b) = an ⊙b ,
an ⊙am = an+m ,
(an )
m
= an⋅m
(für a, b ∈ Rm , n, m ∈ N0 )
Anwendungen
Bemerkung 4.10. (Bestimmung von Resten)
Für a ∈ Z und m ∈ N gilt: Die Division a ∶ m hat den Rest r, falls r ∈ {0, . . . , m − 1}
die Zahl ist, für die a = r ∈ Rm gilt. Der Rest der Division a ∶ m kann also bestimmt
werden, indem man die Restklasse a in Rm vereinfacht. Dabei lassen sich ’Addition
und ’Multiplikation’ in Rm sinnvoll einsetzen.
Folgerung 4.11. (Teilbarkeitsregeln)
Wir betrachten eine natürliche Zahl a ∈ N und ihre Darstellung im Dezimalsystem:
n
a = a0 +a1 ⋅10+a2 ⋅102 +. . .+an ⋅10n = ∑ ak ⋅10k
mit geeigneten ’Ziffern’ a0 , . . . , an ∈ {0, . . . , 9}
k=0
(i) In R2 gilt 10 = 0. Daraus folgt a = a0 . Insbesondere ist a genau dann durch 2
teilbar, wenn a0 durch 2 teilbar ist.
(ii) In R5 gilt 10 = 0. Daraus folgt a = a0 . Insbesondere ist a genau dann durch 5
teilbar, wenn a0 durch 5 teilbar ist.
24
(iii) In R4 gilt 100 = 0. Daraus folgt a = a0 + a1 ⋅ 10. Insbesondere ist a genau dann
durch 4 teilbar, wenn a0 + a1 ⋅ 10 durch 4 teilbar ist.
(iv) In R8 gilt 1000 = 0. Daraus folgt a = a0 + a1 ⋅ 10 + a2 ⋅ 102 . Insbesondere ist a
genau dann durch 8 teilbar, wenn a0 + a1 ⋅ 10 + a2 ⋅ 102 durch 8 teilbar ist.
Im Folgenden betrachten wir die Quersumme Q(a) und die alternierende Quersumme Qalt (a), definiert durch:
n
def
Q(a) = a0 +a1 +. . .+an = ∑ ak
und
k=0
n
def
Qalt (a) = a0 −a1 +a2 −a3 +. . .+(−1)n an = ∑ (−1)k ⋅ak
k=0
(v) In R3 gilt 10 = 1. Daraus folgt a = Q(a). Insbesondere ist a genau dann durch
3 teilbar ist, wenn Q(a) durch 3 teilbar ist.
(vi) In R9 gilt 10 = 1. Daraus folgt a = Q(a). Insbesondere ist a genau dann durch
9 teilbar ist, wenn Q(a) durch 9 teilbar ist.
(vii) In R11 gilt 10 = −1. Daraus folgt a = Qalt (a). Insbesondere ist a genau dann
durch 11 teilbar ist, wenn Qalt (a) durch 11 teilbar ist.
Invertierbarkeit bezüglich ⊙
Definition 4.12. (Invertierbare Restklassen)
Sei m ∈ N gegeben. Eine Restklasse a ∈ Rm heißt (bezüglich ⊙) invertierbar,
falls eine weitere Restklasse b ∈ Rm mit a ⊙ b = 1 existiert. In diesem Fall nennt
man b das Inverse von a (bezüglich ⊙) und schreibt auch a−1 für b. Die Menge
der invertierbaren Restklassen bezeichnet man mit
def
∗
Rm
= {a ∈ Rm ; a ist bzgl. ⊙ invertierbar} ⊆ Rm
Bemerkung 4.13. (Eigenschaften invertierbarer Restklassen)
Sei m ∈ N mit m ≥ 2 gegeben.
(a) Bzgl. ⊙ invertierbare Elemente von Rm sind niemals Nullteiler. (Anders formuliert: Nullteiler sind nicht invertierbar.)
(b) 0 ist nicht invertierbar.
∗
(c) Inverse Elemente zu a ∈ Rm
sind stets eindeutig bestimmt. (Ein Element aus Rm
hat also entweder kein oder genau ein Inverses.)
(d) 1 und m − 1 sind stets invertierbar mit 1
−1
= 1 und m − 1
∗
∗
(e) Falls a ∈ Rm
ist auch a−1 ∈ Rm
und es gilt (a−1 )
−1
−1
= m − 1.
= a.
∗
∗
(f ) Für a, b ∈ Rm
ist auch a ⊙ b ∈ Rm
mit
(a ⊙ b)
−1
−1
= a−1 ⊙ b
25
4 Kongruenzrelation und Restklassen
Satz 4.14. (Charakterisierung invertierbarer Restklassen und Bestimmung von Inversen)
Sei m ∈ N gegeben und a ∈ Z. Dann ist a ∈ Rm genau dann bezüglich ⊙ invertierbar,
wenn a und m teilerfremd sind. In diesem Fall kann man Zahlen u, v ∈ Z mit
1 = u ⋅ a + v ⋅ m bestimmen (vergleiche 3.10). Es gilt dann stets a−1 = u. (Insbesondere
ist u modulo m eindeutig bestimmt.)
Folgerung 4.15. (Invertierbarkeit in Rp )
Ist p ∈ P, so sind alle Elemente a ∈ Rp ∖ {0} bezüglich ⊙ invertierbar.
Also:
Rp∗ = {1, 2, . . . , p − 1}
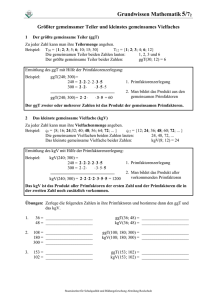
Definition 4.16. (Eulersche ϕ-Funktion)
Die Eulersche ϕ-Funktion ist definiert duch
def
∗
ϕ ∶ N → N, ϕ(m) = ∣Rm
∣ (= Anzahl der invertierbaren Elemente in Rm )
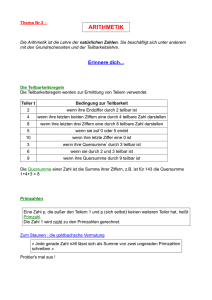
Bemerkung 4.17. (Berechnung von ϕ(m))
Nach 4.14 gilt ϕ(m) = ∣{a ∈ {1, . . . , m}; ggT(a, m) = 1}∣ für alle m ∈ N. Es folgt:
Für p ∈ P ist ϕ(p) = p − 1.
Für p ∈ P und e ∈ N ist ϕ(pe ) = pe − pe−1 = pe−1 ⋅ (p − 1).
Weiterhin gilt für m1 , m2 ∈ N stets:
m1 , m2 teilerfremd
⇒
ϕ(m1 ⋅ m2 ) = ϕ(m1 ) ⋅ ϕ(m2 )
k
Damit kann man ϕ(m) stets aus der (kanonischen) PFZ m = ∏ pj ej von m berechj=1
nen. Es gilt:
k
k
j=1
j=1
ϕ(m) = ∏ pj ej −1 ⋅ (pj − 1) = m ∏ (1 −
1
)
pj
Trägt man die Punkte (m, ϕ(m)) für m = 1, . . . , 1000 in ein Koordinatensystem ein,
so erhält man:
26
0
200
400
Phi(m)
600
800
1000
Eulersche Phi−Funktion
●●
●
●●
●
●
●●
●
● ● ●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
● ●
●
●
●●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●●
●
●
●
●●
● ●●
● ●
●
●
●
●
●●
●
●
●●
●
●
●
●
●●
●
● ●
●
●
●
●
●
●●
●●
●
●
●
● ●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●●
●
●
● ●
● ●
●
●
●●
●
● ● ●
●
●
●●
●
●
●●
●
●●
●
●
●
●
●
● ●
●●
●
●● ●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●●
● ●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●● ●
●●
●
●
●
●●
●●
●
●
●●
●
●
●
●●
●●
●●
●
●
●
●
●●
●●●● ●
● ●
●
●
●●
● ● ●
●●
●
●
● ●●
●●●
●● ●
●
●
●
●
● ●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
● ●● ● ●
●
●
●
●●● ●
● ●
●
●●● ●
●●
●
●
●●
●
●
●●
●●
●●
●● ●
●
●●
● ●●●
●
●● ●
● ●
●
● ● ●● ●
●● ● ● ●
●
●●
●●●
●● ● ● ●
●
● ●
●
●●● ●
●
●
●
●●
●
●●
●
● ●●● ● ● ● ● ● ●
●
●
●
●●
●
●
●
● ●
●●●●
●
●●
● ●●
●
●
●
● ● ● ●
●
●
● ●
●● ●
●
●
●
●
●
●
●●●
●
●
●●
●
●
●●
●●
●●
●
● ● ● ●
●●
●
●
●● ●
●
●
●
●● ●
●●● ●
●● ●
● ●
●
● ●
●
●
● ●
●●●●
●●●
●●●
●●●
●●●
●
●
●
● ●
●
●● ● ●
●●
●
● ●●●
●
●●
●
●
●
●
●
●●
●
●
●●●
●
●●
●●
●
●● ●
●●
●
●●
●●● ●
●
●
●●
● ●
● ●●● ● ●
●
● ●●
●
●●
●
●●
●
●
●
●●
●
●
● ●
●●
●
●●
●
●
●
●●●● ●
●● ●●●●
●●● ● ● ● ●
●●
●●● ●
● ●●●
●
●
●●
● ●●
● ●
●●
●
●
●●
●
● ●
●
●
●
● ●
●
●● ● ●● ●
●
● ●● ●●
●
●●
●
●
●
● ●
● ●● ● ●● ●
●●●
● ● ●●
●
●
●
● ●●
●
●●
● ●●
●● ●
● ●●
●
●● ● ●
●●
●
●
●
● ●●●
●
● ● ●● ● ●●●● ●
●
●
●
●
●
●
●
● ● ●
●
●
●
●●●
●●
●
●●
●●●
● ●● ●
●
●
●●●●●●
●
●
●●
●●
●● ●
●●●
●
●
● ●●●
● ●
●
●● ●●
●●●●
●● ● ●
●
● ●● ●
●●
●●●● ●●● ●
●●
● ● ●●● ●
●
●
●
●● ● ●
●
●
●
●
●
●● ●● ●●●
● ● ●●● ●
● ●● ● ● ● ●
●●
●
●●
●● ●●● ●●●
●●
● ●
● ● ●●● ●● ●
●●●
● ●● ●
●●
●
●
● ●● ●●●● ● ●
●
●
●● ●●● ●●●●
●
● ●●●● ●
●
●
●
●●● ●●●●
●●●●●
●●●●● ●
●
●●●
●●
●
●●
●
●
●
●● ●●●
●
●
●
●●
●
●●
● ●●●●●●
●
●
●
●
●
●●
●●
●
●
●
●●●●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
0
200
400
600
800
1000
m
27
5 Gruppen
5 Gruppen
Definition, Beispiele und erste Eigenschaften
Definition 5.1. (Gruppen)
(a) Ist G =/ ∅ eine beliebige Menge, so nennt man eine Abbildung
∗ ∶ G × G → G, (x, y) ↦ x ∗ y
eine Verknüpfung auf G. (Einfacher gesagt: Für beliebige Elemente x, y von G
ist x ∗ y ebenfalls ein Element von G.)
(b) Ist G =/ ∅ eine beliebige Menge und ∗ eine Verknüpfung auf G, so nennt man
(G, ∗) eine Gruppe, wenn die folgenden Bedingungen gelten:
(i) Assoziativgesetz: Für alle x, y, z ∈ G gilt (x ∗ y) ∗ z = x ∗ (y ∗ z).
(ii) Existenz eines Neutralen Elements: Es existiert ein Element e ∈ G
mit x ∗ e = e ∗ x = x für alle x ∈ G.
(Falls ∗ eine Addition + ist, schreibt man meist 0 statt e. Falls ∗ eine Multiplikation ⋅ ist, schreibt man meist 1 statt e.)
(iii) Existenz Inverser Elemente: Zu jedem Element x ∈ G existiert ein
weiteres Element Inv (x) ∈ G mit x ∗ Inv (x) = Inv (x) ∗ x = e.
(Falls ∗ eine Addition + ist, schreibt man meist −x statt Inv (x). Falls ∗ eine
Multiplikation ⋅ ist, schreibt man meist x−1 oder
1
x
statt Inv (x).)
Eine Gruppe (G, ∗) heißt kommutativ (bzw. abelsch), wenn zusätzlich gilt:
(iv) Kommutativgesetz: Für alle x, y ∈ G gilt x ∗ y = y ∗ x
Bemerkung 5.2. (Eigenschaften von Gruppen)
Sei nun (G, ∗) eine beliebige Gruppe. Dann gilt:
(a) Es gibt genau ein Neutrales Element in G.
(b) Es gilt die Kürzungsregel: Für alle x, y, z ∈ G gilt die Äquivalenz
x∗z =y∗z
⇔
x=y
⇔
z∗x=z∗y
(c) Jedes Element von G hat genau ein Inverses Element.
(d) Für alle x, y ∈ G gilt
Inv (Inv (x)) = x
und
Inv (x ∗ y) = Inv (y) ∗ Inv (x)
Bemerkung 5.3. (Iterierte Anwendung der Veknüpfung in der Gruppe)
def
Ist (G, ∗) eine Gruppe und x ∈ G, so definiert man x0 = e und
def
x(n) = x ∗ x ∗ . . . ∗ x
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¶
n-mal
28
und
def
x(−n) = Inv (x) ∗ Inv (x) ∗ . . . ∗ Inv (x)
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¶
n-mal
(für n ∈ N)
Für alle x, y ∈ G und alle n, m ∈ Z gelten nun die als ’Potenzgesetze’ bekannten
Rechenregeln:
x(1) = x,
x(−1) = Inv (x) ,
e(n) = e,
und falls (G, ∗) kommutativ ist, auch:
x(n) ∗ x(m) = x(n+m) ,
(x(n) )(m) = x(n⋅m)
x(n) ∗ y(n) = (x ∗ y)(n)
Definition 5.4. (Gruppenordnung und Elementordnung)
(a) Für eine Gruppe (G, ∗) nennt man ∣G∣ ∈ N ∪ {∞} die Ordnung der Gruppe
G. Man nennt die Gruppe (G, ∗) endlich, falls ∣G∣ ∈ N ist.
(b) Ist (G, ∗) eine endliche Gruppe, so existiert zu jedem x ∈ G ein n ∈ N mit
x(m) = e. Das kleinstmögliche solche m bezeichnet man als Ordnung von x:
def
ord (x) = min {m ∈ N; x(m) = e} ∈ N
Satz 5.5. (Zusammenhang zwischen Elementordnung und Gruppenordnung)
Gegeben sei eine endliche Gruppe ∣G∣. Dann gilt ord (x) ∣ ∣G∣ für alle x ∈ G. Daraus
folgt, dass für alle x ∈ G stets x(∣G∣) = e gilt.
Folgerung 5.6. (Satz von Euler und Kleiner Satz von Fermat)
(a) Für alle m ∈ N und alle a ∈ Z ∖ {0} mit ggT(a, m) = 1 gilt:
(b) Für alle p ∈ P und alle a ∈ Z gilt:
Ist a ∉ V (p), so gilt auch:
aϕ(m) ≡ 1 mod m
ap ≡ a mod p
ap−1 ≡ 1 mod p
29